Planetary Gaps in Dust and Gasjudits/Ms_Binkert_v1.pdf · 2019. 11. 15. · nebular hypothesis. The...
52
Planetary Gaps in Dust and Gas Fabian Binkert November 15, 2019 A thesis presented for the degree of Master of Science ETH in Physics Supervisor: Dr. Judit Szul´ agyi Institute for Particle Physics and Astrophysics ETH Z¨ urich Switzerland 1
Transcript of Planetary Gaps in Dust and Gasjudits/Ms_Binkert_v1.pdf · 2019. 11. 15. · nebular hypothesis. The...
-
Planetary Gaps in Dust and Gas
Fabian Binkert
November 15, 2019
A thesis presented for the degree ofMaster of Science ETH in Physics
Supervisor: Dr. Judit Szulágyi
Institute for Particle Physics and AstrophysicsETH ZürichSwitzerland
1
-
Abstract
Awesome abstract goes here.
2
-
Contents
1 Introduction 5
2 Overview 72.1 Formation Scenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Circumstellar Disks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Dust . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4 The ”ALMA Revolution” . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.5 Planet-Disk Interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.6 Numerical Modelling of Circumstellar Disks . . . . . . . . . . . . . . . . . . 15
2.6.1 Overview and Challenges . . . . . . . . . . . . . . . . . . . . . . . . 152.6.2 Hydrodynamical Simulations . . . . . . . . . . . . . . . . . . . . . . 152.6.3 Dust Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.7 Current State of the Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
I Theory and Background 19
3 Physical Model 193.1 Gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Dust . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Dust-Gas Interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Computational Fluid Dynamics: The Basics 224.1 Conservation Laws . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.2 The Riemann Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 Riemann Problem for the Isothermal Euler Equations . . . . . . . . 234.2.2 Riemann Problem for the Pressure-Less Euler Equations . . . . . . . 25
4.3 Finite Volume Discretization and Godunov’s Scheme . . . . . . . . . . . . . 264.4 Riemann Solvers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.5 Operator Splitting and Source Terms . . . . . . . . . . . . . . . . . . . . . . 284.6 Fluid Dynamics in a Rotating Frame and Spherical Coordinates . . . . . . . 28
4.6.1 The Pressure-less Euler Equations in Spherical Coordinates . . . . . 294.6.2 Rotating Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.6.3 Co-Rotating Frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.7 Godunov’s Method in 3D Spherical Coordinates . . . . . . . . . . . . . . . . 35
5 The JUPITER Code 37
II Development of the Dust Solver 38
3
-
6 Numerical Methods 386.1 Splitting Source and Transport Steps . . . . . . . . . . . . . . . . . . . . . . 386.2 Transport Step in 1 Dimension . . . . . . . . . . . . . . . . . . . . . . . . . 386.3 Transport Step in 3 Dimensions/Spherical coordinates/Rotating Frame . . . 386.4 Pressure-Less Riemann Solver . . . . . . . . . . . . . . . . . . . . . . . . . . 396.5 Source Step - Fluid Coupling . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7 Coding and Testing 457.1 2D Isothermal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.2 3D Isothermal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.3 3D Radiative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.4 Radial Drift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467.5 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8 2D vs. 3D 46
9 Isothermal vs. Radiative 46
III Simulations and Results 46
10 Simulations 4610.1 Initial and Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . 46
10.1.1 Radial Drift and Disk Lifetime . . . . . . . . . . . . . . . . . . . . . 46
11 Discussion 4711.1 Limitation of the pressureless fluid approach . . . . . . . . . . . . . . . . . . 47
4
-
1 Introduction
It is widely accepted that planets are born in rotating disks of gas and dust around youngstars. But there are still many open questions on how and when they form. In this thesiswe study observable features disks around young stars which might be induced by formingplanets. It is possible that the observable features provide a way to constrain planetaryproperties. The fact that there are still open questions on the formation of planets mayseem surprising because planets in our solar system have been observed for hundreds ofyears already. The root of the current understanding on how planets from can be tracedback to the 18th century and Immanuel Kant who proposed what is known today as thenebular hypothesis. The nebular hypothesis states that planets form from material of acollapsing cloud of dust and gas around a young star (for an overview on early theories andthe origin of the solar system we refer to [Woolfson, 1993]). Still, the nebular hypothesiscan not explain how the solar system has arrived at its current configuration with eightplanets (Mercury, Venus, Earth, Mars, Jupiter, Saturn, Uranus and Neptune) and count-less smaller bodies orbiting on their current orbits. In 1992 planetary science entered a newera when Aleksander Wolszczan and Dale Frail discovered the first planet outside our solarsystem (around a pulsar type star), a so called exoplanet [Wolszczan and Frail, 1992]. In1995 Michel Mayor and Didier Queloz discovered the first exoplanet which orbits a solar-type star [Mayor and Queloz, 1995]. For their work, the two astronomers received theNobel Price in Physics 2019. In late 2019, more than 4000 exoplanets have been discoveredand our understanding of the formation of planets has massively improved. When a couldof interstellar dust collapses under its own gravity the cloud gets hotter and denser untileventually the core of the cloud becomes so dense and hot that nuclear fusion starts and astar is born. However, not all of the gas and dust in the collapsing cloud gets turned into astar. Due to the conservation of angular momentum, the collapsing cloud forms a rotatingdisk around the young stellar core, the circumstellar disk. An artist’s impression of such adisk is shown in figure 1. Today we believe that these disks are the birthplaces of planets.In 2018, the first exoplanet surrounded by its circumstellar disk was discovered aroundthe star PDS 70 [Keppler et al., 2018]. Unfortunately, less than 10 planets or planetarycandidates which are embedded in a circumstellar disk have been discovered since. It isis very difficult to directly observe young planets in these disks with current astronomicaltechniques. Therefore, there is very little observational data on forming planets whichwould be vital to fill the gaps in the theory on planet formation.In the second decade of the 21st century, a new generation of radio telescopes has been com-missioned with which time high resolution astronomical observations of circumstellar diskshave become possible for the first time. The largest radio telescopes are assemblies of manyindividual telescopes which work together and are called interferometers. The AtacamaLarge Millimeter/submillimeter Array (ALMA) was commissioned in 2013 and is one ofthe most capable radio interferometers in astronomy. Since 2013, ALMA has provided im-ages of circumstellar disks with unprecedented details. Surprisingly, the observations have
5
-
Figure 1: Artists impression of a disk of gas and dust around a young star. It is believedthat planets form in disks like these. (credit: NASA)
revealed a multitude of substructures in circumstellar disks. Rings, gaps, spirals, asymme-tries and cavities were observed in these disks. Even though many theories have emergedto explain the observed structures, their origin is still being debated. One of the favoriteexplanations, which is also most relevant for this thesis, is that the observed structures arecaused by young planets orbiting in the disk. However, the planets which potentially causethe observed structures have not been observed. An alternative to studying the disks withastronomical observations directly is to study the disks with physically accurate computersimulations. However, many complex physical processes happen in a disk. There are inter-actions between dust and gas components, stellar irradiation can heat the gas or the dust,thermal radiation cools. Magnetic fields are present and chemical processes take place. Toincorporate all the physical and chemical processes in a numerical simulation is not pos-sible today because of the limitations of available computational resources. And it seemslike this will not change on the near future. Therefore, numerical studies usually focuson one or two physical processes which are then incorporated in a computer simulation.The numerical study of observational features in circumstellar disks requires the accuratenumerical treatment of the distribution and temperature of mm-sized dust particles. Thisis because ALMA observes in the radio wavelengths part of the electromagnetic spectrumwhich in circumstellar disks is dominated by the thermal emission of mm-sized dust parti-cles. The distribution of these dust particles is mainly influenced by the distribution of thegas in the circumstellar disk. The temperature is mainly determined by the stellar irradi-ation. An accurate model of observable disk features in circumstellar disks must thereforeincorporate a physically accurate model of gas and dust and their interaction with thestellar irradiation. Studies which incorporate such a model rarely exist. The basis of thisthesis is the existing code called JUPITER which was developed by Frédéric Masset and
6
-
Judit Szulágyi [Szulágyi et al., 2016]. The JUPITER code is a radiative hydrodynamicalcode which models gas and its interaction with the stellar irradiation in 3 dimensions. Inthis thesis we implement an additional numerical solver in the JUPITER code with whichwe are capable of running 3 dimensional dust and gas simulations of circumstellar disks inorder to study the link between planets and observable disk features.
