Quantum-enhanced deliberation of learning agents using...
78
Projective Simulation Ion Implementation Quantum-enhanced deliberation of learning agents using trapped ions Quaint-EPSRC-FQXi Workshop on Quantum Cybernetics and Control University of Nottingham, January 20 th , 2015 Nicolai Friis Institute for Theoretical Physics, University of Innsbruck work in collaboration with Vedran Dunjko and Hans J. Briegel Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents
Transcript of Quantum-enhanced deliberation of learning agents using...

Projective SimulationIon Implementation
Quantum-enhanced deliberation of
learning agents using trapped ions
Quaint-EPSRC-FQXi Workshop on
Quantum Cybernetics and Control
University of Nottingham, January 20th, 2015
Nicolai Friis
Institute for Theoretical Physics, University of Innsbruck
work in collaboration with Vedran Dunjko and Hans J. Briegel
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Outline
Projective Simulation
• Projective simulation (PS) agents
• Standard PS vs. reflecting PS (RPS)
• The RPS deliberation process
Quantum-enhanced deliberation using trapped ions
• Flexible implementations — coherent controlization
• Trapped ion setups
• Coherent controlization using trapped ions
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
C1 C2
C3 C4
p21
p12
p13 p31
p34
p43
p42p24
p11 p22
p33 p44
p14
p41
p23
p32
C1
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Projective Simulation (PS) Agents1
Agent may be. . .
• embodied
• autonomous
• active/passive
Env
iron
men
tSensors
Actuators
EpisodicCompositional
Memory
Percepts
Actions
PS Agent
Decision-making
input (percept)
→ deliberation
→ output (action)
Episodic & compositional memory:experience stored as clips
PS agents: deliberation process basedon a random walk in the clip space
C1 C2
C3 C4
p21
p12
p13 p31
p34
p43
p42p24
p11 p22
p33 p44
p14
p41
p23
p32
C1
Represented by Markov chain withtransition matrix P = [pij ]
Different types of deliberation processes
e.g., standard PS & reflecting PS
1 Briegel, De las Cuevas, Sci. Rep. 2, 400 (2012) [arXiv:1104.3787].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
Variants of PS: Standard & Reflecting PS (RPS)
Standard PS
One clip network ⇔ Markov chain
Percept associated to clip i registered:
random walk starting from clip i
until action is obtained → output
Quantization
clips: state vectors |0 〉, |1 〉, |2 〉, . . .
associate unitary Ui to each clip, s.t.,
Ui |0 〉 =∑j
√pji | j 〉
measure in clip-basis, result: |k 〉if k is action → output
if not, apply Uk to |0 〉, repeat
Reflecting PS2
Desire output according to distribution πspecific to each percept
Separate clip network for every percept
Focus on one percept with transition
matrix P , s.t., Pπ = π
Quantization
two registers I/II: {| i 〉}I/IIuse Ui to construct operators UP , VP :
UP | i 〉I |0 〉II = | i 〉I Ui |0 〉IIVP |0 〉I | i 〉II = Ui |0 〉I | i 〉II
Encode π: |π′ 〉=∑i
√πi | i 〉I Ui |0 〉II
Szegedy-walk operator3 W (P ):
W (P ) |π′ 〉 = |π′ 〉2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].3 M. Szegedy, in Foundations of Computer Science, Proc. 45th IEEE Symp. Found. Comp. Sc., 32–41 (2004).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
Achieved by Grover-like procedure!2
Recall Grover’s algorithm4
Search a set S for marked itemsfrom a subset M⊂ S
(0) Prepare |ψ 〉: uniformsuperposition of basis statesrepresenting all items
(1) Reflection over marked items |φ 〉
(2) Reflection over |ψ 〉
Repeat steps (1) and (2)
|ϕ ⟩
|ψ ⟩
Note: every item found equally likely2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].4 Grover, Proc. 28th ACM Symp. Theory Comput. (STOC), 212–219 (1996) [arXiv:quant-ph/9605043].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
I
Iref HA L
Iref HBL
I
I
UP†
D0,III
UP
I
I
VP†
D0,I
IVP
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
H
H
H
W W2n
H
H
H
I
II
Aux n
Aux 1
Aux 0
W2
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
H
H
H
W W2n
H
H
H
I
II
Aux n
Aux 1
Aux 0
W2
PDHWL
D0,Aux
PDHWL†
Aux
I
II
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
H
H
H
W W2n
H
H
H
I
II
Aux n
Aux 1
Aux 0
W2
PDHWL
D0,Aux
PDHWL†
Aux
I
II
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
H
H
H
W W2n
H
H
H
I
II
Aux n
Aux 1
Aux 0
W2
PDHWL
D0,Aux
PDHWL†
Aux
I
II
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Projective Simulation and its variantsQuantum-enhanced deliberation
The RPS Decision-Making Process
RPS agent: output actions according to tail of stationary distribution π
RPS: Grover-like procedure
(0) Prepare |π′ 〉: reprentation ofstationary distribution
(1) Reflection over actions
(2) Approximate5 reflection over |π′ 〉
Repeat steps (1) and (2)
Approximate reflection:Ui → UP , VP→W (P )→ PD(W )→ ARO
H
H
H
W W2n
H
H
H
I
II
Aux n
Aux 1
Aux 0
W2
PDHWL
D0,Aux
PDHWL†
Aux
I
II
Sample, and repeat if no action is found.
