PROBLEMS ON MECHANICS Jaan Kalda ranslated…kalda/ipho/meh_ENG.pdf · PROBLEMS ON MECHANICS Jaan...
20
This booklet is a sequel to a similar col- lection of problems on kinematics. Sim- ilarly to that collection the aim here is to present the most important ideas us- ing which one can solve most (> 95%) of olympiad problems on mechanics. Usu- ally a problem is stated first, and is fol- lowed by some relevant ideas and sug- gestions (letter ‘K’ in front of the number of an idea refers to the correspondingly numbered idea in the kinematics book- let). The answers to the problems are lis- ted at the end of the booklet. They are pre- ceded by quite detailed hints (no full solu- tions), but think carefully before reading the hints as a last resort! The guiding principle of this booklet argues that almost all olympiad problems are “variations” on a specific set of top- ics — the solutions follow from corres- ponding solution ideas. Usually it is not very hard to recognize the right idea for a given problem, having studied enough solution ideas. Discovering all the ne- cessary ideas during the actual solving would certainly show much more creativ- ity and offer a greater joy, but the skill of conceiving ideas is unfortunately difficult (or even impracticable) to learn or teach. Moreover, it may take a long time to reach a new idea, and those relying on trying it during an olympiad would be in disad- vantage in comparison to those who have mastered the ideas. In science as a whole, solution ideas play a similar role as in olympiads: most scientific papers apply and combine known ideas for solving new (or worse, old) problems, at best developing and generalising the ideas. Genuinely new good ideas occur extremely rarely and many of them are later known as master- pieces of science. However, as the whole repertoire of scientific ideas encompasses immensely more than mere mechanics, it is not so easy to remember and utilise them in right places. The respective skill is highly valued; an especial achievement would be employing a well-known idea in an unconventional (unexpected, novel) situation. In addition to ideas, the booklet also presents “facts” and “methods”. The dis- tinction is largely arbitrary, some facts could have been called methods and vice versa. In principle, an “idea” should have wider and/or more creative applications than a “fact”; a “method” is a universal and conventionalized “idea”. Several sources have been used for the problems: Estonian olympiads’ regional and national rounds, journal “Kvant”, Russian and Soviet Union’s olympi- ads; some problems have been modified (either easier or tougher), some are “folk- lore” (origins unknown). For problems on statics the solution is usually standard: we have to write down the condition of force balance for the x-, y- and (if necessary) z-components; often the condition of torque balance must be added. Usually the main ingenuity lies in IDEA 1: for instance, the reaction force between two bodies or the tensile force in a string (or a rod). To zero as many forces as pos- sible it is worthwhile to note that a) the axes may not be perpendicular; b) if the system consists of several bodies, then a different set of axes may be chosen for each body. IDEA 2: For example, if we choose the pivot to be at the contact point of two bodies, then the moment arms of the friction force between the bodies and of their reaction force are both zero. IDEA 3: x y An equation for the torques can be writ- ten about any pivot point (“axis” of rota- tion). In principle, we could write several equations for several pivots at the same time, but together with the equations for the forces the maximum number of linearly independent equations equals the number of degrees of freedom of the body (three in the two-dimensional case, as the body can rotate in a plane and shift along the x- and y-axis). Accordingly, all is fine if we write one forces equation and two torques equations (or just three torques equations — as long as the pivots do not lie on a straight line); on the other hand, if we wrote two equations of both types, then one of the four equations would always be a redundant consequence of the three others and needless to write down. So, an equation for the force balance may be replaced by an equation for the torque balance about an additional pivot. Such a substitution may turn out to be useful if the unwanted (uninteresting) forces are unparallel, because a choice of a projection axis can zero only one force in the balance of forces, while a choice of a pivot for the torques can zero two forces at once. PROB 1. An end of a light wire rod is bent into a hoop of radius r. The straight part of the rod has length l ; a ball of mass M is attached to the other end of the rod. The pendulum thus formed is hung by the hoop onto a revolving shaft. The coef- ficient of friction between the shaft and the hoop is µ. Find the equilibrium angle between the rod and the vertical. r l M ω μ Here we mainly need idea 2 with some simplification offered by FACT 1: α tan α = µ PROB 2. On an incline with slope angle α there lies a cylinder with mass M, its axis being horizontal. A small block with mass m is placed inside it. The coefficient of fric- tion between the block and the cylinder is µ; the incline is nonslippery. What is the maximum slope angle α for the cylinder to stay at rest? The block is much smaller than the radius of the cylinder. α m M Here we can again use fact 1 and idea 2 if we add
Transcript of PROBLEMS ON MECHANICS Jaan Kalda ranslated…kalda/ipho/meh_ENG.pdf · PROBLEMS ON MECHANICS Jaan...
PROBLEMS ON MECHANICSJaan KaldaTranslated: S. Ainsaar, T. Pungas, S. Zavjalov
INTRODUCTION Version:2nd August 2014
This booklet is a sequel to a similar col-lection of problems on kinematics. Sim-ilarly to that collection the aim here isto present the most important ideas us-ing which one can solve most (> 95%) ofolympiad problems on mechanics. Usu-ally a problem is stated first, and is fol-lowed by some relevant ideas and sug-gestions (letter ‘K’ in front of the numberof an idea refers to the correspondinglynumbered idea in the kinematics book-let). The answers to the problems are lis-ted at the end of the booklet. They are pre-ceded by quite detailed hints (no full solu-tions), but think carefully before readingthe hints as a last resort!
The guiding principle of this bookletargues that almost all olympiad problemsare “variations” on a specific set of top-ics — the solutions follow from corres-ponding solution ideas. Usually it is notvery hard to recognize the right idea fora given problem, having studied enoughsolution ideas. Discovering all the ne-cessary ideas during the actual solvingwould certainly show much more creativ-ity and offer a greater joy, but the skill ofconceiving ideas is unfortunately difficult(or even impracticable) to learn or teach.Moreover, it may take a long time to reacha new idea, and those relying on trying itduring an olympiad would be in disad-vantage in comparison to those who havemastered the ideas.
In science as a whole, solution ideasplay a similar role as in olympiads:most scientific papers apply and combineknown ideas for solving new (or worse,old) problems, at best developing andgeneralising the ideas. Genuinely newgood ideas occur extremely rarely andmany of them are later known as master-
pieces of science. However, as the wholerepertoire of scientific ideas encompassesimmensely more than mere mechanics, itis not so easy to remember and utilisethem in right places. The respective skillis highly valued; an especial achievementwould be employing a well-known ideain an unconventional (unexpected, novel)situation.
In addition to ideas, the booklet alsopresents “facts” and “methods”. The dis-tinction is largely arbitrary, some factscould have been called methods and viceversa. In principle, an “idea” should havewider and/or more creative applicationsthan a “fact”; a “method” is a universaland conventionalized “idea”.
Several sources have been used for theproblems: Estonian olympiads’ regionaland national rounds, journal “Kvant”,Russian and Soviet Union’s olympi-ads; some problems have been modified(either easier or tougher), some are “folk-lore” (origins unknown).
STATICS
For problems on statics the solution isusually standard: we have to write downthe condition of force balance for the x-,y- and (if necessary) z-components; oftenthe condition of torque balance must beadded. Usually the main ingenuity lies in
IDEA 1: choose optimal axes to zero asmany projections of forces as possible. Itis especially good to zero the projections ofthe forces we do not know and are not in-terested in,
for instance, the reaction force betweentwo bodies or the tensile force in a string(or a rod). To zero as many forces as pos-sible it is worthwhile to note that a) theaxes may not be perpendicular; b) if thesystem consists of several bodies, then a
different set of axes may be chosen foreach body.
IDEA 2: for the torques equation it is wiseto choose such a pivot point that zeroes asmany moment arms as possible. Again it isespecially bene�cial to zero the torques of�uninteresting� forces.
For example, if we choose the pivot tobe at the contact point of two bodies,then the moment arms of the friction forcebetween the bodies and of their reactionforce are both zero.
IDEA 3: in case of a two-dimensional sys-tem, we can write two equations per bodyfor the forces (x- and y-components) andone equation (per body) for the torques.
An equation for the torques can be writ-ten about any pivot point (“axis” of rota-tion). In principle, we could write severalequations for several pivots at the sametime, but together with the equations forthe forces the maximum number of linearlyindependent equations equals the number ofdegrees of freedom of the body (three in thetwo-dimensional case, as the body canrotate in a plane and shift along the x-and y-axis). Accordingly, all is fine if wewrite one forces equation and two torquesequations (or just three torques equations— as long as the pivots do not lie on astraight line); on the other hand, if wewrote two equations of both types, thenone of the four equations would alwaysbe a redundant consequence of the threeothers and needless to write down.
So, an equation for the force balancemay be replaced by an equation for thetorque balance about an additional pivot.Such a substitution may turn out to beuseful if the unwanted (uninteresting)forces are unparallel, because a choice ofa projection axis can zero only one forcein the balance of forces, while a choice of
a pivot for the torques can zero two forcesat once.
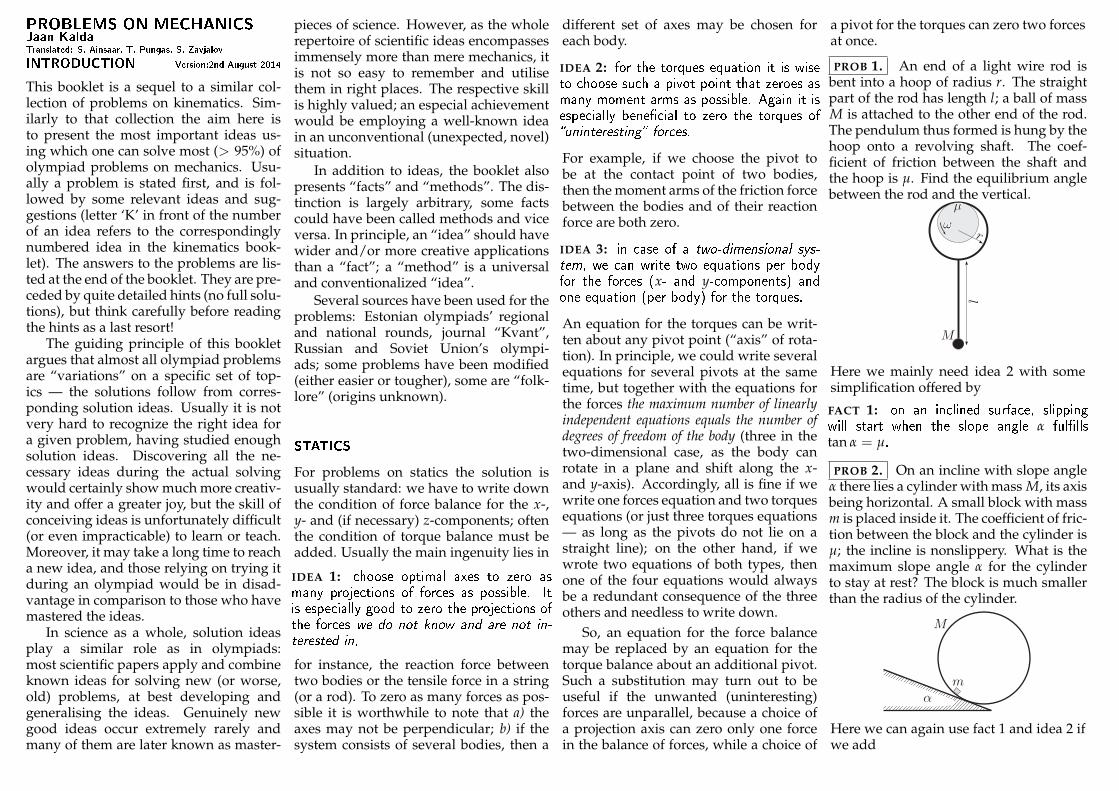
PROB 1. An end of a light wire rod isbent into a hoop of radius r. The straightpart of the rod has length l; a ball of massM is attached to the other end of the rod.The pendulum thus formed is hung by thehoop onto a revolving shaft. The coef-ficient of friction between the shaft andthe hoop is µ. Find the equilibrium anglebetween the rod and the vertical.
r
l
M
ω
µ
Here we mainly need idea 2 with somesimplification offered by
FACT 1: on an inclined surface, slippingwill start when the slope angle α ful�llstan α = µ.
PROB 2. On an incline with slope angleα there lies a cylinder with mass M, its axisbeing horizontal. A small block with massm is placed inside it. The coefficient of fric-tion between the block and the cylinder isµ; the incline is nonslippery. What is themaximum slope angle α for the cylinderto stay at rest? The block is much smallerthan the radius of the cylinder.
α
m
M
Here we can again use fact 1 and idea 2 ifwe add
IDEA 4: sometimes it is useful to considera system of two (or more) bodies as onewhole and write the equations for the forcesand/or the torques for the whole system.
Further, the net force (or torque) is thesum of forces (torques) acting on the con-stituents (the effort is eased as the internalforces are needless — they cancel eachother out). In our case, it is useful to as-semble such a whole system from the cyl-inder and the block.
PROB 3. Three identical rods are connec-ted by hinges to each other, the outmostones are hinged to a ceiling at points Aand B. The distance between these pointsis twice the length of a rod. A weight ofmass m is hanged onto hinge C. At leasthow strong a force onto hinge D is neces-sary to keep the system stationary with therod CD horizontal?
B
m
A
C DF
Again we can use idea 2. The work is alsoaided by
FACT 2: if forces are applied only to twopoints of a rod and the �xture of the rod isnot rigid (the rod rests freely on its supportsor is attached to a string or a hinge), thenthe tension force in the rod is directed alongthe rod.
Indeed, the net external force F ontoeither point of application of the forcesmust point along the rod, as its torquewith respect to the other point of applic-ation must be zero. In addition to the ex-ternal forces, the point is acted on by ten-sion force T that must compensate the restof the forces, so F = −T.
Some ideas are very universal, espe-cially the mathematical ones.
IDEA K5: some extrema are easier to �ndwithout using derivatives,
for example, the shortest path from apoint to a plane is perpendicular to it.
PROB 4. What is the minimum forceneeded to dislodge a block of mass m rest-ing on an inclined plane of slope angle α,if the coefficient of friction is µ? Investig-ate the cases when a) α = 0; b) 0 < α <arctan µ.
α
Fm
IDEA 5: force balance can sometimes beresolved vectorially without projecting any-thing onto axes.
Fact 1, or rather its following generalisa-tion, turns out to be of use:
FACT 3: if a body is on the verge of slip-ping (or already slipping), then the sum ofthe friction force and the reaction force isangled by arctan µ from the surface normal.
This fact is also beneficial in the next prob-lem.
PROB 5. A block rests on an inclined sur-face with slope angle α. The surface moveswith a horizontal acceleration a which liesin the same vertical plane as a normal vec-tor to the surface. Determine the values ofthe coefficient of friction µ that allow theblock to remain still.
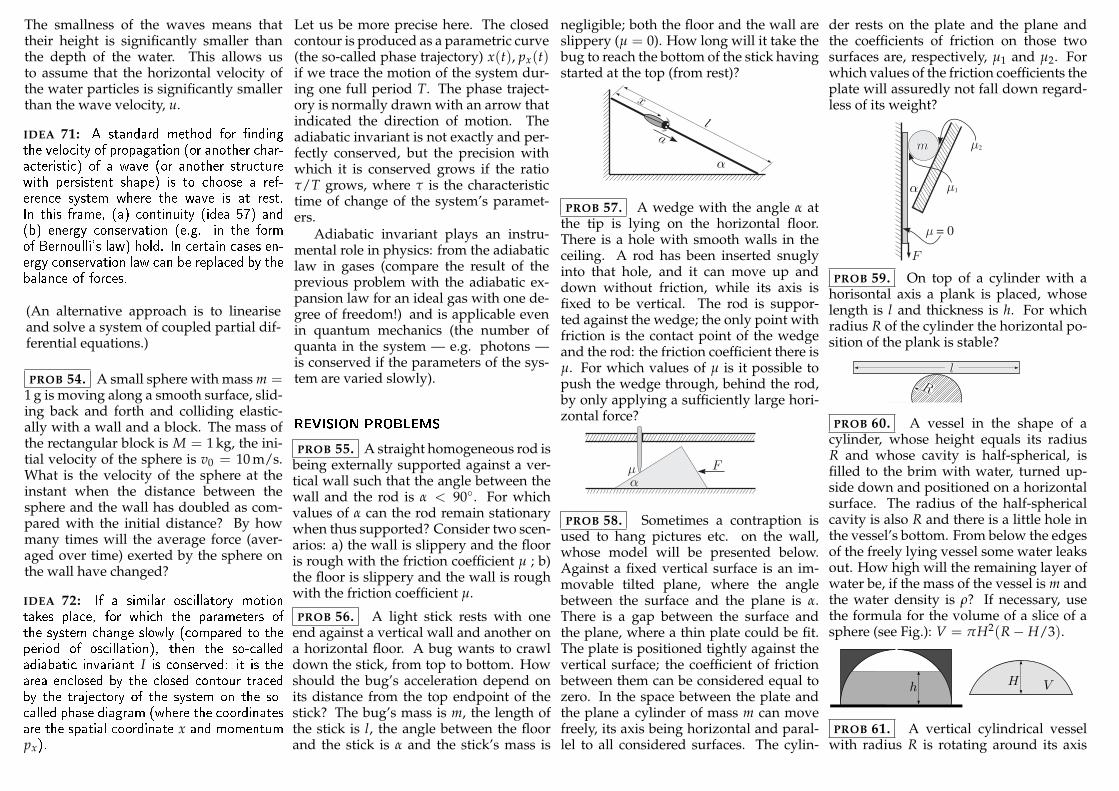
α
a
µ
Here we are helped by the very universal
IDEA 6: many problems become very easyin a non-inertial translationally moving ref-erence frame.
To clarify: in a translationally moving ref-erence frame we can re-establish New-ton’s laws by imagining that every bodywith mass m is additionally acted on byan inertial force −ma where a is the ac-celeration of the frame of reference. Notethat that the fictitious force is totally ana-logous to the gravitational force and (asan aside) their equivalence is the corner-stone of the theory of general relativity(more specifically, it assumes the inertialand gravitational forces to be indistin-guishable in any local measurement).
IDEA 7: The net of the inertial and gravit-ational forces is usable as an e�ective grav-itational force.
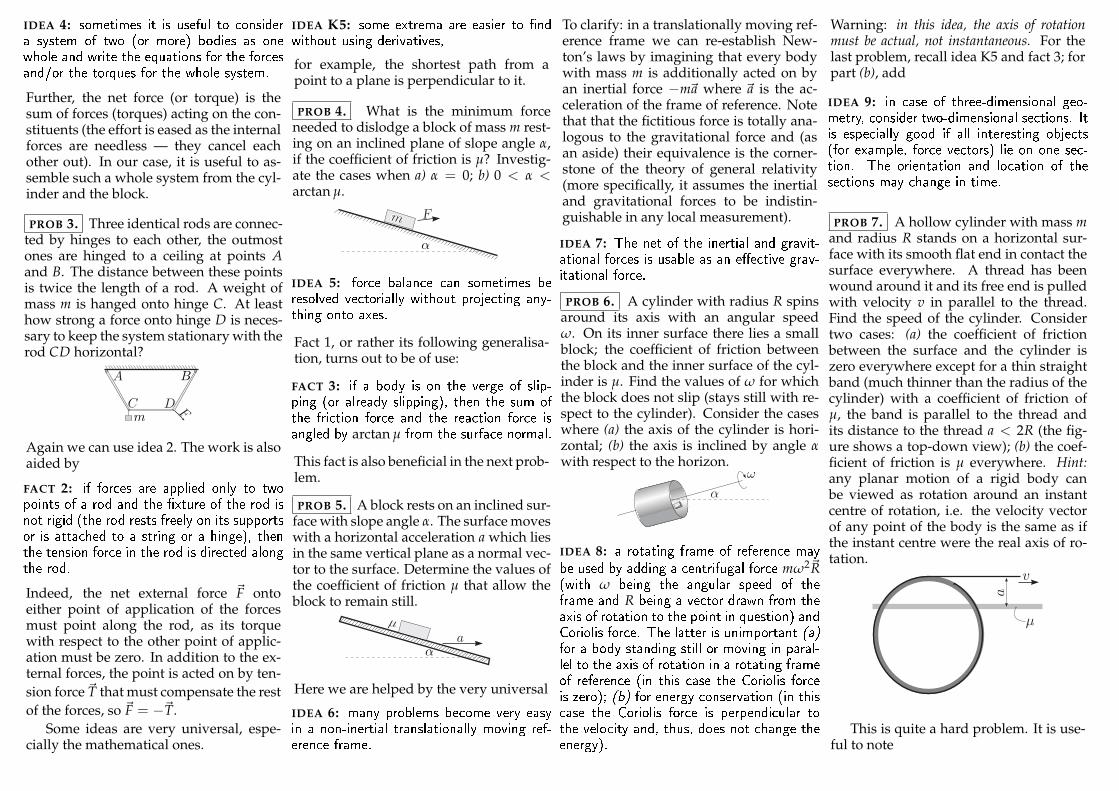
PROB 6. A cylinder with radius R spinsaround its axis with an angular speedω. On its inner surface there lies a smallblock; the coefficient of friction betweenthe block and the inner surface of the cyl-inder is µ. Find the values of ω for whichthe block does not slip (stays still with re-spect to the cylinder). Consider the caseswhere (a) the axis of the cylinder is hori-zontal; (b) the axis is inclined by angle αwith respect to the horizon.
