
Principles for climbing with dry adhesion - Stanford...
35
Stryker Interaction Design Workshop September 7-8, 2005 1 3/24/13 Principles for climbing with dry adhesion 2. Directional adhesives 1. Hierarchical compliance 3. Distributed force control
Transcript of Principles for climbing with dry adhesion - Stanford...
Stryker Interaction Design Workshop September 7-8, 2005
1 3/24/13
Principles for climbing with dry adhesion
2. Directional adhesives
1. Hierarchical compliance
3. Distributed force control
Stryker Interaction Design Workshop September 7-8, 2005
2 3/24/13
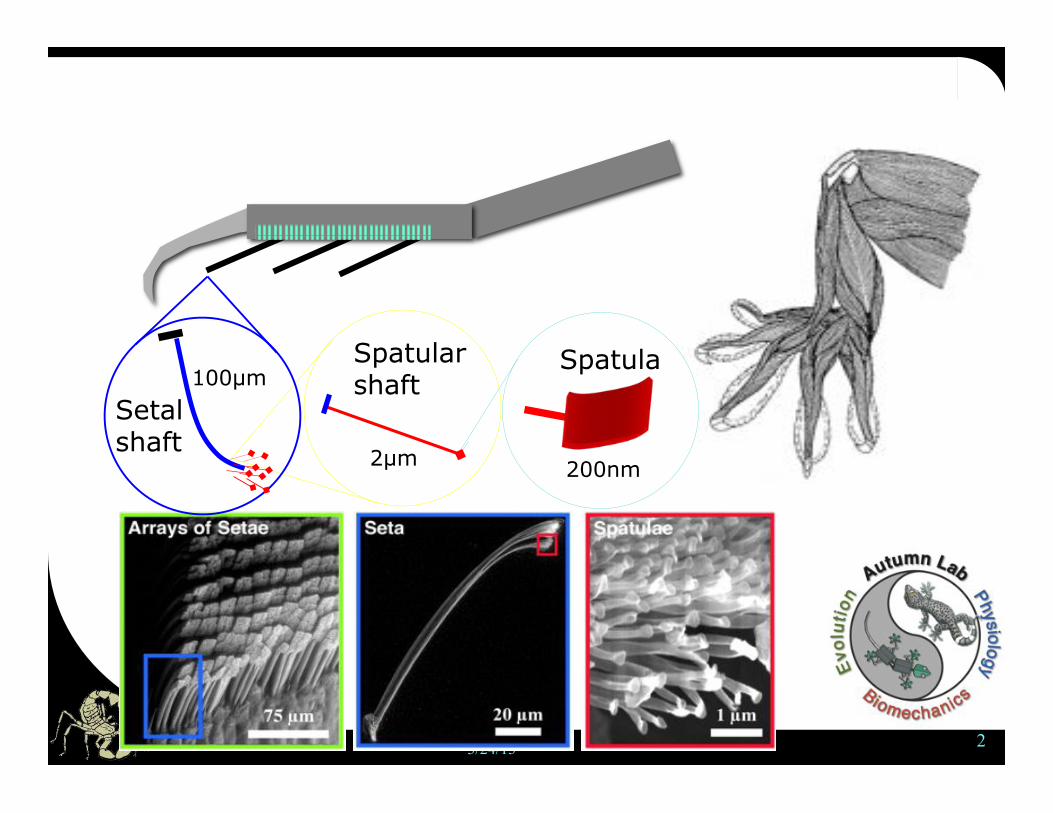
Spatular shaft
2!m
Spatula
200nm
Setal shaft
100!m
Lamella
Cushions 1cm
1mm
Conforming to surfaces: hierarchy of compliant structures in the gecko

Stryker Interaction Design Workshop September 7-8, 2005
3 3/24/13
Directional gecko adhesion
25 mN of Adhesion
Gecko setae dragging with curvature
-30
-20
-10
0
10
20
30
40
50
0 1 2 3 4
Time (s)
Forc
e (m
N)
Colored: Normal force Gray: Shear force
Dragging against curvature
No Adhesion
Time (s)
Forc
e (m
N)
-30
-20
-10
0
10
20
30
40
50
0 1 2 3 4
Stryker Interaction Design Workshop September 7-8, 2005
4 3/24/13
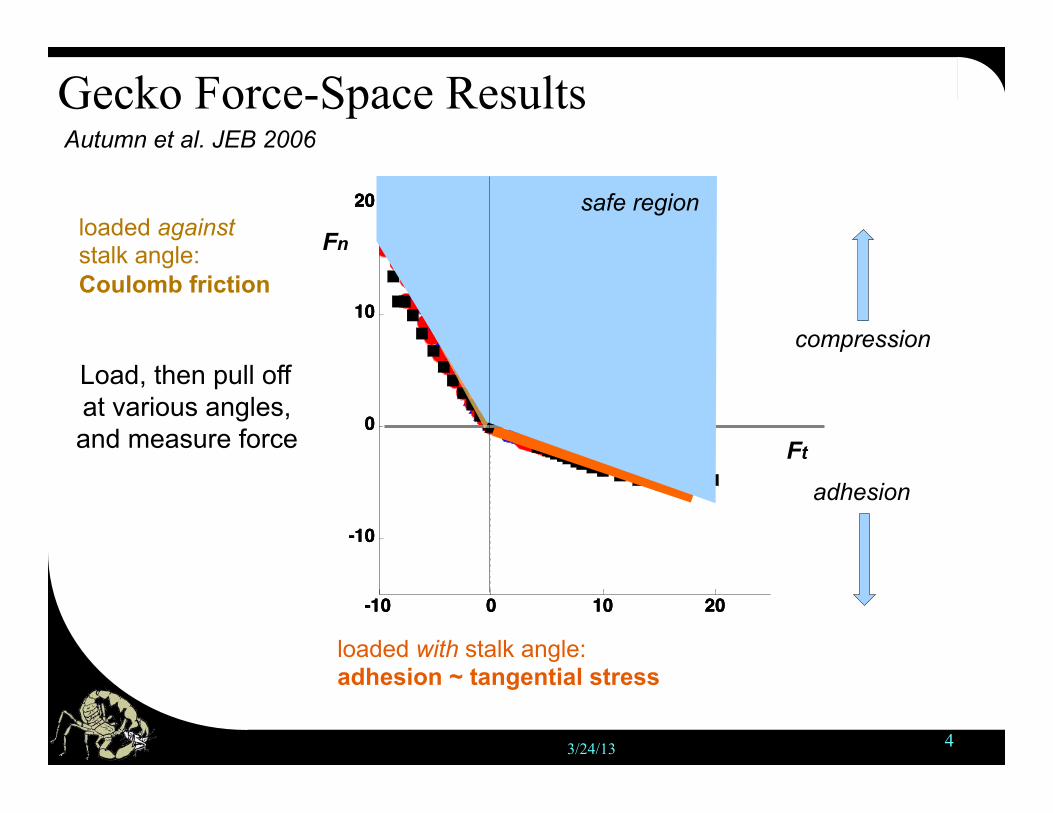
Gecko Force-Space Results
Load, then pull off at various angles, and measure force
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm600µm
-10 0 10 20
-10
0
10
20
Tangential Force (mN/stalk)
Normal Force (mN/stalk)
500µm600µm700µm
loaded with stalk angle: adhesion ~ tangential stress
loaded against stalk angle: Coulomb friction
safe region
Autumn et al. JEB 2006
Fn
Ft
compression
adhesion

