
Projective Geometry- 3D Points, planes, lines and quadrics.
61
Projective Geometry- 3D Points, planes, lines and quadrics
-
Upload
erica-lewis -
Category
Documents
-
view
225 -
download
3
Transcript of Projective Geometry- 3D Points, planes, lines and quadrics.
Projective Geometry- 3D
Points, planes,
lines and quadrics

Points in Homogeneous coordinates
• X in 3-space is a 4-vector
X= (x1, x2, x3, x4) T with x4 not 0
represents the point ( x, y, z)T
where x = x1/ x4 , y = x1/ x4 z= x1/ x4
For example X = ( x, y, z, 1)

Projective transformation in p3
• A projective transformation H acting on p3 is a linear transformation on homogeneous 4-vectors and is a non-singular 4x4 matrix:
• X’ =HX It has 15 dof
• 2.2.1 Planes with 4 coefficients:• =( 1234•

Planes
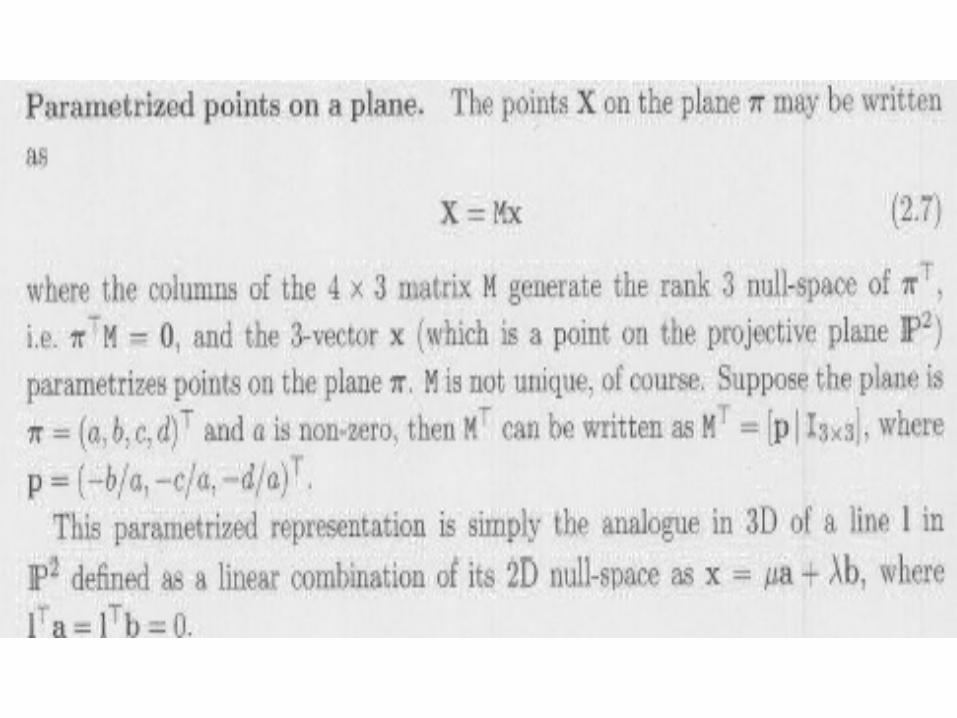
• The plane: A plane in 3-space may be written as • x1 + x2 + x3 + x4 = 0
• T X = 0 • In inhomogeneous coordinates in 3-vector
notation
• Where n =( 123x4 =1• d= 4 ,d /||n|| is the distance of the origin.
T),,(X here w0 d X n. zyx

Joins and incidence relation
(1)A plane is uniquely define by three points, or the join of a line and a point in general position.
(2) Two planes meet at a line, three planes meet at a point
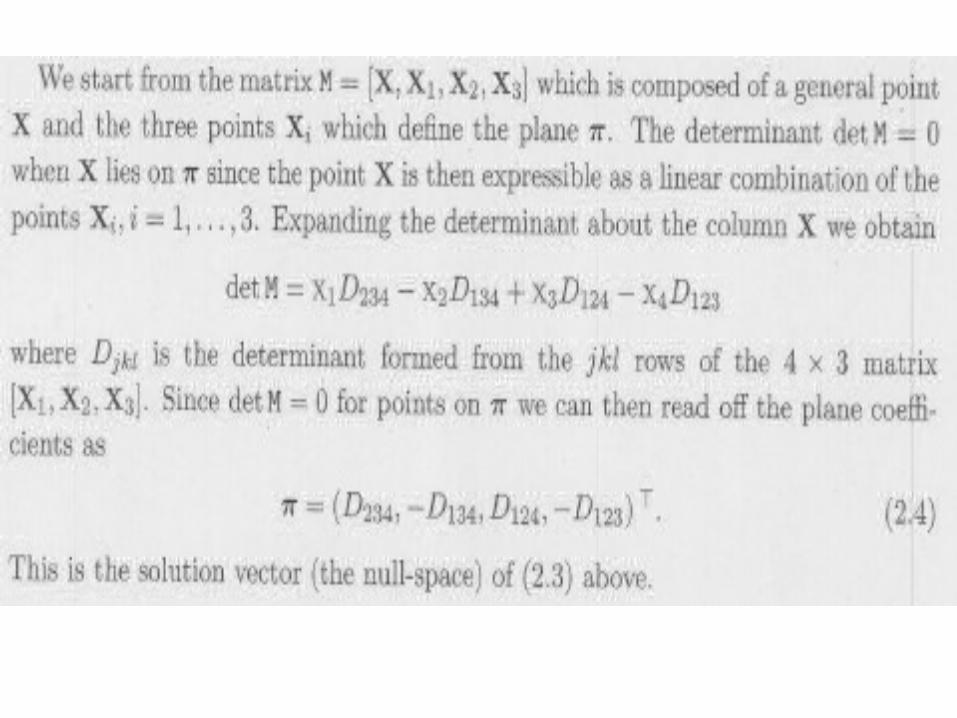


