
Project final control
15
United International Uni versity Dept. Of El ectri cal & El ectroni c Engi neeri ng (EEE) EEE 402 Control System Laboratory ID Name Secti on Project Name Date of Submi ssi on Disclaimer: I thereby certify that, this Project is prepared by me only, and I did not copy any part of this from anybody and did not let other copy any part of my Project. Sharif Ahmed Signature of the student 0 2 1 1 2 1 1 1 1 Sharif Ahmed A Part-A : Design a pd controller using root locus method and SISOTOOL design tool Part-B : Design a feedback compensator using root locus method and SISO design tool 2 1 . 1 2 . 1 4
-
Upload
shironamhin-sharif -
Category
Engineering
-
view
75 -
download
0
Transcript of Project final control

United International University Dept. Of Electrical & Electronic Engineering (EEE)
EEE 402
Control System Laboratory
ID
Name
Section
Project Name
Date of Submission
Disclaimer: I thereby certify that, this Project is prepared by me only, and I did not
copy any part of this from anybody and did not let other copy any part of my Project.
Sharif Ahmed
Signature of the student
0 2 1 1 2 1 1 1 1
Sharif Ahmed
A
Part-A : Design a pd controller using root locus method and SISOTOOL design tool Part-B : Design a feedback compensator using root locus method and SISO design tool
2 1 . 1 2 . 1 4
Project on:
Part a: Study of PD compensation& Part (b): Study of feedback compensation
Part a: Study of PD compensation
Design requirement:
Given the transfer function )10)(6)(4(
)(
sss
KsG
Design a controller that will yield no more than
25% overshoot and no more than a 2-second
settling time for a step input and zero steady state error for step and ramp inputs.
Calculation:
Before compensation:
i)%OS=25
ii)Ts=2 sec
dominant pole= -2±j4.53324
Procedure:
1. Using SISO Design tool, create the design for a unity negative feedback system with
)10)(6)(4()(
sss
KsG and plot the root locus.
2. From Edit| SISO Tool Preferences window, select Options tab, select Zero/pole/gain
radio button under Compensator Format and click Ok.
3. Right click on the SISO Design Tool window and then click on Grid.
4. Right click on the SISO Design Tool window and then click on Design Constraints| New
from the appeared window. Select Constraint Type as Percent Overshoot, set Percent
Overshoot as 25 and click Ok.
5. Select the closed-loop pole at the intersection of shadowed region and the root locus.
Write down the value obtained in the C(s) text box. Also, write down the closed-loop
poles and damping ratio obtained from View| Closed Loop Poles.
6. Select Analysis| Response to Step Command. Write down the values of percent
overshoot, peak time, settling time and steady state error from the appeared window of
LTI Viewer for SISO Design Tool.

Calculate the imaginary part, d and real part, d of the compensated dominant pole from
the two seconds settling time obtained in Step 6.
7. Find the sum of angles, 𝝨ϴ from the uncompensated system’s poles and zeros to the
desired dominant pole calculated in step 7. Then, calculate the location of compensator
zero, Zc using the formula ωd/(zc – σd) = tan (𝝨ϴ - 180 ̊)
8. Set the Value of the calculated compensated real zero to the root locus using the
window appeared after selecting Compensators| Edit | C, the value of which is obtained
in step 8.
9. Repeat step 6 and discus your findings. This is the end of PD compensation.
10. Set another real zero at -0.001 and a pole at 0 using window appeared after selecting
Compensators| Edit| C.
