PREDICTION AND SUPPRESSION OF LONG-PERIOD … · 2013-08-26 · Bulletin of the Seismological...
22
Bulletin of the Seismological Society of America. Vol. 63, No. 3, pp. 937-958. June 1973 PREDICTION AND SUPPRESSION OF LONG-PERIOD NONPROPAGATING SEISMIC NOISE BY ANTON ZIOLKOWSKI ABSTRACT Approximately half the noise observed by long-period seismometers at LASA is nonpropagating; that is, it is incoherent over distances greater than a few kilometers. However, because it is often strongly coherent with microbaro- graph data recorded at the same site, a large proportion of it can be predicted by convolving the microbarogram with some transfer function. The reduction in noise level using this technique can he as high as 5 db on the vertical seismometer and higher still on the horizontals. If the source of this noise on the vertical seismogram were predominantly buoyancy, the transfer function would be time-invariant. It is not. Buoyancy on the LASA long-period instruments is quite negligible. The noise is caused by atmospheric deformation of the ground and, since so much of it can be predicted from the output of a single nearby microbarograph, it must be of very local origin. The loading process may he adequately described by the static defor- mation of a fiat-earth model; however, for the expectation of the noise to be finite, it is shown that the wave number spectrum of the pressure distribution must be band-limlted. An expression for the expected noise power is derived which agrees very well with observations and predicts the correct attenuation with depth. It is apparent from the form of this expression why it is impossible to obtain a stable transfer function to predict the noise without an array of mierobarographs and excessive data processing. The most effective way to suppress this kind of noise is to bury the seismometer: at 150 m the reduction in noise level would he about 10 db. INTRODUCTION It has been known for some time that the noise recorded by long-period seismometers is composed of two parts: propagating noise, so-called because it is coherent over dis- tances of at least 100 kin, and nonpropagating noise, so-called because it is incoherent over distances greater than a few kilometers. Because the long-period seismometers at the Montana Large Aperture Seismic Array (LASA) are placed so far apart, the non- propagating component of the noise appears to be spatially disorganized. It has been shown by Haubrich and Mackenzie (1965) and Capon (1969) among others, using coherence spectra, that the nonpropagating component of the noise is correlated with microbarograph recordings at the same site at times when this component is significant. Since this component contributes at least 40 per cent of the noise up to 50 per cent of the time at LASA (Capon, 1969), it seemed worthwhile to consider the possibility of eliminat- ing it using the knowledge that the output of a given seismometer will be correlated with the output of a nearby microbarograph. The process of forming a coherence spectrum is a linear one, a coherence spectrum being the amplitude spectrum of a cross-correlation function. Any coherence in the frequency domain indicates that part of one time series is linearly dependent on the other time series. This is not to say that the physical process which relates the two time series is linear, merely that there is a linear component which, therefore, can be removed with a linear time-domain filter. If the physical process relating the two series & linear, it is 937
Transcript of PREDICTION AND SUPPRESSION OF LONG-PERIOD … · 2013-08-26 · Bulletin of the Seismological...

Bulletin of the Seismological Society of America. Vol. 63, No. 3, pp. 937-958. June 1973
PREDICTION AND SUPPRESSION OF LONG-PERIOD NONPROPAGATING SEISMIC NOISE
BY ANTON ZIOLKOWSKI
ABSTRACT
Approximately half the noise observed by long-period seismometers at LASA is nonpropagating; that is, it is incoherent over distances greater than a few kilometers. However, because it is often strongly coherent with microbaro- graph data recorded at the same site, a large proportion of it can be predicted by convolving the microbarogram with some transfer function. The reduction in noise level using this technique can he as high as 5 db on the vertical seismometer and higher still on the horizontals. If the source of this noise on the vertical seismogram were predominantly buoyancy, the transfer function would be time-invariant. It is not. Buoyancy on the LASA long-period instruments is quite negligible. The noise is caused by atmospheric deformation of the ground and, since so much of it can be predicted from the output of a single nearby microbarograph, it must be of very local origin. The loading process may he adequately described by the static defor- mation of a fiat-earth model; however, for the expectation of the noise to be finite, it is shown that the wave number spectrum of the pressure distribution must be band-limlted.
An expression for the expected noise power is derived which agrees very well with observations and predicts the correct attenuation with depth. It is apparent from the form of this expression why it is impossible to obtain a stable transfer function to predict the noise without an array of mierobarographs and excessive data processing. The most effective way to suppress this kind of noise is to bury the seismometer: at 150 m the reduction in noise level would he about 10 db.
INTRODUCTION
It has been known for some time that the noise recorded by long-period seismometers is composed of two parts: propagating noise, so-called because it is coherent over dis- tances of at least 100 kin, and nonpropagating noise, so-called because it is incoherent over distances greater than a few kilometers. Because the long-period seismometers at the Montana Large Aperture Seismic Array (LASA) are placed so far apart, the non- propagating component of the noise appears to be spatially disorganized. It has been shown by Haubrich and Mackenzie (1965) and Capon (1969) among others, using coherence spectra, that the nonpropagating component of the noise is correlated with microbarograph recordings at the same site at times when this component is significant. Since this component contributes at least 40 per cent of the noise up to 50 per cent of the time at LASA (Capon, 1969), it seemed worthwhile to consider the possibility of eliminat- ing it using the knowledge that the output of a given seismometer will be correlated with the output of a nearby microbarograph.
The process of forming a coherence spectrum is a linear one, a coherence spectrum being the amplitude spectrum of a cross-correlation function. Any coherence in the frequency domain indicates that part of one time series is linearly dependent on the other time series. This is not to say that the physical process which relates the two time series is linear, merely that there is a linear component which, therefore, can be removed with a linear time-domain filter. If the physical process relating the two series & linear, it is
937

