
PRM, RRT, and RRT* - Georgia Institute of...
43
PRM, RRT, and RRT* Frank Dellaert Based on materials by Steve Lavalle, Lydia Kavraki, Emilio Frazzoli and their students Monday, February 21, 2011
Transcript of PRM, RRT, and RRT* - Georgia Institute of...
PRM, RRT, and RRT*Frank Dellaert
Based on materials by Steve Lavalle, Lydia Kavraki, Emilio Frazzoli and their students
Monday, February 21, 2011
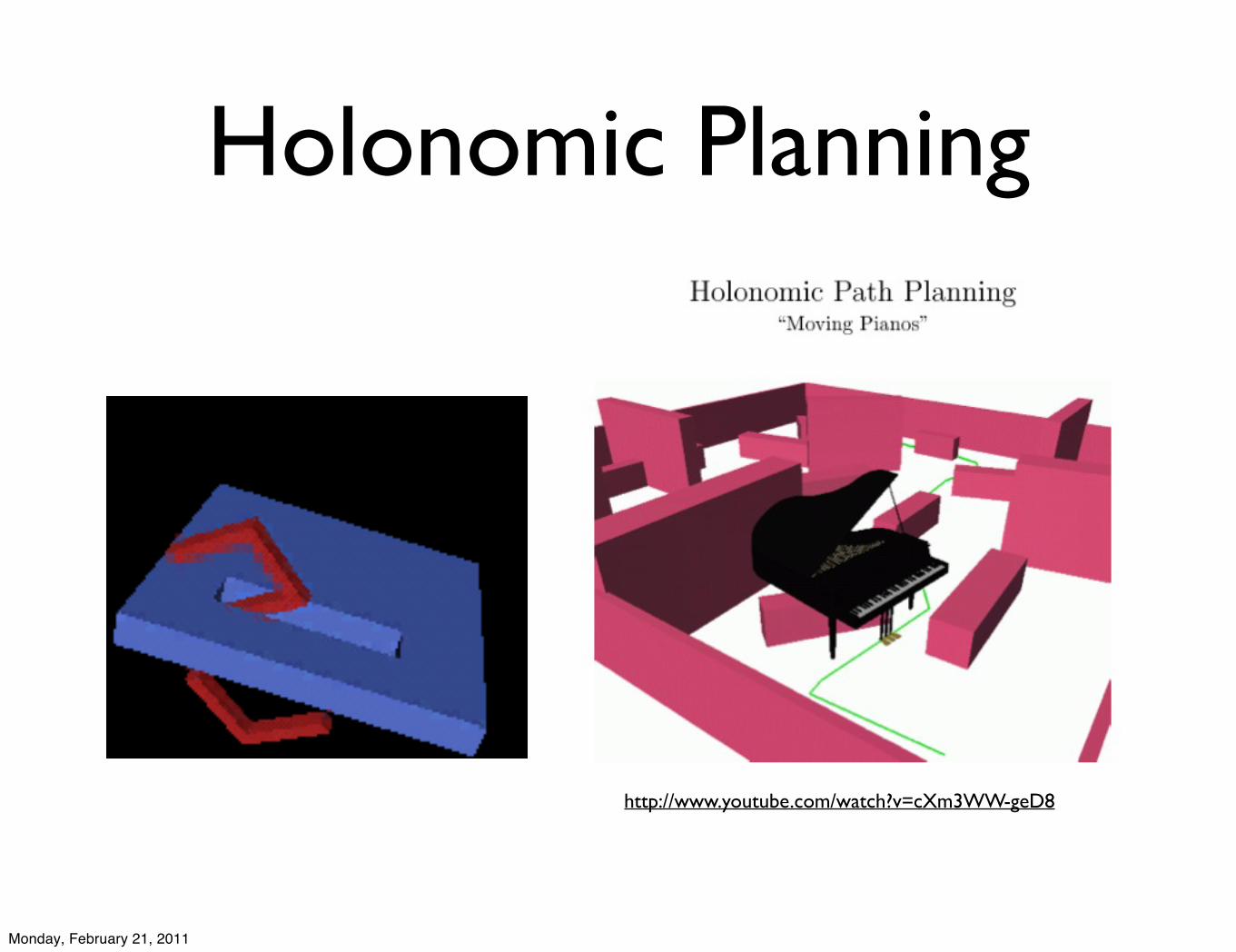
