PropaGator Oral Report 2 Andrew Wegener IMDL 2012.
7
PropaGator Oral Report 2 Andrew Wegener IMDL 2012
-
Upload
frederica-wood -
Category
Documents
-
view
217 -
download
0
Transcript of PropaGator Oral Report 2 Andrew Wegener IMDL 2012.

PropaGator
Oral Report 2Andrew Wegener
IMDL 2012

Contents
•Objective•Current Status•Special Sensor•Questions

Objective• PropaGator is an
intelligent autonomous surface vehicle (ASV) designed to clean up the pollution in our oceans.
• PropaGator navigates to GPS waypoints that are known to have lots of pollution between them and nets are used to remove the pollutants from the ocean.
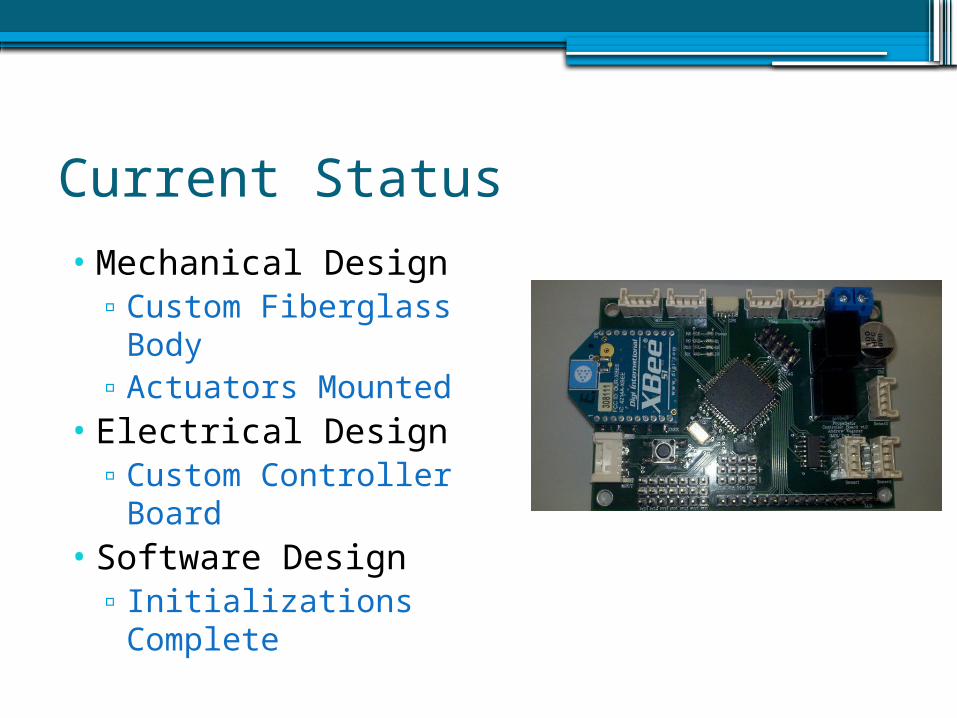
Current Status• Mechanical Design
▫Custom Fiberglass Body
▫Actuators Mounted • Electrical Design
▫Custom Controller Board
• Software Design▫Initializations Complete

Special Sensor
•GPS Waypoint Navigation▫Parse GPS Data(NMEA standard)▫Convert Data to UTM▫Rotate UTM coordinates
Y is north, X is east
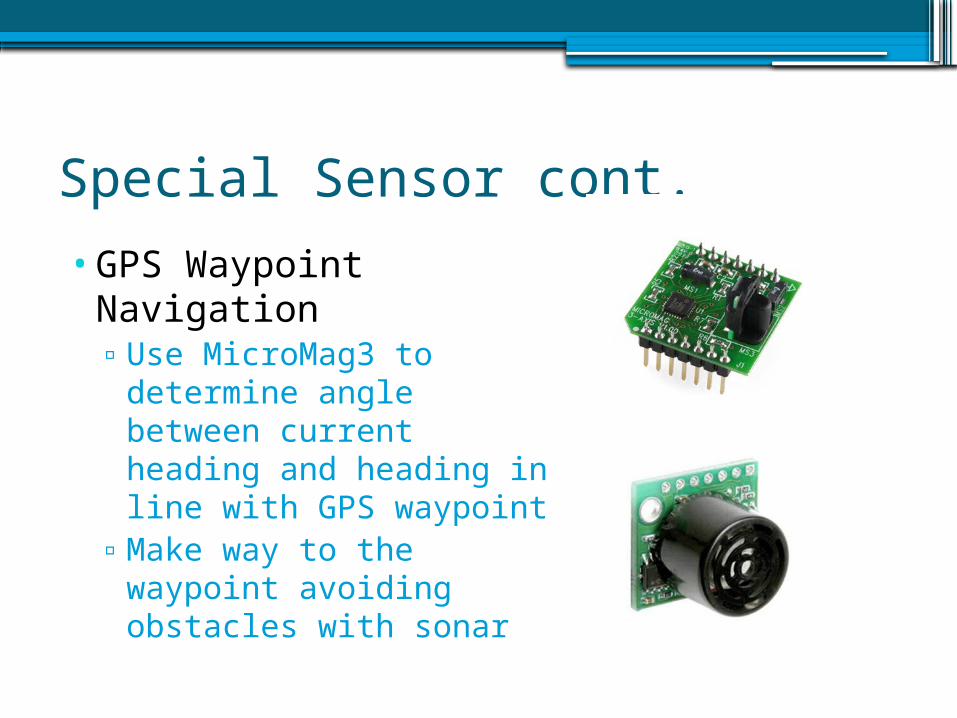
Special Sensor cont.
•GPS Waypoint Navigation▫Use MicroMag3 to
determine angle between current heading and heading in line with GPS waypoint
▫Make way to the waypoint avoiding obstacles with sonar

Questions