
Propulsion Control Part 1 of 2
40
1 Propulsion Control Part 1 of 2 Øyvind Smogeli and Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10, NO-7491 Trondheim, Norway E-mail: [email protected] [email protected]
-
Upload
harrison-bradley -
Category
Documents
-
view
54 -
download
3
description
Propulsion Control Part 1 of 2. Øyvind Smogeli and Asgeir J. Sørensen, Department of Marine Technology, Norwegian University of Science and Technology, Otto Nielsens Vei 10, NO-7491 Trondheim, Norway E-mail: [email protected] [email protected]. Outline. Part 1: Modelling - PowerPoint PPT Presentation
Transcript of Propulsion Control Part 1 of 2

1
Propulsion Control
Part 1 of 2
Øyvind Smogeli and Asgeir J. Sørensen,
Department of Marine Technology, Norwegian University of Science and Technology,Otto Nielsens Vei 10, NO-7491 Trondheim, Norway
E-mail: [email protected]@ntnu.no

2
OutlinePart 1: Modelling• Motivation and problem formulation• Mathematical modelling• Propeller characteristics• Propeller losses and dynamics• Experimental results
Part 2: Local control• Conventional local thruster control• Combined power and torque control• Sensitivity to thrust losses• Propeller load torque observer• Torque loss calculation• Anti-spin control• Simulation results• Experimental results

3
• Thrust and power allocation (over/under actuated systems)
• Pitch/rpm/torque/ power control
• Combined torque and power control
• Anti-spin thruster control
• Combined rudder and propeller control
POWER
PITCH or RPM CONTROL
VARIABLETORQUE
CONSTANTTORQUE
TORQUE CONTROL
POWER
Propulsion and Thruster Control

4
Dynamic Positioning and Transit
• Demand for vessels to conduct all-year operation in harsh environment and extreme conditions
• High positioning accuracy required
• DP system and propulsion system must be robust to any single failure
• It’s a trend towards physical and functional integration between the power and automation systems

5
Motivation

6
Thrusters affected by waves, current and vessel motion:
– Rapidly changing operating conditions
– Load fluctuations
Motivation

7
Thrusters affected by waves, current and vessel motion:
– Rapidly changing operating conditions
– Load fluctuations
Effects of bad low-level thruster control:
– Danger of blackout
– Wear and tear of the propulsion system
– Increased fuel consumption
– Reduced thrust capability
Motivation
8
Propeller Types: FPP and CPP
Two controllable parameters: Shaft speed and pitch– Shaft speed: Fixed pitch propellers (FPP)
• No hydraulics needed to control the pitch• Preferable for electric motors with variable speed• Optimized for one advance speed
– Pitch: Controllable pitch propellers (CPP)• Used for direct-driven shafts when varying thrust is
needed• Fast response, produces thrust in two directions• Better hydrodynamics for varying advance speed
– Consolidated control: Combination also possible (CPP)• Typically two or three speed setpoints• Varying pitch dynamically
Pitch P measured at 0.7R, commonly given as pitch/diameter ratio P/D
Shaft speed given as RPM, n = RPS = RPM/60 or ω = 2n

9
Conventional Propulsion Control
RPM INPUT
POWER
RPM
PITCH INPUT
FPP:Fixed Pitch Propeller with controllable speed (RPM)
CPP:Controllable Pitch Propeller withfixed speed
POWER
PITCH

10
Propulsion
Courtesy to Rolls-Royce Marine: http://www.rolls-royce.com/marine/default.jsp

11
Electric Motor
Ventilation Unit
Bearing
Slipring Unit (Power/Data Transmission)
Air Cooling
Bearing, Shaft Seals
FP Propeller Shaft Line
Installation Block
Hydraulic Steering Unit
Propulsion
Courtesy to ABB Marine: http://www.abb.com/

12
Functionality: Control Modes• Station keeping models• Marine operation models• Slender structures• Multibody operations
0 1 2 3 4 5 6 7 ….. Speed [knots]
Station keeping
Marked position
Low speed tracking
High speed tracking/Transit
• Manoeuvring models • Linearized about some Uo
• Sea keeping • Motion damping

