Point-Free Topology
130
Part 1: Locales and formal topology Part 2: Point-free construction of spaces Part 3: Locally Compact Spaces Part 4: Additional Topics and Outlook Point-Free Topology Erik Palmgren Uppsala University, Dept. of Mathematics MAP Summer School 2008, International Centre for Theoretical Physics. Trieste, August 11 – 22, 2008. 1 / 130
Transcript of Point-Free Topology

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Point-Free Topology
Erik PalmgrenUppsala University, Dept. of Mathematics
MAP Summer School 2008,International Centre for Theoretical Physics.
Trieste, August 11 – 22, 2008.
1 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Topology and choice principles
It is well-known that some basic theorems classical topology use(and require) the full Axiom of Choice:
Tychonov’s Theorem (AC): If (Xi )i∈I is a family of (covering)compact spaces then the product topology∏
i∈I
Xi
is compact.
Special case: The Cantor space C = 0, 1N is compact.
2 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Constructive topology
To carry out topology on a constructive foundation it is necessaryto come to grips with compactness.
Brouwer’s solution: The compactness of the Cantor space followsfrom the nature of choice sequences. This the Fan Theorem.Moreover, it implies that the interval [0, 1] is compact.
Kleene: The Cantor space is not compact under a recursiverealizability interpretation.
E. Bishop: Restricting to metric spaces, covering compactnessshould be replaced by total boundedness (Foundations ofConstructive Analysis, 1967).
3 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Point-free topology
A quite early idea in topology: study spaces in terms of therelation between the open sets. (Wallman 1938, Menger 1940,McKinsey & Tarski 1944, Ehresmann, Benabou, Papert, Isbell,...)
For a topological space X the frame of open sets (O(X ),⊆) is acomplete lattice satisfying an infinite distributive law
U ∧∨i∈I
Vi =∨i∈I
U ∧ Vi
(or, equivalently, is a complete Heyting algebra). The inversemapping of a continuous function f : X // Y gives rise to alattice morphism
f −1 : O(Y ) // O(X )
which preserves arbitrary suprema∨
.4 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Many important properties of topological spaces may be expressedwithout referring to the points, but only referring to the relationbetween the open sets. For example a topological space X iscompact if for any family of open sets Ui (i ∈ I ) in X we have
if⋃
i∈I Ui = X , then there are i1, . . . , in ∈ I so that Ui1 ∪ · · · ∪ Uin = X
That is, every open cover of the space has a finitely enumerable(f.e.) subcover.
5 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Recall: A lattice is a partially ordered set (A,≤) where every finitelist a1, . . . , an of elements has a supremum
a1 ∨ · · · ∨ an =∨
i∈1,...,n
ai
and an infimum
a1 ∧ · · · ∧ an =∧
i∈1,...,n
ai
For n = 0 these are respectively ⊥ (the smallest element) and T(the largest element).
6 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A lattice (A,≤) is a distributive if
a ∧ (b ∨ c) = (a ∧ b) ∨ (a ∧ c)
(Exercise show that a ∨ (b ∧ c) = (a ∨ b) ∧ (a ∨ c) follows.)
A lattice A is complete if sup S exists for every subset S ⊆ A.
Proposition: In a complete lattice A the infimum of S ⊆ A, isgiven by ∧
S =∨x ∈ A : x is a lower bound of S.
7 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Def A frame (or locale) is a complete lattice A which satisfies theinfinite distributive law:
a ∧ (∨i∈I
bi ) =∨i∈I
a ∧ bi
for any subset bi : i ∈ I ⊆ A.
Example
If X is a topological space, then its open sets (O(X ),⊆) orderedby inclusion form a frame. Here
U ∧ V = U ∩ V∨i∈I
Ui =⋃i∈I
Ui .
However, ∧i∈I
Ui = Interior(⋂i∈I
Ui ).
8 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A lattice A is a Heyting-algebra if there is a binary operation(· ⇒ ·) : A× A // A so that for all a, b, c ∈ A:
a ∧ b ≤ c =⇒ a ≤ (b ⇒ c).
(Cf. laws for implication.)
Theorem. Let A be a complete lattice. Then A is Heyting-algebraiff A is a frame.
To prove the if-direction define
(b ⇒ c) =∨a ∈ A : a ∧ b ≤ c.
9 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
In a Heyting algebra we can define a pseudo-complement
¬a = (a⇒ ⊥).
We havea ∧ ¬a = ⊥.
However a ∨ ¬a = T is in general false:
Example
Let R be the real line with the usual topology. Then for an opensubset U ⊆ R we have
¬U =⋃V ∈ O(R) : V ∩ U = ∅.
In particular, ¬(0, 1) = (−∞, 0) ∪ (1,∞) so
(0, 1) ∨ ¬(0, 1) 6= R = T.
10 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A frame morphism h : A // B from between frames is a latticemorphism that preserves infinite suprema:
(i) h(T) = T,
(ii) h(a ∧ b) = h(a) ∧ h(b),
(iii) h(∨
i∈I ai ) =∨
i∈I h(ai ).
The frames and frame morphisms form a category, Frm.
Example
A typical frame morphism is the pre-image operation f −1 : O(Y )// O(X ), where f : X // Y is any continuous function.
11 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
For conceptual reasons one considers the opposite category of thecategory of frames:Def Let A and B be two locales. A locale morphism f : A // Bis a frame morphism f ∗ : B // A.The composition g f of locale morphisms f : A // B and g : B
// C is given by(g f )∗ = f ∗ g∗.
Denote the category of locales and locale morphisms by Loc.
The locale (frame) (O(?),⊆) that comes from the one pointspace ? is denoted 1. It is the terminal object of Loc. HereT = ? and ⊥ = ∅.
12 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Since the points of an ordinary topological space X are in 1-1correspondence with the maps ? // X (necessarily continuous)we may define what a point of locale is by analogy:Def. Let A be a locale. A point of A is any locale morphism p : 1
// A.Note that such point is a frame morphism p∗ : A // 1, which iscompletely determined by the elements
Fp = a ∈ A : p∗(a) = T
sent to T. Thus we may identify points with completely primefilters F on A, i.e. F ⊆ A containing T such that
I a ∈ F , a ≤ b =⇒ b ∈ F ,
I a, b ∈ F =⇒ a ∧ b ∈ F ,
I∨
i∈I ai ∈ F =⇒ (∃i ∈ I ) ai ∈ F .
13 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Fundamental adjunction
Theorem The functor Ω : Top // Loc is left adjoint to thefunctor Pt : Loc // Top, that is, there is an bijection
θX ,A : Loc(Ω(X ),A) ∼= Top(X ,Pt(A)),
natural in X and A.
Here Ω(X ) = (O(X ),⊆) and Ω(f )∗ = f −1 : Ω(Y ) // Ω(X ) forf : X // Y .
Pt(A) is the set of points of the locale A, and Pt(f )(x) = f x .
14 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A locale is spatial if it has enough points to distinguish elements ofthe locale i.e.
a∗ = b∗ =⇒ a = b.
A space X is sober if every irreducible closed set is the closure of aunique point. (A nonempty closed C is irreducible, if for any closedC ′,C ′′: C ⊆ C ′ ∪ C ′′ implies C ⊆ C ′ or C ⊆ C ′′.)
The adjunction induces an equivalence between the category ofsober spaces and category of spatial locales:
Sob ' Spa
Remark Ω gives a full and faithful embedding of all Hausdorffspaces into locales (in fact of all sober spaces).
15 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Locale Theory — Formal Topology
Standard Locale Theory can be dealt with in an impredicativeconstructive setting, e.g. in a topos (Joyal and Tierney 1984).
The predicativity requirements of BISH requires a goodrepresentation of locales, formal topologies. They were introducedby Martin-Lof and Sambin (Sambin 1987) for this purpose.