938 ANTON ZIOLKOWSKI
possible to predict with any accuracy one wants the part of one time series which depends on the other time series.
THE PREDICTION PROCESS
We can divide the seismometer output as a function of time, S(t) , into two parts: the part, N(t) , which is correlated with the microbarograph output and, therefore, caused by local pressure fluctuations in the atmosphere; and the other part, E(t), not correlated with the microbarograph output, and, therefore, containing any signals and noise caused by all other uncorrelated effects. Thus
S(t ) = N(t) + E(t) . (1)
It is possible to define an atmospheric pressure fluctuation, P'(t) , in the vicinity o f the seismometer and microbarograph which would produce a unit positive impulse at time
I P'(t) ~h
I
t = O I
Microboro(::jrap~ - I
t 4
e ~ Zlt) Seismomet =
t (o) t =o
I I )
P'(t) I I I
t=O I I
Microbarograp~ = [
t 4
e r ~ ~ I(t-r) Seismomet
t t Produces Artificial t = 0 Delay of T
(b)
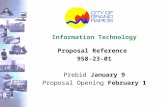
FIG. 1. (a) A possible situation if the microbarograph impulse response is minimum-delay: the postulated pressure fluctuation P'(t) produces a spike at time t = 0 in the microbarograph.output and some response I(t) in the seismometer output. (b) If the microbarograph impulse response is not mini- mum-delay, P'(t) can be devised so as to produce an almost perfect spike at time t = z in the micro- barograph output; the consequent output l(t) in the seismometer can be artificially delayed by an amount "t ' .
t = 0 in the output of the microbarograph, and some other respofise,/(t) , in the output o f the seismometer (see Figure la). This postulated pressure fluctuation, P'( t) , is the inverse of the microbarograph impulse response and is strictly realizable, in the sense that it does not exist before t = 0, only if the microbarograph impulse response is minimum- delay (see, for example, Robinson, 1967). In practice it is possible to obtain as good an

L O N G - P E R I O D N O N P R O P A G A T I N G S E I S M I C N O I S E 939
approximation as is desired to the inverse ofa nonminimum-delay response by introducing a sufficiently long delay, z, into the output so that the impulse appears at time t = t. Of course, now it is impossible to derive a causal relationship between the microbaro- graph output, M(t), and the correlated noise component, N(t), without also introducing an artificial time delay of at least v into the output of the seismometer (see Figure lb). Thus, allowing for these delays, we may write
N(t) = ~ ~ M(~) I ( t - ~)d~. . (2)
If we define the cross-correlation function to be
~bAdl ) = lira ~ B(t- l )dr , (3) T-+oo
we can obtain the cross-correlation, qSSM, of the seismometer output with the micro- barograph output
1 r CsM(S) = lira ~ j" r { j ' ~ M ( ~ ) I ( t - ~)d~}M(t-s)dt
T -.'-co
1 r + lim ~1" TE(t)M(t-s)dt , (4)
T ---~oo
using equations (1) and (2). From the definition of E(t) we see that the second integral in equation (4) must be zero for all values of s, and by making the substitution q = t - ~ - s the first integral can be transformed to give
Cs~(s) = f~ ~ ¢ ~ ( ~ ) I ( ~ +s)d~. (5)
For digital data this equation can be written as
qbsM(s)= ~ Cl)mm(q)I(q+S) (6) r / ~ -- o0
for all integer values of s, where
1 T qbA~(l ) = lira ~ A(t)B(t- l ) .
T ~oo 2T+ 1 t = - r
In practice S(t) and M(t) are series of finite length, say N points, and the transfer function I(t) is a transient which needs to be computed for only n points. In this case equations (6) become
n - I
Osm(S) = ~ q~mr~(r/)l(r/+ s), s = 0, l ..... n-- 1 (7) I / = 0
where Cl)sm(S ) and @uu(q) can be estimated using the equation
1 N - I/I *An(l) -- N- I l l t~o A(t)B(t-l) (8)
(Blackman and Tukey, 1958). Negative values of r/need not be included in equations (7), for ~MU(r/) is a symmetric function and I(t) is zero for negative values of t. Equations (7) are the well-known system of normal equations and can be solved efficiently for I(t) by Levinson's method (1949). Having obtained an approximation to I(t) (the quality of the approximation depends on the quality of the estimates of (I)su and ~MM and improves with any increase in the number of points, n, for which I(t) is computed), we can compute an approximation to N(t) using equation (2) and subtract this from the seismic signal,

940 ANTON ZIOLKOWSKI
S(t), to obtain an approximation to E(t) which should now have a better signal-to-noise ratio than S(t).
It may be worth noticing that there is nothing inherent in this process which confines its application to the prediction and removal of pressure effects in seismic data. Whenever one time-dependent quantity is a linear function of some other time-dependent quantity, the dependence can be determined. This technique could be used, for example, possibly with great advantage, to remove both temperature and pressure variations from earth- strain records. Some care would have to be taken, when removing more than one effect, to remove any linear dependence of the second process on the first.
AN EXAMPLE
The above technique was applied to a noise sample beginning at 17h 20m 00s on August 23, 1967, recorded on the 3-component long-period seismometer at A0 at LASA. Capon (1969) showed for this sample that the nonpropagating component contributed nearly 10 db more to the noise measured by the vertical seismometer in the 20- to 40-see period range than did the propagating component. At this time, there were two micro- barographs operating at A0, one with a wind filter on the input and one without. The wind filter has the effect of removing all frequencies in the seismic band out of the micro- barograph data and, for the purposes of demonstrating the use and validity of the above technique, adulterates the data sufficiently to render it entirely useless. All calculations, therefore, were performed on the "uncensored" data obtained with the naked micro- barograph.
Figure 2 shows the autocorrelation function, qbMM(t ), the cross-correlation function, ¢bs~t(t), and the transfer function I(t) with the artificial time-delay z, for each of the com- ponents, (a) vertical, (b) north-south and (c) east-west. Figure 3 shows the microbaro- graph output (1), the seismometer output (2), the predicted noise (3), and the seismometer output with the predicted noise subtracted (4), for each of the three seismometer com- ponents. It is clear that a considerable reduction in noise level has been achieved. The gain in the process, in reducing trace 2 to trace 4 in Figure 3, is shown in Figure 4 in db as a function of frequency for each seismometer component, the peak gain in each case being at about 40 sec. No special significance should be attached to the figure of 40 sec. Under different weather conditions we would not necessarily expect the noise to peak at the same frequency.
To demonstrate that all of the seismic noise linearly related to the microbarograph out- put has been removed, spectra are shown in Figure 5 of the coherence between the microbarograph and seismometer outputs (1), and the microbarograph output and the seismometer output with the predicted noise subtracted (2), for the three seismometer components. We can see that the measured coherence (2) in each case in Figure 5 indicates with 95 per cent confidence that everything in the seismometer output which was coherent with the microbarograph output has been eliminated.
THE COUPLING PROCESS
It is of some interest to try to understand the physics of the coupling between the atmosphere and the seismometer. It could be argued that the understanding is not really required because the linearly-related component can be removed by filtering; all that is required is to determine how linear the process is. However, it may be cheaper and simpler to reduce the noise by a more careful isolation of the instrument, if that is all that is required, rather than to install microbarographs and do processing. Therefore, if the

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 941
I (o) t=o
r Vertical
T
~SM(t)
I ( t )
I I I
(b) ~-0
North-South
<~MMlt)
I(t)
J r I
(c) t = O
I East-West
-200 -100
<]~SM(t)
I(t)
I I 100 200
TIME, t (sec)
I - -
3 0 0 4 0 0
Fig. 2. The autocorrelation function, ~MM(t), of the microbarograph output, the cross-correlation function, ~su(t), between the seismometer and microbarograph outputs and the transfer function, l(t), derived from equations (7) for (a) vertical, (b) north-south and (c) east-west components.