Holonomic Planning
http://www.youtube.com/watch?v=cXm3WW-geD8
Monday, February 21, 2011
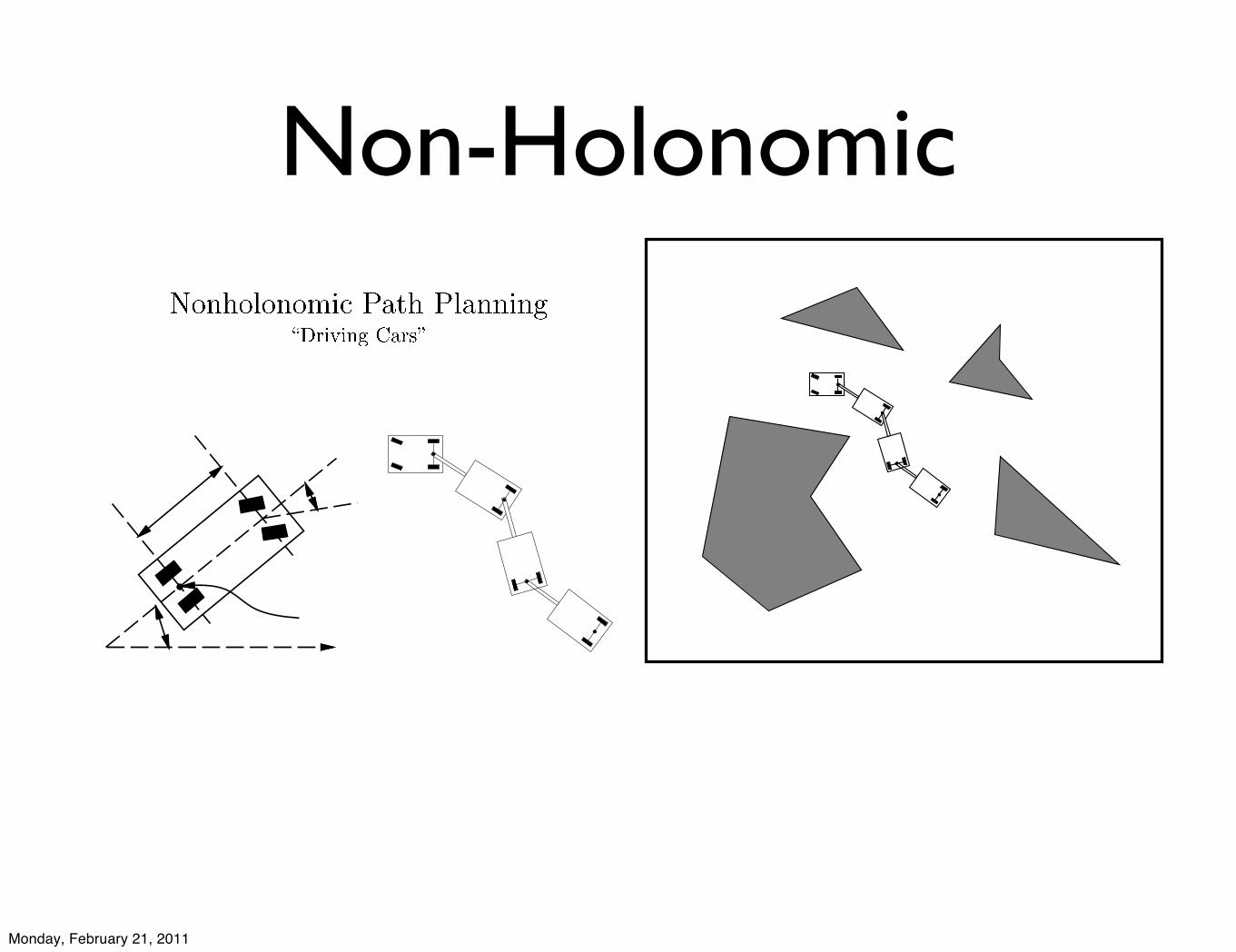
Non-Holonomic
Monday, February 21, 2011
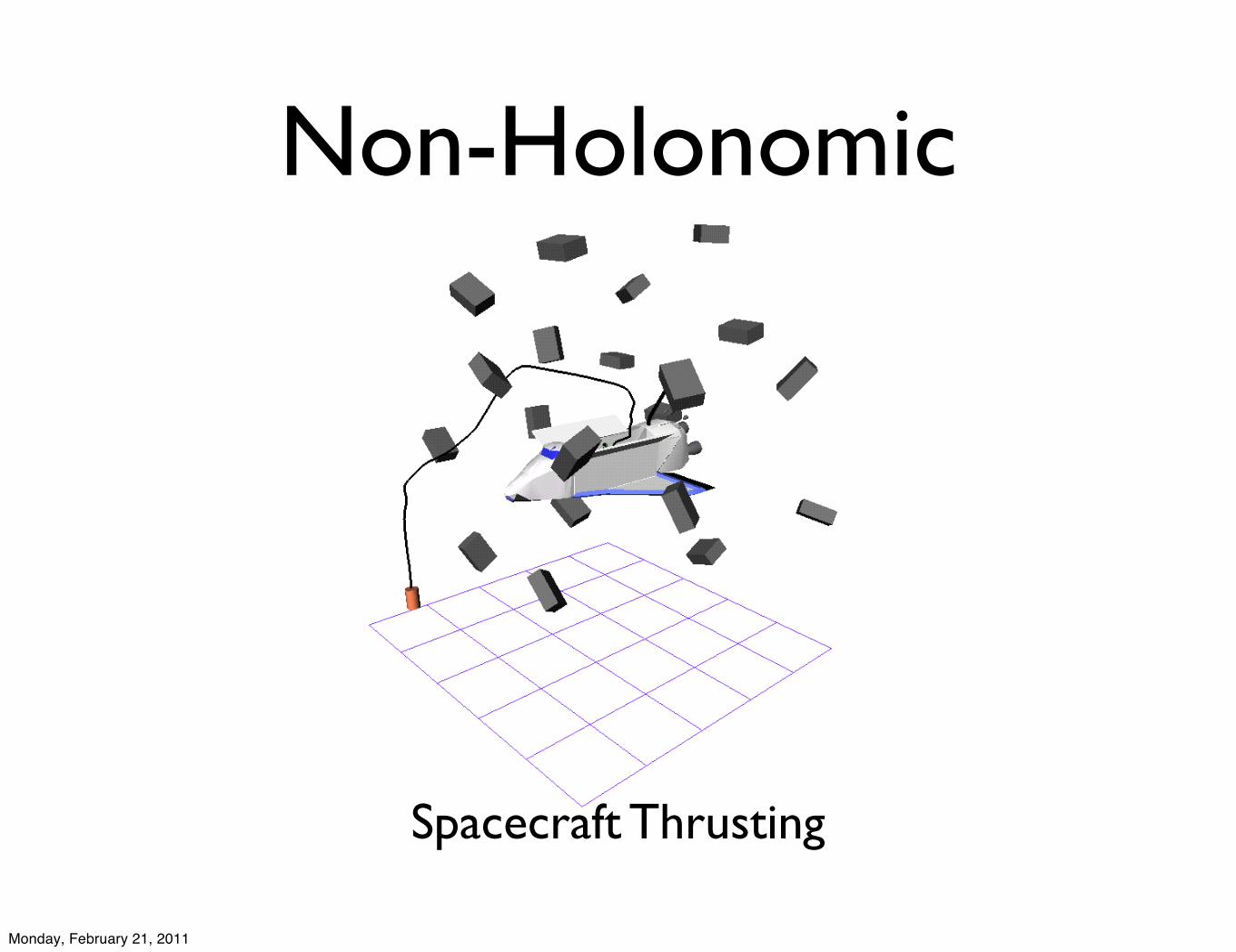
Non-Holonomic
Spacecraft Thrusting
Monday, February 21, 2011
PRMRRTRRT*
Monday, February 21, 2011
PRMRRTRRT*
Monday, February 21, 2011
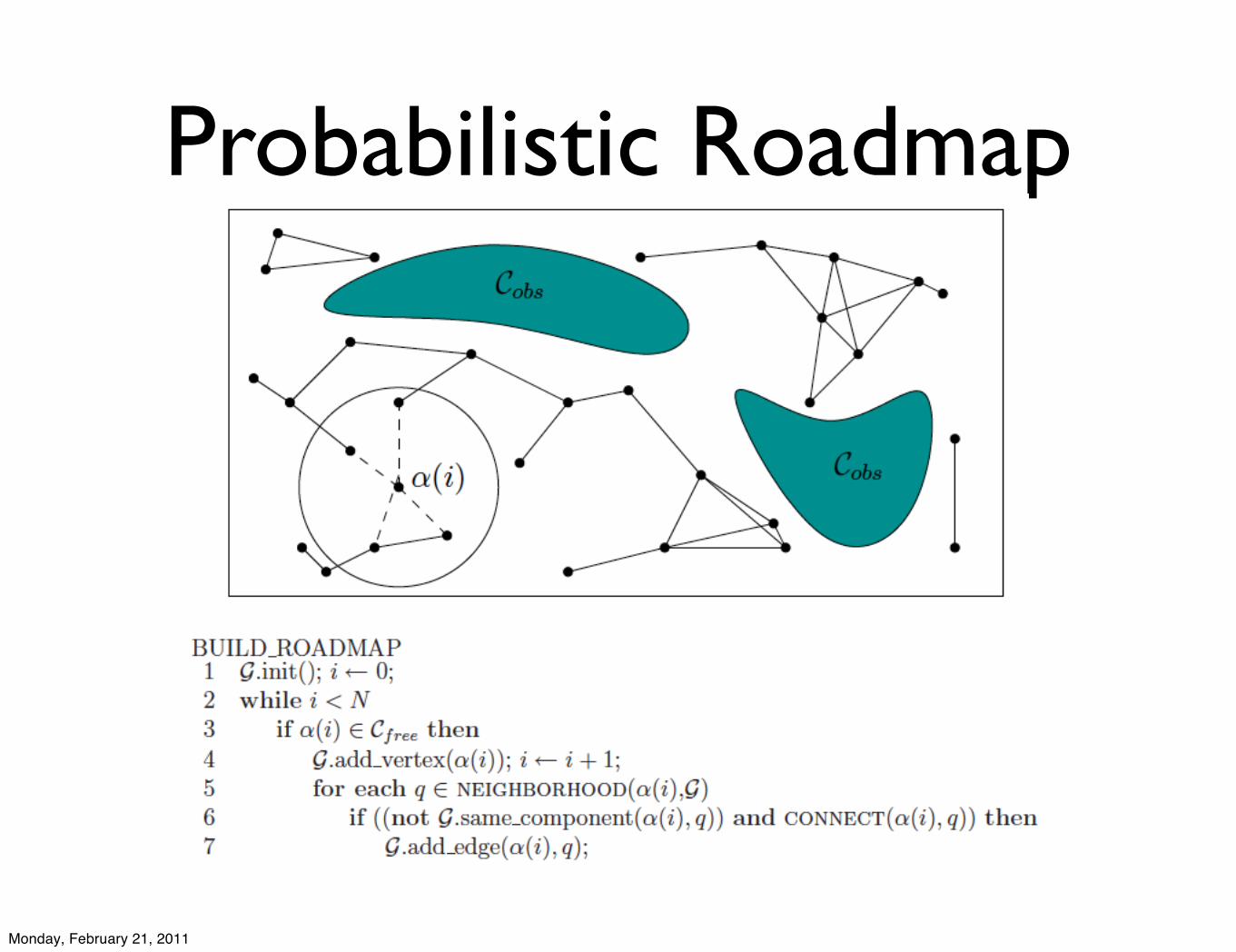
Probabilistic Roadmap
Monday, February 21, 2011

