PROGRAMMABLE AIR-JET TOOLING FOR VIBRATORY BOWL...
197
PROGRAMMABLE AIR-JET TOOLING FOR VIBRATORY BOWL FEEDER SYSTEMS DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Neboja Ilija Jaki· c, M.S. I.S.E., M.S. E.E. * * * * * The Ohio State University 2000 Dissertation Committee: Approved by Professor Gary Maul, Adviser Professor Jerald Brevick __________________________ Adviser Professor Dave Farson Industrial Welding and Systems Engineering
Transcript of PROGRAMMABLE AIR-JET TOOLING FOR VIBRATORY BOWL...

PROGRAMMABLE AIR-JET TOOLING FOR VIBRATORY BOWL FEEDER SYSTEMS
DISSERTATION
Presented in Partial Fulfillment of the Requirements for
the Degree Doctor of Philosophy in the Graduate
School of The Ohio State University
By
Neboja Ilija Jakic, M.S. I.S.E., M.S. E.E.
* * * * *
The Ohio State University 2000
Dissertation Committee: Approved by Professor Gary Maul, Adviser
Professor Jerald Brevick __________________________ Adviser
Professor Dave Farson Industrial Welding and Systems Engineering

ii
ABSTRACT
Vibratory bowl feeders (VBFs) are the most versatile devices used in the feeding of small
mechanical parts during part assembly processes. They are used in high volume, high
speed production. Due to the lengthy setup times, their use in short runs is extremely
limited. This research overcomes long time delays in retooling VBFs. A new family of
flexible adaptive VBF tooling based on air jets is designed, built and tested. The new
tools are capable of feeding a number of different parts from a given set of part families
in different sizes and various orientations without jamming. The results of this research
will enable manufacturers to implement VBFs in low volume assembly processes with
short or nonexistent downtimes due to the retooling of the feeders and compete more
successfully in todays global market leading towards personalized manufacturing.

iii
DEDICATION
Dedicated to my parents

iv
ACKNOWLEDGMENTS
I wish to express my deepest gratitude to my advisor, Professor Gary Maul, for his continuous
guidance and support during the course of this endeavor. I am greatly thankful to Professor
Jerry Brevick for his insightful comments, practical suggestions and helpful advice. In
addition, the cooperation and fruitful discussion with Professor Dave Farson is deeply
appreciated.
Special thanks go to my officemates Xiangdong and Reza for their understanding, helpful hints
and productive discussions.
Finally, I want to express my thanks to my wife Dawn for all her support, love and belief in me
through all these years.

v
VITA
December 4, 1960 Born - Kosovska Mitrovica, Yugoslavia
1984 Dipl. Ing., Electrical Engineering, Belgrade University, Belgrade, Yugoslavia
1988 M.S., Department of Electrical Engineering, The Ohio State University Columbus, Ohio
1992 M.S., Department of Industrial and Systems Engineering, The Ohio State University Columbus, Ohio
1985 1990 and 1995 - 1997 Graduate Research and Teaching Associate, The Ohio State University Columbus, Ohio
1992 - present Assistant/Associate Professor, DeVry Institute of Technology, Columbus, Ohio

vi
PUBLICATIONS
Research Publication
1. G. Maul, N. Jaksic, Sensor-Based Solution to Contiguous and overlapping
Parts in Vibratory Bowl Feeders, Journal of Manufacturing Systems, Vol. 13, No. 13,
1994
2. V. Potkonjak, N. Jaksic, "A Contribution to Computer-Aided Choice of DC
Motors for Manipulation Robots," Robotica, Jan. - Mar. 1986, UK.
FIELDS OF STUDY
Major Field: Industrial Welding and Systems Engineering

vii
TABLE OF CONTENTS
DEDICATION .....................................................................................................................................................iii
ACKNOWLEDGMENTS .................................................................................................................................. iv
VITA....................................................................................................................................................................... v
TABLE OF CONTENTS...................................................................................................................................vii
LIST OF TABLES............................................................................................................................................... ix
LIST OF FIGURES.............................................................................................................................................xi Chapter 1 INTRODUCTION ..................................................................................................................... 1
1.1 Introduction............................................................................................................................. 1 1.2 Vibratory Bowl Feeders Overview ......................................................................................... 3 1.3 Organization of Orienting Devices ......................................................................................... 5 1.4 Part Reorientation ................................................................................................................... 8 1.5 Part Kinetics............................................................................................................................ 9 1.6 Programmable VBFs Research ............................................................................................. 10 1.7 Research Objectives and Organization ................................................................................. 15
Chapter 2 PART REORIENTATION BY AIR-JET BASED TOOLS .................................................... 20 2.1 Simple Flat Rectangular Part ................................................................................................ 20 2.2 Passive Air-jet Tooling ......................................................................................................... 22 2.3 Active Air-jet Tooling........................................................................................................... 29 2.4 Air-jet Based Tooling Equivalence Example........................................................................ 31 2.5 Study of Air-Jet Forces ......................................................................................................... 33 2.6 Study of Part Motion along the Track of the Bowl ............................................................... 47 2.7 Reorienting Parts in the Track Plane..................................................................................... 52 2.8 Reorienting Parts in the Bowl Wall Plane............................................................................. 61 2.9 Reorienting Parts in the Plane Orthogonal to the Track and the Wall Plane......................... 65
Chapter 3 COMPUTER MODELS AND SIMULATIONS..................................................................... 69 3.1 Model for Part Reorientation in the Plane of the Bowl Track............................................... 69 3.2 Model Implementation Issues ............................................................................................... 89 3.3 Model for Part Reorientation in the Bowl Wall Plane .......................................................... 94 3.4 Model for Part Reorientation in the Plane Orthogonal to the Track and the Wall Plane .... 101 3.5 Simulation Results .............................................................................................................. 106
Chapter 4 IMPLEMENTATION AND EXPERIMENTAL RESULTS ................................................ 116 4.1 Experimental VBF System ................................................................................................. 116 4.2 Part Reorientation in the Track Plane an Alternative View ............................................. 132 4.3 Parts Used in Experiments .................................................................................................. 134 4.4 Experimental Results .......................................................................................................... 136 4.5 Comparison of Simulation and Experimental Results ........................................................ 151
Chapter 5 CONCLUSION...................................................................................................................... 153 5.1 Conclusions and Recommendations ................................................................................... 153

viii
5.2 Research Contributions....................................................................................................... 156 5.3 Future Work........................................................................................................................ 157
APPENDICES...................................................................................................................................................160 APPENDIX A..................................................................................................................................... 161 APPENDIX B..................................................................................................................................... 166
Bibliography ......................................................................................................................................................183

ix
LIST OF TABLES Table Page Table 2.1: Pressure Force Table: Experimental and Regression Results ....................................36 Table 2.2: Highest Frequency vs. Pressure Table for Humphreys 401 Directional Air-valve......46 Table 2.3: Average Part Velocities (m/sec)..........................................................................................48 Table 2.4: Boundary Conditions for Part Rotation Angle θ.............................................................59 Table 3.1: Simulation - Initial Conditions for 2-D Model.................................................................71 Table 3.2: Model Boundary Conditions ...............................................................................................73 Table 3.3: Part and Process Characteristics..........................................................................................75 Table 3.4: Part Stopping Distance Summary as a Function of Amplitude Setting.......................90 Table 3.5: Part Characteristics ..............................................................................................................106 Table 3.6: Connector Housing, m=1.91 g, Reorientation in the Track Plane, Simulations .....107 Table 3.7: Connector Housing, m=4.91 g, Reorientation in the Track Plane, Simulations .....108 Table 3.8: Connector Housing, m=7.65 g, Reorientation in the Track Plane, Simulations .....109 Table 3.9: Push-button Switch, Reorientation in the Track Plane, Simulations .........................110 Table 3.10: Solid-state Relay, Reorientation in the Track Plane, Simulations .............................111 Table 3.11: Rectangular Wooden Prism, Reorientation in the Track Plane, Simulations .........112 Table 3.12: Rectangular Aluminum Prism, Reorientation in the Track Plane, Simulations .....113 Table 3.13: Reorientation in the Wall Plane, Simulations ...............................................................114 Table 3.14: Reorientation in the Plane Normal to the Track and the Bowl Wall Plane,
Simulations.................................................................................................................................115 Table 4.1: Connector Housing, m=1.91 g, Reorientation in the Track Plane.............................140 Table 4.2: Connector Housing, m=4.91 g, Reorientation in the Track Plane.............................140 Table 4.3: Connector Housing, m=7.65 g, Reorientation in the Track Plane.............................141 Table 4.4: Push-button Switch, Reorientation in the Track Plane, Case #1 ...............................142 Table 4.5: Push-button Switch, Reorientation in the Track Plane, Case #2 ...............................143 Table 4.6: Solid-state Relay, Reorientation in the Track Plane.......................................................144 Table 4.7: Rectangular Wooden Prism, Reorientation in the Track Plane, Case #1 .................144 Table 4.8: Rectangular Wooden Prism, Reorientation in the Track Plane, Case #2 .................145 Table 4.9: Rectangular Aluminum Prism, Reorientation in the Track Plane...............................146 Table 4.10: Connector Housing, m=1.91 g, Reorientation in the Bowl Wall Plane ..................147 Table 4.11: Connector Housing, m=4.91 g, Reorientation in the Bowl Wall Plane ..................147 Table 4.12: Connector Housing, m=7.65 g, Reorientation in the Bowl Wall Plane ..................147 Table 4.13: Push-button Switch, Reorientation in the Bowl Wall Plane......................................148 Table 4.14: Solid-state Relay, Reorientation in the Bowl Wall Plane ............................................149 Table 4.15: Rectangular Wooden Prism, Reorientation in the Bowl Wall Plane........................149 Table 4.16: Rectangular Aluminum Prism, Reorientation in the Bowl Wall Plane ....................150 Table 4.17: Results: Reorienting Parts in the Plane Normal to the Track and the Wall Plane 151 Table 5.1: Frequency Response Test Data for Humphreys 401 Micro Solenoid Air Valves..173

x
Table 5.2: Air Jet Spatial Distribution Data for Maximum Air-jet Force of 0.021 N................177 Table 5.3: Air Jet Spatial Distribution Data for Maximum Air-jet Force of 0.051 N................178 Table 5.4: Air Jet Spatial Distribution Data for Maximum Air-jet Force of 0.126 N................179 Table 5.5: Air Jet Spatial Distribution Data for Maximum Air-jet Force of 0.32 N..................180 Table 5.6: Air Jet Spatial Distribution Data for Maximum Air-jet Force of 0.632 N................181

xi
LIST OF FIGURES Figure Page Figure 1.1: Vibratory Bowl Feeder .......................................................................................................... 4 Figure 1.2: Typical Tooling Applications for a VBF............................................................................ 8 Figure 1.3: Three-Dimensional Sensor-Based Vibratory Bowl Feeder ..........................................14 Figure 1.4: Adaptive Control of a VBF Using Passive Tools...........................................................17 Figure 1.5: Adaptive Control of a VBF Using Active Tools ............................................................18 Figure 2.1: Stable Resting Positions of a Simple Flat Rectangular Part in a VBF ........................22 Figure 2.2: Wiper-blade and its Air-jet Equivalent .............................................................................23 Figure 2.3: Pressure Break and its Air-jet Equivalent ........................................................................24 Figure 2.4: Narrow Track and its Air-jet Equivalent..........................................................................25 Figure 2.5: Hold Down and its Air-jet Equivalent .............................................................................26 Figure 2.6: Silhouette Track and its Air-jet Equivalent......................................................................27 Figure 2.7: Silhouette Wall and its Air-jet Equivalent ........................................................................28 Figure 2.8: Edge Riser and its Air-jet Equivalent................................................................................30 Figure 2.9: Step and its Air-jet Equivalent ...........................................................................................31 Figure 2.10: Air-jet Based Tooling Equivalence Example ................................................................32 Figure 2.11: Air Jet Acting on a Rectangular Part...............................................................................33 Figure 2.12: Humphreys 401 Micro Solenoid Air Valve .....................................................................34 Figure 2.13: Force vs. Pressure Curve for Experimental Air-jet System........................................37 Figure 2.14: Force vs. Pressure Curves Linear Regression Comparison ....................................38 Figure 2.15: Force vs. Pressure Curves Quadratic Regression Comparison..............................39 Figure 2.16: Force vs. Pressure Curves Cubic Regression Comparison .....................................40 Figure 2.17: Force vs. Distance Curves for Various Pressures ........................................................41 Figure 2.18: Air Cone Diameter vs. Distance from Nozzle .............................................................43 Figure 2.19: Average Air Cone Diameter vs. Distance from Nozzle .............................................43 Figure 2.20: Air-jet Pressure Response to Step Pulse Excitation ....................................................46 Figure 2.21: Part Hopping along the Bowl Track Obtained by High-speed Camera ..............51 Figure 2.22: Part Kinematics in 2-D, Plane View of Track ..............................................................53 Figure 2.23: Simplified Snapshot of Part Position/Orientation ......................................................56 Figure 2.24: Free Body Diagram for a Rectangular Part ...................................................................57 Figure 2.25: Boundary Conditions for π/2 Radians Rotation..........................................................60 Figure 2.26: Boundary Conditions for π Radians Rotation ..............................................................60 Figure 2.27: Boundary Conditions for 3π/2 Radians Rotation .......................................................61 Figure 2.28: An Air Jet Reorienting a Part in the Plane Normal to the Track ..............................62 Figure 2.29: Reorienting a Part in the Bowl Wall Plane, Side View ................................................63 Figure 2.30: An Air Jet Reorienting a Part in the Plane Normal to the Track and the Wall ......65 Figure 2.31: Reorienting a Part in the Plane Normal to the Track and the Wall, Side View......67 Figure 3.1: Extent of Air Jet Action on Part........................................................................................73

xii
Figure 3.2: Timing Diagram of the Force the Bowl Wall Exerts on the Part ...............................76 Figure 3.3: Timing Diagram of the Air Jet Force Exerted on the Part...........................................77 Figure 3.4: Timing Diagram of the Parts Linear Displacement......................................................78 Figure 3.5: Timing Diagram of the Parts Angular Displacement...................................................79 Figure 3.6: Timing Diagram of the Parts Linear Velocity ................................................................79 Figure 3.7:Timing Diagram of the Parts Angular Velocity ..............................................................80 Figure 3.8:Timing Diagram of the Parts Linear Acceleration .........................................................81 Figure 3.9:Timing Diagram of the Parts Angular Acceleration ......................................................82 Figure 3.10:Track Tilt Angle...................................................................................................................83 Figure 3.11: Displacement of Parts c.g. as a Function of Track Tilt Angle..................................85 Figure 3.12: Total Angle of Rotation as a Function of Track Tilt Angle.......................................86 Figure 3.13: Displacement of Parts c.g. as a Function of the Wall Coefficient of Friction.......88 Figure 3.14: Total Angle of Rotation as a Function of the Wall Coefficient of Friction............89 Figure 3.15: Displacement of Parts c.g. as a Function of its Stopping Distance.........................92 Figure 3.16: Total Angle of Rotation as a Function of the Stopping Distance.............................92 Figure 3.17: Variables Describing the Part Motion in the Bowl Wall Plane................................100 Figure 3.18: Variables Describing the Part Motion in the Plane Normal to the Track and the
Wall Plane...................................................................................................................................105 Figure 4.1: Experimental VBF System................................................................................................118 Figure 4.2: Experimental Setup of Air-jet Based Tools...................................................................119 Figure 4.3: Top View of Air Jet Forces Pulling a Part .....................................................................121 Figure 4.4: Complete Pneumatic Circuit of an Air-jet Tool ...........................................................122 Figure 4.5: LabVIEW Block Diagram Used with Pressure Sensor...............................................124 Figure 4.6: Electrical Schematic of Control Hardware for Experimental VBF System............128 Figure 4.7: Flow Chart of the Test Control Program ......................................................................131 Figure 4.8: Various Parts Used in Model Verification .....................................................................135 Figure 4.9: A Part in Various Stages of Reorientation Obtained by High-speed Camera ........138 Figure 5.1: Air Jet Response P = 1.38 bar, f = 5 Hz, l=0.05 m.....................................................168 Figure 5.2: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 1.5 m.....................................................168 Figure 5.3: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 3 m........................................................169 Figure 5.4: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 4.5 m.....................................................169 Figure 5.5: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 6 m........................................................170 Figure 5.6: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 0.05 m...................................................170 Figure 5.7: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 1.5 m.....................................................171 Figure 5.8: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 3 m........................................................171 Figure 5.9: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 4.5 m.....................................................172 Figure 5.10: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 6 m......................................................172

1
Chapter 1
INTRODUCTION
1.1 Introduction
Assembly became a vital part of manufacturing ever since Eli Whitneys ideas of mass
production and interchangeable parts were implemented starting in 1798. The parts
produced were designed for assembly - they were produced with greater precision (by the use
of machines) than before. In 1908, Henry Ford thought of dividing the manufacture of cars
into steps creating the first assembly line. Later, the manual assembly was replaced with
automatic assembly wherever economically feasible. For high production runs special
machines for assembly were developed and implemented. The parts to be assembled were
presented to the assembly machines by part feeders and magazines.
In order to increase the flexibility of automated assembly, industrial manipulators and
automated work cells were developed. The computer revolution improved robot controls,
and integrated automated work-cells into factory-wide assembly networks. Implementation
of computerized company-wide hierarchical control is underway in some large size
companies.
The fundamental reasons for automating a process are: improved part quality, increased
productivity through faster cycle time, increased yield (less scrap), reduced labor, improved
worker safety and reduced work in progress [1]. In the present global economy of fierce

2
competition, the product quality and uniformity, as well as timely delivery, play roles as
important as the cost of the product. An automated process can be easily analyzed by using
statistical means for quality control and enhanced by continuous quality improvement
techniques - leading to a more tightly controlled process, higher quality products, lower cost
and satisfied customers.
Part feeders supply parts to the assembly machines, and as such are an integral part of most
automated assembly processes. Due to the high initial costs, the specialized assembly
machines are most often not a viable choice for small-to-medium production runs. Instead,
flexible automatic assembly systems including one or more assembly cells are used. An
automated flexible assembly cell usually consists of an industrial manipulator, a feeding
system (including one or more part feeding devices) and a transfer system. An industrial
manipulator can be programmed off-line to aid in the assembly of many different products.
The downtime between the runs due to the reprogramming of the assembly manipulator can
be decreased considerably by using faster and more advanced computers. Consequently,
minimizing the downtime required for set-up and retooling of part feeders that supply parts
to the assembly robots becomes critical.
A part feeder is a device that receives a number of randomly oriented parts at its input and
delivers the correct parts in a certain predefined orientation at its output within specified time
limits. They can be divided into two major groups: vibratory and non-vibratory feeders.
Most of the non-vibratory part feeders are designed to feed specific parts or very limited part
families. Mostly, they are used in medium-to-large production runs where the feeding part
variability is minimal. Some examples include various hopper feeders (centerboard,

3
centrifugal, reciprocating, tube or fork, stationary or revolving hook, elevating etc.), disk
feeders (rotary and magnetic), and belt feeders [2,3]. Magazines are part-dispensing devices
where the parts supplied are already in the correct orientation. Neither the non-vibratory part
feeders nor magazines are well suited for automation of small-to-medium production runs
due to their inflexibility.
Vibratory bowl feeders (VBFs) are the most versatile devices for feeding of small parts in the
manufacturing assembly process and as such, they are widely used in industry. Mainly, they
are implemented in medium to high production runs because of high tooling costs and long
down times needed for retooling. One third of the cost of an assembly system can be
attributed to these feeders and associated transfer conveyors [4]. Just a VBF alone may cost
in excess of $10,000 [5].
1.2 Vibratory Bowl Feeders Overview
A typical VBF depicted in Figure 1.1 consists of a shallow cylindrical bowl supported by
suspension springs attached to a cylindrical base resting on support feet and carrying an
electromagnet. Inside the bowl an inclined helical track is formed. The bowl rests on three
(or four) inclined leaf springs. An electromagnet mounted on the base and under the bowl is
powered from an AC source causing the bowl to vibrate (some designs use more than one
electromagnet). Due to the incline of the leaf springs, the bowl vibration has two
components, a linear vertical component and a torsional component about the vertical axis of
the device. The bowl vibration causes the points on the inclined track to vibrate along a path
whose incline is larger than that of the track. The parts in the bowl of a properly designed
VBF travel upward along the track and towards the outlet by either sliding or hopping.

4
When sliding, as the bowl rises and twists forward (rotation towards the outlet) the friction
between the bowl and the part advances the part together with the bowl. When the bowl
descends and rotates away from the outlet due to the electromagnetic forces, the friction
between the part and the bowl becomes sufficiently low that the part slides over the bowl,
moving towards the outlet. In hopping, the electromagnetic pulling force is so high that the
bowls downward acceleration exceeds that of gravity and the part experiences free-fall, while
the bowl rotates back underneath it. The function of the rubber support feet is to isolate the
vibrations of the VBF from the rest of the equipment.
Figure 1.1: Vibratory Bowl Feeder

5
In order to maximize the feed rate of a VBF a number of factors are considered during its
design. Once a VBF is produced some of these factors become constant and must be treated
as such during the control algorithm development. The conveying velocity of a part moving
along the track of a VBF depends on the amplitude of the track vibration a0, the track
inclination angle θ, the angle between the track and its line of vibration ψ , the effective
coefficient of friction between the part and the track (both static µs, and dynamic µd), the total
mass of parts in the bowl [2,3], the vibration frequency of the bowl fb, the natural frequency
of the bowl fn [2,3,6], the stiffness of the leaf springs ks [7], the shape of the electromagnetic
and vibration waves [8,9], physical characteristics of the part, the position of the part within
the track, and the number, sequence and type of orienting devices.
1.3 Organization of Orienting Devices
In order to feed a part in a correct orientation a VBF is usually equipped with one or more
orienting devices that can be classified in many different manners. By one classification, the
orienting devices can be referred to as in-bowl tooling and out-of-bowl tooling. The
orienting devices used for in-bowl tooling are placed along the track of the bowl and can be
further divided into active and passive. The passive devices reject parts with certain incorrect
orientations by guiding them off the track so that they fall back into the bowl. This obviously
decreases the feed rate. An active orienting device reorients parts with incorrect orientations
thus keeping the feed rate high and minimizes potential damage to delicate parts. The out-of-
bowl tooling encompasses devices fitted between the output of a VBF and the presentation
point to the assembly robot. Usually, the out-of-bowl tooling is of the active type [3].

6
By another classification, orienting devices can be divided into the dimension orienting
devices and the feature orienting devices. While the dimension orienting devices use the
dimensional differences within the basic shape of a part to reject an incorrect orientation of
the part (e.g. wiper, dish-out in Figure 1.2a), the feature orienting devices utilize a certain
feature of the part to reject or reorient it (e.g. sloped track with retaining rail in Figure 1.2-b)
[10,11,12].
In this research, one more classification is also significant. The tools can be selective or non-
selective. The selective tools act on individual parts, and as such, they require sensors. For
example, an air jet sensor combination could be used as a selective tool. Each part is sensed
individually, and the determination is made if the part is in the correct orientation. If so, the
part is allowed to continue, otherwise it is blown back into the bowl. Due to the mode of
operation of the selective tools (sensing decision action for each individual part) they can
be made programmable, delivering a sequence of different parts/orientations, or adaptive
where the tools adjust to the changing environment, e.g. varying average speed of parts due to
the decreasing weight of the bowl with the parts in it. The non-selective tools act on a stream
of parts. There is no sensor to examine every individual part. For instance, an adjustable
wiper can be programmed for optimal throughput, but such a device is not suitable for
delivering a predetermined sequence of parts. Some of the orienting devices used with VBFs
are narrow track, slot wall, groove track, groove wall, rail track, rail wall, ledge, edge riser, edge
riser reversed, long step, normal step, cutout, silhouette track, silhouette wall, gap, through
beam, pressure break, wall projection, wall projection lip, low wall, wiper blade, scallop, air jet,
and hold down [3, 7, 13, 14, 15, 16].