Stryker Interaction Design Workshop September 7-8, 2005
Directional adhesion: loading cycle determines adhesion
5 3/24/13
microscope video, side view with trajectory shown
normal and shear stress trajectory versus limit curve

Stryker Interaction Design Workshop September 7-8, 2005
Directional adhesion: loading cycle determines adhesion
6 3/24/13
microscope video, side view with trajectory shown
normal and shear stress trajectory versus limit curve
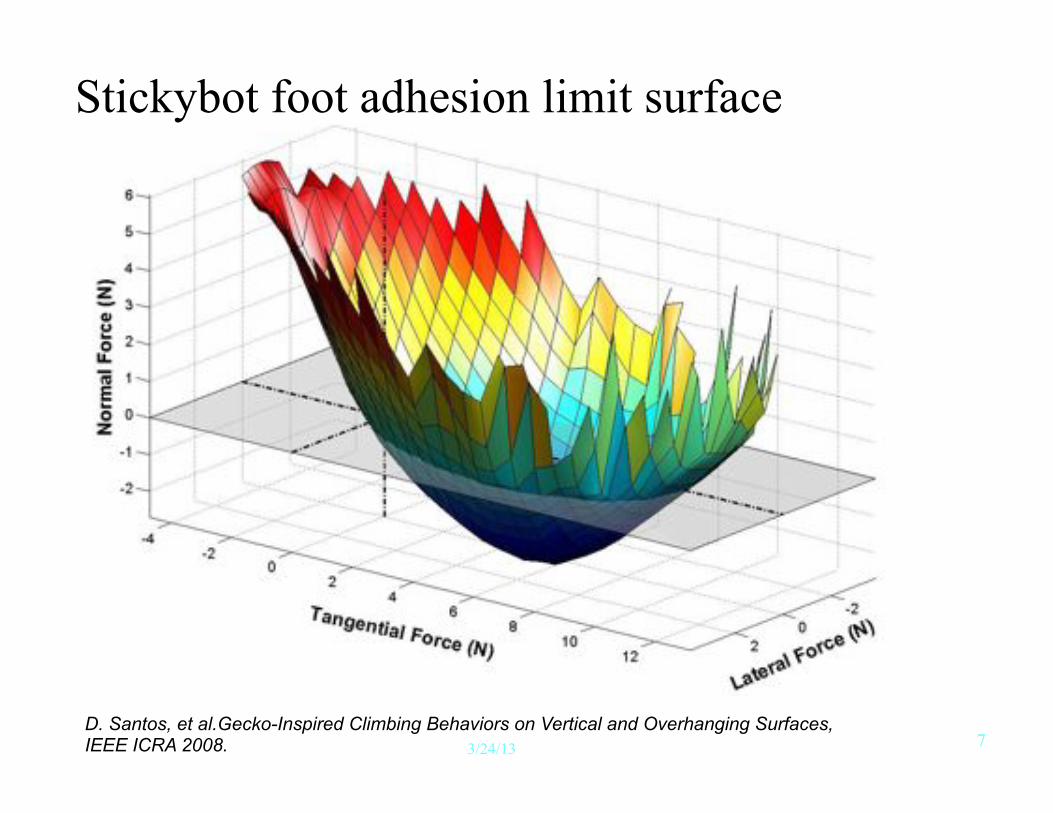
Stickybot foot adhesion limit surface
7 3/24/13 D. Santos, et al.Gecko-Inspired Climbing Behaviors on Vertical and Overhanging Surfaces, IEEE ICRA 2008.