(2)
(3) ~
(4) (o1 Vertical Component
i Fb°r
o m ~
t 2 0 0
00 rap.
(2)
(3)
(4)
(b) North-South Component
i p.bor
00 m~
t 1000
1000
( f ) /~bor
,ooo
- t 0 0 0
(3) ~ ' ~ ~ / ~ / ~ / ~ / g A ~ ~ ~ / / / ~ ¢/- 50O mF 0 fO00
(4) ~ / ~ / V ' v ~ ~ J ~ / ~ ~ [~AV - 5oo inF. " ' ' V ~ 'J
(c) East-West Component _ 0 [ I I I l n I L I J I o 2 4 6 8 iO
TIME (rain) FIG. 3. Data from LASA site AO beginning 17h 20m 00s on August 23, 1967. For each of the three
components of the seismometer, (a) vertical, (b) north-south and (c) east-west, are shown the seismometer output (2)~ the predicted noise in that output (3), and the seismometer output minus the predicted noise (4). In each case (1) is the microbarograph output at Ag.

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 943
m
v 6
Z 0 F-
123 b.I fie
LO 4 O3 m
o z
t 8
/ !
2 /
(b) N o r t h - S o u t h
(c) East -West
(a ) V e r t i c a l
~_ Signa~ Band ~
0 i l , 1 r i ,Jl i , i
0.01 0 . 0 5 O.l 0.5
F R E Q U E N C Y ( H z )
FIG. 4. The gain in noise reduction in db as a function of frequency in converting trace (2) to trace (4) in Figure 3 for each seismometer comoonent.
t . 0 " l I r I I I I I ~ I [ I l r I
[ ~ Signal | I Signal l ~ ~l Band
o.e/ --'1 Band I ' - - / _
0.6 ~ _ t _ t 0.4
I
0.01 (3.1 0.01 0.1 0.0t 0.1 FREQUENCY (Hz) FREQUENCY (Hz) FREQUENCY (Hz)
(a) Vertical Component (b) North-South Component (c) East-West Component Fig. 5. From the data shown in Figure 3 are the computed coherencies between the microbarograph
and seismometer outputs (1) and the microbarograph output and seismometer output minus the predicted noise (2) for each seismometer component, (a) vertical, (b) north-south and (c) east-west. There is at least 95 per cent confidence associated with any coherence above 0.3.

944 ANTON ZIOLKOWSKI
coupling process is understood, the best method of reducing this kind of noise can be determined.
There are two ways in which variations in atmospheric pressure can produce responses in a seismometer: via buoyancy in the instrument, and by elastic deformation of the ground which is then measured in the usual way. As it happens, the buoyancy effects on the Montana LASA long-period instruments are absolutely negligible. This can be shown by a variety of techniques.
The first indication that the measured noise is not buoyancy is that it shows up as strongly on the horizontal instruments as it does on the verticals. The horizontal instru- ments cannot respond to changes in atmospheric pressure unless these give rise to tilts in the ground. In any case, great care was taken at LASA in the installation of the instruments to isolate them from any possible buoyancy effects.
Each of the three long-period seismometers at every subarray site at LASA is housed in a case. For vertical seismometers, this case has an air-tight seal, the case then having a time constant of at least 8 hr for pressure variations; in addition, all three cases are en- closed in a sealed vault which has a time constant of the order of 40 rain (Gudzin and Hennen, 1967). Therefore, any atmospheric pressure fluctuations of the order of 40 sec would be so severely attenuated by this protection that any resultant instrumental buoyancy would be undetectable. The crucial experiment to verify this was performed by Gudzin (1972) when employing identical seismometers in setting up the Tonto Forest Observatory. A vertical long-period instrument in its sealed case was put in a room which was subjected to internal pressure variations of 1 mbar amplitude; no motion in the seismometer was detected. Since the maximum 40-sec atmospheric pressure fluctuations are expected to be only of the order of 100 pbar we would, therefore, expect to be able to rule out buoyancy as a means of coupling.
Finally, if the predictable portion of the noise shown in Figure 2 were predominantly caused by buoyancy in the seismometer, and if the impulse responses of the microbaro- graph and the seismometer remained stable, one would expect that the transfer functions, I(t), calculated for the noise samples shown in Figure 3, would serve equally well to predict the nonpropagating component of the noise on some other day when that com- ponent was again dominant. That the application of the previously computed transfer functions to the output of the same microbarograph at A0 to predict the noise in the same seismometers at A0 did not prove successful (see Figure 6) for data which Capon (1969) had shown to have a large nonpropagating component is confirmation that buoy- ancy, at A0 at any rate, is quite negligible. We are thus forced to conclude that the observed noise is caused by atmospheric deformation of the ground.
Since the nonpropagating noise is incoherent over distances greater than a few kilo- meters, we might expect the source of such noise to have a coherence distance of the same order. Herron et al. (1969) have shown that the coherence of background atmospheric pressure fluctuations decreases approximately as the logarithm of distance for period bands of 8 to 64 min, the coherence increasing with increasing period. Since a significant coherence at 8-min period was obtained by Herron et al. (1969) only at distances less than 3 kin, we can assume that the coherence distance, the maximum distance at which there is significant coherence, for periods of the order of 40 sec is substantially less than 3 km. Herron et al. (1969) have also shown that there is a very strong correlation, greater than 0.8, between the wind speed, averaged over a given period, and the power density of pressure fluctuations between 10 and 50 sec during that period. The resulting picture of atmospheric pressure disturbances is one of turbulence: the local pressure pattern, referred to a tYame of reference moving relative to the ground at the average wind speed, changes substantially in the time it takes the reference frame to move a distance greater

(~)
(2)
(3)
(4)
(~)
(2)
( 3 )
( 4 )
( t )
4 __1205 p, bar
(a) Vertical Component
-5O
~ 2 5 ~ b a r
0 100o
500 m/~
0 -~ t000
(b) North-South Component
50
{2) , . I 0 0
( 4 ) m/a.
(c) East-West Component
I J I I ~ M t I i ,r I 0 2 4 6 8 10
TIME (rnin) FIG. 6. Data from LASA site A0 beginning 19h 50m 00s on July 1, 1967. As in Figure 3, for each of
the three components of the seismometer, (a) vertical, (b) north-south and (c) east-west, are shown the seismometer output (2), the predicted noise in that output (3), and the seismometer output minus the predicted noise (4). In each case (1) is the microbarograph output, but the predicted noise has been calculated using the transfer functions shown in Figure 2.