Probabilistic Roadmap
Demo!
Monday, February 21, 2011

PRM Properties
• Good
• Multiple Queries
• Probabilistically Complete
• Bad:
• Determining connectivity can be hard
• Especially in non-holonomic planning
Monday, February 21, 2011
PRMRRTRRT*
Monday, February 21, 2011

Problem Formulation
Monday, February 21, 2011
RRT
Monday, February 21, 2011
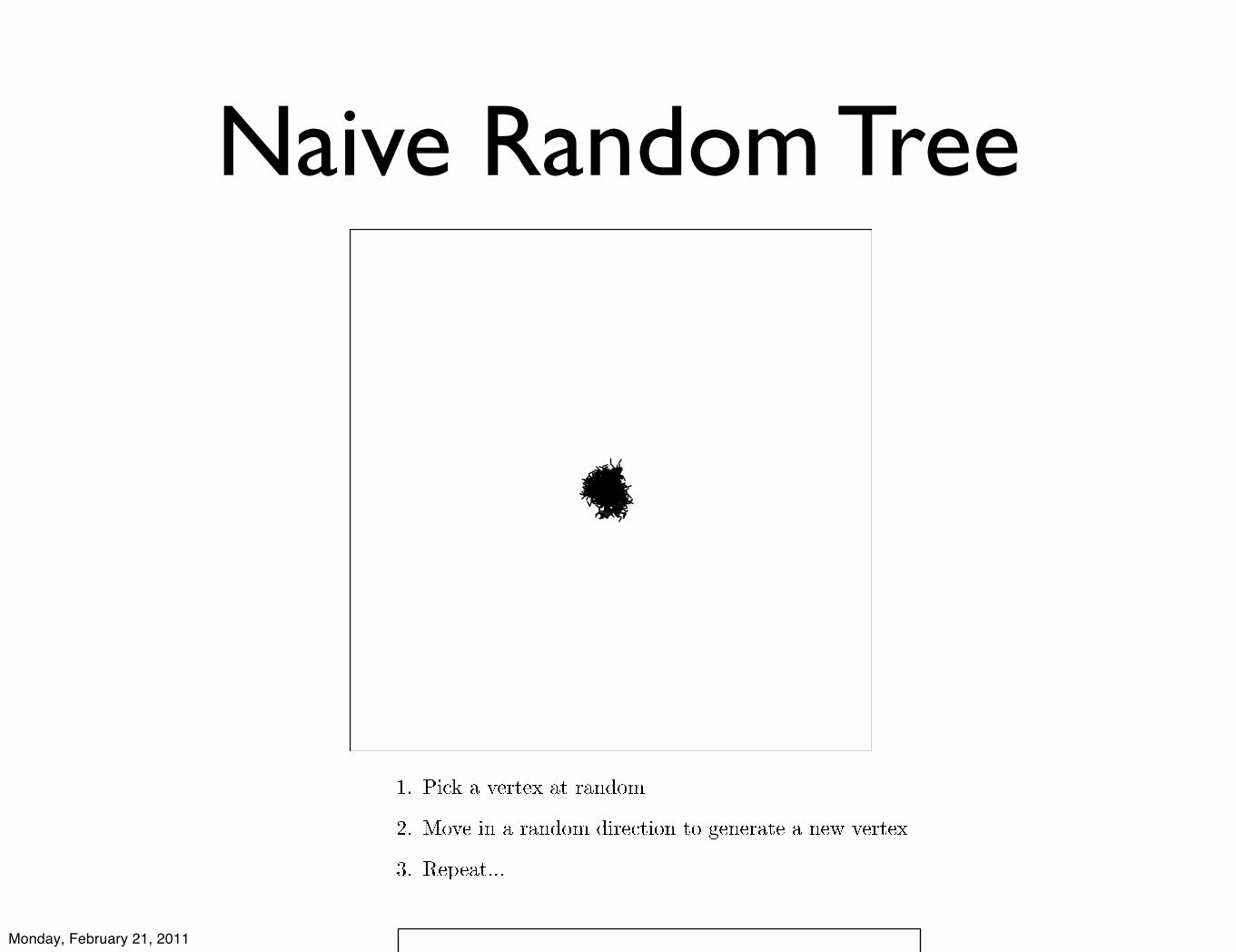
Naive Random Tree
Monday, February 21, 2011

Algorithm
Monday, February 21, 2011

Convex Region
Monday, February 21, 2011
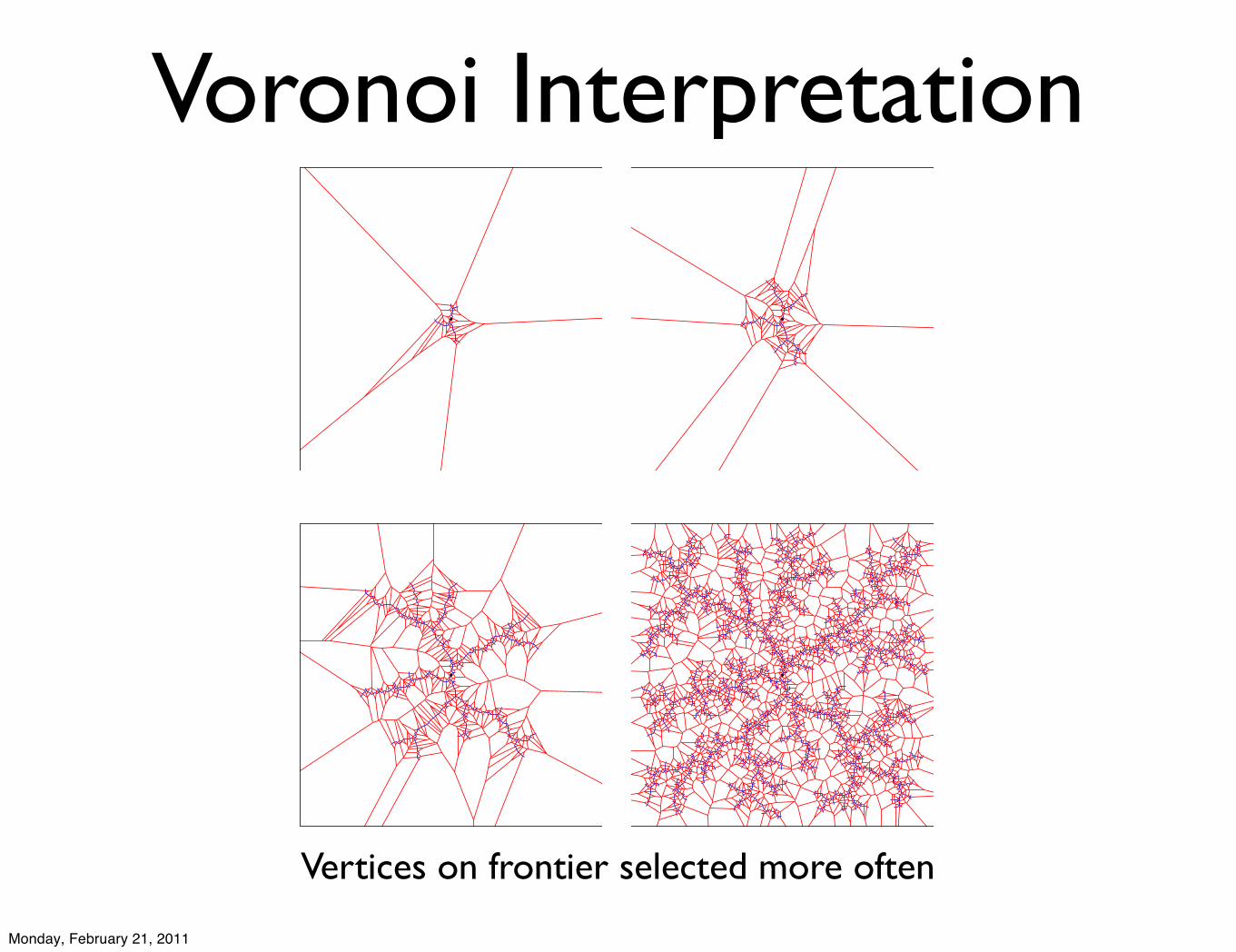
Voronoi Interpretation
Vertices on frontier selected more often
Monday, February 21, 2011
RRT Advantages
Monday, February 21, 2011