7
Often a few of the orienting devices are applied sequentially in a single VBF to force the part
into required orientation [3, 7,10, 17]. Two typical tooling examples for a VBF are presented
in Figure 1.2[10]. In Figure 1.2-a, a flat rectangular part is oriented so that it lies on the
surface defined by its length (in the direction of travel) and its width. First, parts encounter
the wiper blade, which ensures that the parts passing underneath it are not stacked or
overlapping. In addition, the parts oriented so that their length or width is positioned
vertically against the wall are rejected. When the hold-down, acting as a part magazine and
dispenser, is filled, the parts encountering the pressure break will be returned to the bowl.
The pressure break also separates parts. The dish out is used to allow only the parts whose
length is against the wall to pass.
In Figure 1.2-b, a slotted part is reoriented so that it straddles the retaining rail. The functions
of the wiper, the pressure break, and the hold-down are the same as in the previous example.
The retaining rail combined with the inward track slope ensures that only the parts in the
correct orientation are delivered to the outlet of the bowl.
Automating the design of tool selection and sequencing for a VBF is an active research area.
An analysis of a particular sequence can be performed with respect to the efficiency for a
system of orienting devices by using approach in [3, 18]. Various knowledge-based
techniques were proposed in recent years for aiding or automating the design of VBFs [12,
13, 19]. Berkowitz and Canny [20, 21] used a near real-time impulse-based dynamic simulator
developed in [22, 23] for parts feeder design.

8
a
b
Retaining Rail
Dish-out
Flat Rectangular Part
Hold-down
Pressure Break Wiper
Slotted Part
Pressure Break
Wiper
Warp Starts
Retaining Rail
Hold-down
Figure 1.2: Typical Tooling Applications for a VBF
1.4 Part Reorientation
The work in this area uses either sensorless or sensor-based methods to reorient a part into a
desired orientation. Many sensorless solutions exist. By repeatedly tilting a tray with a part in

9
it, Erdman and Mason [24] were able to eliminate configuration uncertainty of the part. A
vibrating plate was used to position and orient parts in [25]. A sequence of fences placed
over a conveyor automatically oriented a sliding part [26]. A complete algorithm for
designing a sequence of passive curved fences to orient polygonal parts was developed in [27].
An active part manipulation system applying a sequence of fences to push parts at different
angles was implemented in [28]. It was based on a set of rules predicting the rotation
direction of pushed objects described in [29]. A system using a single, one degree of freedom
fence oriented parts on a conveyor [30]. A frictionless gripper oriented polygonal parts using
an algorithm to generate optimal orienting plans [31].
Sensor-based part reorientation was implemented by using a tilted tray and a tactile probe
[32]. Later, sensor-based orienting plans were generated automatically for tray tilting and
grasping by a parallel jaw [33]. Using a parallel-jaw gripper with polygonal parts, diameter
sensing part recognizability and orientability are defined [34]. A comparison of sensorless and
sensor-based orienting plans showed that simple sensors reduce the number of orienting
steps [35, 36].
1.5 Part Kinetics
The motion of a part in a VBF bowl with its accompanying dynamics is described
traditionally in literature [2, 3, 7, 17, 37]. The research aim is usually to increase the feed rate
for an existing VBF, or to design a VBF supporting higher feed rates. As the VBF model
input, the electromagnetic force of the vibrating element is used. In [7], this electromagnetic
force is modeled as a square wave with variable duty cycle. Later, the electromagnetic force is
modeled as a parabolic function [17]. Both of the two approaches are empirically based. An

10
analytical approach could model the electromagnetic force following a similar procedure as
demonstrated in [38].
1.6 Programmable VBFs Research
Cronshaw et al. [39] developed a flexible assembly module using a vibratory bowl feeder. The
feeder represents just the first tool used in orienting the part, which leaves the bowl in one of
its stable orientations. At the output of the feeder the part escapes onto a transferring belt
and when it reaches the end of the belt, a pusher moves it past an inspection station. The
station consists of a lamp, a prism to reflect light sideways onto the side wall of the track, two
thin lines of optical fibers embedded in the track (one across each wall) and a semiconductor
line scan camera. The image of the part is formed by rapid scans of the camera. The pusher
is used to ensure that the part travels at a constant speed while passing the inspection station.
The camera builds a 2D binary image. Next, a microcomputer, a DEC LSI11, analyzes the
image, decides whether the part is scrap or not, and whether it is in the correct orientation.
The system is programmed by using a TV screen and a light pen. Two ribbons of fiber optics
(for plane and side view) which share a single 256 x 1 CCD camera are used. The elements of
the linear camera can be allocated proportionally to the side and plane view.
The above flexible assembly module represents an early development of active selective
tooling coupled with a vision system. The in-bowl tooling is still inflexible and as such prone
to jamming. The price of the vision system used is prohibitive for wide spread use.
A Programmable Silhouette Recognizer (PSR) was developed at Pennsylvania State University
[12]. PSR represents a simple sensor system mounted in the bowl track at the outlet of the

11
bowl feeder. A grid formed by light sensors functions as a camera. A light source is placed
above the sensor grid. The system uses a small microcomputer to memorize and recognize
parts silhouettes. At the outlet of the bowl feeder, in the bowl wall, an air jet is mounted. Its
function is to return parts with incorrect orientations back into the bowl and to allow parts
with the correct orientation to pass by, and therefore to escape out of the feeder. The
light/dark information is converted into digital signals by 16 phototransistors. Each work-
piece is represented by a unique 16-bit digital pattern.
The use of an air jet represented an early implementation of passive, non-contact, selective,
in-bowl tooling for a VBF. The vision sensor, although simple and inexpensive, was well
suited for simple parts and orientations. The challenges the PSR system faced were low
throughput due to the use of a passive tool and the systems inability to deal with stacked,
overlapping or contiguous parts. In addition, only relatively simple part/configurations were
distinguishable.
At The Ohio State University [14,15], the PSR system was improved. One development
enabled the vibratory bowl feeder system to handle a sequence of different parts. This
sequential vision system uses an Intel 8085A-based microcomputer system to store and
recognize images, and to control the coil of the air valve. The system is capable of delivering
a programmed sequence of parts in prescribed orientations at the outlet of the bowl feeder.
An operator places a part on the window in the desired orientation, moves a mode switch to
READ mode and pushes a SET button. This allows the computer to store the parts
image in the image table in memory. Next, the timer information is stored in the timer table.

12
This information is needed to allow the computer to turn off the air jet so the correct part in
the correct orientation can safely pass. In addition, during this step, an identification number
is given to the part. After a few parts are entered into the computer memory using this
procedure, a desired sequence is keyed in. The sequence is generated from part identification
numbers. Finally, the mode switch is turned to RUN mode and feeding begins.
The advantages of the sequential vision system are that such a system can greatly reduce the
number of vibratory bowl feeders in a factory and/or increase the flexibility of the feeding
system. A disadvantage of such a system is lower throughput.
Further development of the PSR system involved a new computer based 3-D sensing strategy
and a faster 16-bit based single board computer system. Problems dealing with recognition of
contiguous and overlapping parts were solved. The part resolution was improved and the
speed of the recognition and decision making portion of the system was increased [16, 40,
41].
Figure 1.3 depicts a 3-D sensor-based programmable vibratory bowl feeder. A portion of the
bowl track near the end has been replaced with a transparent piece of Plexiglas holding eight
optical fibers. Another eight fibers are placed in the bowl wall. Two light sources generate
light of controlled intensity.
As a part moves by the sensor arrays, two silhouettes are recorded and compared with
previously stored silhouettes of correct part orientation. If they match, the air jet is turned off
and the part escapes from the bowl. Otherwise, the air jet returns the part back into the bowl.

13
Overlapping parts are easily detected with the vertical set of fiber sensors located in the bowl
wall.
Detecting contiguous parts and their orientation is accomplished algorithmically. Features of
the correct part/orientation are compared with the features of the part/orientation passing by
the sensors. When the last feature is detected the algorithm recognizes the correct
part/orientation and begins a new search for the first feature of the correct part/orientation.
When the first and the last feature of the part are similar, it is often not possible to detect
where one part ends and the other begins. The matter is further complicated by the changing
speed of parts due to the change in the total weight of parts in the bowl. The developed
algorithm deals successfully with both of the above problems.
Automatic programming of tooling and the adaptive control of a VBF is accomplished. The
operator starts the program and allows a single part in correct orientation to pass by the
sensor arrays. Part features and orientation are stored in memory, and the program starts its
control mode waiting for the next part. If that part is in the correct orientation it will pass by
the air jet, otherwise it will be blown back into the bowl.
The major drawback of this system is non-optimal throughput due to the use of an air jet as a
passive tool. Another drawback is somewhat limited sensor precision resulting from a small
number of fiber-optic cables.
The idea of programmable tools for adaptive vibratory bowl feeders was presented in [42].
The adaptively controlled parts feeder assumes headed parts and mechanical, passive, in-bowl
tooling adjustable by a computer. Based on some optimization strategy measurable by

14
sensors (e.g. throughput), an algorithm manipulates the tools so that the feeder performs
optimally under changing conditions. Such a system could be connected to the cell/factory
control unit to facilitate application of statistical process control.
There are a few performance issues dealing with mechanical in-bowl passive tools. When
mechanical in-bowl tools are used, parts can jam. In addition, mechanical passive tools, in
general, yield lower throughput then non-mechanical tools.
LIGHT SOURCE
LIGHT SOURCE
BOWL WALL
BOWLTRACK
WORKPIECE
PLEXIGLASS
OPTICAL FIBER SENSORS
AIR JET
FEEDING DIRECTION
Figure 1.3: Three-Dimensional Sensor-Based Vibratory Bowl Feeder

15
1.7 Research Objectives and Organization
In a VBF, the desired part orientation is obtained by the use of various orientation devices
along the track of the bowl. In order to feed a new part/orientation, a VBF must be taken
off-line and the bowl retooled. This is a relatively long, labor-intensive process requiring
skillful mechanics. For a VBF to be a viable option in low volume assembly processes it must
be able to reliably feed a number of parts/orientations without long downtimes for part
changes. The versatility would further increase if the inspection of part dimensions could be
added. VBFs equipped with mechanical barriers used as orientation devices, are prone to
jamming. This mode of failure requires availability of maintenance personnel, thus limiting
utilization of VBFs and their applications.
The objective of this project is to design, build, test, and analyze a vibratory bowl feeder
(VBF) equipped with a set of active programmable air-jet based tools, which could quickly
adjust for successful feeding of a particular part, and eliminate jamming. Such quick-adjusting
VBFs will be equipped with a micro-controller and a set of sensors for obtaining data to
control the in-bowl tooling and detect incorrect orientations. A set of active, in-bowl,
microprocessor-controlled tools will orient the parts and eliminate jamming, the leading cause
of VBF failures on the plant floor. The main emphasis of this research will be the
development of the fundamental mechanical models for these novel active tools.
A flow chart describing the operation of an adaptive VBF system using passive
programmable tooling is represented in Figure 1.4. At the start of the algorithm, the part
properties defining the part, such as geometry, weight, color, surface finish, and material, are
entered into the VBF control system. The algorithm compares the part with its part database.

16
If there is a match, an optimal orientation, sensing, and tooling sequence is implemented,
desired performance verified, and the VBF starts its production run.
If the part is not in the part database, the possible stable orientations are obtained, and their
probabilities calculated. Based on the available tools from the tool database, the algorithm
decides if it is possible to feed the part. If it is, the next test determines if it is possible to
sense the part so that it can be fed in at least one distinguishable orientation. After passing
the two tests, the algorithm maximizes throughput by selecting an optimal orientation, and
the sensing and tooling sequence for the part. Then the appropriate tools and sensors are
implemented and adjusted for optimal performance, and the VBF starts its production run.
An adaptive VBF system using air jets as active programmable tooling is represented in
Figure 1.5. The flowcharts for systems using active and passive tooling are similar. Two major
differences are the two tables: the tools - air jet equivalence table which does not exist in VBF
systems with passive non-air-jet tooling, and the part sensor tool sequence table that for
active air-jet based tools also includes pressure profiles.
In this manuscript, the hardware design issues concerning active and passive in-bowl
orientation devices based on air jets will be addressed. The computer control hardware will be
developed. The algorithms controlling the VBF equipped with a set of programmable
orientation devices based on derived mechanical models will be described. The results of
performed simulations with various air-jet based tools and parts will be presented.

17
part physical properties (geometry, weight,color, surface finish)
part in database ?
calculate possible orientations andtheir probabilities
Is it possible to feed ?
select optimalorientation, sensing
and tooling sequence
maximize throughput by selectingoptimal orientation, sensing and
tooling sequence
implementsensors/tools
adjust tools and run parts
Performance OK ?
start production
END
yes
no
no
yes
yesno
Is it possible to sense ?
sensor database
no
yes
part database
tool database
part, sensor, toolsequence table
START
Figure 1.4: Adaptive Control of a VBF Using Passive Tools

18
part physical properties(geometry, weight, size )
part in database ?
Is it possible to feed ?
select optimalorientation, sensing
and tooling sequence
maximize throughput by selectingoptimal orientation
adjust air-jets and runparts
Performance OK ?
start production
END
yes
no
no
yes
yes
no
Is it possible to sense ?
sensor database
no
yes
part databasetool database
part, sensors,air-jetsequence and pressure
profiles table
START
tools / air-jetequivalence
table
Figure 1.5: Adaptive Control of a VBF Using Active Tools

19
A number of tests with different parts/orientations will be performed and a comparison of
test and simulation results will be given. In the final chapter the research contributions will be
summarized, conclusions derived, and areas of further research indicated. The listing of the
program controlling air jets will be included in APPENDIX A, while APPENDIX B will
contain a number of experimental results.

20
Chapter 2
PART REORIENTATION BY AIR-JET BASED TOOLS
In order to design in-bowl tooling for a VBF the interaction between the tools and the parts
must be understood. In this chapter, after defining the air-jet based tools, an analysis of their
effect on the part motion is provided. First, a simple flat rectangular part with dimensional
properties such that length (L) > width (W)> height (H), is used. The complete kinetics of this
part is described. The equation terms are kept general, so the equations would be valid for
other, more complicated parts.
A mathematical model of the part behavior based on the mechanics of the part includes an
analysis of the parts resting positions, passive and active air jet tooling, and reorientation of
the part by the use of air-jet based tools. The issues with the tool models with respect to the
part motion along the track of the bowl are addressed. Next, the air jet force(s) needed to
reorient the part for different air-jet based tools are studied. Finally, conditions regarding the
parts final desired position/orientation are described.
2.1 Simple Flat Rectangular Part
Assuming all the surfaces of the part are indistinguishable among themselves (equal surface
finish and absence of identifiable surface features) the part can be in six possible positions on
the track in the bowl: a the surface LxW in contact with the track and LxH in contact with the

21
wall; b the surface LxW in contact with the track and WxH in contact with the wall; c the
surface LxH in contact with the track and LxW in contact with the wall; d the surface WxH in
contact with the track and WxL in contact with the wall; e the surface HxL in contact with the
track and HxW in contact with the wall; and f the surface HxW in contact with the track and
HxL in contact with the wall. The above stable positions are illustrated in Figure 2.1. For flat
parts, the orientations e and f are very unlikely to occur because the forces exerted by the bowl
will topple the part into another, more stable orientation. Depending on the geometry, the
most likely orientations are a and b. The tool designer could choose either of these two
orientations to appear at the end of the track. In order to maximize the feed rate the choice
would be the orientation b. For this part one may argue in favor of a passive or an active
selective orientation tool. If a passive tool is used somewhere early on the track the space
created when a part with incorrect orientation is rerouted back into the bowl may be reclaimed
by the parts behind it due to the difference in part velocities at the bottom and the top of the
bowl. However, this is a matter of chance. An active device reorients the part into the correct
orientation, so the feed rate does not depend on the speed difference of parts between the
bottom and the top of the bowl, nor the probability of a part being in a certain orientation. In
addition, an active device can be placed near the end of the track without any loss of efficiency.

22
BOWL WALL
ab
ce
f
Figure 2.1: Stable Resting Positions of a Simple Flat Rectangular Part in a VBF
2.2 Passive Air-jet Tooling
In this section, some traditional passive in-bowl tooling for rectangular parts and their air-jet
based equivalents are compared. The passive air-jet based tooling eliminates jamming during
the VBF operation. In addition, with appropriate control algorithms it is relatively easy to
adapt these devices for a family of parts, or even to feed a sequence of different parts.
A wiper blade, depicted in Figure 2.2-a, is a passive in-bowl device used frequently in VBF
designs. One of its functions is to reject stacked or overlapped parts. In addition, this tool is
capable of rejecting parts not laying flat on the track.

23
The major disadvantage of using a wiper blade is a possibility of parts jamming under it.
Another disadvantage of this tool is its inflexibility. If the part geometry is changed then the
bowl must be retooled.
In Figure 2.2-b an air-jet based equivalent to the wiper-blade tool is presented. The air jet
mounted in the bowl wall can be on all the time, thus rejecting all the parts passing by it. In
order to save air, it could be coupled with a sensor. When the sensor is triggered, the air jet
activates until the part setting off the sensor is cleared.
a
b
air jetoptional sensor
Figure 2.2: Wiper-blade and its Air-jet Equivalent

24
Parts travel along the track of the bowl with varying velocity. The velocity of parts is highest
at the bottom of the bowl and the lowest at the bowl outlet causing parts to push the ones
ahead. This effect may create part-feeding problems like jamming and overlapping. A
pressure break, described in Figure 2.3-a, is a passive tool allowing parts to separate from each
other. If the parts passing by this tool are not in single file, they will be rejected. In addition, if
a delivery chute mounted at the outlet of the bowl feeder is full, the congestion in it is avoided
by the use of a pressure break, which returns the excess parts back into the bowl [2]. All the
functions of a pressure break can be performed by an equivalent air jet based tool represented
in Figure 2.3-b. This tool would add flexibility to a VBF. However, the sensory inputs must
be placed in proper locations for appropriate function of the pressure break.
a
b
air jet
sensor
Figure 2.3: Pressure Break and its Air-jet Equivalent

25
When feeding a member of the rectangular family of parts it is possible to use a narrow track if
the desired part orientation is such that the longest side is against the bowl wall. A narrow
track depicted in Figure 2.4-a can be replaced by an air-jet equivalent presented in Figure 2.4-b.
The air jet will act on any part triggering the sensor. The sensor is positioned to detect only
the parts that are oriented with their width against the bowl wall.
a
b
air jet
sensor
Figure 2.4: Narrow Track and its Air-jet Equivalent
The in-bowl tool shown in Figure 2.5-a is a hold down. It is used to hold correctly oriented
parts until they are needed by the out-of-bowl tooling or assembly machines. Since the
starting orientation of a part is a random variable, the time it takes a part in a correct

26
orientation to appear at the bowls outlet is also a random variable. In general, the average
feed rate of a VBF is set to be slightly higher than needed by the devices using the parts. The
function of a hold down is to counteract the effects of a variable feeding time per part. An air
jet mounted in the bowl wall and angled down and towards the track, as depicted in Figure 2.5-
b, performs the same function as the hold down. When the machine using the parts is ready
for the next part, the air jet is turned off for a brief period allowing one part to get through.
a
b
air jet
Figure 2.5: Hold Down and its Air-jet Equivalent
For flat parts with more complicated shapes, a silhouette track, depicted in Figure 2.6-a, may
be a viable choice. Only parts in the correct orientation that fall through the cutout are

27
allowed to continue. All others are rerouted back into the bowl. An air-jet equivalent (Figure
2.6-b) consists of an air jet mounted in the bowl wall and a number of sensors placed in the
track. The sensors define the contour of the part (for the desired orientation), or its
distinguishing characteristics. An air-jet equivalent to silhouette track with programming
capabilities was developed at Pennsylvania State University [12].
a
b
air jet
sensors
Figure 2.6: Silhouette Track and its Air-jet Equivalent

28
A similar device to the silhouette track is the silhouette wall. The desired part orientation is
with the flat side against the bowl wall. The silhouette wall presented in Figure 2.7-a can be
replaced by an air jet and a number of sensors mounted in the side wall of a VBF. When a
part in the desired orientation passes by the sensors, the air jet is deactivated allowing it to
proceed. All other parts are blown back to the bottom of the bowl. An air-jet equivalent to
the silhouette wall with programming capabilities was implemented at The Ohio State
University [40].
a
b
air jet
sensors
Figure 2.7: Silhouette Wall and its Air-jet Equivalent

29
2.3 Active Air-jet Tooling
Instead of part rejection characterized by the passive tools, the active in-bowl tooling features
part reorientation of incorrectly oriented parts. The main benefit of the active tools is the
increase in the feed rate of the VBFs. An additional benefit is the less stressful handling of the
delicate parts (like pills in pharmaceutical industry), which have to traverse the track only once.
The advantages of the active air-jet based tooling over the mechanical barrier type are the ease
of programmatic adjustments and the elimination of jamming. Two typical active in-bowl
tools for reorienting rectangular parts are described, and then compared to their air-jet based
equivalents.
Figure 2.8-a represents an edge riser. It is an inclined plane mounted on the track of the bowl
feeder. If an incoming part has its flat side against the bowl wall, it will pass by this device
unaffected. If the parts orientation is such that its longest edge is against the bowl wall with
its largest surface laying on the track, it will be reoriented. In addition, depending on the
orientation of the incoming parts, an edge riser can be used as a passive tool. For instance, a
part entering an edge riser, oriented with its width against the bowl wall and the largest surface
on the track, may be rejected if the riser is installed adequately. An air-jet equivalent of an edge
riser is depicted In Figure 2.8-b. When a part is detected by an in-track sensor, two air jets
reorient the part. The configuration with two air jets should ensure a better-controlled
orientation process.

30
a
b
sensor
air jets
Figure 2.8: Edge Riser and its Air-jet Equivalent
An active in-bowl tool used to flip a part is a step. It is shown in Figure 2.9-a, with its air-jet
equivalent presented in Figure 2.9-b. Both tools rotate parts 180 degrees in the bowl wall
plane.