11. Repeat step 6 and discuss your findings. This is the end of PID compensation.
Before compensation:
For 25% Overshoot:
Dominant pole = - 2.71 ± 6.14i
K = 418
= 0.404
Now,
Kp = 0lims K G(s)
= 0lims
( 4)( 6)( 10)
K
s s s
= 4*6*10
K
= 418
4*6*10 = 1.74
So, Kp = 1.74
Now, e( ) = 1
1 Kp = 0.364
We found from step response Tp = 0.587 sec
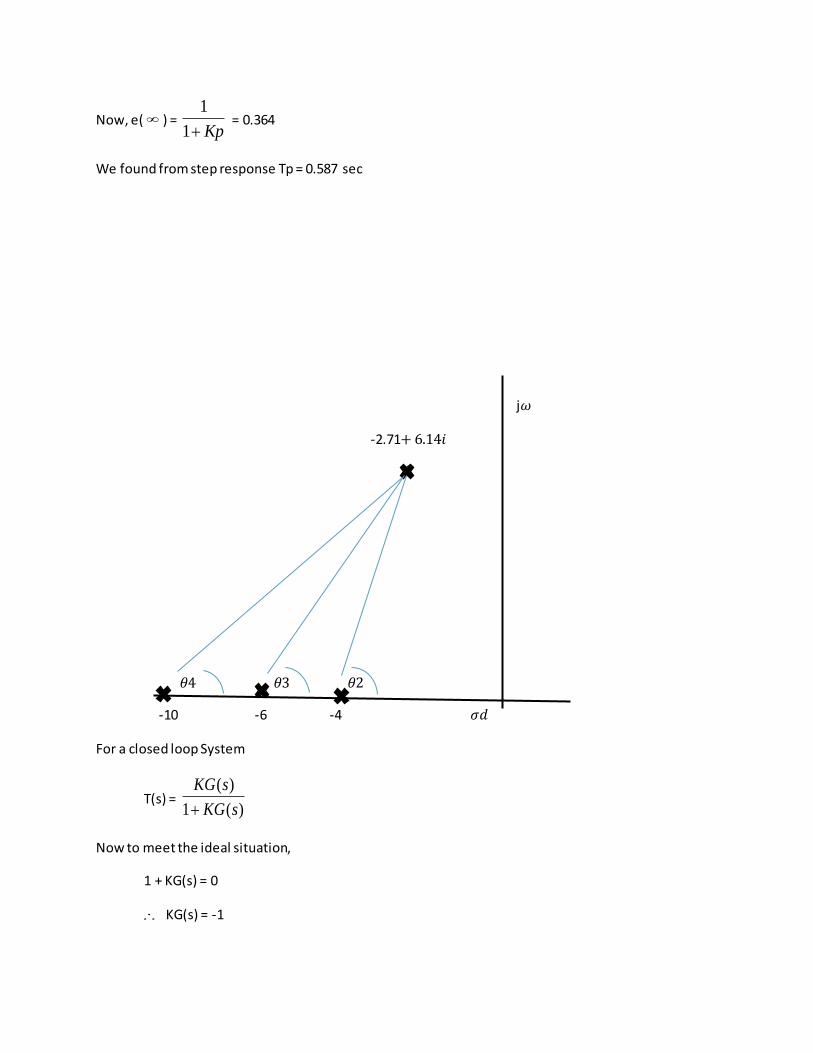
j𝜔
-2.71+ 6.14𝑖
𝜃4 𝜃3 𝜃2
-10 -6 -4 𝜎𝑑
For a closed loop System
T(s) = ( )
1 ( )
KG s
KG s
Now to meet the ideal situation,
1 + KG(s) = 0
KG(s) = -1
= 1 < ± (2n + 1) 180 ̊