Quantum RPS quadratically faster than classical RPS! Speed-up!2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].5 Magniez, Nayak, Roland, Santha, SIAM J. Comput. 40, 142 (2011) [arXiv:quant-ph/0608026].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
I
II
III
II II
III III
UHΘ1L
U HΘ2,Θ4,Θ5L U HΘ3,Θ6,Θ7L
UHΘ2L
UHΘ4L UHΘ5L
UHΘ3L
UHΘ6L UHΘ7L
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Flexible Implementation — Coherent Controlization
Key element: flexible (updateable) implementation without prior knowledge of π
First step: construction of unitaries Ui: first column: real, positive entries√pji
For two clips: U(θ) = exp(−i θ
2Y)=
(cos θ
2− sin θ
2
sin θ2
cos θ2
)Extend by nested scheme of adding control7 (see also [8, 9, 10]), e.g., for (up to) 8 clips:
I
II
III
II II
III III
UHΘ1L
U HΘ2,Θ4,Θ5L U HΘ3,Θ6,Θ7L
UHΘ2L
UHΘ4L UHΘ5L
UHΘ3L
UHΘ6L UHΘ7L
Remaining algorithm: some fixed operations + adding control: non-trivial, but possible10
7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].8 Araujo, Feix, Costa, Brukner, New J. Phys. 16, 093026 (2014) [arXiv:1309.7976].9 Thompson, Gu, Modi, Vedral, arXiv:1310.2927 [quant-ph] (2013).10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
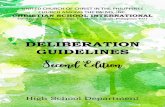
Ion Trap Setups
(a) (b) (c)
String of, e.g., 40Ca+ ions in quadrupole trap — Paul trap
• Electric fields applied by blades (rapidly oscillating) & tips (static)
⇒ nearly harmonic 3−d trapping potential
• Ions individually addressable via position/frequency (dep. on setup)
• Coulomb coupling ⇒ bus (e.g., via vibrational modes)
(a) Figure from: Blatt & Wineland, Entangled states of trapped atomic ions, Nature 453, 1008–1015 (2008).
(b) Paul trap currently used by Blatt group (Innsbruck), image courtesy of B. Lanyon.
(c) Paul trap used in Wunderlich group (Siegen).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Ion Trap Setups
(a) (b) (c)
String of, e.g., 40Ca+ ions in quadrupole trap — Paul trap
• Electric fields applied by blades (rapidly oscillating) & tips (static)
⇒ nearly harmonic 3−d trapping potential
• Ions individually addressable via position/frequency (dep. on setup)
• Coulomb coupling ⇒ bus (e.g., via vibrational modes)
(a) Figure from: Blatt & Wineland, Entangled states of trapped atomic ions, Nature 453, 1008–1015 (2008).
(b) Paul trap currently used by Blatt group (Innsbruck), image courtesy of B. Lanyon.
(c) Paul trap used in Wunderlich group (Siegen).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Ion Trap Setups
(a) (b) (c)
String of, e.g., 40Ca+ ions in quadrupole trap — Paul trap
• Electric fields applied by blades (rapidly oscillating) & tips (static)
⇒ nearly harmonic 3−d trapping potential
• Ions individually addressable via position/frequency (dep. on setup)
• Coulomb coupling ⇒ bus (e.g., via vibrational modes)
(a) Figure from: Blatt & Wineland, Entangled states of trapped atomic ions, Nature 453, 1008–1015 (2008).
(b) Paul trap currently used by Blatt group (Innsbruck), image courtesy of B. Lanyon.
(c) Paul trap used in Wunderlich group (Siegen).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Ion Trap Setups
(a) (b) (c)
String of, e.g., 40Ca+ ions in quadrupole trap — Paul trap
• Electric fields applied by blades (rapidly oscillating) & tips (static)
⇒ nearly harmonic 3−d trapping potential
• Ions individually addressable via position/frequency (dep. on setup)
• Coulomb coupling ⇒ bus (e.g., via vibrational modes)
(a) Figure from: Blatt & Wineland, Entangled states of trapped atomic ions, Nature 453, 1008–1015 (2008).