ω
α
IDEA 8: a rotating frame of reference maybe used by adding a centrifugal force mω2R(with ω being the angular speed of theframe and R being a vector drawn from theaxis of rotation to the point in question) andCoriolis force. The latter is unimportant (a)for a body standing still or moving in paral-lel to the axis of rotation in a rotating frameof reference (in this case the Coriolis forceis zero); (b) for energy conservation (in thiscase the Coriolis force is perpendicular tothe velocity and, thus, does not change theenergy).
Warning: in this idea, the axis of rotationmust be actual, not instantaneous. For thelast problem, recall idea K5 and fact 3; forpart (b), add
IDEA 9: in case of three-dimensional geo-metry, consider two-dimensional sections. Itis especially good if all interesting objects(for example, force vectors) lie on one sec-tion. The orientation and location of thesections may change in time.
PROB 7. A hollow cylinder with mass mand radius R stands on a horizontal sur-face with its smooth flat end in contact thesurface everywhere. A thread has beenwound around it and its free end is pulledwith velocity v in parallel to the thread.Find the speed of the cylinder. Considertwo cases: (a) the coefficient of frictionbetween the surface and the cylinder iszero everywhere except for a thin straightband (much thinner than the radius of thecylinder) with a coefficient of friction ofµ, the band is parallel to the thread andits distance to the thread a < 2R (the fig-ure shows a top-down view); (b) the coef-ficient of friction is µ everywhere. Hint:any planar motion of a rigid body canbe viewed as rotation around an instantcentre of rotation, i.e. the velocity vectorof any point of the body is the same as ifthe instant centre were the real axis of ro-tation.
v
a
µ
This is quite a hard problem. It is use-ful to note
IDEA 10: if a body has to move with aconstant velocity, then the problem is aboutstatics.
Also remember ideas 1 and 2. The lattercan be replaced with its consequence,
FACT 4: if a body in equilibrium is acted onby three forces at three separate points, thentheir lines of action intersect at one point.If there are only two points of action, thenthe corresponding lines coincide.
Another useful fact is
FACT 5: the friction force acting on a givenpoint is always antiparallel to the velocity ofthe point in the frame of reference of thebody causing the friction.
From time to time some mathematicaltricks are also of use; here it is the prop-erty of inscribed angles (Thales’ theorem),
FACT 6: a right angle is subtended by asemicircle (in general: an inscribed angle inradians equals half of the ratio between itsarc-length and radius).
The property of inscribed angles isalso useful in the next problem, if we add(somewhat trivial)
IDEA 11: in stable equilibrium the potentialenergy of a body is minimum.
PROB 8. A light wire is bent into a rightangle and a heavy ball is attached to thebend. The wire is placed onto supportswith height difference h and horizontaldistance a. Find the position of the wirein its equilibrium. Express the position asthe angle between the bisector of the rightangle and the vertical. Neglect any fric-tion between the wire and the supports;the supports have little grooves keepingall motion in the plane of the wire and thefigure.
α
a
h
PROB 9. A rod with length l is hingedto a ceiling with height h < l. Under-neath, a board is being dragged on thefloor. The rod is meant to block the move-ment the board in one direction while al-lowing it move in the opposite direction.What condition should be fulfilled for itto do its job? The coefficient of friction isµ1 between the board and the rod, and µ2between the board and the floor.
α
µ1µ2
Let’s remember fact 3: if the relativesliding between two bodies has a knowndirection, then the direction of the sum ofthe friction and reaction force vectors isalways uniquely determined by the coef-ficient of friction. If a force makes one ofthe bodies move in such a way that thereaction force grows, then they jam: thelarger the forces we try to drag the bod-ies with, the larger friction and reactionforces restrain them.
IDEA 12: Friction can block movement. Insuch a case, all forces become negligible ex-cept for the friction force, reaction forceand the externally applied force that triesto make the system move, because gravit-ational (and such) forces are �xed, but thesaid forces become the larger the harder wepush or pull.
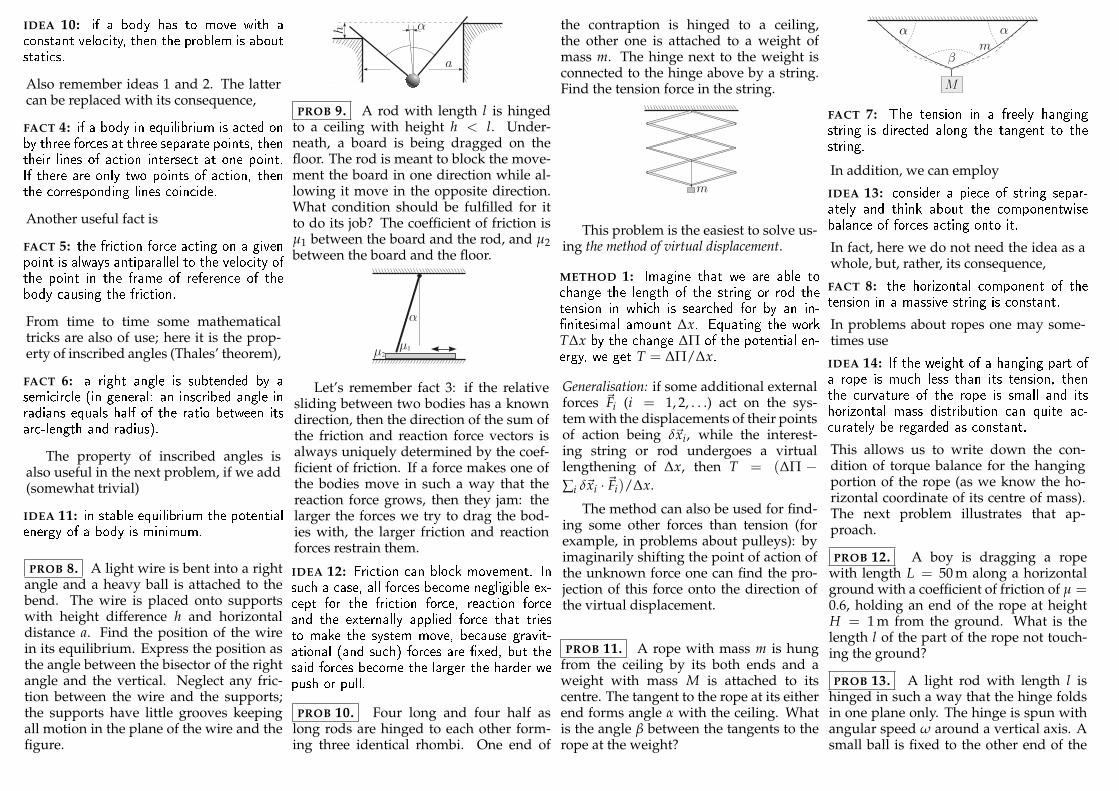
PROB 10. Four long and four half aslong rods are hinged to each other form-ing three identical rhombi. One end of
the contraption is hinged to a ceiling,the other one is attached to a weight ofmass m. The hinge next to the weight isconnected to the hinge above by a string.Find the tension force in the string.
m
This problem is the easiest to solve us-ing the method of virtual displacement.
METHOD 1: Imagine that we are able tochange the length of the string or rod thetension in which is searched for by an in-�nitesimal amount ∆x. Equating the workT∆x by the change ∆Π of the potential en-ergy, we get T = ∆Π/∆x.
Generalisation: if some additional externalforces Fi (i = 1, 2, . . .) act on the sys-tem with the displacements of their pointsof action being δxi, while the interest-ing string or rod undergoes a virtuallengthening of ∆x, then T = (∆Π −∑i δxi · Fi)/∆x.
The method can also be used for find-ing some other forces than tension (forexample, in problems about pulleys): byimaginarily shifting the point of action ofthe unknown force one can find the pro-jection of this force onto the direction ofthe virtual displacement.
PROB 11. A rope with mass m is hungfrom the ceiling by its both ends and aweight with mass M is attached to itscentre. The tangent to the rope at its eitherend forms angle α with the ceiling. Whatis the angle β between the tangents to therope at the weight?
α α
βm
M
FACT 7: The tension in a freely hangingstring is directed along the tangent to thestring.
In addition, we can employ
IDEA 13: consider a piece of string separ-ately and think about the componentwisebalance of forces acting onto it.
In fact, here we do not need the idea as awhole, but, rather, its consequence,
FACT 8: the horizontal component of thetension in a massive string is constant.
In problems about ropes one may some-times use
IDEA 14: If the weight of a hanging part ofa rope is much less than its tension, thenthe curvature of the rope is small and itshorizontal mass distribution can quite ac-curately be regarded as constant.
This allows us to write down the con-dition of torque balance for the hangingportion of the rope (as we know the ho-rizontal coordinate of its centre of mass).The next problem illustrates that ap-proach.
PROB 12. A boy is dragging a ropewith length L = 50 m along a horizontalground with a coefficient of friction of µ =0.6, holding an end of the rope at heightH = 1 m from the ground. What is thelength l of the part of the rope not touch-ing the ground?
PROB 13. A light rod with length l ishinged in such a way that the hinge foldsin one plane only. The hinge is spun withangular speed ω around a vertical axis. Asmall ball is fixed to the other end of the
rod. (a) Find the angular speeds for whichthe vertical orientation is stable. (b) Theball is now attached to another hinge and,in turn, to another identical rod; the upperhinge is spun in the same way. What isnow the condition of stability for the ver-tical orientation?
ω ω
a) b)
l
ll
For answering about the stability ofan equilibrium, usually the following factworks best.
IDEA 15: Presume that the system devi-ates a little from the equilibrium, either bya small displacement ∆x or by a small angle∆φ, and �nd the direction of the appear-ing force or torque � whether it is to-wards the equilibrium or away from it. NB!compute approximately: in almost all cases,an approximation linear in the deviation isenough.
Incidentally use all formulae of approx-imate calculation known from mathemat-ics (sin φ ≈ φ and others);
IDEA 16: f (x + ∆x) ≈ f (x) + f ′(x)∆x[+ f ′′(x)∆x2
2 ]; (x + ∆x)(y + ∆y) ≈ xy +x∆y + y∆x etc (consider them whereverinitial data suggest some parameter to besmall).
The case (b) is substantially more diffi-cult as the system has two degrees of free-dom (for example, the deviation angles∆φ1 and ∆φ2 of the rods). Although idea15 is generalisable for more than one de-grees of freedom, apparently it is easier tostart from idea 11.
IDEA 17: The equilibrium x = y = 0 ofa system having two degrees of freedom isstable if (and only if) the potential energy
Π(x, y), when viewed as a one-variable func-tion Π(x, kx), has a minimum for all realconstants k.
PROB 14. If a beam with square cross-section and very low density is placed inwater, it will turn one pair of its long op-posite faces horizontal. This orientation,however, becomes unstable as we increaseits density. Find the critical density whenthis transition occurs. The density of wa-ter is ρv = 1000 kg/m3.
IDEA 18: The torque acting on a bodyplaced into a liquid is equal to torque frombuoyancy, if we take the latter force to beacting on the centre of the mass of the dis-placed liquid.
Indeed, consider a body with density ofthe liquid and shape identical to the partof the given body that is immersed inthe liquid. Of course it must be in equi-librium when placed in water: whateverpoint we choose to measure torques from,the sum of moments from pressure forcesis always equal to the opposite value oftorque from gravity. When calculating themoments from buoyancy in this question,it is useful to keep in mind that we cangive negative mass to bits of some body:if two bits overlap that have the samedensity with different signs, they add upto zero density. The last suggestion can beformulated in a more general way:
IDEA 19: In order to achieve a more sym-metric con�guration or to make the situ-ation simpler in some other way, it is some-times useful to represent a region with zerovalue of some quantity as a superposition oftwo regions with opposite signs of the samequantity.
This quantity can be mass density (like inthis case), charge or current density, someforce field etc. Often this trick can be com-bined with
IDEA 20: Make the problem as symmetricas possible.
This goal can be reached by applyingidea 19, but also by using appropriatereference frames, dividing the process ofsolving into several phases (where somephases use symmetric geometry), etc.
PROB 15. A hemispherical container isplaced upside down on a smooth hori-zontal surface. Through a small holeat the bottom of the container, water isthen poured in. Exactly when the con-tainer gets full, water starts leaking frombetween the table and the edge of the con-tainer. Find the mass of the containerif water has density ρ and radius of thehemisphere is R.
M
R
IDEA 21: If water starts �owing out fromunder an upside down container, normalforce must have vanished between the tableand the edge of the container. Thereforeforce acting on the system container+liquidfrom the table is equal solely to force fromhydrostatic pressure.
The latter is given by pS, where p is pres-sure of the liquid near the tabletop and Sis area of the container’s open side.
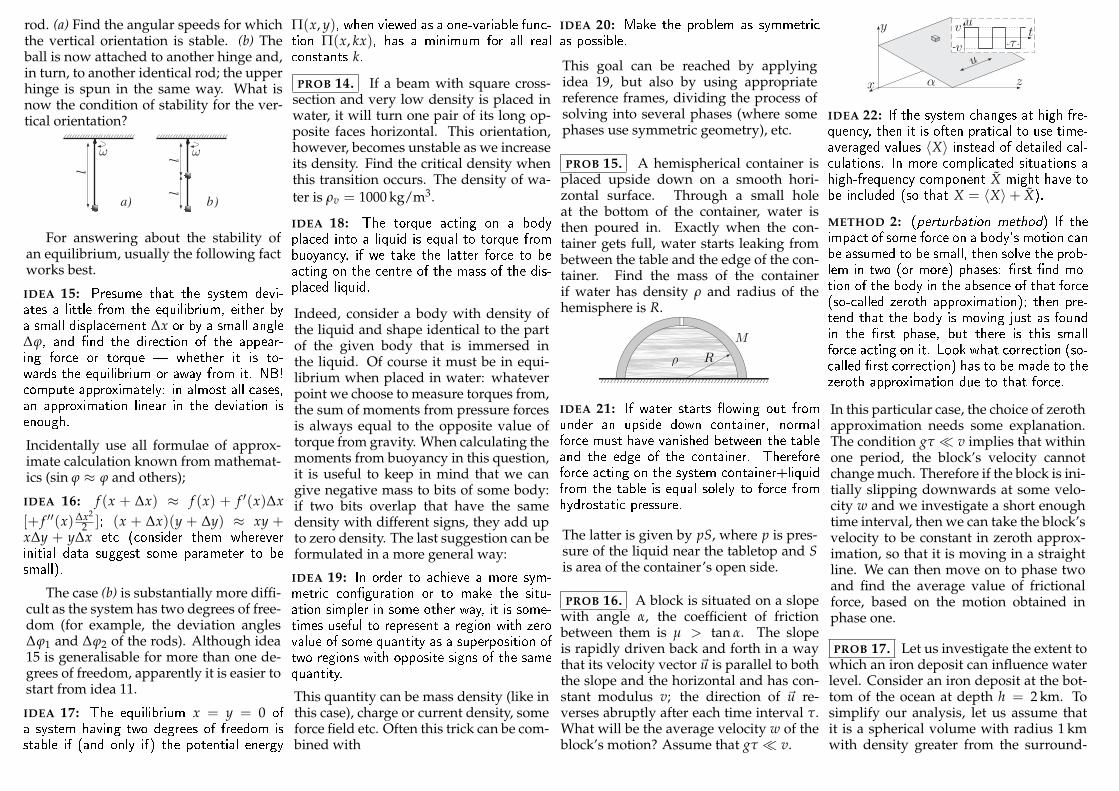
PROB 16. A block is situated on a slopewith angle α, the coefficient of frictionbetween them is µ > tan α. The slopeis rapidly driven back and forth in a waythat its velocity vector u is parallel to boththe slope and the horizontal and has con-stant modulus v; the direction of u re-verses abruptly after each time interval τ.What will be the average velocity w of theblock’s motion? Assume that gτ ≪ v.
x
y
z
utv
−v τ
u
α
IDEA 22: If the system changes at high fre-quency, then it is often pratical to use time-averaged values ⟨X⟩ instead of detailed cal-culations. In more complicated situations ahigh-frequency component X might have tobe included (so that X = ⟨X⟩+ X).
METHOD 2: (perturbation method) If theimpact of some force on a body's motion canbe assumed to be small, then solve the prob-lem in two (or more) phases: �rst �nd mo-tion of the body in the absence of that force(so-called zeroth approximation); then pre-tend that the body is moving just as foundin the �rst phase, but there is this smallforce acting on it. Look what correction (so-called �rst correction) has to be made to thezeroth approximation due to that force.
In this particular case, the choice of zerothapproximation needs some explanation.The condition gτ ≪ v implies that withinone period, the block’s velocity cannotchange much. Therefore if the block is ini-tially slipping downwards at some velo-city w and we investigate a short enoughtime interval, then we can take the block’svelocity to be constant in zeroth approx-imation, so that it is moving in a straightline. We can then move on to phase twoand find the average value of frictionalforce, based on the motion obtained inphase one.
PROB 17. Let us investigate the extent towhich an iron deposit can influence waterlevel. Consider an iron deposit at the bot-tom of the ocean at depth h = 2 km. Tosimplify our analysis, let us assume thatit is a spherical volume with radius 1 kmwith density greater from the surround-
ing rock by ∆ρ = 1000 kg/m3. Presumethat this sphere touches the bottom of theocean with its top, i.e. that its centre issituated at depth r + h. By how muchis the water level directly above the irondeposit different from the average waterlevel?
iron depositiron deposit
rrhh
IDEA 23: The surface of a liquid in equilib-rium takes an equipotential shape, i.e. ener-gies of its constituent particles are the sameat every point of the surface.
If this was not the case, the potential en-ergy of the liquid could be decreased byallowing some particles on the surface toflow along the surface to where their po-tential energy is smaller.
IDEA 24: Gravitational potentials can becalculated exactly in the same way as elec-trostatic potentials.
The principle of superposition still holdsand a sphere’s potential only has a dif-ferent factor: instead of Q/4πε0r in elec-trostatics the gravitational potential of asphere with respect to infinity is φ =−GM/r; the minus sign comes from thefact that masses with the same sign [“+”]attract.