31
b
sensor
air jet
Figure 2.9: Step and its Air-jet Equivalent
2.4 Air-jet Based Tooling Equivalence Example
Figure 2.10 shows a set of air jet based active tools that can be used to replace a sequence of
mechanical tools. As rectangular parts encounter the wiper blade in Figure 2.10-a, the stacked
or overlapping parts are rejected. The air jet in Figure 2.10-b at the bottom performs the same
function. Its operation does not depend on sensing inputs, though its performance can be
verified by using a sensor array embedded in the track.
The narrow track discriminates between the length and width of a part. An air jet placed in the
track wall close to the track surface performs the same function. This, however, requires
sensor information to select the correct parts for rejection. Finally, a roll up (an active tool)

32
reorients parts to their final orientation. The same function is performed by an air jet placed in
the track of the bowl.
ROLL UP
NARROW TRACK
WIPER
AIR JET REPLACING ROLL UP
AIR JET REPLACING NARROW TRACKAIR JET REPLACING WIPER
BOWL WALL
BOWL WALL
BOWL TRACK
BOWL TRACK
a
b
FEEDING DIRECTION
Figure 2.10: Air-jet Based Tooling Equivalence Example

33
The benefits of the air-jet based equivalent set of tools are the shorter down time needed for
retooling and the elimination of jamming. The feed rate is the same in both cases. A further
improvement to the air-jet based system would be a replacement of the narrow track
equivalent with an active air-jet tool. The parts in an incorrect orientation would be reoriented,
not rejected to improve the feed rate.
2.5 Study of Air-Jet Forces
An air jet is utilized to rotate a rectangular part placed in a VBF as shown in Figure 2.11. The
air is the standard shop air, supplied from a constant air source consisting of a compressor, an
air tank and a filter-regulator-lubricator (FRL) unit.
air jet
bowl wall bowl track
from air valve
Figure 2.11: Air Jet Acting on a Rectangular Part

34
The air jet is a simple 1/8 open tube. Air jet and nozzle designs often employed in industry
are capable of saving up to 80% of the air consumption in comparison to the comparable
open tubes. In addition, nozzle manufacturers claim typical noise level reduction of about 10
dBA[43], which is of importance on the factory floor. The design of appropriate air jets and
nozzles for the air-jet based in-bowl tooling is left for future research.
The duration of the air-jet pulse is computer controlled by a solenoid-actuated air valve. In
this research, Humphreys 401 micro solenoid air valve [44] is used. The ANSI symbols and
drawing methods from [45, 46], result in the pneumatic schematic represented in Figure 2.12.
The valve is a 4 way, 5 port, 2 position, spring return valve, with a single solenoid and a non-
locking manual override.
to air jet
Figure 2.12: Humphreys 401 Micro Solenoid Air Valve

35
2.5.1 Relationship between Source Pressure and Air-jet Force
Since the value of the force the air jet is exerting on the part is required, and that force
depends on the line pressure, the pressure force relationship is obtained. In general, for a
pneumatic circuit and known source pressure, it is possible to apply empirical formulas to
obtain the pressure at the air-jet exit. The pressure losses in the system depend on the type of
the airflow (laminar or turbulent), and the type, number and length of frictional elements
(pipes, knees, bends, tees, valves, orifices, etc.). Once the elements of a pneumatic circuit are
specified, and its geometry finalized, the pressure loss in pipes can be calculated using Harris
formula [46]:
5
2
)( dCRcLQPf = 2-1
where Pf is the pressure drop due to friction, c an experimentally determined coefficient, L the
length of pipe, Q the flow rate of air under standard conditions, CR the compression ratio
(pressure in pipe divided by atmospheric pressure), and d the inside diameter of pipe. The
coefficient c depends on the inside pipe diameter and the surface finish. The fittings and
valves can be specified by their equivalent lengths, thus the frictional losses can be calculated
using Harris formula, as well.
The pneumatic system used in this study includes two custom-made couplers of unknown
equivalent lengths and unknown coefficients c. In order to obtain these parameters a set of
experiments should be performed. Even then, the errors compounded through the pneumatic

36
circuit could make the use of formula 2-1 imprecise. Therefore, a pressure force table is
experimentally obtained for the entire pneumatic circuit used in this study.
The experimental results are tabulated in Table 2.1, and shown graphically in Figure 2.13. By
feeding the experimental results into the regression analysis engine of MINITAB[47] the last
three columns of Table 2.1 are formed. The corresponding graphical representations of the
linear, quadratic and cubic regression results, including the comparisons with the experimental
data are depicted in Figure 2.14, Figure 2.15, and Figure 2.16, respectively.
Pressure (bars) Force (N) experiment experiment linear quad. cubic 0 0 -0.097403 0.007656 0.000509 1.38 0.03404 0.024385 0.027887 0.034168 2.07 0.06602 0.08528 0.056388 0.062777 2.76 0.101 0.146174 0.097146 0.101014 3.45 0.1452 0.207068 0.150161 0.150208 4.14 0.2134 0.267963 0.215433 0.21169 4.83 0.285 0.328857 0.292962 0.286789 5.52 0.3806 0.389751 0.382747 0.376838 6.21 0.4827 0.450646 0.48479 0.483165 6.9 0.6063 0.51154 0.599089 0.607102
Table 2.1: Pressure Force Table: Experimental and Regression Results

37
Fitting the experimental pressure force curve using the linear model can be used only for
preliminary calculations. The governing equation
0974034.00882526.0 −= PFa 2-2
is not a good fit since the estimated standard deviation about the regression line is 0.06206,
and the standard residual for the first observation is large, 2.05.
00.10.20.30.40.50.60.7
0 1 2 3 4 5 6 7
Pressure (bars)
Forc
e (N
)
Figure 2.13: Force vs. Pressure Curve for Experimental Air-jet System

38
-0.2-0.1
00.10.20.30.40.50.60.7
0 1 2 3 4 5 6 7
Pressure (bars)
Forc
e (N
)
linear experiment
Figure 2.14: Force vs. Pressure Curves Linear Regression Comparison
According to Figure 2.15, quadratic fit at 98% confidence level having the regression
equation
0076555.00031029.00128722.0 2 +−= PPFa 2-3
represents a very good fit. The estimated standard deviation about the regression line is
0.007143. However, as in the linear regression case, the standard residual for the first
observation is large (-2.27), indicating an unusual response.

39
00.10.20.30.40.50.60.7
0 1 2 3 4 5 6 7
Pressure (bars)
Forc
e (N
)
quadratic experiment
Figure 2.15: Force vs. Pressure Curves Quadratic Regression Comparison
It is possible to improve the regression model even more by fitting the data with a cubic
curve, as shown in Figure 2.16. There is little visible difference between the graphs in Figure
2.15 and Figure 2.16. The equation representing the cubic regression fit for the experimental
data is
0005086.00149375.00059188.0000675.0 23 +++= PPPFa . 2-4

40
In this case, the estimated standard deviation about the regression line is only 0.003082, all
standard residuals are within a norm, and the residual error is only 0.00006.
00.10.20.30.40.50.60.7
0 1 2 3 4 5 6 7
Pressure (bars)
Forc
e (N
)
cubic experiment
Figure 2.16: Force vs. Pressure Curves Cubic Regression Comparison
2.5.2 The Effect of Distance on Air-Jet Forces
During the reorientation process, the part moves away from the air jet. The distance the part
can be away from the jet is in the order of a few centimeters, that is, close to the track width.
A series of tests is performed to investigate the change of the jet force acting on the part with

41
respect to the parts distance from the air jet. Figure 2.17 gives a graphical representation of
the force distance relationship for different pressure source settings. The conclusion is: the
force of the air jet is relatively constant within the range of interest.
00.050.1
0.150.2
0.250.3
0.350.4
0.450.5
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Distance (cm)
Forc
e (N
)
Force @ 1.38 bars Force @ 2.07 barsForce @ 4.14 bars Force @ 6.76 bars
Figure 2.17: Force vs. Distance Curves for Various Pressures

42
2.5.3 Spatial Pressure Distribution of an Air Jet
The air expands as it leaves the nozzle. If the area of the part on which the air jet acts is too
small, a portion of the force of the air jet will miss the part, thus, it is important to measure the
spatial pressure distribution of the air jet. Five sets of experiments were performed directly
measuring the spatial pressure distribution for five different pressure settings. In order to keep
the results general (not influenced by a particular piping arrangement), instead of the pressure
the force measurements are recorded in APPENDIX B. Based on these results, for each
distance from the nozzle measurement, an area is identified where most of the energy of the
air is contained. The diameters of those areas are plotted against the distance from the nozzle,
as shown in Figure 2.18, resulting in the parameters of an air-jet cone for each force setting.
By averaging the results from all experiment sets, Figure 2.19 is obtained.

43
5 10 15 20 25 30 35 403
4
5
6
7
8
9
10
11
cone dia
meter (
mm)
distance from air jet (mm)
0.021 N
0.051 N
0.126 N
0.32 N 0.632 N
Figure 2.18: Air Cone Diameter vs. Distance from Nozzle
5 10 15 20 25 30 353
4
5
6
7
8
9
10
11
cone dia
meter (
mm)
distance from air jet (mm)
Figure 2.19: Average Air Cone Diameter vs. Distance from Nozzle

44
The linear regression method from MINITAB applied on the data in Figure 2.19 results in the
regression equation
dD 238.028.2 += , 2-5
where D is the cone diameter in millimeters, and d is the distance from the nozzle in
millimeters. The constant of 2.28 mm is actually the inner diameter of the air-jet nozzle. An
interesting observation is that the cone of the air-jet does not depend on the applied pressure,
at least for the range of interest.
The analysis of the spatial air-jet pressure distribution can be generalized and used in the part
geometry selection. Since the diameter of the pressure cone increases roughly at ¼ the rate of
the distance from the air-jet, the height of the part should not be less than ¼ of the parts
length for full air-jet force utilization.
2.5.4 Dynamic Behavior of an Air Jet
When the part to be reoriented is in position, a sensor sends the information to the computer.
The computer processes the information and sends a command to its output port. This
command, a voltage, is used to control the power to the solenoid actuating the directional air-
valve. Finally, the air-valve opens, firing the air jet. This process takes time and uses an
electro-mechanical analog device the solenoid actuated directional air-valve. The dynamic
processes involving electrical devices are much faster than the dynamic processes involving
mechanical devices, and as such, they are usually neglected. To obtain the behavior of an air

45
jet with respect to the time of the command pulse, a number of experiments are performed.
The experimental results are presented in APPENDIX B.
The tests are conducted by applying a sinusoidal, triangular, and square wave to the solenoid of
the air-valve, and measuring the pressure at the air jet output. A wave generator was utilized to
obtain different waveforms and to vary the frequency for the frequency analysis of the
pneumatic system. The pressure data from the air jet is measured by a pressure to voltage
sensor fed to a digital oscilloscope. The oscilloscope used is a Hewlett Packard 54600B, 100
MHz digital oscilloscope with an HP54658A serial/parallel measurement/storage module.
The data showing the excitation and the pressure sensor output is captured and entered into a
computer via a parallel port for further analysis. A communication program by HP,
DataScope 1.0 was utilized for uploading the information from the oscilloscope to the
computer.
An illustration of the dynamic behavior of the pneumatic system described in Chapter 4,
depicting the air-jet pressure response to the square wave excitation of 10 Hz, is given in
Figure 2.20. The response of the pneumatic system to the step input has a lag of about 10 ms,
rise time of about 10 ms, and has an overshoot close to 10%.
Using the same experimental setup, a number of experiments are performed to test the
frequency response of the air-valve for various source pressures. The results are presented in
APPENDIX B, Table 5.1. In the same set of experiments, the maximum excitation wave
frequency resulting in the switching of the air-valve is obtained. It is recorded as a function of
input pressure in Table 2.2.

46
00.20.40.60.8
11.21.41.61.8
2
0 0.05 0.1 0.15 0.2
time (s)
pres
sure
(bar
)
Figure 2.20: Air-jet Pressure Response to Step Pulse Excitation
Source Pressure Highest Switching Frequency Waveform (Hz)
(bars) square triangular sinusoidal 1.38 69.93 32.57 41.15 2.76 85.47 36.50 50.63 4.14 79.37 38.24 53.33
Table 2.2: Highest Frequency vs. Pressure Table for Humphreys 401 Directional Air-valve

47
When a VBF system with air-jet based tools is implemented, the minimum on-time is
measured. It ranges from 30 to 50 ms, depending on the position of the directional valve.
In order to minimize the effect of the bowl feeder electromagnet on the electronics circuitry
used, all the electronics are distanced from the VBF. A solenoid-actuated air valve supplies air
to the bowl via a plastic tube. The effect this 3.175 mm diameter tube has on the dynamic
behavior of the pneumatic system is studied. The tube length is varied and the pressure
response to the step input recorded. The results for pressures of 1.38 bars and 4.14 bars, and
tube lengths of 0.05, 1.5, 3.0, 4.5 and 6.0 meters are presented in APPENDIX B. It can be
concluded that even for the tube length of only 1.5 m the pressure rise time is about 25 ms.
Therefore, the tube length between the air-valve and the bowl wall should be minimized, or
included in the dynamic study of air-jet forces. In this research, the tube length (3.175 mm
tube) was 0.3 m, therefore its dynamic effects were not included in the model.
2.6 Study of Part Motion along the Track of the Bowl
Modeling of VBFs usually concerns an average speed of the parts traveling along the track.
While such models may deliver accurate results when the parts are sliding, their accuracy
suffers when the parts are hopping, and hopping produces the higher average part velocities.
Observing the actual part motion along the track of the bowl for various voltage amplitude
settings, the average velocities are obtained. From the measurements in Table 2.3, it is
concluded that the desired mode of part traveling is hopping for the feed-rate optimization,
since the maximum hopping velocity is about 2.5 times larger than the maximum sliding
velocity.

48
Experiment: velocity (m/s) part mode 1 2 3 4 average hop/slide
part 1 hop slide
0.149 0.057
0.135 0.059
0.128 0.059
0.159 0.057
0.143 0.058 2.453
part 3 hop slide
0.140 0.061
0.136 0.061
0.148 0.055
0.155 0.058
0.145 0.059 2.455
part 5 hop slide
0.139 0.069
0.140 0.071
0.142 0.068
0.159 0.072
0.145 0.070 2.073
part 11 hop slide
0.143 0.058
0.142 0.057
0.138 0.057
0.140 0.053
0.141 0.056 2.507
Table 2.3: Average Part Velocities (m/sec)
In order to apply active in-bowl devices a precise knowledge of parts position and velocity are
required. These were not achievable for a hopping part.
To obtain the precise knowledge of the phenomena related to the hopping of parts in a VBF,
the hopping motion is observed with an ultra high-speed camera. The KODAK EKTAPRO
HS Motion Analyzer, Model 4540 [48] is a video recording system capable of recording at
speeds of up to 40,500 frames per second. The images are obtained by a 256 x 256 element
sensor with 256 levels of gray. The storage capacity of the system used in this research is 1024
frames. Once captured, the images are stored on an S-VHS tape by using a Panasonic S-VHS
VCR, Model AG-1980P. In addition, the images are stored in the computer using the
KODAK EKTAPRO Digital Download Interface. This interface consists of a GUI running

49
on a computer equipped with a GPIB card (IEEE-488 bus), a GPIB cable, and a
complementary GPIB card in the Motion Analyzer. Using the Digital Download Interface
GUI the high-speed camera can be controlled, and images transferred to or viewed on the PC.
The transferred images are stored as 64KB uncompressed bitmap TIF Image Documents.
Observations have shown that while the part is hopping, the elastic forces between the part
and the bowl cause erratic part behavior. The time during which the part and the bowl are in
contact is short because the part often bounces off the track. In addition, the contact is often
made by only one of the vertices of the part, since the part is subject to rotation while in the
air. Figure 2.21 represents the front view of the part obtained by the high-speed camera
positioned close to the center of the bowl. It illustrates the erratic behavior of a near-
rectangular plastic part while hopping.
The sequence of 6 frames shown in Figure 2.21 presents every 50th image of the recording
performed at 4500 frames per second. The speed regulator for the VBF was set to the
maximum to insure hopping. In the time domain, the frames in Figure 2.21 are 0.011 seconds
apart. In Figure 2.21-a, the part is in contact with the track with only its trailing edge. In the
next frame, the contact point is at the front of the part. After bouncing off the track, the part
is rotating about its longest axis as depicted in Figure 2.21-c and Figure 2.21-d.
The velocity of the part hopping by an air-jet based tool is difficult to predict. Actually, neither
the velocity direction nor its magnitude is constant. At certain time intervals, the part doesnt
move forward with respect to the bowl wall, as depicted in Figure 2.21-e and Figure 2.21-f.
The parts path is helical. However, the radius of the bowl may be considered large with

50
respect to the part dimensions. In addition, the magnitude of the part velocity changes in time
depending on the part position within the bowl (due to the changing radius of the track), and
depending on the cyclical nature of the forces of the bowl acting on the part, causing the part
to hop.
In order to measure position and velocity precisely, the part should be either stopped or
sliding. By stopping the VBF, a part passing by the air jet is stopped as well, and only its
position needs to be measured. Then, a correct air-jet force pulse of the appropriate duration
can be applied, and the part reoriented according to one of the models derived below.

51
1
contact point
1
contact point
a b
1
raised edge
1
raised edge
contact point
c d
1 1
e f
Figure 2.21: Part Hopping along the Bowl Track Obtained by High-speed Camera

52
2.7 Reorienting Parts in the Track Plane
2.7.1 Reorienting a Simple Rectangular Prism
For a part on the track in orientation a in Figure 2.22, an active device would reorient the part
to orientation b. The orienting device must exert a force on the parts passing it. The device
could be used as a passive device if the reorientation was unsuccessful. In this mode, the parts
would be returned to the bottom of the bowl.
As depicted in Figure 2.22, r1 is the radial distance from the center of the bowl to the center of
gravity of the part in orientation a. XYZ is a coordinate system tied to the center of the bowl,
with the X-axis toward the part center of gravity and the Z-axis up and normal to the track.
The part coordinate system xyz, has the origin placed in the part center of gravity. At time
t=0, the x-axis of the part coordinate system matches the X-axis of the bowl coordinate
system, the y-axis is in the direction of part travel and the z-axis matches the Z-axis of the bowl
coordinate system.

53
r1
BOWL CENTER
BOWL TRACK
BOWL W
ALL
AIR JET
a
b
a
b
X
YZ
x
yz
Figure 2.22: Part Kinematics in 2-D, Plane View of Track
When the part is reoriented into orientation b its center of gravity has traveled an angular
distance of 0° with respect to the bowl coordinate system, while traveling an optimum distance
s in X direction, 0 in Y direction, and rotating θ = 90° CCW around the z-axis of the part
coordinate system. If the origin of the part coordinate system can be represented in the bowl
coordinate system by a vector [r1, 0, 0, 1]T, then its final position/orientation is obtained from
the transformations below and using nomenclature in [49]:
Trstranslzrotcoordnew ]1,0,0,[)]1,0,0,([)]2
,([]_[ 1⋅−⋅= π 2-6
where

54
−=
10
0
]_[ 1 srcoordnew 2-7
−
=−
100001000010
001
)]1,0,0,([
s
stransl 2-8
−
=
1000010000010010
)]2
,([ πzrot 2-9
Note, the order of transformations assumes translation first and then rotation.
The analysis of the reorientation process will start with a crude model, and then the
assumptions made will be justified or rejected depending on the results of simulations. In the
first approximation, the following will be neglected: the curvature of the bowl, the three-
dimensional nature of the model, and the friction forces exerted on the part from the bowl
wall. The curvature of the bowl is neglected because the maximum length of the part that can
be fed is much smaller than the circumference of the bowl. The 3-D nature of the part motion
is neglected because the track inclination angle is small. A VBF with a flat track is assumed in
this first approximation. The friction forces exerted on the part from the bowl wall are
assumed small since the wall is often rather smooth, and during the reorientation process the
bowl is not vibrating.

55
According to the parts geometry shown in Figure 2.23, for a successful part reorientation of
90º, the minimum displacement of the parts center of gravity s is equal to
2
22 wwls −+= 2-10
When needed in higher level programming tasks, the origin of the part coordinate system can
be represented in the bowl coordinate system by a vector, and its final position/orientation can
be obtained from the transformation matrices.
The pulse of air from the air jet orients and repositions the part a distance of about
2/)( 22 lwl −+ away from the bowl wall. The centrifugal force exerted by the VBF then
moves the part back into contact with the wall.
Knowing the part geometry, the minimal part displacement needed for a successful rotation of
90° can be calculated. For example, for given parts length l = 1 cm and the width w = 0.5 cm,
the minimal trajectory s is 0.309 cm.
If the air jet exerts too large of a force on the part, then there is an additional radial component
in the center of gravity path equation. If this component places the center of gravity beyond
the inner edge of the bowl track, the part would be returned back to the bowl. In addition, too
large of a force exerted by the air jet may cause over-rotation of a part that results in an
incorrect orientation.

56
c.g.
θα
x
y
l wv1
v2
BOWL WALL
v1
BOWL TRACK
Figure 2.23: Simplified Snapshot of Part Position/Orientation
From Figure 2.23, if the point A is to stay in contact with the bowl wall and move along the x-
axis, the following condition should be satisfied
)cos(21 θα += vv 2-11
Where,
)arctan(lw=α 2-12

57
and θ is the angle of rotation about the center of gravity. Observing the free body diagram in
Figure 2.24, we can sum the forces in y direction, and sum the torques with respect to the
center of gravity.
c.g.
θα
x
y
l w
FwBOWL WALL
Fa
ω
BOWL TRACK
a
Figure 2.24: Free Body Diagram for a Rectangular Part
It follows,
mamgFFF way =−+= µ 2-13
ωµ ImgllFlFT wacg =−−= 231. . 2-14

58
In the above equations Fa is the force of the air jet, Fw the reactive force exerted by the bowl
wall on the part, m the mass of the part, and µ is the coefficient of friction between the part
and the bowl track. Ideally, the torque arm for the force of the air jet is
21 ll = . 2-15
In order to deliver maximum thrust, the entire air jet must be engaged resulting in
rll −= 21 . 2-16
where r is the inner radius of the air-jet nozzle. The equivalent torque arm for the friction
torque,
dxdyyxlw
dArA
l
w
w
l
lAc
c c
− −
+=⋅=2
2
2
2
222
11 2-17
(Ac is the parts contact area with the track), is obtained by first finding the friction torque arm
for a small mass, and then integrating it to encompass the whole part. A closed form solution
for the double integral in the above equation is difficult to obtain analytically, thus it is
evaluated numerically. For example, for a part given by l =1 unit and w = 0.5 units, l2 = 0.2966
units. The torque arm for the force exerted on the part by the bowl wall is
)cos(2
22
3 θα ++= wll 2-18

59
and the moment of inertia for the part (with respect to the center of gravity) is
)(12
222 wlmdVrIV
+=⋅⋅= ρ 2-19
where ρ is the parts mass density, V the parts volume and r the distance to the infinitesimal
volume dV. An air jet placed in the bowl wall can be used to rotate a rectangular part in the
plane of the bowl track for π/2, π or 3π/2 from its initial orientation. In addition, it is not
even necessary to precisely rotate the part in one of these orientations. When the VBF is
restarted, it will push the part against the bowl wall (due to centrifugal force generated) and
therefore perform its final reorientation. The rotation angle θ must be within the limits
expressed in Table 2.4. The limiting conditions required for a rotation of π/2 radians are
depicted in Figure 2.25, for π radians in Figure 2.26, and for 3π/2 radians in Figure 2.27.
Required rotation minθ maxθ
2π )(tanarc
2 lw−π )(tanarc
2 lw+π
π )(tanarc2 l
w+π )(tanarc2
3lw−π
23π )(tanarc
23
lw−π )(arctan
23
lw+π
Table 2.4: Boundary Conditions for Part Rotation Angle θ

60
l
w
α
BOWL WALL
BOWL TRACK
l
w
α
ω ω
Figure 2.25: Boundary Conditions for π/2 Radians Rotation
BOWL WALL
BOWL TRACK
l
w
α
l
w
α
ωω
Figure 2.26: Boundary Conditions for π Radians Rotation

61
BOWL WALL
BOWL TRACK
l
w
α
l
w
α
ω ω
Figure 2.27: Boundary Conditions for 3π/2 Radians Rotation
A computer model of the part motion can be obtained by using equations 2-13 and 2-14,
condition 2-11, geometric conditions and applying differential calculus. In Chapter 3, the
model, its justification and the results of the simulation for various VBF part device
characteristics will be presented.
2.8 Reorienting Parts in the Bowl Wall Plane
When orienting the part in Figure 2.1 from orientation a to orientation e, or from orientation b
to orientation f, it is necessary to apply a force acting from the bowl track upward. An air jet
acting perpendicularly to the track generates the necessary force, as depicted in Figure 2.28.