2 Overview
2.1 Formation Scenarios
The planets in the solar system are very diverse and all have different sizes, colors orcompositions. Today it is common to divide the planets into two groups based on theirproperties. On the one hand there are the terrestrial or rocky planets of the inner solarsystem (Mercury, Venus, Earth and Mars) and on the other hand the gas planets of theouter solar system (Jupiter, Saturn, Uranus, Neptune). The terrestrial planets all have arocky surface. The gas planets do not have a solid surface but are essentially giant spheresof gas held together by their own gravity. Since there are planets with such different mor-phologies in our solar system it is believed that there are different formation mechanismsresponsible for the formation of these planets. In other words, the rocky planets must havegone through a different formation history than the gas planets.If stars are the result of the gravitational collapse of a gas and dust cloud, it possible toimagine a similar formation scenario for the giant gas planets Jupiter and Saturn. If aregion in the circumstellar disk becomes dense enough it can locally collapse under the pullof gravity to form a self gravitating core of disk material which later becomes a planet. Thisscenario is known as the disk instability scenario (e.g. [Boss, 1997]). Another formationscenario thought to be possible is the so called core accretion scenario [Pollack et al., 1996].Here, solid material clumps together to form a core which orbits the star embedded in thegaseous disk. As the core grows due to the accretion of solid material, its gravitationalattraction grows also. The core can become massive enough to attract gas from the sur-rounding disk to form a a giant gas planet with a gaseous envelope and a solid core.
7
-
Figure 2: Image of the surface of the planetJupiter taken by the Juno spacecraft. WithJuno we study the composition of Jupiterand hopefully learn something about the for-mation history. (credit: NASA)
Figure 3: The Very Large Telescope (VLT)in Chile. It is one of the most technically ad-vanced ground based telescopes today. TheMilky Way galaxy is visible on the sky in thebackground. (credit: ESO)
Figure 4: Radio telescopes as part of the Atacama Large Millimeter/submillimeter Array(ALMA) located at 5000 m above sea level in the Atacama desert in Chile. ALMA is anideal instrument to observe circumstellar disks at high spatial resolution. (Image credit:ESO)
2.2 Circumstellar Disks
Circumstellar disks seem to be present around most low mass stars in star formation re-gions, such as for example the Orion Nebula Cluster [Hillenbrand et al., 1998]. These disks
8
-
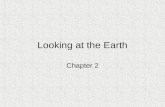
Figure 5: This ALMA observation shows the circumstellar disk around the star HL Tauri.Gaps and rings in the disk are clearly visible which might be caused by planets orbiting inthe disk. However, other explanation are also possible. (credit: ESO)
have a radial extent of 10s to 100s of AU (1 AU≈ 1.5·1011 m) (e.g. [Williams and Cieza, 2011]).The total mass of the disk is usually lower than the mass of the central star and is domi-nated by the mass of cold (
-
disk has disappeared. For a comprehensive overview on circumstellar disk properties andtheir evolution we refer to [Williams and Cieza, 2011].
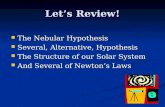
Figure 6: First observation of a planet inside the gap of a circumstellar disk of the star PDS70 [Keppler et al., 2018]. The star is located at a distance of 113 pc from Earth and is anestimated 5.4 Myr old and the circumstellar disk is still present. The projected separationbetween the star and the planet is ∼22 au. Observations like this are very important toconstrain the theory of planet formation, specifically the formation timescale of planets.As of today, only a hand full of planets embedded in their circumstellar disk have beenobserved.
2.3 Dust
Besides the gas, dust particles are an important constituent of circumstellar disks. Dustis made of grains of solid material (sub-µm-sized to cm-sized or larger). The fraction ofdust in circumstellar disks is not only relevant for the formation of planets but also forastronomical observations. Dust dominates the opacity in the disk and astronomical mm-continuum observations (e.g. with ALMA) mainly trace the thermal emission of the dustparticles. The dynamics of dust is different from that of the gas because dust does not feelpressure forces. Solid particles on a circular orbit in a rotationally supported disk move
10
-
with Keplerian velocity ΩK =√GM∗/r3. Gas on the other hand is pressure supported and
therefore rotates with a sub-Keplerian velocity Ω < ΩK . The result is a drag force whichacts between the dust and the gas. Small dust grains (∼ 0.1 µm) are swept along with thegas and mix very well. Therefore, the distribution of the small dust grains is very similar tothe distribution of the gas. The larger dust grains, however, decouple from the gas and theirmotion can be different from the motion of the gas. When the larger grains decouple theyexperience a headwind from colliding with the gas particles. The larger grains thereforetend to vertically settle on the mid-plane of the disk. This results in a segregation of dustgrains. The smaller grains are swept up by the gas to high altitudes above the mid-plane,whereas the larger grains are concentrated towards the mid-plane. Due to their mutualinteraction, the dust loses angular momentum to the gas and slowly drifts inwards towardsthe star [Whipple, 1972]. Overall, the motion of dust in a circumstellar disk is differentfrom that of the gas.
