Probabilistic Robotics
61
Probabilistic Robotics Bayes Filter Implementations Gaussian filters
-
Upload
macon-guerrero -
Category
Documents
-
view
10 -
download
0
description
Probabilistic Robotics. Bayes Filter Implementations Gaussian filters. Bayes Filter Reminder. Prediction Correction. m. Univariate. - s. s. m. Multivariate. Gaussians. Properties of Gaussians. Multivariate Gaussians. - PowerPoint PPT Presentation
Transcript of Probabilistic Robotics

Probabilistic Robotics
Bayes Filter Implementations
Gaussian filters

•Prediction
•Correction
Bayes Filter Reminder
111 )(),|()( tttttt dxxbelxuxpxbel
)()|()( tttt xbelxzpxbel

Gaussians
2
2)(
2
1
2
2
1)(
:),(~)(
x
exp
Nxp
-
Univariate
)()(2
1
2/12/
1
)2(
1)(
:)(~)(
μxΣμx
Σx
Σμx
t
ep
,Νp
d
Multivariate

),(~),(~ 22
2
abaNYbaXY
NX
Properties of Gaussians
22
21
222
21
21
122
21
22
212222
2111 1
,~)()(),(~
),(~
NXpXpNX
NX

• We stay in the “Gaussian world” as long as we start with Gaussians and perform only linear transformations.
),(~),(~ TAABANY
BAXY
NX
Multivariate Gaussians
12
11
221
11
21
221
222
111 1,~)()(
),(~
),(~
NXpXpNX
NX

6
Discrete Kalman Filter
tttttt uBxAx 1
tttt xCz
Estimates the state x of a discrete-time controlled process that is governed by the linear stochastic difference equation
with a measurement

7
Components of a Kalman Filter
t
Matrix (nxn) that describes how the state evolves from t to t-1 without controls or noise.
tA
Matrix (nxl) that describes how the control ut changes the state from t to t-1.tB
Matrix (kxn) that describes how to map the state xt to an observation zt.tC
t
Random variables representing the process and measurement noise that are assumed to be independent and normally distributed with covariance Rt and Qt respectively.

8
Kalman Filter Updates in 1D

9
Kalman Filter Updates in 1D
1)(with )(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 with )1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel

10
Kalman Filter Updates in 1D
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel

11
Kalman Filter Updates

12
0000 ,;)( xNxbel
Linear Gaussian Systems: Initialization
• Initial belief is normally distributed:

13
• Dynamics are linear function of state and control plus additive noise:
tttttt uBxAx 1
Linear Gaussian Systems: Dynamics
ttttttttt RuBxAxNxuxp ,;),|( 11
1111
111
,;~,;~
)(),|()(
ttttttttt
tttttt
xNRuBxAxN
dxxbelxuxpxbel

14
Linear Gaussian Systems: Dynamics
tTtttt
tttttt
ttttT
tt
ttttttT
tttttt
ttttttttt
tttttt
RAA
uBAxbel
dxxx
uBxAxRuBxAxxbel
xNRuBxAxN
dxxbelxuxpxbel
1
1
1111111
11
1
1111
111
)(
)()(2
1exp
)()(2
1exp)(
,;~,;~
)(),|()(

15
• Observations are linear function of state plus additive noise:
tttt xCz
Linear Gaussian Systems: Observations
tttttt QxCzNxzp ,;)|(
ttttttt
tttt
xNQxCzN
xbelxzpxbel
,;~,;~
)()|()(

16
Linear Gaussian Systems: Observations
1
11
)(with )(
)()(
)()(2
1exp)()(
2
1exp)(
,;~,;~
)()|()(
tTttt
Tttt
tttt
ttttttt
tttT
ttttttT
tttt
ttttttt
tttt
QCCCKCKI
CzKxbel
xxxCzQxCzxbel
xNQxCzN
xbelxzpxbel

17
Kalman Filter Algorithm
1. Algorithm Kalman_filter( t-1, t-1, ut, zt):
2. Prediction:3. 4.
5. Correction:6. 7. 8.
9. Return t, t
ttttt uBA 1
tTtttt RAA 1
1)( tTttt
Tttt QCCCK
)( tttttt CzK
tttt CKI )(

18
The Prediction-Correction-Cycle
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel
Prediction

19
The Prediction-Correction-Cycle
1)(,)(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 ,)1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel
Correction

20
The Prediction-Correction-Cycle
1)(,)(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 ,)1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel
Correction
Prediction

21
Kalman Filter Summary
•Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k2.376 + n2)
•Optimal for linear Gaussian systems!
•Most robotics systems are nonlinear!