62
air jet
bowl wall bowl track
from air valve
Figure 2.28: An Air Jet Reorienting a Part in the Plane Normal to the Track
For a flat track (tilt angle equal zero), neglecting the track incline angle, and according to the
part free body diagram in Figure 2.29, the kinetic equations are:
smmgFFF taz =−+= 2-20
θµ IlFlFlFT ttacg =−−= 431. 2-21
3ls θ = . 2-22
Where,
21 ll = 2-23

63
222 hld += 2-24
)cos(2
23 θα +=
dl 2-25
)sin(2
24 θα +=
dl 2-26
)arctan(lh=α . 2-27
c.g.
θ
α
x
z
l
h
Ft
Fa
ω
BOWL TRACK
a
µFt
d2
BOWL WALL
Figure 2.29: Reorienting a Part in the Bowl Wall Plane, Side View

64
In the above equations and Figure 2.29, the moment of inertia for the part is
)(12
22 hlmI += . 2-28
Fa is the force of the air jet, Ft the reactive force exerted by the track on the part, m the mass of
the part, µ the coefficient of friction between the part and the bowl track, s the displacement
of the center of gravity, a the linear acceleration in z, ω the angular velocity about the center
of gravity, and θ is the angle of rotation about the center of gravity.
An air jet placed in the bowl track can be used to rotate a rectangular part in the plane
perpendicular to the bowl track π/2, π or 3π/2 radians from its initial orientation. As in
section 2.7, it is not necessary to precisely rotate the part in one of these orientations; gravity
performs the final reorientation of the part.
During the reorientation, a part may spend a part of its motion in the air, depending on the
parts upward velocity. Then, the reactive force Ft is zero and the linear and the angular
accelerations are:
gs −= 2-29
and
IlFa 1=θ . 2-30
The results of the above analysis will be used as a starting point in a computer model
development undertaken in Section 3.3.

65
2.9 Reorienting Parts in the Plane Orthogonal to the Track and the Wall Plane
The air-jet based tool used to reorient parts in the plane orthogonal to the track and the wall
plane is depicted in Figure 2.30. Its function is similar to the tool in the previous section
except that the analysis is limited to the rotation angle of π/2 radians. Furthermore, in the
equations describing the motion, there are additional constraints caused by the bowl wall
reactive forces exerted on the part.
air jet
bowl wallbowl track
from air valve
Figure 2.30: An Air Jet Reorienting a Part in the Plane Normal to the Track and the Wall
Using as an example a rectangular prism whose free body diagram is visualized in Figure 2.31,
a set of dynamics equations are presented. These are
xmmaFFF xwttx ==+−= µ 2-31

66
zmmamgFFFF zatwwz ==−++= µ 2-32
and
=++−+−= θµµ IlFllFllFT attwwcg 14325 )()( 2-33
where
xwl −=21 2-34
)cos(2
sin 32 θαθ ++=
dhl 2-35
223 whd += 2-36
)(arctanwh=α 2-37
)cos(2
33 θα +=
dl 2-38
)sin(2
34 θα +=
dl 2-39
45 )cos( lhl −= θ . 2-40

67
c.g.
θα
z
w
h
Ft
Fa
ω
BOWL TRACK
az
µt tF
d3
BO
WL W
ALL
Fwµw wF
x
Figure 2.31: Reorienting a Part in the Plane Normal to the Track and the Wall, Side View
In the above equations and Figure 2.31, the parts moment of inertia is
)(12
22 whmI += . 2-41
Fa is the force of the air jet, Ft the reactive force exerted by the track on the part, Fw the
reactive force exerted by the bowl wall on the part, m the mass of the part, µt the coefficient of
friction between the part and the bowl track, µw the coefficient of friction between the part and
the bowl wall, x the displacement of the center of gravity in the x direction, z the displacement
of the center of gravity in the z direction, ax )(x the linear acceleration in x, az )(z the linear

68
acceleration in z, θ the angular acceleration about the center of gravity, ω the angular velocity
about the center of gravity, and θ is the angle of rotation about the center of gravity.
Equations 2-31 and 2-32 describe forces in the x and z directions, while equation 2-33
represents the sum of torques about the parts center of gravity. In addition, two kinematics
equations,
4lx θ = 2-42
and
3lz θ = 2-43
relate angular and linear accelerations while the part is in contact with the bowl. While in the
air, the parts equations of motion reduce to
0=x 2-44
gz −= 2-45
IlFa 1=θ , 2-46
very similar to the analysis in Section 2.8. The equations of motion stated above will be used
in the development of a computer simulation model described in Section 3.4.

69
Chapter 3
COMPUTER MODELS AND SIMULATIONS
The computer simulation will provide pressure time pulse tables for various air-jet based
tools and a range of part geometries, weights, materials, and bowl characteristics. In addition,
a performance analysis of air-jet based tools for different process variables will be conducted.
Based on the simulation results, reorienting air-jet forces will be adjusted and experiments
conducted.
3.1 Model for Part Reorientation in the Plane of the Bowl Track
3.1.1 Simple Model
The simple mathematical model in 2-D described by equations 2-13 and 2-14 and the starting
conditions described in equation 2-11 are used as a basis for the computer model. The air jet
force is chosen as the input to the VBF system while the path and the rotation angle are
chosen as the system outputs. Since this system is non-linear, the state-space method is not
used even though MATLAB is employed as the main simulation tool.
Equation 2-13 can be rewritten as
mmgFFs wa µ−+
= 3-1
and the equation 2-14 as

70
ImgllFlF wa 231 µθ −−
= , 3-2
where sa = and θω = . According to Figure 2.23
dtddv 12 θ= 3-3
where
221 wld += 3-4
and
dtsdv =1 3-5
and extending the equation 2-11 to
12 )cos( dvdv =+θα 3-6
with substitutions 3-3 and 3-5
dtsdtd =+ )cos(
21 θαθ . 3-7
Canceling dt from both sides and substituting equations 3-1 and 3-2 into 3-7, both
accelerations are eliminated. Solving for Fw the following is obtained:

71
23
321 )()(mlI
ImgFmlmgllFF aa
w +−−−
=µµ
. 3-8
At the start of the simulation, the initial conditions given in Table 3.1 are applied and Fw is
calculated. Knowing Fw at each iteration step both accelerations are calculated according to
Equations 3-1 and 3-2.
variable initial value θ 0
θ 0 si 0
is 0 l1 l/2
Table 3.1: Simulation - Initial Conditions for 2-D Model
Then, at each iteration step i , the variables describing the parts motion are calculated as
tiii ∆+= − θθθ 1 3-9
2
2
1
tt iiii
∆+∆+= −
θθθθ
3-10

72
tsss iii ∆+= − 1 3-11
2
2
1tstsss i
iii∆
+∆+= −
3-12
where ∆t is the time duration of each iteration step.
The above model is subject to a number of conditions presented in Table 3.2. When the part
stops rotating, the friction force due to the part rotation is equal to zero, resulting in
substitution 0=mgIµ for 0=θ in Equation 3-8. When the parts linear motion ends, the
friction due to the translation of the part is equal to zero, 02 =mglµ for 0=s in Equation 3-
8. When the part leaves the bowl wall, the reaction force of the bowl wall acting on the part is
equal to zero. In an ideal case, this happens when the part has rotated so far that its diagonal
and the bowl wall make an angle of π/2 (Fw = 0 for 2πθα >+ ). In addition, Fw is equal to
zero when the part stops rotating.
The air jet will stop acting on the part when either the air jet step time expires or the part
rotates so far that the air jet has no contact points with the part. A mathematical description
of the condition when the part rotates out of the reach of the air jet can be derived according
to Figure 3.1.
The rectangle illustrated by dashed lines represents the initial position of the part. Since only
the rotation is of concern here, the parts initial and final position are interposed so that their
centers of gravity are aligned.

73
Condition Effect
0=θ 0=mgIµ
0=wF
0=s 02 =mglµ
2πθα >+ 0=wF
event time > air-jet step time 0=aF
2)cos(
2cos
22 lwll <++− θαθ
or
)(tanarc)(tanarc2 w
llw −+> πθ
0=aF
Table 3.2: Model Boundary Conditions
l
w
θ
α
x
y
BOWL WALLFa
ω
BOWL TRACK
A
B
Cβ
Figure 3.1: Extent of Air Jet Action on Part

74
Observing the triangle ABC, the following relations are inferred:
)(tanarcwl=+ βα 3-13
βπθ −>2
3-14
and from 2-11, 3-13 and 3-14
)(tanarc)(rctana2 w
llw −+> πθ . 3-15
The above expression works well with the precise knowledge of the position of the air jet with
respect to the part. Otherwise, Equation 3-16
2)cos(
2cos
22 lwll <++− θαθ 3-16
is easier to adjust (adding an offset to the left side of the inequality) in case the parts initial
position with respect to the air jet differs from the ideal.
3.1.2 Simulation Example using MATLAB
Based on the model equations in Section 3.1.1 and some rudimentary knowledge of numerical
methods applied to MATLAB [50], a simulation program is written as a MATLAB script M-
file [51, 52]. The part and the process characteristics used in one of the simulations are
obtained from the physical measurements, described in Table 3.3. The figures explaining the
part motion are the results of the simulation for the force of air jet of 0.0204 N, the coefficient
of friction µ=0.29 and the air jet duration time ∆t=130 ms.

75
The diagram in Figure 3.2 represents Fw(t), the force the bowl wall exerts on the part during
the observation period. In this example, the air jet acted on the part even after the part was
separated from the bowl wall. The part-wall separation occurred at about 120 ms from the
beginning of the motion.
Part length 3.4 cm Part width 2.1 cm Part height 1.2 cm Part mass 5.91 g Coefficient of friction: wood on Plexiglas 0.25 0.35 Minimal displacement 0.95 cm
Table 3.3: Part and Process Characteristics

76
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
1
2
3
4
5
6x 10
-3
Time in seconds
Fw
(N)
part leaves bowl wall
Figure 3.2: Timing Diagram of the Force the Bowl Wall Exerts on the Part
The graph in Figure 3.3 illustrates Fa(t), the force of the air jet acting on the part. In this case,
the air jet exerts the force on the part during the entire interval the air-jets directional valve is
actuated. The air-jet force is modeled as a rectangular pulse.

77
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.005
0.01
0.015
0.02
0.025
Time in seconds
Fa (
N)
Figure 3.3: Timing Diagram of the Air Jet Force Exerted on the Part
During the reorientation process, the parts center of gravity moves in a straight line
perpendicular to the bowl wall. The timing diagram of this motion is described in Figure 3.4.
The path length of the center of gravity is 2.0 cm, which is larger than the minimal required
force path length of 0.95 cm.
The timing diagram of the parts angular displacement is shown in Figure 3.5. In this example,
the total rotation of the part was 1.3738 radians, which was well within the limits for a
successful part reorientation of 90°.

78
The linear velocity of the parts center of gravity as a function of time is presented in Figure
3.6. After the part leaves the bowl wall, the slope of the velocity decreases. The part stopped
at about 195 ms from the beginning of the motion.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.005
0.01
0.015
0.02
0.025
Time in seconds
S (
m)
Figure 3.4: Timing Diagram of the Parts Linear Displacement

79
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.2
0.4
0.6
0.8
1
1.2
1.4
Time in seconds
theta (rad)
Figure 3.5: Timing Diagram of the Parts Angular Displacement
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Time in seconds
Vel (
m/s)
air stopped acting on part
part leaves bowl wall
Figure 3.6: Timing Diagram of the Parts Linear Velocity

80
The parts angular velocity is depicted in Figure 3.7. Comparison of Figure 3.6 and Figure 3.7
shows that the rotation lasts longer than the translation.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4
6
8
10
12
14
16
Time in seconds
omega (rad/s)
air stopped acting on part
part leaves bowl wall
Figure 3.7:Timing Diagram of the Parts Angular Velocity
The linear acceleration of the parts center of gravity as a function of time is illustrated in
Figure 3.8. As the part moves closer to the point of separation from the bowl wall, its linear
acceleration decreases. After the part leaves the bowl wall, it is a subject to a constant linear
acceleration for the duration of the air jet. Note that the parts center of gravity moves at a
higher acceleration when the part is in the contact with the bowl wall than otherwise.

81
The timing diagram of the parts angular acceleration is depicted in Figure 3.9. As the part
approaches the separation point from the bowl wall, the angular acceleration increases. After
the part leaves the bowl wall, it rotates at the maximum constant angular acceleration for the
duration of the air jet.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Time in seconds
accel (m/s*s)
air stopped acting on part
part leaves bowl wall end of translation
Figure 3.8:Timing Diagram of the Parts Linear Acceleration

82
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-250
-200
-150
-100
-50
0
50
100
150
200
250
Time in seconds
omega dot (rad/s*s)
air stopped acting on part
part leaves bowl wall
end of rotation
Figure 3.9:Timing Diagram of the Parts Angular Acceleration
3.1.3 Effect of the Track Tilt Angle on the Part Reorientation in the Track Plane
A number of track types with various angles and cross-sections are used in VBFs. Depending
on the value of the angle of the track with respect to the horizontal plane (the track tilt angle τ
in Figure 3.10), VBF tracks can be classified as: flat (τ=0), positive (τ > 0, a positive slope of
the track with respect to the horizontal plane), and negative (τ < 0, a negative slope). In
practice, for applications involving flat rectangular parts the value of the track angle is no larger
than a few degrees. This allows a simple change in the existing model to include the effects of
the track angle. (For the part in Table 3.3, even for the track angle as large as 10° the
projection of the center of gravity onto the track plane is less than 10% away from its position

83
for the flat track.) The gravity force acting on the part can be decomposed into two forces: the
force normal to the track that is used in frictional terms, and the force along the track plane
acting towards the bowl wall.
τπ/2
bowl wall
bowl track
air jetfrom air valve x
y
z
Fa
Fw
mg
Figure 3.10:Track Tilt Angle
The assumptions above result in the appropriate changes to the force/torque equations 2-13,
and 2-14, respectively:
mamgmgFFF way =−−+= )sin()cos( ττµ 3-17
ωτµ ImgllFlFT wacg =−−= )cos(231. . 3-18
Solving 3-17 and 3-18 for Fw (using the same procedure as in 3.1) results in

84
23
321 ))sin()cos(())cos((mlI
mgmgFImlmgllFF aa
w +−−−−
=ττµτµ
3-19
The equations, adjusted for the track angle, used to calculate the angular and the linear
acceleration while the part is in contact with the bowl wall are:
ImgllFlF wa )cos(231 τµθ −−
= 3-20
θ 3ls = 3-21
and when the part leaves the bowl wall
ImgllFa )cos(21 τµθ −
= 3-22
until the part stops rotating (ω = 0), and/or
mmgFs a ))sin()cos(( ττµ +−
= 3-23
until the parts linear motion ends.
Based on the above equations, a new computer model is derived and simulations performed
using the parameters in 3.1.2. By varying the track tilt angle from 10° to 10° in simulations,
the curve in Figure 3.11 representing the displacement of the parts center of gravity as a
function of the track tilt angle is generated. Under the same conditions, the curve in Figure

85
3.12 displaying the total angle of rotation with respect to the track tilt angle is obtained. For
the track tilt angle of 5.7° (0.0995 radians), which is the measured angle of the experimental
VBF, the total rotation angle and the center of gravity displacement are: θ = 0.6382 radians,
and s = 1.16 cm, yielding an unsuccessful reorientation. To achieve a rotation similar to the
one in the simulation with the flat track (1.37 radians), the duration of the air-pulse was
increased to 166 ms, resulting in θ = 1.3648 radians, and s = 1.65 cm. In conclusion, when
compared to the flat track model, the sloped track model results in a displacement of the
center of gravity that is much closer to the experimental results. The 5.7° track tilt angle in the
experimental VBF cannot be neglected.
-10 -8 -6 -4 -2 0 2 4 6 8 100
0.01
0.02
0.03
0.04
0.05
0.06
track tilt angle (deg)
path (m)
Figure 3.11: Displacement of Parts c.g. as a Function of Track Tilt Angle

86
-10 -8 -6 -4 -2 0 2 4 6 8 100.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
track tilt angle (deg)
rotation angle (rad)
Figure 3.12: Total Angle of Rotation as a Function of Track Tilt Angle
3.1.4 Effect of the Wall Friction on the Part Reorientation in the Track Plane
The assumption that the bowl wall friction can be neglected in the part reorientation model is
examined next. The equations describing the parts kinetics differ from the section 3.1.3 by
having an extra friction term in the torque equation. For the friction coefficient between the
bowl wall and the part, µw, the torque equation is
ωτµθαµ ImgldlFlFT wwacg =−++−= )cos())sin(2
( 21
31. , 3-24
resulting in

87
))sin(2
(
))sin()cos(())cos((1
33
321
θαµ
ττµτµ
+++
−−−−=
dlmlI
mgmgFImlmgllFF
w
aaw , 3-25
and while the part is in contact with the bowl wall
I
mgldlFlF wwa )cos())sin(2
( 21
31 τµθαµθ
−++−= . 3-26
Based on the above equations the model in Section 3.1.3 was augmented to include the effects
of the wall friction. To prove or disapprove the necessity for this more complex model a
number of simulation sets were performed. In each set, the friction coefficient µw was varied
from 0 to 1 in increments of 0.01, and the corresponding results of each simulation (the total
rotation angle about the center of gravity and the total displacement of the parts center of
gravity perpendicular to the bowl wall) were recorded.
Simulation results for a part with a simple geometry, the rectangular wooden prism described
in Table 3.5, are depicted in Figure 3.13 and Figure 3.14. In all these simulations, 7 sets with
100 simulations per set, the force of the air jet was kept constant while the duration of the air-
jet pulse was varied from set to set (120 ms to 180 ms in 10 ms increments). In order to
compare the simulation result differences between the simulation sets, for each set the parts
total angle of rotation and the total displacement from the bowl wall were normalized. The
reference (nominal) values for each set of simulations satisfied:
1)0( == refw θµθ 3-27

88
1)0( == refw ss µ . 3-28
From the behavior of the normalized total displacement of the parts center of gravity with
respect to the wall coefficient of friction (depicted in Figure 3.13), it can be concluded that the
wall coefficient of friction cannot be neglected in the parts dynamics. The displacement
reduces to up to 50% of its nominal frictionless value. According to Figure 3.14, the effect of
µw on the parts angle of rotation is even more critical. It may result in over a 60% decrease
when compared to its nominal frictionless value.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.5
0.6
0.7
0.8
0.9
1
1.1
1.2
wall coefficient of friction
normalized displacement
120 ms
130 ms
140 ms
150 ms
160 ms
170 ms
180 ms
Figure 3.13: Displacement of Parts c.g. as a Function of the Wall Coefficient of Friction

89
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
wall coefficient of friction
normalized angle of rotation
120 ms
130 ms
140 ms 150 ms 160 ms
170 ms 180 ms
Figure 3.14: Total Angle of Rotation as a Function of the Wall Coefficient of Friction
3.2 Model Implementation Issues
The model derived in the previous section is valid for parts whose initial positions are precisely
defined. Each part is placed against the bowl wall, and an edge of the part is aligned with the
direction of the air jet. It is assumed that when the computer detects a part and stops the
VBF, every part stops precisely in this desired position.
During numerous experiments with various vibration amplitude settings of the VBF, it was
observed that parts do not stop at the same place every time. The power to the feeder is
switched off when a part is detected by the optical sensor positioned in the track, however, the

90
part does not come to rest precisely in the desired position relative to the jet repeatedly from
trial to trial.
As an example, the summary of the test results for the wooden rectangular prism described in
Table 3.3 is presented in Table 3.4. The minimum distance the part travels along the track
after detection can be used to position the sensor at the correct distance from the air jet for a
particular amplitude setting.
The variability of the stopping distance is expressed in the maximum difference column (the
maximum stopping distance minus the minimum stopping distance). At the maximum
vibration amplitude setting, the difference between the maximum and the minimum stopping
distance was measured to be over 11 mm. Thus, the effect of the stopping distance on the
performance of the air-jet based tools warrants further study.
amplitude setting (1 - 10)
minimum distance (mm)
maximum distance (mm)
maximum difference max - min
(mm)
average (mm)
4 2.38125 3.175 0.79375 2.93688 5.5 3.175 4.7625 1.5875 3.88938 6 3.175 5.55625 2.38125 4.16719 8 5.55625 14.2875 8.73125 10.87438 10 14.2875 25.4 11.1125 18.7325
Table 3.4: Part Stopping Distance Summary as a Function of Amplitude Setting

91
The model described by equations 3-24, 3-25 and 3-26 does not directly account for variability
in the parts stopping distance. In order to investigate the effect the variability in the parts
stopping distance has on the total angle of rotation and the displacement of the center of
gravity in the direction normal to the bowl wall, the model is changed. The constant l1 in the
model, representing the normal distance between the center of gravity and the air-jet line of
force, is replaced by the term l1 (xmin+∆x), where xmin+∆x represents the stopping distance,
xmin represents the minimum stopping distance for the given VBF amplitude setting, and ∆x
represents the random change in stopping distance. The minimum stopping distance for a
part xmin, can be neglected in the model since it can be compensated in hardware by adjusting
the sensor(s) prior to operating the feeder, or in software by including it in the VBF control
program.
For the wooden rectangular prism of Table 3.3, and neglecting xmin, the constant l1 becomes
xll ∆−= 21 . 3-29
The results of simulations for the prism based on the above model (for 0<∆x<12 mm in
increments of 0.1 mm) are shown in Figure 3.15, and Figure 3.16.

92
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
stopping distance (m)
displacement (m)
180 ms 170 ms
160 ms
150 ms
140 ms
130 ms
120 ms
190 ms
200 ms
Figure 3.15: Displacement of Parts c.g. as a Function of its Stopping Distance
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
stopping distance (m)
total angle of rotation (rad)
180 ms 170 ms
160 ms
150 ms
140 ms
130 ms
120 ms
190 ms 200 ms
Figure 3.16: Total Angle of Rotation as a Function of the Stopping Distance

93
In all the simulations, the assumed track coefficient of friction was 0.29, and the force of the
air jet equivalent to 2.3 grams. The above graphs show nine simulation sets with 100
simulations per set. The duration of the air-jet pulse was varied from set to set (120 ms to 200
ms in 10 ms increments).
When the duration of the air jet pulse is adjusted to its higher operating range (190ms to 200
ms) the air jet is capable of successfully reorienting the part in the presence of stopping
distance variations of over 4 mm. For the parts stopping distance of 11 mm the torque due to
the friction is larger than the torque developed by the air jet and the part would not rotate. For
the highest VBF amplitude setting, the force of the air jet as well as the air pulse duration need
to be increased.
When the stopping distance is too large (e.g. the parts center of gravity is at or near the air jet)
the reorientation may not be feasible. When the parts center of gravity passes the air jet, it is
possible to reorient the part into an incorrect orientation. This presents a limitation of which
the practitioners must be aware. The easiest solution would be to operate the VBF within the
tool limitations. Another solution could be based on the sensory feedback informing the
computer about a successful (or unsuccessful) reorientation. Then, the part not reoriented
correctly would be returned to the bowl by a more powerful air jet. Some more sophisticated
solutions could involve a controlled part deceleration to eliminate the variable stopping
distance problem, while others could use multiple air-jet sensor pairs. The investigation of
the random variable ∆x could lead to a more elegant solution.

94
3.3 Model for Part Reorientation in the Bowl Wall Plane
The development of this model will follow a procedure similar to the one utilized in Section
3.1, although it will use as a starting point the results of the analysis performed in Section 2.8.
The model is divided into two major sections: one describing the part motion while the part is
in contact with the track, and the other describing the part motion while the part is in the air.
While the part is in the contact with the track, the model is partitioned in a number of
subsections depending on the value of the rotation angle. The angle θ will be varied from 0 to
2π. For all the model subsections, the force equation 2-20 does not change.
When the rotation angle θ is 0 ≤ θ ≤ π/2 - α, from equations 2-20, 2-21 and 2-22 follows:
)()(
343
13
llmlIFlmlFmgI
F aat ++
+−=
µ 3-30
IlFlFlF tta 431 µθ −−
= 3-31
3ls θ = . 3-32
Starting with the initial conditions presented in Table 3.1, for each iteration step, equations 3-
30 through 3-32 and 3-9 through 3-12 are applied to obtain the angle of rotation, angular
velocity, angular acceleration, linear displacement, linear velocity, and linear acceleration of the
part.