11
-
2.4 The ”ALMA Revolution”
The commissioning of ALMA has for the fist time provided astronomers with an instrumentwhich is capable of high resolution observations in the mm-wavelength range of the con-tinuum spectrum of circumstellar disks. Theses continuum observations mainly trace thedistribution of the mm-sized dust grains in the disk. The observations were revolutionaryin the field and have revealed a multitude of substructures in most observed circumstel-lar disks. Such structures had not been observed before. Among the observed structuresare spiral arms, azimuthal asymmetries, warps, shadows or cavities. However, the mostcommon features observed are concentric rings and gaps in the disk as seen for example inthe observation of the disk around the star HL TAU (see figure 5). So far there has beenno consensus on the origin of these structures. Many theories have emerged with the goalto explain the observed gap and ring structures. To give an overview, these theoreticalapproaches can be divided into two groups. One group aims to explain the features withphysical or chemical processes in the disk, the other group relates the observed structureto the presence of planets. Physical mechanisms which may explain some of the observedfeatures include pebble growth around ice lines (e.g. [Zhang et al., 2015]). An ice lineis the region in the disk where the stellar radiation is low enough for a certain gaseouscomponent to form solids. Other mechanisms which can explain the observed features arenon-ideal magnetohydrodynamical (MHD) effects (e.g. [Béthune et al., 2017]). The expla-nation which involves the presence of planets suggests itself because planets are thoughtbe very common around stars. Therefore, it is widely believed that (some of) the observedstructures are caused by young orbiting planets. In this case, some studies suggest thatthe observed gaps and ring structures might be used to relate observed features to plane-tary properties. For example gap depths or widths can potentially constrain the mass ofa planet orbiting in the disk (e.g. [Zhang et al., 2018]). Having access to the properties ofyoung planets is crucial for a complete understanding of the theory of planet formation.Unfortunately, there has been little success in directly studying young planets with astro-nomical observations. The reason for this is that the techniques which are usually appliedto finding exoplanets are not efficient at finding planets around young stars. Only a fewplanets or planet candidates have been observed in systems which are younger than 10million years i.e. systems which still host a disk (e.g. [Keppler et al., 2018] and see figure6). This means that astronomical observations are not an ideal tool to study the propertiesof young planets directly, at least at the moment. Therefore, a link between observable diskfeatures and planetary properties would have a substantial impact on the understanding ofplanet formation. It would provide observational access to the early phases of planet for-mation. However, in order to understand the impact a planet has on the surrounding disk,a good physical understanding of the interaction between planets and disks is essential.
12
-
Figure 7: An overview of 1.25mm continuum emission observations taken by ALMAas part of the Disk Substructures at High Angular Resolution Project (DSHARP)[Andrews et al., 2018]. The beamsize is shown in the lower left corner. The bar in thelower right corner represents a distance of 10 AU. The disks are rich in substructures andrings or gaps can be seen in almost every disk.
13
-
2.5 Planet-Disk Interaction
Before the ALMA ”revolution”, the interactions between planets and disks have been stud-ied both analytically and numerically without much physical guidance from astronomicalobservations. Numerical simulations have long predicted that a massive enough planetembedded in a disk opens a gap in the gas density at the location of its orbit (see figure8 and e.g. [Lin and Papaloizou, 1984], [Kley, 1999]). The fact that planets open annulargaps in gas disks already suggests that the observed disk features might indeed be inducedby planets. But this is still up for debate. More recent work has focused more on studyingthe features which are directly observable with mm-continuum observations and has triedto link disk structures to planetary properties. Because the lack of direct astronomical ob-servations of planets embedded in a disk, physically accurate hydrodynamical simulationspose an alternative to study the interaction between planets and disks. Since the ALMAcontinuum observations trace the distribution of the mm sized dust grains, it is importantto have a physically accurate treatment of these dust grains in numerical simulations if thegoal is to study the link between planets and observable disk features from mm-continuumobservations. However, physically accurate numerical simulations of circumstellar diskswith both gas and dust components are complicated and require substantial computationalresources. Therefore, only recently, physically accurate global simulations of circumstellardisks have become feasible.
Figure 8: W. Kley studied gaps created by planets in 2D gas disks with numerical simu-lations already in 1999. The image shows the gas surface density of the gas. The verticalaxis represents the radial distance from the star and the horizontal axis is the projection ofthe azimuthal angle. The planet is located at r=1 and φ = 3.14. The gap is clearly visibleas a dark horizontal band around the orbit of the planet. [Kley, 1999]
14
-
2.6 Numerical Modelling of Circumstellar Disks
2.6.1 Overview and Challenges
The reason why a physically accurate numerical model of circumstellar disks is so challeng-ing is the fact that the conditions in disks are very diverse. Densities vary by >10 orders ofmagnitude, temperatures vary by 3 orders of magnitude. This makes the dynamics of gasand dust inside the disk very complex. Moreover, the gravitational potential of the centralstar or nearby stars, self-gravity of the disk, interactions between gas and dust, magneticfields or radiation play an important role. And this is only the physics of the system,completely ignoring the chemistry in the disk. Currently, we do not have the computa-tional resources to perform accurate multi-physics simulations which model all the knownphysical processes in the disk. This will also likely not change in the immediate future.Therefore, numerical models must be simplified or certain physical mechanisms must beneglected in order to use numerical models as a tool to study the properties of circumstellardisks already today. Most numerical simulations today focus on only one or two importantphysical processes. For an overview of the grand challenges in disk modelling we referto [Haworth et al., 2016]. Figure 9 gives a schematic overview over the most importantphysical and chemical processes in a circumstellar disk. The most important processes forthe study of planet-disk interactions are gas and dust dynamics and radiative transfer.
2.6.2 Hydrodynamical Simulations
In computational hydrodynamics there are mainly two numerical approaches to solve forthe time evolution of fluid flows in disks. On the one hand there is the grid based or fluidapproach with is sometimes also called the Eulerian approach. In the Eulerian approach,the computational domain is divided into discrete cells. Each cell is then assigned a hy-drodynamical variable (density, velocity etc.) which are then evolved in time based onhydrodynamical equations. On the other hand there is the Lagrangian approach in whichthe coordinates move along with the fluid. In circumstellar disk simulations the numericalsolvers are either grid based Eulerian solvers or Lagrangian Smoothed Particle Hydrody-namics (SPH) solvers. In SPH the fluid is decomposed into small packets or ”particles”and their dynamical evolution is then solved individually. The advantage of a Lagrangianapproach is that there are no advection terms which have to be solved. This results in asimple numerical treatment of the problem. The SPH approach is best suited for complexgeometries because there is no predefined grid. However, the SPH treatment requires theaddition of artificial viscosity which makes SPH simulations very dissipative. Moreover, theresolution in an SPH simulation is limited by the finite number of particles which can leadto under-resolved simulations especially in low density regions. For an overview on SPHsee e.g. [de Val-Borro et al., 2005] or [Price, 2012]. For grid based solvers, differentiallyrotating disks pose another challenge because numerical diffusion can become significantif the fluid flow is not well aligned with the grid. Therefore, cylindrical or spherical grids
15
-
Figure 9: Schematic illustration of a vertical cut through a circumstellar disk. The labelsindicate some of the physical and chemical processes in the disk. The mechanisms in-cluded are hydrodynamics (HD), magnetohydrodynamics (MHD), radiation hydrodynam-ics (RHD), radiative transfer (RT), chemistry (CHEM), and dust dynamics (DD). Source:[Haworth et al., 2016]
result in the most accurate numerical treatment. Moreover, the development of new numer-ical algorithms (e.g. the FARGO algorithm developed by F. Masset [Masset, 2000]) havecontributed to the efficiency and accuracy of the grid based approach. The grid based ap-proaches can be divided further into upwind solvers [Stone et al., 1992] and Godunov-typesolvers. The latter usually involve Riemann solvers. A widely used family of hydrody-namical codes which apply an upwind method are the FARGO codes, e.g. FARGO3D[Beńıtez-Llambay and Masset, 2016]. However, upwind type solvers perform poorly whenit comes to accurately capturing shock fronts in fluid flows. For this task, Godunov-type
16
-
codes like JUPITER [Szulágyi et al., 2016] perform much better and are less dissipative.