Three planes define a point

Lines in 3 space
• A line is defined by the join of two points or the intersection of two planes. A line has 4 dof in 3 space. It is a 5 –vector in homogenous coordinates, and is awkward.
Null space and point representation
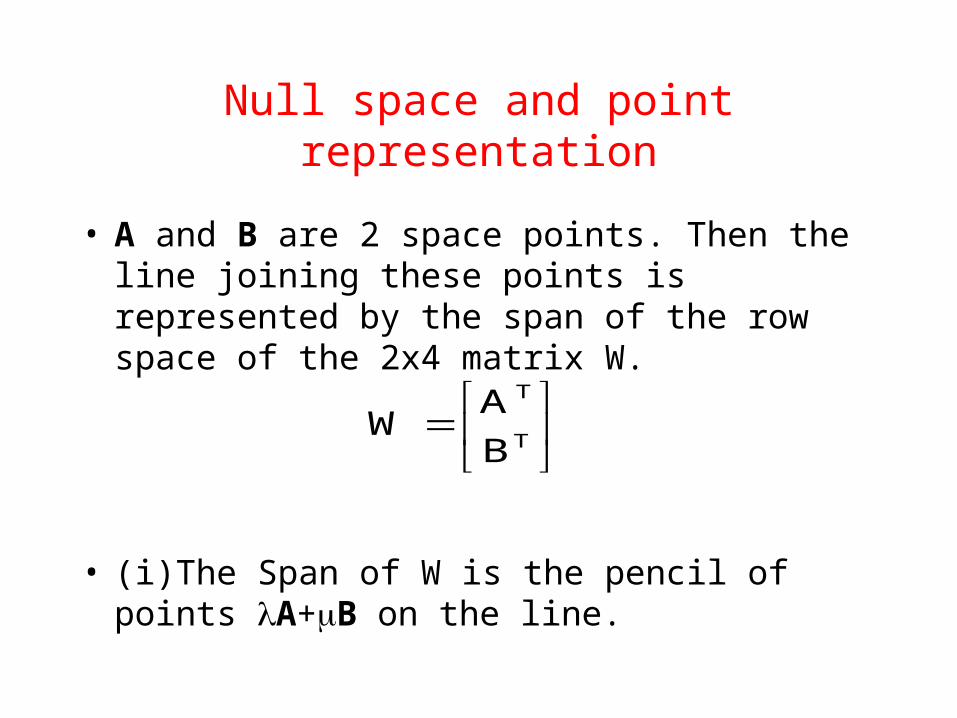
• A and B are 2 space points. Then the line joining these points is represented by the span of the row space of the 2x4 matrix W.
• (i)The Span of W is the pencil of points A+B on the line.
T
T
B
AW
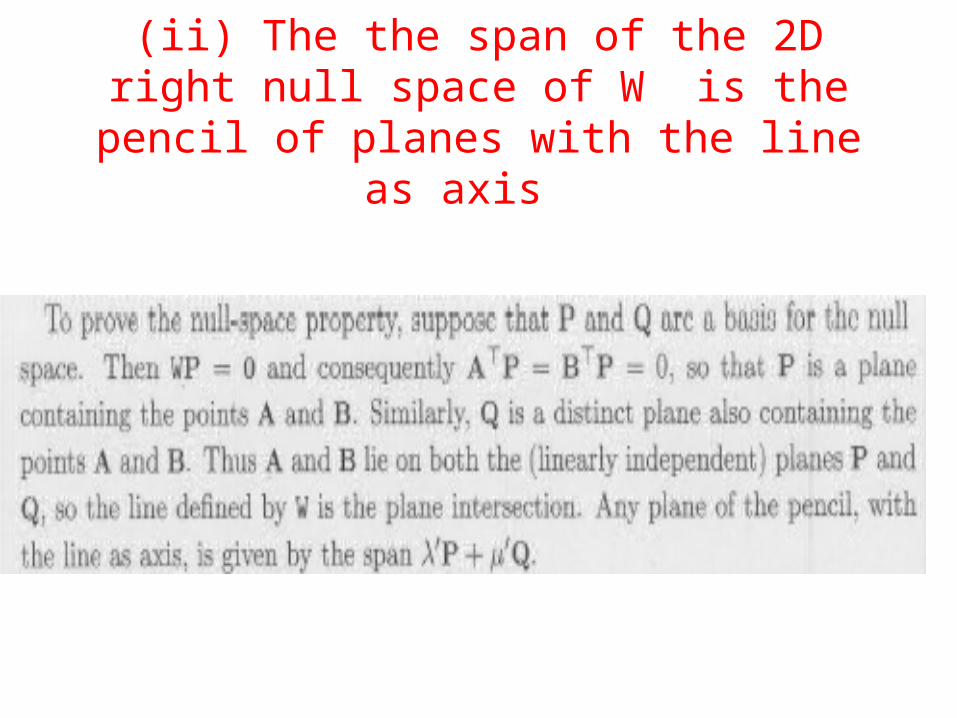
(ii) The the span of the 2D right null space of W is the pencil of planes with the line as axis