Stryker Interaction Design Workshop September 7-8, 2005
Biomimetics Laboratory Stanford University
Daniel Santos
Adhesion limit surface implications
Johnson-Kendall-Roberts
FNormal
FTangential
Gecko “Frictional Adhesion”
FNormal
FTangential
Autumn, et al.; Journal of Experimental Biology; Volume 209, 2006
Stryker Interaction Design Workshop September 7-8, 2005
9 3/24/13
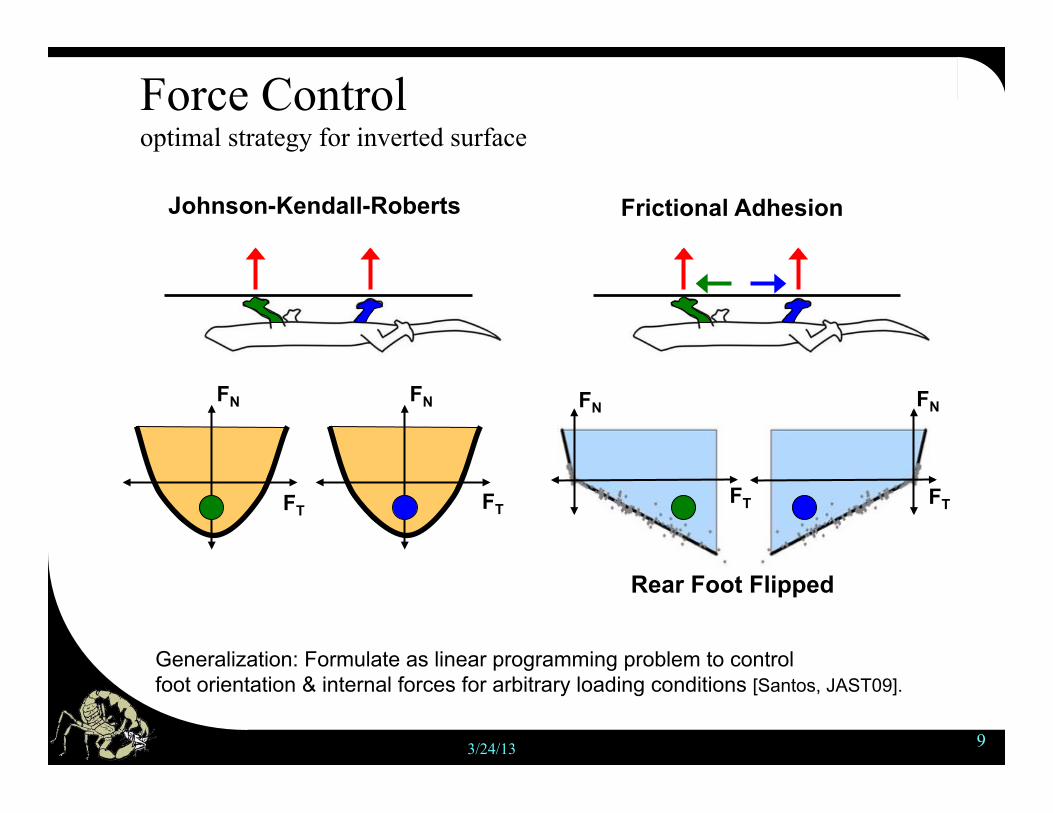
Force Control optimal strategy for inverted surface
Frictional Adhesion Johnson-Kendall-Roberts
Rear Foot Flipped
FN
FT
FN FN FN
FT FT FT
Generalization: Formulate as linear programming problem to control foot orientation & internal forces for arbitrary loading conditions [Santos, JAST09].

Stryker Interaction Design Workshop September 7-8, 2005
Biomimetics Laboratory Stanford University
Daniel Santos
Force Control: vertical surfaces consequences of adhesion model
Frictional Adhesion
FNormal
FTangential

3/24/13 11
-0.01 0
0.01
0.02
0.03
Gecko wall reaction forces F
orce
(N)
Left Fore
Right Fore
Right Hind
Left Hind
Lateral -0.04
-0.02
0
0.02
0.04
N=7 N=6
N=5 N=8
Normal -0.01
-0.005
0 0.005 0.01
N=7 N=6 N=5 N=8
Fore-aft N=7 N=6 N=5 N=8
K. Autumn R.J. Full

Stryker Interaction Design Workshop September 7-8, 2005
12 3/24/13
Control foot orientation + internal forces

Stryker Interaction Design Workshop September 7-8, 2005
13 3/24/13
Directional adhesion facilitates control of forces for smooth, efficient locomotion
Tangential force
Nor
mal
For
ce
Contact force limits
Safe force region
Desired loaded state
Desired attach/detach state
Stryker Interaction Design Workshop September 7-8, 2005
14 3/24/13
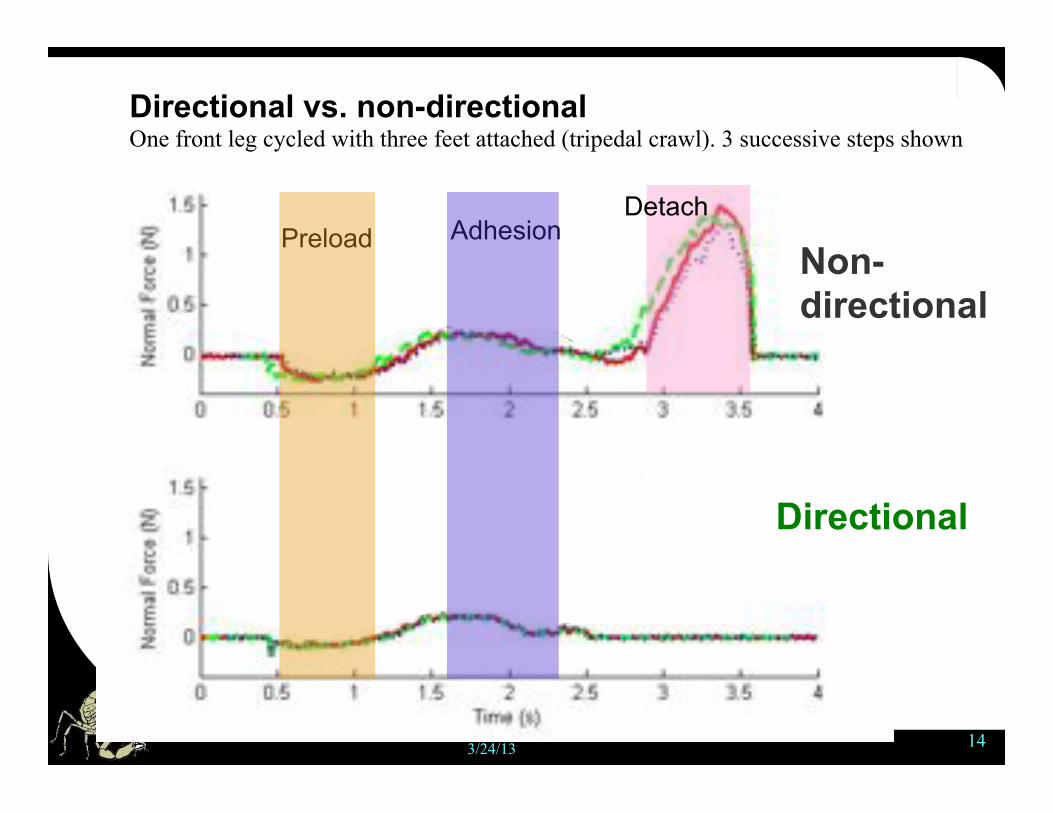
Directional
Directional vs. non-directional One front leg cycled with three feet attached (tripedal crawl). 3 successive steps shown
Preload Adhesion Detach
Non- directional