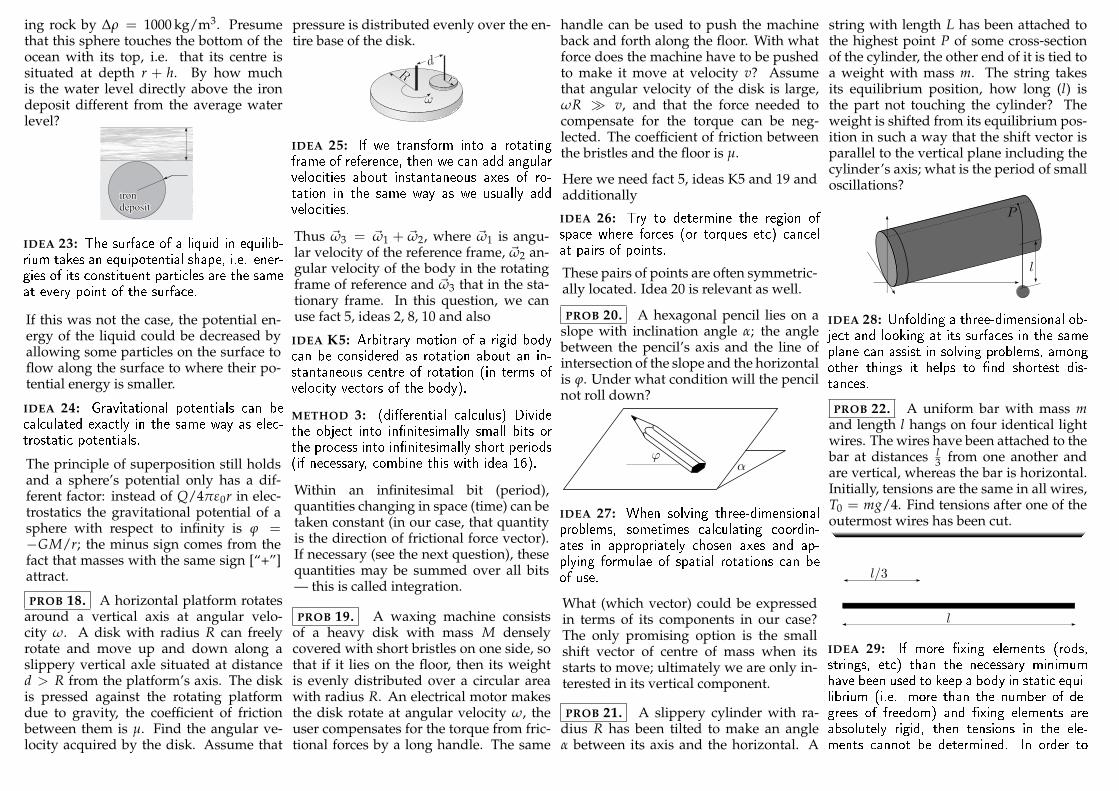
PROB 18. A horizontal platform rotatesaround a vertical axis at angular velo-city ω. A disk with radius R can freelyrotate and move up and down along aslippery vertical axle situated at distanced > R from the platform’s axis. The diskis pressed against the rotating platformdue to gravity, the coefficient of frictionbetween them is µ. Find the angular ve-locity acquired by the disk. Assume that
pressure is distributed evenly over the en-tire base of the disk.
dR
ω
r
IDEA 25: If we transform into a rotatingframe of reference, then we can add angularvelocities about instantaneous axes of ro-tation in the same way as we usually addvelocities.
Thus ω3 = ω1 + ω2, where ω1 is angu-lar velocity of the reference frame, ω2 an-gular velocity of the body in the rotatingframe of reference and ω3 that in the sta-tionary frame. In this question, we canuse fact 5, ideas 2, 8, 10 and also
IDEA K5: Arbitrary motion of a rigid bodycan be considered as rotation about an in-stantaneous centre of rotation (in terms ofvelocity vectors of the body).
METHOD 3: (di�erential calculus) Dividethe object into in�nitesimally small bits orthe process into in�nitesimally short periods(if necessary, combine this with idea 16).
Within an infinitesimal bit (period),quantities changing in space (time) can betaken constant (in our case, that quantityis the direction of frictional force vector).If necessary (see the next question), thesequantities may be summed over all bits— this is called integration.
PROB 19. A waxing machine consistsof a heavy disk with mass M denselycovered with short bristles on one side, sothat if it lies on the floor, then its weightis evenly distributed over a circular areawith radius R. An electrical motor makesthe disk rotate at angular velocity ω, theuser compensates for the torque from fric-tional forces by a long handle. The same
handle can be used to push the machineback and forth along the floor. With whatforce does the machine have to be pushedto make it move at velocity v? Assumethat angular velocity of the disk is large,ωR ≫ v, and that the force needed tocompensate for the torque can be neg-lected. The coefficient of friction betweenthe bristles and the floor is µ.
Here we need fact 5, ideas K5 and 19 andadditionally
IDEA 26: Try to determine the region ofspace where forces (or torques etc) cancelat pairs of points.
These pairs of points are often symmetric-ally located. Idea 20 is relevant as well.
PROB 20. A hexagonal pencil lies on aslope with inclination angle α; the anglebetween the pencil’s axis and the line ofintersection of the slope and the horizontalis φ. Under what condition will the pencilnot roll down?
α
ϕ
IDEA 27: When solving three-dimensionalproblems, sometimes calculating coordin-ates in appropriately chosen axes and ap-plying formulae of spatial rotations can beof use.
What (which vector) could be expressedin terms of its components in our case?The only promising option is the smallshift vector of centre of mass when itsstarts to move; ultimately we are only in-terested in its vertical component.
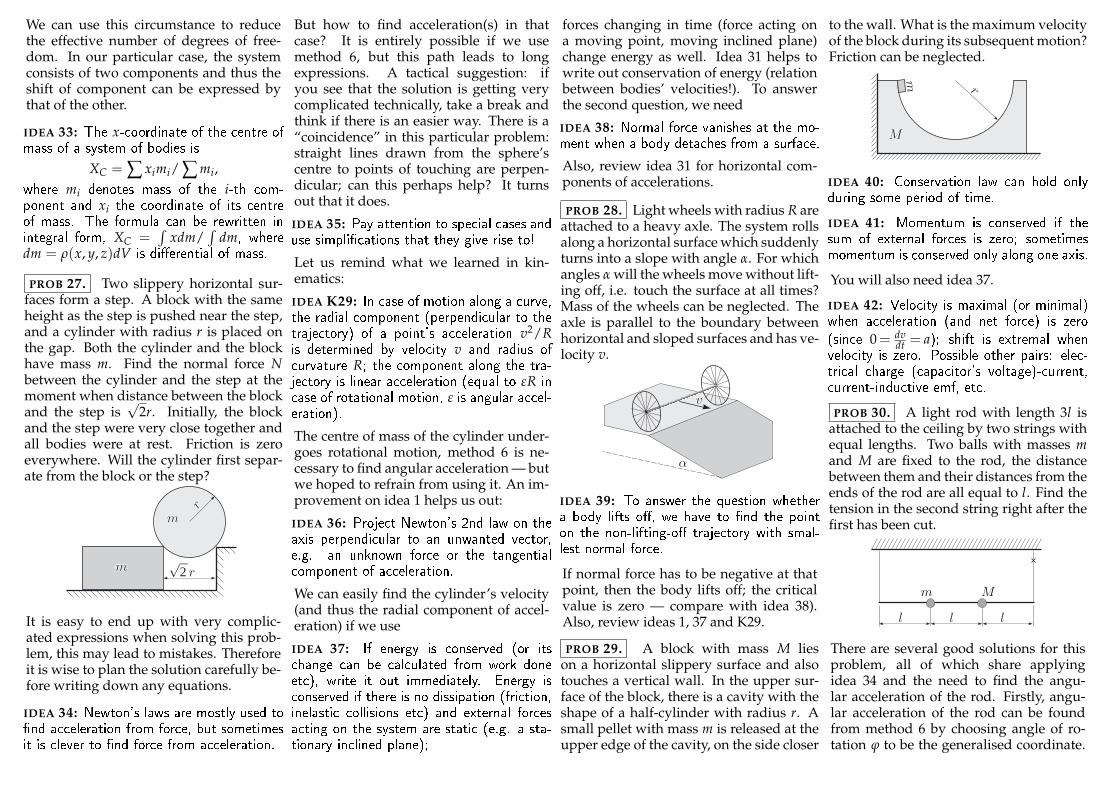
PROB 21. A slippery cylinder with ra-dius R has been tilted to make an angleα between its axis and the horizontal. A
string with length L has been attached tothe highest point P of some cross-sectionof the cylinder, the other end of it is tied toa weight with mass m. The string takesits equilibrium position, how long (l) isthe part not touching the cylinder? Theweight is shifted from its equilibrium pos-ition in such a way that the shift vector isparallel to the vertical plane including thecylinder’s axis; what is the period of smalloscillations?
®l
P
IDEA 28: Unfolding a three-dimensional ob-ject and looking at its surfaces in the sameplane can assist in solving problems, amongother things it helps to �nd shortest dis-tances.
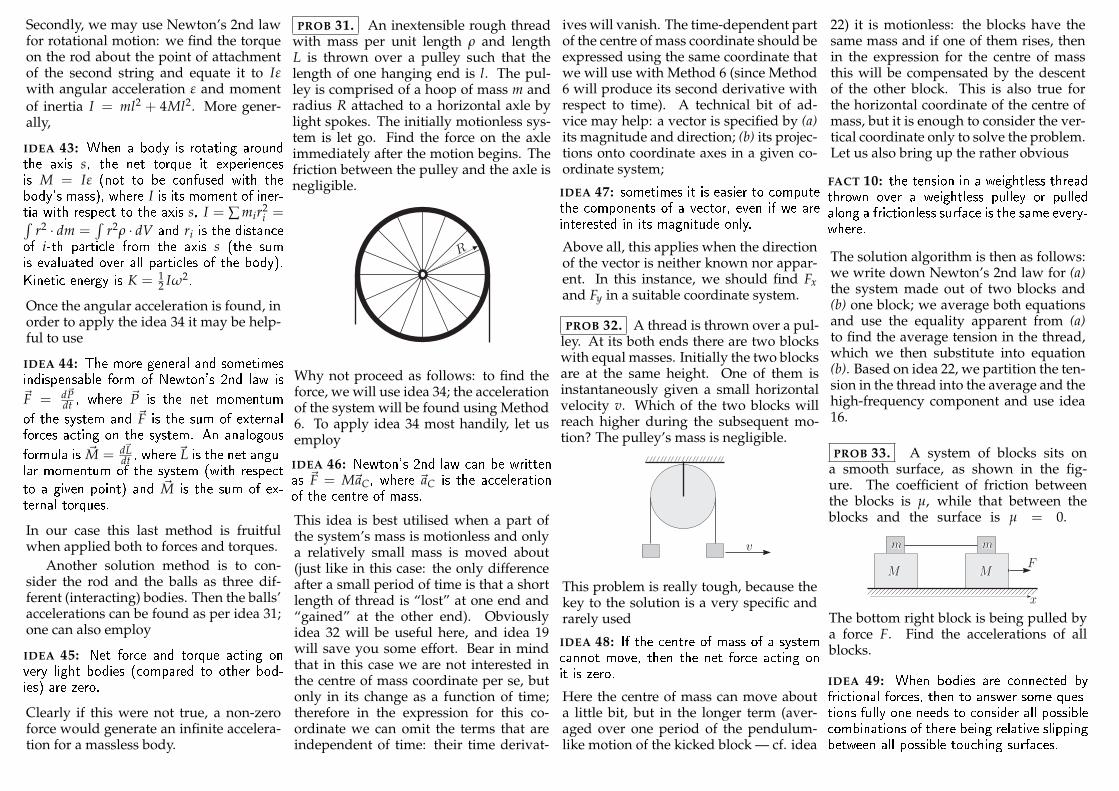
PROB 22. A uniform bar with mass mand length l hangs on four identical lightwires. The wires have been attached to thebar at distances l
3 from one another andare vertical, whereas the bar is horizontal.Initially, tensions are the same in all wires,T0 = mg/4. Find tensions after one of theoutermost wires has been cut.
l
l/3
IDEA 29: If more �xing elements (rods,strings, etc) than the necessary minimumhave been used to keep a body in static equi-librium (i.e. more than the number of de-grees of freedom) and �xing elements areabsolutely rigid, then tensions in the ele-ments cannot be determined. In order to
make it possible, the elements have to beconsidered elastic (able to deform).
Let us note that this statement is in ac-cordance with idea 3 that gives the num-ber of available equations (there can be nomore unknowns than equations). In thisparticular case, we are dealing with ef-fectively one-dimensional geometry withno horizontal forces, but the body couldrotate (in absence of the wires). Thuswe have two degrees of freedom, corres-ponding to vertical and rotational motion.Since the wires are identical, they musthave the same stiffness as well; the word“wire” hints at large stiffness, i.e. deform-ations (and the inclination angle of thebar) are small.
DYNAMICS
A large proportion of dynamics problemsconsist of finding the acceleration of somesystem or forces acting between somebodies. There are several possible ap-proaches for solving these questions, herewe consider three of them.
METHOD 4: For each body, we �nd all theforces acting on it, including normal forcesand frictional forces, and write out Newton'ssecond law in terms of components (i.e. byprojecting the equation on x, y, and possiblyz-axes).
We need the same number of equations aswe have unknowns; following idea 1 canhelp to reduce that number.
PROB 23. A block with mass M lies ona slippery horizontal surface. On top of itthere is another block with mass m whichin turn is attached to an identical blockby a string. The string has been pulledacross a pulley situated at the corner ofthe big block and the second small blockis hanging vertically. Initially, the system
is held at rest. Find the acceleration of thebig block immediately after the system isreleased. You may neglect friction, as wellas masses of the string and the pulley.
M
m
m
This question can be successfullysolved using method 4, but we need twomore ideas.
IDEA 30: If a body is initially at rest, thenits shift vector is parallel to the force actingon it (and its acceleration) right after thestart of its motion.
IDEA 31: If bodies are connected by a ropeor a rod or perhaps a pulley or one is sup-ported by the other, then there is an arith-metic relation between the bodies' shifts(and velocities, accelerations) that describesthe fact that length of the string (rod, etc.)is constant.
If bodies start at rest or if motion is along astraight line, then the same relation holdsbetween accelerations, since the relationfor shifts can be differentiated w.r.t. time.This relation is usually relatively simple,but in some problems it is easy to make amistake.
METHOD 5: Otherwise the same as method4, but motion is investigated in a non-inertial frame of reference (see idea 6) whereone of the bodies is at rest.
Method 5 is useful in many questions con-cerning wedges, where it can be difficultto write out the condition for an object tostay on the wedge in the laboratory frame.Applying idea 31 is also often easier inthe wedge’s frame of reference than in thelaboratory frame. Since the body defining
the reference frame is at rest, we can writeout the condition(s) of equilibrium for it.
FACT 9: If the frame of reference of an ac-celerating body is used (method 5), then inthe new frame the forces acting on this bodyadd up to zero.
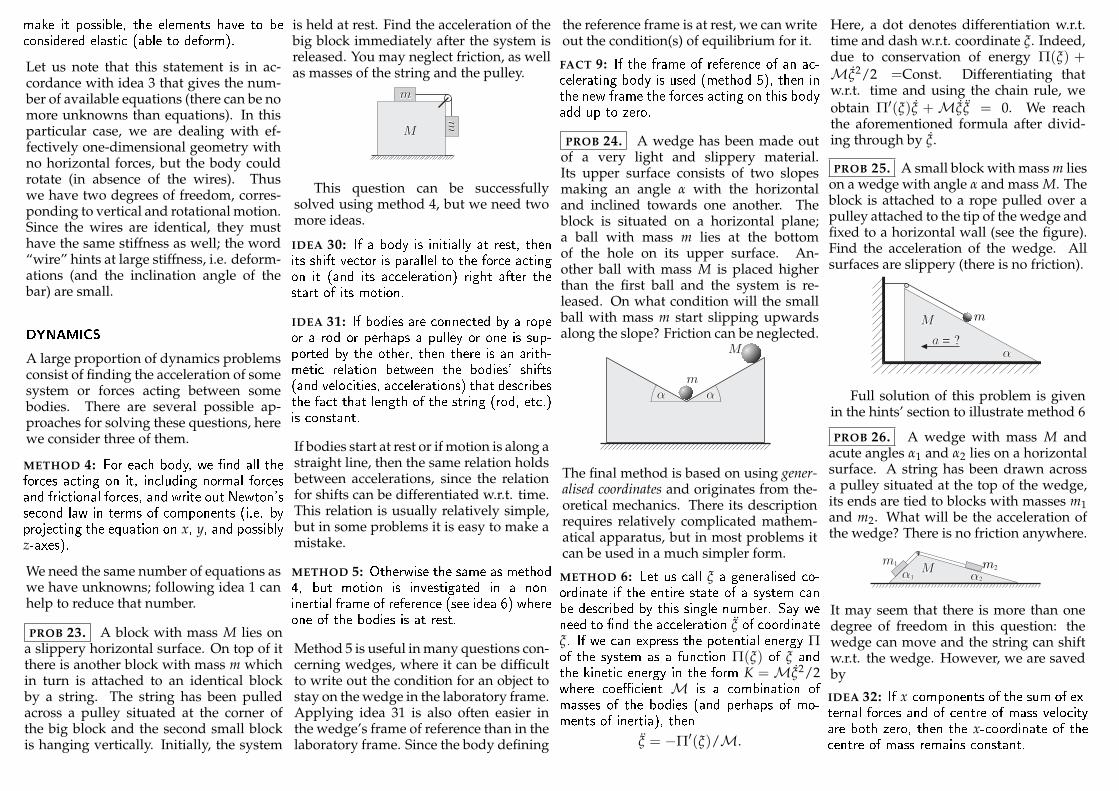
PROB 24. A wedge has been made outof a very light and slippery material.Its upper surface consists of two slopesmaking an angle α with the horizontaland inclined towards one another. Theblock is situated on a horizontal plane;a ball with mass m lies at the bottomof the hole on its upper surface. An-other ball with mass M is placed higherthan the first ball and the system is re-leased. On what condition will the smallball with mass m start slipping upwardsalong the slope? Friction can be neglected.
M
m
α α
The final method is based on using gener-alised coordinates and originates from the-oretical mechanics. There its descriptionrequires relatively complicated mathem-atical apparatus, but in most problems itcan be used in a much simpler form.
METHOD 6: Let us call ξ a generalised co-ordinate if the entire state of a system canbe described by this single number. Say weneed to �nd the acceleration ξ of coordinateξ. If we can express the potential energy Πof the system as a function Π(ξ) of ξ andthe kinetic energy in the form K = Mξ2/2where coe�cient M is a combination ofmasses of the bodies (and perhaps of mo-ments of inertia), then
ξ = −Π′(ξ)/M.
Here, a dot denotes differentiation w.r.t.time and dash w.r.t. coordinate ξ. Indeed,due to conservation of energy Π(ξ) +Mξ2/2 =Const. Differentiating thatw.r.t. time and using the chain rule, weobtain Π′(ξ)ξ + Mξ ξ = 0. We reachthe aforementioned formula after divid-ing through by ξ.
PROB 25. A small block with mass m lieson a wedge with angle α and mass M. Theblock is attached to a rope pulled over apulley attached to the tip of the wedge andfixed to a horizontal wall (see the figure).Find the acceleration of the wedge. Allsurfaces are slippery (there is no friction).
m
α
M
a = ?
Full solution of this problem is givenin the hints’ section to illustrate method 6
PROB 26. A wedge with mass M andacute angles α1 and α2 lies on a horizontalsurface. A string has been drawn acrossa pulley situated at the top of the wedge,its ends are tied to blocks with masses m1and m2. What will be the acceleration ofthe wedge? There is no friction anywhere.
m2m1
α1 α2
M
It may seem that there is more than onedegree of freedom in this question: thewedge can move and the string can shiftw.r.t. the wedge. However, we are savedby
IDEA 32: If x-components of the sum of ex-ternal forces and of centre of mass velocityare both zero, then the x-coordinate of thecentre of mass remains constant.
We can use this circumstance to reducethe effective number of degrees of free-dom. In our particular case, the systemconsists of two components and thus theshift of component can be expressed bythat of the other.