Again, |KG(s)| = 1
So, < KG(s) = ± (2n + 1) 180 ̊
𝛴 𝜃 = -𝜃1 - 𝜃2 - 𝜃3 Here, 𝜃1, 𝜃2 , 𝜃3 =angles due to Poles
= ±180 ̊
Calculation after compensation:
Percent overshoot % OS = 25 and settling time T’p = 2 sec
And the new dominant Pole = - 𝜎𝑑 ± jωdc
Now,
T’s = 4
dc = 2
Again 𝜃 = 1cos =
1cos (0.404) = 66.17
tan𝜃 =
dc
dc
= 2
dc
dc = 2 * tan = 4.53
New Dominant Pole =- 𝜎𝑑𝑐 ± jωdc = - 2 + 4.53i
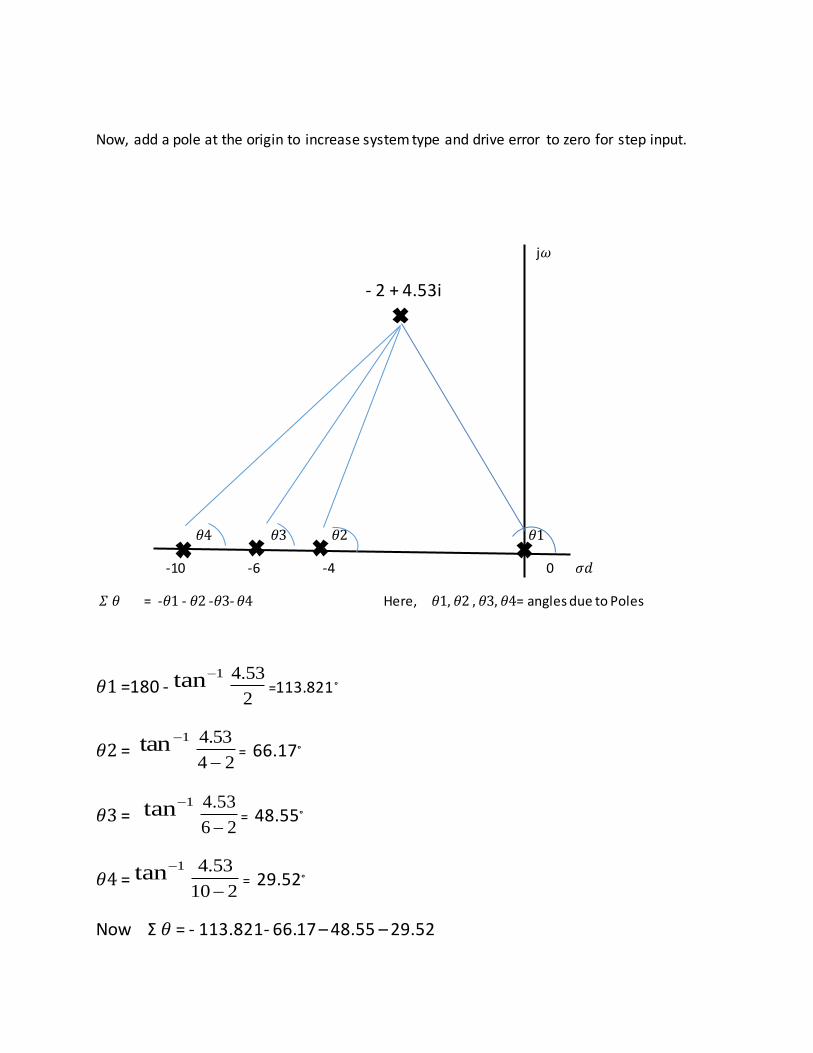
Now, add a pole at the origin to increase system type and drive error to zero for step input.