Stryker Interaction Design Workshop September 7-8, 2005
15 3/24/13
Dynamic Directional Adhesion
Hypothesis: directional adhesion ! gentle loading + lift-off ! long life
! Directional behavior similar to gecko and larger Stickybot stalks
! Adhesion maintained, while sliding.
! Provides non-catastrophic failure mechanism.
Stryker Interaction Design Workshop September 7-8, 2005
16 3/24/13
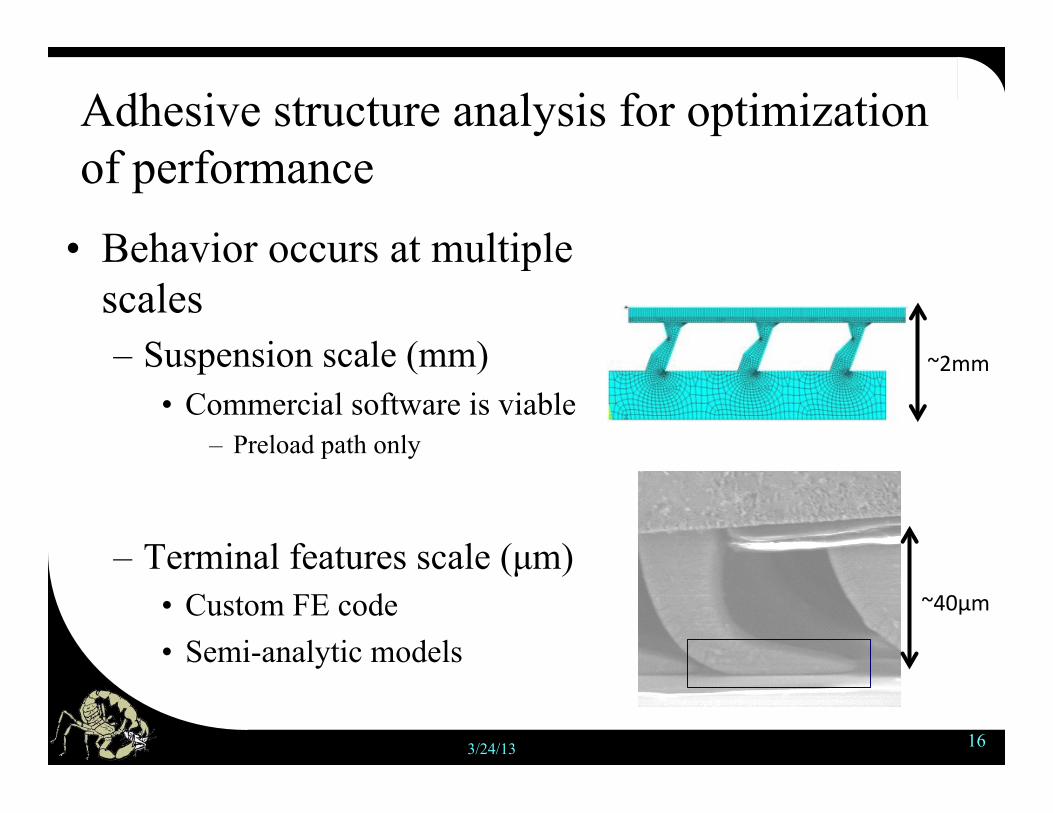
Adhesive structure analysis for optimization of performance
• Behavior occurs at multiple scales – Suspension scale (mm)
• Commercial software is viable – Preload path only
– Terminal features scale (µm) • Custom FE code • Semi-analytic models
!"##$
!%&'#$
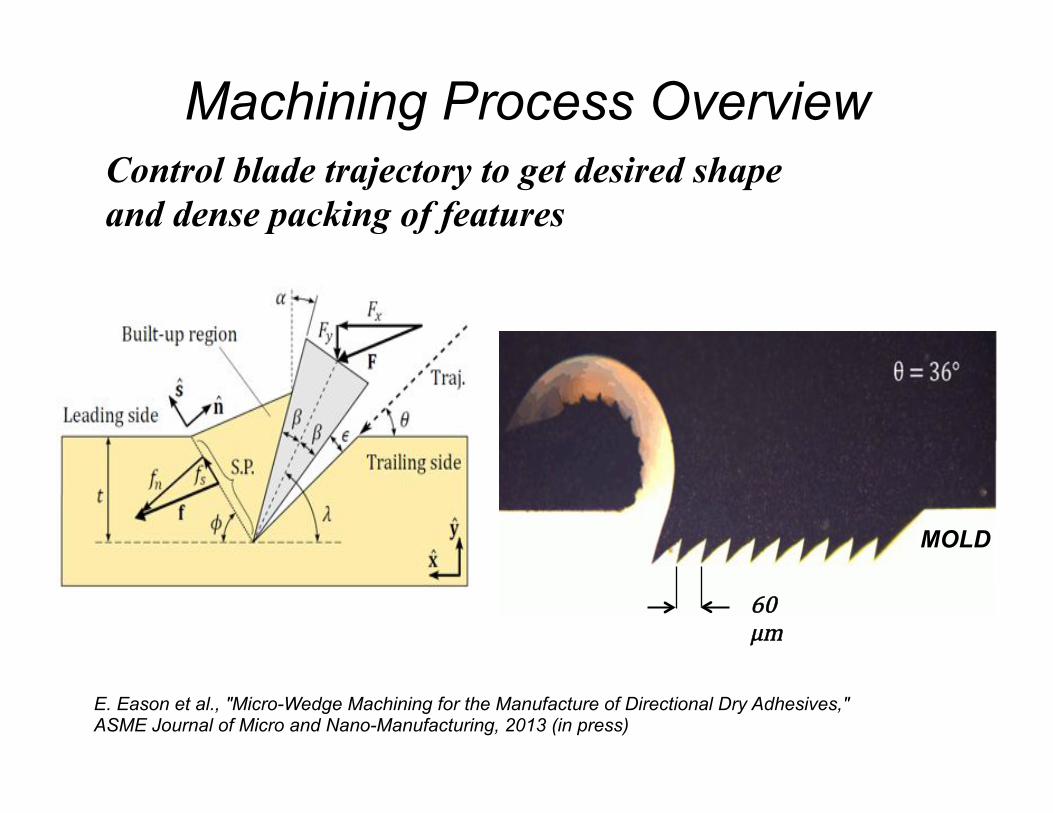
Machining Process Overview Control blade trajectory to get desired shape and dense packing of features
MOLD
!"#$%
E. Eason et al., "Micro-Wedge Machining for the Manufacture of Directional Dry Adhesives," ASME Journal of Micro and Nano-Manufacturing, 2013 (in press)