2.6.3 Dust Modelling
If the motion of the dust is decoupled from the motion of the gas it is crucial to separatelymodel the dynamics of the dust and the dynamics of the gas. After high resolution mm-continuum observations have become available, a lot of effort has been put into accuratelymodelling the dynamics of the dust component in circumstellar disks. The separate dusttreatment is especially important because it is believed that the dust particles which aretraced with mm-continuum observation are large enough to be decoupled from the gas incircumstellar disk and follow their own dynamics. With an SPH approach, the dust is mod-elled as an additional population of particles (in addition to the population for the gas) forwhich the dynamical equations are solved separately. Current SPH studies usually includetwo fluids (gas + dust) and are therefore limited to a single dust grain size population persimulation (e.g. [Fouchet et al., 2007]). Nonetheless, global 3D SPH simulations of circum-stellar disk including dust and gas have almost become a standard. On the grid based side,a couple of different approaches have been taken. In a ”hybrid” approach the gas dynamicsis computed on a grid whereas the dust is modelled as a population of Lagrangian particles.When modelled as Lagrangian particles, the back-reaction from dust onto the gas is usu-ally neglected. This ”hybrid” method was recently applied in 2D in the DSHARP project(see [Andrews et al., 2018] and specifically [Zhang et al., 2018]). Both the ”two-fluid” SPHand the ”hybrid” approaches with Lagrangian particles work best for mostly decoupleddust grains (for more information see [Haworth et al., 2016]). On the grid based side,a ”two-fluid” approach has also been implemented (e.g. [Beńıtez-Llambay et al., 2018])and applied to to study circumstellar disks (e.g. [Paardekooper and Mellema, 2006b]). Ina two-fluid grid based approach the dust is usually modelled as a pressure-less fluid forwhich the dynamics is solved separately from the gas. Paardekooper et al. have extendedtheir RODEO code [Paardekooper and Mellema, 2006a] with a dust solver to run two-fluidsimulations of gas and dust [Paardekooper and Mellema, 2006b]. However, they focusedon 2D simulations and 3D simulations with this approach are rare. A fluid based approachprovides a high degree of accuracy within the limits of their validity whereas the particlebased approaches suffer from low resolution especially in low density areas.
2.7 Current State of the Field
Most of the recent advances in the field of planet formation and disk interaction havebeen made using 2D or 3D hydrodynamical simulations. With the advent of high reso-lution mm-continuum observations, studying the dust component has become an impor-tant component of recent numerical studies. Studies have shown that the dust distribu-tion can be significantly different from the distribution of the gas. Annular gaps in dustopen much more rapid compared to gaps in the gas [Maddison et al., 2007]. Moreover,
17
-
lower mass planets are able to open gaps in dust which do not open gaps in the gas (e.g.[Paardekooper and Mellema, 2006b], [Gonzalez et al., 2012]).The ultimate goal in the field of dust modelling in circumstellar disks is a full 3D modelwhich includes the the entire dust grain size population.
18
-
Part I
Theory and Background3 Physical Model
We describe the dynamics of the gas and the dust in the circumstellar disk with a separateset of hydrodynamic equations for each fluid. In this section we will introduce the equationswhich govern the dynamics and how we model the interaction between the two fluids witha drag force.
3.1 Gas
We describe the dynamics of the gas fluid with the set of Euler equations. The Euler equa-tions are one of the standard sets of partial differential equations in hydrodynamics. Thefirst equation of the set comes from the conservation of mass and describes the evolutionof the gas density ρg:
∂ρg∂t
+ ∇ · (ρgvg) = 0 (1)
Here, vg is the gas velocity. The second equation describes the conservation of (linear)momentum
∂(ρgvg)∂t
+ ∇ · (ρgvg ⊗ vg + Pg1) = Fdragg + Sg (2)
where Pg is the pressure of the gas and 1 is the unit tensor. Fdragg models the momentumtransfer between the gas and the dust fluid due to drag. Sg is the source vector of themomentum equation which contains the acceleration terms which influence the momentumevolution of the gas. This includes for instance a term for the gravitational potential. Inthe simplest model we can close this system of two equations with an isothermal equationof state (EoS)
Pg = c2sρg (3)
where cs is the isothermal sound speed of the gas. In the isothermal setting, the soundspeed is directly linked to the temperature of the gas Tg through the Boltzmann constantkB and the mean molecular weight µg
c2s =kBTgµg
(4)
In the isothermal case, the local temperature, or the local sound speed respectively, has apredefined constant value. This is similar to a situation where heating and cooling processesare extremely efficient and happen instantaneously.
19
-
In a more advanced model we include a third dynamical equation. The conservation ofenergy equation:
∂Eg∂t
+ ∇ ·[(Eg + Pg)
]vg = Sg (5)
Here Eg = eg + 12ρgv2g is the total energy of the gas per unit volume and eg is the internal
energy of the gas per unit volume. Sg is the source term for the energy equation. For moredetails on the energy equation we refer to [Szulágyi, 2015]. When including the energyequation we switch from an isothermal equation of state to an ideal gas equation of stateto close the system of three equations:
Pg = (γ − 1)eg (6)
Here, γ is called the adiabatic index which we set to 1.43. In this setting, the heatingand cooling are not instantaneous anymore. Instead, an increase in pressure leads to anincrease in gas temperature. In the adiabatic setting the sound speed is
c2s = γ(γ − 1)egρg. (7)
In this case the sound speed is not a fixed value as in the isothermal case. Instead, it is aquantity which is determined by solving the energy equation (5).