IDEA 33: The x-coordinate of the centre ofmass of a system of bodies is
XC = ∑ ximi/ ∑ mi,where mi denotes mass of the i-th com-ponent and xi the coordinate of its centreof mass. The formula can be rewritten inintegral form, XC =
∫xdm/
∫dm, where
dm = ρ(x, y, z)dV is di�erential of mass.
PROB 27. Two slippery horizontal sur-faces form a step. A block with the sameheight as the step is pushed near the step,and a cylinder with radius r is placed onthe gap. Both the cylinder and the blockhave mass m. Find the normal force Nbetween the cylinder and the step at themoment when distance between the blockand the step is
√2r. Initially, the block
and the step were very close together andall bodies were at rest. Friction is zeroeverywhere. Will the cylinder first separ-ate from the block or the step?
√−
2 rm
m
r
It is easy to end up with very complic-ated expressions when solving this prob-lem, this may lead to mistakes. Thereforeit is wise to plan the solution carefully be-fore writing down any equations.
IDEA 34: Newton's laws are mostly used to�nd acceleration from force, but sometimesit is clever to �nd force from acceleration.
But how to find acceleration(s) in thatcase? It is entirely possible if we usemethod 6, but this path leads to longexpressions. A tactical suggestion: ifyou see that the solution is getting verycomplicated technically, take a break andthink if there is an easier way. There is a“coincidence” in this particular problem:straight lines drawn from the sphere’scentre to points of touching are perpen-dicular; can this perhaps help? It turnsout that it does.
IDEA 35: Pay attention to special cases anduse simpli�cations that they give rise to!
Let us remind what we learned in kin-ematics:
IDEA K29: In case of motion along a curve,the radial component (perpendicular to thetrajectory) of a point's acceleration v2/Ris determined by velocity v and radius ofcurvature R; the component along the tra-jectory is linear acceleration (equal to εR incase of rotational motion, ε is angular accel-eration).
The centre of mass of the cylinder under-goes rotational motion, method 6 is ne-cessary to find angular acceleration — butwe hoped to refrain from using it. An im-provement on idea 1 helps us out:
IDEA 36: Project Newton's 2nd law on theaxis perpendicular to an unwanted vector,e.g. an unknown force or the tangentialcomponent of acceleration.
We can easily find the cylinder’s velocity(and thus the radial component of accel-eration) if we use
IDEA 37: If energy is conserved (or itschange can be calculated from work doneetc), write it out immediately. Energy isconserved if there is no dissipation (friction,inelastic collisions etc) and external forcesacting on the system are static (e.g. a sta-tionary inclined plane);
forces changing in time (force acting ona moving point, moving inclined plane)change energy as well. Idea 31 helps towrite out conservation of energy (relationbetween bodies’ velocities!). To answerthe second question, we need
IDEA 38: Normal force vanishes at the mo-ment when a body detaches from a surface.
Also, review idea 31 for horizontal com-ponents of accelerations.
PROB 28. Light wheels with radius R areattached to a heavy axle. The system rollsalong a horizontal surface which suddenlyturns into a slope with angle α. For whichangles α will the wheels move without lift-ing off, i.e. touch the surface at all times?Mass of the wheels can be neglected. Theaxle is parallel to the boundary betweenhorizontal and sloped surfaces and has ve-locity v.
m
α
v
IDEA 39: To answer the question whethera body lifts o�, we have to �nd the pointon the non-lifting-o� trajectory with smal-lest normal force.
If normal force has to be negative at thatpoint, then the body lifts off; the criticalvalue is zero — compare with idea 38).Also, review ideas 1, 37 and K29.
PROB 29. A block with mass M lieson a horizontal slippery surface and alsotouches a vertical wall. In the upper sur-face of the block, there is a cavity with theshape of a half-cylinder with radius r. Asmall pellet with mass m is released at theupper edge of the cavity, on the side closer
to the wall. What is the maximum velocityof the block during its subsequent motion?Friction can be neglected.
r
m
M
IDEA 40: Conservation law can hold onlyduring some period of time.
IDEA 41: Momentum is conserved if thesum of external forces is zero; sometimesmomentum is conserved only along one axis.
You will also need idea 37.
IDEA 42: Velocity is maximal (or minimal)when acceleration (and net force) is zero(since 0= dv
dt = a); shift is extremal whenvelocity is zero. Possible other pairs: elec-trical charge (capacitor's voltage)-current,current-inductive emf, etc.
PROB 30. A light rod with length 3l isattached to the ceiling by two strings withequal lengths. Two balls with masses mand M are fixed to the rod, the distancebetween them and their distances from theends of the rod are all equal to l. Find thetension in the second string right after thefirst has been cut.
m
l
M
ll
There are several good solutions for thisproblem, all of which share applyingidea 34 and the need to find the angu-lar acceleration of the rod. Firstly, angu-lar acceleration of the rod can be foundfrom method 6 by choosing angle of ro-tation φ to be the generalised coordinate.
Secondly, we may use Newton’s 2nd lawfor rotational motion: we find the torqueon the rod about the point of attachmentof the second string and equate it to Iεwith angular acceleration ε and momentof inertia I = ml2 + 4Ml2. More gener-ally,
IDEA 43: When a body is rotating aroundthe axis s, the net torque it experiencesis M = Iε (not to be confused with thebody's mass), where I is its moment of iner-tia with respect to the axis s, I = ∑ mir2
i =∫r2 · dm =
∫r2ρ · dV and ri is the distance
of i-th particle from the axis s (the sumis evaluated over all particles of the body).Kinetic energy is K = 1
2 Iω2.
Once the angular acceleration is found, inorder to apply the idea 34 it may be help-ful to use
IDEA 44: The more general and sometimesindispensable form of Newton's 2nd law is
F = dPdt , where P is the net momentum
of the system and F is the sum of externalforces acting on the system. An analogous
formula is M = dLdt , where L is the net angu-
lar momentum of the system (with respect
to a given point) and M is the sum of ex-ternal torques.
In our case this last method is fruitfulwhen applied both to forces and torques.
Another solution method is to con-sider the rod and the balls as three dif-ferent (interacting) bodies. Then the balls’accelerations can be found as per idea 31;one can also employ
IDEA 45: Net force and torque acting onvery light bodies (compared to other bod-ies) are zero.
Clearly if this were not true, a non-zeroforce would generate an infinite accelera-tion for a massless body.
PROB 31. An inextensible rough threadwith mass per unit length ρ and lengthL is thrown over a pulley such that thelength of one hanging end is l. The pul-ley is comprised of a hoop of mass m andradius R attached to a horizontal axle bylight spokes. The initially motionless sys-tem is let go. Find the force on the axleimmediately after the motion begins. Thefriction between the pulley and the axle isnegligible.
R
Why not proceed as follows: to find theforce, we will use idea 34; the accelerationof the system will be found using Method6. To apply idea 34 most handily, let usemploy
IDEA 46: Newton's 2nd law can be writtenas F = MaC, where aC is the accelerationof the centre of mass.
This idea is best utilised when a part ofthe system’s mass is motionless and onlya relatively small mass is moved about(just like in this case: the only differenceafter a small period of time is that a shortlength of thread is “lost” at one end and“gained” at the other end). Obviouslyidea 32 will be useful here, and idea 19will save you some effort. Bear in mindthat in this case we are not interested inthe centre of mass coordinate per se, butonly in its change as a function of time;therefore in the expression for this co-ordinate we can omit the terms that areindependent of time: their time derivat-
ives will vanish. The time-dependent partof the centre of mass coordinate should beexpressed using the same coordinate thatwe will use with Method 6 (since Method6 will produce its second derivative withrespect to time). A technical bit of ad-vice may help: a vector is specified by (a)its magnitude and direction; (b) its projec-tions onto coordinate axes in a given co-ordinate system;
IDEA 47: sometimes it is easier to computethe components of a vector, even if we areinterested in its magnitude only.
Above all, this applies when the directionof the vector is neither known nor appar-ent. In this instance, we should find Fxand Fy in a suitable coordinate system.
PROB 32. A thread is thrown over a pul-ley. At its both ends there are two blockswith equal masses. Initially the two blocksare at the same height. One of them isinstantaneously given a small horizontalvelocity v. Which of the two blocks willreach higher during the subsequent mo-tion? The pulley’s mass is negligible.
v
This problem is really tough, because thekey to the solution is a very specific andrarely used
IDEA 48: If the centre of mass of a systemcannot move, then the net force acting onit is zero.
Here the centre of mass can move abouta little bit, but in the longer term (aver-aged over one period of the pendulum-like motion of the kicked block — cf. idea
22) it is motionless: the blocks have thesame mass and if one of them rises, thenin the expression for the centre of massthis will be compensated by the descentof the other block. This is also true forthe horizontal coordinate of the centre ofmass, but it is enough to consider the ver-tical coordinate only to solve the problem.Let us also bring up the rather obvious
FACT 10: the tension in a weightless threadthrown over a weightless pulley or pulledalong a frictionless surface is the same every-where.
The solution algorithm is then as follows:we write down Newton’s 2nd law for (a)the system made out of two blocks and(b) one block; we average both equationsand use the equality apparent from (a)to find the average tension in the thread,which we then substitute into equation(b). Based on idea 22, we partition the ten-sion in the thread into the average and thehigh-frequency component and use idea16.
PROB 33. A system of blocks sits ona smooth surface, as shown in the fig-ure. The coefficient of friction betweenthe blocks is µ, while that between theblocks and the surface is µ = 0.
m m
x
M MF
The bottom right block is being pulled bya force F. Find the accelerations of allblocks.
IDEA 49: When bodies are connected byfrictional forces, then to answer some ques-tions fully one needs to consider all possiblecombinations of there being relative slippingbetween all possible touching surfaces.
For example, if we are to assume thatthere is no slipping between two touch-ing bodies, then they could be treated asa whole. Then one should find the fric-tional force Fh between the bodies and de-termine when the assumption holds, orwhen is Fh less that the maximum staticfriction force µN.
PROB 34. A billiard ball hits another sta-tionary billiard ball. At which collectionof points could the stationary ball be po-sitioned such that it would be possibleto achieve the situation where both ballswill fall into two (different) pockets on thetable? The collisions are perfectly elastic,the balls are perfectly slippery (hence therotation of the balls is negligible).
IDEA 50: If an absolutely elastic ball hitsanother motionless identical ball and the ro-tation (rolling) of the balls can be ignored,then upon impact there will be a right anglebetween the velocity vectors of the two balls.
To prove this, note that the three velocityvectors (velocity before and the two ve-locities after the impact) form a trianglebecause of the momentum conservationlaw. The conservation of energy meansthat the sides of the triangle satisfy Py-thagore’s theorem. A special case of thisresult is (see the problem after next)
FACT 11: When an elastic ball undergoes acentral collision with another identical sta-tionary ball, then the �rst ball stops and thesecond gains the velocity of the �rst ball.
PROB 35. An absolutely elastic and slip-pery billiard ball is moving with velocity vtoward two motionless identical balls. Themotionless balls are touching and theircentres lie on a straight line that is per-pendicular to the incoming ball’s velocityvector. The moving ball is directed ex-actly toward the touching point of the twoballs. Which velocity will the incoming
ball have after the collisions? Considertwo scenarios: (a) the incoming ball hitsexactly in the middle between the balls; (b)its trajectory is a little bit off and it hits oneof the stationary balls marginally earlier.
v
To answer the first question, it is neces-sary to use
IDEA 51: collisions (and other many-bodyinteractions, like the motion of balls con-nected by threads or springs) are easier totreated in the centre of mass system, be-cause in that system the momentum con-servation is the easiest to write down (thenet momentum is zero).
Also, do not forget idea 37! For the secondquestion, let us use
IDEA 52: if a force acting on a body dur-ing a known time does not change direc-tion, then the transferred momentum hasthe same direction as the force.
PROB 36. n absolutely elastic beads aresliding along the frictionless wire. Whatis the maximum possible number of col-lisions? The sizes of the beads are negli-gible, and so is the probability that morethan two beads will collide at the sametime.
IDEA 53: Representing the process visually,e.g. with a graph, tends to be great help.
Here is an auxiliary question: whatwould the elastic collision of two balls onan x − t diagram look like?
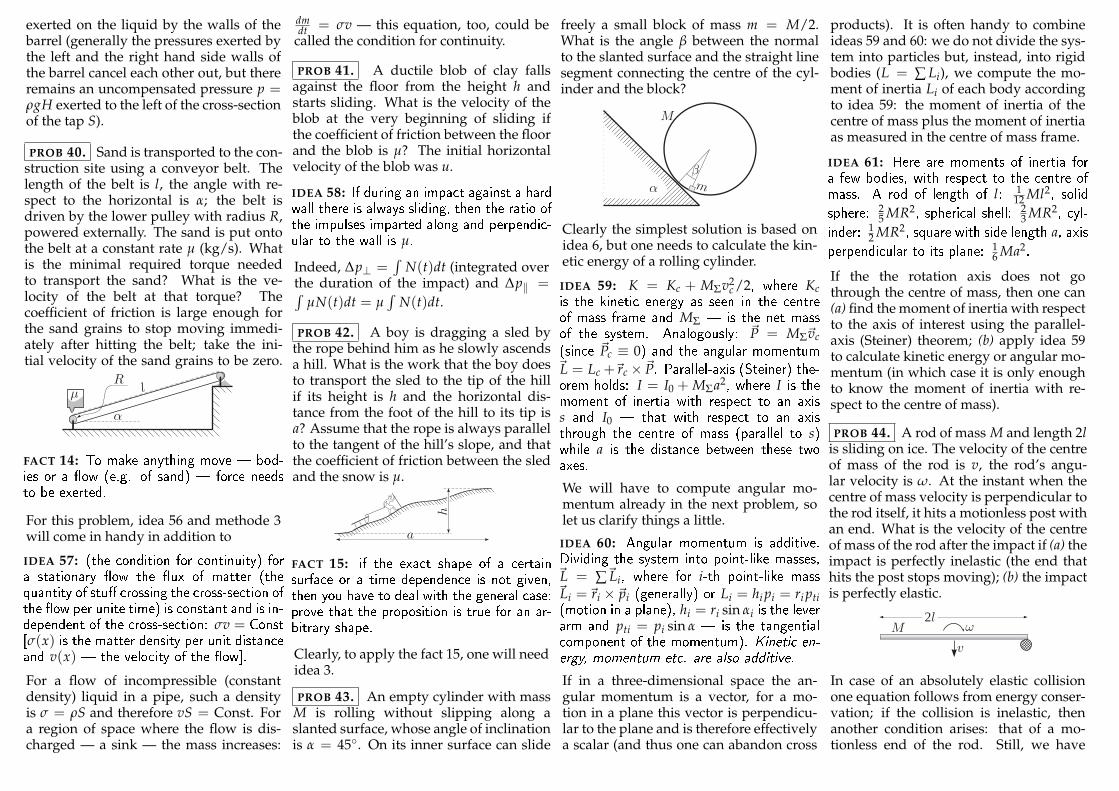
PROB 37. A plank of length L and massM is lying on a smooth horisontal surface;on its one end lies a small block of massm. The coefficient of friction between theblock and the plank is µ. What is the min-imal velocity v that needs to be impartedto the plank with a quick shove such that
during the subsequent motion the blockwould slide the whole length of the boardand then would fall off the plank? The sizeof the block is negligible.
Lµµ=0 mM
v
This problem has two more or less equi-valent solutions. First, we could solve itusing idea 6. Second, we could use ideas37 and 51, further employing
IDEA 54: if a body slides along a level sur-face, then the energy that gets converted toheat is equal to the product of the frictionforce and the length of the sliding track.
Indeed, the friction force has a constantmagnitude and, as seen in the referenceframe of the support, it is always parallelto displacement.
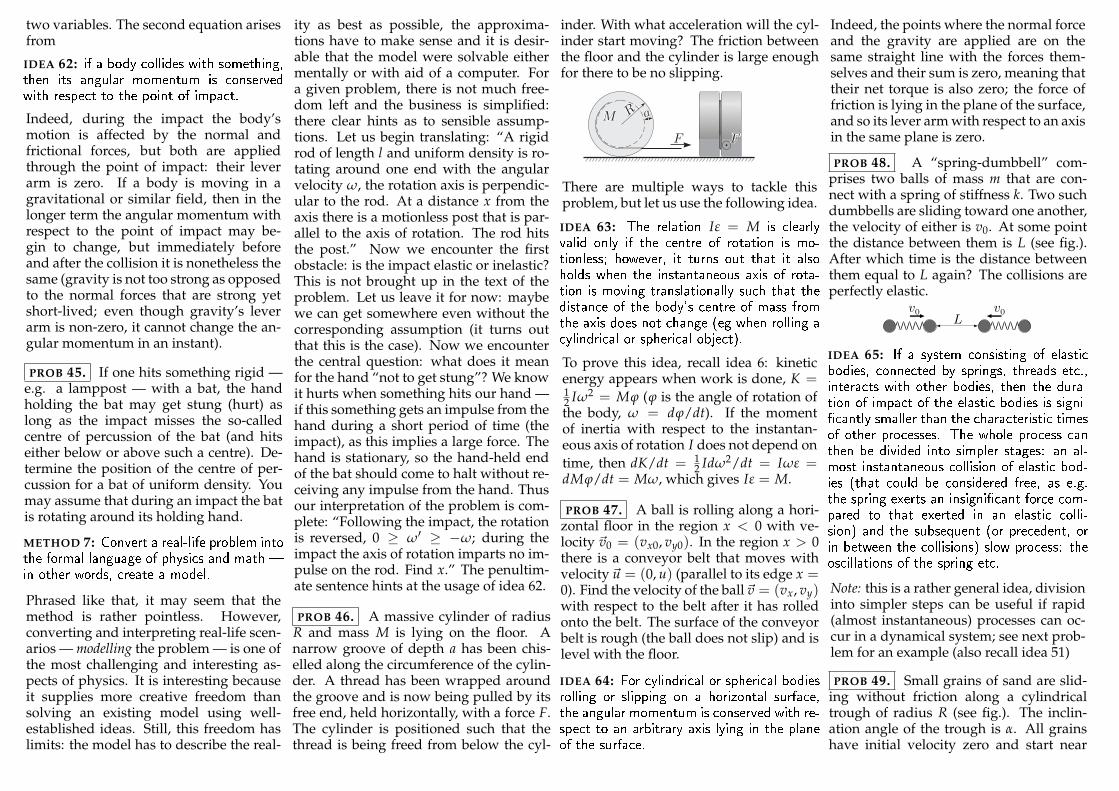
PROB 38. The given figure has been pro-duced off a stroboscopic photograph andit depicts the collision of two balls of equaldiameters but different masses. The arrownotes the direction of motion of one of theballs before the impact. Find the ratio ofthe masses of the two balls and show whatthe direction of motion for the second ballwas before the impact.
IDEA 55: sometimes it is bene�cial to treatmomenta as vectors, treating their vectorialsums and di�erences using triangle or par-allelogram rules (this is also true of othervectorial quantities: displacements, velocit-ies, accelerations, forces etc.)
To be more specific: when two bodies in-teract, the vector of the impulse is equalto the vectorial difference of their two mo-menta. Cf. idea 5.
FACT 12: In a stroboscopic photograph, thevector from one position of the body to thenext is proportional to its velocity (vector).
FACT 13: (Newton's 3rd law) if two bodieshave interacted, the changes of momenta ofthe two bodies are equal and opposite.