22
Nonlinear Dynamic Systems
•Most realistic robotic problems involve nonlinear functions
),( 1 ttt xugx
)( tt xhz

23
Linearity Assumption Revisited

24
Non-linear Function

25
EKF Linearization (1)

26
EKF Linearization (2)

27
EKF Linearization (3)

28
•Prediction:
•Correction:
EKF Linearization: First Order Taylor Series Expansion
)(),(),(
)(),(
),(),(
1111
111
111
ttttttt
ttt
tttttt
xGugxug
xx
ugugxug
)()()(
)()(
)()(
ttttt
ttt
ttt
xHhxh
xx
hhxh

29
EKF Algorithm
1. Extended_Kalman_filter( t-1, t-1, ut, zt):
2. Prediction:3. 4.
5. Correction:6. 7. 8.
9. Return t, t
),( 1 ttt ug
tTtttt RGG 1
1)( tTttt
Tttt QHHHK
))(( ttttt hzK
tttt HKI )(
1
1),(
t
ttt x
ugG
t
tt x
hH
)(
ttttt uBA 1
tTtttt RAA 1
1)( tTttt
Tttt QCCCK
)( tttttt CzK
tttt CKI )(

30
Localization
• Given • Map of the environment.• Sequence of sensor measurements.
• Wanted• Estimate of the robot’s position.
• Problem classes• Position tracking• Global localization• Kidnapped robot problem (recovery)
“Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities.” [Cox ’91]

31
Landmark-based Localization

32
1. EKF_localization ( t-1, t-1, ut, zt, m):
Prediction:
2.
3.
4.
5.
6.
),( 1 ttt ug Tttt
Ttttt VMVGG 1
,1,1,1
,1,1,1
,1,1,1
1
1
'''
'''
'''
),(
tytxt
tytxt
tytxt
t
ttt
yyy
xxx
x
ugG
tt
tt
tt
t
ttt
v
y
v
y
x
v
x
u
ugV
''
''
''
),( 1
2
43
221
||||0
0||||
tt
ttt
v
vM
Motion noise
Jacobian of g w.r.t location
Predicted mean
Predicted covariance
Jacobian of g w.r.t control

33
1. EKF_localization ( t-1, t-1, ut, zt, m):
Correction:
2.
3.
4.
5.
6.
7.
8.
)ˆ( ttttt zzK
tttt HKI
,
,
,
,
,
,),(
t
t
t
t
yt
t
yt
t
xt
t
xt
t
t
tt
rrr
x
mhH
,,,
2,
2,
,2atanˆ
txtxyty
ytyxtxt
mm
mmz
tTtttt QHHS
1 tTttt SHK
2
2
0
0
r
rtQ
Predicted measurement mean
Pred. measurement covariance
Kalman gain
Updated mean
Updated covariance
Jacobian of h w.r.t location

34
EKF Prediction Step

35
EKF Observation Prediction Step

36
EKF Correction Step

37
Estimation Sequence (1)

38
Estimation Sequence (2)

39
Comparison to GroundTruth
40
EKF Summary
•Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k2.376 + n2)
•Not optimal!•Can diverge if nonlinearities are large!•Works surprisingly well even when all
assumptions are violated!

41
Linearization via Unscented Transform
EKF UKF
42
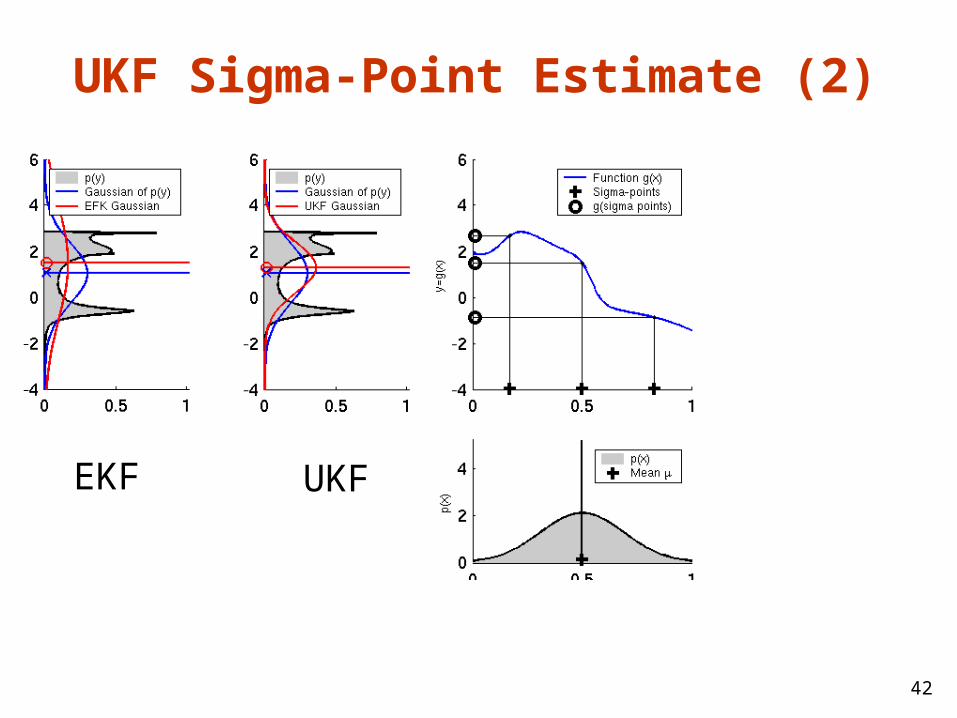
UKF Sigma-Point Estimate (2)
EKF UKF