j𝜔
- 2 + 4.53i
𝜃4 𝜃3 𝜃2 𝜃1
-10 -6 -4 0 𝜎𝑑
𝛴 𝜃 = -𝜃1 - 𝜃2 -𝜃3- 𝜃4 Here, 𝜃1, 𝜃2 , 𝜃3, 𝜃4= angles due to Poles
𝜃1 =180 -1tan 4.53
2=113.821 ̊
𝜃2 = 1tan 4.53
4 2= 66.17 ̊
𝜃3 = 1tan 4.53
6 2= 48.55 ̊
𝜃4 =1tan 4.53
10 2= 29.52 ̊
Now Σ 𝜃 = - 113.821- 66.17 – 48.55 – 29.52
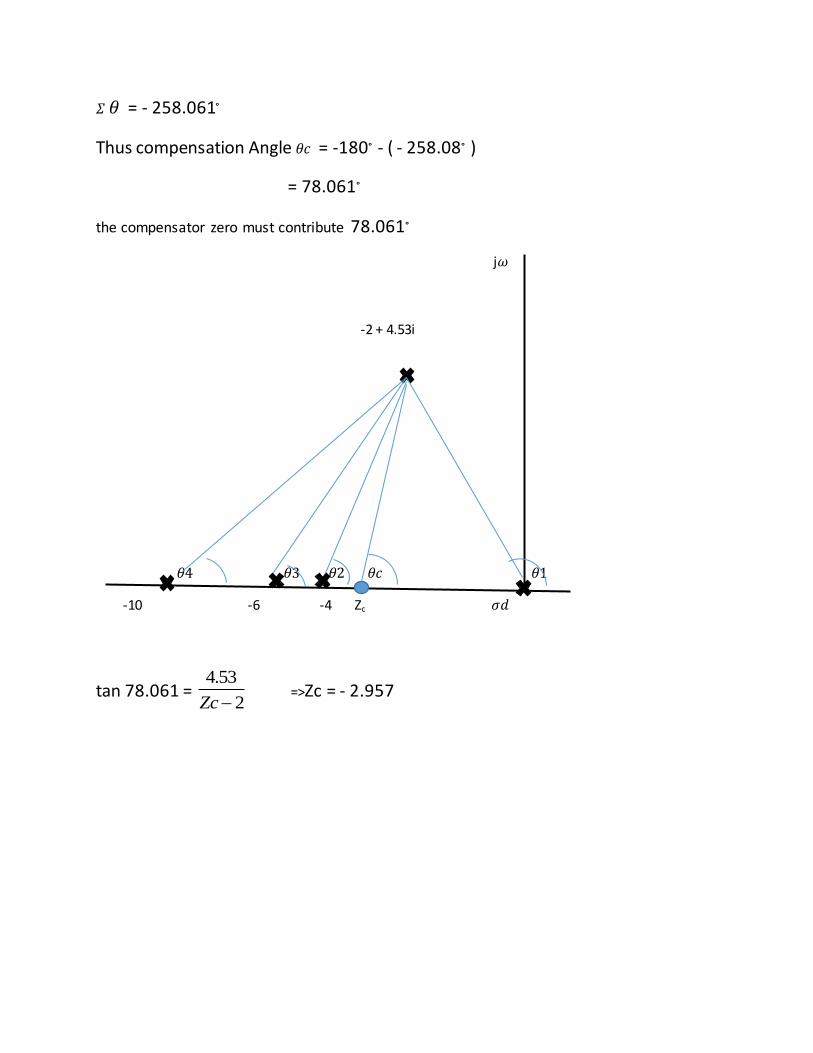
𝛴 𝜃 = - 258.061 ̊
Thus compensation Angle 𝜃𝑐 = -180 ̊ - ( - 258.08 ̊ )
= 78.061 ̊
the compensator zero must contribute 78.061 ̊
j𝜔
-2 + 4.53i
𝜃4 𝜃3 𝜃2 𝜃𝑐 𝜃1
-10 -6 -4 Zc 𝜎𝑑
tan 78.061 = 4.53
2Zc =>Zc = - 2.957

New transfer function G(s) = ( 2.957)
( 4)( 6)( 10)
s
s s s
Uncompensated PD-compensated PID-compensated
Plant and Compensator ( 4)( 6)( 10)
K
s s s
K( 2.957)
s( 4)( 6)( 10)
s
s s s
2
( 2.957)(s 0.001)
s ( 3)( 6)( 10)
s
s s s
Dominant Poles
-2.71±6.14i -2.1±4.51i -2.1 ±4.51i
K 418 291 292
0.404 0.408 0.406
n 6.71 4.93 4.94
%OS 25 25 25
Ts 1.32 1.94 1.76
Tp 0.587 0.235 0.801
Kp& Kv Kp = 1.74 Kv = 13.27 Kp=
Kp=∞ Kv=
e( )
0.364 e( ) for Kv=0.0753 e( )for Kp= 0
Kp=0 Kv=0
Other poles -14.6 -13.3, -2.66 -13.3, -2.66,-0.001
Zeroes none -2.957 -2.957, -0.001
Part b: Study of feedback compensation

a. Design the value ofK1, as well as a in the feedback
path of the minor loop, to yield a settling time of 1
second with 5% overshoot for the step response.
b. Design the value of K to yield a major-loop
response with 10% overshoot for a step input.
c. Use MATLAB or any other computer
program to simulate the step response to the entire closedloop system.
d.
