PROCESS MODELLING AND MODEL ANALYSIS © CAPE Centre, The University of Queensland Hungarian Academy...
28
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences PROCESS MODELLING AND MODEL ANALYSIS Analysis of Dynamic Process Models C13
-
Upload
damaris-milem -
Category
Documents
-
view
215 -
download
2
Transcript of PROCESS MODELLING AND MODEL ANALYSIS © CAPE Centre, The University of Queensland Hungarian Academy...

© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Analysis of
Dynamic Process Models
C13

2
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Overview of Dynamic Analysis
Controllability and observability Stability Structural control properties Model structure simplification Model reduction

3
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
State Controllability
A system is said to be “(state) controllable” if for any t0 and any initial state x(t0)= x0 and any final state xf, there exists a finite time t1> t0 and control u(t), such that x(t1)= xf
nrank has , ... ,,,
matrixility controllab theiff lecontrollab is
equation state with thesystem LTIA
12 BABAABBU
BuAxx
n
4
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
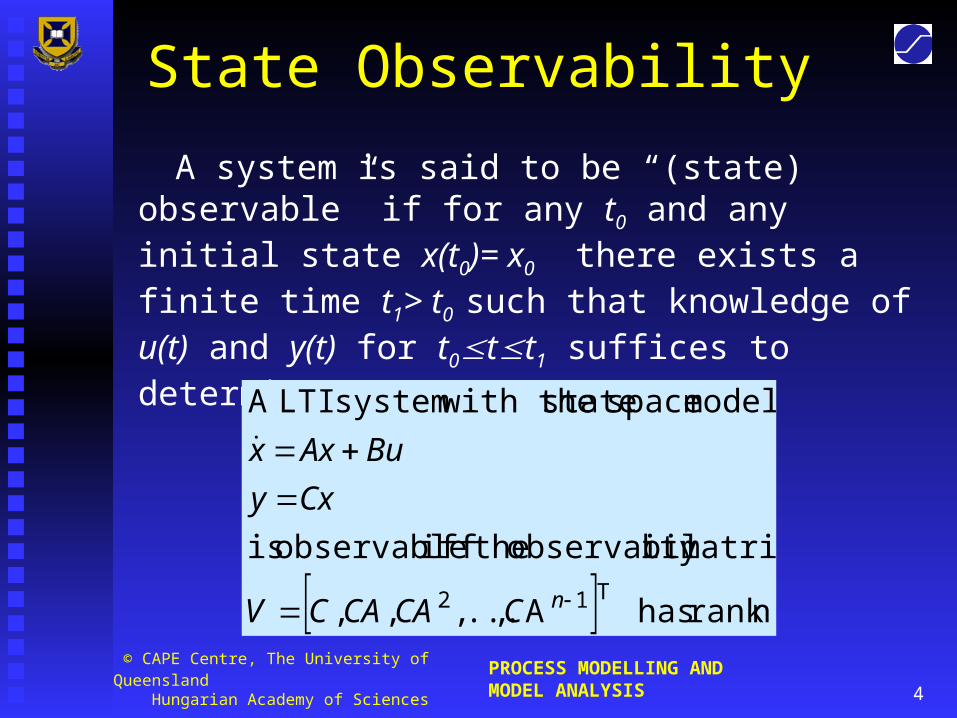
State Observability
A system is said to be “(state) observable” if for any t0 and any initial state x(t0)= x0 there exists a finite time t1> t0 such that knowledge of u(t) and y(t) for t0tt1 suffices to determine x0
nrank has A, ... ,,,
matrixity observabil theiff observable is
model space state with thesystem LTIA
T12
nCCACACV
Cxy
BuAxx

5
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
MATLAB functions (V4.2)
Controllability
Observability
)()(
states eduncontroll %
),(
corankAlengthunco
BActrbco
)()(
states unobserved %
),(
obrankAlengthunob
CAobsvob

6
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Example
2
11
2
1
2
1
04761.09558.1
0
1
00415.50
0415.501847.7
x
xy
ux
x
x
x
Model equations
Controllability2)( ;
50.04150
7.1847-1.0),(
];0;1 [
0]; 50.0415 ;0415.50 1847.7[
corankBActrbco
B
A
2)( ;97.8712-16.4343-
0.0476- 1.9558),(
0.04761];- 1.9558[
0]; 50.0415 ;0415.50 1847.7[
obrankCAobsvob
C
A
Observability