(A,≤, C ) is a formal topology if (A,≤) is a preorder, and C is anabstract cover relation which extends ≤. It represents a locale(Sat(A),⊆) whose elements are the saturated subsets U ⊆ A, i.e.
a C U =⇒ a ∈ U
(A formal topology corresponds to Grothendieck’s notion of a siteon a preordered set. )
16 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
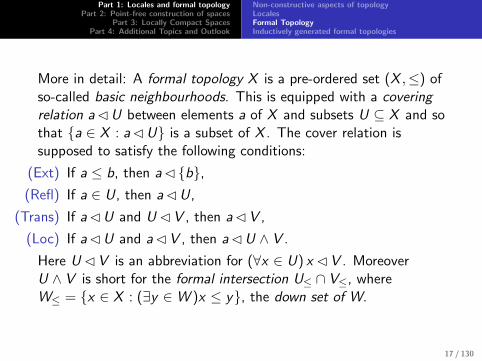
More in detail: A formal topology X is a pre-ordered set (X ,≤) ofso-called basic neighbourhoods. This is equipped with a coveringrelation a C U between elements a of X and subsets U ⊆ X and sothat a ∈ X : a C U is a subset of X . The cover relation issupposed to satisfy the following conditions:
(Ext) If a ≤ b, then a C b,(Refl) If a ∈ U, then a C U,
(Trans) If a C U and U C V , then a C V ,
(Loc) If a C U and a C V , then a C U ∧ V .
Here U C V is an abbreviation for (∀x ∈ U) x C V . MoreoverU ∧ V is short for the formal intersection U≤ ∩ V≤, whereW≤ = x ∈ X : (∃y ∈W )x ≤ y, the down set of W.
17 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A point of a formal topology X = (X ,≤, C ) is a subset α ⊆ Xsuch that
(i) α is inhabited,
(ii) if a, b ∈ α, then for some c ∈ α with c ≤ a and c ≤ b,
(iii) if a ∈ α and a ≤ b, then b ∈ α,
(iv) if a ∈ α and a C U, then b ∈ α for some b ∈ U.
The collection of points in X is denoted Pt(X ). It has a point-settopology given by the open neighbourhoods:
a∗ = α ∈ Pt(X ) : a ∈ α.
18 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
We shall often consider different cover relations C , C ′, C ′′, . . . onone and the same underlying pre-ordered set (X ,≤). There is annatural ordering of cover relations
C ⊆ C ′
which holds iff for all a ∈ X and for all subsets U of X , a C Uimplies a C ′U. We say that C is smaller than C ′. On a givenpreorder (X ,≤) there is a smallest cover relation given by
a C sU ⇐⇒def a ∈ U≤.
(Check this as an exercise.) If ≤ is = on X , this correspond to(X ,≤, C s) being the discrete topology. There is also a largestcover relation
a C tU ⇐⇒def true,
which gives the trivial topology.19 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Many properties of the formal topology X can now be defined interms of the cover directly. We say that X is compact if for anysubset U ⊆ X
X C U =⇒ (∃ f.e. U0 ⊆ U) X C U0.
For U ⊆ X define
U⊥ = x ∈ X : x ∧ U C ∅,
the open complement of U. It is easily checked that U⊥ ∧ U C ∅,and if V ∧ U C ∅, then V C U⊥.A basic neighbourhood a is well inside another neighbourhood b ifX C a⊥ ∪ b. In this case we write a ≪ b. A formal topologyX is regular if its cover relation satisfies
a C b ∈ X : b ≪ a.
(Compact Hausdorff = Compact regular.)20 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
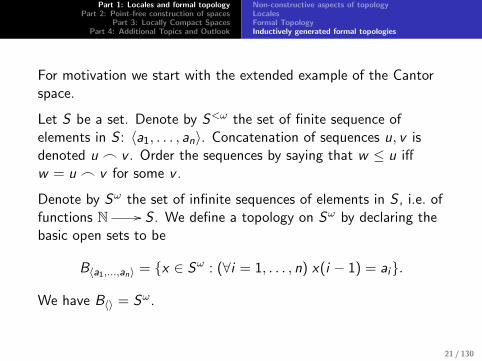
For motivation we start with the extended example of the Cantorspace.
Let S be a set. Denote by S<ω the set of finite sequence ofelements in S : 〈a1, . . . , an〉. Concatenation of sequences u, v isdenoted u _ v . Order the sequences by saying that w ≤ u iffw = u _ v for some v .
Denote by Sω the set of infinite sequences of elements in S , i.e. offunctions N // S . We define a topology on Sω by declaring thebasic open sets to be
B〈a1,...,an〉 = x ∈ Sω : (∀i = 1, . . . , n) x(i − 1) = ai.
We have B〈〉 = Sω.
21 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
By letting S = 0, 1 we get the so-called Cantor spaceC = 0, 1ω of infinite binary sequences. By letting S = N weobtain the Baire space Nω.
Classically we can show that Sω is compact iff S is finite. Thisuses Konig’s lemma.
Brouwer’s Fan Theorem implies that the Cantor space, and in factevery subspace of the form Bv , is covering compact: For anysubset M ⊆ 0, 1<ω:⋃
u∈M
Bu = Bv =⇒ (∃ f.e. F ⊆ M)⋃u∈F
Bu = Bv .
However this “theorem” is really an axiom as it is false under manynatural constructive interpretations, for instance recursiverealizability interpretations.
22 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
For a finite F = u1, . . . , um ⊆ 0, 1<ω the covering relation⋃u∈F Bu = Bv can be checked by considering sequences of length
n = max(|u1|, . . . , |um|). We have⋃u∈F
Bu = Bv ⇐⇒ (∀w ∈ 0, 1<ω)(|w | = n,w ≤ v ⇒ w ∈ F≤).
We abbreviate the righthand side as the property K (v , n,F ). Thisproperty is clearly decidable given v , n and F .
23 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
We shall now define a formal topology corresponding to the Cantorspace. Let C = (0, 1<ω,≤, C ) where ≤ is as above and C isgiven by
v C U ⇐⇒def (∃ f.e. F ⊆ U)(∃n) K (v , n,F ).
Now compactness is built-in to the cover relation.
Thm. C is a compact formal topology and Pt(C ) ∼= C.
Note: for any uu C u _ 〈0〉, u _ 〈1〉.
24 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
The formal topology C = (C ,≤, C ) is inductively generated bythe following axiom
u C u _ 〈0〉, u _ 〈1〉
in the sense that
Thm If C ′ is another cover relation so that (C ,≤, C ′) is a formaltopology and
u C ′u _ 〈0〉, u _ 〈1〉 (u ∈ C )
thena C U =⇒ a C ′U.
This gives an induction principle for the cover relation which is animportant proof method.
25 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
For a given preorder (X ,≤) an cover axiom is a pair (a,G ) wherea ∈ X and G is a subset of X . We suggestively write this pair as
a ` G .
A formal topology X = (X ,≤, C ) is (inductively) generated by afamily ai ` Gii∈I of cover axioms, if C is the smallest coverrelation on (X ,≤) which satisfies all the axioms, i.e. ai C Gi for alli ∈ I .
26 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
We may define the formal Baire space as B = (N<ω,≤, C ) whereis C is inductively generated by
u ` u _ 〈n〉 : n ∈ N (u ∈ N<ω)
Proposition: B is a regular formal topology.Proof: We have u ≪ u, since N<ω C u ∪ u⊥.
NB: Such covers can be shown to exist using strong inductionaxioms. In fact for any set of cover axiom, there is a cover relationgenerated by them.
27 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Set-presented vs inductively generated formal topologies
Def. A formal topology X = (X ,≤, C ) is set-presented if there isa family of subsets C (a, i) ⊆ X (a ∈ X , i ∈ I (a)) so that
a C U ⇐⇒ (∃i ∈ I (a))C (a, i) ⊆ U.
Example
1. Impredicatively, every formal topology X is set-presented byI (a) = U ⊆ X : a C U and C (a,U) = U.2.The Cantor space is set-presented by
I (a) = (F , n) ∈ Pf.e.(X )× N : K (a, n,F )C (a, (F , n)) = F
Theorem. A formal topology is set-presented iff it is inductivelygenerated by some set of cover-axioms.
28 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Induction on covers
As a simple illustration of the method of induction on covers wegive alternative characterisation of points in an inductivelygenerated formal topology A = (A,≤, C ). Suppose that A isgenerated by the axioms
R = ai ` Vii∈I .
We call α ⊆ A an R-splitting filter, if it satisfies conditions (i)-(iii)for a point but instead of (iv), only the more restrictive conditionthat for any i ∈ I
ai ∈ α =⇒ (∃b ∈ Vi ) b ∈ α. (1)
(This is often easier to check.)