3.2 Dust
In addition to the gas fluid we model dust as a pressure-less fluid which means that thedynamics of this second fluid is governed by the Euler equations in the limit of vanishingpressure (P → 0). This is equivalent to an isothermal description of a gas with vanishingspeed of sound (cs → 0). The mass conservation equation for the dust fluid is equivalentto the gas case:
∂ρd∂t
+ ∇ · (ρdvd) = 0 (8)
The equation for the conservation of (linear) momentum is different from (2) and thepressure term vanishes:
∂(ρdvd)∂t
+ ∇ · (ρdvd ⊗ vd) = Fdragd + Sd (9)
An equation of state is not needed to close the system of (8) and (9). Here, Sd is again thevector of source terms.
3.3 Dust-Gas Interaction
The dust particles and the gas molecules interact via a drag force. We follow the work of[Weidenschilling, 1977] and describe this interaction in the Epstein regime where the size of
20
-
dust grains a is smaller than the mean free path λg of the gas molecules. Generally, this isa good assumption for conditions prevalent in circumstellar disks [Nakagawa et al., 1986].We express the drag force which is experience by the dust fluid per unit volume Fdragd asa function of the relative velocities between the gas and the dust fluid:
Fdragd = −ρdτs
(vg − vd) (10)
where τs is the stopping time of the dust particles. The stopping time is defined as theratio between the momentum of a dust particle and the drag force acting on it:
τs =mdvd
F dragd(11)
In the Epstein regime the stopping time can be expressed as function of the dust soliddensity ρs, the gas density ρg and the mean thermal velocity ū of the gas molecules[Weidenschilling, 1977]:
τs =ρsa
ρgū(12)
The mean thermal velocity can be expressed as ū =√
8πγ cs where γ is the adiabatic index
and cs is the speed of sound in the gas. When describing the degree of coupling between thegas and the dust, a parameter which is widely used is the non dimensional Stokes number.The Stokes number is the ratio between the stopping time τs and the the eddy turn-overtime τed.
St = τsτed
(13)
Following [Birnstiel et al., 2010], in a rotating disk, we set the eddy turn-over time to bethe inverse of the Keplerian angular velocity ΩK of the disk
τed =1
ΩK(14)
With the definition in (12) and (14) and the expression for the thermal velocity ū we canwrite the Stokes number (13) as
St =√πγ
8 ·ΩKρsaρgcs
(15)
With this definition we can use the Stokes number to parametrize the drag force acting onthe dust fluid
Fdragd = −ρdΩKSt
(vd − vg) (16)
and equivalently for the drag force acting on the gas fluid
Fdragg = −ρdΩKSt
(vg − vd) (17)
21
-
4 Computational Fluid Dynamics: The Basics
We solve the fluid equations introduced in the previous section numerically. There aremany numerical approaches to solve these systems of partial differential equations (PDE).For this work we use the JUPITER code which solves the gas equations and have addeda solver to deal with the pressure-less equations of the dust fluid. More specifically theJUPITER is a 3D Godunov type code with mesh refinement capability. It uses a finitevolume approach to solve a Riemann problem at cell interfaces over the entire simulationdomain. Because we resort to some basics concepts of computational fluid dynamics whendescribing the dust solver in the following section, we will give a brief introduction tothese topics in this section. We will also perform some mathematical preparations whichwill serve as the foundation of the following section where we apply the new concepts tothe special case of the pressure-less Euler equations. A lot of what is introduced in thissections is based on the books of Randall J. Leveque [LeVeque, 2010] and Eleuterio F. Toro[Toro, 2009].
4.1 Conservation Laws
The Euler equations with which we describe the dynamics of the gas and the dust fluidsare a special type of PDE’s. They are part of a class of PDE’s called conservations laws.Generally, conservation laws can be written in the following form:
∂q∂t
+∇ · f(q) = 0 (18)
where
q =
q1q2...qm
and f(q) =f1f2...fm
(19)are m-dimensional vectors. Here, q is called the state vector and f(q) is called the fluxvector. Conservation laws are found all over physics and the vectors q and f can take manydifferent forms. It is easy to see that the set of equations with which we describe the gasfluid ((1), (2), (5)) and the dust fluid ((8), (9)) are sets of conservation laws like (18). Thesimplest form of a conservation law (18) is the one dimensional form with m = 1:
∂q(x, t)∂t
+ ∂f(q(x, t))∂x
= 0 (20)
Because conservation laws are very frequent in physics there exists vast literature coveringmany solution strategies to solve a system of conservation laws. In a lot of cases, thesolution strategies for complex multidimensional problems are based on the treatment ofthe one dimensional problem (20). Therefore, we will also first apply our solution strategyto the one dimensional problem before we generalise to the three dimensional case.
22
-
4.2 The Riemann Problem
When using a fluid approach in computational fluid dynamics (in contrast to a particleapproach), the governing fluid equations are usually solved on a discrete grid. In onedimension a grid consists of N equally spaced cells Ci with i = {1, ... , N}. The cellCi has boundaries at x1−1/2 and x1+1/2. When dealing with hydrodynamics on a grid,we may encounter discontinuities of the hydrodynamic quantities at the cell interfaces. Amathematical problem which appears naturally in such a situation is the so called Riemannproblem. The Riemann Problem is an initial value problem which consists of two piece-wiseconstant states which are initially separated by a discontinuity. In one dimension we canconstruct this problem by defining a piece-wise constant function q(x, t = 0) with a leftstate qL, a right state qR and a discontinuity at x = 0 as illustrated in figure 10.
q(x, 0) =
qL if x < 0qR if x > 0 (21)Moreover, we assume that the dynamics of the problem is governed by a conservation lawof the form (18). The solution to the Riemann problem then consists of the function q(x, t)for times t > 0. In simple cases, this solution can be found analytically. We will see laterthat we will find the numerical solution to the Euler equations in three dimensions bysolving a series of one dimensional Riemann problems like (21).
x
q(x, t = 0)
qL
Left State
qR
Right State
x = 0
Figure 10: Schematic illustration of the Riemann problem at the interface x=0. The initialdata consists of two piece-wise constant states, qL on the left-hand side and qR on the righthand side of the discontinuity at x = 0.
4.2.1 Riemann Problem for the Isothermal Euler Equations
There exist no closed-form solution to the Riemann problem for the Euler equations[Toro, 2009]. Not even for the simple isothermal system. Therefore, we will have to
23
-
compute the exact solution numerically. Regardless, we will discuss the solution of theisothermal Euler equations qualitatively here. This will help us to understand the solu-tion of the Riemann problem for the pressure-less case which in turn is the basis of ournumerical method. We will not go into the solution of the adiabatic case since this wouldgo beyond the scope of this thesis and the structure of the solution is very similar to theisothermal case. For more details on the adiabatic solution we refer the interested readerto [Toro, 2009]. In a one dimensional problem and the isothermal case the state vector qand the flux vector f have the form
q =[ρρv
]and f =
[ρv
ρv2 + c2sρ
](22)
The solution of the Riemann problem for the isothermal Euler equations consists of threeconstants states (’left’, ’right’ and ’mixed’). These states are connected by two wavestravelling at speeds λ1 = û− cs and λ2 = û+ cs. The waves originate from the location ofthe original discontinuity at x = 0 (see figure 11 and figure 12).
x
q(x, t > 0)
0
Figure 11: Schematic illustration of the so-lution to the Riemann problem at a giventime t > 0 for the isothermal Euler equa-tions. The two initial states are now con-nected by a mixed state.
x
t
λ1 λ2
left state right state
mixed state
0
Figure 12: Structure of the solution of theisothermal Riemann problem. There are twowaves originating from the original disconti-nuity at x = 0 propagating with constantspeed λ1 and λ2 respectively. While the leftstate and right state remain unperturbed,there is a new mixed state in between thetwo waves.