The dual representation of a line as the intersection of two planes P and Q

Examples
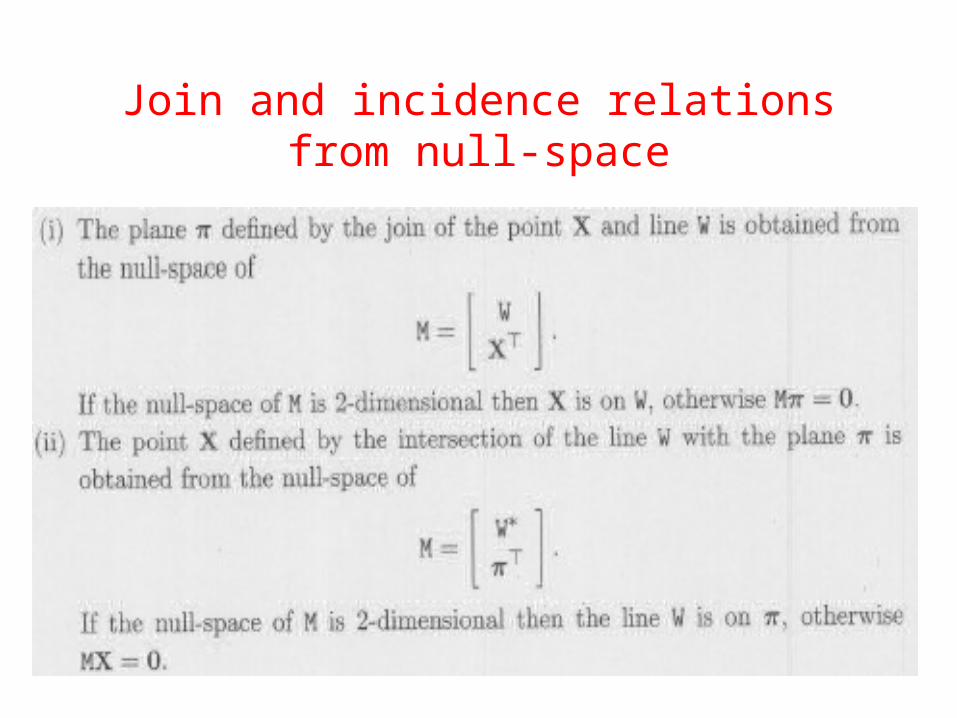
Join and incidence relations from null-space

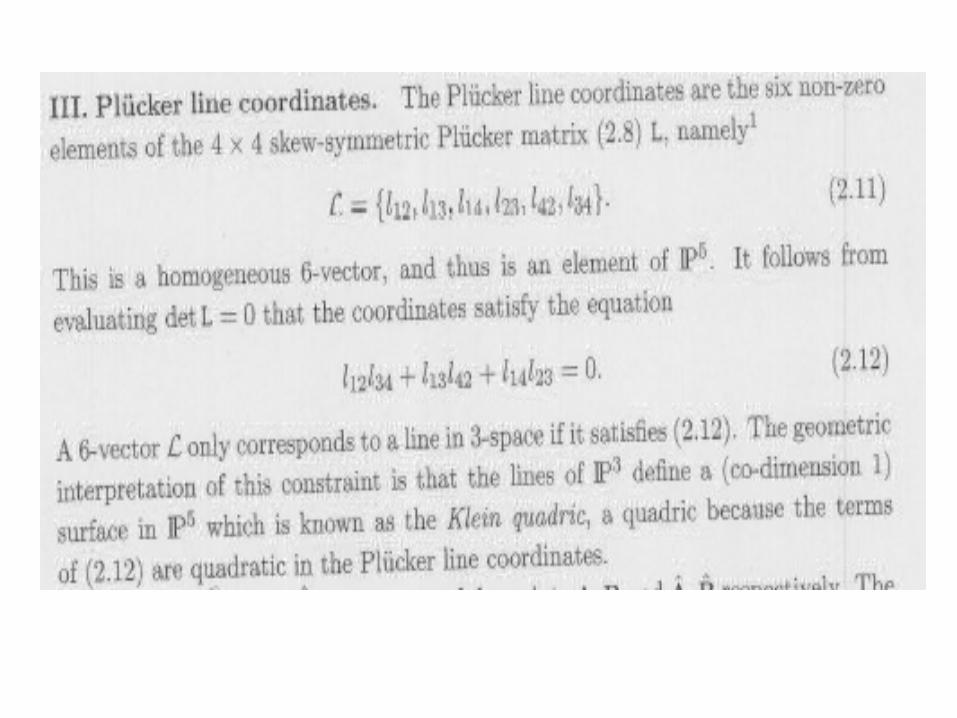
Plucker matrices

Properties of L

Properties of L 2

Examples(Plucker matrices)where the point A and B are the origin and the
ideal point in x direction