946 ANTON ZIOLKOWSKI
than the coherence distance--typically somewhat less than 3 km for periods of the order of 40 sec.
In the example given above, a large proportion of the noise was found to be predictable from a single microbarograph located near the seismometer. Since we have concluded that the noise is caused by atmospheric ground loading and since the microbarograph measures atmospheric pressure variations coherent only within 3 km or less, we deduce that most of the observed nonpropagating noise is of very local origin, that is, generated by pressure variations within 3 km or less.
ESTIMATION OF NOISE POWER
Given this situation, we may try to describe it with a simple model of the Earth. It is clear that the curvature of the Earth is irrelevant to this problem, so we may approximate the Earth by a homogeneous elastic half-space. Possibly, it would be an improvement to consider a multilayered half-space; but this will not be done here, partly because the author would like only to arrive at some qualitative understanding of the problem and some order of magnitude answers, and partly because it is quite beyond either his enthu- siasm or capability to do so. Wind speeds are two or three orders of magnitude less than the speeds of seismic waves; we therefore incur negligible error in considering the atmospheric deformation of the ground as a problem in statics. Only the vertical com- ponent of displacements in response to normal stresses on the surface will be considered; effects such as the wind blowing on trees and other obstacles which can produce displace- ments are ignored.
We may use the Green's function given by Landau and Lifshitz (1970) to find the vertical displacement, u~(0, 0, z), at the point (0, 0, z) in the medium
f ~ fo~ l + v I 2 ( l _ v ) z 2 1 u,(O, O, z) = _ ~ _ oo-2~-E r + • P(x, y)dxdy , (9)
where the surface of the half-space is the xy plane, z is positive into the medium, v is Poisson's ratio, E is Young's modulus, P(x, y) is the pressure distribution and r = (x 2 +y2 +z2)1/2. If we assume that P(x, y) is a stationary, white, random, two-dimensional noise function whose autocorrelation is, therefore, a delta function, we can find an expression for the expectation of uz 2 (see Appendix 1)
E{uZ} =2r c ~°° F k, t- kzz2 | q2 RodRo , (1 O) Jo L(Ro ~ Uzb'/~ (Ro ~ + zb ~ ]
where k s = (1 - v2)/xE and k 2 = (1 + v)/2rtE. This integral diverges at the upper limit for any finite value of z and diverges at the lower limit when z --- 0. This means that we would expect to get infinite noise from such a model. Since infinite noise is not observed, something must be wrong with the model.
Other workers who have tried to estimate the power of the noise by atmospheric loading of a half-space have also arrived at solutions which blow up in this way. Haubrich (1970), for example, estimates the noise at the surface of an infinite half-space by dividing the surface into an infinite number of segmented concentric rings, each segment having the same area, and then adding up the contributions from all the segments. The atmos- pheric pressure acting on a given segment is assumed to be uniform and to vary with time independently of the pressure on any other segment, the power of the variations over each segment being the same. Instead of having to evaluate an integral which does not converge, Haubrich finds he has to sum a series which does not converge. Undeterred,

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 947
he explains, "it doesn't diverge very fast," and includes only the inner 1,000 rings, thus ignoring the remainder which unfortunately contribute infinitely more to the calculated noise than the ones he includes. By taking an estimate of u~ 2 from observations, he deduces the segment size.
Savino et al. (1972) have made improvements to Haubrich's model by including depth dependence. They estimate the segment size from measurements of coherence of earth noise and then adjust the number of rings to force the calculations to agree with observa- tions. They, too, igriore all the segments in rings beyond a certain radius which would, if included, contribute infinitely more to the calculated noise than the ones they choose to consider.
In an entirely different approach, Sorrells (1971) assumes that the wind-induced pressure field is a plane wave which propagates at wind speeds. His model, therefore, does not allow for any decay of coherence with distance perpendicular to the direction of propagation. However, Sorrells's solutions for the displacements at a given frequency (equations 21 and 22) do show that the displacement will become infinite at any depth whenever the frequency is zero. This is exactly the same as including the zero-wave number component in statics.
Consider a 2-dimensional static sinusoidal pressure distribution, rr~z, on the surface of the half-space, where
a ~ = P cos (2n~x) cos (2rq~y) (11)
and c~ and ( /are wave numbers. The vertical displacement, u~, at a depth z is given by Fung (1965)
a ~ [2(1- v)+27rcz]e -2~c~ (12) uz = 4rc/~c
where p is the rigidity of the half-space and c = (~z+f12)i/2. The vertical component of the strain, @(u~)/#z, at a depth z, is
c3(u~) _ a ~ (1 -2v+2~cz)e-2=cL (13) c3z 2p
When the wave number, c, is zero, the vertical component of strain, @(uz)/#z, is constant right to the bottom of the half-space. But there is no bottom to the half-space. Therefore, the integral of the strain, u~, is infinite. If we had been using a spherical earth model this would not have happened. However, since the observed noise is generated so locally that the curvature of the Earth must be irrelevant to the problem, we must filter out this impermissible d.c. component.
The divergence of the integral in equation (10) at the lower limit when z = 0 is caused by the inclusion of point forces. If we let P(x, y) in equation (9) become P~5(x)5(y), a point force at the point (0, 0, 0), we obtain for the displacement
(1 + v) ( 3 - 2 v ) P ~ , (14) U z - 2~E z
which is infinite when z = 0. By defining the autocorrelation function of P(x,y), E{P(Xl, Yl)P(x2, Y2)}, to be equal to the delta-function PZ@(x~-x2)6(y~-yz), we are specifying that the pressure distribution be a stationary, white, random distribution of point forces with zero mean. Every point at the surface of the half-space, therefore, expects to be sitting under a point force. If we disallow point forces, which are not physically realizable, by filtering out the infinitely large wave numbers, we can avoid the divergence which occurs in equation (10) at the lower limit of the integral when z = 0.