24
-
4.2.2 Riemann Problem for the Pressure-Less Euler Equations
For the pressure-less Euler equations in one dimension the state vector q and the fluxvector f have the form
q =[ρρv
]and f =
[ρvρv2
](23)
In this case the solution to the Riemann problem is quite different from the solution in thecase with pressure. The solution is found if one takes the limit P → 0 in the isothermalsolution. For an isothermal equation of state P = c2sρ this is equivalent to the limit ofvanishing sound speed cs → 0. In this limit the two waves with speeds λ1 and λ2 coalesceand form one single wave, called a delta wave [LeVeque, 2004]. The delta wave travels withvelocity û which depends on the initial velocities and densities of the Riemann problem
û =√ρLuL +
√ρRuR√
ρL +√ρR
(24)
The expression for the delta wave velocity û is simply derived from considering the con-servation of mass and momentum. We would like to point out that the state vector q isdefined everywhere but at the position of the delta wave where it is singular. The deltawave can travel to the right (û > 0), it can travel to the left (û < 0) or the delta shockcan remain at the location of the original interface (û = 0) all depending on the initialconditions. In figure 13 we show the special case of a delta wave moving to the right whichis the case when uL > uR. When uL < uR the two initial states move away from each otherleaving vacuum in between. We will make use of the structure of this solution to defineour numerical method. For more details on this solution we refer to [LeVeque, 2004].
25
-
x
q(x, t > 0)
0
Figure 13: Schematic illustration of the solu-tion to the Riemann problem of the pressure-less Euler equations in the x-t plane for thecase uL > uR. The singular delta wave ismoving to the right with constant velocityû.
x
t
û
left state right state
0
Figure 14: Structure of the solution of thepressure-less Riemann problem. A singedelta wave originates from the original dis-continuity at x = 0. The wave propagateswith a constant velocity û.
4.3 Finite Volume Discretization and Godunov’s Scheme
After the qualitative description of the solutions to the Riemann problem we now turnto the computational side and describe how the concepts from previous sections can beapplied to find a numerical solution to our system of PDE’s. To do this we apply the finitevolume discretization which is particularly useful when dealing with conservation laws. Weconsider again a one dimensional continuous domain and split it into equally spaced cellsCi with i = {1, ... , N} where Ci = (xi−1/2, xi+1/2). On this domain we consider a genericcontinuous one dimensional state vector q(x, t) and a flux vector f(q(x, t)) which satisfy aone dimensional conservation law:
∂q(x, t)∂t
+ ∂f(q(x, t))∂x
= 0 (25)
As a first step we integrate the conservation law (25) over the domain of a single cell Ci∫Ci
[∂q(x, t)∂t
+ ∂f(q(x, t))∂x
]dx = 0. (26)
and find that the second term in (26) can directly be evaluated at the borders of Ci atxi+1/2 and xi−1/2. Hence we find
∂
∂t
∫Ciq(x, t) dx = f(q(xi−1/2, t))− f(q(xi+1/2, t)) (27)
26
-
where it is important to notice that the flux vector f(q) is evaluated only at the cellboundaries. This is the discretization we are aiming for. Further, we define the cell averageQi of the quantity q(x, t) over cell Ci at time t:
Qi(t) =1
∆x
∫Ci
q(x, t) dx (28)
where ∆x = xi+1/2 − xi−1/2. Then we rewrite (27) and replace the integral with the cellaverage (28) to find:
∂Qi∂t
= 1∆x
[f(q(xi−1/2, t))− f(q(xi+1/2, t))
](29)
This expression tells us that a change in the cell average Qi is given by the total fluxthrough the two interfaces of cell Ci. Next, we also integrate this expression in time over adiscrete time-step ∆t = tn+1 − tn∫ tn+1
tn
∂Qi∂t
dt = 1∆x
∫ tn+1tn
[f(q(xi−1/2, t))− f(q(xi+1/2, t))
]dt (30)
and simplify the left hand side to:
Qn+1i −Qni =
1∆x
∫ tn+1tn
[f(q(xi−1/2, t))− f(q(xi+1/2, t))
]dt. (31)
where Qni = Qi(tn). Expression (31) gives us an explicit update scheme for the cell averageafter a time-step ∆t. Unfortunately, it is generally difficult to evaluate the time integral onthe right hand side. But it was Sergei K. Godunov who had the idea to approximate theflux vector on the right hand side [Godunov, 1959]. Godunov interpreted each cell interfacei− 1/2 as a Riemann problem between the cell averages Qni−1 and Qni with a discontinuityat xi−1/2. If we do that we can approximate the time dependent flux vector f(q) for t > tnwith the time independent solution to the Riemann problem:
Fn+1/2i−1/2 = RP(Q
ni−1, Q
ni ) ≈ f(q(xi−1/2, t)) (32)
where Fn+1/2i−1/2 is called the numerical flux. If we replace the time dependent flux vector fin expression (31) with the time independent numerical flux F we can compute the timeintegral and find a very simple expression for the cell average at time tn+1:
Qn+1i = Qni +
∆t∆x
[Fn+1/2i−1/2 − F
n+1/2i+1/2
](33)
The only task left is to find an expression for the numerical flux Fn+1/2i−1/2 for every cellinterface based on the cell averages to the left and to the right of the interface. This is thetask of so called Riemann solvers.
27
-
4.4 Riemann Solvers
A Riemann solver is a numerical algorithm which takes as an input two states QL andQR and returns an exact or approximate solution to the Riemann problem. There aremany Riemann solvers in the literature. The book by Toro gives a great overview over themost common solvers in computational fluid dynamics [Toro, 2009]. In the JUPITER codethere are four different types of Riemann solvers implemented. There is an exact iterativeRiemann solver and the approximate two-shock or two-rarefaction Riemann solvers whichare used for the gas fluid. In the case of the pressure-less fluid we have implementedan exact Riemann solver based on [LeVeque, 2004]. For more details on the pressure-lessRiemann solver see section XX.