7
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Stability of systems - overview Two stability notions
- bounded input bounded output (BIBO) - asymptotic stability
Testing asymptotic stability of LTI systems MATLAB functions (e.g. eig(A)) Stability of nonlinear process systems
- Lyapunov’s principle

8
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
BIBO Stability
A system is said to be “bounded input, bounded output (BIBO) stable” if it responds with a bounded output signal to any bounded input signal, i.e.
BIBO stability is external stability
norm. signal a is ||.|| where
|||| ||||
then ][ if
yu
uy
S

9
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Asymptotic Stability
A system is said to be “asymptotically stable” if for a “small” deviation in the initial state the resulting “perturbed” solution goes to the original solution in the limit, i.e.
asymptotic stability is internal stability
norm. vector a is ||.|| where
if 0 ||)()(||
then ||||whenever 0
000
ttxtx
xx

10
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Asymptotic Stability of LTI Systems
A LTI system with state space realization matrices (A,B,C) is asymptotically stable if and only if all the eigenvalues of the state matrix A have negative real parts, i.e.
asymptotic stability is a system property
iR allfor 0 }e{ Ai,

11
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
MATLAB Function and Example
2
11
2
1
2
1
04761.09558.1
0
1
00415.50
0415.501847.7
x
xy
ux
x
x
x
Model equations
Analysis
i
i
Aeig
A
49.9124 3.5924-
49.9124 3.5924-
)(
0]; 50.0415 ;0415.50 1847.7[
Stable!

12
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Asymptotic Stability of Nonlinear Systems
Lyapunov principle: construct a generalized energy function V for the system, such that:
If such a V exists then the system is asymptotically stable
)(every for 0 )( :
)( , 0 :
txxdt
dVitydissipativ
xVV(x)itenesspos. defin

13
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Structural properties of systems
A dynamic system possesses a structural property if “almost every” system with the same structure has this property (“same structure” = identical structure graph)
Properties include:Structural controllabilityStructural observabilityStructural stability
14
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
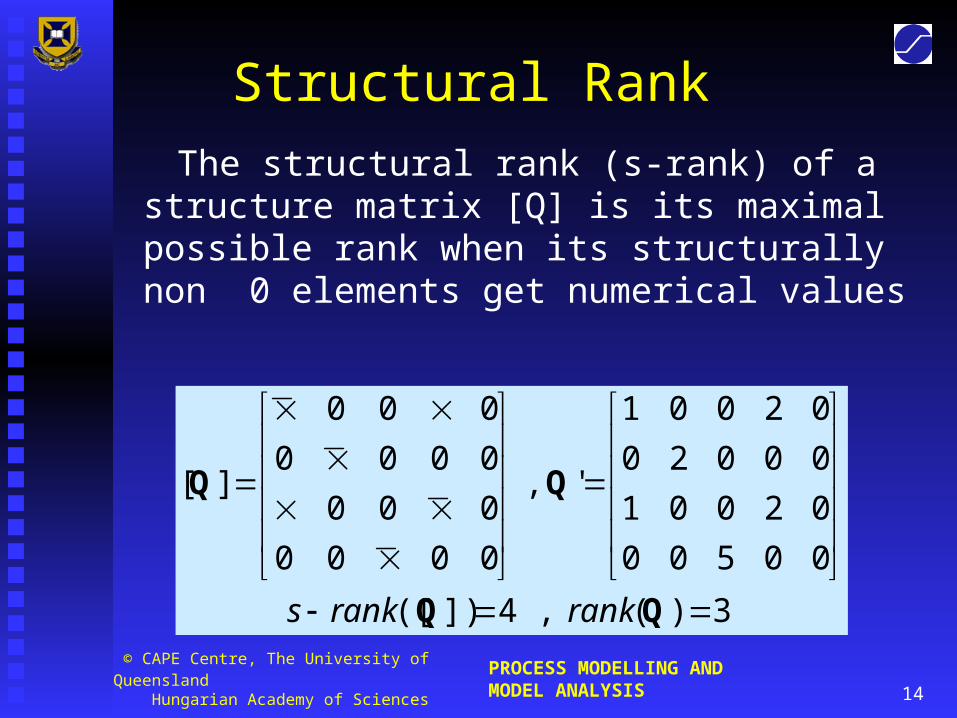
Structural Rank
The structural rank (s-rank) of a structure matrix [Q] is its maximal possible rank when its structurally non 0 elements get numerical values
3)( , 4])([
00500
02001
00020
02001
' ,
0000
000
0000
000
][
rankranks