43
UKF Sigma-Point Estimate (3)
EKF UKF

44
Unscented Transform
nin
wwn
nw
nw
ic
imi
i
cm
2,...,1for )(2
1 )(
)1( 2000
Sigma points Weights
)( ii g
n
i
Tiiic
n
i
iim
w
w
2
0
2
0
))(('
'
Pass sigma points through nonlinear function
Recover mean and covariance

45
UKF_localization ( t-1, t-1, ut, zt, m):
Prediction:
2
43
221
||||0
0||||
tt
ttt
v
vM
2
2
0
0
r
rtQ
TTTt
at 000011
t
t
tat
Q
M
00
00
001
1
at
at
at
at
at
at 111111
xt
utt
xt ug 1,
L
i
T
txtit
xti
ict w
2
0,,
L
i
xti
imt w
2
0,
Motion noise
Measurement noise
Augmented state mean
Augmented covariance
Sigma points
Prediction of sigma points
Predicted mean
Predicted covariance

46
UKF_localization ( t-1, t-1, ut, zt, m):
Correction:
zt
xtt h
L
iti
imt wz
2
0,ˆ
Measurement sigma points
Predicted measurement mean
Pred. measurement covariance
Cross-covariance
Kalman gain
Updated mean
Updated covariance
Ttti
L
itti
ict zzwS ˆˆ ,
2
0,
Ttti
L
it
xti
ic
zxt zw ˆ,
2
0,
,
1, tzx
tt SK
)ˆ( ttttt zzK
Tttttt KSK

47
1. EKF_localization ( t-1, t-1, ut, zt, m):
Correction:
2.
3.
4.
5.
6.
7.
8.
)ˆ( ttttt zzK
tttt HKI
,
,
,
,
,
,),(
t
t
t
t
yt
t
yt
t
xt
t
xt
t
t
tt
rrr
x
mhH
,,,
2,
2,
,2atanˆ
txtxyty
ytyxtxt
mm
mmz
tTtttt QHHS
1 tTttt SHK
2
2
0
0
r
rtQ
Predicted measurement mean
Pred. measurement covariance
Kalman gain
Updated mean
Updated covariance
Jacobian of h w.r.t location

48
UKF Prediction Step

49
UKF Observation Prediction Step

50
UKF Correction Step

51
EKF Correction Step

52
Estimation Sequence
EKF PF UKF

53
Estimation Sequence
EKF UKF

54
Prediction Quality
EKF UKF

55
UKF Summary
•Highly efficient: Same complexity as EKF, with a constant factor slower in typical practical applications
•Better linearization than EKF: Accurate in first two terms of Taylor expansion (EKF only first term)
•Derivative-free: No Jacobians needed
•Still not optimal!

56
• [Arras et al. 98]:
• Laser range-finder and vision
• High precision (<1cm accuracy)
Kalman Filter-based System
[Courtesy of Kai Arras]

57
Multi-hypothesisTracking

58
• Belief is represented by multiple hypotheses
• Each hypothesis is tracked by a Kalman filter
• Additional problems:
• Data association: Which observation
corresponds to which hypothesis?
• Hypothesis management: When to add / delete
hypotheses?
• Huge body of literature on target tracking, motion
correspondence etc.
Localization With MHT

59
• Hypotheses are extracted from LRF scans
• Each hypothesis has probability of being the correct one:
• Hypothesis probability is computed using Bayes’ rule
• Hypotheses with low probability are deleted.
• New candidates are extracted from LRF scans.
MHT: Implemented System (1)
)}(,,ˆ{ iiii HPxH
},{ jjj RzC
)(
)()|()|(
sP
HPHsPsHP ii
i
[Jensfelt et al. ’00]

60
MHT: Implemented System (2)
Courtesy of P. Jensfelt and S. Kristensen

61
MHT: Implemented System (3)Example run
Map and trajectory
# hypotheses
#hypotheses vs. time
P(Hbest)
Courtesy of P. Jensfelt and S. Kristensen