A dual Plucker representation L*

Join and incidence properties
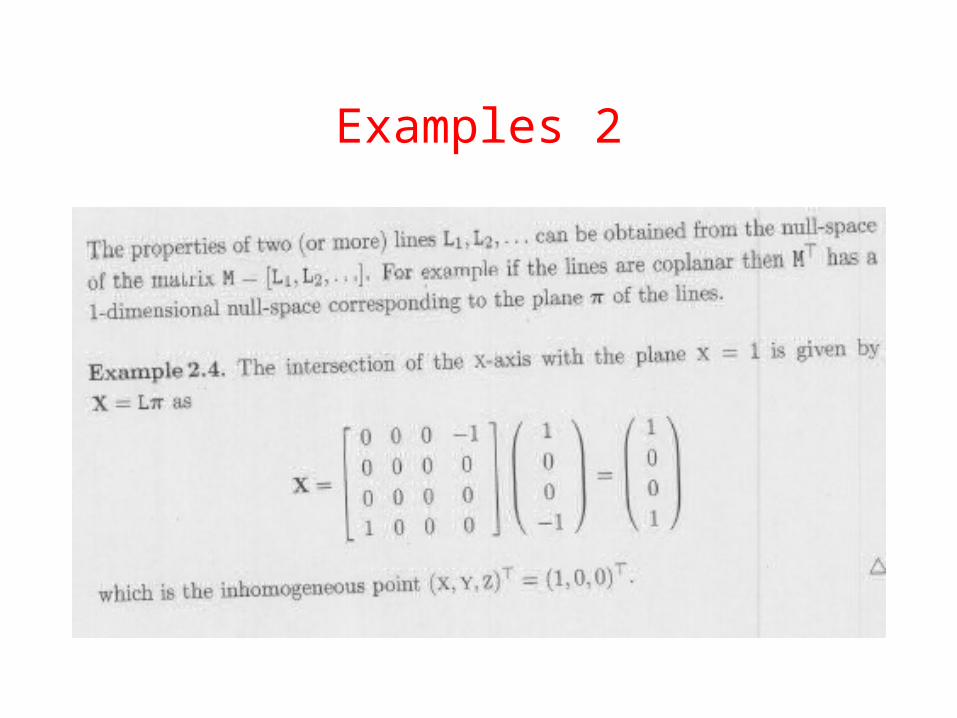
Examples 2
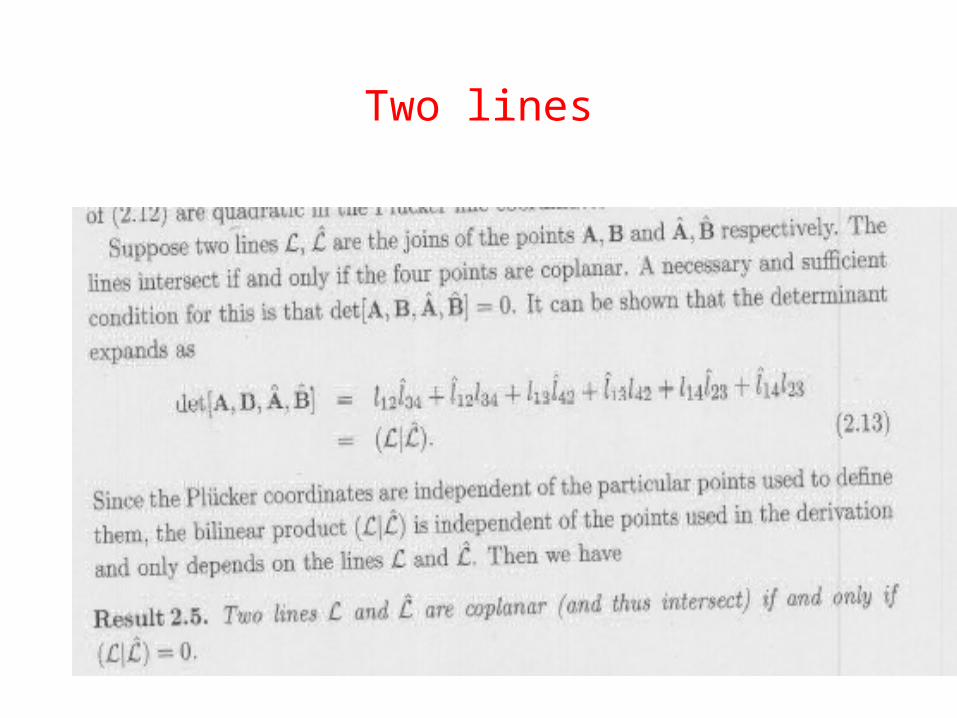
Two lines

The bilinear product (L !L^)
Quadrics and dual quadrics
• A quadric Q is a surface in p3 defined by the equation
• XT Q X = 0• Q is a 4 x 4 matrix
• (i) A quadric has 9 degree of freedom. These corresponds to 10 independent elements of a 4x4 symmetric matrix less one for scale. Nine points in general position define a quadric
Properties of Q• (ii) If the matrix Q is singular, the quadric
degenerates
• (iii) A quadric defines a polarity between a point and plane. The plane
= QX
is the polar plane of X w.r.t. Q
• (iv) The intersection of a plane with a quadric Q is a conic C
Dual quadric
• (v) Under the point transformation X’ =HX, a point quadric transforms as
• Q’ = H-T Q H
• The dual of a quadric is a quadric on planesQ*=0 where Q* = adjoint Q or Q-1 if Q is invertible
A dual quadirc transform as Q*’ = H-T Q* HT