29 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Induction on covers (cont.)
Proposition. Each R-splitting filter is a point.
Proof. We need to prove that for each R-splitting filter α, thecondition (iv) holds. The trivial but crucial observation is that (iv)can be expressed as:
a C U =⇒ [a ∈ α⇒ (∃b ∈ U)b ∈ α].
Since C is the smallest cover relation satisfying R it is nowsufficient to prove that
a C ′U ⇐⇒def [a ∈ α⇒ (∃b ∈ U)b ∈ α].
defines a cover relation satisfying R.By (1) it clearly satisfies R.
30 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Induction on covers (cont.)
It remains to check that C ′ satisfies (Ext), (Refl), (Trans) and(Loc).(Ref) is immediate. (Ext) follows by (ii). (Loc) follows by (iii).(Trans): Suppose a C ′U and U C ′W . We want to show a C ′W :suppose a ∈ α. Hence there is b ∈ U with b ∈ α. Thus b C ′W ,and hence (∃c ∈W )c ∈ α, which was to be shown.
For an inductively generated formal topology A, the collection ofpoints Pt(A) is in generally only a class.
31 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
A point-wise cover which is not a formal cover
In realizability models of intuitionistic systems the so-called ChurchThesis (better named Church-Turing Thesis) is valid. It says thatevery function on natural numbers is computable by a Turingmachine:
(CT) (∀f : N // N)(∃e ∈ N)(∀x ∈ N)(∃y ∈ N)(T (e, x , y) ∧ U(y) = f (x)).
Here T is the Kleene predicate and U is the result extractingfunction.
A consequence is e.g. that the number of points in the Cantorspace (and similar spaces) will be restricted in such models. Thestrategy is ito find cover which just covers those points, but is stillnot a formal (inductive) cover.
32 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
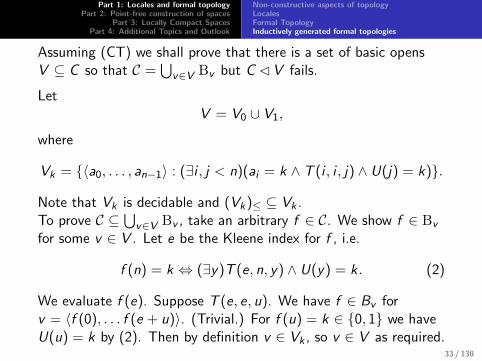
Assuming (CT) we shall prove that there is a set of basic opensV ⊆ C so that C =
⋃v∈V Bv but C C V fails.
LetV = V0 ∪ V1,
where
Vk = 〈a0, . . . , an−1〉 : (∃i , j < n)(ai = k ∧ T (i , i , j) ∧ U(j) = k).
Note that Vk is decidable and (Vk)≤ ⊆ Vk .To prove C ⊆
⋃v∈V Bv , take an arbitrary f ∈ C. We show f ∈ Bv
for some v ∈ V . Let e be the Kleene index for f , i.e.
f (n) = k ⇔ (∃y)T (e, n, y) ∧ U(y) = k . (2)
We evaluate f (e). Suppose T (e, e, u). We have f ∈ Bv forv = 〈f (0), . . . f (e + u)〉. (Trivial.) For f (u) = k ∈ 0, 1 we haveU(u) = k by (2). Then by definition v ∈ Vk , so v ∈ V as required.
33 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Suppose C C V . By definition there is a finite F ⊆ V and m sothat w ∈ F≤ for every w with |w | ≥ m. (In particular C C F .) Weshow this is impossible.
Define a finite sequence w = 〈d0, . . . , dm−1〉 ∈ C by letting
di = 1⇐⇒def i < m ∧ (∃j < m)(T (i , i , j) ∧ U(j) = 0). (3)
Then w ≤ v for some v ∈ F . Since F ⊆ V = V≤ we havew ∈ V = V0 ∪ V1. Suppose w ∈ V0. By (2) there are i , j < mwith di = 0, T (i , i , j) and U(j) = 0. According to (3) this impliesdi = 1 which is a contradiction. Thus w ∈ V1. Hence there arei , j < m with di = 1, T (i , i , j) and U(j) = 1. But by (3) it followsthat U(j) = 0. A contradiction again. Hence C C V is false.
34 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
The example is a straightforward adaptation of a theorem whichshows that the Fan Theorem is incompatible with CT. The originalresult is due to Kleene.
This example shows that the Fundamental Adjunction
Ω a Pt : Top // Loc
cannot be used without further ado to transfer results from spacesto locales in a constructive setting.
It is necessary to develop point-free techniques to obtainconstructive results.
35 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
Point-free proofs are more basic
Theorem (Johnstone 1981): Tychonov’s Theorem holds forlocales, without assuming AC.
Slogan of B. Banaschewski:
choice-free localic argument+ suitable choice principles = classical result on spaces
In fact, Tychonov’s theorem for locales is constructive even in thepredicative sense (Coquand 1992).
36 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Non-constructive aspects of topologyLocalesFormal TopologyInductively generated formal topologies
This suggestive slogan can be generalised
constructive localic argument+ Brouwerian principle = intuitionistic result on spaces.
However, since the work of the Bishop school (BISH) onconstructive analysis it is known that there is often a basic
BISH constructive argument+ Brouwerian principle = intuitionistic result on metric spaces.
A natural question: how does BISH constructive topology andconstructive locale theory relate? For instance on metric spaces.
37 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Formal reals R
The basic neighbourhoods of R are (a, b) ∈ Q2 : a < b giventhe inclusion order (as intervals), denoted by ≤. The cover C isgenerated by
(G1) (a, b) ` (a′, b′) : a < a′ < b′ < b for all a < b,
(G2) (a, b) ` (a, c), (d , b) for all a < d < c < b.
The set of points Pt(R) of R form a structure isomorphic to theCauchy reals R. For a point α with (a, b) ∈ α we have by (G2) e.g.
(a, (a + 2b)/3) ∈ α or ((2a + b)/3, b) ∈ α.
38 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
G1:(—————————————)
...(——————————————–)
...
(———————————————–)
G2:(———–)
(———–)
(——————)
39 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
An elementary characterisation of the cover relation on formal realsis:
(a, b) C U ⇐⇒ (∀a′, b′ ∈ Q)(a < a′ < b′ < b ⇒(∃finite F ⊆ U) (a′, b′)∗ ⊆ F ∗)
Note that for finite F the pointwise inclusion (a′, b′)∗ ⊆ F ∗ isdecidable, since the end points of the intervals are rationalnumbers. (Exercise)This characterization is crucial in the proof of the Heine-Boreltheorem (see Cederquist, Coquand and Negri).
40 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
For any rational number q there is a point in Pt(R);
q = (a, b) ∈ Q2 : a < q < b.
For a Cauchy sequence x = (xn) of rational numbers we define
x = (a, b) ∈ Q2 : (∃k)(∀n ≥ k) a < xn < b
which is a point of R.
Order relations on real numbers α, β ∈ Pt(R):
α < β ⇐⇒def (∃(a, a′) ∈ α)(∃(b, b′) ∈ β) a′ < b
α ≤ β ⇐⇒def ¬(β < α)⇐⇒ (∀(b, b′) ∈ β)(∀(a, a′) ∈ α)a ≤ b′
41 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Closed subspaces
Let X be a formal topology. Each subset V ⊆ X determines aclosed sublocale X \ V whose covering relation C ′ is given by
a C ′U ⇐⇒def a C U ∪ V .
Note that V C ′∅ and ∅C ′V , so the new cover relation identifiesthe open set V with the empty set. What remains is thecomplement of V .
Theorem If X is compact, and U ⊆ X a set of neighbourhoods,then X \ U is compact.
42 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
We define he unit interval by [0, 1] = R \ V whereV = (a, b) : b < 0 or 1 < a. Denote the cover relation of [0, 1]by C ′.
Heine-Borel theorem [0, 1] is a compact formal topology.
Proof. Suppose X C ′U, where X is the basic nbhds of R. Thus inparticular (0− 2ε, 1 + 2ε) C ′U and thus (0− 2ε, 1 + 2ε) C V ∪ U.By the elementary characterisation of C there is a finiteF ⊆ V ∪ U with (0− ε, 1 + ε)∗ ⊆ F ∗. As F is finite, we can prove(0− ε, 1 + ε) C F using G1 and G2. Also we find finiteF1 ⊆ F ∩ U ⊆ U so that (0− ε, 1 + ε) C V ∪ F1. Hence(0− ε, 1 + ε) C ′F1. But X C ′(0− ε, 1 + ε) so X C ′F1.