Add a PI compensator to reduce
the major-loop steady-state
error to zero and simulate the step
response using MATLAB or any other
computer program
Procedure:
Minor-loop compensated system:
1. Using SISO Design tool, create the design for the minor loop containing the plant G(s)
with K1 = 1 and the feedback compensator H(s) = s+a and plot the root locus. The value
of Kf will be adjusted to the location of minor-loop poles
2. From Edit| SISO Tool Preferences window, select Options tab, select Zero/pole/gain
radio button under Compensator Format and click Ok.

Right click on the SISO Design Tool window and then click on Grid.
3. Right click on the SISO Design Tool window and then click on Design Constraints| New
from the appeared window. Select Constraint Type as %OS, set Damping it as 5 and click
Ok.
4. Select the closed-loop pole at the intersection of shadowed region and the root locus.
Write down the value obtained in the C(s) text box. This value is equal to Kf. Also, write
down the closed-loop poles and natural frequency obtained from View| Closed Loop
Poles.
5. Select Analysis| Response to Step Command. Write down the values of percent
overshoot, peak time, settling time and steady state error from the appeared window of
LTI Viewer for SISO Design Tool. The performance is tabulated in Table 1.
The entire Closed-loop compensated system:
The closed loop poles and zeros for the minor loop are the open loop poles for the entire unity-
feedback closed-loop system. Henceforth, repeat the steps 1, 4, 5, and 7, complete the
compensation, but this time %OS of 10 for step 4.
This is the end of feedback-compensation using approach 2
Calculation:
Given, settling time, Ts= 1sec
% OS=5%
Now, σd= Ts
4=4
We know, % OS 100)1/( 2
e
= 689.04.3409
2.995
Now, ωn = σd=4