Classification of quadrics
• Decomposition Q = UT D U• Where U is a real orthogonal matrix and D is a
real diagonal matrix.
• By scaling the rows of U, one may write Q=HTDH where D is a diagonal with entries 0,1, or –1.
• H is equivalent to a projective transform. Then up to a projective equivalence, the quadric is represented by D

Classification of quadrics 2
• Signature of D denoted by (D) = Number of 1 entries minus number of –1 entries
• A quadric with diag(d1,, d2,, d3,, d4 ,) corresponds to a set of point given by
d1x2 + d2y2 + d3z2 + d4T2 =0
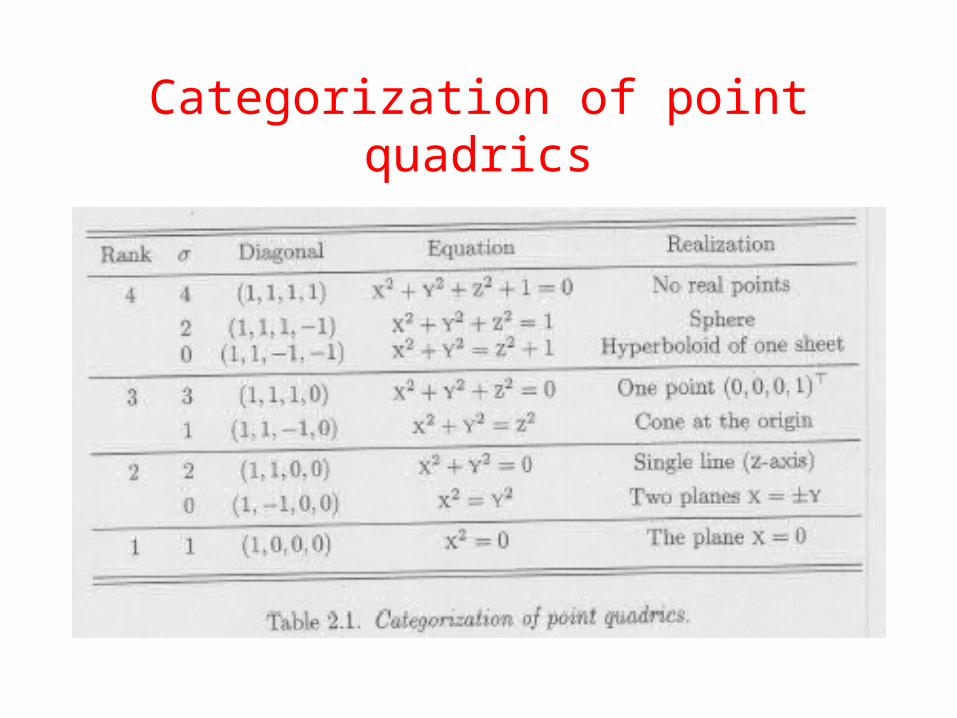
Categorization of point quadrics

Some examples of quadrics
• The sphere, ellipsoid, hyperboloid of two sheets and paraboloid are allprojectively equivalent.
• The two examples of ruled quadrics are also projectively equivalent. Their equations are
• x2 + y2 = z2 + 1• xy = z

Non-ruled quadrics: a sphere and an ellipsoid

Non ruled quadrics: a hyperboloid of two sheets and a paraboloid

Ruled quadrics: Two examples of hyperboloid of one sheet are given. A surface is made up
of two sets of disjoint straight lines
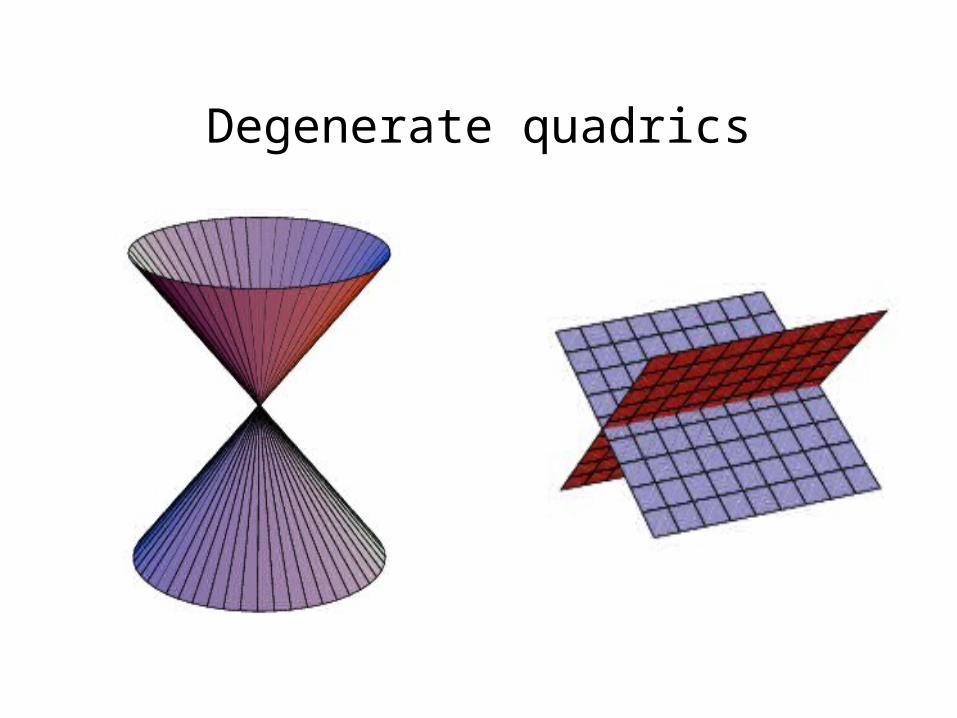
Degenerate quadrics