948 ANTON ZIOLKOWSK!
It should be noticed that Haubrich's approach of dividing the surface of the half-space into cells of equal area each subjected to an independent uniform pressure load is equivalent to low-pass filtering the pressure distribution in wave number space.
The spectrum of atmospheric pressure variations rises at approximately 7 db/octave toward the long periods (Gossard, 1960). Herron et al. (1969) point out that these long- period variations generally travel at about the same speed as the frontal movement of storms (10-15 m/sec). Therefore, the wave-number spectrum of these variations rises at about the same rate toward the long wavelengths. Farrell (1972) has shown that the
t000
" t 0 0 0
0 E t,-
0
E
E
I.i.I Q
_.1
t . 0 - - -
o.t I o.oot
I L I I I L I I I I i i l l 1 1 L i 0.01 0.t
FREQUENCY (Hz)
I [ t L h l t.0
FIG. 7. Long-per iod system transfer function.
Green's functions for the loading of a homogeneous elastic sphere, in the limit of de- creasing distance from the load, reduce to the solutions for a point load on a homogeneous elastic half-space. He also shows that, close enough to the point load, a layered earth model responds in the same way as a homogeneous sphere that has the properties of the topmost layer. In order to justify our use of the half-space model to describe the loading process, therefore, we must be convinced that the long-wavelength atmospheric pressure disturbances do not produce observable nonpropagating seismic noise and can be filtered out of the solution. It can be seen from Figure 7 that the LASA long-period instrument response falls off at approximately 20 db/octave. Since the nonpropagating noise can be rising at only about 7 db/octave, the sensitivity of the seismometer to this kind of noise is decreasing at about 13 db/octave. It is permissible, therefore, to use a

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 949
half-space model to describe the atmospheric loading process provided the long- wavelength disturbances, which do not contribute to the noise, are filtered out of the calculations.
To avoid the convolution integrals which would arise from attempting to band-pass filter the Green's function, we will consider the problem in wave-number space (Appendix 2). The d.c. component is removed by application of a filter of the form [1-e-~C], where e is the wave number, and the point forces are removed by application of a filter of the form e-~L These filters have been chosen for convenience (they lead to simple integrals) to demonstrate the necessity for band-limiting the wave-number spectrum; slightly different answers would doubtless be obtained with equally arbitrary, less con- venient filters which have different cutoff characteristics. With this approach we find the expectation of u~ 2 to be (see Appendix 2)
= [(1 - v a) / i + 2fez(1 - v)I2+nZzZI3] (15)
where , [-4(2rcz + r/) (y + 2az + r/)- 1
Z'=--'Oge L J' y z
[== 2(2fez + q) (7 + 4rcz + 2q) (Y + 2rcz + ~/)'
y2 [Tz + 6y(2rcz + r/) + 6(2ztz + r/) 2 ]
I3 = 4(2zrz + r/) 2 (7 + 47rz --k 2q) z (Y + 21rz + q)z
and p Z is the mean-square pressure deviation per unit wave number squared. From equation (15) we see that I 1 becomes infinite if 7 is infinite or if q and z are both zero. In other words, the expectation of u~ 2, E{Uz2}, is finite providing the d.c. term and point forces are eliminated.
Let us now consider the estimation of u= 2 at the surface of a half-space for realistic data. Equation (15) becomes, for z = 0
E{U 2} = Pt 2( 1 - v2) log e F4r/(7 + r/)-] 27r / , z L( 7 j j. (16)
In this equation we can replace P1 z by pZ. 2z, where pZ is the mean-square atmospheric
pressure deviation and 22 is the mean-square wavelength of the atmospheric pressure distribution. In reality, however, we are not dealing with a static situation: uz, P and 2 are time-dependent quantities. Nevertheless, we may still find this formula satisfactory if we are prepared to make some more assumptions. We have already noted the high correlation, observed by Herron et al. (1969), between the wind speed averaged over a given period and the power density of pressure fluctuations between 10 and 50 sec during
that period. This suggests that we could replace 22 by V 2 T 2, where V 2 is the mean-square wind speed and T is the period at which there is maximum coherence between the seismometer and microbarograph outputs. If we further assume that the power of the pressure fluctuations at any point averaged over time is the same as the power of the
pressure fluctuations at any time averaged over space, we can replace p2 by P2(t). Equation (16) then becomes
E { u 2 ( t ) } = p2(t) . V2(t). TZ(1 - v2), [4q(y + q)~ (17)

950 ANTON ZIOLKOWSKI
We can test this formula using the data from the example used above. Estimates of
u~a(ti, p2(t) and V2(t) were made using the formula
a2(t ) = I r a2(t) d t , (18) Jo z
where ~ was about 2 hr 20 rain. T is taken to be the peak in the coherence spectrum between the vertical seismometer and the microbarograph. ~/and V are the shortest and longest wavelengths which contribute to ob~rvable noise on the vertical seismometer and were estimated in the following way. The smallest and largest periods to which the seismometer can respond were chosen to be those at which the sensitivity of the instru- ment is down a factor of 10 from the peak. These periods are about 9 and 80 sec (see Figure 7). t /and y are then assumed to be equal to these periods multiplied by the lowest and highest recorded wind speeds, 5 and 10 m/sec, in the time period T. So t/ = 45 m and ~ = 800 m. This is not inconsistent with the measurements of coherence made by Herron et al. (1969). From Landers (in preparation) measurements of P- and S-wave velocities in the sediments at LASA, Poisson's ratio, v, is estimated to be about 0.3 and # is estimated to be about 3.5 x 10 ~° dyne cm -2. Using equation (18), the following
estimates were made: p2(t) = 62.6 dyne 2 cm-4; V2(t) = 37 m 2 sec -2 Inserting all these numbers into the right-hand side of the formula 17 and taking
T = 40 sec from Figure 5, we find E{uz 2} = 723 x 10 -18 m 2. From equation (18) and the seismometer output we find u~ 2 = 764 x 10-~8 m 2.
The agreement between the estimated and observed noise is obviously too good to be true. Uncertainties exist in the estimates of v and # (Landers, in preparation) which may affect the result by a factor of 2; the logarithmic factor is somewhat arbitrary in that it is derived from arbitrary assumed filters. It should also be remembered that some of the noise measured is propagating noise. However, for this sample of data, Capon (1969) showed that the nonpropagating component contributed nearly 10 db more in the 20- to 40-sec period band than did the propagating component; therefore, only about 70x 10 -18 m 2 of the observed noise can be propagating. The formula will probably hold good within less than an order of magnitude.
It is interesting from a practical viewpoint to find how much improvement could be obtained by burying the seismometer. Making the same assumptions as for the case of z = 0 above, equation (15) becomes
PZ(t). V2(t). T 2 E{u}} = 27r# z [(1 - v2)Ix + 2~zz(1 - v)I 2 + 7rZzZlal . (19)
Figure 8 shows E{u= z} plotted as a function of z using the same data for Pa(t), I~2(t), etc. as above. It would seem from this example that the noise-power of this particular nonpropagating noise, generated by atmospheric pressure disturbances with wavelengths of the order of 45 to 800 m, could have been reduced an order of magnitude by burying the seismometer 150 m.
Sorrells et al. (1971) describe a very careful experiment to measure noise caused by local atmospheric pressure changes. The two 3-component seismometers, one at a surface site and one buried 183 m in a salt mine, were completely isolated from any measurable buoyancy effects. During calm periods the noise spectra of the two vertical instruments are virtually identical. During a windy period when the rms pressure fluctuation was 12 #bars and the mean wind speed was 7.8 m/sec the noise level in the surface instru- ment increased by 10 db in the 20- to 100-sec band, whereas that in the mine instrument remained the same. This noise condition is approximately the same as in the example