43 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Open subspaces
Let X be a formal topology. Each set V ⊆ X of neighbourhoodsdetermines an open sublocale X|V whose covering relation C ′ isgiven by
a C ′U ⇐⇒def a ∧ V C U.
Note that U1 C ′U2 iff U1 ∧ V C U2 ∧ V . Hence only the partinside V counts when comparing two open sets.
Example
For two points α, β ∈ R the open interval (α, β) is R|V where
V = (a, b) : α < a & b < β.
44 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Continuous maps relate the covers
Let X = (X ,≤, C ) and Y = (Y ,≤′, C ′) be formal topologies. Arelation F ⊆ X × Y is a continuous mapping X // Y if
I U C ′V =⇒ F−1U C F−1 V , (”preservation of arbitrary sups”)
I X C F−1 Y , (”preservation of finite infs”)
I a C F−1V , a C F−1W =⇒ a C F−1 (V ∧W ).
I a C U, x F b for all x ∈ U =⇒ a F b,
Each such induces a continuous point function f = Pt(F ) given by
α 7→ b : (∃a ∈ α)R(a, b) : Pt(X ) // Pt(Y)
and that satisfies: a F b ⇒ f [a∗] ⊆ b∗.
45 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
The category of formal topologies.
The inductively generated formal topologies and continuousmappings form a category FTop, which is classically equivalent toLoc.They both share many abstract properties with the category oftopological spaces which can be expressed in category theoreticlanguage.This makes it possible to describe topological constructionswithout mentioning points.
46 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Recall: A product of objects A and B in a category C is an objectA×B and two arrows π1 : A×B // A and π2 : A×B // B inC, so that for any arrows f : P // A and g : P // B there is aunique arrow 〈f , g〉 : P // A× B so that π1〈f , g〉 = f andπ2〈f , g〉 = g .
A A× Boo π1A
c
__
f??
????
????
??? A× B B
π2 //A× B
c
OO
〈f ,g〉
B
c
??
g
47 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
The dual notion of product is coproduct or sum.
A coproduct of objects A and B in a category C is an object A + Band two arrows ι1 : A // A + B and ι2 : B // A + B in C, sothat for any arrows f : A // P and g : B // P there is aunique arrow
(fg
): A + B // P so that
(fg
)ι1 = f and
(fg
)ι2 = g .
A A + Bι1 //A
c
f
???
????
????
??A + B Boo ι2A + B
c
(fg
)
B
c
g
48 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
A equalizer of a pair of arrows Af //g
// B in a category C is a
object E and an arrow e : E // A with fe = ge so that for anyarrow k : K // A with fk = gk there is a unique arrow t : K
// E with et = k .
E Ae //E
K
OO
t
A
K
??
k
Bf //
Bg
//
In Top: E = x ∈ A : f (x) = g(x).
Dual notion: A coequalizer of a pair of arrows Af //g
// B in a
category C is a object Q and an arrow q : B // Q with qf = qgso that for any arrow k : B // Q with kf = kg there is a uniquearrow t : Q // K with tq = k. 49 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Categorical topology. As the category of topological spaces haslimits and colimits, many spaces of interest can be built up usingthese universal constructions, starting from the real line andintervals.
The circle(x , y) ∈ R× R : x2 + y2 = 1
is an equaliser of the constant 1 map and (x , y) 7→ x2 + y2.
It can also be constructed as a coequaliser of s, t : ? // [0, 1]where s(?) = 0, t(?) = 1. (Identifying ends of a compact interval.)
50 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
The categorical properties of the category FTop of set-presentedformal topologies ought to be same as that of the category oflocales Loc.
Theorem. Loc has small limits and small colimits.
However, since we are working under the restraint of predicativity(as when the meta-theory is Martin-Lof type theory) this is farfrom obvious. (Locales are complete lattices with an infinitedistributive law.)
51 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
FTop has . . .Limits:• Products• Equalisers• (and hence) Pullbacks
Colimits:• Coproducts (Sums)• Coequalisers• (and hence) Pushouts
Moreover:• certain exponentials (function spaces): X I , when I is locallycompact.
52 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Further constructions using limits and colimits
1. The torus may be constructed as the coequaliser of thefollowings maps R2 × Z2 // R2
(x,n) 7→ x (x,n) 7→ x + n.
2. The real projective space RPn may be constructed ascoequaliser of two maps
Rn+1 × R 6=0// Rn+1
(x, λ) 7→ x (x, λ) 7→ λx.
53 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
3. For A → X and f : A // Y , the pushout gives the attachingmap construction:
X Y ∪f X//
A
X
_
A Yf // Y
Y ∪f X
4. The special case of 3, where Y = 1 is the one point space, givesthe space X/A where A in X is collapsed to a point.
54 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Products of formal topologies
Let A = (A,≤A, C A) and B = (B,≤B , C B) be inductivelygenerated formal topologies. The product topology isA× B = (A× B,≤′, C ′) where
(a, b) ≤′ (c , d)⇐⇒def a ≤A c & b ≤B d
and C ′ is the smallest cover relation on (A× B,≤A×B) so that
I a C AU =⇒ (a, b) C ′U × b,I b C BV =⇒ (a, b) C ′a × V .
The projection π1 : A× B // A is defined by
(a, b) π1 c ⇐⇒def (a, b) C ′A× c
(Second projection is similar.)
55 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Example
The formal real plane R2 = R×R has by this construction formalrectangles ((a, b), (c , d)) with rational vertices for basicneighbourhoods (ordered by inclusion). The cover relation may becharacterized in a non-inductive way as
((a, b), (c , d)) C ′U ⇐⇒(∀u, v , x , y)[a < u < v < b, c < x < y < d ⇒
(∃finite F ⊆ U)(u, v)× (x , y) ⊆ F ∗]
56 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Formal topological manifolds
A formal topology M is an n-dimensional manifold if there are twofamilies of sets of open neighbourhoods Ui ⊆ Mi∈I andVi ⊆ Rni∈I and a family of isomorphisms in FTop
ϕi : M|Ui// (Rn)|Vi
(i ∈ I )
so thatM C Ui : i ∈ I.
57 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Subspaces defined by inequations
Let V ⊆ R2 be the set of open neighbourhoods aboove the graphy = x i.e.
V = ((a, b), (c , d)) ∈ R2 : b < c
Then L = (R2)|V → R2 has for points pairs (α, β) with α < β.Let f , g : X // R be continuous maps. Then form the pullback:
L R2 //
S
L
S X // X
R2
〈f ,g〉
Then the open subspace S → X has for points those ξ ∈ Pt(X )where f (ξ) < g(ξ).
58 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Subspaces defined by inequations (cont.)
Similarly we may define subspaces by non-strict inequalities.Define K = (R2 \ V ) → R2, then K has for points (α, β) ∈ R2
such that α ≥ β.
Replacing L by K is the previous pullback diagram we get thatS → X has for points those ξ ∈ Pt(X ) where f (ξ) ≥ g(ξ).
59 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Coequalizers in formal topology
Coequalizers are used to built quotient spaces, and together withsums, to attach spaces to spaces.
As the category Loc is opposite of the category Frm the
coequalizer of Af //g
// B in Loc can be constructed as the equalizer
of the pair Bf ∗ //
g∗// A in Frm.
As Frm is ”algebraic” the equalizer can be constructed as
E = b ∈ B : f ∗(b) = g∗(b) → Bf ∗ //
g∗// A
60 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Coequalizers in formal topology (cont.)
A direct translation into FTop yields the following suggestion for aconstruction:
U ∈ P(B) : F−1U = G−1U
for a pair of continuous mappings F ,G : A // B between formaltopologies. Here W = a ∈ A : a C W .
Problem: the new basic neighbourhoods U do not form a set.