95
The above model subsection is subject to a number of conditions. Initially, to ensure the
rotation, the force of air Fa must satisfy conditions:
1
43
lll
FF taµ+
> 3-33
and
ta FmgF −> 3-34
which for the sample part in Figure 2.29 simplifies to
)1(lhFF ta µ+> 3-35
and
2mgFa > . 3-36
Further, the force Fa becomes zero when the time from the beginning of the part motion
exceeds the air-jet pulse time. In addition, Fa equals zero when the part rotates out of the
reach of the air jet, i.e. when
13)cos( lll <−θ . 3-37

96
For the rotation angle θ such that π/2 - α < θ ≤ π/2, the force equation 2-20 holds. The
torque equation 2-21, and equation 2-22 are modified to
θµ IlFlFlFT ttacg =−+= 431. 3-38
3ls θ = , 3-39
yielding to
)()(
343
13
llmlIFlmlFmgI
F aat −+
+−=
µ 3-40
IlFlFlF tta 431 µθ −+
= . 3-41
At θ = π/2, another surface of the part is in contact with the track, and as the rotation angle
increases another edge engages the track.
For π/2 < θ ≤ π/2 +α, and
)cos(2
25 αθ −=
dl 3-42
)sin(2
26 αθ −=
dl , 3-43
the summation of torques about the center of gravity produces

97
θµ IlFlFlFT ttacg =−−= 651. . 3-44
The relation between the accelerations becomes
5ls θ = . 3-45
From 2-20, 3-42 and 3-43 follows:
)()(
565
15
llmlIFlmlFmgI
F aat ++
+−=
µ 3-46
IlFlFlF tta 651 µθ −−
= . 3-47
For the range of θ, π/2 + α < θ ≤ π the following holds
θµ IlFlFlFT ttacg =−+= 651. 3-48
5ls θ = , 3-49
resulting in
)()(
565
15
llmlIFlmlFmgI
F aat −+
+−=
µ 3-50
IlFlFlF tta 651 µθ −+
= . 3-51

98
Due to the part symmetry, the kinetic equations for π < θ ≤ 3π/2 -α, 3π/2 -α < θ ≤ 3π/2,
3π/2 < θ ≤ 3π/2 +α, and 3π/2 + α < θ ≤ 2π are identical to the equations already derived for
0 ≤ θ ≤ π/2 - α, π/2 - α < θ ≤ π/2, π/2 < θ ≤ π/2 +α, π/2 + α < θ ≤ π, respectively.
The second section of the model describes the part motion while the part is in the air. For θ
<π/2 - α, the part is in contact with the track. At θ =π/2 - α, the part leaves the track if the
upward velocity of the part is greater than zero. In that case, the reaction force of the bowl
track acting on the part is equal to zero, the linear and the angular accelerations are
independent, and the part motion is governed by equations 2-29 and 2-30.
The part stays in the air until one of the edges, or the whole surface, makes contact with the
track. Which edge will hit the track depends on the part orientation at that time, therefore
depends on the rotation angle.
For θ such that π/2 - α < θ ≤ π/2, the closest edge to the track is the edge that was in contact
before the part left the track. The z coordinate of that edge is s-l4, assuming a coordinate
system with the origin placed at the parts center of gravity at t = 0. In the same coordinate
system, the z coordinate of the track is h/2. Therefore, the condition for the part to be in the
air is
24hls −>− . 3-52

99
For θ = π/2, a whole surface may contact the track leading to the minimum linear
displacement of (l-h)/2. For π/2 < θ ≤ π, the condition for the part to be in the air is
26hls −>− . 3-53
At θ = π, a whole surface could make contact with the track resulting in the linear
displacement of zero. Due to the part symmetry, conditions for the part in the air for π < θ ≤
3π/2, and 3π/2 < θ ≤ 2π are inequalities 3-52 and 3-53, respectively.
3.3.1 Simulation Example using MATLAB
Based on the model equations in the previous subsection, a simulation program is written as a
MATLAB script M-file. The part and the process characteristics used in the simulation
presented here are obtained from the physical measurements described in Table 3.3. Figure
3.17 describing the part motion is the results of the simulation for the force of the air jet equal
0.0392 N (equivalent to 4 grams), the coefficient of friction µ=0.29, and the air jet duration
time ∆t=100 ms.
The graphs in Figure 3.17 represent kinematics and dynamics variables of interest for the
analysis of the part motion during the observation period. In this example, the air jet stopped
acting on the part (100 ms) while the part was still in contact with the bowl track. The part-
track separation occurred at about 105 ms from the beginning of the motion. The part was in
the air from 105 ms to 143 ms.

100
0 0.1 0.2 0.3 0.40
0.005
0.01
0.015
S (m)
0 0.1 0.2 0.3 0.40
0.5
1
1.5
theta (rad)
0 0.1 0.2 0.3 0.40
0.02
0.04
0.06
Time in seconds
Ft (
N)
0 0.1 0.2 0.3 0.40
0.02
0.04
Time in seconds
Fa (
N)
0 0.1 0.2 0.3 0.40
10
20
omega (rad/s)
0 0.1 0.2 0.3 0.4-1000
-500
0
500
omega dot (rad/s*s)
0 0.1 0.2 0.3 0.4-0.5
0
0.5
Vel (m/s)
0 0.1 0.2 0.3 0.4-10
-5
0
5
accel (m/s*s)
Figure 3.17: Variables Describing the Part Motion in the Bowl Wall Plane

101
3.4 Model for Part Reorientation in the Plane Orthogonal to the Track and the Wall Plane
While the part is in contact with the track and the bowl wall, equations 2-31, 2-32 and 2-33
apply. To obtain the position, velocity, and acceleration information at each iteration step
these equations will be solved for forces Ft, and Fw together with the angular acceleration θ .
This can be accomplished by substituting terms for x and z from equations 2-42 and 2-43
into Equations 2-31 and 2-32. Then, after rearranging and expressing equations 2-31 through
2-33 in matrix form yields
BXA =⋅ 3-54
corresponding to
−=
⋅
++−−−
12543
3
4 01
1
lFmgFF
F
Illllmlml
a
aw
t
wt
w
t
θµµµ
µ
. 3-55
Equation 3-54 can be solved for X leading to
BAX ⋅= −1 3-56
With forces and angular acceleration known, by substituting back into 2-42 and 2-43 the linear
accelerations are obtained for each time increment. The velocity and position data are
calculated at each iteration step i by applying the following formulas
tiii ∆+= − θθθ 1 3-57

102
2
2
1
tt iiii
∆+∆+= −
θθθθ
3-58
txxx iii ∆+= − 1 3-59
2
2
1txtxxx i
iii∆
+∆+= −
3-60
tzzz iii ∆+= − 1 3-61
2
2
1tztzzz i
iii∆
+∆+= −
3-62
where ∆t is the time duration of each iteration step.
The above model is subject to a number of conditions. Initially, to ensure the rotation, a
number of conditions must be satisfied. For motion to occur in the x direction
wtt FF <µ . 3-63
For motion to occur in the z direction
twwa FFmgF −−> µ , 3-64
and for rotation about the center of gravity
)()( 43251 llFllFlF ttwwa µµ +++> . 3-65
Furthermore, the force the bowl wall exerts on the part, Fw, will stop acting when either
23 wdx −
≥ 3-66
or
αθ ≥ 3-67

103
causing the acceleration in the x direction to become
mFa tt
xµ
−= 3-68
until the motion in the x direction ends, or the part leaves the bowl track. While the part is in
contact with the track and away from the bowl wall, i.e. α < θ ≤ π/2-α, Ft, θ , and z can be
expressed by equations of the same form as equations 3-30, 3-31 and 3-32, respectively. Thus,
)()(
343
13
llmlIFlmlFmgI
Ft
aat ++
+−=
µ 3-69
IlFlFlF ttta 431 µθ −−
= 3-70
3lz θ = . 3-71
When the part reaches the angle of rotation θ = π/2-α it may leave the track. If the value of
the parts velocity in the z direction is zero at this instance the part will stay in contact with the
track. Then, for θ > π/2-α, expressions for z , Ft, and θ assume the same form as equations
3-39 through 3-41, respectively. Therefore,
)()(
343
13
llmlIFlmlFmgI
Ft
aat −+
+−=
µ 3-72
IlFlFlF ttta 431 µθ −+
= 3-73
3lz θ = . 3-74

104
However, once the part is in the air, the equations for the parts motion lead to
gz −= 3-75
and
IlFa 1=θ . 3-76
3.4.1 Simulation Example using MATLAB
Based on the model equations in the previous subsection, a simulation program is written as a
MATLAB script M-file. The part and the process characteristics used in the simulation
presented here are obtained from the physical measurements, described in Table 3.3. Figure
3.18 describing the part motion contains the results of the simulation for the force of the air jet
equal 0.0392 N (equivalent to 4 grams), the track coefficient of friction µt=0.29, the bowl wall
coefficient of friction µw=0.25, and the air jet duration time ∆t=130 ms.
The graphs in Figure 3.18 represent kinematics and dynamics variables of interest for the
analysis of the part motion during the observation period. In this example, the air jet stopped
acting on the part (126 ms) while the part was in the air. The part left the bowl wall at about
65 ms when Fw became zero. The part-track separation occurred at about 100 ms from the
beginning of the motion (Ft=0). The part was in the air from 100 ms to 130 ms.

105
0 0.1 0.2 0.3 0.40
1
2
theta (rad)
0 0.1 0.2 0.3 0.40
1
2
3x 10
-3
x (m)
0 0.1 0.2 0.3 0.40
0.005
0.01
z (m)
0 0.1 0.2 0.3 0.40
20
40
60
omega (rad/s)
0 0.1 0.2 0.3 0.40
0.02
0.04
0.06
v x (m/s)
0 0.1 0.2 0.3 0.4-0.2
0
0.2
v z (m/s)
0 0.1 0.2 0.3 0.40
500
1000
1500
omega dot (rad/s*s)
0 0.1 0.2 0.3 0.4-2
0
2
ax (
m/s*s)
0 0.1 0.2 0.3 0.4-10
-5
0
5
az (
N)
0 0.1 0.2 0.3 0.40
0.02
0.04
Time in seconds
Fa (
N)
0 0.1 0.2 0.3 0.40
0.02
0.04
0.06
Time in seconds
Ft (
N)
0 0.1 0.2 0.3 0.40
0.005
0.01
0.015
Time in seconds
Fw
(N)
Figure 3.18: Variables Describing the Part Motion in the Plane Normal to the Track and the Wall Plane

106
3.5 Simulation Results
The development of the model for the air-jet based part reorientation in three different planes
was based on a simple wooden rectangular prism. In order to expand the validity and
usefulness of the model, another four parts were added. The characteristics of each part are
presented in Table 3.5. The simulation results yielding the necessary pressure and pulse
duration for reorienting each part into a desired position/orientation are obtained and
presented in this section. Then, a summary of the results is given for each air-jet based tool.
The comparison of the simulation and the test results is presented in Section 4.5.
part connector housing PB
switchSSR wood
prism aluminum
prism
Length (cm) 2.2 3.5 2.0 3.4 2.5 Width (cm) 1.6 1.3 1.2 2.1 2.1 Height (cm) 1.2 1.0 0.9 1.2 1.3
Mass (g) 1.91/4.91/7.65 3.14 4.52 5.91 18.23 µ 0.35 0.32 0.28/0.36 0.29/0.31 0.3
Table 3.5: Part Characteristics
The first set of results is obtained by reorienting the parts in the bowl track plane. In Table 3.6
are represented results obtained using the connector housing with a mass of 1.91 grams. In

107
Table 3.7 simulation results are provided when the mass of the housing is changed to 4.91
grams and in Table 3.8 when the mass is changed to 7.65 grams.
part rotation pressure time range degrees (bar) (ms) 1.6 115~195 1.7 95~125 90 1.8 60~80 1.9 60
connector 1.7 130~195 housing 1.8 85~110 1.91 g 180 1.9 65~80
2 60 1.8 115~150 270 1.9 85~90 2 65~70
Table 3.6: Connector Housing, m=1.91 g, Reorientation in the Track Plane, Simulations

108
part rotation pressure time range degrees (bar) (ms) 2.2 115~155 2.3 90~115 2.4 70~90 90 2.5 60~75
2.6 60~65 2.7 60 2.2 160~195
2.3 125~195 2.4 95`135
2.5 80~105 connector 180 2.6 70~90 housing 2.7 65~80 4.91 g 2.8 60~70
2.9 60 2.4 140~195 2.5 110~140 2.6 95~105 2.7 85~90 270 2.8 75~80 2.9 65~70 3 60~65 3.1 60
Table 3.7: Connector Housing, m=4.91 g, Reorientation in the Track Plane, Simulations

109
part rotation pressure time range degrees (bar) (ms) 2.5 185~195 2.6 125~170 2.7 100~130 2.8 85~110 90 2.9 70~95 3 65~80 3.1 60~75 3.2 60~65 3.3 60 2.6 175~195 2.7 135~195 2.8 115~195 2.9 100~140 3 85~115
connector 3.1 80~100 housing 180 3.2 70~90 7.65 g 3.3 65~80
3.4 60~75 3.5 60~65 3.6 60 3.7 60 2.9 145~195 3 120~160 3.1 105~125 3.2 95~105 3.3 85~95 270 3.4 80~85 3.5 70~75 3.6 65~70 3.7 65 3.8 60
Table 3.8: Connector Housing, m=7.65 g, Reorientation in the Track Plane, Simulations

110
The push-button switch is a complicated part, thus its characteristics required in the simulation
program were obtained by using general principles. The only rotation angle of interest for the
switch is 180°. The simulation results are tabulated in Table 3.9. In the first case, the air was
acting on the lever arm, and in the second, on the base of the switch. As expected, the switch
was easier to reorient with air-jet forces acting near the end of the push-button.
part rotation pressure time range degrees (bar) (ms)
PB switch 1.9 75~195 case #1 180 2 60~195
2.5 60~195 PB switch 2 85~195 case #2 180 2.5 60~195
Table 3.9: Push-button Switch, Reorientation in the Track Plane, Simulations
The solid-state relay reorientation in the track plane was simulated with pins up. The results
are described in Table 3.10.

111
part rotation pressure time range degrees (bar) (ms) 2.1 140~175 90 2.2 95~115 2.3 85~90 2.4 60~75 2.5 60~65
2.1 180~195 2.2 120~195 2.3 95~140 2.4 80~105
SSR 180 2.5 70~85 2.6 60~75 2.7 60~65 2.8 60 2.3 145~195 2.4 110~125 2.5 90~100 270 2.6 80~85 2.7 70~75 2.8 65 2.9 60
Table 3.10: Solid-state Relay, Reorientation in the Track Plane, Simulations
The rectangular wooden prism was simulated with the wood surface against the track.
Simulation results for this part are tabulated in Table 3.11.

112
part rotation pressure time range degrees (bar) (ms) 2.2 170~195 2.3 125~155 2.4 100~125 90 2.5 85~105 2.6 75~90 2.7 65~80 2.8 60~70 2.9 60~65
3 60 2.3 160~195
2.4 130~195 2.5 110~150 2.6 95~120
wooden 2.7 85~105 prism 180 2.8 75~90
2.9 70~85 3 65~75 3.1 60~70 3.2 60~65 3.3 60 2.5 155~195 2.6 125~155 2.7 110~120 2.8 95~105 2.9 90~95 270 3 80~85 3.1 75 3.2 70 3.3 65 3.4 60
Table 3.11: Rectangular Wooden Prism, Reorientation in the Track Plane, Simulations

113
The results obtained by simulating the reorientation of the rectangular aluminum prism in the
track plane are presented in Table 3.12.
part rotation pressure time range degrees (bar) (ms) 3.5 175~195 4 95~135 90 4.5 65~90 5 60~65
aluminum 4 140~195 prism 4.5 95~120
180 5 75~85 5.5 60~70 4.5 125~190 270 5 90~105 5.5 75~80
Table 3.12: Rectangular Aluminum Prism, Reorientation in the Track Plane, Simulations
Reorientation in the bowl wall plane was simulated with the five test parts as well. The results
are tabulated in Table 3.13.
The results of simulations reorienting the parts in the plane normal to the track and to the
bowl wall plane are presented in Table 3.14. The model conditions were set so that every
rotation of more than 90° results in a successful reorientation simulating part contact with
the bowl wall.

114
part rotation pressuretime
range degrees (bar) (ms)
connector 90 1 80~90 housing 1 100~1251.91 g 180 1.1 60~75
connector 90 1.5 140~195housing 1.6 115~1354.91 g 180 2 60~65
2 145~195connector 90 2.5 60~65 housing 2.2 105~1307.65 g 180 2.5 75~85
2.9 60 push-button 1.5 60~195
switch 180 2 65~105 1.4 170~185 90 1.5 95~110 1.7 60
SSR 1.5 130~140 180 2 60~65 2.1 60 1.7 135~160
90 2 75~80 wooden 2.2 60 prism 1.7 170~190
180 2 90~100 2.5 60
3.8 190~195 4 130~195 90 4.5 85~95 5 65
aluminum 5.3 60 prism 4.2 140~150
4.5 100~135 180 5 85~95 5.5 60~75
Table 3.13: Reorientation in the Wall Plane, Simulations

115
part rotation pressuretime
range degrees (bar) (ms)
connector 1 70~195 housing 90 1.5 60~195 1.91 g 1.7 60~195
1.5 170~195connector 2 60~195 housing 90 2.5 60~195 4.91 g 3 60~195
3.5 60~195 2 180~195 2.5 60~195
connector 3 60~195 housing 3.5 60~195 7.65 g 90 4 60~195
4.5 60~195 5 60~195 5.3 60~195
1.2 105~195push-button 1.5 60~195
switch 90 2 60~195 2.5 60~195 1.5 90~195
SSR 90 2 60~195 2.5 60~195 3 60~195 2 65~195
2.5 60~195 3 60~195
wooden 3.5 60~195 prism 90 4 60~195
4.5 60~195 5 60~195 5.5 60~195
aluminum 4.5 85~195 prism 90 5 65~195
5.5 60~195
Table 3.14: Reorientation in the Plane Normal to the Track and the Bowl Wall Plane, Simulations

116
Chapter 4
IMPLEMENTATION AND EXPERIMENTAL RESULTS
In this chapter, a number of tests will be performed with different parts, materials, air-jet tools,
and durations of the air-jet forces. For a particular part, the results will show the path of the
center of gravity and the angle by which the part rotated. These will be compared to the
simulations to verify the models.
Parts travel along the track of a VBF by sliding or hopping. Comparing experimentally the
two modes of part motion, it is confirmed that by hopping parts can move 2 to 3 times faster
than in the sliding mode. Modeling the part motion in the hopping mode is difficult due to
the erratic part behavior caused by elastic forces acting between the part and the bowl. To
solve this difficulty, the VBF is operated at high speed until the part reaches a sensor. Then
the VBF is turned off for a moment, the part is reoriented, and the VBF turned back on.
4.1 Experimental VBF System
In the early stages of this research, a sensor-based VBF is equipped with an air jet to obtain an
empirical proof of the feasibility for application of an active air-jet based tool. After that, the
reliability of a tool that could reorient a part in the plane of the bowl track was increased. To
complete the active air-jet based tooling, an active tool capable of flipping a part is introduced.
In order to study the behavior of different parts as a function of air pressure and the length of

117
the air-pulse(s), a program is developed to provide precise control for timing and the duration
of the air jet(s).
4.1.1 Hardware Considerations and Implementation
An air-jet based VBF system serving as a test bed in this study is comprised of an Automation
Devices, Inc. VBF equipped with an amplitude controller, an air-jet based set of in-bowl tools,
a pressure measurement/adjustment subsystem, and a computer-controlled sensor/actuator
subsystem. The experimental VBF system hardware is depicted in Figure 4.1. A picture of the
air-jet based tools is presented in Figure 4.2. A LabVIEW wiring diagram used for pressure
measurements is displayed in Figure 4.5. The electrical schematic of the VBF system is
illustrated in Figure 4.6 on page 128.
A photograph of the experimental VBF system used in this study is shown in Figure 4.1. The
oscillations of the VBF are controlled via an SCR based amplitude controller with a manual
ON/OFF switch and a rotational single-turn potentiometer. A control computer via interface
electronics and a solid-state relay (SSR) exerts additional control over the VBF.
A high intensity light bulb with a parabolic reflector is used as a light source, and is placed
above the VBF track, near the outlet opposite the fiber-optic cable. The position of the light
source may be adjusted before the experimental runs, as a part of the calibration process. The
fiber-optic cable conveys the part presence information to the control computer via the
interface electronics.

118
Figure 4.1: Experimental VBF System
Figure 4.2 is a photograph of the VBF bowl with modifications implemented for testing of
various air-jet based tools. The modifications include a track assembly for mounting in-track
air-jets and fiber-optic sensors and a wall assembly for mounting in-wall air-jets and sensors.
For the track assembly, a part of the track near the bowl outlet was removed and replaced with
a transparent piece of Plexiglas. Under the Plexiglas, another piece of opaque plastic was
mounted. This piece contains a number of vertical holes (spaced in honeycomb fashion for
maximum hole density) sized to accommodate fiber-optic cables. Some of the holes were
adapted to accept 1/8-inch (3.175 mm) diameter plastic tubes carrying air. A paper with 0.1-

119
inch (2.54 mm) squares is inserted just below the transparent portion of the track for the ease
of quantification of the part position/orientation data when observed with a high-speed
camera. This assembly allows rapid deployment of multiple sensors and/or air jets in the bowl
track. In Figure 4.2, one air jet and one fiber-optic sensor are mounted.
Figure 4.2: Experimental Setup of Air-jet Based Tools

120
The sidewall assembly consists of an aluminum plate with two adjustable mounting holes and
four threaded holes placed horizontally. The mounting holes allow for about ¾-inch (19 mm)
variation in vertical direction. The threaded holes can accept bulkhead unions for ¼-inch
(6.35 mm) air-tubes. In Figure 4.2 only one union is fastened to the aluminum plate, and
through a hole in the bowl wall it applies air to the part when the sidewall air-valve is opened.
Since the solenoid-actuated air-valve used in this study has only 1/8-inch (3.175 mm) delivery
ports, a custom made coupler with a 1/8-inch (3.175 mm) fitting connects the air-tube from
the air-valve to the bulkhead union. This assembly is capable of providing up to four air jets to
the bowl wall at variable heights with respect to the track.
4.1.1.1 AIR BARRIERS AND THE PNEUMATIC CIRCUIT
At the proof-of-concept stage of this study, a VBF equipped with a sidewall air jet and an in-
track sensor was used to reorient a part. A large number of trials were unsuccessful. Often,
the part would move pass the air jet as if the air was not applied. An increase in the line
pressure didnt solve the problem. After many careful observations, a peculiar phenomenon
was discovered; the part does not change its orientation if it happens to be in close proximity
of the air jet when the air-valve opens. At this time, the air jet was placed flush with the inner
wall of the bowl. Moving the air jet further inside the wall had no effect, but moving the part
away from the bowl wall did. Thus, an air barrier, a guide distancing the part from the wall
at the air jet position was created and successfully implemented. When the track of the bowl
was equipped with air jets, an air barrier was added with the same purpose in mind.

