
Predictable Design for Real-time Embedded Control A Case Study Jinfeng Huang & Jeroen Voeten...
12
Predictable Design for Real-time Embedded Control A Case Study Jinfeng Huang & Jeroen Voeten Eindhoven University of Technology PROGR PROGRE SS SS
-
Upload
juliet-hodges -
Category
Documents
-
view
243 -
download
1
Transcript of Predictable Design for Real-time Embedded Control A Case Study Jinfeng Huang & Jeroen Voeten...

Predictable Design for Real-time Embedded Control
A Case Study
Jinfeng Huang & Jeroen VoetenEindhoven University of Technology
PROGRPROGREESSSS

2
Contents
•A running example: railroad crossingA running example: railroad crossing
•Problems in current design practiceProblems in current design practice
•Compositional design approachCompositional design approach
•DemoDemo

3
Railroad Crossing
•Trains run independently at different velocities
•Velocities are constant
•Avoid collisions
•As efficient as possible
StationStation
Station
B
AA D
D
A
Critical zone
Crossingarea
Station
B CB
C
4
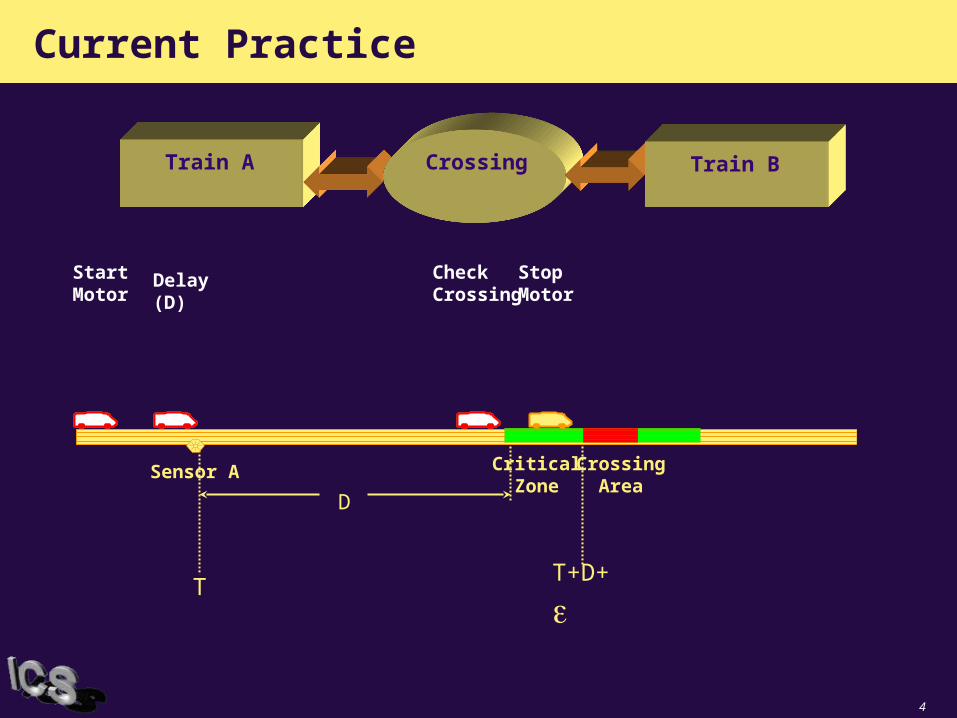
Current Practice
Train A Crossing Train B
D
TT+D+
StartMotor
CrossingArea
CriticalZone
Sensor A
Delay (D)
CheckCrossing
StopMotor

5
Timing Property
•(Timed) execution trace of “Train A”:
1+2 ?
SensorA signaled T
Delay D
T+DCheck Crossing
T+D+1Stop motor T+D+1+2
Between D and D+ seconds after Train A has passed Sensor A, “Train A” checks the Crossing and stops the train if the Crossing is occupied

6
Timing Property - Add other Components •e.g. to control other trains or crossings.
•(Timed) execution trace of “Train A” (disturbed by other components):
1+2+3+1+2 BOOM !!!
SensorA signaled T
Delay D
T+1+D
Check Crossing T+1+D +2+1
Stop motor T+1+D +2+1+3+2
Other components running T+1
T+1+D+2
T+1+D +2+1+3

7
Problems in current practice
•Behaviors of components are not compositional
•Debug and analysis codes “pollute” the timing behavior of the system
•Lack reusability, maintainability, portability etc.
•Lack facilities to guarantee property preservation: Lack facilities to guarantee property preservation: Implementation exhibits unexpected behaviors not Implementation exhibits unexpected behaviors not present in the modelpresent in the model

8
Compositional Approach (Modeling)
•POOSL: Based on a two-phase execution frame: Based on a two-phase execution frame: actions are instantaneous and time progress is actions are instantaneous and time progress is represented in a virtual way (instead of based represented in a virtual way (instead of based directly on a physical clock) directly on a physical clock) •Compositional semanticsCompositional semantics
•ExecutableExecutable
•Expressive (concurrency, time, Expressive (concurrency, time, communication…)

9
Compositional Approach (Modeling)
Train A Train BCrossingAbstract Model
Refinement
Verification
Train AActor
Train AI mage
Train BI mage
Train BActor
Train BCrossingTrain A
Extended Model
SafetyMonitoring
Simulation
Refinement
Estimation of
Synthesis
Synthesis Model
Train AImage
Train BImage
Crossing
LEGO DACTA Interface

10
Compositional Approach (Synthesis)
•Automatic code generation (RT-Rotalumis,C++)
•Real-time property-preserving mapping
guaranteed by the -hypothesis•The execution tree: ordering of actions is kept from
model to implementation
•Synchronization between virtual time and physical time: if an action happens at virtual time t in model it happens in physical time interval (t-/2,t+/2) in implementation

11
Demo: The Railroad Crossing
StationStation
Station
B
AA D
D
A
Critical zone
Crossingarea
Station
B CB
C
- 100 - 20 20 100 cm
- 100
20
100
•Velocity TrainA: 40 cm/s
•Velocity TrainB: 90 cm/s
Extended Model
Synthesis Model
Realization
Rapid analysis
Abstract Model
Models and video are not included in the presentation. For those who are interested, please mailto: [email protected]
12
Future Work and Open Issues
•Mapping efficiency•Prediction / platform requirements•Multi-processor platforms
•Streaming data
•Continuous-time environmental models
•Tools


















