Pole-shifting techniques for multivariable feedback systems
2
Pole-shifting techniques for multivariable feedback systems D. G. Retallack, B.Eng., M.Sc, and Prof. A. G. J. MacFarlane, D.Sc, Ph.D., C.Eng., F.I.E.E. Indexing terms: Multivariable control systems, State-space methods, Poles and zeros Abstract A straightforward state-feedback pole-shifting algorithm is derived from the Hsu-Chen theorem relating the open- and closed-loop characteristic frequencies of multivariable feedback systems to the return-difference determinant. The simplicity of the derivation and its relationship to transfer-function descriptions should prove helpful in the search for design techniques for systems with incomplete state feedback. 1 Introduction One of the most interesting aspects of the present work in control-system theory is the re-emergence in a multiple- loop context of classical concepts in single-loop feedback theory. In particular, Bode's 1 return-difference idea has been shown by Hsu and Chen 2 to give a natural extension of Nyquist's stability criterion to the multiple-loop case. The purpose of this paper to derive a simple pole-shifting 3 " 9 algorithm 8 * 9 for multivariable systems from the Hsu-Chen theorem. This provides an interesting link between state-space and transfer-function matrix representations in the treatment of pole shifting. Extensions of the approach should lead to further integration of state-space and frequency-domain ideas and to new design procedures for more general multivariable feedback problems (with incomplete state feedback 10 etc.). 2 Hsu-Chen theorem In the multivariable feedback system in Fig. 1, let G(s) = (si — A)~ l B be the transfer-function matrix from the r K U G(s) Fig. 1 Multivariable feedback system inputs u to the state vector x for a linear-constant multivari- able system x(i) = Ax(t) + Bu(t) and let K be a constant proportional-gain matrix. Then, for the closed-loop system, x( s ) = T- l (s)G(s)Kr(s) where T(s) = [I + G(s)K] = [I + (si - A)~ X BK] . (1) is the system return-difference matrix and / is a unit matrix of appropriate order. The Hsu-Chen theorem states that (si- A)~ X BK\ = \SI-A\ "Ay) * (2) where \sl — A\ = characteristic polynomial of the open-loop system \sl — A + BK\ = characteristic polynomial of the closed- loop system Ay = set of open-loop characteristic frequencies Pj — set of closed-loop characteristic frequencies Paper 6138 C, first received 13th November 1969 and in revised form 30th January 1970 Mr. Retallack is with the Control Systems Centre, and Prof. MacFarlane is with the Electrical Engineering Department, University of Manchester Institute of Science & Technology, Manchester M60 1QD, England PROC. IEE, Vol. 117, No. 5, MAY 1970 The necessity of controllability for pole shifting 4 is implicit in eqns. 1 and 2, and this will be clarified in the following Sections. 3 Systems with distinct eigenvalues Suppose that A and B in eqn. 2 have dimensions n X n and n x /, respectively, and that A has distinct eigenvalues Aj, A 2 , . . ., X n , then A = I/AC/- 1 (3) where A = diag (A,, . . ., A n ) u = [u u u 2 , . . ., u n ] Uj = eigenvector of A for ith eigenvalue A,- Let the eigenvalues to be altered by the proportional state feedback be Aj, A 2 , . . ., A p . Consider the effect of using K=fd'V n (4) where fd' is the outer (dyadic) product of an / x 1 vector / and a 1 x p vector </', and V n is made up of the p rows of U~ l corresponding to A}, A 2 , . . ., A p . Eqn. 2,then gives ft (* " Pj) . (5) The manipulation of eqn. 5 is greatly simplified by the Schur formulas 11 for partitioned determinants, and it may be helpful to quote them at this point: W X Y Z = \W\\Z-YW~ X X\ (6) = \Z\\W- XZ~ X Y\ if|Z|=£0 . (7) Applying these formulas to the left-hand side of eqn. 5 gives |/ + U(sl - A)" x U~ x Bfd' V x ,| = 1 +d'V u [U(sI- A)~ X U = 1 +d'(sI-A u )- x V n Bf (8) where An = diag (Aj, A 2 , . . ., Consideration of eqns. 5 and 8 indicates that remain as closed-loop eigenvalues; i.e. 1J (* - Pj) II (* - Ay) 1 j, . . ., A n .. (9) 1037
Transcript of Pole-shifting techniques for multivariable feedback systems

Pole-shifting techniques for multivariable feedbacksystemsD. G. Retallack, B.Eng., M.Sc, and Prof. A. G. J. MacFarlane, D.Sc, Ph.D., C.Eng., F.I.E.E.