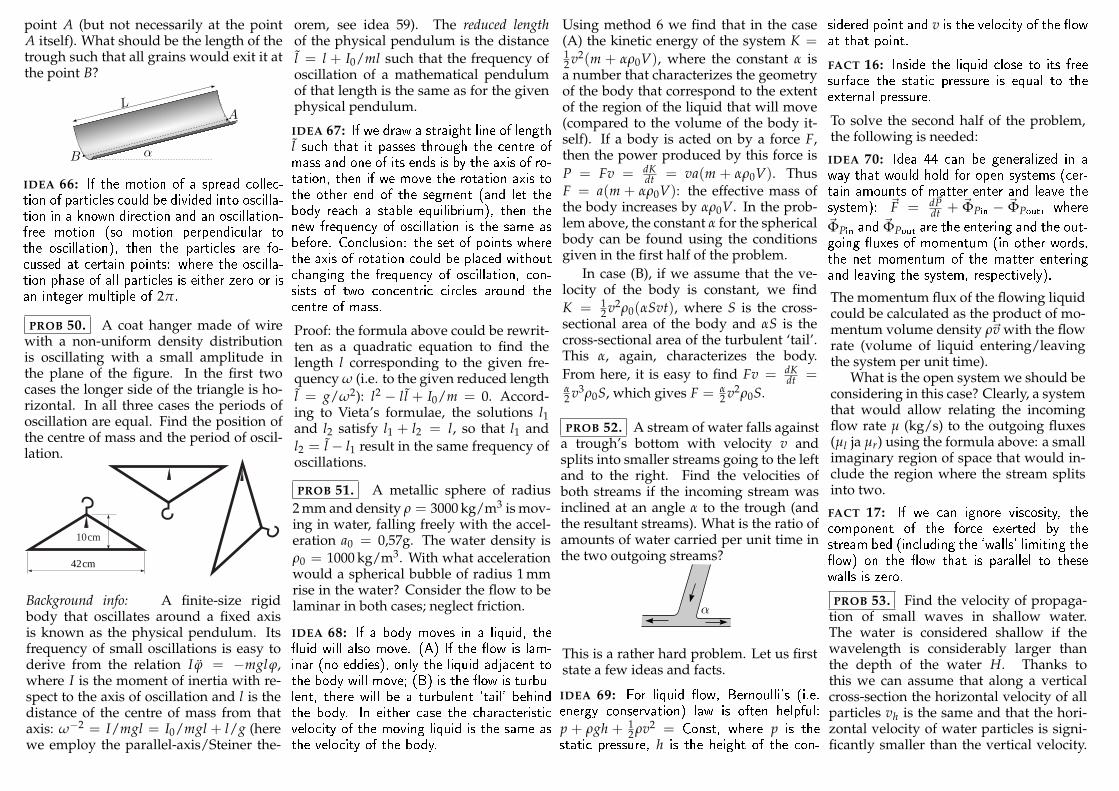
PROB 39. There are two barrels (A andB) whose taps have different design, seefigure. The tap is opened, the height of thewater surface from the tap is H. What ve-locity does the water stream leave the bar-rels with?
HH
A B
IDEA 56: If it seems that it is possible tosolve a problem using both energy and mo-mentum conservation, then at least one ofthese is not actually conserved!
It could not be otherwise: the answers are,after all, different. It pays to be attentivehere. While designing the tap A, therewas a clear attempt to preserve the lam-inarity of the flow: energy is conserved.However, if, motivated by method 3, wewere to write down the momentum givento the stream by the air pressure duringan infinitesimal time dt — pSdt (whereS is the tap’s area of cross-section), wewould see that, owing to the flow of wa-ter, p = ρg (cf. dynamical pressure,Bernoulli’s law!). On the other hand, fortap B the laminar flow is not preserved;there will be eddies and loss of energy. Wecould nonetheless work with momentum:we write the expression for the pressure
exerted on the liquid by the walls of thebarrel (generally the pressures exerted bythe left and the right hand side walls ofthe barrel cancel each other out, but thereremains an uncompensated pressure p =ρgH exerted to the left of the cross-sectionof the tap S).
PROB 40. Sand is transported to the con-struction site using a conveyor belt. Thelength of the belt is l, the angle with re-spect to the horizontal is α; the belt isdriven by the lower pulley with radius R,powered externally. The sand is put ontothe belt at a constant rate µ (kg/s). Whatis the minimal required torque neededto transport the sand? What is the ve-locity of the belt at that torque? Thecoefficient of friction is large enough forthe sand grains to stop moving immedi-ately after hitting the belt; take the ini-tial velocity of the sand grains to be zero.
α
µ lR
FACT 14: To make anything move � bod-ies or a �ow (e.g. of sand) � force needsto be exerted.
For this problem, idea 56 and methode 3will come in handy in addition to
IDEA 57: (the condition for continuity) fora stationary �ow the �ux of matter (thequantity of stu� crossing the cross-section ofthe �ow per unite time) is constant and is in-dependent of the cross-section: σv = Const[σ(x) is the matter density per unit distanceand v(x) � the velocity of the �ow].
For a flow of incompressible (constantdensity) liquid in a pipe, such a densityis σ = ρS and therefore vS = Const. Fora region of space where the flow is dis-charged — a sink — the mass increases:
dmdt = σv — this equation, too, could be
called the condition for continuity.
PROB 41. A ductile blob of clay fallsagainst the floor from the height h andstarts sliding. What is the velocity of theblob at the very beginning of sliding ifthe coefficient of friction between the floorand the blob is µ? The initial horizontalvelocity of the blob was u.
IDEA 58: If during an impact against a hardwall there is always sliding, then the ratio ofthe impulses imparted along and perpendic-ular to the wall is µ.
Indeed, ∆p⊥ =∫
N(t)dt (integrated overthe duration of the impact) and ∆p∥ =∫
µN(t)dt = µ∫
N(t)dt.
PROB 42. A boy is dragging a sled bythe rope behind him as he slowly ascendsa hill. What is the work that the boy doesto transport the sled to the tip of the hillif its height is h and the horizontal dis-tance from the foot of the hill to its tip isa? Assume that the rope is always parallelto the tangent of the hill’s slope, and thatthe coefficient of friction between the sledand the snow is µ.
h
a
FACT 15: if the exact shape of a certainsurface or a time dependence is not given,then you have to deal with the general case:prove that the proposition is true for an ar-bitrary shape.
Clearly, to apply the fact 15, one will needidea 3.
PROB 43. An empty cylinder with massM is rolling without slipping along aslanted surface, whose angle of inclinationis α = 45◦. On its inner surface can slide
freely a small block of mass m = M/2.What is the angle β between the normalto the slanted surface and the straight linesegment connecting the centre of the cyl-inder and the block?
β
α m
M
Clearly the simplest solution is based onidea 6, but one needs to calculate the kin-etic energy of a rolling cylinder.
IDEA 59: K = Kc + MΣv2c /2, where Kc
is the kinetic energy as seen in the centreof mass frame and MΣ � is the net massof the system. Analogously: P = MΣvc(since Pc ≡ 0) and the angular momentum
L = Lc + rc × P. Parallel-axis (Steiner) the-orem holds: I = I0 + MΣa2, where I is themoment of inertia with respect to an axiss and I0 � that with respect to an axisthrough the centre of mass (parallel to s)while a is the distance between these twoaxes.
We will have to compute angular mo-mentum already in the next problem, solet us clarify things a little.
IDEA 60: Angular momentum is additive.Dividing the system into point-like masses,L = ∑ Li, where for i-th point-like massLi = ri × pi (generally) or Li = hi pi = ri pti(motion in a plane), hi = ri sin αi is the leverarm and pti = pi sin α � is the tangentialcomponent of the momentum). Kinetic en-ergy, momentum etc. are also additive.
If in a three-dimensional space the an-gular momentum is a vector, for a mo-tion in a plane this vector is perpendicu-lar to the plane and is therefore effectivelya scalar (and thus one can abandon cross
products). It is often handy to combineideas 59 and 60: we do not divide the sys-tem into particles but, instead, into rigidbodies (L = ∑ Li), we compute the mo-ment of inertia Li of each body accordingto idea 59: the moment of inertia of thecentre of mass plus the moment of inertiaas measured in the centre of mass frame.
IDEA 61: Here are moments of inertia fora few bodies, with respect to the centre ofmass. A rod of length of l: 1
12 Ml2, solid
sphere: 25 MR2, spherical shell: 2
3 MR2, cyl-
inder: 12 MR2, square with side length a, axis
perpendicular to its plane: 16 Ma2.
If the the rotation axis does not gothrough the centre of mass, then one can(a) find the moment of inertia with respectto the axis of interest using the parallel-axis (Steiner) theorem; (b) apply idea 59to calculate kinetic energy or angular mo-mentum (in which case it is only enoughto know the moment of inertia with re-spect to the centre of mass).
PROB 44. A rod of mass M and length 2lis sliding on ice. The velocity of the centreof mass of the rod is v, the rod’s angu-lar velocity is ω. At the instant when thecentre of mass velocity is perpendicular tothe rod itself, it hits a motionless post withan end. What is the velocity of the centreof mass of the rod after the impact if (a) theimpact is perfectly inelastic (the end thathits the post stops moving); (b) the impactis perfectly elastic.
v
ωM2l
In case of an absolutely elastic collisionone equation follows from energy conser-vation; if the collision is inelastic, thenanother condition arises: that of a mo-tionless end of the rod. Still, we have
two variables. The second equation arisesfrom
IDEA 62: if a body collides with something,then its angular momentum is conservedwith respect to the point of impact.
Indeed, during the impact the body’smotion is affected by the normal andfrictional forces, but both are appliedthrough the point of impact: their leverarm is zero. If a body is moving in agravitational or similar field, then in thelonger term the angular momentum withrespect to the point of impact may be-gin to change, but immediately beforeand after the collision it is nonetheless thesame (gravity is not too strong as opposedto the normal forces that are strong yetshort-lived; even though gravity’s leverarm is non-zero, it cannot change the an-gular momentum in an instant).
PROB 45. If one hits something rigid —e.g. a lamppost — with a bat, the handholding the bat may get stung (hurt) aslong as the impact misses the so-calledcentre of percussion of the bat (and hitseither below or above such a centre). De-termine the position of the centre of per-cussion for a bat of uniform density. Youmay assume that during an impact the batis rotating around its holding hand.
METHOD 7: Convert a real-life problem intothe formal language of physics and math �in other words, create a model.
Phrased like that, it may seem that themethod is rather pointless. However,converting and interpreting real-life scen-arios — modelling the problem — is one ofthe most challenging and interesting as-pects of physics. It is interesting becauseit supplies more creative freedom thansolving an existing model using well-established ideas. Still, this freedom haslimits: the model has to describe the real-
ity as best as possible, the approxima-tions have to make sense and it is desir-able that the model were solvable eithermentally or with aid of a computer. Fora given problem, there is not much free-dom left and the business is simplified:there clear hints as to sensible assump-tions. Let us begin translating: “A rigidrod of length l and uniform density is ro-tating around one end with the angularvelocity ω, the rotation axis is perpendic-ular to the rod. At a distance x from theaxis there is a motionless post that is par-allel to the axis of rotation. The rod hitsthe post.” Now we encounter the firstobstacle: is the impact elastic or inelastic?This is not brought up in the text of theproblem. Let us leave it for now: maybewe can get somewhere even without thecorresponding assumption (it turns outthat this is the case). Now we encounterthe central question: what does it meanfor the hand “not to get stung”? We knowit hurts when something hits our hand —if this something gets an impulse from thehand during a short period of time (theimpact), as this implies a large force. Thehand is stationary, so the hand-held endof the bat should come to halt without re-ceiving any impulse from the hand. Thusour interpretation of the problem is com-plete: “Following the impact, the rotationis reversed, 0 ≥ ω′ ≥ −ω; during theimpact the axis of rotation imparts no im-pulse on the rod. Find x.” The penultim-ate sentence hints at the usage of idea 62.
PROB 46. A massive cylinder of radiusR and mass M is lying on the floor. Anarrow groove of depth a has been chis-elled along the circumference of the cylin-der. A thread has been wrapped aroundthe groove and is now being pulled by itsfree end, held horizontally, with a force F.The cylinder is positioned such that thethread is being freed from below the cyl-
inder. With what acceleration will the cyl-inder start moving? The friction betweenthe floor and the cylinder is large enoughfor there to be no slipping.
F
M aR
F⊙
There are multiple ways to tackle thisproblem, but let us use the following idea.
IDEA 63: The relation Iε = M is clearlyvalid only if the centre of rotation is mo-tionless; however, it turns out that it alsoholds when the instantaneous axis of rota-tion is moving translationally such that thedistance of the body's centre of mass fromthe axis does not change (eg when rolling acylindrical or spherical object).
To prove this idea, recall idea 6: kineticenergy appears when work is done, K =12 Iω2 = Mφ (φ is the angle of rotation ofthe body, ω = dφ/dt). If the momentof inertia with respect to the instantan-eous axis of rotation I does not depend ontime, then dK/dt = 1
2 Idω2/dt = Iωε =dMφ/dt = Mω, which gives Iε = M.
PROB 47. A ball is rolling along a hori-zontal floor in the region x < 0 with ve-locity v0 = (vx0, vy0). In the region x > 0there is a conveyor belt that moves withvelocity u = (0, u) (parallel to its edge x =0). Find the velocity of the ball v = (vx, vy)with respect to the belt after it has rolledonto the belt. The surface of the conveyorbelt is rough (the ball does not slip) and islevel with the floor.
IDEA 64: For cylindrical or spherical bodiesrolling or slipping on a horizontal surface,the angular momentum is conserved with re-spect to an arbitrary axis lying in the planeof the surface.
Indeed, the points where the normal forceand the gravity are applied are on thesame straight line with the forces them-selves and their sum is zero, meaning thattheir net torque is also zero; the force offriction is lying in the plane of the surface,and so its lever arm with respect to an axisin the same plane is zero.
PROB 48. A “spring-dumbbell” com-prises two balls of mass m that are con-nect with a spring of stiffness k. Two suchdumbbells are sliding toward one another,the velocity of either is v0. At some pointthe distance between them is L (see fig.).After which time is the distance betweenthem equal to L again? The collisions areperfectly elastic.
L
v0 v0
IDEA 65: If a system consisting of elasticbodies, connected by springs, threads etc.,interacts with other bodies, then the dura-tion of impact of the elastic bodies is signi-�cantly smaller than the characteristic timesof other processes. The whole process canthen be divided into simpler stages: an al-most instantaneous collision of elastic bod-ies (that could be considered free, as e.g.the spring exerts an insigni�cant force com-pared to that exerted in an elastic colli-sion) and the subsequent (or precedent, orin between the collisions) slow process: theoscillations of the spring etc.
Note: this is a rather general idea, divisioninto simpler steps can be useful if rapid(almost instantaneous) processes can oc-cur in a dynamical system; see next prob-lem for an example (also recall idea 51)
PROB 49. Small grains of sand are slid-ing without friction along a cylindricaltrough of radius R (see fig.). The inclin-ation angle of the trough is α. All grainshave initial velocity zero and start near
point A (but not necessarily at the pointA itself). What should be the length of thetrough such that all grains would exit it atthe point B?
L
α
A
B
IDEA 66: If the motion of a spread collec-tion of particles could be divided into oscilla-tion in a known direction and an oscillation-free motion (so motion perpendicular tothe oscillation), then the particles are fo-cussed at certain points: where the oscilla-tion phase of all particles is either zero or isan integer multiple of 2π.
PROB 50. A coat hanger made of wirewith a non-uniform density distributionis oscillating with a small amplitude inthe plane of the figure. In the first twocases the longer side of the triangle is ho-rizontal. In all three cases the periods ofoscillation are equal. Find the position ofthe centre of mass and the period of oscil-lation.
42cm
10cm
Background info: A finite-size rigidbody that oscillates around a fixed axisis known as the physical pendulum. Itsfrequency of small oscillations is easy toderive from the relation I φ = −mglφ,where I is the moment of inertia with re-spect to the axis of oscillation and l is thedistance of the centre of mass from thataxis: ω−2 = I/mgl = I0/mgl + l/g (herewe employ the parallel-axis/Steiner the-
orem, see idea 59). The reduced lengthof the physical pendulum is the distancel = l + I0/ml such that the frequency ofoscillation of a mathematical pendulumof that length is the same as for the givenphysical pendulum.
IDEA 67: If we draw a straight line of lengthl such that it passes through the centre ofmass and one of its ends is by the axis of ro-tation, then if we move the rotation axis tothe other end of the segment (and let thebody reach a stable equilibrium), then thenew frequency of oscillation is the same asbefore. Conclusion: the set of points wherethe axis of rotation could be placed withoutchanging the frequency of oscillation, con-sists of two concentric circles around thecentre of mass.
Proof: the formula above could be rewrit-ten as a quadratic equation to find thelength l corresponding to the given fre-quency ω (i.e. to the given reduced lengthl = g/ω2): l2 − ll + I0/m = 0. Accord-ing to Vieta’s formulae, the solutions l1and l2 satisfy l1 + l2 = l, so that l1 andl2 = l − l1 result in the same frequency ofoscillations.
PROB 51. A metallic sphere of radius2 mm and density ρ = 3000 kg/m3 is mov-ing in water, falling freely with the accel-eration a0 = 0,57g. The water density isρ0 = 1000 kg/m3. With what accelerationwould a spherical bubble of radius 1 mmrise in the water? Consider the flow to belaminar in both cases; neglect friction.
IDEA 68: If a body moves in a liquid, the�uid will also move. (A) If the �ow is lam-inar (no eddies), only the liquid adjacent tothe body will move; (B) is the �ow is turbu-lent, there will be a turbulent `tail' behindthe body. In either case the characteristicvelocity of the moving liquid is the same asthe velocity of the body.
Using method 6 we find that in the case(A) the kinetic energy of the system K =12 v2(m + αρ0V), where the constant α isa number that characterizes the geometryof the body that correspond to the extentof the region of the liquid that will move(compared to the volume of the body it-self). If a body is acted on by a force F,then the power produced by this force isP = Fv = dK
dt = va(m + αρ0V). ThusF = a(m + αρ0V): the effective mass ofthe body increases by αρ0V. In the prob-lem above, the constant α for the sphericalbody can be found using the conditionsgiven in the first half of the problem.
In case (B), if we assume that the ve-locity of the body is constant, we findK = 1
2 v2ρ0(αSvt), where S is the cross-sectional area of the body and αS is thecross-sectional area of the turbulent ‘tail’.This α, again, characterizes the body.From here, it is easy to find Fv = dK
dt =α2 v3ρ0S, which gives F = α
2 v2ρ0S.
PROB 52. A stream of water falls againsta trough’s bottom with velocity v andsplits into smaller streams going to the leftand to the right. Find the velocities ofboth streams if the incoming stream wasinclined at an angle α to the trough (andthe resultant streams). What is the ratio ofamounts of water carried per unit time inthe two outgoing streams?
α
This is a rather hard problem. Let us firststate a few ideas and facts.
IDEA 69: For liquid �ow, Bernoulli's (i.e.energy conservation) law is often helpful:p + ρgh + 1
2 ρv2 = Const, where p is thestatic pressure, h is the height of the con-
sidered point and v is the velocity of the �owat that point.
FACT 16: Inside the liquid close to its freesurface the static pressure is equal to theexternal pressure.
To solve the second half of the problem,the following is needed:
IDEA 70: Idea 44 can be generalized in away that would hold for open systems (cer-tain amounts of matter enter and leave thesystem): F = dP
dt + ΦPin − ΦPout, where
ΦPin and ΦPout are the entering and the out-going �uxes of momentum (in other words,the net momentum of the matter enteringand leaving the system, respectively).
The momentum flux of the flowing liquidcould be calculated as the product of mo-mentum volume density ρv with the flowrate (volume of liquid entering/leavingthe system per unit time).
What is the open system we should beconsidering in this case? Clearly, a systemthat would allow relating the incomingflow rate µ (kg/s) to the outgoing fluxes(µl ja µr) using the formula above: a smallimaginary region of space that would in-clude the region where the stream splitsinto two.
FACT 17: If we can ignore viscosity, thecomponent of the force exerted by thestream bed (including the `walls' limiting the�ow) on the �ow that is parallel to thesewalls is zero.
PROB 53. Find the velocity of propaga-tion of small waves in shallow water.The water is considered shallow if thewavelength is considerably larger thanthe depth of the water H. Thanks tothis we can assume that along a verticalcross-section the horizontal velocity of allparticles vh is the same and that the hori-zontal velocity of water particles is signi-ficantly smaller than the vertical velocity.
The smallness of the waves means thattheir height is significantly smaller thanthe depth of the water. This allows usto assume that the horizontal velocity ofthe water particles is significantly smallerthan the wave velocity, u.