Stryker Interaction Design Workshop September 7-8, 2005
Angle control: micromachining process
Key Design Parameters • ()$*+,-.$/0$12.3$• 4)$5+6.35/3$12.3$*+,-.$• 7)$12.3$7.5,76$• 8)$12.3$89*:5+,$• ;)$#*6.35*-$</=+,>8$?/@=-=8
18
! "
h
E. Eason
Stryker Interaction Design Workshop September 7-8, 2005
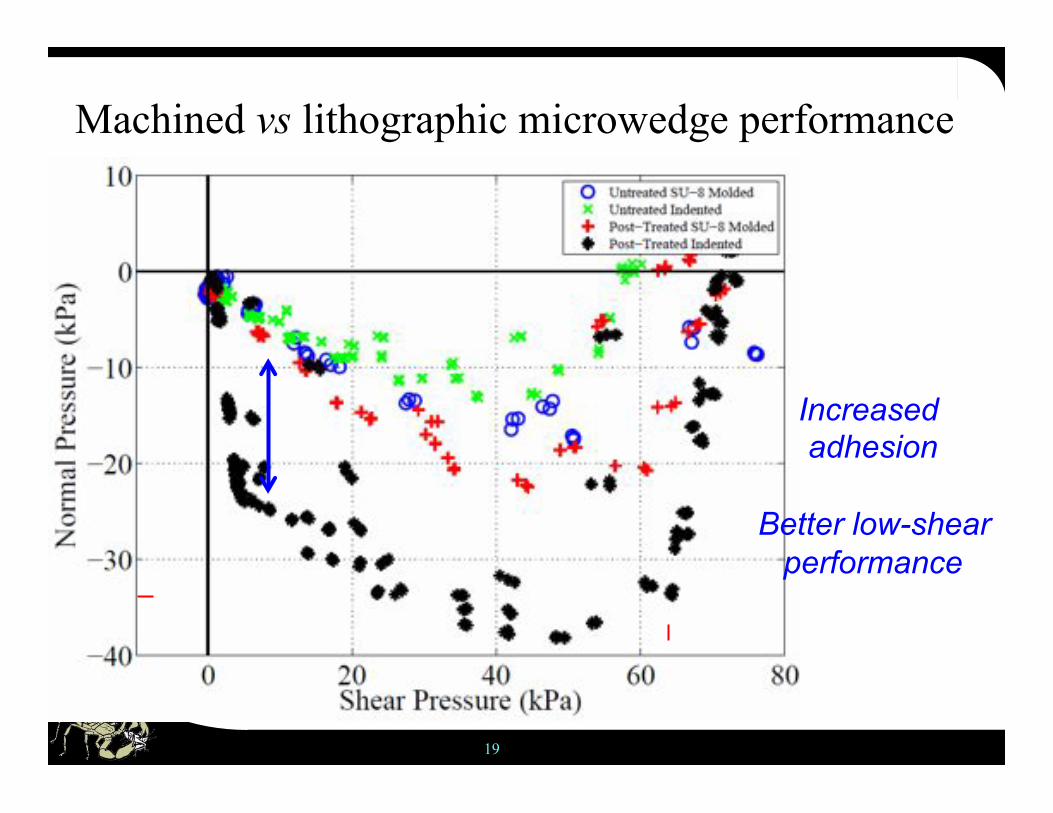
Machined vs lithographic microwedge performance
19
Increased adhesion
Better low-shear
performance

Stryker Interaction Design Workshop September 7-8, 2005
Test results with unfilled PDMS
20 psi
previous results (40kPa normal)
10 psi
Large scale results: 17 psi in pure shear over 1x1 in