=> ωn= 805.50.689
4
Thus, 2
nd 1 =4.20
Dominant pole dd j =-4±j4.20
4+j4.20
j ωd
𝜃3 𝜃2 𝜃1
-9 -4 0 𝜎𝑑
𝜃1= 180 ̊ - 1tan 4.20
133.64
𝜃2= 90 ̊
𝜃3= 1tan 4.30
40.039 4
Now ∑ 𝜃= -133.6 – 90-40.03=-263.63
So the compensated angle should be, 𝜃𝑐=-180-(-263.63)=83.63.
Since the angle is positive, so we have to add a zero in the transfer function
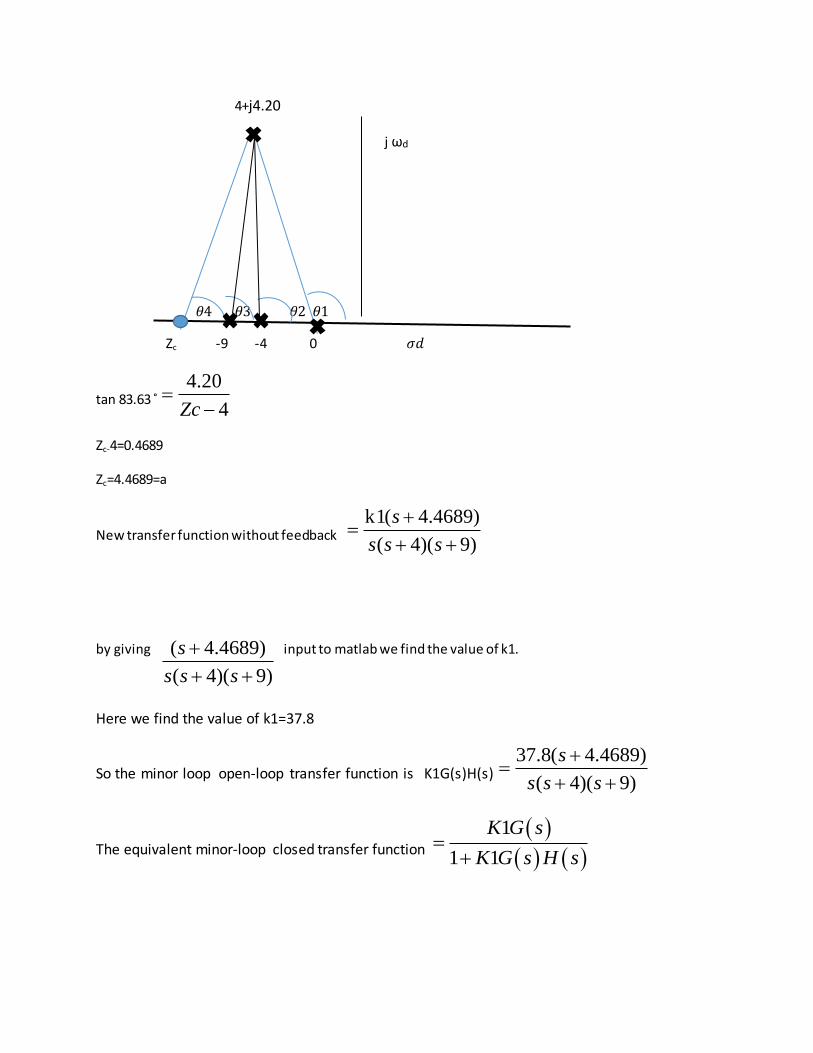
4+j4.20
j ωd
𝜃4 𝜃3 𝜃2 𝜃1
Zc -9 -4 0 𝜎𝑑
tan 83.63 ̊4.20
4Zc
Zc-4=0.4689
Zc=4.4689=a
New transfer function without feedback k1( 4.4689)
( 4)( 9)
s
s s s
by giving ( 4.4689)
( 4)( 9)
s
s s s
input to matlab we find the value of k1.
Here we find the value of k1=37.8
So the minor loop open-loop transfer function is K1G(s)H(s)
37.8( 4.4689)
( 4)( 9)
s
s s s
The equivalent minor-loop closed transfer function
1
1 1
K G s
K G s H s
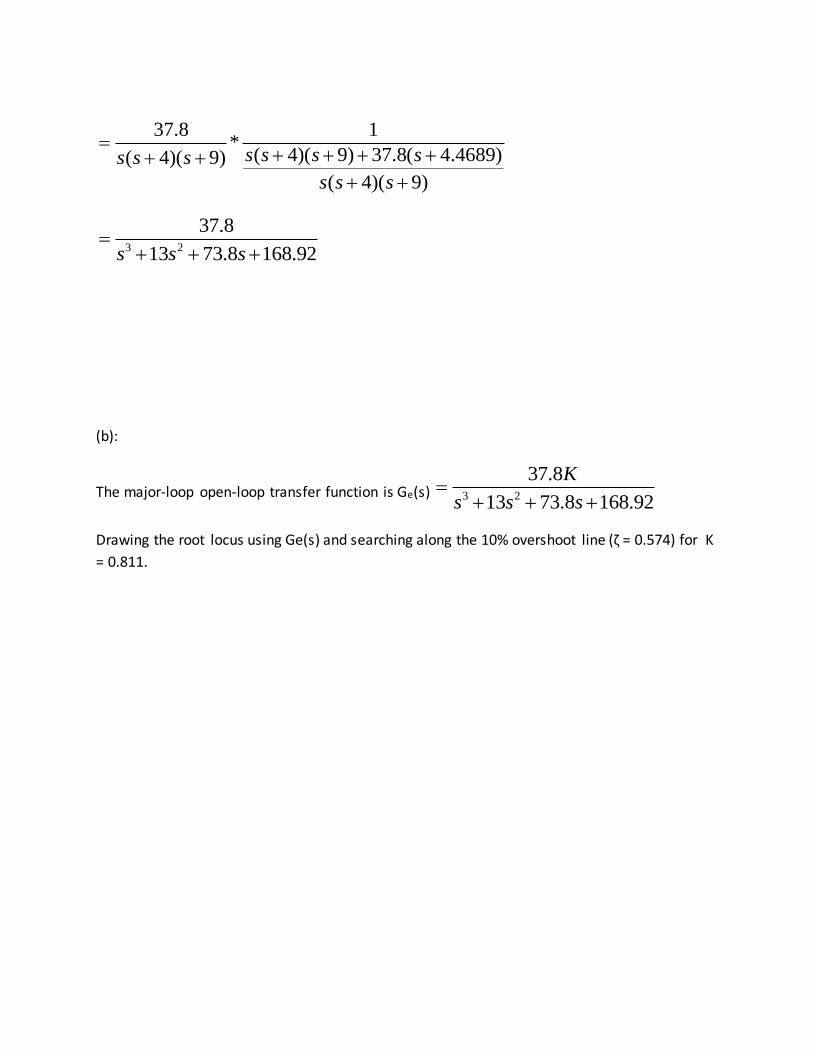
37.8 1*
( 4)( 9) 37.8( 4.4689)( 4)( 9)
( 4)( 9)
s s s ss s s
s s s
3 2
37.8
13 73.8 168.92s s s
(b):
The major-loop open-loop transfer function is Ge(s)
3 2
37.8
13 73.8 168.92
K
s s s
Drawing the root locus using Ge(s) and searching along the 10% overshoot line (ζ = 0.574) for K
= 0.811.

Now the uncompensated and compensated value table should be like this:
Uncompensated Compensated
Plant and
Compensator 3 2
1
13 36
K
s s s 3 2
37.8
13 73.8 168.92
K
s s s
Dominant Poles -1.56±j1.64 -3.33±j4.53
Gain K1=50.8 K=0.86
0.689 0.592
n 2.27 5.62
% OS 5 5
Ts 2.75 1.1
Tp 2.03 0.927
Kv 1.411 0
e() 0.708
Other poles -9.87 -6.34
Zeroes - -

(c): MAtlab code
(d):
Add a PI compensator to reduce the major-loop steady-state
error to zero. So the new transfer function is 3 2
37.8( 0.001)
s( 13 73.8 168.92)
s
s s s
And major loop steady sate error reduced to 0.000192.
Discussion:
Part a:
In order to obtain the desired performance of the system, we use compensating networks.