IDEA 71: A standard method for �ndingthe velocity of propagation (or another char-acteristic) of a wave (or another structurewith persistent shape) is to choose a ref-erence system where the wave is at rest.In this frame, (a) continuity (idea 57) and(b) energy conservation (e.g. in the formof Bernoulli's law) hold. In certain cases en-ergy conservation law can be replaced by thebalance of forces.
(An alternative approach is to lineariseand solve a system of coupled partial dif-ferential equations.)
PROB 54. A small sphere with mass m =1 g is moving along a smooth surface, slid-ing back and forth and colliding elastic-ally with a wall and a block. The mass ofthe rectangular block is M = 1 kg, the ini-tial velocity of the sphere is v0 = 10 m/s.What is the velocity of the sphere at theinstant when the distance between thesphere and the wall has doubled as com-pared with the initial distance? By howmany times will the average force (aver-aged over time) exerted by the sphere onthe wall have changed?
IDEA 72: If a similar oscillatory motiontakes place, for which the parameters ofthe system change slowly (compared to theperiod of oscillation), then the so-calledadiabatic invariant I is conserved: it is thearea enclosed by the closed contour tracedby the trajectory of the system on the so-called phase diagram (where the coordinatesare the spatial coordinate x and momentumpx).
Let us be more precise here. The closedcontour is produced as a parametric curve(the so-called phase trajectory) x(t), px(t)if we trace the motion of the system dur-ing one full period T. The phase traject-ory is normally drawn with an arrow thatindicated the direction of motion. Theadiabatic invariant is not exactly and per-fectly conserved, but the precision withwhich it is conserved grows if the ratioτ/T grows, where τ is the characteristictime of change of the system’s paramet-ers.
Adiabatic invariant plays an instru-mental role in physics: from the adiabaticlaw in gases (compare the result of theprevious problem with the adiabatic ex-pansion law for an ideal gas with one de-gree of freedom!) and is applicable evenin quantum mechanics (the number ofquanta in the system — e.g. photons —is conserved if the parameters of the sys-tem are varied slowly).
REVISION PROBLEMS
PROB 55. A straight homogeneous rod isbeing externally supported against a ver-tical wall such that the angle between thewall and the rod is α < 90◦. For whichvalues of α can the rod remain stationarywhen thus supported? Consider two scen-arios: a) the wall is slippery and the flooris rough with the friction coefficient µ ; b)the floor is slippery and the wall is roughwith the friction coefficient µ.
PROB 56. A light stick rests with oneend against a vertical wall and another ona horizontal floor. A bug wants to crawldown the stick, from top to bottom. Howshould the bug’s acceleration depend onits distance from the top endpoint of thestick? The bug’s mass is m, the length ofthe stick is l, the angle between the floorand the stick is α and the stick’s mass is
negligible; both the floor and the wall areslippery (µ = 0). How long will it take thebug to reach the bottom of the stick havingstarted at the top (from rest)?
α
l
x
a
PROB 57. A wedge with the angle α atthe tip is lying on the horizontal floor.There is a hole with smooth walls in theceiling. A rod has been inserted snuglyinto that hole, and it can move up anddown without friction, while its axis isfixed to be vertical. The rod is suppor-ted against the wedge; the only point withfriction is the contact point of the wedgeand the rod: the friction coefficient there isµ. For which values of µ is it possible topush the wedge through, behind the rod,by only applying a sufficiently large hori-zontal force?
αµ F
PROB 58. Sometimes a contraption isused to hang pictures etc. on the wall,whose model will be presented below.Against a fixed vertical surface is an im-movable tilted plane, where the anglebetween the surface and the plane is α.There is a gap between the surface andthe plane, where a thin plate could be fit.The plate is positioned tightly against thevertical surface; the coefficient of frictionbetween them can be considered equal tozero. In the space between the plate andthe plane a cylinder of mass m can movefreely, its axis being horizontal and paral-lel to all considered surfaces. The cylin-
der rests on the plate and the plane andthe coefficients of friction on those twosurfaces are, respectively, µ1 and µ2. Forwhich values of the friction coefficients theplate will assuredly not fall down regard-less of its weight?
α
F
µ = 0
µ2
µ1
m
PROB 59. On top of a cylinder with ahorisontal axis a plank is placed, whoselength is l and thickness is h. For whichradius R of the cylinder the horizontal po-sition of the plank is stable?
R
l
PROB 60. A vessel in the shape of acylinder, whose height equals its radiusR and whose cavity is half-spherical, isfilled to the brim with water, turned up-side down and positioned on a horizontalsurface. The radius of the half-sphericalcavity is also R and there is a little hole inthe vessel’s bottom. From below the edgesof the freely lying vessel some water leaksout. How high will the remaining layer ofwater be, if the mass of the vessel is m andthe water density is ρ? If necessary, usethe formula for the volume of a slice of asphere (see Fig.): V = πH2(R − H/3).
hH V
PROB 61. A vertical cylindrical vesselwith radius R is rotating around its axis
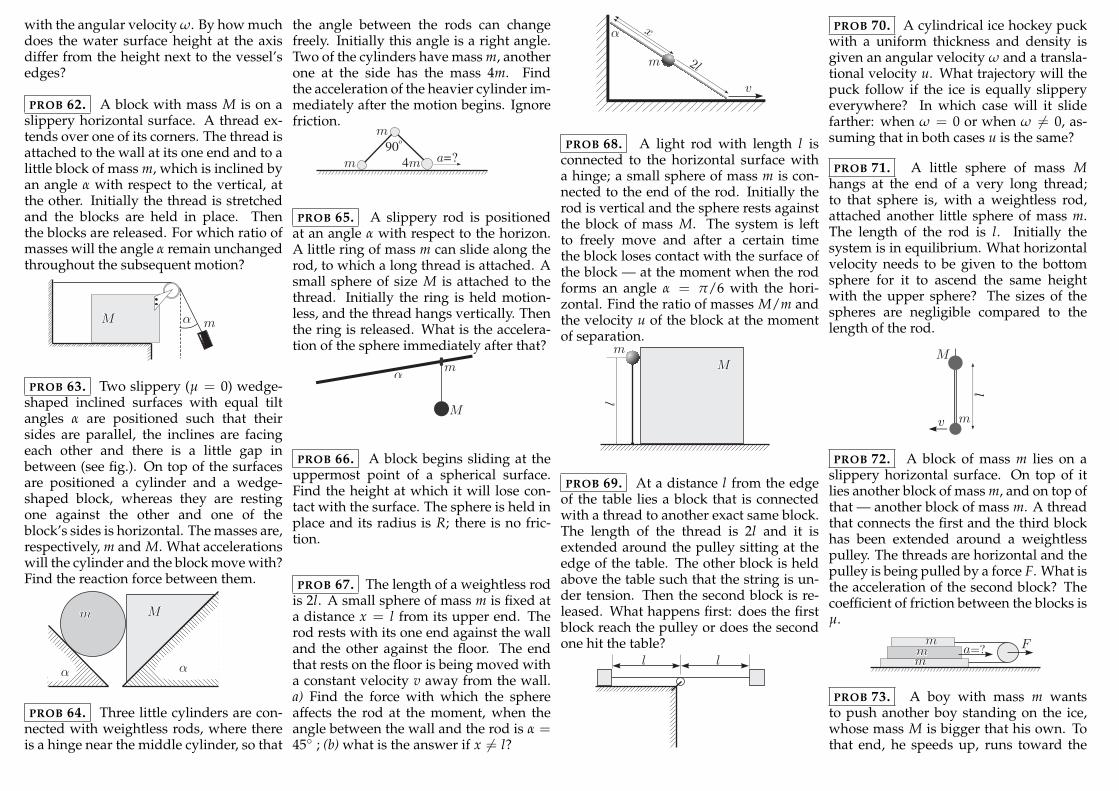
with the angular velocity ω. By how muchdoes the water surface height at the axisdiffer from the height next to the vessel’sedges?
PROB 62. A block with mass M is on aslippery horizontal surface. A thread ex-tends over one of its corners. The thread isattached to the wall at its one end and to alittle block of mass m, which is inclined byan angle α with respect to the vertical, atthe other. Initially the thread is stretchedand the blocks are held in place. Thenthe blocks are released. For which ratio ofmasses will the angle α remain unchangedthroughout the subsequent motion?
α mM
PROB 63. Two slippery (µ = 0) wedge-shaped inclined surfaces with equal tiltangles α are positioned such that theirsides are parallel, the inclines are facingeach other and there is a little gap inbetween (see fig.). On top of the surfacesare positioned a cylinder and a wedge-shaped block, whereas they are restingone against the other and one of theblock’s sides is horizontal. The masses are,respectively, m and M. What accelerationswill the cylinder and the block move with?Find the reaction force between them.
PROB 64. Three little cylinders are con-nected with weightless rods, where thereis a hinge near the middle cylinder, so that
the angle between the rods can changefreely. Initially this angle is a right angle.Two of the cylinders have mass m, anotherone at the side has the mass 4m. Findthe acceleration of the heavier cylinder im-mediately after the motion begins. Ignorefriction.
90o
m
m
4ma=?
PROB 65. A slippery rod is positionedat an angle α with respect to the horizon.A little ring of mass m can slide along therod, to which a long thread is attached. Asmall sphere of size M is attached to thethread. Initially the ring is held motion-less, and the thread hangs vertically. Thenthe ring is released. What is the accelera-tion of the sphere immediately after that?
m
M
PROB 66. A block begins sliding at theuppermost point of a spherical surface.Find the height at which it will lose con-tact with the surface. The sphere is held inplace and its radius is R; there is no fric-tion.
PROB 67. The length of a weightless rodis 2l. A small sphere of mass m is fixed ata distance x = l from its upper end. Therod rests with its one end against the walland the other against the floor. The endthat rests on the floor is being moved witha constant velocity v away from the wall.a) Find the force with which the sphereaffects the rod at the moment, when theangle between the wall and the rod is α =45◦ ; (b) what is the answer if x = l?
α
v
m
x
2l
PROB 68. A light rod with length l isconnected to the horizontal surface witha hinge; a small sphere of mass m is con-nected to the end of the rod. Initially therod is vertical and the sphere rests againstthe block of mass M. The system is leftto freely move and after a certain timethe block loses contact with the surface ofthe block — at the moment when the rodforms an angle α = π/6 with the hori-zontal. Find the ratio of masses M/m andthe velocity u of the block at the momentof separation.
m
l
M
PROB 69. At a distance l from the edgeof the table lies a block that is connectedwith a thread to another exact same block.The length of the thread is 2l and it isextended around the pulley sitting at theedge of the table. The other block is heldabove the table such that the string is un-der tension. Then the second block is re-leased. What happens first: does the firstblock reach the pulley or does the secondone hit the table?
l l
PROB 70. A cylindrical ice hockey puckwith a uniform thickness and density isgiven an angular velocity ω and a transla-tional velocity u. What trajectory will thepuck follow if the ice is equally slipperyeverywhere? In which case will it slidefarther: when ω = 0 or when ω = 0, as-suming that in both cases u is the same?
PROB 71. A little sphere of mass Mhangs at the end of a very long thread;to that sphere is, with a weightless rod,attached another little sphere of mass m.The length of the rod is l. Initially thesystem is in equilibrium. What horizontalvelocity needs to be given to the bottomsphere for it to ascend the same heightwith the upper sphere? The sizes of thespheres are negligible compared to thelength of the rod.
M
mv
l
PROB 72. A block of mass m lies on aslippery horizontal surface. On top of itlies another block of mass m, and on top ofthat — another block of mass m. A threadthat connects the first and the third blockhas been extended around a weightlesspulley. The threads are horizontal and thepulley is being pulled by a force F. What isthe acceleration of the second block? Thecoefficient of friction between the blocks isµ.
Fa=?
mmm
PROB 73. A boy with mass m wantsto push another boy standing on the ice,whose mass M is bigger that his own. Tothat end, he speeds up, runs toward the
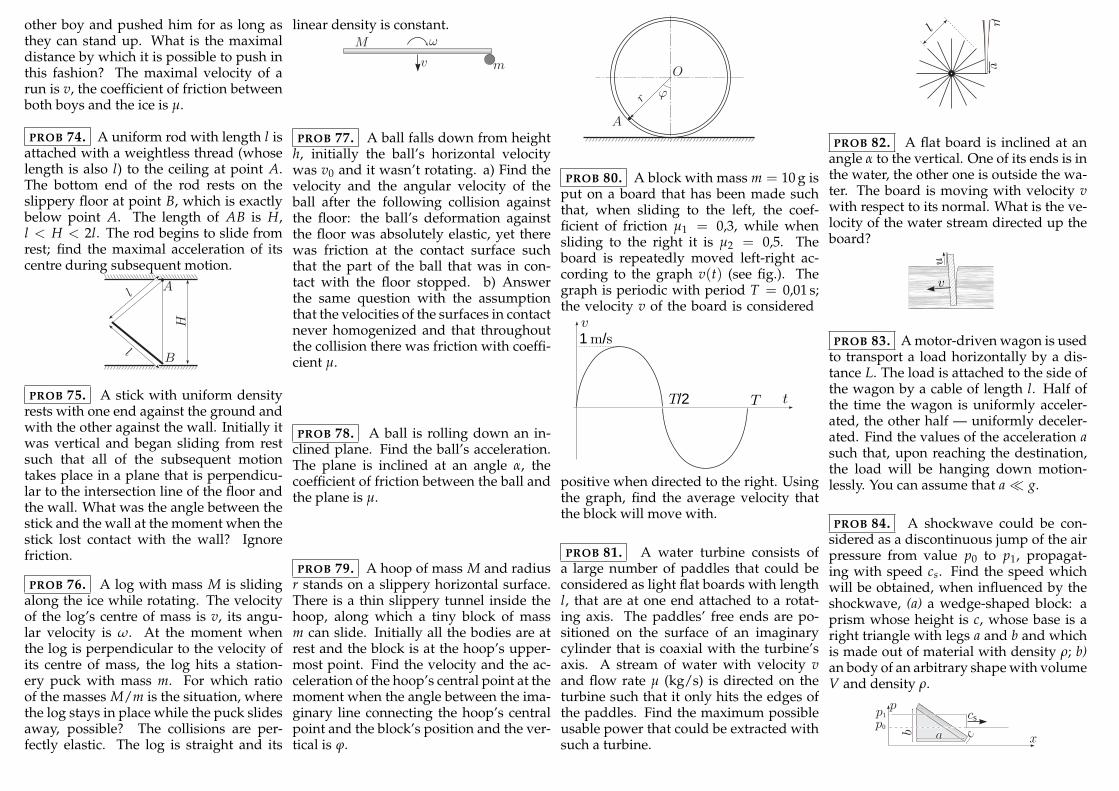
other boy and pushed him for as long asthey can stand up. What is the maximaldistance by which it is possible to push inthis fashion? The maximal velocity of arun is v, the coefficient of friction betweenboth boys and the ice is µ.
PROB 74. A uniform rod with length l isattached with a weightless thread (whoselength is also l) to the ceiling at point A.The bottom end of the rod rests on theslippery floor at point B, which is exactlybelow point A. The length of AB is H,l < H < 2l. The rod begins to slide fromrest; find the maximal acceleration of itscentre during subsequent motion.
l
l
H
A
B
PROB 75. A stick with uniform densityrests with one end against the ground andwith the other against the wall. Initially itwas vertical and began sliding from restsuch that all of the subsequent motiontakes place in a plane that is perpendicu-lar to the intersection line of the floor andthe wall. What was the angle between thestick and the wall at the moment when thestick lost contact with the wall? Ignorefriction.
PROB 76. A log with mass M is slidingalong the ice while rotating. The velocityof the log’s centre of mass is v, its angu-lar velocity is ω. At the moment whenthe log is perpendicular to the velocity ofits centre of mass, the log hits a station-ery puck with mass m. For which ratioof the masses M/m is the situation, wherethe log stays in place while the puck slidesaway, possible? The collisions are per-fectly elastic. The log is straight and its
linear density is constant.
v
ωM
m
PROB 77. A ball falls down from heighth, initially the ball’s horizontal velocitywas v0 and it wasn’t rotating. a) Find thevelocity and the angular velocity of theball after the following collision againstthe floor: the ball’s deformation againstthe floor was absolutely elastic, yet therewas friction at the contact surface suchthat the part of the ball that was in con-tact with the floor stopped. b) Answerthe same question with the assumptionthat the velocities of the surfaces in contactnever homogenized and that throughoutthe collision there was friction with coeffi-cient µ.
PROB 78. A ball is rolling down an in-clined plane. Find the ball’s acceleration.The plane is inclined at an angle α, thecoefficient of friction between the ball andthe plane is µ.
PROB 79. A hoop of mass M and radiusr stands on a slippery horizontal surface.There is a thin slippery tunnel inside thehoop, along which a tiny block of massm can slide. Initially all the bodies are atrest and the block is at the hoop’s upper-most point. Find the velocity and the ac-celeration of the hoop’s central point at themoment when the angle between the ima-ginary line connecting the hoop’s centralpoint and the block’s position and the ver-tical is φ.
ϕ
O
A
r
PROB 80. A block with mass m = 10 g isput on a board that has been made suchthat, when sliding to the left, the coef-ficient of friction µ1 = 0,3, while whensliding to the right it is µ2 = 0,5. Theboard is repeatedly moved left-right ac-cording to the graph v(t) (see fig.). Thegraph is periodic with period T = 0,01 s;the velocity v of the board is considered
tTT/2
v
1 m/s
positive when directed to the right. Usingthe graph, find the average velocity thatthe block will move with.
PROB 81. A water turbine consists ofa large number of paddles that could beconsidered as light flat boards with lengthl, that are at one end attached to a rotat-ing axis. The paddles’ free ends are po-sitioned on the surface of an imaginarycylinder that is coaxial with the turbine’saxis. A stream of water with velocity vand flow rate µ (kg/s) is directed on theturbine such that it only hits the edges ofthe paddles. Find the maximum possibleusable power that could be extracted withsuch a turbine.
v
l
µ
PROB 82. A flat board is inclined at anangle α to the vertical. One of its ends is inthe water, the other one is outside the wa-ter. The board is moving with velocity vwith respect to its normal. What is the ve-locity of the water stream directed up theboard?
v
u
PROB 83. A motor-driven wagon is usedto transport a load horizontally by a dis-tance L. The load is attached to the side ofthe wagon by a cable of length l. Half ofthe time the wagon is uniformly acceler-ated, the other half — uniformly deceler-ated. Find the values of the acceleration asuch that, upon reaching the destination,the load will be hanging down motion-lessly. You can assume that a ≪ g.