61 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
It turns out that can one find, depending on F and G , a set ofsubsets R(B) with the property that
F−1U = G−1U, b ∈ U =⇒
(∃V ∈ R(B))(b ∈ V ⊆ U & F−1V = G−1V )
Now the formal topology, whose basic neighbourhoods are
Q = V ∈ R(B) : F−1V = G−1V ,
and whereU C QW iff U C B ∪W
for W ⊆ R(B), defines a coequaliser. Moreover the coequalisingmorphism P : B // Q is given by:
a P U iff a C BU.
62 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Cohesiveness of formal spaces: joining paths
Def The space Y has the Path Joining Principle (PJP) iff : [a, b] // Y and g : [b, c] // Yare continuous functions with f (b) = g(b), then there exists aunique continuous function h : [a, c] // Y , with h(t) = f (t) fort ∈ [a, b], and h(t) = g(t) for t ∈ [b, c].
Theorem Each complete metric space Y satisfies PJP.
63 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
For general metric spaces PJP fails constructively:
Proposition There is a metric space Y (=[−1, 0] ∪ [0, 1]), suchthat if the PJP is valid for Y , then for any real x
x ≤ 0 or x ≥ 0.
However:
Proposition In FTop the PJP holds for any Y .
(Useful for defining fundamental groups.)
64 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
There is a stronger version (HJP) which allows for the compositionof homotopies:
Proposition: Let X be a formal topology. For α ≤ β ≤ γ inPt(R), the diagram
X × [α, β] X × [α, γ]1X×E1
//
X
X × [α, β]
〈1X ,β〉
X X × [β, γ]〈1X ,β〉 // X × [β, γ]
X × [α, γ]
1X×E2
(4)
is a pushout diagram in FTop. Here E1 and E2 are the obviousembeddings of subspaces.
65 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
The following lemma is used in the proof. It may be regarded as a(harmless) point-free version of the trichotomy principle for realnumbers.
Lemma For any point β of the formal reals R let
Tβ = (a, b) ∈ R : b < β or (a, b) ∈ β or β < a.
Then for any U ⊆ R we have
U ∼R U≤ ∩ Tβ.
Here V ∼R W means that V CRW and W CRV .
66 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Real numbersSubspacesCategory of formal topologies
Proof. The covering U≤ ∩ Tβ CRU is clear by the axioms (Tra)and (Ext).
To prove the converse covering, suppose that (a, b) ∈ U. Then itsuffices by axiom (G1) to show (c , d) CRU≤ ∩ Tβ for anya < c < d < b. For any such c, d we have β < c or a < β, by theco-transitivity principle for real numbers. In the former case,(c , d) ∈ U≤ ∩ Tβ, so suppose a < β. Similarly comparing d , b to βwe get d < β, in which case (c , d) ∈ U≤ ∩Tβ, or we get β < b. Inthe latter case we have (a, b) ∈ U≤ ∩ Tβ, so in particular(c , d) C U≤ ∩ Tβ.
67 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Locally compact metric spaces in BISH
Def (Bishop) An inhabited metric space X is locally compact, ifeach bounded subset can be included in some compact subset of X .
Prop Any locally compact space is complete and separable.
Rem Q and (0, 1) are not locally compact in the above sense.
Def A function f : X // Y between a locally compact metricspace X and a metric space Y is continuous, if f is uniformlycontinuous on each compact subset of X .
68 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Constructivity of the Fundamental Adjunction ?
By the adjunction
Ω : Top // Loc −| Pt : Loc // Top
the functor Ω gives a full and faithful embedding of all Hausdorffspaces into locales.
However, the functor Ω yields only point-wise covers in Loc, soΩ(0, 1ω) is not compact, (unless e.g. the Fan Theorem isassumed). The localic version of the Cantor is compact, as wehave seen.
To embed the locally compact metric spaces used in BISH we needa more refined functor.
69 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Localic completion (S. Vickers)
For any metric space (X , d) its localic completion M =MX is aformal topology (M,≤M, CM) where M is the set of formal ballsymbols
b(x , δ) : x ∈ X , δ ∈ Q+.
These symbols are ordered by formal inclusion
I b(x , δ) ≤M b(y , ε)⇐⇒ d(x , y) + δ ≤ εI b(x , δ) <M b(y , ε)⇐⇒ d(x , y) + δ < ε.
70 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
71 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
The cover is generated by
(M1) p C q ∈ M : q < p, for any p ∈ M,
(M2) M C b(x , δ) : x ∈ X for any δ ∈ Q+,
The points of MX form a metric completion of X . There is ametric embedding
jX = j : X // Pt(MX )
given byj(u) = b(y , δ) : d(u, y) < δ.
Moreover, jX is an isometry in case X is already complete.
For X = Q, we get the formal real numbers modulo notation forintervals b(x , δ) = (x − δ, x + δ).
72 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Remarks Countable choice is used to prove the isometry-
The covering relation is in the case when X is the Baire space isgiven by an infinite wellfounded tree. Must allow generalisedinductive definitions in the meta theory.
73 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Theorem (Vickers) Let X be a complete metric space. Then: Xis compact iff MX is compact.
Theorem 2 (P.) If X = (X , d) is locally compact, then MX islocally compact as a formal topology, i.e. p C q ∈ M : q p forany p.
Here the way below relation is
q p iff for every U: p C U implies there is some finitelyenumerable (f.e.) U0 ⊆ U with q C U0.
74 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Elementary characterisation of the cover of MX
Refined cover relations
U ≤ V ⇐⇒df (∀p ∈ U)(∃q ∈ V )p ≤ q
Note: If U ≤ V , then U C V . (Similar extension for <)
p vε U ⇔df (∀q ≤ p)[radius(q) ≤ ε⇒ q ≤ U]
Write p v U iff p vε U for some ε ∈ Q+.
Note: If p v V , then p C V .
75 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Any sufficiently small disc included in the inner left disc “slips”into one of the dashed discs.
76 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Elementary characterisation of the cover of MX
Lemma 4 Let X be locally compact. Let δ ∈ Q+. For any formalballs p < q there is a finitely enumerable C such that
p v C < q
where all balls in C have radius < δ.
Remark: In fact, this is as well a sufficient condition for localcompactness.
Let A(p, q) = C ∈ Pfin.enum.(MX ) : p v C < q.
77 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Elementary characterisation of the cover of MX
The following cover relation is generalising the one introduced byVermeulen and Coquand for R:
a l U ⇔df (∀b < c < a) (∃U0 ∈ A(b, c)) U0 < U.
Theorem 3 If X is a locally compact metric space, then
a C U ⇐⇒ a l U
(⇐ holds for any metric X space.)Proof of ⇒ goes by verifying that l is a cover relation satisfying(M1) and (M2).
78 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Let f : X // Y be a function between complete metric spaces.Define the relation Af ⊆ MX ×MY by
a Af b ⇐⇒df a C p : (∃q < b)f [p∗] ⊆ q∗
Here b(x , δ)∗ = B(x , δ).
Lemma 5 Af :MX//MY is a continuous morphism between
formal topologies, whenever X is locally compact and f iscontinuous.
Define thus M(f ) :MX//MY as Af
Remark Classically, a Af b is equivalent to f [a∗] ⊆ b∗. However,this definition does not work constructively.
79 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Embedding Theorem
Embedding Theorem: The functor M : LCMet // FTop is afull and faithful functor from the category of locally compactmetric spaces to the category of formal topologies. It preservesfinite products.
Explanation: Suppose that X and Y are locally compact metricspaces.M faithful means: For f , g : X // Y continuous functions
f = g ⇐⇒M(f ) =M(g)
M full means: any continuous mapping F :M(X ) //M(Y ) isthe comes from some (unique) continuous function f : X // Y :
F =M(f ).
80 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
That M preserves binary products means e.g. that if
X oo π1X × Y
π2 // Y
is a product diagram, then so is:
M(X ) oo M(π1) M(X × Y )M(π2) //M(Y ).
HenceM(X × Y ) ∼=M(X )×M(Y ).
Since we have M(R) ∼= R we may then lift any continuousoperation f : Rn // R from Cauchy reals to formal realsM(f ) : Rn // R.
81 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Theorem For F ,G : Rn // R and f = Pt(F), g = Pt(G) : Rn
// R we have
F ≤ G ⇐⇒ (∀x)f (x) ≤ g(x).
Here F ≤ G is defined via factorization through a closed sublocale,as follows: For F ,G : A // R continuous we say that F ≤ G iff〈G ,F 〉 : A // R2 factorizes through
R2 \ V → R2
where V = ((a, b), (c , d)) ∈ R2 : b < c.