RRT in Planning
Monday, February 21, 2011

Hovercraft
Monday, February 21, 2011

Free Satellite in 3D
Monday, February 21, 2011
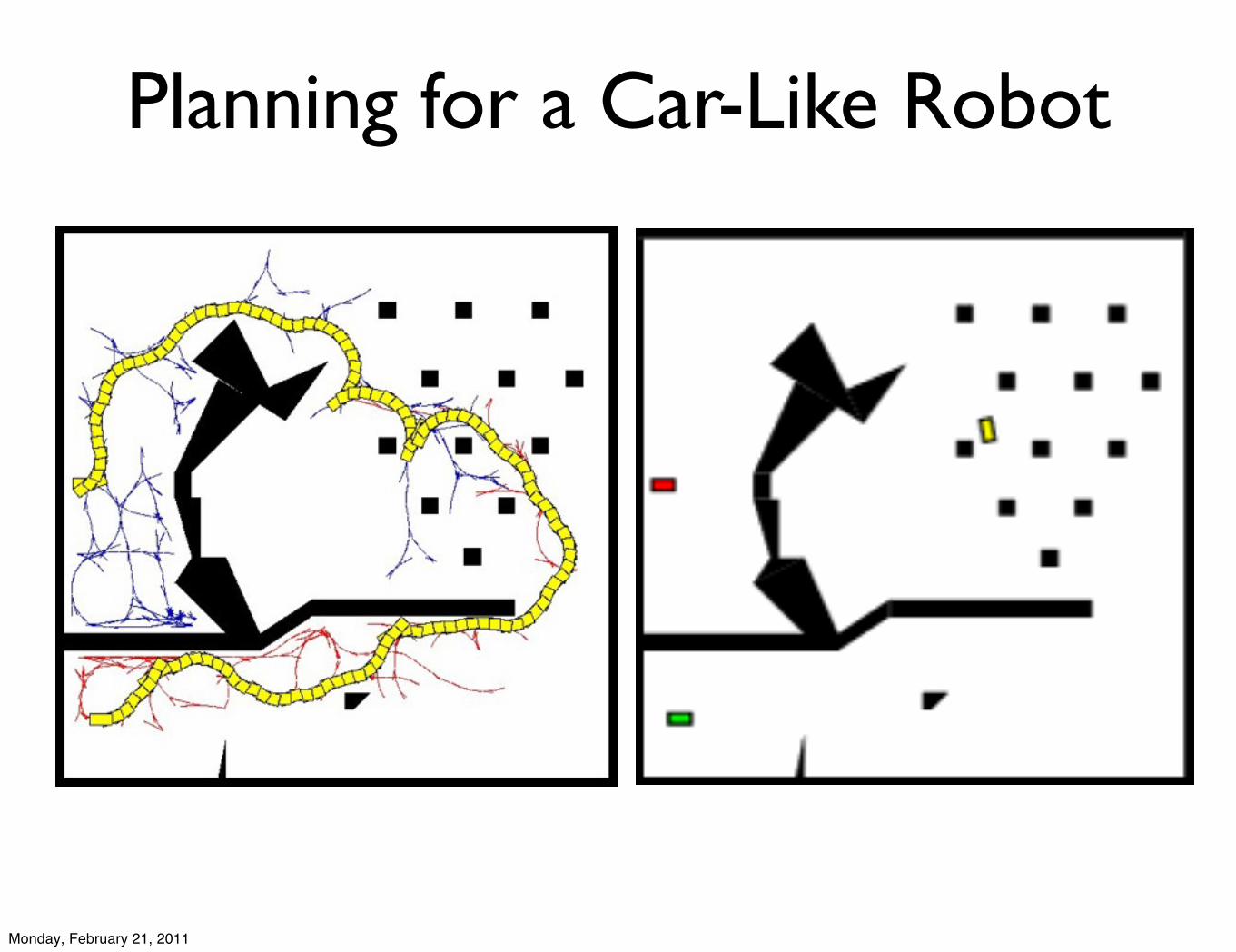
Planning for a Car-Like Robot
Monday, February 21, 2011

PRMRRTRRT*
Monday, February 21, 2011
Problems with RRT
• Solution far from optimal
• Karaman & Frazzoli 2010: Probability of RRT converging to an optimal solution is 0
• Rapidly-exploring Random Graph (RRG): 1
• Downside: back to finding connections!
Monday, February 21, 2011