PROB 84. A shockwave could be con-sidered as a discontinuous jump of the airpressure from value p0 to p1, propagat-ing with speed cs. Find the speed whichwill be obtained, when influenced by theshockwave, (a) a wedge-shaped block: aprism whose height is c, whose base is aright triangle with legs a and b and whichis made out of material with density ρ; b)an body of an arbitrary shape with volumeV and density ρ.
cs
cb
x
pp1
p0
a
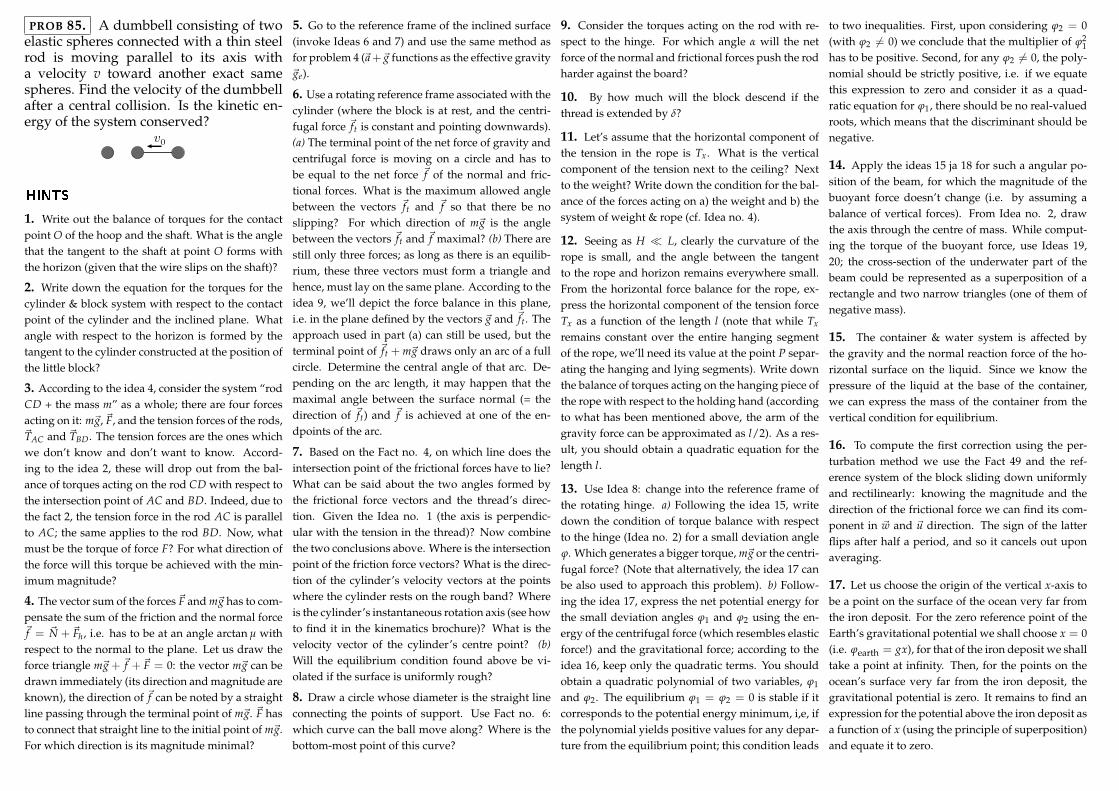
PROB 85. A dumbbell consisting of twoelastic spheres connected with a thin steelrod is moving parallel to its axis witha velocity v toward another exact samespheres. Find the velocity of the dumbbellafter a central collision. Is the kinetic en-ergy of the system conserved?
v0
HINTS
1. Write out the balance of torques for the contactpoint O of the hoop and the shaft. What is the anglethat the tangent to the shaft at point O forms withthe horizon (given that the wire slips on the shaft)?
2. Write down the equation for the torques for thecylinder & block system with respect to the contactpoint of the cylinder and the inclined plane. Whatangle with respect to the horizon is formed by thetangent to the cylinder constructed at the position ofthe little block?
3. According to the idea 4, consider the system “rodCD + the mass m” as a whole; there are four forcesacting on it: mg, F, and the tension forces of the rods,TAC and TBD . The tension forces are the ones whichwe don’t know and don’t want to know. Accord-ing to the idea 2, these will drop out from the bal-ance of torques acting on the rod CD with respect tothe intersection point of AC and BD. Indeed, due tothe fact 2, the tension force in the rod AC is parallelto AC; the same applies to the rod BD. Now, whatmust be the torque of force F? For what direction ofthe force will this torque be achieved with the min-imum magnitude?
4. The vector sum of the forces F and mg has to com-pensate the sum of the friction and the normal forcef = N + Fh, i.e. has to be at an angle arctan µ withrespect to the normal to the plane. Let us draw theforce triangle mg + f + F = 0: the vector mg can bedrawn immediately (its direction and magnitude areknown), the direction of f can be noted by a straightline passing through the terminal point of mg. F hasto connect that straight line to the initial point of mg.For which direction is its magnitude minimal?
5. Go to the reference frame of the inclined surface(invoke Ideas 6 and 7) and use the same method asfor problem 4 (a+ g functions as the effective gravityge).
6. Use a rotating reference frame associated with thecylinder (where the block is at rest, and the centri-fugal force ft is constant and pointing downwards).(a) The terminal point of the net force of gravity andcentrifugal force is moving on a circle and has tobe equal to the net force f of the normal and fric-tional forces. What is the maximum allowed anglebetween the vectors ft and f so that there be noslipping? For which direction of mg is the anglebetween the vectors ft and f maximal? (b) There arestill only three forces; as long as there is an equilib-rium, these three vectors must form a triangle andhence, must lay on the same plane. According to theidea 9, we’ll depict the force balance in this plane,i.e. in the plane defined by the vectors g and ft. Theapproach used in part (a) can still be used, but theterminal point of ft + mg draws only an arc of a fullcircle. Determine the central angle of that arc. De-pending on the arc length, it may happen that themaximal angle between the surface normal (= thedirection of ft) and f is achieved at one of the en-dpoints of the arc.
7. Based on the Fact no. 4, on which line does theintersection point of the frictional forces have to lie?What can be said about the two angles formed bythe frictional force vectors and the thread’s direc-tion. Given the Idea no. 1 (the axis is perpendic-ular with the tension in the thread)? Now combinethe two conclusions above. Where is the intersectionpoint of the friction force vectors? What is the direc-tion of the cylinder’s velocity vectors at the pointswhere the cylinder rests on the rough band? Whereis the cylinder’s instantaneous rotation axis (see howto find it in the kinematics brochure)? What is thevelocity vector of the cylinder’s centre point? (b)Will the equilibrium condition found above be vi-olated if the surface is uniformly rough?
8. Draw a circle whose diameter is the straight lineconnecting the points of support. Use Fact no. 6:which curve can the ball move along? Where is thebottom-most point of this curve?
9. Consider the torques acting on the rod with re-spect to the hinge. For which angle α will the netforce of the normal and frictional forces push the rodharder against the board?
10. By how much will the block descend if thethread is extended by δ?
11. Let’s assume that the horizontal component ofthe tension in the rope is Tx . What is the verticalcomponent of the tension next to the ceiling? Nextto the weight? Write down the condition for the bal-ance of the forces acting on a) the weight and b) thesystem of weight & rope (cf. Idea no. 4).
12. Seeing as H ≪ L, clearly the curvature of therope is small, and the angle between the tangentto the rope and horizon remains everywhere small.From the horizontal force balance for the rope, ex-press the horizontal component of the tension forceTx as a function of the length l (note that while Tx
remains constant over the entire hanging segmentof the rope, we’ll need its value at the point P separ-ating the hanging and lying segments). Write downthe balance of torques acting on the hanging piece ofthe rope with respect to the holding hand (accordingto what has been mentioned above, the arm of thegravity force can be approximated as l/2). As a res-ult, you should obtain a quadratic equation for thelength l.
13. Use Idea 8: change into the reference frame ofthe rotating hinge. a) Following the idea 15, writedown the condition of torque balance with respectto the hinge (Idea no. 2) for a small deviation angleφ. Which generates a bigger torque, mg or the centri-fugal force? (Note that alternatively, the idea 17 canbe also used to approach this problem). b) Follow-ing the idea 17, express the net potential energy forthe small deviation angles φ1 and φ2 using the en-ergy of the centrifugal force (which resembles elasticforce!) and the gravitational force; according to theidea 16, keep only the quadratic terms. You shouldobtain a quadratic polynomial of two variables, φ1
and φ2. The equilibrium φ1 = φ2 = 0 is stable if itcorresponds to the potential energy minimum, i,e, ifthe polynomial yields positive values for any depar-ture from the equilibrium point; this condition leads
to two inequalities. First, upon considering φ2 = 0(with φ2 = 0) we conclude that the multiplier of φ2
1has to be positive. Second, for any φ2 = 0, the poly-nomial should be strictly positive, i.e. if we equatethis expression to zero and consider it as a quad-ratic equation for φ1, there should be no real-valuedroots, which means that the discriminant should benegative.
14. Apply the ideas 15 ja 18 for such a angular po-sition of the beam, for which the magnitude of thebuoyant force doesn’t change (i.e. by assuming abalance of vertical forces). From Idea no. 2, drawthe axis through the centre of mass. While comput-ing the torque of the buoyant force, use Ideas 19,20; the cross-section of the underwater part of thebeam could be represented as a superposition of arectangle and two narrow triangles (one of them ofnegative mass).
15. The container & water system is affected bythe gravity and the normal reaction force of the ho-rizontal surface on the liquid. Since we know thepressure of the liquid at the base of the container,we can express the mass of the container from thevertical condition for equilibrium.
16. To compute the first correction using the per-turbation method we use the Fact 49 and the ref-erence system of the block sliding down uniformlyand rectilinearly: knowing the magnitude and thedirection of the frictional force we can find its com-ponent in w and u direction. The sign of the latterflips after half a period, and so it cancels out uponaveraging.
17. Let us choose the origin of the vertical x-axis tobe a point on the surface of the ocean very far fromthe iron deposit. For the zero reference point of theEarth’s gravitational potential we shall choose x = 0(i.e. φearth = gx), for that of the iron deposit we shalltake a point at infinity. Then, for the points on theocean’s surface very far from the iron deposit, thegravitational potential is zero. It remains to find anexpression for the potential above the iron deposit asa function of x (using the principle of superposition)and equate it to zero.
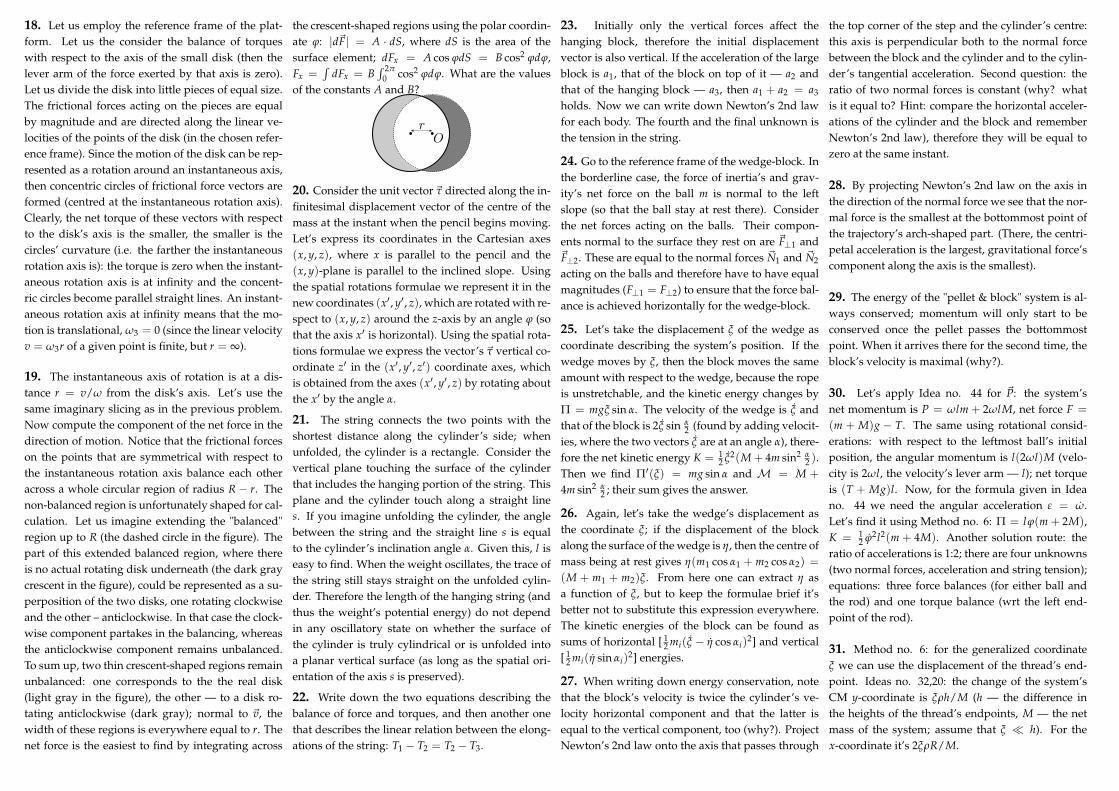
18. Let us employ the reference frame of the plat-form. Let us the consider the balance of torqueswith respect to the axis of the small disk (then thelever arm of the force exerted by that axis is zero).Let us divide the disk into little pieces of equal size.The frictional forces acting on the pieces are equalby magnitude and are directed along the linear ve-locities of the points of the disk (in the chosen refer-ence frame). Since the motion of the disk can be rep-resented as a rotation around an instantaneous axis,then concentric circles of frictional force vectors areformed (centred at the instantaneous rotation axis).Clearly, the net torque of these vectors with respectto the disk’s axis is the smaller, the smaller is thecircles’ curvature (i.e. the farther the instantaneousrotation axis is): the torque is zero when the instant-aneous rotation axis is at infinity and the concent-ric circles become parallel straight lines. An instant-aneous rotation axis at infinity means that the mo-tion is translational, ω3 = 0 (since the linear velocityv = ω3r of a given point is finite, but r = ∞).
19. The instantaneous axis of rotation is at a dis-tance r = v/ω from the disk’s axis. Let’s use thesame imaginary slicing as in the previous problem.Now compute the component of the net force in thedirection of motion. Notice that the frictional forceson the points that are symmetrical with respect tothe instantaneous rotation axis balance each otheracross a whole circular region of radius R − r. Thenon-balanced region is unfortunately shaped for cal-culation. Let us imagine extending the "balanced"region up to R (the dashed circle in the figure). Thepart of this extended balanced region, where thereis no actual rotating disk underneath (the dark graycrescent in the figure), could be represented as a su-perposition of the two disks, one rotating clockwiseand the other – anticlockwise. In that case the clock-wise component partakes in the balancing, whereasthe anticlockwise component remains unbalanced.To sum up, two thin crescent-shaped regions remainunbalanced: one corresponds to the the real disk(light gray in the figure), the other — to a disk ro-tating anticlockwise (dark gray); normal to v, thewidth of these regions is everywhere equal to r. Thenet force is the easiest to find by integrating across
the crescent-shaped regions using the polar coordin-ate φ: |dF| = A · dS, where dS is the area of thesurface element; dFx = A cos φdS = B cos2 φdφ,Fx =
∫dFx = B
∫ 2π0 cos2 φdφ. What are the values
of the constants A and B?
O
r
20. Consider the unit vector τ directed along the in-finitesimal displacement vector of the centre of themass at the instant when the pencil begins moving.Let’s express its coordinates in the Cartesian axes(x, y, z), where x is parallel to the pencil and the(x, y)-plane is parallel to the inclined slope. Usingthe spatial rotations formulae we represent it in thenew coordinates (x′, y′, z), which are rotated with re-spect to (x, y, z) around the z-axis by an angle φ (sothat the axis x′ is horizontal). Using the spatial rota-tions formulae we express the vector’s τ vertical co-ordinate z′ in the (x′, y′, z′) coordinate axes, whichis obtained from the axes (x′, y′, z) by rotating aboutthe x′ by the angle α.
21. The string connects the two points with theshortest distance along the cylinder’s side; whenunfolded, the cylinder is a rectangle. Consider thevertical plane touching the surface of the cylinderthat includes the hanging portion of the string. Thisplane and the cylinder touch along a straight lines. If you imagine unfolding the cylinder, the anglebetween the string and the straight line s is equalto the cylinder’s inclination angle α. Given this, l iseasy to find. When the weight oscillates, the trace ofthe string still stays straight on the unfolded cylin-der. Therefore the length of the hanging string (andthus the weight’s potential energy) do not dependin any oscillatory state on whether the surface ofthe cylinder is truly cylindrical or is unfolded intoa planar vertical surface (as long as the spatial ori-entation of the axis s is preserved).
22. Write down the two equations describing thebalance of force and torques, and then another onethat describes the linear relation between the elong-ations of the string: T1 − T2 = T2 − T3.
23. Initially only the vertical forces affect thehanging block, therefore the initial displacementvector is also vertical. If the acceleration of the largeblock is a1, that of the block on top of it — a2 andthat of the hanging block — a3, then a1 + a2 = a3
holds. Now we can write down Newton’s 2nd lawfor each body. The fourth and the final unknown isthe tension in the string.
24. Go to the reference frame of the wedge-block. Inthe borderline case, the force of inertia’s and grav-ity’s net force on the ball m is normal to the leftslope (so that the ball stay at rest there). Considerthe net forces acting on the balls. Their compon-ents normal to the surface they rest on are F⊥1 andF⊥2. These are equal to the normal forces N1 and N2
acting on the balls and therefore have to have equalmagnitudes (F⊥1 = F⊥2) to ensure that the force bal-ance is achieved horizontally for the wedge-block.
25. Let’s take the displacement ξ of the wedge ascoordinate describing the system’s position. If thewedge moves by ξ, then the block moves the sameamount with respect to the wedge, because the ropeis unstretchable, and the kinetic energy changes byΠ = mgξ sin α. The velocity of the wedge is ξ andthat of the block is 2ξ sin α
2 (found by adding velocit-ies, where the two vectors ξ are at an angle α), there-fore the net kinetic energy K = 1
2 ξ2(M + 4m sin2 α2 ).
Then we find Π′(ξ) = mg sin α and M = M +
4m sin2 α2 ; their sum gives the answer.
26. Again, let’s take the wedge’s displacement asthe coordinate ξ; if the displacement of the blockalong the surface of the wedge is η, then the centre ofmass being at rest gives η(m1 cos α1 + m2 cos α2) =
(M + m1 + m2)ξ. From here one can extract η asa function of ξ, but to keep the formulae brief it’sbetter not to substitute this expression everywhere.The kinetic energies of the block can be found assums of horizontal [ 1
2 mi(ξ − η cos αi)2] and vertical
[ 12 mi(η sin αi)
2] energies.
27. When writing down energy conservation, notethat the block’s velocity is twice the cylinder’s ve-locity horizontal component and that the latter isequal to the vertical component, too (why?). ProjectNewton’s 2nd law onto the axis that passes through
the top corner of the step and the cylinder’s centre:this axis is perpendicular both to the normal forcebetween the block and the cylinder and to the cylin-der’s tangential acceleration. Second question: theratio of two normal forces is constant (why? whatis it equal to? Hint: compare the horizontal acceler-ations of the cylinder and the block and rememberNewton’s 2nd law), therefore they will be equal tozero at the same instant.
28. By projecting Newton’s 2nd law on the axis inthe direction of the normal force we see that the nor-mal force is the smallest at the bottommost point ofthe trajectory’s arch-shaped part. (There, the centri-petal acceleration is the largest, gravitational force’scomponent along the axis is the smallest).
29. The energy of the "pellet & block" system is al-ways conserved; momentum will only start to beconserved once the pellet passes the bottommostpoint. When it arrives there for the second time, theblock’s velocity is maximal (why?).
30. Let’s apply Idea no. 44 for P: the system’snet momentum is P = ωlm + 2ωlM, net force F =
(m + M)g − T. The same using rotational consid-erations: with respect to the leftmost ball’s initialposition, the angular momentum is l(2ωl)M (velo-city is 2ωl, the velocity’s lever arm — l); net torqueis (T + Mg)l. Now, for the formula given in Ideano. 44 we need the angular acceleration ε = ω.Let’s find it using Method no. 6: Π = lφ(m + 2M),K = 1
2 φ2l2(m + 4M). Another solution route: theratio of accelerations is 1:2; there are four unknowns(two normal forces, acceleration and string tension);equations: three force balances (for either ball andthe rod) and one torque balance (wrt the left end-point of the rod).
31. Method no. 6: for the generalized coordinateξ we can use the displacement of the thread’s end-point. Ideas no. 32,20: the change of the system’sCM y-coordinate is ξρh/M (h — the difference inthe heights of the thread’s endpoints, M — the netmass of the system; assume that ξ ≪ h). For thex-coordinate it’s 2ξρR/M.

32. ⟨T(1 + cos α)⟩ = 2mg, T = ⟨T⟩ + T, where|T| ≪ T. Based on the Idea no. 16 we ignore thetiniest term
⟨Tα2⟩ and note that
⟨α2⟩ > 0.
33. We have to consider two options: either all thebodies move together, or the rightmost large blockmoves separately. Why cannot the situations occurwhere (a) all three components move separately, or(b) the left large block moves separately?