13
Control Modes: - Speed range and actuation
Control actuation: • Main propellers/pods • Tunnel thrusters• Azimuthing thrusters
0 1 2 3 4 5 6 7 …..Speed [knots]
Station keeping
Marked position
Low speed tracking
High speed tracking/Transit
Control actuation: • Main propellers/pods • Rudders
14
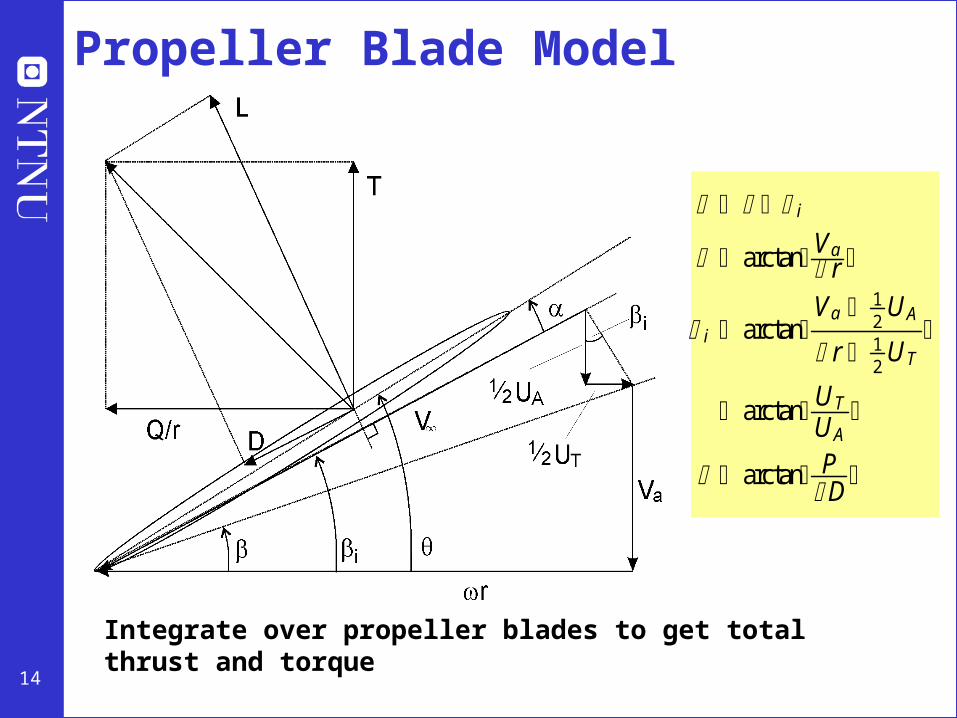
Propeller Blade Model
Integrate over propeller blades to get total thrust and torque
i
arctanVa r
i arctanVa 1
2UA
r 12UT
arctanUT
UA
arctan PD

15
Propeller Characteristics
is the density of wateris the propeller diameteris the propeller speed (RPS)
The non-dimensional thrust and torque coefficients are given as:
Typical characteristics of actual propeller thrust and torque :
wDn
is the advance speed
P/D is the pitch ratio
Ae/AO
is the propeller expanded blade area ratioZ
is the number of blades
Rn is the Reynolds number
t is the max. blade thickness
c is the propeller chord length
VaKT f1Va ,n,D,P/D,Ae/A0 ,Z,Rn , t/c
KQ f2Va ,n,D,P/D,Ae/A0 ,Z,Rn , t/c
Ta wD4KT|n|n
Qa wD5KQ |n|n

16
Desired Thrust and Moment for Speed Controlled Propellers
The desired/reference thrust and torque coefficients for zero advance speed, KT0 and KQ0, are used for control since Va is unknown to the control system:
Tref kuref wD4KT0 |nref |nref
Qref wD5KQ0 |nref |nref
nref is the desired propeller speed (RPS)

17
Open Water Tests as Function of Advance Ratio
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
Advance ratio
o
KT
10KQ
P/D 0.7, 0.89 and1.1
Rn =2 6106, Z=4, D =3.1 m, and AE/Ao =0.52
J Va
nD
Open water propeller efficiency in undisturbed water:
Work done by propeller in producing a thrust/work required to overcome shaft torque
o TaVa
2 nQa J
2KT
KQ

18
Linear Thruster Characteristics
KT 0 1J,
KQ 0 1J.
KT0 KTVa 0 KTJ 0 0
KQ0 KQVa 0 KQJ 0 0
Common simplification:
The thrust and torque are then expressed as:
The nominal thrust and torque coefficients, used for control since Va is unknown to the control system (simplest possible representation):
J Va
nD
Advance ratio:
Ta wn|n|D4 0 1Va
nD wD4 0n|n| D3 1|n|Va Tnnn|n| Tnv |n|Va
Qa wn|n|D5 0 1Va
nD wD5 0n|n| D4 1|n|Va Qnnn|n| Qnv |n|Va

19
4 Quadrant Thrust Model
1st quadrant: Va 0,n 0
2nd quadrant: Va 0,n 0
3rd quadrant: Va 0,n 0
4th quadrant: Va 0,n 0
Fixed pitch propeller in the Wageningen series:
CT Ta
12 Va
2 0. 7 nD2 4D2
CQ Qa
12 Va
2 0. 7 nD2 4D3

20
Controllable Pitch PropellerFor a given pitch, the propeller
behaves like a fixed pitch propeller:
A “cut” along one P/D value gives the conventional KT curve as function of advance ratio.