82 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
There is a characterisation of maps into closed subspaces. For aset of neighbourhoods W ⊆ Y let Y \W denote the correspondingclosed sublocale, and let E−W : Y \W → Y be the embedding.
Let F : X // Y be a continuous morphism. TFAE:
I F factors through E−W .
I F−1W C X∅.I F : X // (Y \W ) is continuous.
Def F : X // R is non-negative if it factorises through R \ N,where N is the set of b(x , δ) with x < δ.
83 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
The previous theorem may be used prove equalities and inequalities(≤) for formal real numbers by standard point-wise proofs. Resultsof constructive analysis are readily reused.More generally we have
Theorem Let X be a locally compact metric space. ForF ,G :M(X ) // R and f = Pt(F), g = Pt(G) : X // R wehave
F ≤ G ⇐⇒ (∀x ∈ X )f (x) ≤ g(x).
84 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
It would also be desirable to reuse results about strict inequalities(<). There is however no such straightforward ”transfer theorem”as for ≤.
This is connected to the problem of localising infima of continuousfunctions [0, 1] // R, which we consider as a preparation.
85 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
The infimum problem on compact sets
Problem: In BISH find a positive uniform lower bound of auniformly continuous function f : [0, 1] // (0,∞).
This is impossible by results of Specker 1949, Julian & Richman1984 using a recursive (computable) interpretation.
(Classically, f attains its minimum.)
However in Brouwerian intuitionism (INT), a uniform lower boundcan be found using the FAN theorem.
86 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
87 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
In Bishop’s constructive analysis this phenomenon is seriousproblem. ( P. Schuster: What is continuity, constructively?) Weought to have(*) The composition of two continuous functions is continuous.
Consider, however, the composition of f with the reciprocal:
[0, 1]f // (0,∞)
1/(·) // R.
If 1/f is uniformly continuous, we can find an upper bound of thefunction on the compact the compact interval [0, 1]. But thismeans that we can also find a uniform lower bound of f .
One concludes that (*) fails. The two versions of continuity areincompatible.
Point-free topology has a solution.
88 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Open subspaces
X|G — the open subspace of X given by a set of formal nbds G .E|G : X|G // X — the associated embedding.
Lemma Let F : X // Y be a continuous morphism betweenformal topologies. Let G ⊆ Y be a set of nbds. TFAE:
I F factorises through E|G : Y|G // YI X C F−1[G ]
I F : X // Y|G is continuous.
Def F : X // R is positive if it factorises through R|P , where Pis the set of b(x , δ) with x > δ.
The above Lemma gives several ways to prove positivity.
89 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Locally uniformly positive maps
Let X be a metric space. A function f : X // R is locallyuniformly positive (l.u.p) if for every x ∈ X and every δ > 0 thereis some ε > 0 so that for all y ∈ Y
d(y , x) < δ =⇒ f (y) > ε.
Theorem Let X be a locally compact metric space, and supposef : X // R is continuous. Then f is l.u.p. if, and only if,M(f ) :M(X ) // R is positive.
Corollary M(f ) <M(g) ⇐⇒ g − f is l.u.p.
90 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Proof of Theorem (⇐): Suppose M(f ) is positive. Using Theorem3 we obtain
M(X ) lM(f )−1[G ].
Let x ∈ X and δ > 0. Then consider neighbourhoodss = b(x , δ) < s ′ < p. Thus we have some p1, . . . , pn < s ′ with
s v p1, . . . , pn <M(f )−1[G ]
Thus there are qi > pi and ri ∈ G , i = 1, . . . , n, satisfyingf [(qi )
∗] ⊆ (ri )∗. Thereby
f [s∗] = f [b(x , δ)∗] ⊆ f [p∗1] ∪ · · · ∪ f [p∗n] ⊆ (r1)∗ ∪ · · · ∪ (rn)∗.
From which follows
f [B(x , δ)] = f [b(x , δ)∗] ⊆ (ε,∞),
so f is indeed l.u.p.91 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Continuous maps between open subspaces
(Work in progress)
Let X and Y be locally compact metric spaces. For open subsetsU ⊆ X and V ⊆ Y a suitable definition of continuous map U
// V in BISH is:
f : U // V is continuous iff for every totally bounded S b U,
C1) f is uniformly continuous on S andC2) f [S ] b V .
Here S b U ⇔def (∃t > 0)(x ∈ X : d(x ,S) ≤ t ⊆ U).
92 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Note that the meaning of b is strongly dependent on theunderlying space X :
Write Sr for x ∈ X : d(x ,S) ≤ t.
I X = [0, 1]: Then S = [0, 1] is totally bounded and Sr = [0, 1]for any r . Hence S b X .
I For Y = V = R, we get the standard notion of (uniform)continuity: [0, 1] // R.
I For Y = R and V = (0,+∞), we get uniformly continuousfunctions which are uniformly positive.
I X = R, U = (0,+∞): Note that S = (0, 1) is totallybounded, but we do not have S b U. The reciprocal will becontinuous (0,+∞) // R.
93 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Thm Let X and Y be locally compact metric spaces. For formalopen (and saturated) A ⊆MX and B ⊆MY , a continuousmorphism
F : (MX )|A // (MY )|B
induces a point function f : A∗ // B∗ which satisfies thefollowing conditions: for every totally bounded S <∗ A
K1) f is uniformly continuous on S andK2) f [S ] <∗ B.
Here S <∗ A⇔def (∃ f.e. F ⊆MX ) S ⊆ F∗& F < A.
94 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
The continuity conditions K1-2 generalize the standard C1-2.
For any open U ⊆ X , there is a largest formal open saturatedA(U) = a ∈MX : a∗ ⊆ U. We have
Lemma: S <∗ A(U)⇐⇒ S b U.
We have a converse to the previous theorem.
Thm If f : A∗ // B∗ is K-continuous then Af : (MX )|A// (MY )|B is a continuous mapping.
95 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Recall that a metric space X is totally bounded if for any ε > 0there is a nonempty finitely enumerable subset x1, . . . , xn ⊆ X(called an ε-net) so that
X ⊆ B(x1, ε) ∪ · · · ∪ B(xn, ε).
Here B(x , ε) = y ∈ X : d(x , y) < ε. The space is compact if inaddition it is complete.
Unlike classical topological spaces and unlike formal topologiesclosed subspaces of compact metric spaces are not necessarilycompact.
96 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Brouwerian counter example:
Consider the following closed subspace of [0, 1]:
K = 0 ∪ 1 : P
where P is some arbitrary proposition.
If K was compact, we could ask for 1/3-net of K . Say it isx1, . . . , xn. By definition of a net, we have xk ∈ K for all k . Ifxk > 1/3 then xk = 1, and if xk < 2/3, then xk = 0. Checking forall k = 1, . . . , n, we may thus decide whether P or ¬P.
We conclude if every closed subspace of [0, 1] is compact, thenPEM holds.
97 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Recall: for complete metric spaces X we have
X is compact iff M(X ) is compact.
So, taking X = [0, 1], then M =M([0, 1]) is compact. We knowthat M \ U is compact as a formal topology for any U ⊆ M.We easily construct U so that there is an isometry
Pt(M \ U) ∼= K
where K is as in the counter example. Hence Pt(M \ U) need notbe compact as a metric space.
98 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Overtness
Thus we must require something more than compactness of M \ Uto guarantee that Pt(M \ U) is compact in the metric sense.
The notion of overtness may be used to get a localic counterpartto Bishop’s notion of compactness (P. Taylor 2000). See also T.Coquand and B. Spitters (2007) Computable sets: located andovert locales.
99 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
A formal topology X = (X ,≤, C ) is overt if there is a set P ⊆ Xof neighbourhoods that are positive, which means
I P is inhabited,
I a C U, a ∈ P ⇒ U ∩ P is inhabited,
I U C U ∩ P.
This P is necessarily unique if it exists.P is usually called a positivity predicate for X .
Remark. In classical set theory, any formal topology X is overt,provided it hasa least one neighbourhood which is not covered by∅. We may take
P = a ∈ X : ¬a C ∅.
The notion is thus exclusively of constructive interest.