34. After the collision the ball’s trajectories are or-thogonal crossing straight lines; the angle with re-spect to the initial trajectory is determined by howmuch the collision was off-centre.
35. For slightly non-central motion: what will bethe direction of momentum of the ball that was firstto be hit? Now apply the Idea no. 50 again. Cent-ral motion: express the velocities after the collisionvia the horizontal component of the momentum px
that has been transferred to one of the balls. What isthe transferred vertical component py? Energy con-servation provides us an equation to find py (it isconvenient to express the energy as p2/2m).
36. The graph looks like n intersecting straight lines;the intersection point of a pair of straight lines cor-responds to a collision of two balls (the graph ofeither ball’s motion is a jagged line; at a collisionpoint the angles of the two jagged lines touch oneanother so that it looks as if the two straight linesintersect).
37. Initial velocities in the centre of mass: mvm+M ,
Mvm+M , final velocities are zero; friction does work:µmgL.
38. Based on the figure we immediately obtain(to within a multiplicative constant) the magnitudesand directions of the momenta, but not which mo-mentum is which ball’s. It is necessary to find outwhere the ball marked with an arrow will proceedafter the collision. Fact no. 13 will help choose fromthe three options.
39. Energy: in time dt the distribution of the liquidwill change: there is still some water at the centre,but a certain mass dm has been displaced from aboveto the level of the tap (and then through the tap),so the change in the system’s potential energy is
gH · dm. Momentum: the water in the barrel obtainsthe total momentum ρgHS · dt from the walls. Thismomentum is passed on to the stream of water withthe mass ρSv · dt.
40. Energy is not conserved: the grains of sandslip and experience friction. In time dt the sandlanding on the conveyor belt receives momentumdp = v · dm = vµ · dt from the belt: the force betweenthe freshly fallen sand and the belt is F1 = dp/dt.The sand already lying on the belt experiences thegravitational force mg which is compensated by thecomponent of the friction parallel to the belt, F2 =
mg cos α, where m = σL is the mass of the sand onthe belt and σv = µ. The minimization has to bedone over v.
41. During the collision ∆p⊥ =√
2gh.
42. Consider a short section of the path along thehill with length dl. In addition to the change in thepotential energy work is done to overcome friction,dAh = µmg tan α · dl. WE find dAh = C · dx, whereC is a constant. Summing over all such little pathincrements dl we find Ah = C∆x.
43. The kinetic energy K = m2 x2 + Mx2, where x
is the displacement along the slanted surface; Π =
(M + m) sin α. Having found the acceleration a wechange into a reference frame (of the cylinder) mov-ing with acceleration a (Ideas no. 6 and 7), where theblock is being displaced along the effective accelera-tion due to gravity — as low as possible.
44. According to the Ideas no. 59 and 60, theangular momentum of the rod before the collisionis L0 = Mlv − 1
3 Ml2ω; after the collision L1 =
Mlv′ − 13 Ml2ω′; L1 = L2. The expression for energy
is K = 12 Mv2 + 1
6 Ml2ω2. The condition for being atthe end: v′ + lω′ = 0 (we consider ω to be positive ifthe rotation is in the direction marked in the figure).
45. The angular momentum with respect to theimpact point before the collision: mv(x − l
2 )− I0ω,where v = ω l
2 and I0 = 112 ml2.
46. The instantaneous rotation axis passes the con-tact point of the cylinder and the floor; its distancefrom the centre of mass does not change, so we canuse Idea no. 63; I = 3
2 mR2.
47. Let us direct the z axis upward (this will fix thesigns of the angular momenta). The final moment ofinertia with respect to the x-axis is − 7
5 mvyR − muRand with respect to the y-axis is 7
5 mvxR.
48. Immediately after the first collision the centresof masses of both dumbbells are at rest, the velocit-ies of the colliding balls reverse direction, the non-colliding balls’ velocities don’t change. Both dumb-bells act like pendula and complete half an oscilla-tion period, after which the second collision occurs– analogous to the first one.
49. The grains of sand perform harmonic oscilla-tions in the plane perpendicular to the cylinder’saxis — like a mathematical pendulum of length l =R in the gravitational field g cos α; along the axisthere is uniform acceleration (a = g sin α). Focussingoccurs if the time to cross the trough along its axis isan integer multiple of the oscillation’s half-period.
50. Observing the equilibrium position we con-clude that the centre of mass lies on the symmetryaxis of the hanger. The three suspension points mustbe located on the two concentric circles mentionedby Idea no. 67. Therefore one of the circles mustaccommodate at least two points out of the three,while the circles’ centre (the hanger’s centre of mass)must lie inside the region bounded by the hanger’swires on its symmetry axis. There is only one pair ofcircles that satisfies all these conditions. Computingthe radii l1 and l2 of the circles using trigonometrywe determine the reduced length of the penduluml1 + l2 and, using that, the oscillation period.
51. The effective mass of the moving water can befound using the acceleration of the falling ball. Forthe rising bubble the effective mass is exactly thesame, the mass of the gas, compared to that, is neg-ligibly small.
52. The water stream could be mentally dividedinto two parts: the leftmost stream will turn to theleft upon touching the trough, the rightmost — tothe right. Thus, two imaginary ’water tubes’ form.In either tube the static pressure is equal to the ex-ternal pressure (since there is the liquid’s outer sur-face in the vicinity): according to Bernoulli’s law, thevelocity of the liquid cannot change. Based on the
conservation of momentum horizontally, the mo-mentum flows of the left- and right-flowing streamshave to add up to the original stream’s momentumflow’s horizontal component. Note that due to con-tinuity, µ = µv + µp.
53. Due to continuity (u + v)(H + h) = Hu Const,where h = h(x) is the height of the water at pointx and v = v(x) is the velocity. We can write downBernoulli’s law for an imaginary ’tube’ near the sur-face (the region between the free surface and thestream lines not far from the surface): 1
2 ρ(u + v)2 +
ρg(H + h) = 12 ρu2 + ρgH = Const. We can ig-
nore that small second order terms (which includethe factors v2 or vh)
54. The phase trajectory is a horizontal rectanglewith sides L and 2mv, where L is the distance fromthe block to the wall; the adiabatic invariant is thus4Lmv.
55. Consider the balance of torques. For the netforce vectors of the normal and frictional forces,when you extend them, their crossing point must beabove the centre of mass.
56. Let’s write down Newton’s 2nd law for rota-tional motion with respect to the crossing point ofthe normal forces: the angular momentum of thebug is L = mvl sin α cos α, the speed of change of thisangular momentum will be equal to the torque dueto gravity acting on the bug (the other forces’ leverarms are zero). When computing the period, notethat the acceleration is negative and proportional tothe distance from the bottom endpoint, i.e. we aredealing with harmonic oscillations.
57. The blocking occurs if the net force of normaland frictional forces pulls the rod downwards.
58. Once the blocking occurs we can ignore allthe forces apart from normal and frictional ones.Suppose it has occurred. Then the net frictionaland normal forces acting from the left and fromthe right have to balance each other both as forcesand torques, i.e. lie on the same straight line andhave equal magnitudes. Thus we obtain the anglebetween the surface normal and the net force of fric-tion and normal force.
59. Consider the direction of the torque acting onthe plank with respect to the point of contact, whenthe plank has turned by an angle φ: the contact pointshifts by Rφ, the horizontal coordinate of the centreof mass shifts by the distance h
2 φ from the originalposition of the contact point.
60. The only force from the surface on the sys-tem vessel & water is equal to the hydrostatic pres-sure ρghπR2; it balances the gravitational force (m+
ρV)g. Note that H = R − h.
61. The gravitational potential of the centrifugalforce is 1
2 ω2r2, where r is the distance from the ro-tation axis.
62. Assume the reference frame of the large block(which moves with acceleration a). Where does theeffective gravity (the net force of the gravity and theforce of inertia) have to be directed? What is a?With which acceleration does the little block fall inthis reference frame? What is the tension T of thethread? Having answers to these questions we canwrite down the equilibrium condition for the largeblock ma = T(1 − sin α).
63. Let us use the displacement of the sphere (downthe inclined surface) as the generalized coordinate ξ.What is the displacement of the sphere (up the otherinclined surface)? Evidently Π = (m − M)gξ sin α.The normal force between the two bodies can befound by projecting Newton’s second law onto theinclined surface’s direction.
64. Let the displacement of the large cylinder be ξ,the horizontal displacement of the middle and theleftmost cylinder, respectively, x and y. What is therelationship between them given that the centre ofmass is at rest? What is the relationship betweenthem given that the length of the rods does notchange? From the two equations thus obtained wecan express x and y via ξ. If we assume the displace-ment to be tiny, what is the relationship between thevertical displacement z of the middle cylinder andthe horizontal projection of the rod’s length, ξ − x?Knowing these results, applying Method no. 6 isstraightforward.
65. Where is the small displacement ξ of the spheredirected (see Idea no. 30)? What is the displacementof the ring expressed via ξ? Use Method no. 6.
66. Use Idea no. 38 along with energy conserva-tion by projecting the force and the acceleration inthe Newton’s 2nd law radially.
67. Let us use some ideas from kinematics to findthe acceleration of the sphere (K1, K29 and K2: bychanging into the reference frame moving with ve-locity v we find the component of the sphere’s accel-eration along the rod and by noticing that the hori-zontal acceleration of the sphere is zero, we obtain,using trigonometry, the magnitude of the accelera-tion). Now use Newton’s 2nd law.
68. Using the velocity v of the sphere we can ex-press the velocity of the block at the moment beinginvestigated (bearing in mind that their horizontalvelocities are equal). Using Idea no. 38 we find thatthe block’s (and thus the sphere’s) horizontal accel-eration is zero; by using Newton’s 2nd law for thesphere and the horizontal direction we conclude thatthe tension in the rod is also zero. From the energyconservation law we express v2 and from Newton’s2nd law for the sphere and the axis directed alongthe rod we obtain an equation wherein hides thesolution.
69. Using Newton’s 2nd law investigate whither thesystem’s centre of mass will move — to the left or tothe right (if the centre of mass had not move, thenthe both events would have happened at the sametime).
70. To answer the first part: show that the force per-pendicular to velocity is zero (use Method no. 3 andIdea no. 26). To answer the second part use Methodno. 3 and idea 54.
71. Due to the length of the thread there are no ho-rizontal forces, i.e. the horizontal component of mo-mentum is conserved, and so is the energy. Fromthe two corresponding equation the limiting velo-city v = v0 can be found, for which the bottomsphere ascends exactly to the height of the top one.Note that at that point its vertical velocity is zero, cf.Idea no. 42.
72. Use Idea no. 49. Options: all block keep to-gether; everything slides; the top one slides and andthe bottom two stay together (why is it not possiblethat the top two keep together and the bottom oneslides?).
73. Which conservation law acts when the two boyscollide (during a limited time of collision) — do weconsider the collision absolutely elastic or inelastic(can momentum be lost and where? If it is inelastic,where does the energy go?), see Idea no. 56? Afterthe collision: the common acceleration of the twoboys is constant, knowing the initial and final velo-cities finding the distance becomes an easy kinemat-ics problem.
74. Prove that for a vertical thread the velocity ismaximal (by applying Idea no. 42 for the rotationangle of the rod show that its angular velocity is zeroin that position; use Idea no. 59). Then it only re-mains to apply energy conservation (remember thatω = 0).
75. Find the instantaneous rotation axis (make surethat its distance from the centre of mass is 1
2 ). Provethat the centre of mass moves along a circle centredat the corned of the wall and the floor, whereas thepolar coordinate of the centre of mass on that circleis the same as the angle φ between the wall and thestick. Express the kinetic energy as a function ofthe derivative φ of the generalized coordinate φ us-ing the parallel-axis (Steiner’s) theorem and expressthe energy conservation law as ω2 = f (φ); usingMethod no. 6 we obtain ε = ω = 1
2 f ′(φ). Whenthe normal force against the wall reaches zero, theacceleration of the centre of mass is vertical: presentthis condition using the tangential and radial accel-erations of the centre of mass on its circular orbit ( l
2 ε
and l2 ω2 respectively) and use it as an equation to
find φ.
76. Based on Idea no. 62 we find that ω = 6v/l. Us-ing energy and momentum conservation we elimin-ate the puck’s velocity after the collision and expressthe mass ratio.
77. The forces along the normal to the surface areelastic forces, so the energy in vertical direction isconserved during the collision: after the collision
the corresponding velocity component is the sameas before. To find the other two unknowns, the ho-rizontal and angular velocities, we can obtain oneequation using Idea no. 62. The second equationarises from (a) the condition that the velocity of theball’s surface is zero at the contact point (no sliding;(b) the equation arising from 58).
78. Using the idea 49 we investigate the sliding androlling regimes. In the latter case the quickest wayto find the answer is to use Idea no. 63.
79. The velocity can be found from the conservationlaws for energy and momentum (note that the hoopis moving translationally). To find the acceleration itis convenient to use the non-inertial reference frameof the hoop, where the centripetal acceleration of theblock is easily found. The condition for the radialbalance of the block gives the normal force betweenthe block and the hoop (don’t forget the force of in-ertia!); the horizontal balance condition for the hoopprovides an equation for finding the acceleration.
80. Let us assume the block’s velocity to be ap-proximately constant. For a certain time tl the baseslides to the left with respect to the block and themomentum imparted by the frictional force at thattime is also directed to the left. During the remain-ing time tr the base slides to the right with respect-ive momentum directed to the right as well. Theequilibrium condition is that the two momenta haveequal magnitudes; hence we ding the equilibriumvalue of tl/tr . From the graph we find the velocityfor which that ratio has the needed value.
81. As the water flows against the paddles it ob-tain the same vertical velocity u as the paddles them-selves. This allows to compute the momentum im-parted to the paddle per unit time (i.e. the force),which ends up being proportional to the difference:F ∝ v − u. From there, it is not very hard to find themaximum of the power Fu.
82. In the reference frame of the board the problemis equivalent to the problem no. 52.
83. Go into the (accelerated) reference frame of thewagon, where the effective gravity
√a2 + g2 is at a
small angle with respect to the vertical. The load willoscillate yet remain motionless at the end if the cable

is vertical at the stopping moment and the load’s ve-locity is zero. It is possible when the correspondingposition is the maximal deviation during the oscil-lation. Therefore the oscillation amplitude has to bethe same both during the acceleration and decelera-tion, so that even when the deceleration begins thecable has to be vertical. In that case, how are the ac-celeration time and the oscillation period related?
84. If the shockwave is at the point where the in-tersection area of its wavefront and the consideredbody is S, then what is the force acting on the body?Let us assume that the body stays (almost) at thesame place as the shockwave passes it. Then the mo-mentum imparted during the time dt can be foundusing the cross-sectional area S and the distancedx = cs · dt covered by the wavefront. Note thatS · dx is the volume element. Finally we sum overall imparted momenta.
85. The rod will act like a spring (since the rod isthin and made out of steel, while steel is elastic).After the left sphere has collided with the station-ary sphere, the latter will acquire velocity v0 andthe former will stay at rest. Then the dumbbell, asa system of spheres and springs, will begin oscillat-ing around its centre of mass. What is the velocity ofthe centre of mass? Convince yourself that after halfa period the single sphere is already far enough thatthe left sphere is not going to collide with it again.The oscillations of the dumbbell will decay little bylittle — so some energy will be lost there.
ANSWERS
1. arcsin Rµ
(R+l)√
µ2+1.
2. arcsin mM+m
µ√µ2+1
.
3. mg/2.
4. a) µmg/√
1 + µ2; b) mg sin(arctan µ −α).
5. µ ≥ |g sin α−a cos α|g cos α+a sin α , if g + a tan α > 0.
6. a) ω2R ≥ g√
1 + µ−2;b) ω2R ≥ g
√1 + µ−2, if µ < cot α and
ω2R ≥ g(cos α + µ−1 sin α) if µ > cot α
7. v/2.
8. tan 2α = h/a9. µ1 ≥
√l2 − h2/h
10. 3mg11. 2 arctan[(1 + m
M ) cot α]
12.√
2HLµ + µ2H2 − µH ≈√
2HLµ −µH ≈ 7,2 m.
13. a) ω2 < g/l ; b) (2 −√
2)g/l
14. 12 (1 − 3−1/2)ρv ≈ 211 kg/m3
15. π3 ρR3
16. v/√
µ2 cot2 α − 1
17. 43 πGr3∆ρ/g(r + h) ≈ 0,95 cm
18. −ω
19. µmgv/ωR20. cos φ tan α < tan 30◦
21. L − πR/2 cos α; 2π√
L/g
22. 112 mg, 1
3 mg, 712 mg
23. mg/(2M + m)
24. m < M cos 2α.
25. mg sin α/[M + 2m(1 − cos α)] =mg sin α/[M + 4m sin2 α
2 ].
26. g (m1 sin α1−m2 sin α2)(m1 cos α1+m2 cos α2)(m1+m2+M)(m1+m2)−(m1 cos α1+m2 cos α2)2 .
27. mg(5√
2 − 4)/6); Simultaneously.
28. cos α ≥ 13 (2 + v2/gR)
29. 2 mM+m
√2gR
30. mMg/(m + 4M)
31. Fx = 2Raρ, Fy = ρ(m + ρL)g −(L − πR − 2l)a, where a = ρg(L − πR −2l)/(m + ρL).32. The one that had not been pushed.
33. If F ≤ 2µmg m+M2m+M : a1 = a2 = 1
2F
M+m ;otherwise a1 = F
M − µg mM , a2 = µg m
2m+M .
34. On a half-circle.
35. (a) v/5; (b) v/4.
36. n(n − 1)/2
37.√
2µgL(1 + mM )
38. 3,5; was coming from below right.
39. A:√
2gh ;√
gh.
40. 2Rµ√
gl sin α,√
gl sin α.
41. u − µ√
2gh.
42. mg(h + µa).
43. arctan 25 ≈ 21◦48′.
44. (a) (ωl + 3v)/4; (b) (ωl + v)/2.
45. At a distance 2l/3 from the holdinghand, where l is the length of the bat.
46. 23
FM
aR
47. (vx0, vy0 − 57 u)
48. L/v0 + π√
m/2k49. 1
2 π2(n + 12 )
2R tan α
50. 1,03 s
51. 2,0 g
52. v1 = v2 = v; cot2 α2
53.√
gH.
54. 5 m/s.
55. (a) tan ≤ 2µ ; (a) impossible.
56. g(1 − xl ) sin−1 α; π
2
√l sin α/g
57. µ < cot α.
58. µ1 < tan α2 and µ2 < tan α
2 .
59. R > h/2
60. 3√
3m/πρ
61. ω2R2/2g62. M/m = cot α − 1.
63. 2mMM+m g tan α
64. g/9.
65. g m+Mm+M sin2 α
sin2 α.
66. 2/3R
67. m[g − v2(2l − x)/√
2l2]
68. M/m = 4, u =√
gl/8.
69. The first one arrives first
70. A straight line; if ω = 0
71.√
2gl(1 + m/M)
72. F3m , if F
mµg < 6; F4m + 1
2 µg, if
6 < Fmµg < 10; 3µg, if F
mµg > 10
73. m2v2/2(M2 − m2)µg
74.√(l − H
2 )g
75. arccos 23 ≈ 48◦12′
76. M/m = 4.
77. (a) ω = 5v0/7R, vx = 5v0/7, vy =√2gh;
(b) vy =√
2gh, vx = v0 − 2µvy,ω = 5
√2ghµ/R.
78. 57 g sin α, if µ > 2
7 tan α, otherwiseg sin α − µg cos α
79.√
2grm+M
1+cos φ
m sin2 φ+Mm cos φ;
gm sin 2φ
m sin2 φ+M[ 1
2 + m2 cos φ(1+cos φ)
(m sin2 φ+M)(m+M)]
80. 0,6 m/s
81. 14 µv2
82. v/ cos α
83. n−2Lg/4π2l, n = 1, 2, . . .
84. (a),(b) (p1 − p0)V/mcs.
85. 12 v0; no, a fraction goes into the longit-
udinal oscillations of the rod and then (asthe oscillations die) into heat