121
An inquiry leading to the quantification of the air-jet pulling force and the appropriate sizing
of the air barriers was based on the airfoil effect governed by the Bernoulli principle, some
practical aspects of fluid dynamics [53, 54], and experimentation. Figure 4.3 depicts a part
laying on the track and being pushed by the air jet. The pressure P2 is the atmospheric
pressure. The velocity v2 of the air passing by the part on the side opposite the bowl wall is
assumed zero. In order to calculate the force F the air jet is exerting on the part, the average
velocity v1 of the air passing by the part is required.
part
bow
l wall
air jetv0 P0
v1
P2
v2
F
δ
bowl trackP1
ρ0
ρ1
ρ2
Figure 4.3: Top View of Air Jet Forces Pulling a Part

122
Figure 4.4 represents the pneumatic circuit utilized for pressure measurements. The same
pneumatic circuit is used as the air-jet tool for part reorientation in the track plane. For the
other two tools, the mounting holes in the bowl track are made so that the tube from the air-
valve could friction fit. The shop air is supplied via a filter-regulator-lubricator (FRL) unit, the
quick coupler with a matching nibble QC, and the tee T1. Pressure is measured with a pressure
transducer connected to the pneumatics circuit via the tee T2. The remainder of the circuit
consists of two bulkhead unions U1 and U2, two custom-made couplers C1 and C2, a solenoid-
actuated air-valve, and 1/8-inch (3.175 mm) tubing with corresponding fittings.
airsource
T1 T2air-
valvedeadend
1/4 1/8
pressuresensor
P
C1 C2
QC
FM2
Figure 4.4: Complete Pneumatic Circuit of an Air-jet Tool

123
The air supplys FRL is equipped with a mechanical dial pressure gage that was used for crude
adjustments of the isentropic stagnation pressure. The fine adjustments of the pressure were
facilitated by the use of an Omegadynes pressure transducer PX35D0-100GV [55] connected
to a PC via an Analog Devices signal conditioner 5B31-01, and a National Instruments
analog/digital I/O board AT-MIO-16X [56]. A data acquisition program displaying and
logging the pressure data was written in LabVIEW [57, 58, 59, 60]. The block diagram of the
program is depicted in Figure 4.5.

124
Figure 4.5: LabVIEW Block Diagram Used with Pressure Sensor
In the first approximation, according to Figure 4.3 and assuming the inviscid airflow, Bernoulli
principle yields
21
21
2221 222
vvvPPP avgavg ρρρ −=−=−=∆ . 4-1
The pressure difference ∆P results in a force Fpull acting on the part. For the length of the part
l, and the height of the part h, this force is equal to

125
212
vlhPlhPAF avgpull
ρ−=∆=∆= . 4-2
In addition, the air leaving the tube pushes the part with a force Fpush such that
)(4
)()( 20
2
20 PPIDPPAF tubepush −=−= π 4-3
where ID represents the inner diameter of the tube. Finally, knowing the parts mass m, its
coefficient of friction with respect to the bowl track µ, the pressures and the in-tube air
velocity, the force equation for the part just before it starts moving
+== mgFFF pushpully µ;0 4-4
with substitutions for the forces from 4-2 and 4-3, the velocity v1 can be obtained. Using the
conservation of mass principle applied to a control volume bounded by a control surface
placed between the air jet and the part the distance between the bowl wall and the part can be
derived. Since the air velocity was measured to be above 0.3M for a considerable portion of
the air jet operating range, the air should be treated as a compressible fluid in the calculations.
The above method required measuring of pressure in the space between the bowl wall and the
part. Since this was not feasible with the instruments available, a more direct approach was
selected. The air gap and therefore the thickness of the air barrier, as well as the maximum
pulling force of the air jet were measured directly.
An iron plate (140mm x 12mm x 3mm) was affixed by one end to a sturdy base. Close to the
free end of the plate (10 mm from the end), a 1/8-inch (3.175 mm) hole was drilled. From the

126
top, a matching size tube was inserted into the hole. The tube was placed flush with the
bottom of the plate. The air was applied through a pneumatic circuit from the place where the
arrow from 1/8 points in Figure 4.4. Then, by adjusting the air supply pressure a minimum
force capable of levitating various parts just below the lower surface of the plate was
generated.
In one of the experiments, at the pressure of 2.8 bars, a 92-gram solderless electronic
breadboard was attached to the plate. The effective area A of the plate in contact with the
breadboard was 26mm x 12 mm. For the same pressure, the measured air jet pushing force
was only 0.35 N (equivalent to 35.68 grams).
For the 1/8-inch (3.175 mm) air-jet tube used in the experiments, the inner diameter is equal
to 2.1 mm, and the air gap measured was 2.5 mm. For the ¼-inch (6.35 mm) tube, the inner
diameter is equal to 4.5 mm, and the air gap measured was 5.5 mm. The above values were
unaffected by varying pressure. Thus, for 3.175 mm tube, it is recommended to use an air
barrier to create at least a 3 mm gap between the part and the air jet. For the 6.35 mm tube,
the gap should be at least 6 mm wide.
4.1.1.2 ELECTRICAL SUBSYSTEM
The electrical subsystem of the air-jet based VBF system consists of the computer parallel
port, the interface electronics, sensor(s), actuators, and the electro-magnet of the VBF. The
parallel port pins 2 and 3 are used as outputs and pin 13 as an input [61].

127
The output from the parallel port pin 2 is sent through two 74LS14 inverters connected in
series to the base of an MPSA13 (NPN transistor), powering the 5V solenoid. The two 74ls14
Schmidt trigger inverters provide sufficient current to the base of the transistor. In addition,
they act as a buffer protecting the parallel port from unwanted transient voltages. An external
reverse-biased diode (1N4001) protects the transistor. The solenoid coil is protected by an
internal reverse-biased freewheeling diode connected in parallel with it. An internal diode
connected in series with the solenoid coil insures only one correct way of connecting the
power. The two diodes form a surge suppression circuit. The solenoid is part of a Hymphreys
401 micro solenoid air valve [44]. It was chosen for its low power consumption, and the low
operating DC voltage enabling the use of a single 5V power supply.
The output from pin 3 of the parallel port is sent through a 74LS14 inverter to the input of a
solid-state relay (SSR), Crydom D1202 [62]. When energized, the SSR switches off the power
to the electromagnet thus stopping the VBF. The D1202 SSR has a low operating input DC
voltage (ON: 3 to 32 V and OFF: 1 V) making it TTL compatible when operated at 5 V. A
silicon controlled relay (SCR) AC switch rated at 2.5 A is used as the output. The zero-
crossing switch-off characteristic of SCRs may cause up to 8.3 ms delay (1/2 cycle) from the
time the command to switch off the power enters the SSR until the time the electromagnet is
actually turned off.

128
3
MPSA13
+ 5 V
1N40012
13
25
+ 5 V
QT L1462Photo Darlington
input from fiber-optic cable470 Ω
470 Ω
100 KΩ
1 KΩ
solenoid of air-valve
110 V60 Hz
parallelport
74LS14 74LS14
74LS14
74LS14
vibratorybowl
feeder
solid state relay
Figure 4.6: Electrical Schematic of Control Hardware for Experimental VBF System

129
The sensory input to the parallel port is obtained from a light source generating a light beam, a
part acting as a switch, and an NPN photo-Darlington (QTL1462) detecting the presence or
absence of light at its base. Due to high electromagnetic fields generated by the VBF
electromagnet, all the electronics is placed away from the feeder. A fiber-optic cable transports
the light from the track to the photo-Darlington pair. The light sensitivity is adjusted via a
100K potentiometer in series with a 470 Ω resistor on the collector (power) side of QTL1462.
The output from the collector is connected to the Schmidt trigger inverter 74LS14 via a
current limiting resistor of 470 Ω. The output of the 74LS14 supplies a clear TTL signal to the
parallel port input pin 13. Pin 25 is used as the signal ground.
4.1.2 Description of the VBF System Control Algorithm
The complete control program written in C is found in APPENDIX A. Here, only the
algorithm and some more interesting details will be explained.
The VBF control program has one sensory input and two outputs: one controlling the air-
valve and the other controlling the power to the VBF. A timer is used to control a solenoid-
actuated air-valve in a vibratory bowl feeder for part reorientation. The airflow through the
valve is not controlled, only the duration of the air jet. The variable time can be adjusted in
tenths of a millisecond. A flow chart of the test control program is presented in Figure 4.7.
In order to control the length of an air jet pulse using different computers running at different
speeds, a clock is needed that is independent of the processor speed. One of the system timers
is suitable for this purpose. Usually, there are three timers available to the programmer,

130
identified as timers 1, 2, and 3. Generally, timers 1 and 3 are already in use by the computer
system. Timer 2 is a general-purpose timer that is used to drive the speaker. The speaker is
not used in this program, so timer 2 is the best choice. The timer is programmed by doing
three writes to I/O. The first write is a control word written to 0x43. This first byte sets the
"Mode" of the timer. The next two writes are to address 0x42. The low byte followed by the
high byte of a 16-bit word becomes the "count" of the timer. The timer decrements this word
as directed by the mode. Time is up when count reaches zero. The output bit of the timer can
vary from system to system; therefore, it has to be located before it can be used. This search is
executed by the FindSystemTimer() function.

131
START
find system timer
initialize air-pulse timer to 100 ms
wait for a key pressed
key = +
key = =
key = -
key = space bar
key = q
END
decrease air-pulsetime by 1 ms
increase air-pulsetime by 1 ms
wait for part
part in correctorientation
stop VBF
delay
activate air jet
air-pulse time delay
deactivate air jet
delay
restart VBF
yes
noyes
yes
no
no
yes
no
yesno
yes
no
Figure 4.7: Flow Chart of the Test Control Program

132
4.2 Part Reorientation in the Track Plane an Alternative View
During the reorientation process, an air jet exerts a constant force on a part. The kinetic
energy developed by the air jet is dissipated by friction as the part rotates and translates.
frictionrotationfrictionntranslatiorotationntranslatiojetair WWKEKEKE ___ +=+= 4-5
where:
2_a
aajetairvvmKE = 4-6
ma is the mass of the air hitting the part and va is the air velocity. The conservation of
momentum can be expressed as
aa
t
a vmdtF =∆
0
4-7
The forces at various distances from the jet were experimentally measured earlier and found to
remain constant in the range of 0.2 to 5 cm. Thus
aaa
t
a vmtFdtF =∆=∆
0
4-8
Work done against the friction due to the parts translation is
mgsNsW frictionntranslatio µµ ==_ 4-9

133
where µ is the dynamic coefficient of friction between the part and the bowl track, N the
normal force, m the mass of the part and s the linear part displacement. The work against the
friction due to the rotation about the center of gravity of the part is
dAyxPTWA
frictionrotation +==0
22_ θµθ 4-10
where θ is the angle of rotation about the center of gravity, T is the frictional torque, P is the
pressure on the area of the part exerted by the parts weight.
For a rectangular prism, Equation 4-10 becomes
2
2
2
2
2
22_ mgldxdyyx
lwmgW
l
l
w
wfrictionrotation θµθµ =+=
− −
4-11
For 2/πθ = , equations 4-8, 4-9, and 4-11 can be substituted into equation 4-6 and solved for
∆t
)2
(22ls
vFmgt
aa
πµ +=∆ 4-12
For the known velocity of the air, the force of the air jet, the part geometry, and the desired
angle of rotation the pulse duration can be calculated using the above equation.

134
4.3 Parts Used in Experiments
The model was verified experimentally using the parts pictured in Figure 4.8. They include
(from left to right): a plastic connector housing used in automotive industry, a push-button
switch, a solid-state relay, a rectangular wooden prism, and a rectangular aluminum prism.
Each part is chosen to illustrate a different capability of the air-based tool or the algorithm
calculating the force of air or the duration of the pulse. The chosen parts are of different
materials, thus having different coefficients of friction.
The plastic connector housing is hollow and very light. By filling its two symmetrical holes
with solder and lead, the mass of the connector housing is increased from 1.91 grams to 4.91
grams and 7.65 grams, respectively.
The push-button switch has three pins protruding from one end. They practically limit the
number of stable orientations for the switch. In addition, since the push-button and the
switch arm are not in contact with the track, the switch represents a feature rich and
complicated object for reorientation.

135
Figure 4.8: Various Parts Used in Model Verification
The solid-state relay has dimensions (length and width) similar to a typical 16-pin IC, and fits
into a 16-pin IC socket. However, it is a few times heavier than a comparable IC. In addition,
the coefficient of dynamic friction between the track and the SSR resting on the connecting
pins is 0.24. For any other SSR contact surface µ = 0.32.
The rectangular wooden prism represents a relatively large and light part. A piece of light
color paper with dimensions of the top surface was glued to the prism. The papers light
color, grid (2.54 mm squares), drawn diagonals, and the center of gravity were used in
quantifying experimental observations from the high-speed camera. When the prism is resting

136
on the paper surface, its coefficient of friction is 0.29. The track width of the VBF used in the
experiments is just a few millimeters larger than the minimal track width required for the
reorientation of the wooden part.
The rectangular aluminum prism having a mass of 18.23 grams is the heaviest part used in this
study. The length of the prism is close to its width.
4.4 Experimental Results
An example in Figure 4.9 shows a series of photographs obtained by the high-speed camera
[48]. The rectangular wooden prism described in Table 3.3 was reoriented 90º in the track
plane by an air jet developing a force equivalent to 4 grams and having an air pulse duration of
130 ms. The separation of the prism from the bowl wall can be seen in Figure 4.9-c. The
arrow on the prism indicates the direction in which the prism is traveling along the track prior
the action of the air jet.
The results are divided in three sections corresponding to the plane in which the reorientation
is performed. For each part (where applicable), rotation of 90º, 180º and 270º is tested. Since
the information required by the control program is the pressure setting of the pressure source
and the pulse duration, the results are expressed in pressure time space. A summary of the
results for all the test parts is provided.
The test procedure was as follows. For each part, the minimum pressure causing the part to
rotate was established. Then the air-jet pulse duration was varied in 5 ms increments, and the

137
effects on a part recorded. After exhausting the air-jet pulse range, the pressure was increased
by 0.5 bars, and the measurements repeated.

138
a b
c d
e f
Figure 4.9: A Part in Various Stages of Reorientation Obtained by High-speed Camera

139
The full pressure range used in the experiments was between 1 and 5.5 bars. The range of air-
jet pulse durations was between 60 and 195 ms. The above values were chosen for practical
reasons. At pressures below 1 bar, the line losses prohibit any work to be done by the air jet.
About 5.5 bars is the maximum rated pressure for the solenoid-actuated air-valve. When the
pulse duration drops below 60 ms, the performance of the air-valve becomes sporadic since its
dynamic response limit is reached. It was assumed that the pulse duration of 200 ms per part is
too long for a successful operation of a VBF.
4.4.1 Orienting Parts in the Track Plane
Three sets of experiments were performed with the connector housing described in Table 3.5.
The required pressures (bar) with corresponding time ranges (ms) for the connector housing
with (mass 1.91 g) rotations of 90º, 180º and 270º degrees are presented in Table 4.1. After
performing experiments with the increased mass of the connector (4.91 and 7.65 g), the results
are tabulated in Table 4.2 and Table 4.3, respectively.

140
part rotation pressure time range degrees (bar) (ms) 1.5 95~155 90 2 60~90 2.5 60~65
connector 1.5 160~195 housing 180 2 95~120 1.91 g 2.5 70~80
2 125~170 270 2.5 85~90 3 60~65
Table 4.1: Connector Housing, m=1.91 g, Reorientation in the Track Plane
part rotation pressure time range degrees (bar) (ms) 2 195 2.5 130~195 90 3 80~120 3.5 60~95 4 60~70
connector 3 125~195 housing 180 3.5 100~150 4.91 g 4 75~90
4.5 60~70 3.5 155~195 270 4 95~130 4.5 75~80 5 60
Table 4.2: Connector Housing, m=4.91 g, Reorientation in the Track Plane

141
part rotation pressure time range degrees (bar) (ms) 3 115~135 3.5 80~130 90 4 65~105 4.5 60~80 5 60~65
connector 3 140~195 housing 3.5 135~195 7.65 g 180 4 110~195
4.5 85~110 5 70~85 270 4.5 115~185 5 90~105
Table 4.3: Connector Housing, m=7.65 g, Reorientation in the Track Plane
These results indicate that the air jet is capable of discriminating between geometrically
identical parts of different weights. In addition, in some cases it is possible to orient different
parts using the same pressure setting by changing only the air-jet pulse duration.
The push-button switch depicted in Figure 4.8 was an object well suited for reorienting by air-
jet based tooling. Since the push-button and the switch arm are light in comparison with the
base of the switch, the switchs center of gravity (and the center of rotation) is located in the
base. The friction torque depends on the portion of the switch in contact with the track, and
the position of the center of gravity. The base is the only part of the switch in contact with the

142
bowl track. If an air jet acts at the push-button end, (having a long torque arm) it will rotate
the switch much easier than if acting at the base end.
There were two groups of tests performed with the push-button switch. In the first group,
(case #1), the air-jet was acting on the push-button, while in the second group (case #2) the
air-jet was exerting force on the base. Rotations of 180° were observed. The test results for
case #1 are summarized in Table 4.4, and the results for case #2 are in Table 4.5.
A very effective feeding strategy can be developed by comparing the two tables. One may
isolate an appropriate air-jet pressure pulse combination that will reorient the switch if it
encounters the sensor in an incorrect orientation. The same combination can be completely
ineffective in reorienting the switch if it passes by the sensor in a correct orientation (e.g.
pressure of 2 bars and pulse duration of 120 ms). This simplifies the sensor placement since
the sensor only needs to detect the presence of a part, but not its orientation.
part rotation pressure time range degrees (bar) (ms) 1.5 160~195
push button 2 105~155 switch 180 2.5 75~100
case #1 3 60~70
Table 4.4: Push-button Switch, Reorientation in the Track Plane, Case #1

143
part rotation pressure time range degrees (bar) (ms) 2 140~195
push button 2.5 90~135 switch 180 3 70~90
case #2 3.5 60~70
Table 4.5: Push-button Switch, Reorientation in the Track Plane, Case #2
The experiments involving the SSR characterized in Table 3.5, were performed with the SSR
oriented pins-up. Otherwise, the air would pass between the pins without affecting the part.
The test results for rotations of 90º, 180º and 270º degrees are presented in Table 4.6.
The tests performed with the rectangular wooden prism, used as an example part throughout
this work, were divided into two groups, depending on the initial orientation. In the first case,
the prism was initially oriented with the wood surface contacting the track, and in the second,
the paper was in contact with the bowl. The justification for these two tests was to observe
the effect the coefficient of friction has on the reorientation variables.
The test results obtained with the wood contacting the track (case #1) are summarized in
Table 4.7. The results with the paper contacting the track (case #2) are presented in Table 4.8.

144
part rotation pressure time range degrees (bar) (ms) 2 130~170 2.5 85~130 90 3 65~90 3.5 60 2 175~195
SSR 2.5 135~195 180 3 95~130 3.5 65~85 3 135~195 270 3.5 90~95
Table 4.6: Solid-state Relay, Reorientation in the Track Plane
part rotation pressure time range degrees (bar) (ms) 2 190~195 2.5 125~150 3 100~130 90 3.5 80~100 4 65~75 4.5 60~65 5 60
wooden 2.5 155~195 prism 3 135~195
case #1 3.5 105~145 180 4 80~130 4.5 70~95 5 65~85 3.5 150~170 4 135~140 270 4.5 100~105 5 90~100
Table 4.7: Rectangular Wooden Prism, Reorientation in the Track Plane, Case #1

145
part rotation pressure time range degrees (bar) (ms) 2.5 140~165 3 100~125 3.5 80~100 90 4 65~95 4.5 60~75 5 60 2.5 170~195
wooden 3 130~195 prism 3.5 105~155
case #2 180 4 100~135 4.5 80~115 5 65~95 3.5 160~195 4 140~195 270 4.5 120~195 5 100~120
Table 4.8: Rectangular Wooden Prism, Reorientation in the Track Plane, Case #2
The results in Table 4.7 and Table 4.8 are compared. In most cases, it is possible to distinguish
between the two surfaces with different coefficients of friction.
A rectangular aluminum prism characterized in Table 3.5, is used in experiments to illustrate
how even a heavier object can be reoriented by an air-jet based in-bowl tool. A summary of
the test results is provided in Table 4.9.

146
part rotation pressure time range degrees (bar) (ms) 4 130~145 4.5 85~130 90 5 70~105 5.5 60~95
aluminum 4 180~195 prism 4.5 135~195
180 5 110~195 5.5 100~135 270 5.5 140~160
Table 4.9: Rectangular Aluminum Prism, Reorientation in the Track Plane
4.4.2 Orienting Parts in the Bowl Wall Plane
The test subjects were the same five parts as used previously. Reorientations leading to 270°
rotations were not observed with measurable consistency. Although multiple full rotations of
parts were observed, the results were hard to quantify. Often, the part would leave the track
and either fall to the bottom of the bowl or jump outside of the VBF.
The experiments with the connector housing were performed for the three different masses:
1.91, 4.91 and 7.65 grams. The corresponding results are summarized in Table 4.10, Table
4.11, and Table 4.12. A noteworthy observation from the test data is that the ability to reorient
the part 90° was directly proportional to the parts mass.

147
part rotation pressure time range degrees (bar) (ms)
connector 1 125~195 housing 180 1.5 60~75
Table 4.10: Connector Housing, m=1.91 g, Reorientation in the Bowl Wall Plane
part rotation pressure time range degrees (bar) (ms) 90 2.5 60~65
connector 1.5 135~195 housing 2 85~125 4.91 g 180 2.5 70~90
3 60~70
Table 4.11: Connector Housing, m=4.91 g, Reorientation in the Bowl Wall Plane
part rotation pressure time range degrees (bar) (ms) 2 125~150 90 2.5 95~110
connector 3 65 housing 2 155~195 7.65 g 180 2.5 115~195
3 70~95
Table 4.12: Connector Housing, m=7.65 g, Reorientation in the Bowl Wall Plane

148
The reorientation of the push-button switch was performed with ease when the air was acting
on the push-button end. The 180° angle of rotation was achievable for the pressure range
from 1.5 to 2.5 bars, as shown in Table 4.13. However, most of the time when the air was
applied to the base end, the reorientation was not successful. This was contributed to the low
coefficient of friction between the push-button and the track causing the switch to slide
backwards instead of rotating.
part rotation pressure time range degrees (bar) (ms) 1.5 115~195
push-button 180 2 75~95 switch 2.5 65~70
Table 4.13: Push-button Switch, Reorientation in the Bowl Wall Plane
For the next experiment, the solid-state relay was initially positioned with pins down, as
depicted in Figure 4.8. The results in Table 4.14 show that rotations of 90° and 180° were
successful. The results describing the reorientation of the wooden and the aluminum prism
are presented in Table 4.15 and Table 4.16, respectively.

149
part rotation pressure time range degrees (bar) (ms) 1.5 95~125 90 2 60~80 2.5 60
SSR 1.5 130~195 180 2 85~110 2.5 65~75
Table 4.14: Solid-state Relay, Reorientation in the Bowl Wall Plane
part rotation pressure time range degrees (bar) (ms) 2 130~140 90 2.5 90
wooden 3 80 prism 2 145~195
180 2.5 95~140 3 85~100
Table 4.15: Rectangular Wooden Prism, Reorientation in the Bowl Wall Plane

150
part rotation pressure time range degrees (bar) (ms) 3.5 195 4 100~135 90 4.5 70~90 5 60~70
aluminum 5.5 60 prism 4 140~195
4.5 95~195 180 5 75~100 5.5 65~75
Table 4.16: Rectangular Aluminum Prism, Reorientation in the Bowl Wall Plane
4.4.3 Reorienting Parts in the Plane Orthogonal to the Track and the Wall Plane
Table 4.17 represents the test results obtained when the five parts depicted in Figure 4.8 were
reoriented in the plane normal to the bowl track and to the bowl wall plane. The pressure
range was limited. Increasing the pressure above the range recorded in the table below led to
unreliable results. At pressures just above the successful range, the parts would hit the bowl
wall and bounce back. The rectangular wooden prism was the only part that could be reliably
reoriented 180°. It is believed that the rectangular aluminum prism would facilitate
dependable reorientation of 180°, however, the current test hardware could not provide an
adequate force.
Increasing the pressure well above the reliable operating range caused an interesting
phenomenon. Parts would climb the bowl wall, and jump out of the feeder.