21
Propulsion Efficiency (1)Axial water inflow velocity to the propeller Va due to vessel velocity U and wake fraction number w is:
The hull reduces the inflow to the propeller 0 < w < 0.4
Va U1 ww wp wv U1 w
is the wake fraction caused by the wave motion of the water particles
ww
is the wake fraction caused by so-called potential effects for a hull advancing forward in an ideal fluid,
is the wake fraction caused by viscous effects due to the effect of boundary layers
wp
wv

22
In steady state the effective thrust is equal to the total resistance R:
Overall propulsion efficiency is given by the ratio of useful work done by the product of drag and ship speed divided by the required work to overcome the shaft torque:
Propeller suction on the aft ship given by the thrust-deduction coefficient 0 < td < 0.2 increase resistance (drag)R Ta1 td ds Tatd
r B o
J
2KTKQB
o
KQ
KQB
p RU2 nQa
h o r m
h 1 td1w
where
Propulsion Efficiency (2)
Relative rotational efficiency
Hull efficiency in the range of 1-1.2
m Mechanical efficiency in the range of 0.8-0.9
Open water propeller efficiency in undisturbed water o TaVa
2 nQa J
2KT
KQ

23
Propeller and Thruster Losses
• The vessel hull– Coanda effect– Tunnel thruster suction
losses– Thrust deduction
• Velocity fluctuations– In-line change of advance
velocity– Cross-coupling drag
• Thruster-thruster interaction• Ventilation and in-and-out-of
water effects
The actual thrust Ta and torque Qa are affected by:

24
Thrust Losses: General formulation
xp
p
The actual thrust Ta and torque Qa may be expressed as:
where:
represents dynamic states (vessel motion, propeller submergence, environmental conditions).
represents propeller dependent parameters.
hT and hQ are termed the thrust and torque reduction functions
Ta hTn,xp , p1 tdTref fTn,xp , p,
Qa hQn,xp , pQref fQn,xp , p,
#
#
Thrust and torque loss factors:Ta
Tref hTn,xp , p1 td T KT
KT0
Qa.
Qref hQn,xp , p Q
KQ
KQ0

25
Example: Thrust curves for varying KT
-200
0
200
400
800
Thrust Tth [kN]
-3 -2 -1 1 2 3 4 5
Speed n [RPS]
KT = 0.4
KT = 0.36
KT = 0.30

26
Thrust Losses: Velocity fluctuations
Axial in-line fluctuations:
Variation in Va
and hence thrust coefficient
Transverse fluctuations:
Cross-coupling drag

27
Thrust Losses: - Thruster-thruster interaction
Loss of thrust because of:
V j
Va
Vt
Va V j,a+
V t+ V j,t
• Change of advance velocity due to inline jet velocity component Vj,a, which leads to change in the thrust coefficient
• Cross-coupling drag due to transverse jet velocity component Vj,t
• Other interaction effects, harder to model

28
Thrust Losses: Coanda effect• Propeller slipstream is drawn towards the hull and
deflected• Severe loss of thrust for unfortunate thrust angles
F Va
Low-p ressurereg ion

29
Propeller:• D = 250 mm• Z = 4• P/D = 1• EAR = 0.55
Duct:• L/D = 0.5• L = 118.8 mm
• Di = 252.1 mm
• Ducted propeller• Varying shaft
speed / loading and submergence
• Measuring thrust and torque
• Steady state
Cavitation Tunnel Experiments: - Ventilated ducted propeller

30
Experiments: - Cavitation tunnel results
Thrust for Ja = 0.2
Ventilation

31
Experiments: - Cavitation tunnel results
Thrust for Ja = 0.2
Ventilation

32
Experiments: MCLab• Same ducted propeller as in the cavitation tunnel• Operating in waves with ventilation• Varying submergence and propeller speed

33
Experimental Results MCLab

34
Experimental Results MCLab: Waves

35
Experiments: MCLab time series
Thrust for increasing shaftspeed in h/R = 1.5
Loss of thrust duringventilation

36
Modelling of Ventilation Loss Effects
•Ventilation loss model for simulation
•Experimental results from cavitation tunnel at NTNU

37
Propeller Shaft Model
2n
torque generated by the motor
actual torque experienced by the propeller
QmQa
Is moment of inertia of the propeller shaft
angular shaft speed
Is Qm Qa K
Km friction coefficient
Power delivered by the motor:
Actual propeller shaft power accounting for the effect of thrust losses:
Pm Qm 2 nQm
Pa Qa 2 nQa

38
Torque Loop in Electrical Motor Drive
MotorModel
PWM
Qc
n
-Qcalc
Isb
~~
InductionMotor
Flux controller Isa
Torquecontroller
-
c
calc
Tacho Tm
Flux weakening
PWMConverter
The closed loop of thrust motor and torque controller is assumed to be equivalent with a 1st order model:
where 20 < Tm < 200 milliseconds
Qm 1Tm
Qc Qm

39
Thruster Modelling for Control: A summaryThruster dynamics:
first order motor model
rotational dynamics with friction
propeller load torque
propeller thrust
Desired thrust and torque:
Thrust and torque loss factors:
propeller power
Is Qm Qa K
Qm 1Tm
Qc Qm
Qa wD5KQ |n|n
Ta wD4KT|n|n
Pa Qa 2 nQa
Tref kuref wD4KT0 |nref |nref ,
Qref wD5KQ0 |nref |nref ,
#
#
Ta
Tref hTn,xp , p1 td T KT
KT0
Qa.
Qref hQn,xp , p Q
KQ
KQ0

40
Propeller Block Diagram
( )
( ).
.MotorDynamics
Control
.
T
ShaftDynamics
Thrusterunit


