The twisted cubic is a 3D analogue of a 2D conic

Various views of the twisted cubic(t3, t2, t)T

The screw decomposition
• Any particular translation and rotation is equivalent to a rotation about a screw axis together with a translation along the screw axis. The screw axis is parallel to the original rotation axis.
• In the case of a translation and an orthogonal rotation axis ( termed planar motion), the motion is equivalent to a rotation about the screw axis.
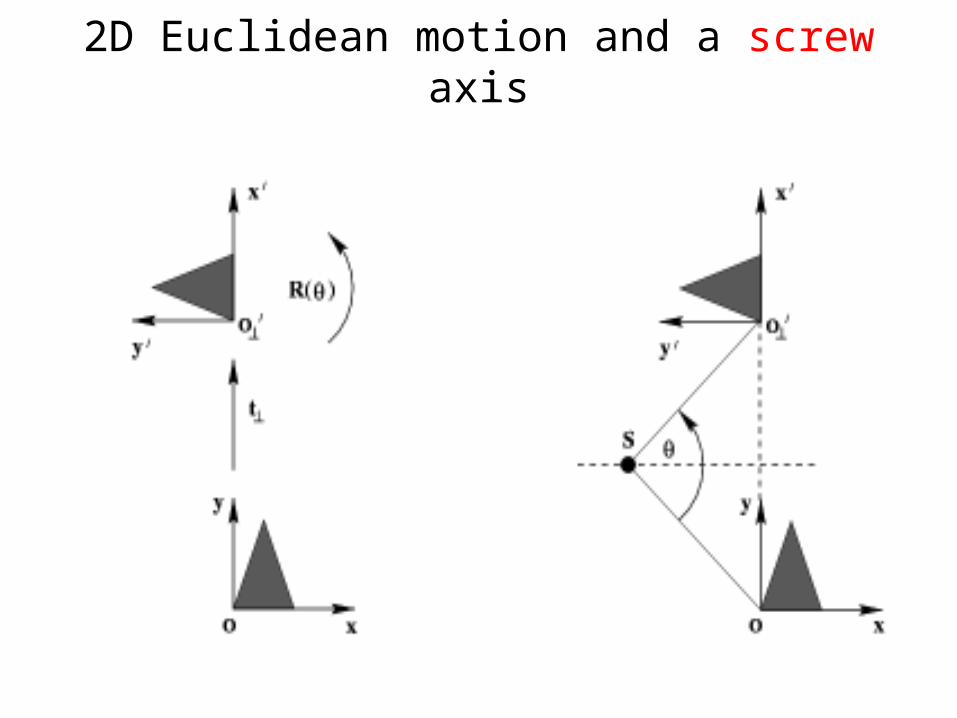
2D Euclidean motion and a screw axis
3D Euclidean motion and the screw decomposition.
• Since t can be decomposed into tll and
(components parallel to the rotation axis and perpendicular to the rotation axis).
• Then a rotation about the screw axis is equivalent to a rotation about the original and a translation
t
t

3D Euclidean motion and the screw decomposition 2
The plane at infinity
• p2 linf, circular points I,J on linf
• p3 inf, absolute conic inf on inf
The canonical form of inf = (0,0,0,1)T
in affine space.
It contains the directions D = (x1, x2, x3, 0)T

The plane at infinity 2
• Two planes are parallel if and only if , their line of intersection is on inf
• A line is parallel to another line, or to a plane if the point of intersection is on inf
• The plane inf has 3 dof and is a fixed plane under affine transformation but is moved by a general projective transform

The plane at infinity 3
• Result 2.7 The plane at infinity inf, is fixed under the projective transformation H, if and only if H is an affinity.
• Consider a Euclidean transformation
•
1000
0100
00cossin
00sin-cos
10
0R H TE
The plane at infinity 4
• The fixed plane of H are the eigenvectors of HT .
• The eigenvalues are ( eie –iand the corresponding eigenvectors of HT are
1
0
0
0
E
0
1
0
0
E
0
0
1
E
0
0
1
E 1111
ii

The plane at infinity 5
• E1 and E2 are not real planes.
• E3 and E4 are degenerate. Thus there is a pencil of fixed planes which is spanned by these eigenvectors. The axis of this pencil is the line of intersection of the planes with inf
The absolute conic
• The absolute conic, inf is a point conic on inf. In a metric frame , inf = (0,0,0,1)T and points on inf satisfy
• x12 + x2
2 + x32 = 0
• x4 = 0
• The conic inf is a geometric representation of the 5 additional dof required to specify metric properties in an affine coordinate frame.