(b) Paul trap currently used by Blatt group (Innsbruck), image courtesy of B. Lanyon.
(c) Paul trap used in Wunderlich group (Siegen).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Ion Trap Setups
(a) (b) (c)
String of, e.g., 40Ca+ ions in quadrupole trap — Paul trap
• Electric fields applied by blades (rapidly oscillating) & tips (static)
⇒ nearly harmonic 3−d trapping potential
• Ions individually addressable via position/frequency (dep. on setup)
• Coulomb coupling ⇒ bus (e.g., via vibrational modes)
(a) Figure from: Blatt & Wineland, Entangled states of trapped atomic ions, Nature 453, 1008–1015 (2008).
(b) Paul trap currently used by Blatt group (Innsbruck), image courtesy of B. Lanyon.
(c) Paul trap used in Wunderlich group (Siegen).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
Initial state:(α |g 〉1 + β |e 〉1
)|ψ 〉2 vibrational mode in |0 〉
(i) Cirac-Zoller method11: laser pulse on ion 1: |g 〉1 |0 〉 → | e 〉1 |1 〉
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\Èg'\È0\Èe'\È0\
U
H1
H2
Sg
Se
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
(α |g 〉1 + β |e 〉1
)|ψ 〉2 |0 〉 → |e 〉1 |ψ 〉2
(α |1 〉+ β |0 〉
)(i) Cirac-Zoller method11: laser pulse on ion 1: |g 〉1 |0 〉 → | e 〉1 |1 〉
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
|e 〉1 |ψ 〉2(α |1 〉+ β |0 〉
)→ |e 〉1
(α |ψ′ 〉2 + β |ψ 〉2
)|0 〉
(ii) Hiding pulses: laser pulses on ion 2: |g 〉2 |1 〉 → |g′ 〉2 |0 〉
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\ Èg'\2È0\Èe'\2È0\
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
|e 〉1(α |ψ′ 〉2 + β |ψ 〉2
)|0 〉 → |e 〉1
(α|ψ′ 〉2 +β U |ψ 〉2
)|0 〉
(iii) Unknown unitary U : laser pulse on ion 2: |ψ 〉2 → U |ψ 〉2
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\ Èg'\2È0\Èe'\2È0\
U
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
|e 〉1(α|ψ′ 〉2 +β U |ψ 〉2
)|0 〉 → |e 〉1
(α|ψ 〉2 |1 〉+β U |ψ 〉2 |0 〉
)(iv) Undo hiding pulses: laser pulses on ion 2: |g′ 〉2 |0 〉 → |g 〉2 |1 〉
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\ Èg'\2È0\Èe'\2È0\
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Scheme to Add Control to Unknown Unitaries7
|e 〉1(α |ψ 〉2 |1 〉+β U |ψ 〉2 |0 〉
)→
(α |g 〉1 |ψ 〉2+β |e 〉1 U |ψ 〉2
)|0 〉
(v) Switch back control: Cirac-Zoller pulse11 on ion 1: | e 〉1 |1 〉 → |g 〉1 |0 〉
Ion 1
Èg\1È0\
Èe\1È0\
Èg\1È1\
Èe\1È1\
Ion 2
Èg\2È0\
Èe\2È0\
Èg\2È1\
Èe\2È1\
10 Friis, Dunjko, Dur, Briegel, Phys. Rev. A 89, 030303(R) (2014) [arXiv:1401.8128].11 Cirac, Zoller, Phys. Rev. Lett. 74, 4091 (1995).
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Summary & Conclusion
• (R)PS: decision-making processes for autonmous learning agents
• Speed-up: Quantum RPS decides quadratically faster than classical RPS2
• Flexible (learning! growth!) implementation using coherent controlization7
• All elements of algorithm implementable in ion traps7
• Feasible implementation: detailed simulations including errors for simplescenario7
Π
8
Π
4
3 Π
8
Π
2
Σ0.0
0.1
0.2
0.3
0.4
DH�,N�
L
2 Paparo, Dunjko, Makmal, Martın-Delgado, Briegel, Phys. Rev. X 4, 031002 (2014) [arXiv:1401.4997].7 Dunjko, Friis, Briegel, New J. Phys. (accepted, 2015) [arXiv:1407.2830].
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents

Projective SimulationIon Implementation
Coherent Controlization using Trapped Ions
Thank you for your attention.
Nicolai Friis (ITP Innsbruck) Quantum-enhanced deliberation of learning agents