151
part rotation pressure time range degrees (bar) (ms)
connector 1 85~115 housing 90 1.5 65~80
2 145~170 connector 2.5 105~130 housing 90 3 65~95 4.91 g 3.5 65~75
2.5 150~195 connector 3 85~150 housing 90 3.5 75~140 7.65 g 4 65~90
push-button 1.5 115~195 switch 90 2 65~140 SSR 90 2 90~105
3 125~195 wooden 90 3.5 90~195 prism 4 75~95
180 4 100~115 aluminum 5 190~195
prism 90 5.5 160~195
Table 4.17: Results: Reorienting Parts in the Plane Normal to the Track and the Wall Plane
4.5 Comparison of Simulation and Experimental Results
The results obtained by the simulation runs well matched the experimental results for the
lighter parts and smaller rotational angles. As a parts mass and the desired angle of rotation
increased the model predictions became less precise. Consistently, at larger angles the
simulations were showing lower required pressures then the ones obtained experimentally.

152
For reorientation of parts in the bowl track plane, when the desired part reorientation is π/2,
the model does not have to give an exact prediction. As long as the predicted angle of rotation
satisfies the boundary conditions (within the angular limits described in Section 2.7), the
reorientation will be successful. The inaccuracies of the tool, and therefore the model, are
compensated by the additional reorientation performed by the VBF after it is restarted.
Additional reorientations are valid for desired angles of π, and 3π/2, as well. For reorientation
of parts in the bowl wall plane, and the plane normal to the bowl wall and the track plane,
additional reorientations are performed by the parts gravity, leading precisely to the desired
orientation.

153
Chapter 5
CONCLUSION
5.1 Conclusions and Recommendations
In this study, air-jet based tools were developed for vibratory bowl feeders (VBF). Both
passive and active air-jet based in-bowl tools were studied.
Passive air-jet based tools were described and implemented as a substitution to VBFs classical
in-bowl tools. A classification of passive air-jet based tools used in feeding flat rectangular
parts was provided. The justifications for implementing passive air-jet based tools are their
simple designs and ease of adjustment. When coupled with sensory inputs they can be
successfully controlled by computers in feedback mode allowing greater flexibility than their
mechanical counterparts. Additionally, these tools eliminate jamming in feeders, a common
source of failures on the factory floor.
Active air-jet based tools were developed and successfully implemented. Their advantages
over the passive tools are an increase in the feed rate and possible applications in feeding
delicate parts. The three active tools studied in this research are capable of reorienting parts in
the track plane (yaw), in the bowl wall plane (pitch) and in the plane orthogonal to the track
and the bowl wall plane (roll).

154
For a rectangular part and all three active tools, the governing equations of motion were stated.
Based on these equations computer simulation models were derived for each tool. Using the
part and the system characteristics as inputs, the developed computer simulation algorithms
provided applicable pressure pulse duration pairs for the desired reorientation.
For the verification and fine-tuning of models, a VBF test bed was built. A VBF was equipped
with a variable amplitude regulator and computer-controlled air-jet based active tools. The
pressure of the air was controlled at the pressure source, while the duration of the air pulse was
controlled via a solenoid-actuated air valve. From a number of reoriented parts, five of them
were chosen for inclusion in this manuscript. A connector housing used in the automotive
industry with a mass of 1.91 g was the lightest sample part in the set. Filling the connector
holes with solder and lead allowed testing of the effect of a parts mass on the reorientation
process. A push-button switch and a solid-state relay are typical small parts used in circuit
board assemblies. The reorientation of these two parts by utilizing active air-jet based tools
demonstrated their immediate applicability in industry. In addition, by successfully modeling
and simulating the behavior of a complicated part like the push-button switch, the usefulness
of the theoretical analyses was proven in practice. A rectangular wooden prism was used for
its relatively large size, while a rectangular aluminum prism was employed to test the behavior
of the tools when the reoriented parts are relatively heavy.
During the course of experimental tool development, a number of challenges were
encountered. Their solutions resulted in recommendations that should be followed when
using active air-jet based tooling.

155
At the proof-of-concept stage, an air-jet was mounted in the side wall of the bowl feeder, and a
fiber-optic sensor was mounted in the track. The early application results were discouraging.
Only on rare occasions, the tools would perform as expected. Sometimes, even a direct blast
of air at high pressure wouldnt move a part. At other times, the same air-jet pulse would send
a part flying completely across the bowl. It was discovered that the part was often pulled
towards the air jet. After hitting the part, an air stream would change its direction and travel
along the surface of the part facing it. This, in turn, would cause a significant drop in pressure
with respect to the parts surface not facing the air jet, and push the part towards the bowl wall
(the airfoil effect). To minimize this influence on the part to be reoriented, the part is
separated from the bowl wall via an air barrier. The recommended thickness of an air
barrier is at least 3 mm for a 3.175 mm tube, and at least 6 mm for a 6.35 mm tube. These
values were obtained from a number of successfully performed experiments. In order to
minimize the parts area in contact with the air stream traveling along the part, the air barriers
should be mounted close to the air-jet nozzle.
With the air barriers mounted, another set of tests was performed. The tools were capable of
reorienting parts, however, unreliably. It was discovered that the initial position of a part was
random due to its erratic behavior during hopping along the bowl track. Given the nature of
the part hopping process, the prediction of its initial position was unachievable with the
current modeling tools. The solution to this problem was found in programmatically stopping
the VBF. Thus, when a part triggers the sensor, the control program stops the bowl feeder,
allows the part to stop, applies the air-jet tool to reorient the part, and then restarts the feeder.
This solution provided reliable part reorientation.

156
In order to increase the feed rate, the hopping method of part motion was chosen. By
increasing the bowl vibration amplitude, the parts average speed was increased. This again
caused unreliable operation of the active air-jet based tools. Through experiments, it was
discovered that the main reason for the unreliable tool behavior was the uncertainty in the
initial position of the parts to be oriented, which was in turn directly related to the bowl
vibration amplitude. The recommendation is not to increase the speed of parts beyond the
reliable operating range of the tools. Another possible solution could involve an additional
passive tool to return unsuccessfully oriented parts back into the bowl.
5.2 Research Contributions
The major research contributions of this dissertation are the description, development, analysis
and implementation of novel active air-jet based computer-controlled tools for vibratory bowl
feeders. The existing passive air-jet tools used in reorienting flat rectangular parts were
catalogued, and some novel tools presented.
The interactions between the air jet based tools and the parts to be reoriented were analyzed.
The resulting models led to successful predictions of required pressures and air-pulse
durations. These were used in the VBF control program to reorient parts into desired
orientations.
The early failures of the air-jet based tools were contributed to the airfoil effect. An original
solution was found and implemented in the form of air barriers.

157
The challenges dealing with high-speed implementations were met. The cause of low reliability
of active air-jet tools was identified by observing the part motion with a high-speed camera. It
was discovered that the low reliability was due to the erratic part behavior while hopping. This
problem was eliminated by stopping the VBF just before the tool action.
After a VBF operating at high vibration amplitude is stopped, the parts traveling at high speeds
would not stop at the same position consistently. The part stopping distance is identified as a
random variable. The minimum stopping distance, as well as its mean, is proportional to the
initial part velocity. Simulations demonstrated and experiments proved that the active air-jet
tools can tolerate to some extent the randomness of the part stopping distance.
5.3 Future Work
This research dealt with practical and implementation issues of active air-jet based tools. The
solutions proposed were simple and effective. The study of these novel tools opened an
avenue of new questions and challenges.
The analysis and sizing of air barriers was based on the fluid dynamics principles and
experiments. A deeper theoretical analysis of air barriers could give results that are more
precise. It could lead to the development of an air-jet based tool that is used to pull a part
towards it, or have some other interesting applications.
Further study of the parts stopping distance as a random variable might prove to be very
useful in tool applications dealing with high part velocities, and therefore high feed rates. The

158
task of tuning the air-jet based tools for particular VBF vibration amplitude would be easier if
the distribution function of the parts stopping distance was known.
In this manuscript, the active tools are applied to a set of rectangular parts. The variety of part
families could be expanded.
Extensive testing should be performed on the factory floor. This could give an additional
insight about problems not anticipated in this research. The next few paragraphs describe a
feasible development path for the air-jet based tools.
Practical integration of a part recognition system with air tools could be very beneficial in
increasing the flexibility of VBFs. A camera interfaced with a computer through a high-speed
data acquisition card could obtain the parts position/orientation and dimensions. Based on
this information and the desired orientation, an AI algorithm could provide an optimal
reorienting strategy (the order of tool actions with appropriate pressure pulse durations).
After the tools finish reorienting the part, the camera could ensure the part is in the desired
orientation.
The adaptable VBF may operate as a part of a larger assembly cell. The computer controlling
the cell could send information about the part geometry and the required feed rate to the
adaptable VBF. In response, the VBF would perform analysis of stable resting positions,
choose the position/orientation that will maximize the feed rate and reliability, calculate the
maximum feed rate and inform the host computer if the required feed rate can be achieved.

159
Then the parts to be fed would be placed into the bowl. The VBF would adjust its tools for
the set feed rate and start feeding parts at the command from the host computer.
Once microprocessor control is established a number of features can be implemented, like
feed rate monitoring, part counting, removal of dimensionally incorrect parts, etc. An
algorithm can be developed to facilitate feeding a number of different parts in small batches
from the same VBF and without operator intervention. These different parts could already be
present in the bowl feeder.
This manuscript described, analyzed and implemented a novel set of active air-jet based tools
for VBFs to allow their application in small and medium production runs. The real test is the
actual utilization on the factory floor.

160
APPENDICES

161
APPENDIX A
AIR JET CONTROL PROGRAM

162
/*********************************************************************** airjet.c **** Air jet Control Program **** Nebojsa I. Jaksic **** Date: May 21, 1998 **** modified: Jan. 18, 1999 ************************************************************************
This "C" program uses a timer to control a solenoid-actuated air-valvein a vibratory bowl feeder for part reorientation. The duration of theair jet pulse is controlled, however, the amount of the airflow throughthe valve is not. The variable time1 can be adjusted in increments of0.1 milliseconds. The program’s interface with sensors and actuators isthe parallel port. Parallel port pin 13 is used as an input while pins2 and 3 are used as outputs.
SENSORY INPUT to the program is a part detector circuit. The input tothe PC is obtained from a light source, acting as a switch, and an NPNphoto-Darlington. Sensitivity of the circuit is adjusted via a 100Kpotentiometer in series with a 470 Ohm resistor on the connector(power) side.
The OUTPUTS from the program control the air-jet air-valve solenoid,and a solid state relay (SSR) which in turn controls the power to thevibratory bowl feeder. The 5V air-valve solenoid output is sent throughtwo Schmidt trigger inverters (74ls14) and via a current limitingresistor of 470 Ohms to the base of mpsa13, an NPN transistor poweringthe 5V solenoid. The SSR output is sent through an inverter (74ls14) tothe input of the SSR.*/
#include <stdlib.h>#include <conio.h>#include <ctype.h>#include <stdio.h>#include <dos.h>#include <bios.h>
/* Function Declarations */
int FindSystemTimer(void); // Find the system timerint delay1(int); // Delay .1 millisecond * int
char key; // Keyboard bufferint rdtmr; // System timer done bit locationint i,j,k,x,time1; // General purpose global variables
#define PrinterPort 0x378 // define lpt1 for Output#define InputPort 0x379 // define lpt1 for input/*******************************************************************

163
FIND SYSTEM TIMER
In order to control outputs on computers that run at different speeds,a clock is needed that is independent of the processor speed. One ofthe system timers is suitable for this purpose. Usually, there arethree timers available to the programmer, identified as timers 1,2,and3. Timers 1 and 3 are most likely already in use by the system. Timertwo is a general purpose timer used to drive the speaker. Since thespeaker is not used in this program timer #2 is used for pulse/delaytiming.
The timer is programmed by doing three writes to I/O. The first writeis a control word written to 0x43. This first byte sets the "Mode" ofthe timer. The next two writes are to address 0x42. The low bytefollowed by the high byte of a 16 bit word becomes the "count" of thetimer. The timer decrements this word as directed by the mode. Timeis up when the count reaches '0'.
The output bit of the timer can vary from system to system so it has tobe determined (searched for) before it can be used. This search isperformed by the FindSystemTimer() function.
*******************************************************************/
int FindSystemTimer() // find terminal count bit and test timer
int x, i, j;
x = inportb(0x61); // get original valuex = (x & 0xfc) | 0x01; // disable speakeroutportb(0x61,x); // write it back w/disabled speakeroutportb(0x43,0xb6); // set timer mode, counter #2, load LSB/MSB
// 16 bit binary count, mode 3// (square wave output)
outportb(0x42,0x00); // set time constant LSBoutportb(0x42,0x01); // set time1 constant MSB
for(rdtmr = 0x61; rdtmr <= 0x62; rdtmr++) // look for correct output // byte either 0x61 or ox62
x = inportb(rdtmr) & 0x20;for(j = 0, i = 0; i < 1000; i++)
if(x == (inportb(rdtmr) & 0x20)) // wait for bit to changecontinue; // no change in bit
x ^= 0x20; // XORj++;
if(j >= 4) // if 4+ transitions we have found the correct bit
return(0); // found correct bitreturn(-1); // timer read not found, return error

164
int delay1(int n) // delay (n*.1ms)
int i;if(n==0)return(0);for (i=0;i<n;i++)
outportb(0x43,0xb0); // set timer mode, counter #2, load LSB/MSB// 16 bit binary count, mode 0// (output bit goes low at end of count)
outportb(0x42,0x20); // set time1 constant LSBoutportb(0x42,0x00); // set time1 constant MSBwhile((inportb(rdtmr) & 0x20) == 0); // wait for timer to finish
return(0);
void main()printf("\n air jet control program.........\n\n\n\n");
printf("*******************************************************\n");printf("* Valid keystrokes: *\n");printf("* '+' = Speed up *\n");printf("* '-' = Slow down *\n");printf("* 'q' = Quit *\n");printf("*******************************************************\n");
if(FindSystemTimer()<0) // find the system timer, quit if not foundprintf(" System Timer not found, Sorry");goto exit;
printf("\n\n\n\ntime1 in ms:\n");time1=1000;// Main Loop here ................................................do
while(!kbhit()); // watch for a key to be pressedkey=getch(); // get key and convert to lower casekey=tolower(key);
switch(key) // we have a keystroke, now decode it
case('1'): // 1 breaks outkey=0;do

165
while(!kbhit);key=getch();if(key=='1')break;if (key=='q')goto exit;while(key!='1');break;
case('+'): // '+' is to speed uptime1=time1-10;if(time1<=0)time1=0;printf(" Time in ms %5d \n ",time1/10);break; // end of case '+’
case('='): // '=' is to speed uptime1=time1-10;if(time1<=0)time1=0;printf(" Time in ms %5d \n ",time1/10);break; // end of case '=’ , like +
case('-'): // '-' is to slow downtime1=time1+10;if(time1==10000)time1=2;printf(" Time in ms %5d \n ",time1/10);break; // end of case '-'
case(32): // Space bar is to initiate the solenoid//wait for partwhile(((x=inportb(InputPort)^0x80)&0xf8)==248);outportb(PrinterPort,0x02);delay1(time1*5);outportb(PrinterPort,0x0f);delay1(time1);outportb(PrinterPort,0x02);delay(time1/2);outportb(PrinterPort,0x00);break;
// end of switch
while(key!='q'); // 'q' means quit the program
exit:;// <<<<<<<<<<<<<<<< E X I T P O I N T <<<<<<<<<<
//end of main

166
APPENDIX B
RESULTS
1. AIR-VALVE DYNAMICS TEST RESULTS
2. AIR-JET SPATIAL DISTRIBUTION TEST RESULTS

167
AIR-VALVE DYNAMICS TEST RESULTS

168
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.05 0.1 0.15 0.2
time (s)
Pres
sure
(bar
)
Figure 5.1: Air Jet Response P = 1.38 bar, f = 5 Hz, l=0.05 m
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.05 0.1 0.15 0.2
time (s)
pres
sure
(bar
)
Figure 5.2: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 1.5 m

169
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.05 0.1 0.15 0.2
time (s)
pres
sure
(bar
)
Figure 5.3: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 3 m
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.05 0.1 0.15 0.2
time (s)
pres
sure
(bar
)
Figure 5.4: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 4.5 m

170
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.5: Air Jet Response P = 1.38 bar, f = 5 Hz, l = 6 m
0
1
2
3
4
5
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.6: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 0.05 m

171
00.5
11.5
22.5
33.5
44.5
5
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.7: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 1.5 m
00.5
11.5
22.5
33.5
44.5
5
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.8: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 3 m

172
00.5
11.5
22.5
33.5
44.5
5
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.9: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 4.5 m
00.5
11.5
22.5
33.5
44.5
5
0 0.05 0.1 0.15 0.2 0.25
time (s)
pres
sure
(bar
)
Figure 5.10: Air Jet Response P = 4.14 bar, f = 5 Hz, l = 6 m

173
P=1.38 (bar)
f Square wave f Sinusoidal Wave f Triangular WaveHz Vmax Vmin Hz Vmax Vmin Hz Vmax Vmin
5 1.781 0.7656 5 1.75 0.7656 5 1.734 0.765610 1.75 0.7656 10 1.75 0.7656 10 1.719 0.765620 1.766 0.8281 20 1.703 0.7969 20 1.656 0.765630 1.594 0.9219 30 1.578 0.8438 30 1.328 0.7540 1.609 1.172 40 1.219 0.7656 32.57 0.8438 0.62550 1.781 1.469 41.15 0.9688 0.6562 40 0.7812 0.718760 2.203 1.406 50 0.7562 0.7 50 0.7562 0.7
69.69 1.359 0.125 69.93 1.359 0.9375
P=2.76 (bar)i
10 2.766 0.7187 10 2.703 0.7031 10 2.672 0.703120 2.719 0.9844 20 2.656 0.8438 20 2.484 0.765630 2.625 1.328 30 2.469 1.047 30 1.703 0.7540 2.563 1.562 40 1.781 0.8906 36.5 0.8594 0.640650 2.938 1.672 50 1.125 0.7344 40 0.7656 0.687560 2.172 0.3594 50.63 0.7656 0.6406 50 0.7656 0.7031
62.63 2.141 0.125 60 0.7656 0.6875 70 0.9219 0.09375
85.47 2.469 0.2031 P=4.14 (bar)
10 3.813 0.7812 10 3.719 0.7187 10 3.688 0.687520 3.719 1.344 20 3.594 1.062 20 3.313 0.87530 3.563 1.687 30 3.125 1.212 30 2.281 0.812540 3.344 0.1563 40 2.688 1.344 38.24 0.9063 0.640650 2.938 0.1563 50 1.562 0.8348 40 0.8438 0.656260 2.844 0.875 53.33 0.9531 0.6719 50 0.7812 0.6562
64.52 2.859 0.7187 60 0.7187 0.6406 70 3.125 0.7187
79.37 3.281 1 80 3.781 1.781
Table 5.1: Frequency Response Test Data for Humphreys 401 Micro Solenoid Air Valves

174
AIR-JET SPATIAL DISTRIBUTION TEST RESULTS

175
The experimental data presented in this subsection supports the analysis of the air-jet force in
Section 2.5. Based on the data in the tables below, and using MATLAB plotting routines,
Figure 2.18 is obtained.
The test bed for these experiments consisted of an air jet secured at a distance of 5.5 inches
(139.7 mm) and pointing to a target (a precision scale) capable of measuring the force of the air
jet. At the beginning of each experiment, the force of air from the air jet acting on the target
was measured. Next, at a specified distance between the air-jet nozzle and the target, an orifice
was centered. Then, the force the air exerted on the target was measured again. The diameter
size of the orifice was varied resulting in corresponding variations in the force of air acting
against the target. When that force was within a couple percent of the force of the air without
an orifice it was assumed that the most of the air escaped through the orifice. That orifice
diameter determined the diameter of the air jet at the measured distance from the nozzle.
The experiments were divided into five groups. For each group a different air-jet force was
chosen (0.021 N, 0.051 N, 0.126 N, 0.32 N, and 0.632 N). For instance, the first row in , max
Fa (g) (2.14 g) presents the maximum force in grams measured at the target distance of 5.5 in
(139.7 mm) before each experiment. Observed variations were contributed to the use of air
elsewhere (the machine shop). There were 11 experiments in each experimental group
representing 11 distances between the nozzle and the orifices. The second row in dist
orif/targ(in) presents the distance from an orifice to the target in inches. The third row D
(in)\dist(mm) shows calculated distances from the nozzle of the air jet to an orifice in
millimeters. Eighteen measurements, each with a different orifice diameter (columns

176
D(in)\dist(mm) in inches and D (mm)calculated in millimeters), were performed during
each experiment.
In the data analysis stage, from an applicable experiment, a coordinate point for Figure 2.18
was selected. For each experimental group, the coordinates (distance from the nozzle, orifice
diameter) were entered in the MATLAB program given below, and plotted.