The absolute conic 2
The absolute conic inf is fixed under the projective transformation H if and only if H is a similarity transformation.
In a metric frame, inf = I3 x 3 and is fixed by HA. One has A-T I A-1 = I (up to scale)
Taking inverse gives AAT =I implying A is orthogonal•
10
tA H TA

Absolute conic 3
inf is only fixed as a set by general similarity; it is not fixed point wise
All circles intersect inf in two points. These two are the circular points of
ll spheres intersect inf ininf

Metric properties
• Two lines with directions d1 and d2 ( 3-vectors). The angle between these two directions in a Euclidean world frame is given by
• This may be written as:
(2.22)
dddd
dd cos
2T22
T1
2T1
(2.23)
dddd
dd cos
2T22
T1
2T1
Metric properties 2
• Where d1 and d2 are the points of intersection of the lines with the plane inf containing the conic inf
• The expression (2.23) is valid in any projective coordinate frame
• The expression (2.23) reduces to (2.22) in a Euclidean world frame where inf = I.

Orthogonality and polarity
• From (2.23), two directions are orthogonal if
• Orthogonality is thus encoded by conjugacy w.r.t. inf..
• The main advantage of this is that conjugacy is a projective relation.
0 d d 2T1

(a) On inf orthogonal directions d1, d2 are conjugate w.r.t. inf
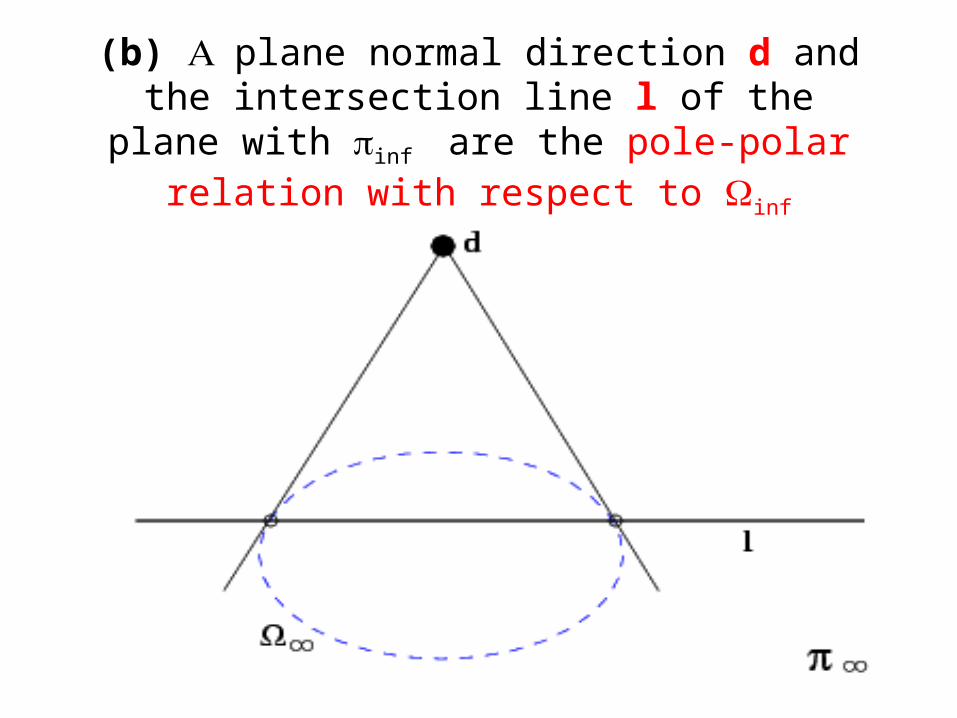
(b) plane normal direction d and the intersection line l of the plane with inf are the pole-polar relation
with respect to inf
The absolute dual quadric Qinf*
inf is defined by two equations – it is a conic on the plane at infinity.
The dual of the absolute conic inf is a degenerate dual quadric in 3-space called the absolute dual quadric, and denoted by Qinf*
Geometrically Qinf* consists of planes tangent to inf .
The absolute dual quadric Qinf* (2)
Qinf* is a 4 x 4 homogeneous matrix of rank 3, which in metric space has the canonical form
The dual quadric Qinf* is a degenerate quadric and has 8 dof. Qinf* has a significant advantage over inf in algebra
manipulations because both inf ( 5 dof) and inf (3 dof )are contained in a single geometric object.
00
0I Q T
*