100 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
The following is implicit in (Coquand and Spitters 2007) asexplained by Coquand.
Theorem Let X be a metric space and let M =M(X ) be its localcompletion. Let U ⊆ M be such that M \ U is compact and overt.Then Pt(M \ U) is compact in the metric sense.
To prove it we use:
Lemma: Let U ⊆ M be such that M \ U is overt. If a is a positiveneighbourhood of M \ U, then α ∈ a∗ for some α ∈ Pt(M \ U).
101 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Proof of Lemma: Suppose that P is the positivity predicate ofM \ U. Denote the cover relation of M \ U by C ′.Suppose a = b(x , δ) ∈ P. Let a1 = a. Suppose we haveconstructed in P:
a1 ≥ a2 ≥ · · · ≥ an,
so that radius(ak+1) ≤ radius(ak)/2.By (M1) and localisation we get
an C ′an ∧ b(y , ρ) : y ∈ X
where ρ = radius(an)/2. Since an ∈ P we obtain someb ∈ an ∧ b(y , ρ) : y ∈ X with b ∈ P. Clearlyradius(b) ≤ radius(an)/2. Let an+1 = b.
102 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Letα = p ∈ M : (∃n)an ≤ p
Since the radii of an are shrinking, this defines a point in Pt(M).(Note that we used Dependent Choice.)
We claim that α ∈ Pt(M \ U) = Pt(M) \ U∗. Suppose thatα ∈ U∗, i.e. for some c ∈ U: c ∈ α. Hence there is n with an ≤ c .Thus an C U, that is an C ′∅. But since an is positive, this isimpossible! So α ∈ Pt(M \ U).
103 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Proof of Theorem: Let P and C ′ be as in the proof of Lemma.Let ε > 0 be given. Then by axiom M2 and positivity
M C ′b(x , ε/2) : x ∈ XC ′b(x , ε/2) : x ∈ X ∩ P.
By compactness there is some finitely enumerableF = b(x1, ε/2), . . . , b(xn, ε/2) ⊆ b(x , ε/2) : x ∈ X ∩ P so that
M C ′F . (5)
Since each b(xi , ε/2) is positive there is by Lemma someαi ∈ b(xi , ε/2)∗ which is in Pt(M \ U). By (5) it follows that eachpoint in Pt(M \ U) has smaller distance than ε to some point αi .Thus α1, . . . , αn is the required ε-net.
104 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Domains and Formal topology
For certain purposes it is desirable to generalize the real numbersystem to include also non-computable reals or partially determinedreal numbers (a la interval analysis); see Richman 1998 and alsoNegri 2002.
We may do this for formal real numbers R by dropping one orboth of the axioms
(M1) p C q ∈ M : q < p, for any p ∈ M,
(M2) M C b(x , δ) : x ∈ X for any δ ∈ Q+.
If we drop both (M1) and (M2) we get R0 whose points arenon-empty and filtering sets. For instance the interval
”[x , y ]” = (a, b) ∈ Q2 : a < x < y < b
is a point in R0.105 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
For an arbitrary formal topology X the points Pt(X ) are partiallyordered by inclusion. In many spaces of interest (e.g. regularspaces) the points α are maximal in this order, i.e. forα, β ∈ Pt(X )
α ⊆ β =⇒ α = β.
(If all points are maximal, then X is called a T1-topology.)
Thm. If X is a formal topology, then (Pt(X ),⊆) is a directedcomplete partial order.
Indeed the theory of formal topologies may be regarded ageneralization of domain theory (Martin-Lof, Sambin).A formal topology X = (X ,≤X , C X ) is unary if
a C X U =⇒ (∃b ∈ U) a ≤X b.
In such a topology a↑ = b ∈ X : a ≤X b is a point, for anya ∈ X .
106 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
A pre-order (X ,≤) is a consistently complete lower semi-latticepre-order (CLSP) if it has a largest element T and for anyconsistent pair x , y ∈ X , i.e. which has a lower bound t ≤ x andt ≤ y , there is an element x ∧ y satisfying (a) and (b) above.
Theorem. (Sambin, Valentini, Virgili) If X is a unary formaltopology, where (X ,≤X ) is a CLSP, then D = (Pt(X ),⊆) is aScott domain.
107 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Define the Scott compactification X0 of X : For a formal topologyX define ≤X0 by
a ≤X0 b ⇐⇒ a C X b
and define C X0 by
a C X0 U ⇐⇒ (∃b ∈ U)a ≤X0 b.
Let X0 = (X ,≤X0 , C X0). We have
Theorem. If (X ,≤) is CLSP
(a) X0 is a unary formal topology,
(b) Pt(X ) ⊆ Pt(X0),
(c) Pt(X ) ∩ extX0(U) = extX (U)
Here is extX (U) is the set of points in X who contains someneighborhood of U.
108 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Let F : S // T be a continuous map between arbitrary formaltopologies. Then the point function f = Pt(F ) : Pt(S)
// Pt(T ) preserves directed suprema, i.e.
f (∪i∈Iαi ) = ∪i∈I f (αi )
for directed sets αi (i ∈ I ) of points.
109 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Lifting maps from spaces to domains
Theorem (P. 2007) Let F : S // T be a continuous mapbetween LSP formal topologies. Then F0 = F is also a continuousmap from S0 to T0 with makes this lifting square commute:
S TF
//
S0
S
OO
HS
S0 T0F0 // T0
T
OO
HT
.
Here HX : X // X0 is the natural embedding.LSP= the preorder is a lower semilattice.
110 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Predicativity and formalization in type theory
There are two main formal systems intended for the formalizationof Bishop constructivisim.
1. Constructive set theory CZF which uses the ordinaryset-theoretic language. A central feature is that there are no powersets and that separation (x ∈ X : ϕ) may only be done usingrestricted (bounded) formulas ϕ.
2. Martin-Lof type theory, for which a lot of computerimplementations/formalizations of constructive mathematics havebeen done. We shortly indicate such a system MLTT which hassimilar features to CZF.
111 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
The basic set-like objects — setoids – are types with equivalencerelations: A = (|A|,=A). Functions are operations on types thatrespect equivalence relations. The setoids form a category. (Seefor instance Palmgren 2005, Bishop’s set theory.)
MLTT has a type U of small types. An equivalence relation is saidto be small if a =A b : U. A setoid A is small if |A| : U and =A issmall.
A setoid X is a set if X is isomorphic to a small setoid. X is a classif it isomorphic to a setoid with small equivalence relation.
Sets and Classes then relate in the same ways as in CZF.
The subsets of a given set X form a class P(X ), which is not aset. Even P(?) is not a set!
112 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
For a formal topology X we have:
A cover relation may be regarded as a (closure) operator
U 7→ a ∈ X : a C U : P(X ) // P(X )
A point α is an element of P(X ).
If we consider set-presented formal topologies:
I Pt(X ) will be a class.
I HomFTop(X ,Y ) is a class
I The possible covers relation on X ,≤ forms a class.
113 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
A point α is partial if it is properly contained in some point β.
Notably, the Scott compactifications X0 of non-trivial formaltopologies X contain partial points.
Let X be a formal topology with partial point α ⊂ β.For any proposition Q, define a new point
αQ = x ∈ β : x ∈ α or Q
Then αQ = β iff Q is true.
Then Pt(X ) is not a set, since we are able to embed the powerclass P(?) in Pt(X )
114 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
X has only maximal points iff for all α, β ∈ Pt(X )
α ⊆ β =⇒ α = β.
Reading u ∈ α as α is a point of the formal open u, this becomesnothing but the T1-separation axiom. (Every formal topology is T0
accordingly: ⊆ is antisymmetric.)
Theorem (P. 2002) If X is a set-presented T1-topology, thenPt(X ) is a set.
Remark. Classically, every space which is not T1 has a partialpoint.
115 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Function spaces need not be sets
For fixed formal topologies X and Y , an approximable mappingR : X // Y is given by a subset of X × Y . Thus the collectionof such mappings
Cont(X ,Y ) = HomFTop(X ,Y )
is prima facie merely a class.
Indeed, it maybe a proper class since Cont(1,Y ) ∼= Pt(Y ) and thelatter is a proper class, for Y with partial points.However, for some important classes of spaces they turn out to besets, just as for point-based topology.