15
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Structural Controllability
A system is structurally controllable if the structural rank (s-rank) of the block structure matrix [A,B] is equal to the number of state variables n
))(( ])([
... )( , ][ ][ ][ 1
BA,UBA,
BAABBBA,UBABA,
rankranks
n
16
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
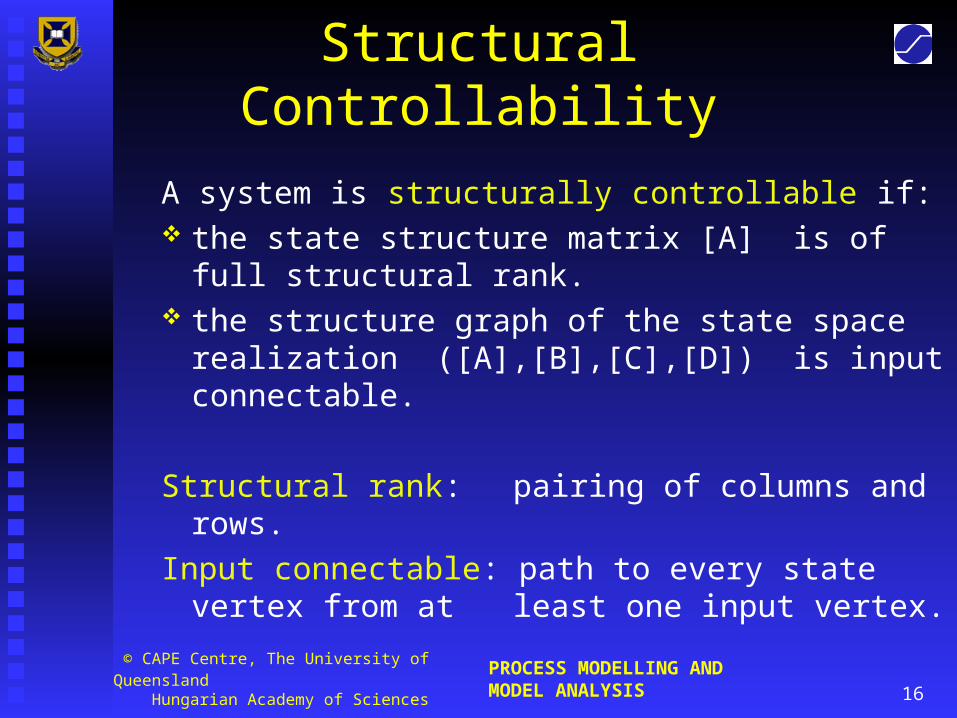
Structural Controllability
A system is structurally controllable if: the state structure matrix [A] is of full structural
rank. the structure graph of the state space realization
([A],[B],[C],[D]) is input connectable.
Structural rank: pairing of columns and rows.
Input connectable: path to every state vertex from at least one input vertex.

