Presentation 131
23
Low Cost Shadow Function based Articulated Robotic Arm Authored by – Vishwajit Nandi, Pronadeep Bora June 12, 2015
-
Upload
pronadeep-bora -
Category
Documents
-
view
46 -
download
3
description
mmmmm
Transcript of Presentation 131

Low Cost Shadow Function based ArticulatedRobotic Arm
Authored by –Vishwajit Nandi, Pronadeep Bora
June 12, 2015

OutlineIntroduction
Aim of the Project
Factors under Consideration
Material Selection
System Design
The Control System
Conclusion

Low Cost Shadow Function based Articulated Robotic Arm
Introduction• Requirement of Robotic Arm took birth when humans felt the importance of reaching
places where a Human Arm cannot reach without harming itself or to do things beyondits capabilities.
• A Robotic Arm is a robot manipulator, usually programmable, with similar functionsto a human arm.
• Application of Robotic Arms includes Cranes, Excavators etc.
• Principle of Robotic Arm is used in various industries for manufacturing and productionpurposes.
ICEPE 2015 | NIT Meghalaya 3/23

Low Cost Shadow Function based Articulated Robotic Arm
Aim of the Project
• To build an Articulated Robotic Arm.
• To establish a proper way of controlling the Robotic Arm.
• To establish 5 Degree of Freedom within the workspace of the Arm.
• The Robotic Arm should replicate the moment of the Human Arm.
• The final design must be cost effective.
ICEPE 2015 | NIT Meghalaya 4/23

Low Cost Shadow Function based Articulated Robotic Arm
Factors under Consideration
Material Selection1. Cost
2. Weight of robot
3. Ease of manufacturing the parts
4. Ease of assembly
5. Strength and durability of the parts
ICEPE 2015 | NIT Meghalaya 5/23

Low Cost Shadow Function based Articulated Robotic Arm
Requirements for efficient Power transmission
1. Small size
2. Low weight and moment of inertia
3. High effective stiffness
4. Accurate and constant transmission ratio
5. Low energy losses and friction for better responsiveness of the control system
ICEPE 2015 | NIT Meghalaya 6/23

Low Cost Shadow Function based Articulated Robotic Arm
Material Selection
For the frameAvailable options for building the arm frame were –
• Beryllium, Steel – costly
• Ceramics – brittle
• Aluminium(Al), Magnesium(Mg) and Titanium(Ti) – ageing, creep in under constantloads, high thermal expansion coefficient etc.
• Fiber plastics and Glass-reinforced plastics – costly
Considering all the factors and keeping the price low a Al-Li alloy was finally selected for thepurpose.
ICEPE 2015 | NIT Meghalaya 7/23

Low Cost Shadow Function based Articulated Robotic Arm
For the actuators
• Servo motors were used because of its high precision, dynamic performances, reliabilityand stability.
• Servo motor can produce very high torque characteristics.
ICEPE 2015 | NIT Meghalaya 8/23

Low Cost Shadow Function based Articulated Robotic Arm
Torque calculation for the actuators
Wx : Weight of link ‘x’Lx : Length of link ‘x’
ICEPE 2015 | NIT Meghalaya 9/23

Low Cost Shadow Function based Articulated Robotic Arm
The servo motors used in the arm are thus chosen according to this calculation.Torque about Joint 1:
T1 =L1
2× W1 + (L1 +
L2
2) × W2 + (L1 + L2 +
L3
2) × W3
+(L1 + L2 + L3 +L4
2) × W4 + (L1 + L2 + L3 + L4) × W5 (1)
Torque about Joint 2:
T2 =L2
2× W2 + (L2 +
L3
2) × W3 + (L2 + L3 +
L4
2) × W4
+ (L2 + L3 + L4) × W5 (2)
Torque about Joint 3:
T3 =L3
2× W3 + (L3 +
L4
2) × W4 + (L3 + L4) × W5 (3)
ICEPE 2015 | NIT Meghalaya 10/23