The absolute dual quadric Qinf* (3)
• The absolute dual quadric Qinf* is fixed under a projective transformation H if and only if H is a similarity. That is T** H Q H Q
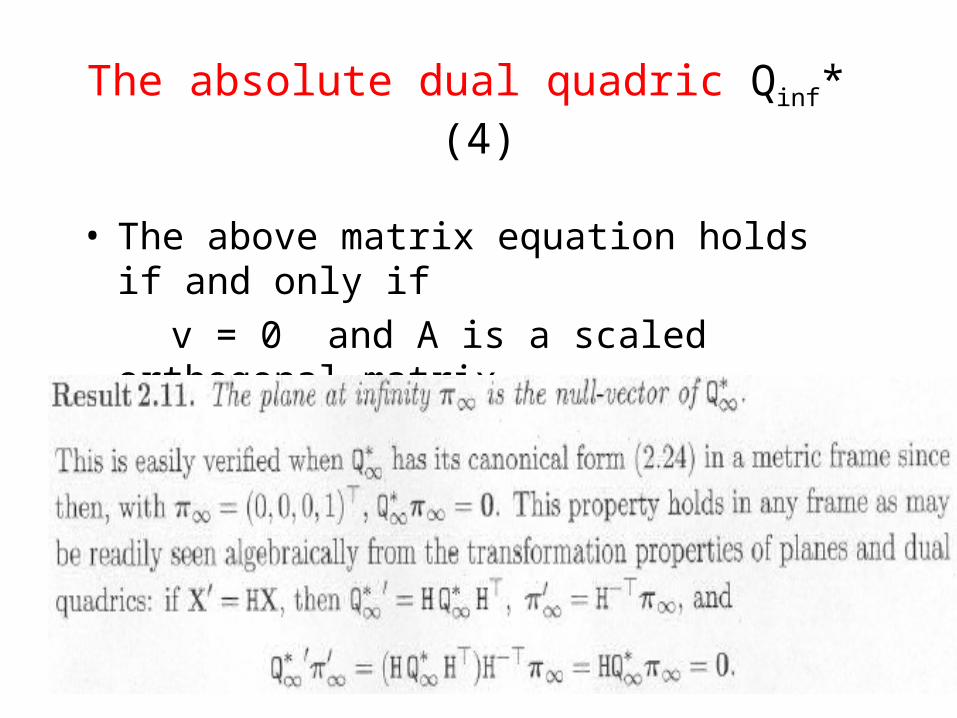
The absolute dual quadric Qinf* (4)
• The above matrix equation holds if and only if
v = 0 and A is a scaled orthogonal matrix
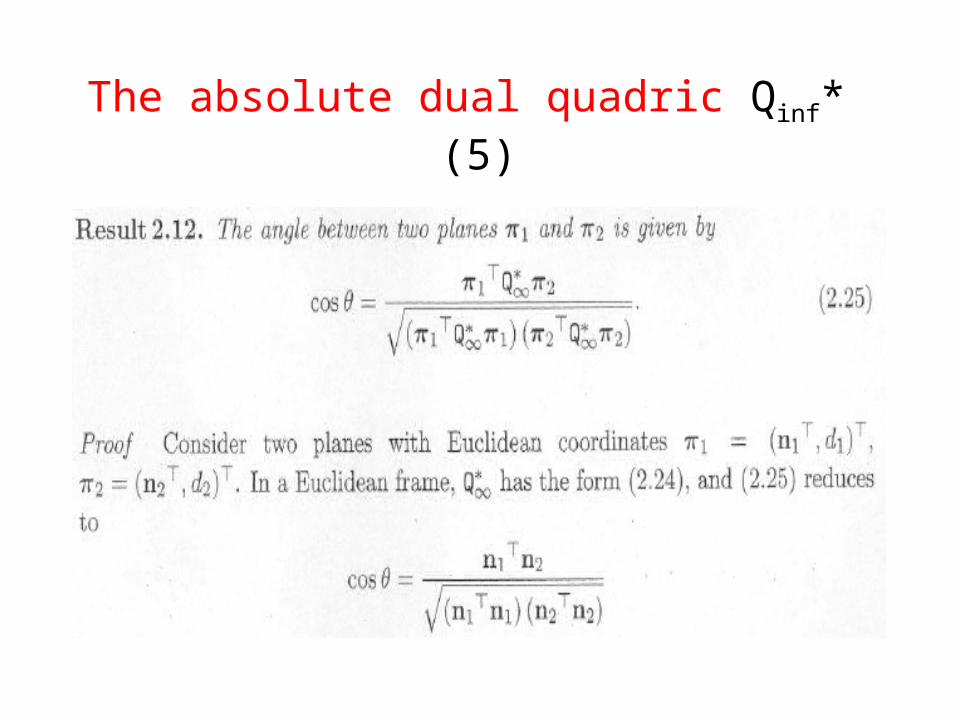
The absolute dual quadric Qinf* (5)




![GORENSTEIN ALGEBRAS PRESENTED BY QUADRICSjmiglior/MN9.pdf · ag complexes ([26]), or in studies of projective dimensions ([3]). We will say that such an algebra is presented by quadrics.](https://static.fdocuments.us/doc/165x107/5f1f69b394d78216d1289d0e/gorenstein-algebras-presented-by-jmigliormn9pdf-ag-complexes-26-or-in-studies.jpg)











![PROJECTIVE PLANES arXiv:math/0702631v1 [math.DG] 22 Feb … · 2008-02-02 · arXiv:math/0702631v1 [math.DG] 22 Feb 2007 (SEMI-)RIEMANNIAN GEOMETRY OF (PARA-)OCTONIONIC PROJECTIVE](https://static.fdocuments.us/doc/165x107/5e8ea04acd34f44807025686/projective-planes-arxivmath0702631v1-mathdg-22-feb-2008-02-02-arxivmath0702631v1.jpg)