116 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Regular topologies
Recall: In a regular topology X a basic neighbourhood a is coveredby b : b ≪ a the basic neighbourhoods “well inside” theneighbourhood.
b ≪ a =⇒ X C b⊥ ∪ a
Thm (Sambin) The points of a regular formal topology X aremaximal.Proof. Suppose α ⊆ β are points of X . Let a ∈ β. We havea C b ∈ X : b ≪ a, so b ∈ β for some b ≪ a.
117 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Let c ∈ α be some neighourhood. Then by definition of ≪
c C b⊥ ∪ a
Now since α is a point either 1) a ∈ α or 2) there is somed ∈ b⊥ ∩ α. In case 2),
d ∧ b C ∅.
Also d ∈ β, since α ⊆ β. By the filtering property of β, there issome e ∈ d ∧ b with e ∈ β. But e C ∅. This is incompatible with βbeing a point. Case 2) is thus impossible.Hence a ∈ α. We have shown β ⊆ α, and so α = β.
118 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
This result may be generalised to certain Cont(X ,Y ). Introducethe familiar graph order ⊆ between approximable mappings.
Thm 1 If Y is regular, then the mappings in Cont(X ,Y ) are allmaximal with respect to ⊆.
Thm 2 If X and Y are set-presented and Y is regular, thenCont(X ,Y ) is a set.
Rem. Curi proved Thm 2 in the case where X is locally compact.
119 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
References
Classical locale theory
I P.T. Johnstone. Stone Spaces. Cambridge University Press1982.
I P.T. Johnstone. The point of pointless topology. Bull. Amer.Math. Soc. 8(1983), pp. 41 – 53.
I F. Borceux. Handbook of Categorical Algebra 3: Categories ofSheaves. Cambridge University Press 1994.
I S. Vickers. Topology via Logic. Cambridge University Press1989.
I A. Joyal and M. Tierney. An extension of the Galois theory ofGrothendieck. Memoirs Amer. Math. Soc. 309 (1984).
120 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Classical locale theory (cont.)
I B. Banaschewski and C.J. Mulvey. A constructive proof of theStone-Weierstrass theorem. J. Pure Appl. Algebra 116(1997),25 – 40.
I J. Vermeulen. Constructive Techniques in Functional Analysis.PhD Thesis, Sussex University, 1986.
121 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Some seminal works on formal topology
I P. Martin-Lof. Notes on Constructive Mathematics. Almkvist& Wiksell. Stockholm 1970.
I FG M.P. Fourman and R.J. Grayson. Formal spaces. In: A.S.Troelstra and D. van Dalen (eds.) The L.E.J. BrouwerCentenary Symposium, North-Holland 1982, pp. 107 – 122.
I G. Sambin. Intuitionistic formal spaces — a firstcommunication. In: D. Skordev (ed.) Mathematical logic andits Applications, Plenum Press 1987, pp. 187 – 204.
I T. Coquand. An intuitionistic proof of Tychonoff’s theorem.J. Symbolic Logic 57(1992), pp. 28 – 32.
122 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Formal topology
I P. Aczel. Aspects of general topology in constructive settheory. Ann. Pure Appl. Logic 137(2006), 3 – 29.
I G. Curi. Geometry of Observations: some contributions to(constructive) point-free topology. PhD Thesis, Siena 2004.
I G. Sambin. Some points in formal topology. TheoreticalComputer Science 305 (2003), 347 – 408.
I S. Vickers. Compactness in locales and in formal topology.Annals of Pure and Applied Logic 137(2006), 413 – 438.
I S. Vickers, Sublocales in formal topology. Journal of SymbolicLogic 72(2007), 463–482.
123 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Formal topology (cont.)
I S. Negri and D. Soravia. The continuum as a formal space.Arch. Math. Logic 38 (1999), no. 7, 423 – 447.
I I. Sigstam. Formal spaces and their effective presentations.Arch. Math. Logic 34(1995), 211 – 246.
I E. Palmgren. From intuitionistic to point-free topology: someremarks on the foundation of homotopy theory. (Submitted)
I T. Coquand and G. Sambin (eds.) Special issue with papersfrom the second workshop on formal topology. Annals of Pureand Applied Logic 137 (2006).
124 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Localic completion of metric spaces
I T. Coquand and B. Spitters. Computable sets: located andovert locales. Preprint 2007. ArXiv:math/0703561v1.
I E. Palmgren. A constructive and functorial embedding oflocally compact metric spaces into locales. Topology and itsApplications, 154 (2007), 1854 – 1880.
I E. Palmgren. Resolution of the uniform lower bound problemin constructive analysis. Mathematical Logic Quarterly, 54(2008), 65 – 69.
I S. Vickers. Localic completion of generalized metric spaces I.Theory and Applications of Categories 14(2005), 328 – 356.
I S. Vickers. Localic completion of generalized metric spaces II.Preprint 2004.
125 / 130
Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Domain theory and formal topology
I G. Sambin, S. Valentini and P. Virgili (1996). Constructivedomain theory as a branch of intuitionistic pointfree topology.Theoretical Computer Science, 159 (1996), 319 – 341.
I I. Sigstam and V. Stoltenberg-Hansen. Representability oflocally compact spaces by domains and formal spaces.Theoretical Computer Science 179(1997), 319 – 331.
I V. Stoltenberg-Hansen and J.V. Tucker. Effective algebras.In: S. Abramsky et al. Handbook of Logic in ComputerScience, vol. 4. Oxford University Press.
I S. Negri. Continuous domains as formal spaces. MathematicalStructures in Computer Science. 12(2002), 19 – 52.
126 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Predicativity issues in formal topology
I G. Curi. On the collection of points of a formal space. Ann.Pure Appl. Logic 137(2006), 126 – 146.
I G. Curi. The points of (locally) compact regular formaltopologies. In: P. Schuster, U. Berger and H. Osswald (eds.)Reuniting the Antipodes. Kluwer Academic Publishing, pp. 39– 54.
I T. Coquand, G. Sambin, J. Smith, S. Valentini. Inductivelygenerated formal topologies. Ann. Pure Appl. Logic 124(2003), 71 – 106.
127 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Predicativity issues in formal topology (cont.)
I M.E. Maietti. Predicative exponentiation of locally compactformal topologies over inductively generated ones. In: L.Crosilla and P. Schuster (eds.), From Sets and Types toTopology and Analysis: Towards Practicable Foundations ofConstructive Mathematics, Oxford Logic Guides, OxfordUniversity Press 2005.
I E. Palmgren. Maximal and partial points in formal spaces.Ann. Pure Applied Logic. Annals of Pure and Applied Logic2006.
128 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Other references
I E. Bishop and D.S. Bridges. Constructive Analysis. Springer1985.
I D.S. Bridges and F. Richman. Varieties of ConstructiveMathematics. Cambridge University Press 1987.
I F. Richman. Generalized real numbers in constructivemathematics. Indagationes Mathematicae 9, 595 606 (1998)
I E. Palmgren. On universes in type theory. In: G. Sambin andJ. Smith (eds.) Twenty-Five Years of Constructive TypeTheory. Cambridge Univ. Press 1998.
I E. Palmgren. Bishop’s set theory. Slides for TYPES Summerschool 2005. URL: www.math.uu.se/˜palmgren
I V. Stoltenberg-Hansen and J.V. Tucker. Effective algebras.In: S. Abramsky et al. Handbook of Logic in ComputerScience, vol. 4. Oxford University Press.
129 / 130

Part 1: Locales and formal topologyPart 2: Point-free construction of spaces
Part 3: Locally Compact SpacesPart 4: Additional Topics and Outlook
Overt formal topologiesDomains and Formal topologyPredicativity and formalization issues
Other references (cont.)
I P. Schuster. What is continuity, constructively?
I P. Taylor. Geometric and higher order logic in terms of ASD.Theory and Applications of Categories 7(2000), 284–338.
I W. Julian and F. Richman. A uniformly continuous functionon [0, 1] that is everywhere different from its infimum. PacificJournal of Mathematics 111(1984), 333–340.
I E. Specker. Nicht konstruktiv beweisbare Satze der Analysis.Journal of Symbolic Logic 14(1949), 145 – 158.
I D.S. Bridges. Constructive Functional Analysis. ResearchNotes in Mathematics, 28, Pitman 1979.
130 / 130