Low Cost Shadow Function based Articulated Robotic Arm
System Design
Power Supply Unit• A High Current Step-Down Transformer is used to drop the voltage of the input AC
line.
• The Bridge Rectifier Circuit is made using IN5408 Power Diodes and High StorageCapacitor(3300 F).
• Each motor is given a separate voltage regulator to provide enough power. The voltageregulator used is 7806 which can give a maximum of 1A.
ICEPE 2015 | NIT Meghalaya 11/23

Low Cost Shadow Function based Articulated Robotic Arm
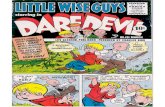
Arduino based PCB
• A Custom-made board based on Arduino Duemilanove has been made, optimized indesign for the purpose of the project.
• A preloaded Arduino Duemilanove Boot-loader, which directly supports Arduino Pro-gramming Language making the programming simpler, is used.
ICEPE 2015 | NIT Meghalaya 12/23

Low Cost Shadow Function based Articulated Robotic Arm
ATMEGA48/88/168-PU
1k
1k1k
10k
1k
100nF
100nF 100nF
100nF
10uF/40V
VC
C
VCC
VC
C
GND
GND GN
D
GND
GND
22pF
22pF
PW
M3
PWM5
PWM6
PWM9
PW
M10
PW
M11
GN
D
GN
D
GND
GND
GND
7805 7806 7806 7806 7806 78067806
GND GNDGND
GND
GNDGND
GNDGND
GND
GND
VC
C
GND
10uF/40V 10uF/40V 10uF/40V
10uF/40V
10uF/40V10uF/40V
VC
C
POWER_JACKSLT
IC1
PB5(SCK/PCINT5) 19
PB7(XTAL2/TOSC2/PCINT7)10
PB6(XTAL1/TOSC1/PCINT6)9
GND8
VCC7
AGND22
AREF21 AVCC20
PB4(MISO/PCINT4) 18PB3(MOSI/OC2A/PCINT3) 17PB2(SS/OC1B/PCINT2) 16PB1(OC1A/PCINT1) 15PB0(ICP1/CLKO/PCINT0) 14
PD7(AIN1/PCINT23) 13PD6(AIN0/OC0A/PCINT22) 12PD5(T1/OC0B/PCINT21) 11PD4(T0/XCK/PCINT20) 6PD3(INT1/OC2B/PCINT19) 5PD2(INT0/PCINT18) 4PD1(TXD/PCINT17) 3PD0(RXD/PCINT16) 2
PC5(ADC5/SCLPCINT13) 28PC4(ADC4/SDA/PCINT12) 27PC3(ADC3/PCINT11) 26PC2(ADC2/PCINT10) 25PC1(ADC1/PCINT9) 24PC0(ADC0/PCINT8) 23PC6(/RESET/PCINT14)1
R1
R2
R3
R4
R5
C10C
2
C11 C6
C8
C7
S1
1 342
Q1
21
C3
C4
LED
1JP
2 1 2 3
JP3 1 2 3
JP4123
JP5123
JP6123
JP7
123
JP8
123
LED
2
IC2GND
IN OUT
IC3GND
IN OUT
IC4GND
IN OUT
IC5GND
IN OUT
IC6GND
IN OUT
IC7GND
IN OUT
IC8GND
IN OUT
JP1123456
JP91 23 45 6
C15 C16 C17
C18
C19C20
J1
RST
RS
T
ICEPE 2015 | NIT Meghalaya 13/23

Low Cost Shadow Function based Articulated Robotic Arm
ICEPE 2015 | NIT Meghalaya 14/23

Low Cost Shadow Function based Articulated Robotic Arm
The Control System
Different Modes of Control
1. Manual Control Mode – Using Position Sensors(Potentiometers)
2. Computer Control Mode – Using a Computer’s Keyboard(via Serial Communication)
ICEPE 2015 | NIT Meghalaya 15/23