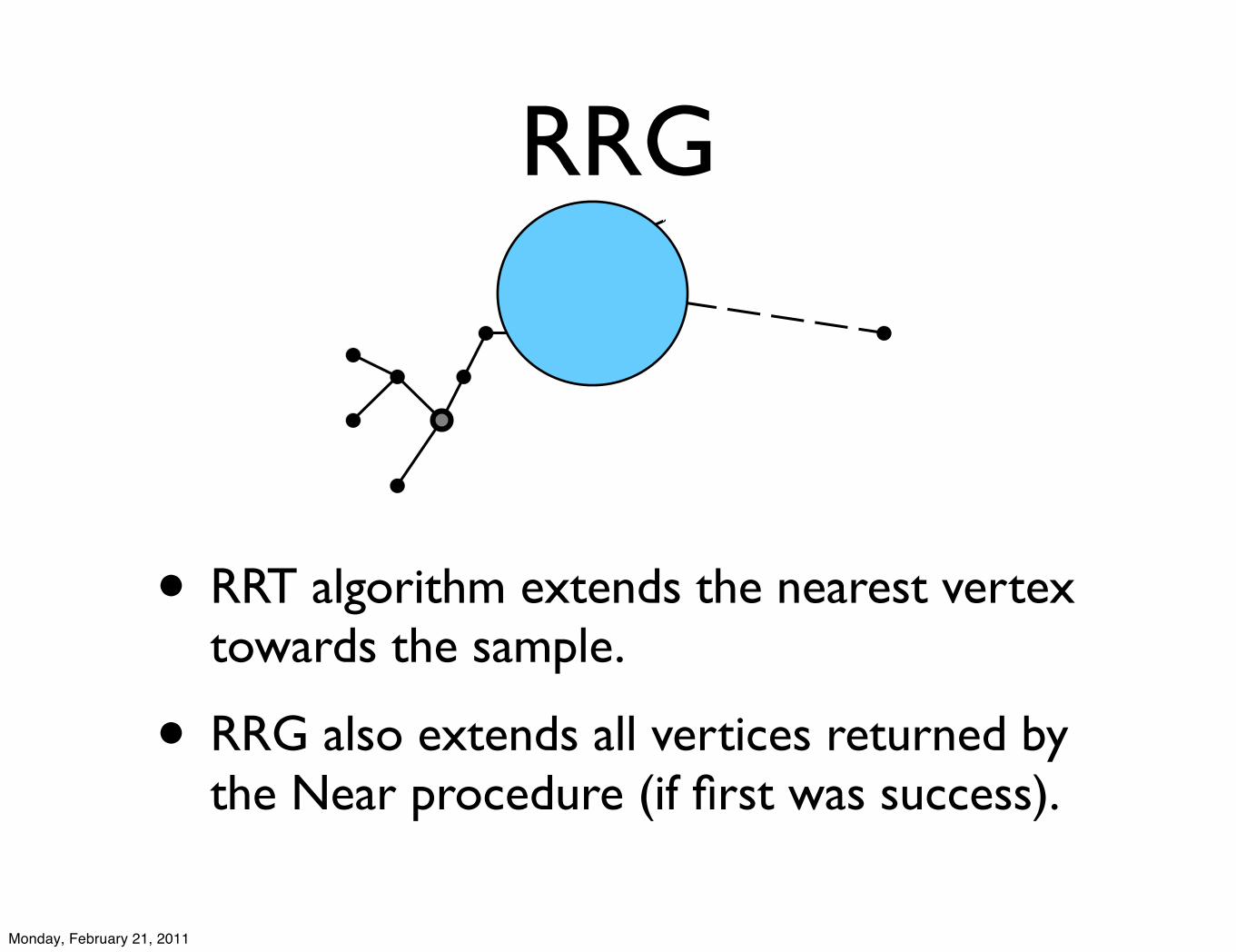
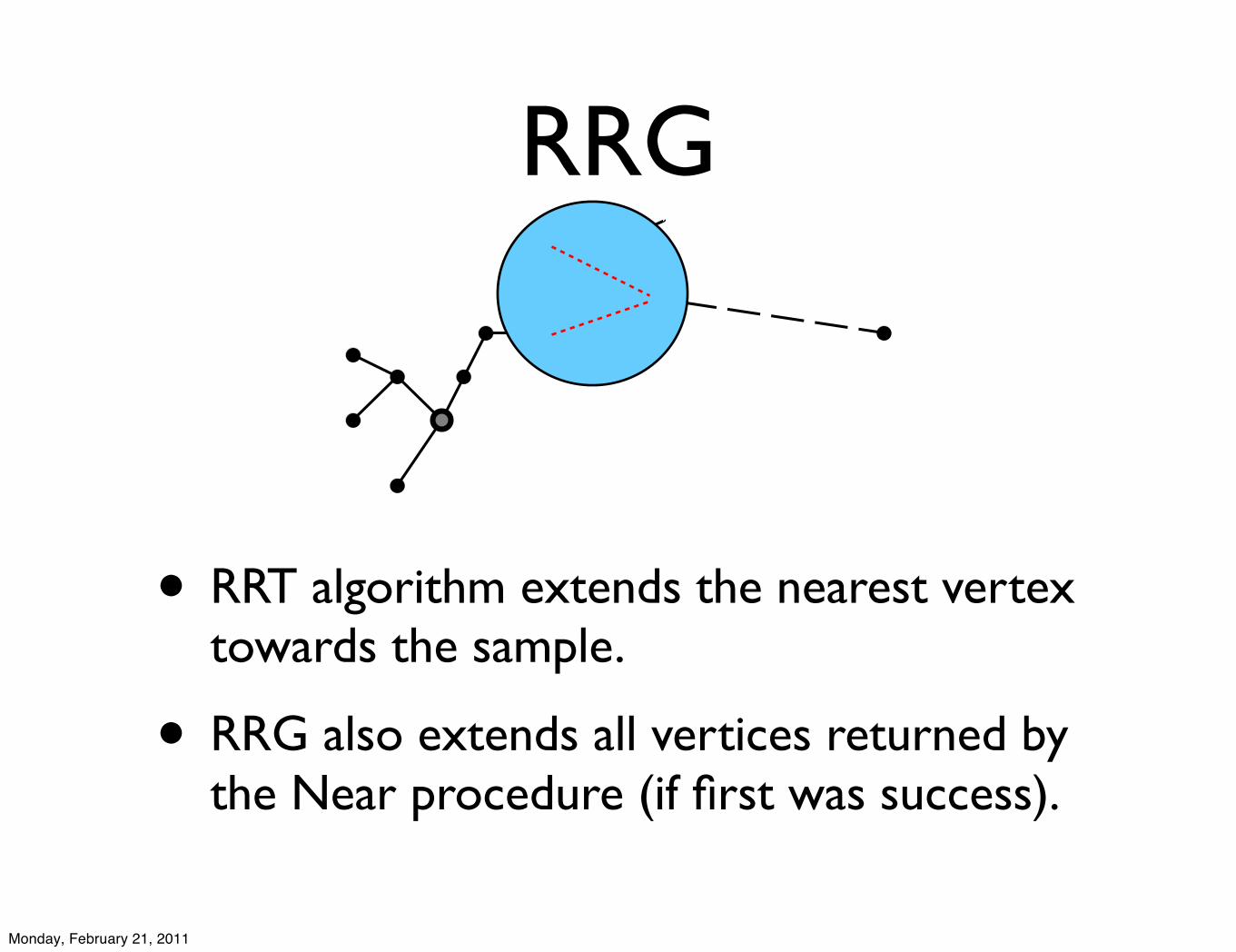
RRG
• RRT algorithm extends the nearest vertex towards the sample.
• RRG also extends all vertices returned by the Near procedure (if first was success).
Monday, February 21, 2011
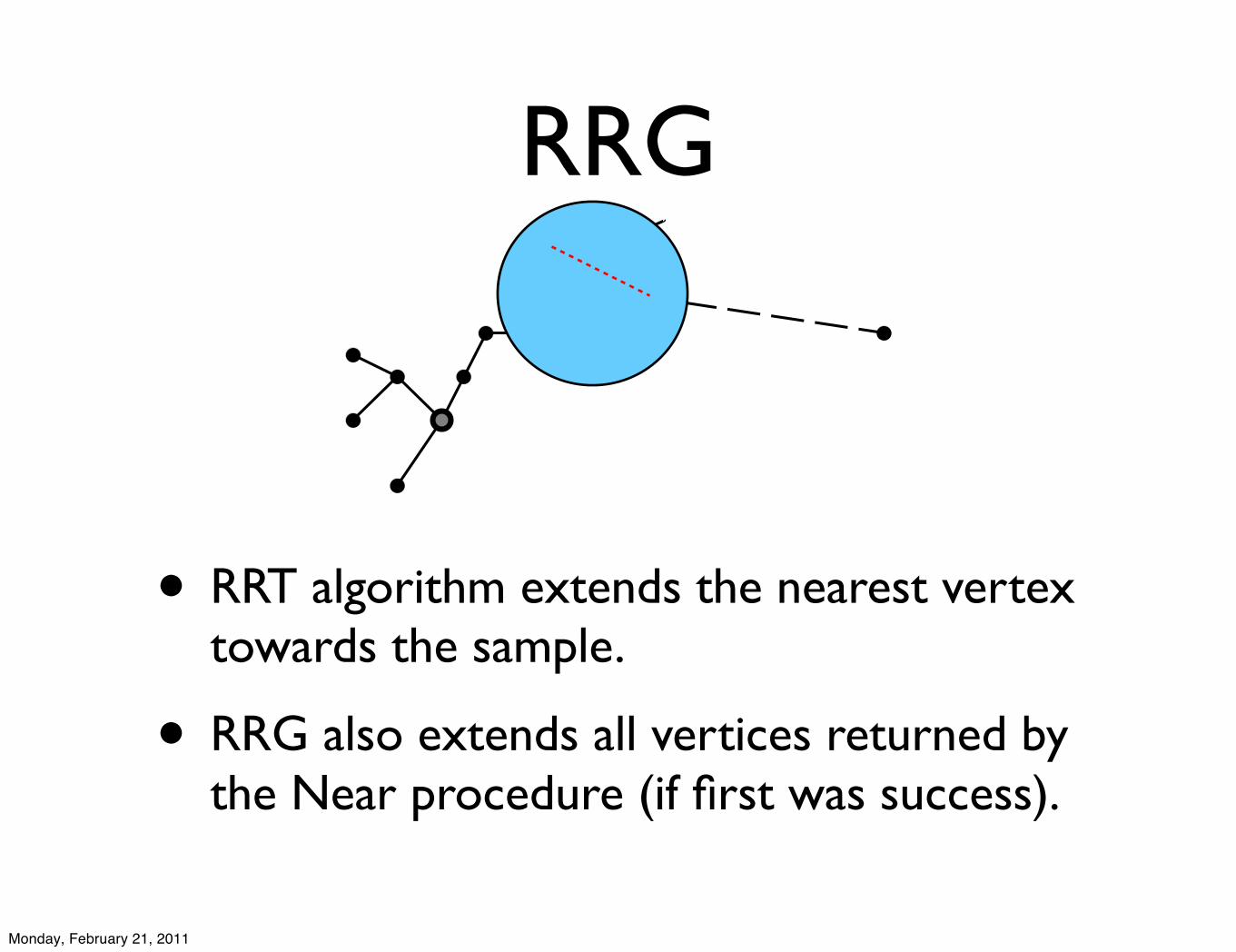
RRG
• RRT algorithm extends the nearest vertex towards the sample.
• RRG also extends all vertices returned by the Near procedure (if first was success).
Monday, February 21, 2011
RRG
• RRT algorithm extends the nearest vertex towards the sample.
• RRG also extends all vertices returned by the Near procedure (if first was success).
Monday, February 21, 2011
RRG
• RRT algorithm extends the nearest vertex towards the sample.
• RRG also extends all vertices returned by the Near procedure (if first was success).
Monday, February 21, 2011