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 951
used throughout this paper; in particular, the wavelengths of the pressure distribution are about the same--perhaps a little longer. Figure 8 predicts that at 183 m, one would expect to get a little over l 1 db decrease in noise level. The results of Sorrells et al. (1971) thus add some independent confirmation of the validity of equation (19).
t000
~00
04
la.I
t0
I ~ I I I I I I I I I 0 200 4 0 0 6 0 0 8 0 0 ~000
50
m
b
u
i
i
i
1 o 12oo
20 °J::l.. E
W >
_J W i1-
~0 co " 1 0
DEPTH OF BURIAL, z(m)
Flo. 8. E{u}z ~ calculated f rom equat ion (19) as a funct ion o f z using the following data: P2(t) = 62.6 dyne2cm-4 ; V2(t) = 37 m 2 s - 2 ; T = 4 0 s ; / 1 --- 3 .5× l0 t° dyne c m - 2 ; v = 0.3; r /= 4 5 m ; ), = 8 0 0 m .
A N IMPROVED PREDICTION TECHNIQUE?
Equation (19) shows clearly why the transfer function, I(t), found for the example described above was not suitable for predicting the noise in a later sample of data: the relationship between P(t), the atmospheric pressure, and u(t), the displacement caused by atmospheric deformation of the ground, is not constant. There is a time-dependent weighting factor which depends on wind-speed, V(t), and period at which the noise peaks,
T. In fact, the weighting factor will depend on 2(t), the rms wavelength present at time t.
However, if one makes the first-order assumption that 2(0 is proportional to V(t) for a
narrow-band seismometer, (obviously 2(0 is independent of the seismometer character- istics, but the wavelengths which can cause observable noise do depend on the seismo- meter) and, if one also assumes that any one point at the surface is as good as any other for measuring V(t), one might just expect to do a little better with the prediction technique by weighting the microbarograph output, M(t), with the anemometer output, A(t), at the same site. Of course, the responses of the microbarograph and anemometer are entirely different; therefore, the two time series M(t) and A(t) would have to be decon- volved to remove the instrument responses and get back to the inputs P(t) and V(t).

952 ANTON ZIOLKOWSKI
This argument may seem a little tenuous. After much experimentation with the data and showing that careful weighting of the deconvolved microbarograph output with the deconvolved anemometer output produced a time series which was no improvement over the original, unadulterated, microbarograph output, the author has reluctantly come to the conclusion that this argument is, indeed, tenuous, if not erroneous. If one had an instrument which measured wavelength as a function of time, 2(t), the conclusion might have been different. To obtain estimates of 2(t)would require an array ofm icrobarographs.
CONCLUSION
Although on some occasions, a large proportion of the nonpropagating noise observed on a long-period instrument at LASA is strongly coherent with the output of a nearby microbarograph and can, therefore, be predicted and eliminated, the transfer function which converts the microbarograph output to the predicted noise is not a stable function of time and must be calculated anew everytime. Attempts at stabilizing the transfer function by weighting the deconvolved microbarograph output with the deconvolved anemometer output at the same site have failed.
Several lines of argument, in particular the lack of stability of the computed transfer function over time, indicate that the noise is caused by atmospheric deformation of the ground and not buoyancy in the seismometer.
Most of this nonpropagating noise appears to be generated very locally--within 3 km or less of the seismometer--by pressure disturbances in the atmosphere moving at the ambient wind velocity. The process can, therefore, be described approximately using a half-space model for the Earth and static loading theory. In order to keep the calculations in accordance with observations, the wave-number spectrum of the pressure disturbances must be band-limited. The model may then be used to derive a formula, equation (19), for the estimation of the noise power produced by such band-limited pressure disturbances which agrees well with observations. The decay of this noise with depth predicted by the model agrees very well with independent measurements made by Sorrells et al. (1971).
There would have been some future in predicting and eliminating this noise using the theory presented in the section on the prediction process in this paper had it been possible to obtain a stable transfer function. Since this appears to be out of the question, due to the turbulence of the fickle wind, there remain two ways of suppressing this kind of noise. One method is to bury the seismometer at a depth of 150 m, where the reduction in noise level should be about 10 db. The other method is to employ an array of seismometers placed no closer together than 1 km. To achieve the same reduction in noise level as would be obtained with a single buried instrument would require 10 surface instruments.
ACKNOWLEDGMENTS
I have been fortunate in having had the benefit of many useful suggestions and helpful criticism from staff members of the Seismic Discrimination Group of Lincoln Laboratory. In particular, I would like to thank Dr. John Filson, Dr. Clint Frasier, Dr. Bruce Julian, Dr. Richard Lacoss and Dr. Tom Landers.
REFERENCES
Abramowitz, M, and I. A. Stegun (1964). Handbook of Mathematical Functions, U.S. Dept. of Commerce National Bureau of Standards Applied Mathematics Series 55.
Blackman, R. B. and J. W. Tukey (1959). The Measurement o f Power Spectra, Dover Publications, New York.
Bracewell, R. (1965). The Fourier Transform and Its Applications, McGraw-Hill, New York,