Compensating networks are applied to the system in the form of feed forward path gain
adjustment. Dominant pole is the complex pole. If more than one complex pole is present in a
system then we have to consider the nearest to origin one. We moved the dominant pole to the
root locus. If the compensation angle is positive we have to add zero in that system. If it is
negative we have to add pole in that system. From the table it is clear that for changing settling
time is 2 sec we must be set the value of K such that it should follow the two properties: 1:
KG(s)=-1
2: G(s) (2n 1) 180K
Part b:
Transfer functions designed to be placed in a feedback path can also reshape the root locus.
This design is more complicated that cascaded system design. On the other hand, feedback
compensation can yield faster responses. However this compensation can be achieved by two
approach. In the first approach effect of adding feedback is similar like add new poles and zeros
via H(s) to reshape the root locus to go through the design point. however one thing must be
remember that zeros of the equivalent feedback is not closed loop zeros. The second approach
allows us to use feedback compensation to design a minor loop’s transient response separately
from closed loop system response. Minor loop is the small loop including a feedback path. In
our experiment minor loop was defined as the loop containing the plant, 1/[s(s+4)(s+9)], and
the feedback compensator, Kfs. here the value of Kf will be adjusted to set the location of the
minor loop poles, and then K will be adjusted to yield the desired closed loop response. We can
see from the table that steady state error is reduced after compensation in both approach. The
system also work faster.


