4.5 Operator Splitting and Source Terms
So far in this section we have only considered conservation laws free of source terms.However, we want to solve a system with source terms. In this section we will explain howwe include source terms in our solution strategy. We consider again a conservation law inone dimensions but now we include a source term S which can depend on the state q andon t:
∂q
∂t+ ∂f(q)
∂x= S(q, t) (34)
As the name suggests, in the operator splitting technique we divide equation (34) into twoequations:
∂q
∂t= S(q, t) (35)
∂q
∂t+ ∂f(q)
∂x= 0 (36)
The first equation contains only the source term and the second equation we already knowas the source free conservation law. This way we are able to split the problem of solving(34) into two sub-problems of solving (35) and (36) separately. A complete time-step thenconsists of two sub-steps. First updating the state q by solving (35) with an appropriateintegration scheme. In the second step we use the updated state q to solve (36).
4.6 Fluid Dynamics in a Rotating Frame and Spherical Coordinates
So far we have only considered one dimensional situations. However, in the JUPITER codewe simulate circumstellar disks in two and three dimensions. Therefore, we must gener-alize the concepts from one dimension to multiple dimensions. Also, because we considerdisks it turns out to be advantageous to use spherical coordinates in three dimensions.Unfortunately, the full set of equations in spherical coordinates are rarely found writtenout explicitly in papers or books. However, for the implementation of the Riemann solversand Godunov’s method it is absolutely necessary to know the equations in an explicit from.
28
-
Because we are unable to refer to any source for this we will perform the full derivationof the pressure-less Euler equations in conservation form in spherical coordinates and arotating frame in this section. We mainly follow the steps outlined in the lecture script byProfessor C. P. Dullemond on numerical fluid dynamics (SS 2009) [C.P. Dullemond, 2009]and apply them to the pressure-less equations.
4.6.1 The Pressure-less Euler Equations in Spherical Coordinates
We consider a spherical coordinate system (r, φ, θ) where the radial coordinate r > 0, thepolar coordinate 0 < θ < π and the azimuthal coordinate 0 < φ < 2π. The velocitycomponents (vr, vθ, vφ) are components in r, θ and φ directions respectively.
Mass Conservation We first look at the conservation of mass equation (8) in conser-vation from without source terms and drop the index d for now.
∂ρ
∂t+ ∇ · (ρv) = 0 (37)
We can write equation (37) explicitly in spherical coordinates
∂ρ
∂t+ 1r2
∂
∂r(r2ρvr) +
1r sin θ
∂
∂θ(sin θρvθ) +
1r sin θ
∂
∂φ(ρvφ) = 0 (38)
where we have used the explicit form of the divergence operator in spherical coordinates:
∇ · v = 1r2
∂
∂r(r2vr) +
1r sin θ
∂
∂θ(sin θvθ) +
1r sin θ
∂
∂φ(vφ) (39)
Momentum Conservation In a second step we consider the conservation of momentumequation for a pressure-less fluid (9) without the source terms on the right hand side. Wealso drop the d index for now and find:
∂(ρv)∂t
+ ∇ · (ρv⊗ v) = 0 (40)
In order to write equation (40) in spherical coordinates we must be a bit more carefulbecause it is a vector equation which involves a rank 2 tensor. Still we would like to splitthe equation into three parts, one for each component in radial, meridional and azimuthaldirection. The derivation for this is a bit cumbersome, therefore we simply state the resultshere (for more details see e.g. appendix A of [Stone et al., 1992]).
29
-
Radial Momentum The radial component of the momentum equation in spherical co-ordinates becomes
∂
∂t(ρvr) +
1r2
∂
∂r(r2ρv2r ) +
1r sin θ
∂
∂θ(sin θρvrvθ) +
1r sin θ
∂
∂φ(ρvrvφ) =
ρ
r(v2θ + v2φ) (41)
We would like to point out that geometric source terms appear here on the right handside which we have to deal with separately. We rewrite equation (41) with the help of thedivergence operator in spherical coordinates (39) in a compact form:
∂
∂t(ρvr) + ∇ · (ρvrv) =
ρ
r(v2θ + v2φ) (42)
Meridional Momentum The meridional component of the momentum equation inspherical coordinates becomes
∂
∂t(ρvθ) +
1r2
∂
∂r(r2ρvrvθ) +
1r sin θ
∂
∂θ(sin θρv2θ) +
1r sin θ
∂
∂φ(ρvφvθ)
= −[ρvθvrr
+ tan θρv2φr
] (43)with geometric source terms on the right hand side. We also rewrite this equation withthe help of the the divergence operator in spherical coordinates (39) in a compact from:
∂
∂t(ρvθ) + ∇ · (ρvθv) = −
[ρvθvrr
+ tan θρv2φr
](44)
Azimuthal Momentum The azimuthal component of the momentum equation in spher-ical coordinates becomes
∂
∂t(ρvφ) +
1r2
∂
∂r(r2ρvrvφ) +
1r sin θ
∂
∂θ(sin θρvθvφ) +
1r sin θ
∂
∂φ(ρv2φ)
= −[ρvrvφr
+ tan θρvθvφr
] (45)Again, geometric source terms appear on the right hand side. For now, we refrain fromwriting the azimuthal component in a compact from with the divergence operator becausewhen dealing with a rotating system we must consider additional steps.
4.6.2 Rotating Systems
Circumstellar disks are rotating systems. In such a rotating systems it is advantageousto replace the linear azimuthal momentum ρvφ in (45) with the angular momentum in
30
-
φ-direction (see e.g. [Kley, 1998]). The specific angular momentum h of a fluid element atposition r with respect to the origin is:
h = r × v (46)
where v is the velocity of the fluid element. Hence, the projection of the angular momentumvector l in φ-direction is
lφ = ρh · eφ = ρvφ sin θr (47)
With this in mind we multiply equation (45) by sin θr and find
∂
∂t(ρvφ sin θr) +
1r
∂
∂r(r2ρvr sin θvφ) +
1r
∂
∂θ(sin θrρvθvφ) +
∂
∂φ(ρv2φ)
+ sin θρvrvφ + cos θρvθvφ = 0(48)
We can show that
1r
∂
∂r(r2ρvr sin θvφ) + sin θρvrvφ =
1r2
∂
∂r(r2vrρvφ sin θr) (49)
and1r
∂
∂θ(sin θrρvθvφ) + cos θρvθvφ =
1r sin θ
∂
∂θ(sin θρvθvφ sin θr) (50)
Therefore, we can plug (49) and (50) into (48) and replace ρvφ sin θr with lφ to get
∂
∂t(ρlφ) +
1r2
∂
∂r(r2ρvrlφ) +
1r sin θ
∂
∂θ(sin θρvθlφ) +
1sin θr
∂
∂φ(ρvφlφ) = 0 (51)
Here all the geometric source terms have disappeared. This was the purpose of replacinglinear momentum with angular momentum. We can now write with the divergence operatorin spherical coordinates:
∂
∂t(ρlφ) + ∇ · (ρlφv) = 0 (52)
4.6.3 Co-Rotating Frame
When running simulations of rotating circumstellar disks it is numerically more efficientto change from a static frame of reference to a co-rotating frame which rotates with thedisk. This is also what is done in the JUPITER code. Therefore, we transform the massconservation equations and the three equations of the momentum conservation in radial,meridional and azimuthal direction into a co-rotating frame. When changing from a staticframe to a rotating frame we must transform the the partial time derivative (see e.g.[C.P. Dullemond, 2009]). The partial time derivative transforms as
∂
∂t→ ∂̄
∂t− Ω0
∂
∂φ(53)
31
-
where the bar indicates the derivative in the co-rotating frame and Ω0 is the angular velocityof the rotating frame with respect to the rest frame. We also transform the velocities fromthe rest frame as. The components in r- and θ-direction do not change. However, theφ-velocity in the rest frame vφ transforms to the velocity in the rotating frame v̄φ plus acontribution from the rotating frame.