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 953
Capon, J. (1969). Investigation of long-period noise at the Large Aperture Seismic Array, J. Geophys. Res. 74, 3182-3194.
Fung, Y. C. (1965). Foundations of Solid Mechanics, Prentice-Hall, Englewood-Cliffs, New Jersey. Gudzin, M. G. (1972). Private communication. Gudzin, M. G. and F. M. Hennen (1967). Final Report, Project VT/6701 LASA LP System. Geoteeh
Report No. 67-17. Haubrich, R. A. (1970). The origin and characteristics of microseisms at frequencies below 140 cycles
per hour, Mono de I'UGGL Haubrich, R. A. and G. S. MacKenzie (1965). Earth noise, 5 to 500 millicycles per second, 2. Reaction of
the Earth to oceans and atmosphere, J. Geophys. Res. 70, 1429-1440. Herron, T. J., I. Tolstoy, and D. W. Kraft (1969). Atmospheric pressure backround fluctuations in the
mesoscale range, J. Geophys. Res. 74, 1321-1329. Landau, L. D. and E. M. Lifshitz (1970). Theory of Elasticity, Pergamon, Elmsford, New York. Landers, T. E. (Paper in preparation). Levinson, N. (1949). The Wiener rms error criterion in filter design and prediction. Appendix B of
Wiener, N., 1949 in Extrapolation, Interpolation and Smoothing of Stationary Time Series, Wiley, New York.
Robinson, E. A. (1967). Statistical Communication and Detection with special reference to Digital Data Processing of Radar and Seismic Signals, Griffin, London.
Savino, J., K. McCamy, and G. Hade (1972). Structures in earth noise beyond twenty seconds--A window for earthquakes, Bull. Seism. Soc. Am. 62, 141-176.
Sorrells, G. G. (1971). A preliminary investigation into the relationship between long-period seismic noise and local fluctuations in the atmospheric pressure field, Geophys. J. 26, 71-82.
Sorrells, G. G., J. A. McDonald, Z. A. Der, and E. Herrin (1971). Earth motion caused by local atmos- pheric pressure changes, Geophys. J. 26, 83-98.
LINCOLN LABORATORY MASSACHUSETTS INSTITUTE OF TECHNOLOGY LEXINGTON, MASSACHUSETTS 02173
Manuscript received October 13, 1972
APPENDIX 1 Estimation of Noise Power Using the Green's Function
The vertical displacement, uz(O, O, z), at the point (0, O, z) in a half-space subjected to a pressure distribution P(x, y) is given by
f~ f °° l+v[-2(1-v) z 2 q _ ~ -~ u~(0, 0, z) = L ~ - + r ~ J P(x, y)dxdy, (A1)
(Landau and Lifshitz, 1970), where the surface of the half-space is the xy plane, z is positive into the medium, v is Poisson's ratio, E is Young's modulus and r = (x 2 +y2 + z2) 1/2. We can immediately write down the expectation of Uz 2
where
k 1 = (1 - v2)/~zE, k2 = (1 + v)/2~zE,
r I = (x12+y12+z2) ~ and r2 = (x22+yz2+Z2) W2. (A2)

954 ANTON ZIOLKOWSKI
In equation (A2) the only quantity on the right-hand side which is not deterministic is [P(xl, Yt) P(x2, Y2)]- We can rewrite this equation, therefore, as
E(uz2} = Ioo foo f~o fro (kl..t k2z2~(kl k2z2\ -o~ -oo -oo -~ \171 ~1 f j \ r2+~23 ) E{P(xl 'yl) P(X2'y2)}dXldyldX2dy2"
(A3)
In this equation E{P(xl,yl)P(x2,Y2) ) is the autocorrelation function of P(x,y) in two dimensions. If we assume that P(x, y) is a stationary, white, random, 2-dimensional noise
function we can then define E{P(xl, Yl)P(x2, Y2) } = P2t~(xl-x2)6(yl-y2). In other words, the autocorrelation of P(x, y) will be a 2-dimensional delta-function. It is now convenient to change coordinates. Let
X' -- x l - -X2 y, _ Yl--Y2 2 ' 2 '
Xl -I-X2 Yl +Y2 X o - 2 , Yo = 2
Then
and
r 1 = [(Xo-}-x')2-k-(yo-}-y')2-kz2] 1/2, r2 = [(Xo -- x') 2 q- (Yo --2') 2 -1- z2] 1/2
(Relative coordinates)
(center of mass coordinates).
(~ ~ ~ ;~ /kl k2z2\/kl k2z2\_2 = - - + . w T - + .-TT 1-' E{u:2} J_ooJ_oJ_oJ_®t r' r, )trz r2 ) <$(x')8(y')dx'dy'dxodyo. (A4)
The integrals over x' and y ' vanish except for x' = 0 and y ' = 0. Therefore,
E{u, z) = foo_ oo,'- r°° oo\ (k-l+ro k'E~3~2P-Tro J dx° dY°' (AS)
where ro = (Xo 2 +Y0 2 "-I-Z2) 1/2.
We can now change to circular polar coordinates since we have circular symmetry. Let
Ro = (Xg'-[-y02) 1/2, 0=tan-a(Y--°~. kXo}
Then ro 2 = Ro 2 d-z 2
and f2.f [ k2z2 q2 e(u?) = Jo Jo L(go +(Ro 2 RodRodO
= 27z kz k z 2 -12 0 (Ro2+Z2)l/2+(Ro2+Z2)3~ R°dR° (A6)
APPENDIX 2
Estimation of Noise Power by Synthesizing Fourier Components
We can express the pressure distribution on the surface of a half-space as an infinitely broad spectrum of components of the form

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 955
azz(C~,//) = P~ (~, fl) cos (2gc~x + ~b, (c0) cos (2n//y + ~b2(/~ ) ) , (A7)
where c~ and fi are wave numbers and qS~ and @2 are phase angles which are functions of wave number. By following the same procedure as in Fung (1965), one can find the dis- placement response at a depth z to one component
u~(~,//) -- °'z~(~x' ~) [2(1--v)+2nCZ] e -zÈ~ , (A8) 4npc
where e = (cd +//2)i/2. The response to all components is therefore
f ~ i ~ a ~ ( ~ ' f l ) [ 2 ( l - v ) + 2 n c z ] e - 2 ' ~ C ~ d ~ d / / (19) u~ = 4 n / ~ - ~ - - o 0 - - ~
where the dimensions of Gz(~, fl), and, therefore, PI(~,//) are stress. length. All the wave numbers are included. It can be verified easily (see Appendix III), by setting PI(~, fl) to a constant and ~b 1 and ~2 to zero for all values o f~ and// , that equation (19) reduces to the Green's function when the pressure distribution is a point force.
We will now band-limit the wave-number spectrum using the filter (1 - e -~ ) to remove the d.c. component and the filter e - ~ to remove the point forces; ? and ~/are positive numbers. I f we then write the expression for G~ in exponential form, thus making Uz complex, we find the band-limited response
Uz = ~- ~ - ooPt (cq//)f(c) e zÈi(~x+/~y) e i(o' (') + ~ (~)) dc~d//, (A 10) where
[2(1 -v )+2ncz] [ 1 - e -re] e -2"cz e -"c . f(c)= 4ripe
We may now find the expectation of us 2 or uzu~*, where the asterisk(*) denotes complex conjugate. Thus
E{u~Uz*) = E{I~_o~I~_o~S~ ooI~_o~ Pl(~,, fll)P,(c~2, fi2)f(cl)f(c2)
x exp [2ni(~ix+flty-c~2x-fl2y)]
x exp [i(q51(cq)+q52(//0-qbl(e2)-~b2(f12)] dcqdBld~edB2}. (A1 1)
where cl = (cq 2 +//12) 1/2 and c2 = (~z 2 +//z2) 1/2. All the filtering is contained inf(cl) and f(cz). We can make an estimate of Gu~* by assuming that the pressure distribution at any time, before filtering, is a stationary white random noise, as in Appendix 1. We can achieve this situation by applying the following restrictions to parameters which depend on c~ and ]3-
We assume that P~(~,//) = / 1 , a constant, for all e and// . We assume that q51(c 0 is a white, random noise with zero mean which can take values
between - n and n; the probability that qS~ has a value between 0 and rio is equal to aO/2n.
We assume that q52(//) is another random noise with the same statistics as qS~(~). However, we further assume that q51 and q5 a are completely uncorrelated, that is E{~bl(¢0q52(¢2)} is zero and ~ can range from - o o to oo.
We may now write E{Gm.* } as
E{uiu~*} = I ~_ ~I ~_ o~I ~_ ~I ~_ ~ Pla f(q)f(c2) exp [2ni([el - c¢21x + [//~ - fl2]Y)]
x E{exp [i(c~(~)+dp2(//l)-d?,(%)-~z(f12))]} d~d//~dc~2d//2 . (A12)