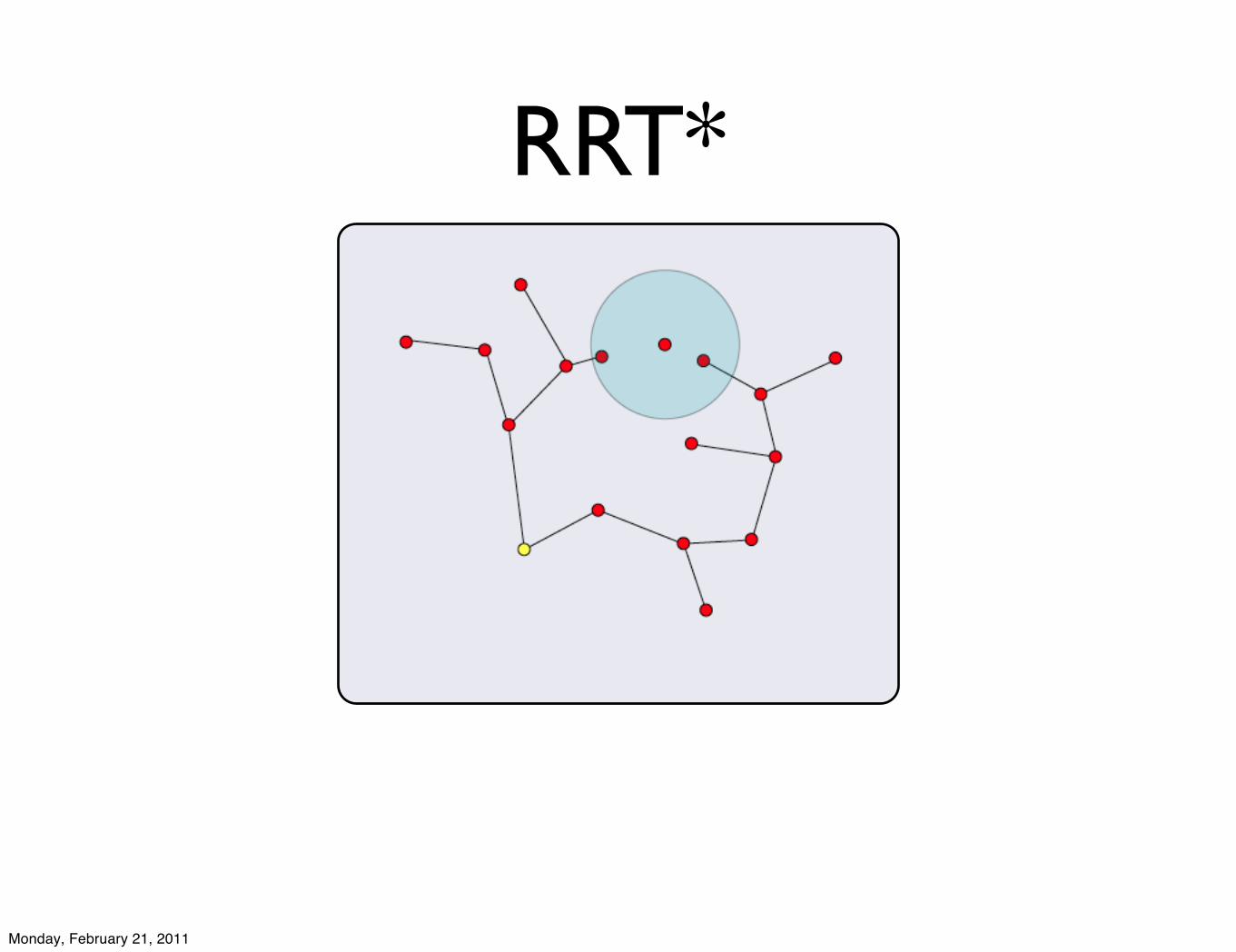
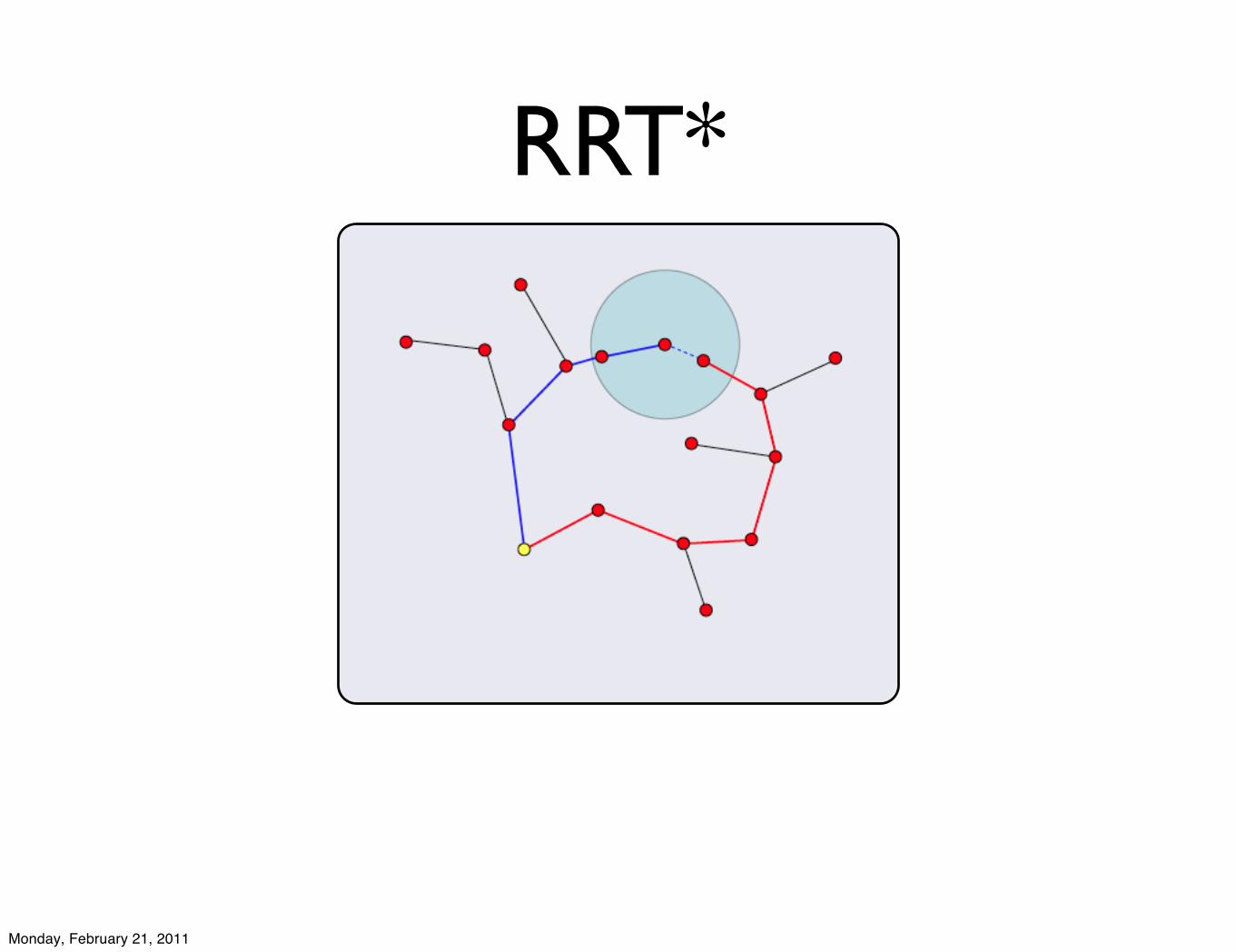
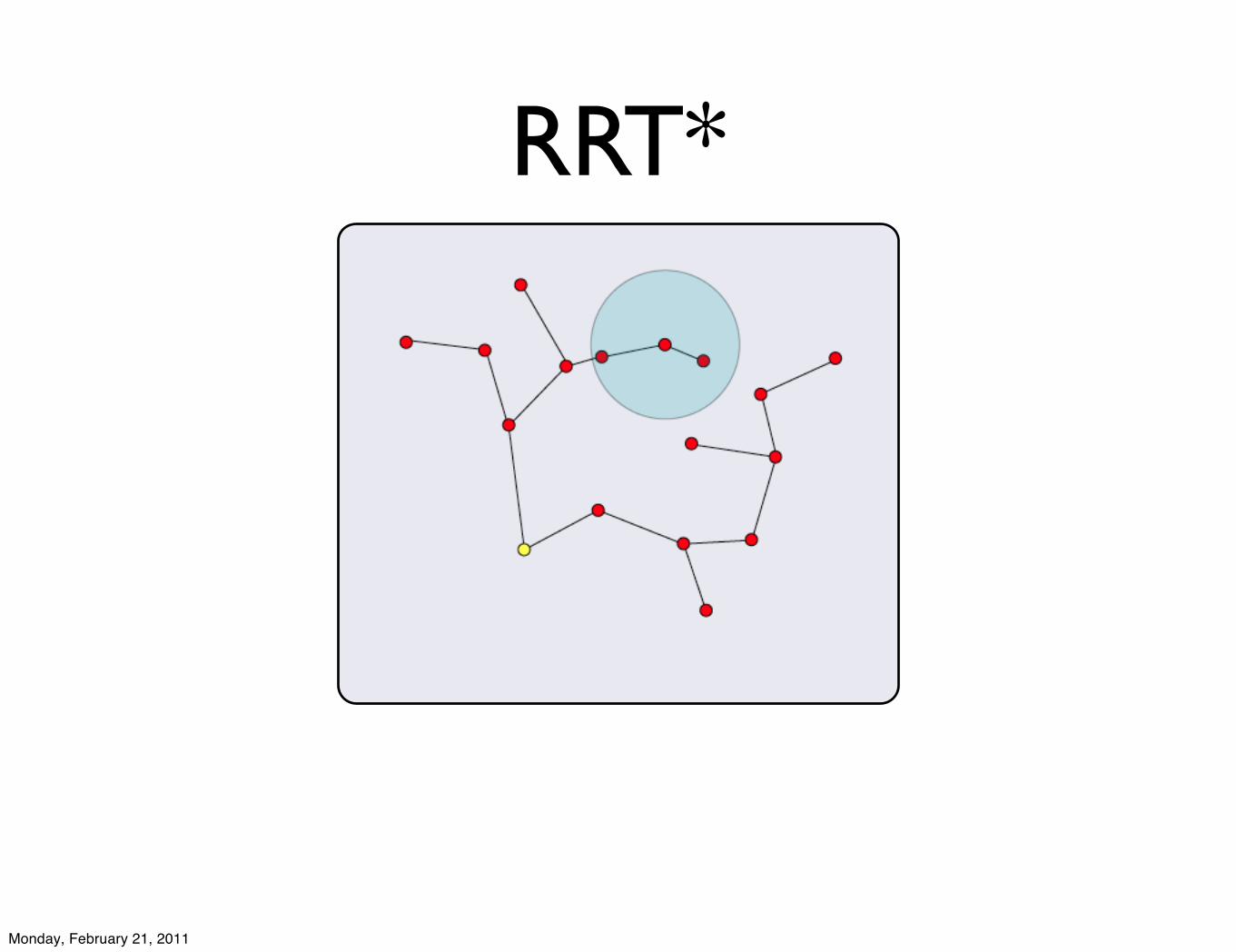
RRT*
• Frazzoli:
• RRT is a variant of RRG that essentially “rewires" the tree as better paths are discovered.
• After rewiring the cost has to be propagated along the leaves.
Monday, February 21, 2011