Stryker Interaction Design Workshop September 7-8, 2005
Loading on the wall is different from benchtop tests; geometry affects limit surface
Different pull locations (structure is rigid between
pull location and contact points)
FT FN
h
h
r = 0 r = 0.1h r = 0.5h r = h r = 2h
r
!°
! =10°
Maximum |F| at the structure geometry
angle
Red r=0 lines match the original contact limit
surfaces
20° = contact limit surface angle
Alan Asbeck
unless one can pull from the red dot
location, any deviation from ideal angle produces
a moment and uneven pressure
Stryker Interaction Design Workshop September 7-8, 2005
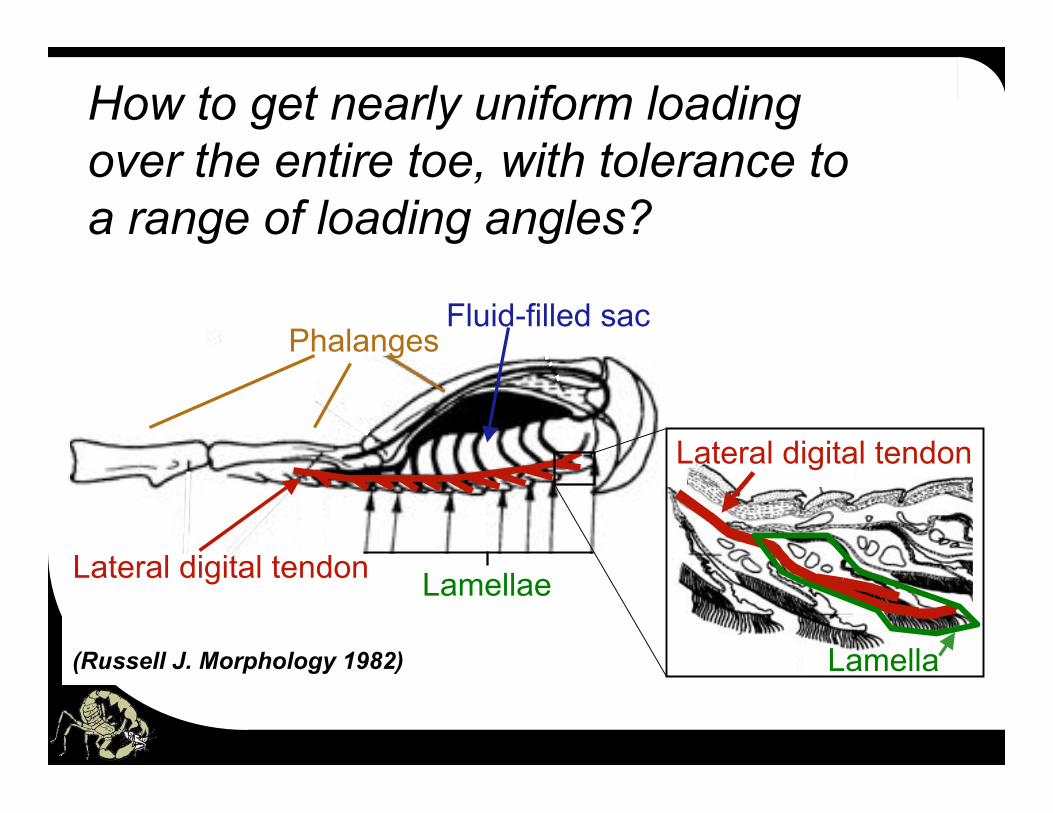
How to get nearly uniform loading over the entire toe, with tolerance to a range of loading angles?
Lamella
Bio-Inspiration
Phalanges
Lamellae
Fluid-filled sac
Lateral digital tendon
Lateral digital tendon
(Russell J. Morphology 1982)

Stryker Interaction Design Workshop September 7-8, 2005 23
Loading angles: alignment compensation
4 leg version of RiSE platform
4 kg gross loads
Stryker Interaction Design Workshop September 7-8, 2005
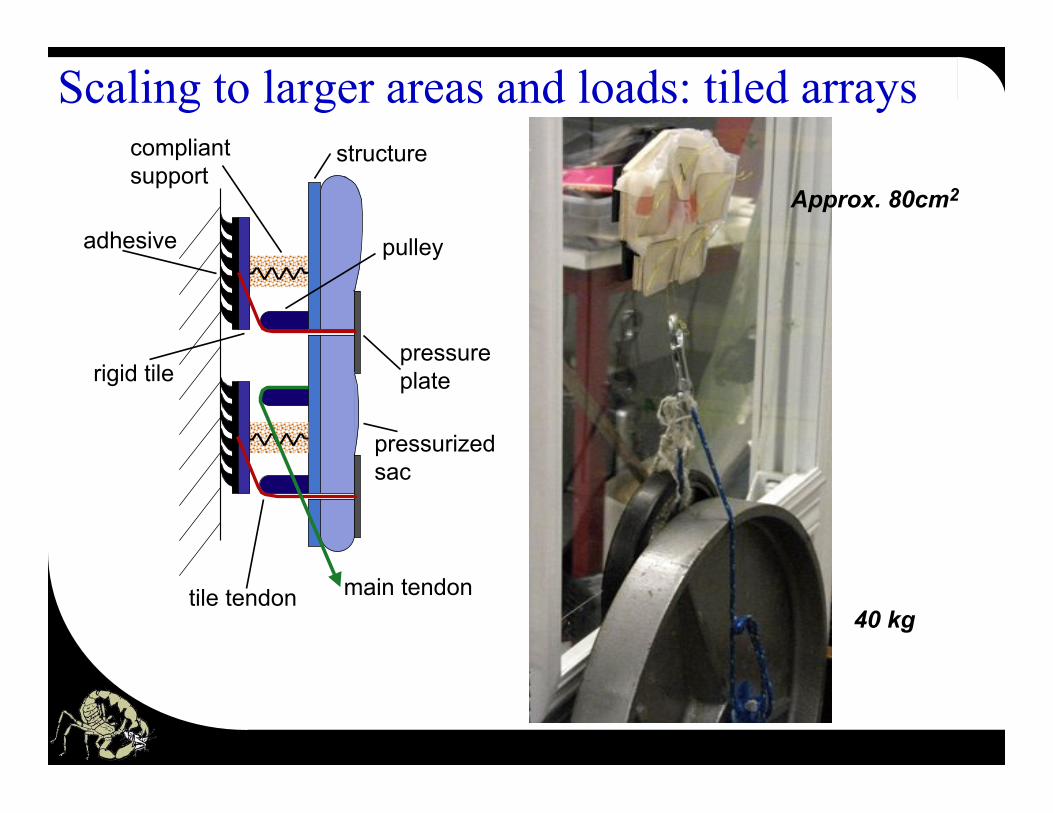
Scaling to larger areas and loads: tiled arrays
adhesive
rigid tile
pressurized
sac
pressure
plate
main tendontile tendon
compliant
supportstructure
pulley
40 kg
Approx. 80cm2