Indexing terms: Multivariable control systems, State-space methods, Poles and zeros
Abstract
A straightforward state-feedback pole-shifting algorithm is derived from the Hsu-Chen theorem relating theopen- and closed-loop characteristic frequencies of multivariable feedback systems to the return-differencedeterminant. The simplicity of the derivation and its relationship to transfer-function descriptions shouldprove helpful in the search for design techniques for systems with incomplete state feedback.
1 IntroductionOne of the most interesting aspects of the present work
in control-system theory is the re-emergence in a multiple-loop context of classical concepts in single-loop feedbacktheory. In particular, Bode's1 return-difference idea has beenshown by Hsu and Chen2 to give a natural extension ofNyquist's stability criterion to the multiple-loop case. Thepurpose of this paper to derive a simple pole-shifting3"9
algorithm8*9 for multivariable systems from the Hsu-Chentheorem. This provides an interesting link between state-spaceand transfer-function matrix representations in the treatmentof pole shifting. Extensions of the approach should lead tofurther integration of state-space and frequency-domain ideasand to new design procedures for more general multivariablefeedback problems (with incomplete state feedback10 etc.).
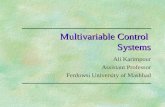
2 Hsu-Chen theoremIn the multivariable feedback system in Fig. 1, let
G(s) = (si — A)~lB be the transfer-function matrix from the
rK U
G ( s )
Fig. 1Multivariable feedback system
inputs u to the state vector x for a linear-constant multivari-able system
x(i) = Ax(t) + Bu(t)
and let K be a constant proportional-gain matrix. Then, forthe closed-loop system,
x(s) = T-l(s)G(s)Kr(s)
where T(s) = [I + G(s)K] = [I + (si - A)~XBK] . (1)
is the system return-difference matrix and / is a unit matrix ofappropriate order. The Hsu-Chen theorem states that
(si- A)~XBK\ =\SI-A\ "Ay) *
(2)
where\sl — A\ = characteristic polynomial of the open-loop
system\sl — A + BK\ = characteristic polynomial of the closed-
loop systemAy = set of open-loop characteristic frequenciesPj — set of closed-loop characteristic frequencies
Paper 6138 C, first received 13th November 1969 and in revised form30th January 1970Mr. Retallack is with the Control Systems Centre, and Prof. MacFarlaneis with the Electrical Engineering Department, University of ManchesterInstitute of Science & Technology, Manchester M60 1QD, England
PROC. IEE, Vol. 117, No. 5, MAY 1970
The necessity of controllability for pole shifting4 is implicitin eqns. 1 and 2, and this will be clarified in the followingSections.
3 Systems with distinct eigenvaluesSuppose that A and B in eqn. 2 have dimensions n X n
and n x /, respectively, and that A has distinct eigenvaluesAj, A2, . . ., Xn, then
A = I/AC/-1 (3)
where A = diag (A,, . . ., An)u= [uuu2, . . ., un]
Uj = eigenvector of A for ith eigenvalue A,-
Let the eigenvalues to be altered by the proportional statefeedback be Aj, A2, . . ., Ap. Consider the effect of using
K=fd'Vn (4)
where fd' is the outer (dyadic) product of an / x 1 vector /and a 1 x p vector </', and Vn is made up of the p rows ofU~l corresponding to A}, A2, . . ., Ap.
Eqn. 2,then gives
ft (* " Pj). (5)
The manipulation of eqn. 5 is greatly simplified by theSchur formulas11 for partitioned determinants, and it may behelpful to quote them at this point:
W XY Z
= \W\\Z-YW~XX\ (6)
= \Z\\W- XZ~XY\ i f |Z |=£0 . (7)
Applying these formulas to the left-hand side of eqn. 5 gives
|/ + U(sl - A)"xU~xBfd' Vx,|= 1 +d'Vu[U(sI- A)~XU
= 1 +d'(sI-Au)-xVnBf
(8)
where An = diag (Aj, A2, . . .,
Consideration of eqns. 5 and 8 indicates thatremain as closed-loop eigenvalues; i.e.