RRT*
Monday, February 21, 2011

RRT*
Monday, February 21, 2011
RRT*
Monday, February 21, 2011

RRT*
Monday, February 21, 2011

RRT*
Monday, February 21, 2011

RRT*
Monday, February 21, 2011
RRT*
Monday, February 21, 2011
RRT*
Monday, February 21, 2011

RRT*
Monday, February 21, 2011

RRT vs RRT*
Monday, February 21, 2011
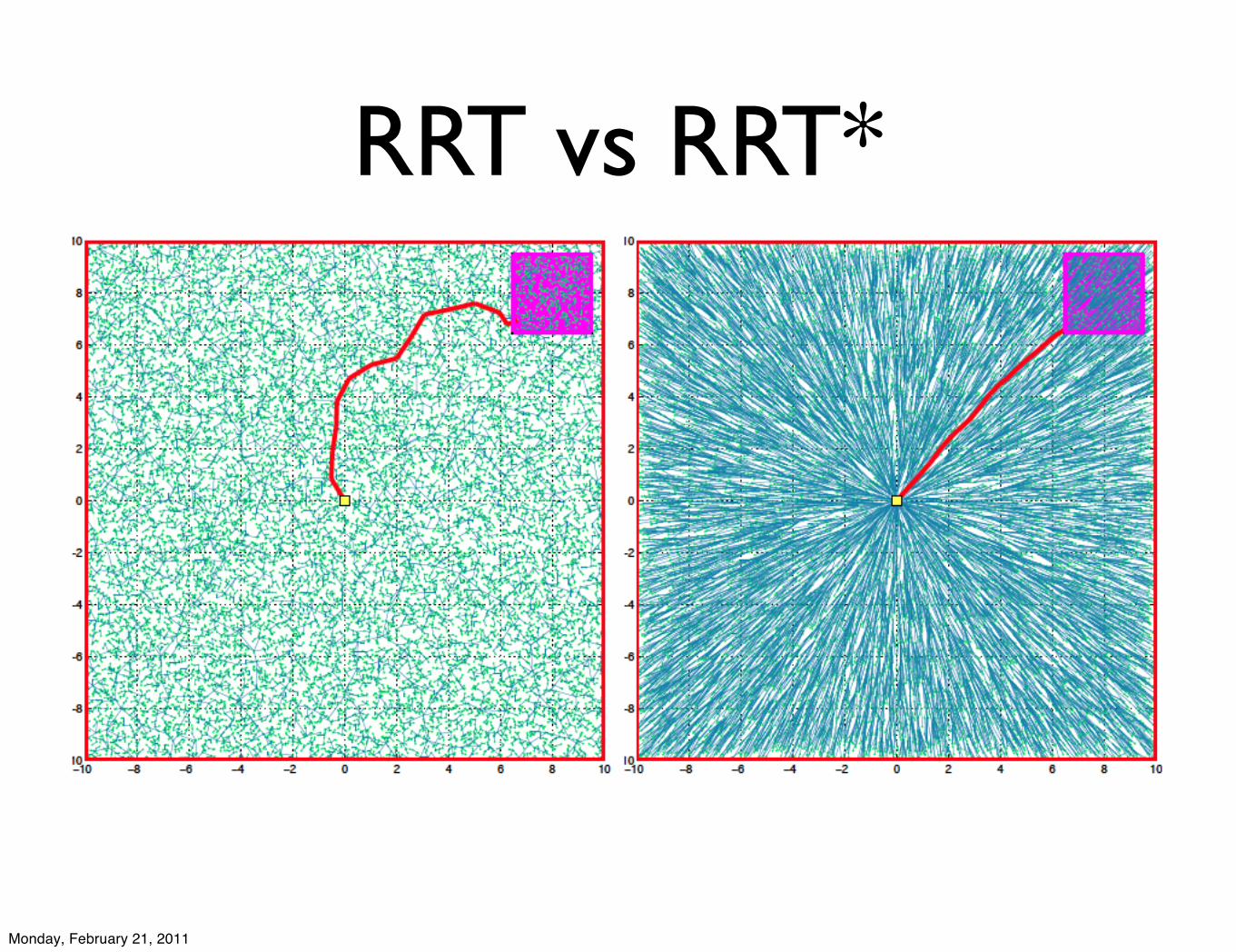
RRT vs RRT*
Monday, February 21, 2011
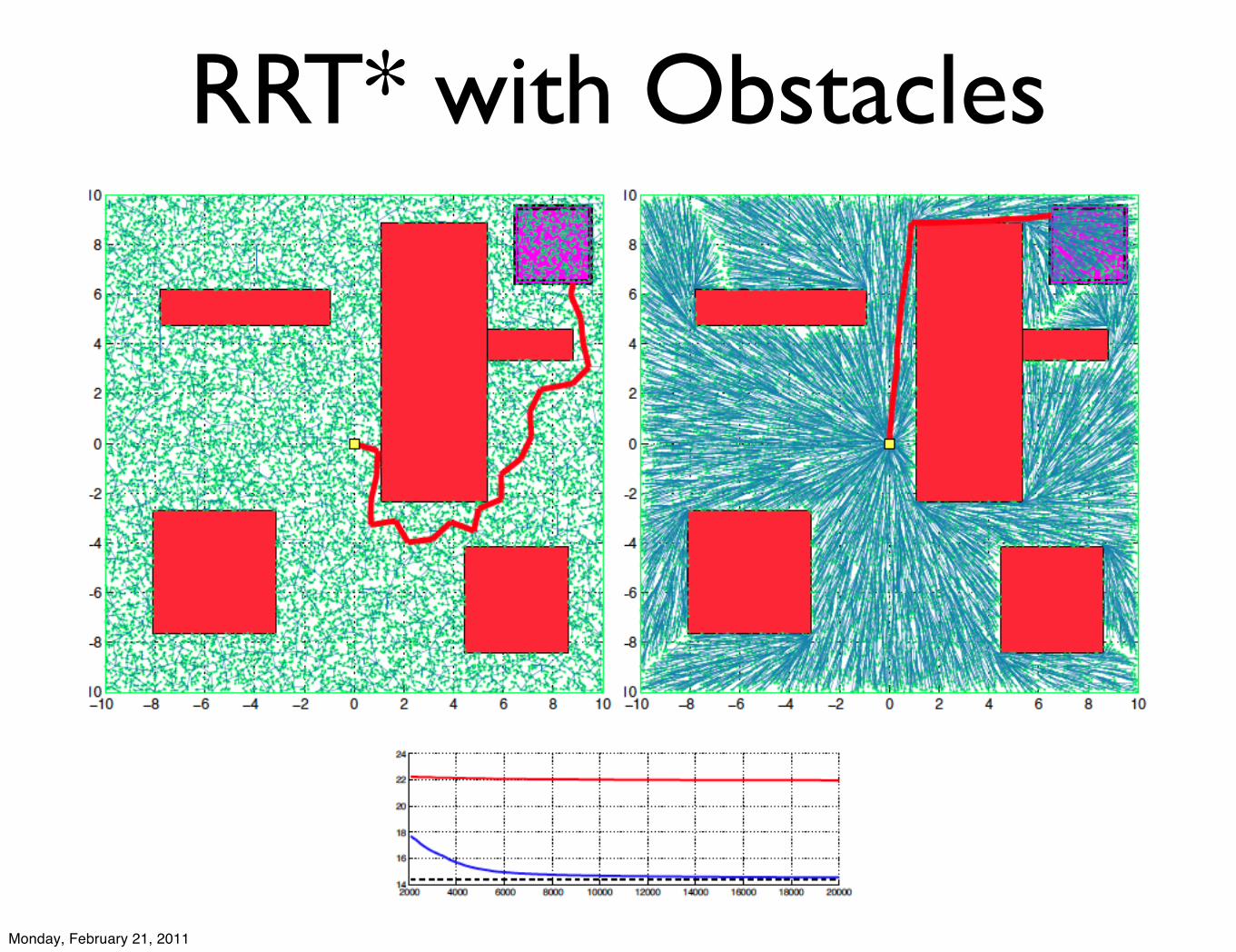
RRT* with Obstacles
Monday, February 21, 2011

Anytime RRT*
Monday, February 21, 2011

Aggressive Drivinghttp://www.youtube.com/watch?v=Tdmm3i52WBc
Monday, February 21, 2011
Conclusion
• RPM: multiple-query, holonomic
• RRT: single-query, non-holonomic, suboptimal
• RRG, RRT*: single-query, holonomic, optimal
Monday, February 21, 2011


![Intelligent bidirectional rapidly-exploring random trees ... · (PRM) [14] [15] and Rapidly exploring Random Trees (RRT) [23]. However, PRMs tend to be ine cient when obstacle geometry](https://static.fdocuments.us/doc/165x107/5fed728ed484d45f7e7546fc/intelligent-bidirectional-rapidly-exploring-random-trees-prm-14-15-and.jpg)