956 ANTON Z1OLKOWSKI
When el ~ e2 and/~1 ~ /~2 ~bl(el), qS~(e2), ~b2(fll) and q52(f12) are independent quantities such that
E{ exp [i(q51(ex) + qSz(fll) - qbl(ez) - q52(f12))]}
= E{ exp [i$1(e0]} • E{ exp [i~bz(fl0] ) . E{ exp [-i~b,(e2)]}. E{ exp [-i~bz(f12)] }
= 0 .
However, when el = e2 and/~1 = f12,
E{ exp [i(q51(e x) + qSz(fll)- qSx(e2)- ~b/(fl/))]} = 1 .
Therefore,
E{ exp [i(q51(cq) + qSz(f10 - ~bl(e2) - q52(f12))l} = 6(ea - e2) 6(fll - f12).
It now becomes convenient to change coordinates such that
_ _ e l + e z 31 + 3 z e' e ~ - ~ /3' ~1-/3~ ~ o - [~o-"
2 ' 2 2 2
whence
E{UzUz* } = S ~_ oo~ ~_ oo~ ~_ ooS~ oo e l 2 f ( c l ) f ( c 2 ) exp [4rti(e'x + fl'y)] 6(e') 6(fl') de' dfl' de0 dflo.
(A13)
Therefore,
E(u~uz*} = SE ~-~ ~ Pa 2 f2(Co) de ° dflo (A14)
where c o = (Co + flo) 1/2. We may change coordinates again by putting 0 = tan-1 (flo/eo).
Equation (A14) then becomes
E{uzuz*} = r~,~r® J0 J0 P12f2(co)codcodO
= 2re ~ P12 f2 (co ) c o de o . (A15)
This integral may be evaluated by standard methods (Abramowitz and Stegun, 1964) to give
E { u z u , } = PI"--T[(1 - v 2) 11 + 2(1 - v) rcz 12 + ~2Z2133 (AI 6) 2/rf12
where
and
F4( 2nz + ~/) (Y + 2rcz + r/)] = --loge / _l'
72
Iz = 2(27rz + r/) (Y + 4nz + 2q) (y + 2zrz + q)
72 [72 + @(2rcz + r/) + 6(2rcz + r/) 2]
/3 = 412nz + q]2 [7 + 47rz + 2q] 2 [Y + 2nz + q]z •
Equation (A16) becomes infinite if either 7 is infinite or r /and z are both zero. In order that the expression for the noise converges for a half-space model, the pressure distribu- tion must be band-limited in wave-number space.

LONG-PERIOD NONPROPAGATING SEISMIC NOISE 957
APPENDIX 3
Synthesization o f the Green's Function.for a Half-Space from Fourier Components
The normal stress at the surface of a half-space may be written as
az~ = S~oS_~oo Pl(c~, fl) cos (Drex+qSt(c0) cos (27rfly+(o2(fl))dedfl, (A17)
where P1 is a function of e and fl and ~bl(7 ) and q52(fl) are phase angles. The vertical displacement, u~, at a depth z is given by
foo y , pl(c~,fl)[2(1-v)+2rccz]e-2=C=c°s(2~x+gP,(~))c°s(2~flY+qa2(fl))dadfl u z = 4rel ic
- - o o - - o o
(A18) where c = (~2+fi2)1/2. (See Appendix 2).
If we now make P~ a constant for all a and fl and put ~bl(a) = 0 and ~bz(a) = 0 we can write equation (A17) as
azz = S ~- o~*-oo Pa cos (2m~x) cos (2~rfiy) d~ dfl
= Re[~-~5°2-~ P1 e - 2 n i ( = x + # Y ) d ~ tiff]. (A19)
This has circular symmetry in ~, fl space and can be written as a Hankel Transform. We put e 2 = ~2+fl2 and x 2 + y 2 = r 2. Then
a= = Re[~o ~o P1 e-2~i . . . . . ~o-~o) ededO]
= Re[Sy Px(I2o ~ e -2~'~°~° dO) cdc]
= 27r ~ e l Jo(2zcer) ede
6(r) = P~ - P ,a (x ,y ) , (A20)
7zr
(Bracewell, 1965). Thus, the pressure distribution becomes a point force at the origin. Equation (A 18) becomes
Re - - - - e - 2 n c z u= = L2rc " 2p J-ooJ-~o . - j e -2=i''x+ay) d~ d f l ] . (A21)
This also has circular symmetry in ~, fl space and can, therefore, be written as a Hankel transform.
4~/~u~ = p i R e [ f ~ f z " [ 2 ( l - v ! + 2 r c c z ] o . . . . . ,o-~) cdcdO]
.. I- ~.oo [ - 2 0 - v ) + 2 ~ e z ] °-2 .... ,~. -=., . . . . . o dO} cde] = "eLJo l ; j o .Jo e
] ] = Re 2zr 2(1-v)+27zcz e_2,~ZJo(2ncr) ede L d o e
= 27z j'~o 2(1 - v) e- 2~tczc Jo(2~cr)cdc + 27r~ 2rcz e- 2ncz Jo(27rcr)cdc
2(1 - v) z 2 = (Z 2 + r 2) 1/2 ~ (72 _[_ r 3)3/2 (A22)

958
(Bracewell, 1965). Therefore,
ANTON Z1OLKOWSKI
P1 [-2(l-v) z2-1
where R = (x z + y2 + zZ)~/z. This is the Green's function