Low Cost Shadow Function based Articulated Robotic Arm
Manual Control Mode - The Potentiometer
• We connect three wires of the potentiometer to the Arduino board.–The first goes to ground from one of the outer pins of the potentiometer.– The second goes to 5 volts from the other outer pin of the potentiometer.– The middle pin of the potentiometer is connected to the analog inputs of the ArduinoBoard.
• By turning the shaft of the potentiometer, we change the amount of resistance oneither side of the wiper which is connected to the center pin of the potentiometer.–This changes the relative “closeness”of that pin to 5 volts and ground, giving us adfferent analog input.
ICEPE 2015 | NIT Meghalaya 16/23

Low Cost Shadow Function based Articulated Robotic Arm
Manual Control Mode - PWM Generation
• The 10 bit Successive Approximation ADCs that comes along with the PDIP of AT-Mega328P converts the analog inputs to represent 210 = 1024 digital levels.
• ‘0’ Volt analog input corresponds to 0D; ‘5’ Volt analog input corresponds to 1024D
• These 1024 digital quantized levels are mapped directly to the 180◦ rotation of the ServoMotor by generation of PWM signals in any of the 6 channels as per requirement.
ICEPE 2015 | NIT Meghalaya 17/23

Low Cost Shadow Function based Articulated Robotic Arm
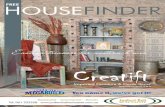
Manual Control Mode - Work flow
ICEPE 2015 | NIT Meghalaya 18/23

Low Cost Shadow Function based Articulated Robotic Arm
Computer Controlled Mode• 2 keys in the keyboard are defined
– one to increase the duty cycle of the PWM Signal– other to decrease the duty cycle of the PWM Signal.
• When a key, assigned for increasing/decreasing the duty cycle, is pressed its ASCIIvalue is transferred to the Controller Board and the Servo Motor rotates CW/CCWaccordingly.
• Programmable Serial USART of ATMega328P is used for communication between thecomputer and the Controller Board.
ICEPE 2015 | NIT Meghalaya 19/23

Low Cost Shadow Function based Articulated Robotic Arm
Computer Controlled Mode - Workflow
ICEPE 2015 | NIT Meghalaya 20/23

Low Cost Shadow Function based Articulated Robotic Arm
Conclusion
The Final Working Model of the Project taken in hand was a–
1. Low Cost 5 DOF Articulated Robotic Arm.
2. Low Cost Potentiometer-based controller.
3. Robotic Arm which can replicate a Human Hand movement.
4. Robotic Arm which can be controlled using a computer keyboard.
ICEPE 2015 | NIT Meghalaya 21/23

References[1] Gillespie, R.B. and Colgate, J. E.; Peshkin, M. A., “A General Framework for Robot Control,” IEEE Transactions on
Robotics and Automation, vol.17, no.4, pp.391-401, Aug 2001.
[2] J. C. Trinkle and R. James Milgram, “Complete Path Planning for Closed Kinematics Chains with Spherical Joints,” SAGEInternational Journal of Robotic Research, vol.21, no.9, pp.773- 789, Sep 2002.
[3] Gemeinder, M. and Gerke, M., “GA-based path planning for mobile robot systems employing an active search algorithm,”Applied Soft Computing, vol.3, no.2, pp.149-158, Sep 2003.
[4] Jegede Olawale; Awodele Oludele; Ajayi Ayodele; Ndong Miko, “Development of a Microcontroller Based Robotic Arm,”in Proceedings of the 2007 Computer Science and IT Education Conference, Mauritius, 2007, pg. 549-557.
[5] Six-servo Robot Arm[online]. Available:http://www.arexx.com
[6] Robotic Arm[online]. Available:http://explorerschools.nasa.gov/
[7] Arduino Duemilanove[online].Available:http://arduino.cc/en/Main/arduinoBoardDuemilanove

Thank You