1J (* - Pj)
II (* - Ay)1
j , . . ., An
. . (9)
1037

If VnB has no zero rows (which is a necessary and sufficientcondition7 for controllability of the subsystem with At , . . . , Apas eigenvalues), / in eqn. 8 may be adjusted so that j8 has nozero elements. With the closed-loop eigenvalues plt . . ., pp
specified, a partial-fraction expansion of the right-hand sideof eqn. 9 yields
n <* -PJ) ,(* - A,)
where
n (A, -(10)
From eqn. 9, the desired eigenvalue shifts can be accomplishedby setting
(ID
where dt and 0/ are the ith elements of d' and (J, respectively.It is important to note that K = fd' Vx x has rank one, and
that the simplicity of the above pole-shifting algorithm followsdirectly from this restriction. This step has been adopted byseveral authors,5*7>8> l0 but sacrifices much of the design free-dom available in multivariable feedback design problems; thereduction to a scalar variable d'Vnx within the loop maymake it difficult to satisfy performance criteria other than asimple allocation of closed-loop eigenvalues. Repeatedapplication of the procedure [to obtain K = \fd' Vn)x +(fd'Vi j)2 4- . . .] produces a gain matrix of higher rank. How-ever, new eigenvectors must be calculated at each stage,7 andthe consideration of other design criteria still may provedifficult. These are important motivations for further develop-ment of the techniques in the search for more complete designprocedures.
4 Systems with repeated eigenvaluesSuppose A, = A2'= . . . = Xq(q < p) are contained
only in a single q x q Jordan block in A,, in eqn. 8. The algo-rithm for the distinct eigenvalue portion remains as inSection 3, and that for the Jordan block is
(</, . . . d ) = (a, . . . a j Pqfiq-
AJ
• • (12)
where, by partial-fraction expansion of eqn. 9,
= i +Z« / / ( * -
i=q+l P
+ Si=q+l
This is easily verified by substitution of
- A , ) - l 0
- 1
0 \s - A
- A,) . (13)
l /^-A,)2 . . . ! / ( J - A , K
! /(* - A,)2
(14)
into the left-hand side of eqn. 9. fiq in eqn. 12 may be madenonzero if, and only if, the #th row of VnB is nonzero, whichis the necessary and sufficient condition for controllability ofthe single Jordan block.7
If Aj is contained in another Jordan block of A( i ofdimension less than or equal to q, it is apparent from ah in-spection of eqns. 9 and 14 that, at most, q of these eigenvaluesmay be shifted by the above procedure; this is also evidentfrom controllability arguments.7 Difficulties of this sort maybe overcome by repeated use of the procedures as describedin Section 3.
5 References1 BODE, H. w.: 'Network analysis and feedback amplifier design'
(Van Nostrand, 1945)2 HSU, c. H., and CHEN, C. T. : 'A proof of the stability of multivariable
feedback systems', Proc. Inst. Elect. Electron. Engrs., 1968, 56,pp. 2061-2062
3 ANDERSON, B. D. o;, and LUENBERGER, D. c : 'Design of multi-variable feedback systems', Proc. IEE, 1967, 114, (3), pp. 395-399
4 WONHAM, w. M. : 'On pole assignment in multi-input controllablelinear systems', IEEE Trans., 1967, AC-12, pp. 660-665
5 DAVISON, E. J., and WONHAM, W. M.: 'On pole.assignment in multi-variable linear systems', ibid., 1968, AC-13, pp. 747-748
6 HEYMANN, M., and WONHAM, w. M.: 'Comments on pole assign-ment in multi-input controllable linear systems', ibid., 1968,AC-13» pp. 748-749
7 SIMON, j . D., and MITTER, S. K.: 'A theory of modal control',Information and Control, 1968, 13, pp. 316-353
8 GOULD, L. A.: 'Pole allocation in distributed system'. Symposiumon modern system theory, University of Bergen, Norway, 1969
9 CROSSLEY, T. R., and PORTER, B. : 'Synthesis of aircraft controlsystems having real or complex eigenvalues', / . Roy. Aeronaut.Soc, 1969, 73, pp. 138-142
10 DAVISON, E. J. : 'On pole assignment in linear systems with in-complete state feedback'. Hawaii international conference onsystem sciences, Jan. 1969
11 GANTMACHER, F. R. : 'The theory of matrices—Vol. 1' (Chelsea,1959), p. 46
1038 PROC. IEE, Vol. 117, No. 5, MAY 1970