Stryker Interaction Design Workshop September 7-8, 2005 25
Scaling to larger areas and loads: results

?*+=0*:6=35+,[email protected]$
!"#$%&')$C*D$#/-@$58$+/6$@=3*2-.$E/$8=30*:.$63.*6#.+6)$3.=8.$FG"$H#.8$I.9.-$J5-*+.$63.*6#.+6)$3.=8.$KGL$H#.8$MN3*9.3O$$
P758$58$*+$&()&*+,-&$93/2-.#$I.9-*:5+,$#/-@$6*Q.8$%$73$M./001*6$RSKT73O$
U.$C*+6$6/$3.=8.$#/-@8$VF&&$H#.8$?/-@$:/86$9.3$=8.)$"W%$#5+$M./O$
AX.#968$*6$#/3.$@=3*2-.$#/-@8$
FW$Y8.$7*[email protected]$#*6.35*-$5+$#5:3/#*:75+5+,$AX.#96.@$2Z$J6*+0/3@$M[2GJ+O$*+@$N3*9.3$\/3:.8$*3.$6//$75,7)$5+@.+H+,$6//-$@.].:68$*+@$@=--8$
"W$^/86GC*D$:*8H+,$6/$3.9-5:*6.$#/-@$5+$#.6*-$_/+:.3+8$*2/=6$8=30*:.$1+587$`$,3*5+$85a.$
bW$E5:Q.-$#.6*--5a*H/+$/+$C*D$#/-@$MN3*9.3O$[//3$8=30*:.$1+587$*+@[email protected]$8/$0*3$
%W$N*=,76.3$#/-@8$#*@.$03/#$*@7.85B.8$!"#',+,*21

N*=,76.3$#/-@8$c$
d$
e$
[N?J$)34&"*103/#$C*D$#/-@$
f*3@$9/-Z#.3$536278&"$'#%51
E.C$[N?J$*@7.85B.$

?*6.35*-8$:/#9*H25-56Z$3.g=53.#.+68$
N*=,76.3$#/-@$#*6.35*-$_=3.8$/+$[N?J$9#1$#*516/$[N?J$E/$@586/3H/+$@=35+,$:=3.$
$J6.9$"$58$93/2-.#*H:$
[N?J$9*X.3+$,.68$6/3+$-.*B5+,[email protected]$5+$#/-@$_*++/6$2.$"&'#-&51:&+8"#;+10.*6=3.$H98$
c$
d$