m
ax F
a (g
) 2.
142.
082.
122.
12.
07
2.07
2.05
2.05
2.05
2.05
2.05
di
st o
rif/ta
rg(in
)5.
35
4.8
4.6
4.4
4.2
43.
83.
63.
43.
2D
(mm
) D
(in)
\dis
t(mm
) 5.
0812
.717
.78
22.8
627
.94
33.0
238
.143
.18
48.2
653
.34
58.4
23.
175
0.12
52
1.63
1.25
0.8
0.56
0.55
0.3
0.26
0.2
0.14
0.1
3.57
1875
0.14
0625
2.07
1.75
1.4
1.05
0.78
0.71
0.39
0.32
0.27
0.18
0.14
3.96
875
0.15
625
2.08
1.84
1.6
1.28
0.85
0.8
0.5
0.34
0.3
0.22
0.18
4.36
5625
0.17
1875
2.08
1.95
1.7
1.38
1.13
0.91
0.65
0.48
0.37
0.27
0.21
4.76
250.
1875
2.08
21.
841.
541.
31.
070.
90.
630.
460.
350.
265.
1593
750.
2031
252.
082.
031.
91.
621.
291.
120.
950.
70.
540.
40.
275.
5562
50.
2187
52.
082.
032
1.73
1.5
1.3
1.07
0.81
0.61
0.47
0.28
5.95
3125
0.23
4375
2.09
2.03
21.
81.
631.
41.
160.
920.
650.
490.
396.
350.
252.
092.
042
1.86
1.72
1.5
1.26
10.
810.
550.
456.
7468
750.
2656
252.
092.
072
1.93
1.74
1.56
1.34
1.08
0.92
0.62
0.5
7.14
375
0.28
125
2.09
2.08
2.02
1.96
1.8
1.67
1.38
1.18
10.
720.
537.
5406
250.
2968
752.
092.
082.
022
1.86
1.72
1.47
1.3
1.05
0.81
0.67
7.93
750.
3125
2.09
2.08
2.08
2.04
1.87
1.73
1.53
1.35
1.14
10.
758.
3343
750.
3281
252.
092.
082.
082.
081.
921.
81.
651.
461.
21.
010.
838.
7312
50.
3437
52.
092.
082.
092.
081.
961.
851.
71.
511.
341.
160.
979.
1281
250.
3593
752.
12.
082.
092.
082.
011.
911.
781.
571.
381.
181
9.52
50.
375
2.11
2.08
2.09
2.08
2.04
1.93
1.8
1.6
1.47
1.3
1.1
10.3
1875
0.40
625
2.11
2.08
2.09
2.08
2.04
1.97
1.9
1.72
1.62
1.46
1.3
Tabl
e 5.
2: A
ir Je
t Spa
tial D
istrib
utio
n D
ata
for M
axim
um A
ir-je
t For
ce o
f 0.0
21 N
177

m
ax F
a (g
) 5.
25.
065.
065.
035.
035.
55.
45.
45.
45.
45.
4
dist
orif
/targ
(in)
5.3
54.
84.
64.
44.
24
3.8
3.6
3.4
3.2
D (m
m)
D (i
n)\d
ist(m
m)
5.08
12.7
17.7
822
.86
27.9
433
.02
38.1
43.1
848
.26
53.3
458
.42
3.17
50.
125
4.7
3.9
3.1
2.4
1.9
1.6
1.1
0.75
0.5
0.3
0.2
3.57
1875
0.14
0625
4.96
4.1
3.4
2.8
2.3
1.9
1.2
0.9
0.8
0.4
0.33
3.96
875
0.15
625
4.96
4.5
3.7
3.1
2.6
2.1
1.7
10.
90.
60.
44.
3656
250.
1718
755
4.7
3.9
3.6
2.8
2.4
21.
61.
10.
70.
474.
7625
0.18
755
4.8
4.5
3.9
2.9
2.9
2.3
1.8
1.6
0.9
0.6
5.15
9375
0.20
3125
54.
94.
54
3.5
3.2
2.5
21.
71
0.7
5.55
625
0.21
875
5.1
4.9
4.7
4.3
3.7
3.4
2.9
2.3
1.7
1.2
0.8
5.95
3125
0.23
4375
5.1
54.
84.
53.
93.
63.
12.
52
1.5
16.
350.
255.
15
4.9
4.7
4.1
43.
42.
82.
21.
81.
16.
7468
750.
2656
255.
15
4.9
4.7
4.3
4.2
3.6
3.1
2.5
1.9
1.2
7.14
375
0.28
125
5.1
54.
94.
94.
54.
43.
83.
32.
62
1.4
7.54
0625
0.29
6875
5.1
55
4.9
4.7
4.5
43.
52.
92.
21.
77.
9375
0.31
255.
15
54.
94.
74.
64.
13.
63.
12.
52
8.33
4375
0.32
8125
5.1
55
4.9
4.8
4.8
4.4
3.9
3.2
2.9
2.3
8.73
125
0.34
375
5.1
55
54.
94.
84.
53.
93.
53.
12.
79.
1281
250.
3593
755.
15
55
4.9
5.1
4.7
4.2
3.7
3.2
2.7
9.52
50.
375
5.1
55
54.
95.
24.
84.
43.
93.
42.
910
.318
750.
4062
55.
15
55
4.9
5.3
54.
74.
23.
73.
2
Tabl
e 5.
3: A
ir Je
t Spa
tial D
istrib
utio
n D
ata
for M
axim
um A
ir-je
t For
ce o
f 0.0
51 N
178

m
ax F
a (g
) 12
.712
.712
.712
.612
.612
.613
.212
.812
.712
.612
.6
dist
orif
/targ
(in)
5.3
54.
84.
64.
44.
24
3.8
3.6
3.4
3.2
D (m
m)
D (i
n)\d
ist(m
m)
5.08
12.7
17.7
822
.86
27.9
433
.02
38.1
43.1
848
.26
53.3
458
.42
3.17
50.
125
12.2
9.5
7.8
5.9
5.1
4.3
2.2
1.6
1.1
0.8
0.4
3.57
1875
0.14
0625
12.4
10.5
8.7
6.8
1.7
4.7
2.6
1.9
1.3
0.9
0.6
3.96
875
0.15
625
12.5
11.5
9.6
8.1
6.5
5.3
4.6
2.6
1.6
1.3
0.9
4.36
5625
0.17
1875
12.5
11.7
10.4
8.6
7.5
6.1
53.
22.
11.
61.
44.
7625
0.18
7512
.611
.711
.29.
78.
46.
85.
84.
82.
82.
14.
85.
1593
750.
2031
2512
.611
.711
.410
.29
7.6
6.1
5.1
3.1
2.3
25.
5562
50.
2187
512
.612
.211
.710
.69.
68.
47
5.7
4.6
2.6
2.2
5.95
3125
0.23
4375
12.6
12.3
1211
.210
97.
46.
24.
72.
82.
46.
350.
2512
.612
.312
.111
.610
.69.
48.
16.
65.
33.
52.
76.
7468
750.
2656
2512
.612
.312
.311
.810
.79.
98.
57.
15.
64.
63
7.14
375
0.28
125
12.6
12.3
12.3
11.9
11.1
9.8
8.8
7.9
6.3
5.2
47.
5406
250.
2968
7512
.612
.512
.312
.111
.610
.29.
68.
26.
55.
34.
17.
9375
0.31
2512
.612
.512
.412
.111
.910
.910
8.4
7.2
5.8
4.5
8.33
4375
0.32
8125
12.6
12.5
12.5
12.1
11.9
11.2
10.4
9.1
7.3
6.1
4.7
8.73
125
0.34
375
12.6
12.5
12.5
12.3
12.2
11.4
10.6
9.5
8.2
75.
49.
1281
250.
3593
7512
.612
.512
.512
.412
.211
.712
1110
8.7
7.2
6.1
9.52
50.
375
12.6
12.6
12.6
12.5
12.3
12.1
11.2
10.2
8.9
7.8
6.8
10.3
1875
0.40
625
12.6
12.6
12.6
12.5
12.4
12.4
11.7
10.6
9.7
8.9
7.6
Tabl
e 5.
4: A
ir Je
t Spa
tial D
istrib
utio
n D
ata
for M
axim
um A
ir-je
t For
ce o
f 0.1
26 N
179

m
ax F
a (g
) 35
.635
.535
.535
.535
.535
.5
35.5
35.5
35.5
35.5
35.5
di
st o
rif/ta
rg(in
)5.
35
4.8
4.6
4.4
4.2
43.
83.
63.
43.
2D
(mm
) D
(in)
\dis
t(mm
) 5.
0812
.717
.78
22.8
627
.94
33.0
238
.143
.18
48.2
653
.34
58.4
23.
175
0.12
534
.729
.224
.519
.616
.411
.511
.16.
73.
42.
40.
83.
5718
750.
1406
2535
29.8
26.3
21.5
18.5
13.8
11.6
8.5
4.6
3.5
1.3
3.96
875
0.15
625
3532
.227
.824
.221
.216
.313
.410
6.1
4.1
1.6
4.36
5625
0.17
1875
3533
.630
.626
.522
1815
.411
.78.
55
3.1
4.76
250.
1875
3535
3228
.726
22.4
18.3
1410
.46.
74.
85.
1593
750.
2031
2535
3533
.230
.227
23.3
2015
.811
.78.
16.
25.
5562
50.
2187
535
35.2
3431
.628
.924
.121
.417
.814
10.2
7.2
5.95
3125
0.23
4375
3535
.234
.332
.730
.125
.723
.419
.515
127.
46.
350.
2535
35.3
3533
.631
.727
.624
.621
17.1
13.2
8.5
6.74
6875
0.26
5625
3535
.335
.134
.232
.529
.326
22.5
18.7
15.1
9.8
7.14
375
0.28
125
3535
.335
.334
.533
.330
.527
.624
.320
15.6
11.1
7.54
0625
0.29
6875
3535
.335
.334
.833
.531
28.7
25.2
22.1
18.2
15.7
7.93
750.
3125
3535
.335
.335
.134
.232
.330
26.2
23.1
19.8
16.5
8.33
4375
0.32
8125
3535
.335
.335
.334
.833
31.4
27.8
24.8
21.5
17.2
8.73
125
0.34
375
3535
.335
.335
.335
33.3
32.2
29.3
26.3
2318
.59.
1281
250.
3593
7535
35.4
35.4
35.3
35.1
34.2
32.6
30.1
27.5
24.4
19.8
9.52
50.
375
3535
.435
.435
.335
.334
.733
.231
.128
.225
.221
.110
.318
750.
4062
535
35.4
35.4
35.3
35.3
3534
32.6
30.5
27.6
23.7
Tabl
e 5.
5: A
ir Je
t Spa
tial D
istrib
utio
n D
ata
for M
axim
um A
ir-je
t For
ce o
f 0.3
2 N
180

m
ax F
a (g
) 64
.464
.464
.464
.464
.464
.4
64.4
64.4
64.4
64.4
64.4
di
st o
rif/ta
rg(in
)5.
35
4.8
4.6
4.4
4.2
43.
83.
63.
43.
2D
(mm
) D
(in)
\dis
t(mm
) 5.
0812
.717
.78
22.8
627
.94
33.0
2 38
.143
.18
48.2
653
.34
58.4
23.
175
0.12
557
.851
3833
.525
.618
10
.59.
27.
53.
51.
83.
5718
750.
1406
2564
5345
37.2
3124
.7
18.2
139.
17
43.
9687
50.
1562
564
56.5
4942
34.3
27.5
21
.118
.212
.511
.34.
24.
3656
250.
1718
7564
.257
5245
37.3
32
25.5
20.5
1311
.58.
54.
7625
0.18
7564
.262
54.2
5043
.732
29
22.5
15.4
16.3
9.2
5.15
9375
0.20
3125
64.3
62.2
58.2
5045
38
29.1
25.3
21.6
1710
.75.
5562
50.
2187
564
.363
.560
5449
.839
.5
3729
.324
19.6
12.2
5.95
3125
0.23
4375
64.3
6460
.256
51.2
45
39.2
31.4
26.2
21.2
14.5
6.35
0.25
64.3
6462
.458
.654
.547
.3
42.8
3527
.923
.615
.86.
7468
750.
2656
2564
.364
6360
56.8
50.5
45
3830
26.1
21.1
7.14
375
0.28
125
64.3
64.1
63.5
62.3
5851
.3
4740
.532
.627
.521
.87.
5406
250.
2968
7564
.464
.163
.762
.459
.454
.2
50.1
43.4
35.2
28.4
23.6
7.93
750.
3125
64.4
64.2
63.9
62.8
60.3
56.1
51
43.8
39.8
3426
.88.
3343
750.
3281
2564
.564
.264
.363
.261
.156
.9
53.5
47.8
42.2
36.2
29.5
8.73
125
0.34
375
64.6
64.3
64.3
63.8
62.5
58.5
55
48.8
43.5
38.1
33.1
9.12
8125
0.35
9375
64.7
64.3
64.3
64.1
63.2
60.3
56
.551
.346
4035
.29.
525
0.37
564
.764
.664
.564
.363
.760
.9
57.1
52.8
48.2
42.6
37.2
10.3
1875
0.40
625
64.7
64.7
64.6
64.3
63.8
62.9
60
57.2
5246
.641
Tabl
e 5.
6: A
ir Je
t Spa
tial D
istrib
utio
n D
ata
for M
axim
um A
ir-je
t For
ce o
f 0.6
32 N
181

182
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% air_cone %% Nebojsa Jaksic %% Date: 12/16/99 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% This MATLAB program is used to plot air-cones: distance from% the nozzle (mm) vs. the diameter of the orifice (mm) through% which most of the air escapes, for different max. air-jet% forces (N)%
% dist = the distance from the nozzle in mmdist=[5.08 12.7 17.78 22.86 27.94 33.02 38.1...
43.18 48.26 53.34 58.42];% dist1 = applicable distancesdist1=[5.08 12.7 17.78 22.86 27.94 33.02];%for 2.1 grams (.0206 N) - assume 2 g: most of the air escapesD1=[3.175 4.7625 5.55625 7.540625 9.128125 10.31875];
%for 5.2 grams (.051 N) - assume 4.9 g: most of the air escapesdist2=[5.08 12.7 17.78 22.86 27.94 33.02 38.1];D2=[3.571875 5.159375 6.35 7.14375 8.73125 9.128125 10.31875];
%for 12.8 grams (.1256 N) - assume 12.3 g: most of the air escapesdist3=[5.08 12.7 17.78 22.86 27.94 33.02];D3=[3.571875 5.55625 6.746875 8.334375 9.128125 10.31875];
%for 35.6 grams (.3198 N) - assume 35 g: most of the air escapesdist4=[5.08 12.7 17.78 22.86 27.94 33.02];D4=[3.571875 4.7625 6.35 7.540625 8.73125 10.31875];
%for 64.4 grams (.6318 N) - assume 64 g: most of the air escapesdist5=[5.08 12.7 17.78 22.86 27.94];D5=[3.571875 5.953125 7.540625 8.73125 9.525];
%plotting routinesplot(dist1,D1,'b-');grid on;ylabel('cone diameter (mm)');xlabel('distance from air jet (mm)');hold on;
plot(dist2,D2,'r-');plot(dist3,D3,'g-');plot(dist4,D4,'k-');plot(dist5,D5,'k--');hold off;

183
Bibliography 1 J. Rodrigues, How to Plan a Robot-Based Automated Molding Cell, Robotics Today, Vol. 9, No. 3,
1996.
2 G. Boothroyd, C. Poli, and L. E. Murch, Automatic Assembly, pp.27-147, Marcel Dekker Inc., New York, 1982.
3 G. Boothroyd, Assembly Automation and Product Design, pp.31-94 Marcel Dekker Inc., New York, 1992.
4 B. R. Carlisle, Robot Technology and System Integration, International symposium of Experimental Robotics, Stanford University, June 1995. Keynote address at the symposium.
5 Vibromatic. Personal Communication, 1999. Vibromatic Company, Inc., located in Noblesville, Indiana, sells part feeders and orientation systems.
6 S. Okabe, and Y. Yokoyama, Study on Vibratory Feeders: Calculation of Natural Frequency of Bowl-Type Vibratory Feeders, ASME Journal of Mechanical Design, Vol. 103, pp. 249-256, 1981.
7 Robert A. Regent, Research and Development of a Systems Model of a Vibratory Bowl Feeder, Unpublished Masters Thesis in Industrial and Systems Engineering, The Ohio State University, 1985.
8 S. Okabe et al. Vibratory Feeding by Nonsinusoidal Vibration - Optimum Wave Form, Journal of Vibration, Acoustics, Stress, and Reliability in Design, Vol. 107, pp. 188-195, 1985.
9 K. Srinath and R. Karmakar, Vibratory Conveying by Non-Sinusoidal Excitation, Proceedings of the Institute of Mechanical Engineers, Mechanical Engineering Science, Vol. 202, No. C6, pp. 405-408, 1988.
10 F. E. Smith, Applying Vibratory Bowl Type Feeders, Automation, Jan. 1963.
11 C. Ou-Yang, A Computer Analysis of Parts Feeding Feasibility in a Vibratory Bowl Feeder, Ph.D. Dissertation, The Ohio State University, 1991.
12 G. P. Maul, and C. Ou-Yang, A Computer Analysis of Orientation Devices for Vibratory Bowl Feeders, International Journal of Production Research, Vol. 31, No. 3, pp. 555-578, 1993.
13 P. S. Tan, at. al. A Knowledge-based Advisor for the Automatic Selection and Sequencing of Orienting Devices for Vibratory Feeding, Engineering Applications and Artificial Intelligence, Vol. 8. No. 1, pp. 1 - 13, 1995.
14 C. Ou-Yang, A Study of Workpiece Sequencing in a Sensor base Vibratory Bowl Feeder, Master Thesis, The Ohio State University, 1986.
15 G. P. Maul, C. Ou-Yang, Predicting the Cycle Time for a Sequence of Parts in a Sensor Based Vibratory Bowl Feeder, Int. J. Prod. Res., Vol. 25, No. 12, pp. 1705 - 1714, 1987.
16 N. I. Jaksic, A Study of the Touching/Overlapping Parts Problem in a Sensor Based Vibratory Bowl Feeder, Masters Thesis, The Ohio State University, 1992.
17 G. P. Maul, M. B. Thomas, A Systems Model and Simulation of the Vibratory Bowl Feeder, Journal of Manufacturing Systems, Vol. 16, No. 5, pp. 309 314, 1997.
18 L. E. Murch, G. Boothroyd, Predicting Efficiency of Parts Orienting Systems, Automation, Vol. 18, 1971.

184
19 A. D. Christiansen, A. D. Edwards, C. A. Coelo Coelo, Automated Design of Part Feeders using a
Genetic Algorithm, In Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Vol. 1, pp. 846-851, 1996.
20 D. R. Berkowitz, J. Canny, Designing Parts Feeders using Dynamic Simulation, In Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Vol. 2, pp. 1127-1132, 1996.
21 D. R. Berkowitz, J. Canny, A Comparison of Real and Simulated Designs for Vibratory Parts Feeding, In Proceedings of the 1997 IEEE International Conference on Robotics and Automation, Vol. 3, pp. 2377-2382, 1997.
22 B. V. Mirtich, Impulse-based Dynamic Simulation of Rigid Body Systems, Dissertation, University of California at Berkeley, Fall 1996.
23 B. Mirtich, J. Canny, Impulse-based Simulation of Rigid Bodies, Symposium on Interactive 3D Graphics, ACM Press. N.Y., 1995.
24 M. Erdmann and M. T. Mason, An Exploration of Sensorless Manipulation, IEEE Journal of Robotics and Automation, pp. 4(4):369-379, Aug. 1988.
25 K. F. Bohinger, V. Bhatt, and K. Y. Goldberg, Sensorless Manipulation Using Transverse Vibrations of a Plate, IEEE International Conference on Robotics and Automation, Nagoya, Japan, May 1995.
26 M. A. Peshikin and A. C. Sanderson, Planning Robotic Manipulation Strategies for Workpieces that slide, IEEE Journal of Robotics and Automation, 4(5):524-531, Oct. 1988.
27 J. Wiegley, K. Y. Goldberg, M. Peshkin, and M. Brokowski, A Complete Algorithm for Designing Passive Fences to Orient Parts, IEEE International Conference on Robotics and Automation, Apr. 1996.
28 M. Mani and W. R. D. Wilson, A Programmable Orienting System for Flat Parts, North American Manufacturing Research Institute Conference XIII, Berkeley, California, May 1985.
29 M. T. Mason, Mechanics and Planning of Manipulator Pushing Operations, International Journal of Robotics Research, 5(3):53-71, 1986.
30 S. Akella, W. H. Huang, K. M. Lynch, and M. T. Mason, Sensorless Parts Orienting with a One-joint Manipulator, IEEE International Conference on Robotics and Automation, Albuquerque, NM, Apr. 1997.
31 K. Y. Goldberg, Orienting Polygonal Parts Without Sensors, Algorithmica, 10(2/3/4):201-225, 1993.
32 D. D. Grosmann and M. W. Blasgen, Orienting Mechanical Parts by Computer-controlled Manipulator, IEEE Transactions on Systems, Man, and Cybernetics, 5(5), September 1975.
33 R. H. Taylor, M. T. Mason, and K. Y. Goldberg, Sensor-based Manipulation Planning as a Game with Nature, In R. C. Bolles and B. Roth, editors, Robotics Research: The Fourth International Symposium, pp. 421-429, MIT Press, Cambridge, MA, 1988.
34 A. S. Rao and K. Y. Goldberg, Shape from Diameter: Recognizing Polygonal Parts with a Parallel-jaw Gripper, International Journal of Robotics Research, 13(1):16-37, Feb. 1994.
35 S. Akella, Robotic Manipulation for Parts Transfer and Orienting: Mechanics, Planning, and Shape Uncertainty, PhD thesis, The Robotics Institute, Carnegie Mellon University, Dec. 1996. Robotics Institute Technical Report CMU-RI-TR-96-38.
36 S. Akella and M. T. Mason, Parts Orienting with Partial Sensor Information, IEEE International Conference on Robotics and Automation, May 1998.

185
37 M. Caine, The Design of Shape Interactions Using Motion Constraints, In Proceedings of the
1994 IEEE International Conference on Robotics and Automation, Vol. 1, pp. 366-371, 1994.
38 A. D. Khazan, Transducers and Their Elements, Design and Application, Prentice Hall, pp. 117-162, 1994.
39 A. J. Cronshaw, W. B. Heginbotham, and A. Pugh, A Practical Vision System for Use With Bowl Feeders, Robot Sensors: Volume I Vision, U.K., 1986.
40 G. P. Maul, N. I. Jaksic, Sensor-Based Solution to Contiguous and Overlapping Parts in Vibratory Bowl Feeders, Journal of Manufacturing Systems, Vol. 13, No. 3, pp. 190195, 1994.
41 SDK-86, MCS-86 System Design Kit, Users Guide, Intel Corporation, CA
42 G. P. Maul, The Adaptively Controlled Parts Feeder Concept, Automated Assembly, SME, pp. 142-156, 1986.
43 EXAIR catalog, EXAIR Corporation, Cincinnati, OH, pp. 19-24, 1999.
44 Humphrey Pneumatic Valves, Humphrey Products Company, Kalamazoo, MI, pp. 32-33, 1994.
45 H. L. Stewart, Hydraulic and Pneumatic Power for Production, Revised Fourth Edition, Industrial Press, Inc. N.Y., pp.29.1-29.4, 1977.
46 A. Esposito, Fluid Power with Applications, Fourth Edition, Prentice Hall, 1999.
47 MINITAB Release 12: Minitab Users Guide 2: Data Analysis and Quality Tools, Minitab Inc. pp. 2.1-2.58, 1998.
48 KODAK EKTAPRO HS Motion Analyzer, Model 4540, Manual, Eastman Kodak Company, Motion Analysis Systems Division, http://www.kodak.com/US/en/digital/genInfo/masd/ masd4540.shtml, 1999.
49 W. E. Snyder, Industrial Robots - Computer Interfacing and Control, Prentice Hall, pp. 109-124, 1985.
50 J. H. Mathews, K. D. Fink, Numerical Methods Using MATLAB, Third Edition, Prentice Hall, pp. 342-458, 1999.
51 Using MATLAB Version 5, The MathWorks, Inc. Natick, MA, pp. 10.1-12.22, 1997.
52 MATLAB Release 11: New Features, The MathWorks, Inc., Natick, MA, pp. 1.23-1.25, 1999.
53 F. M. White, Fluid Mechanics, Second Edition, McGraw-Hill Inc., pp. 287-440, 1986.
54 R. W. Fox, A. T. McDonnald, Introduction to Fluid Mechanics, Fifth Edition, John Wiley & Sons, pp. 332-493, 1999.
55 The Pressure Strain and Force Handbook, Omega Engineering Inc., pp. B.28-B.29, 1999.
56 AT-MIO-16X User Manual, National Instruments Corp., Austin, TX, 1993.
57 L. K. Wells, J. Travis, LabVIEW for Everyone, Prentice-Hall, 1997.
58 G. W. Johnson, LabVIEW Graphical Programming, Second Edition, McGraw-Hill, pp.375-432, 1997.
59 R. Jamal, H. Pichlik, LabVIEW Applications and Solutions, Prentice-Hall, pp. 31-118, 1999.
60 J. Essick, Advanced LabVIEW Labs, Prentice-Hall, pp. 1-135, 1999.
61 J. Axelson, Parallel Port Complete, Peer-to-Peer Communications, February 1997.
62 Crydom Catalog, http://www.crydom.com/assets/ssrpan/s1.pdf , Crydom Corp., San Diego, CA, Controls manufacturer, 1999.






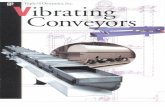









![A Solution to Contiguous and Overlapping Parts in Sensor ...faculty.csupueblo.edu/n.jaksic/Papers/IJMS94.pdfinto vibratory and nonvibratory feeders [4]. The most versatile and the](https://static.fdocuments.us/doc/165x107/60266bfce003cf1bdc3324ae/a-solution-to-contiguous-and-overlapping-parts-in-sensor-into-vibratory-and.jpg)