17
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Example: Heat exchanger modelled by 3 connected lumped volumes
y1
u2
x1 x2 x3
x4 x5 x6
u1
y2
[A] is of full structural rank (because of self loops)
Structure graph
18
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
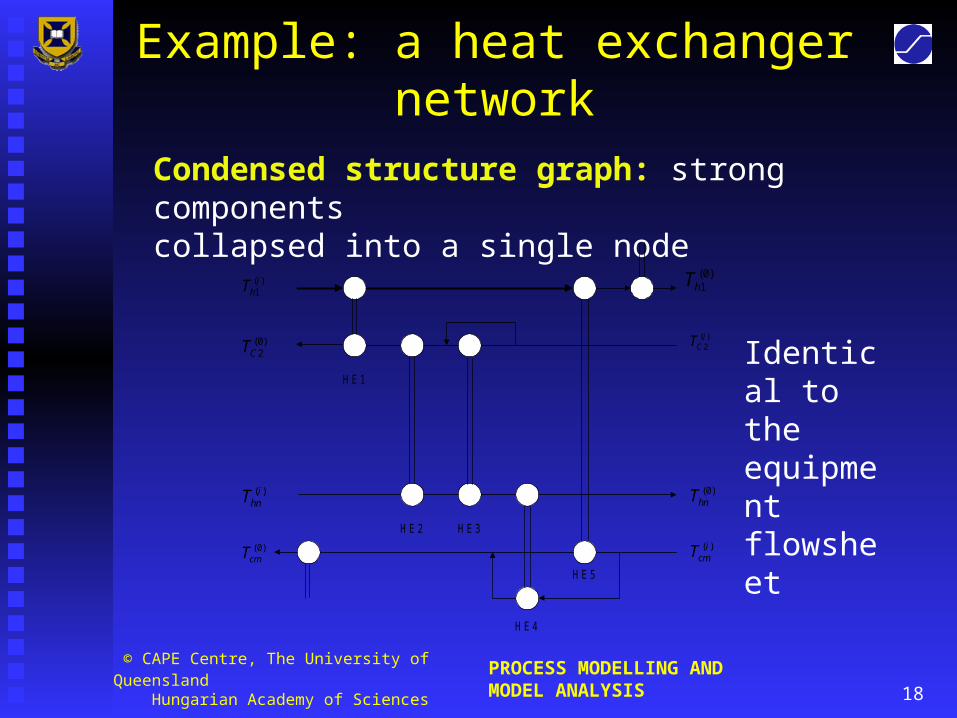
Example: a heat exchanger network
Identical to the equipment flowsheet
Condensed structure graph: strong components collapsed into a single node
)0(cmT
)(ihnT
)0(2CT
)(1i
hT)0(
1hT
)(2i
CT
)0(hnT
)(icmT
HE2
HE4
HE1
HE3
HE5

19
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Structural Observability
A system is structurally observable if the structural rank (s-rank) of the block structure matrix [C,A]T is equal to the number of state variables n
))(( )],([
...)( ,
][
][ ,
1
T
CA,VAC
CA
CA
C
CA,VA
CAC
rankranks T
n

20
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Structural Observability
A system is structurally observable if: the state structure matrix [A] is of full structural
rank. the structure graph of the state space realization
([A],[B],[C],[D]) is output connectable.
Structural rank: pairing of columns and rows.
Output connectable: path from every state vertex to
at least one output vertex.

21
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Structural Stability
Method of circle familiesconditions depending on the sign of non-touching circle families (computationally hard)
Method of conservation matrices
If the state matrix A is a conservation matrix then the system is structurally stable.
niaa
jiaa
jiijii ,...,1 , || :diagdominant
0 , 0 :patternsign ijii

22
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model Simplification and Reduction
LTI models with state space representation
States can be classified into: slow modes (“small” negative eigenvalues)
states essentially constant fast modes (“large” negative eigenvalues)
go to steady state rapidly medium modes
xyuxdt
dxCBA ,

23
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model Structure Simplification
Elementary simplification steps variable removal:
steady state assumption on a state variableremoves the vertex and all adjacent edgesand conserves the paths.
variable lumping:for a vertex pair with similar dynamics, it lumps the two vertices together, unites adjacent edgesand conserves the paths.

24
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Example: A heat exchanger 1. Variable removal
Steady-state variables: cold side temperatures
y1
u2
x1 x2 x3u1
y2

25
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Example: A heat exchanger 1. Variable lumping
Lumped variables: cold side temperatures hot side temperatures
y1
u2
XH
XC
u1
y2

26
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Equivalent State Space Models
Two state space models are equivalent if they give rise to the same input-output model.
Equivalence transformation of state space models of LTI systems are:
11
1
, ,
exists ,
TTTT
T
T T
CCBBAA
xx
nn
27
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model Reduction
Balanced state-space realizations: takes original A, B and C returns new “balanced” AA, BB and CCnew LTI has equal controllability and
observability Grammians returns the Grammian vector G
contains the contribution of the states to the controllability and observability
),,(],,,,[ CBAbalrealTGCCBBAA Matlab 4.2

28
© CAPE Centre, The University of Queensland Hungarian Academy of Sciences
PROCESS MODELLING AND MODEL ANALYSIS
Model Reduction
Use Grammian information for reduction• eliminate states where g(i)<g(1)/10
Model reduction of states x(ie1),…, x(ie1) done using (Matlab 4.2):
ELIM)DD,CC,BB,modred(AA,],,,[
];...;;[ 21
DRCRBRAR
iiiELIM ejee