N*=,76.3$?/-@$:/#9*H25-56Z$635*-8$P.86.@$S$.9/D5.8h$b$=3.67*+.8h$"$#/-@$3.-.*8.8$
;9/D5.8$2/+@.@$863/+,-Z$6/$9*X.3+h$:*=85+,$8&3",*21
?/-@$3.-.*8.8$:*=8.@$-/88$/[email protected]$*+@$#5885+,$0.*6=3.8$
i.86$3.8=-68$C567$6"&873*&+$*+@$*#1'#%51"&%&3+&W$
!"#$"%&#'(%()*( +(,(%#-.%)/(
0)*(#+(%()*(#122
0,"345)*6#782!"##$%"&'()*($+,-.
!"##$%"&'+,-.
!"##$%"&'/)#.$+,-.
0,"345)*6#792#:;!"##$%"&'()*($+,-.
01&2)1#$%"&'-,$+,-.
01&2)1#$%"&'-,$+,-.
0<=#>)$#72/"#5?'(/"#@"/&
/"#5?'(/"#@"/&
/"#5?'($.%&#@"/&
A(B5"/#1#;"/!"##$%"&'/)#.$+,-.
!"##$%"&'+,-.
!"##$%"&'-,$+,-.
=<C"3D#E2!"##$%"&'/)#.$+,-.
!"##$%"&'/)#.$+,-.
!"##$%"&'-,$+,-.
F'()6#C%)/(*#GH!"##$%"&'()*($+,-.
!"##$%"&'+,-.
!"##$%"&'-,$+,-.
I4-#-%"JK>"J#L.*5!"##$%"&'()*($+,-.
!"##$%"&'()*($+,-.
!"##$%"&'-,$+,-.
M//"6N)/(#M0<124:!"##$%"&'-,$+,-.
!"##$%"&'-,$+,-.
!"##$%"&'-,$+,-.
M//"6N)/(#M0<924!"##$%"&'-,$+,-.
!"##$%"&'-,$+,-.
01&2)1#$%"&'-,$+,-.
M//"6N)/(#M0<824!"##$%"&'-,$+,-.
!"##$%"&'-,$+,-.
!"##$%"&'-,$+,-.
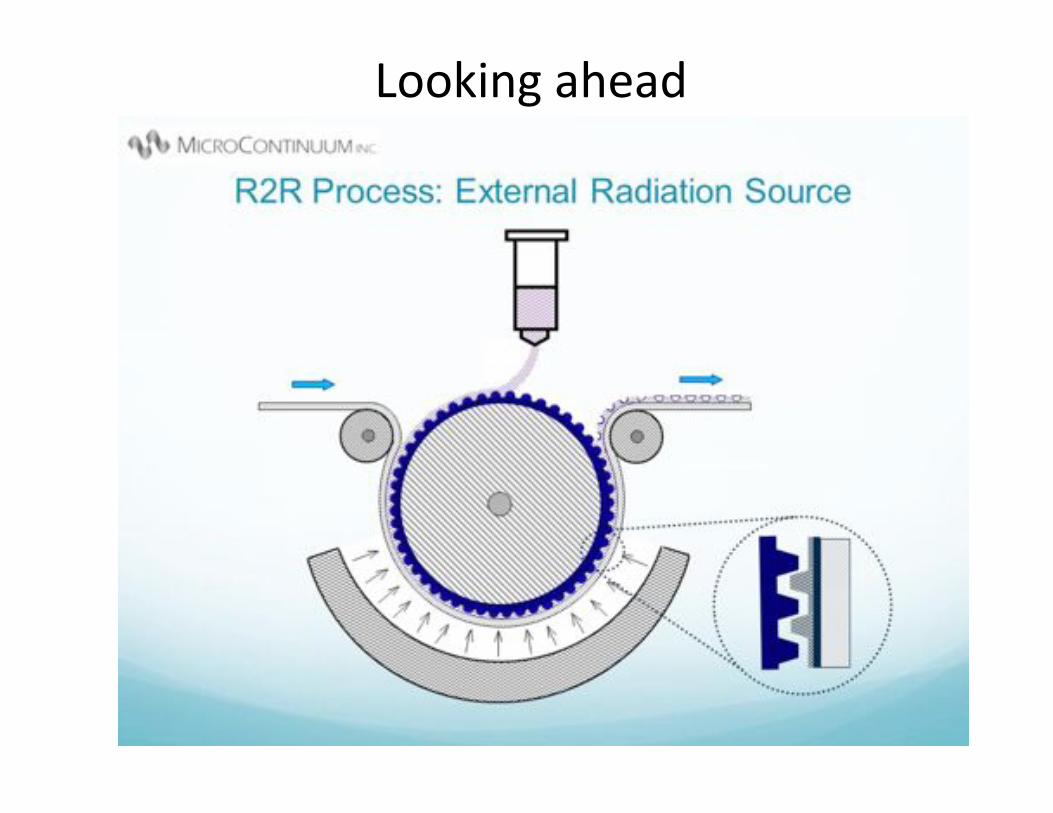
^//Q5+,$*7.*@$

32
Role Team Members Section
PI Aaron Parness 347
Co-I Mark Cutkosky Stanford
Co-I George Studor JSC
Co-I Victor White 389
Co-I Carl Seubert 344
Task Objectives: 1. Develop full capture head using
current gecko adhesive and leveraging small-scale two pad gripper prototypes
2. Mock up compliant robotic arm and integrate with capture head for floating object capture demonstration on RoboDome testbed
Infusion Path: option A: Small Sat Demo (partner with
Qinetiq and Aerospace Corp) option B: ISS experiment or inspection
(partner with JSC)
Critical Milestones Date
Demo of capture head on stiff mount Apr 2013
Completion of mock-up compliant arm Jun 2013
Demo of floating object capture Sep 2013
Gecko-Inspired ON-OFF Adhesives For Orbital Debris Mitigation
Primary Technical Hurdles: • Scaling 2-pad prototypes to full capture head
• Correctly sizing compliance in robotic arm • Integrating elements for demo
Technical Approach / Expected Accomplishment: Develop Robotic Capture Head Mock up compliant robotic arm
Demo floating object capture
!"#$%&'($)**+%,-'./&0"1'
2'!34'56#678'9$1'
:53;9<;'='.8),,%,-''>%?)$'
Debris
Gecko Grapple System Small Sat
Inspired partly by new Zman spin-off:

/67.3$,3/=98>$*@7.85B.8$7X9)TT3/2/H:8W..:8W2.3Q.-.ZW.@=T!3/+0Tj.:Q/T,.:Q/G252-5/W76#-$
• _?Y$MJ5kO$• Y_$i.3Q.-.Z$M\.*35+,O$$• ?*D$[-*+:Q$l+86W$MA3a6O$• Y_Ji$MP=3+.3O$• _*8.$U.86.3+$MN*5O$• J./=-$MJ=7O$• W$W$W$!"#$%"&%$'(#(%)(*+,)(%-")(%.")-/0%&")1(%$"%#2134%5+$%/0#"%6)"7,8(%-")(%/8'(#,".%".1(%/9/1'(8:%;'(<%/)(%0(##%"62-,=(8%&")%10,-5,.>%/.8%7()<%0"?%(.()><%/9/1'-(.$@8($/1'-(.$:%A2004%$'(<%/)(%*+,$(%,.$()(#2.>%$""B%

</=3$,3/=9>8$6*8Q)$
• \5+@$*$3.*8/+*2-.$m=8*,.$:*8.n$o$*88=#.$6.:7+/-/,Z$C5--$:/+H+=.$6/$5#93/B.h$:/86$C5--$:/#.$@/C+W$
• \5+@$*$<+&"$*+@$675+Q$*2/=6$C7*6$87.$/3$7.$+..@8$
• [3.8.+6$Z/=3$5@.*$/+$P7=38@*Z$MFG"[email protected]$
Stryker Interaction Design Workshop September 7-8, 2005
This work has been supported by the RiSE program (DARPA BioDynotics N66001-03-C-8045) with additional support from NSF NIRT (ID 0708367) and COINS (UCB)
Robots in Scansorial Environments (RiSE)
Acknowledgements


