vr → vr (54)
vθ → vθ (55)vφ → v̄φ + Ω0r sin θ (56)
The mass conservation equation remains invariant under the transformation to the rotatingframe. We can easily show this by plugging the transformed time derivative and velocitiesinto (38)
∂̄ρ
∂t−Ω0
∂ρ
∂φ+ 1r2
∂
∂r(r2ρvr)+
1r sin θ
∂
∂θ(sin θρvθ)+
1r sin θ
∂
∂φ(ρv̄φ)+
1r sin θ
∂
∂φ(ρΩ0r sin θ) = 0
(57)where the second and last term cancel exactly and we find the equation in the co-rotatingframe
∂̄ρ
∂t+ 1r2
∂
∂r(r2ρvr) +
1r sin θ
∂
∂θ(sin θρvθ) +
1r sin θ
∂
∂φ(ρv̄φ) = 0 (58)
We can write this equation in a compact conservation law form∂qρ∂t
+∇ · fρ = Sρ (59)
withqρ = ρ
fρ = (fρr, fρθ, fρφ)T = (ρvr, ρvθ, ρv̄φ)T
and source termSρ = 0
Here we have dropped the bar above the partial time derivative. Still, we must rememberthat we take the time derivative the co-rotating frame.We also transform the time derivative and the velocities in the radial momentum equationand notice that two terms cancel. Hence, we find:
∂̄
∂t(ρvr) +
1r2
∂
∂r(r2ρv2r ) +
1r sin θ
∂
∂θ(sin θρvrvθ) +
1r sin θ
∂
∂φ(ρvrv̄φ) =
ρ
r(v2θ + v2φ) (60)
Here, we have kept the azimuthal velocity on the right hand side in the rest frame. Thisequation can also be written in the compact form
∂qr∂t
+∇ · fr = Sr (61)
32
-
withqr = ρvr
fr = (frr, frθ, frφ)T = (ρv2r , ρvrvθ, ρvrv̄φ)T
and source termSr =
ρ
r(v2θ + v2φ)
We also transform the time derivative and the velocities in the meridional momentumequation. Hence, we find:
∂̄
∂t(ρvθ) +
1r2
∂
∂r(r2ρvrvθ) +
1r sin θ
∂
∂θ(sin θρv2θ) +
1r sin θ
∂
∂φ(ρv̄φvθ)
= −[ρvθvrr
+ tan θρv2φr
] (62)We can also write this equation in a compact conservation law form
∂qθ∂t
+∇ · fθ = Sθ (63)
withqθ = ρvθ
fθ = (fθr, fθθ, fθφ)T = (ρvrvθ, ρv2θ , ρv̄φvθ)T
and
Sθ = −[ρvθvrr
+ tan θρv2φr
]At last we also transform the time derivative and the velocities in the azimuthal momentumequation. We do not transform the angular momentum lφ because this quantity only makessense in the rest frame. Hence, we find:
∂̄
∂t(ρlφ) +
1r2
∂
∂r(r2ρvrlφ) +
1r sin θ
∂
∂θ(sin θρvθlφ) +
1sin θr
∂
∂φ(ρv̄φlφ) = 0 (64)
We can also write this equation in a compact conservation law form
∂qφ∂t
+∇ · fφ = Sφ (65)
withqφ = ρlφ
fφ = (fφr, fφθ, fφφ)T = (ρvrlφ, ρvθlφ, ρv̄φlφ)T
and the source termSφ = 0
33
-
Summary When considering the pressure-less Euler equations and changing to a rotatingframe and spherical coordinates we have found a system of four conservation laws. Inparticular the equations we have found are:
∂qρ∂t
+∇ · fρ = Sρ (66)
∂qr∂t
+∇ · fr = Sr (67)
∂qθ∂t
+∇ · fθ = Sθ (68)
∂qφ∂t
+∇ · fφ = Sφ (69)
We combine all the state variables qi in a state vector q:
q =
qρqrqθqφ
=
ρρvrρvθ
ρ(v̄φ sin θr + Ω0 sin2 θr2)
(70)
We also combine all the flux vectors fi in a flux matrix f :
f =
fρr fρθ fρφfrr frθ frφfθr fθθ fθφfφr fφθ fφφ
=ρvr ρvθ ρv̄φρv2r ρvrvθ ρvrv̄φρvrvθ ρv
2θ ρv̄φvθ
ρvrlφ ρvθlφ ρv̄φlφ
(71)
Similarly, we combine all the geometric source terms Si in a geometric source vector S:
S =
SρSrSθSφ
=
0ρr (v
2θ + v2φ)
−[ρvθvrr + tan θ
ρv2φr
]0
(72)
It will be the components of the state vector q and the flux matrix f from which theRiemann solvers will construct the numerical solution to the pressure-less Euler equations.
34
-
4.7 Godunov’s Method in 3D Spherical Coordinates
(CITATION NEEDED) In the previous section we have written the pressure-less Eulerequations in spherical coordinates in a co-rotating frame in an explicit form. In this sectionwe discretize the equations over a single cell in order to apply a Riemann solver. This isanalogous to the to the finite volume approach in one dimension in section 4.3. If we ignorethe source terms, the four equations which we have derived in the previous section are allof the following form:
∂q
∂t+∇ · f = 0 (73)
Similarly to the one dimensional case we will integrate equation (73) over the volume ofone three dimensional cell. But first we need some mathematical preparation. In threedimensions and spherical coordinates we can describe a cell with three integer indices(i, j, k) or Ci,j,k. The cell extent in radial direction is ri−1/2 ≤ r < ri+1/2, in meridionaldirection θj−1/2 ≤ θ < θj+1/2 and in azimuthal direction φk−1/2 ≤ φ < φk+1/2. The cellCi,j,k then has the volume Vi,j,k which can be computed as:
Vi,j,k =13(r
3i+1/2 − r
3i−1/2)(cos θj−1/2 − cos θj+1/2)(φk+1/2 − φk−1/2). (74)
The surface area of the cell surface at i+ 1/2 (in r-direction) is:
Si+1/2,j,k = r2i+1/2(cos θj−1/2 − cos θj+1/2)(φk+1/2 − φk−1/2) (75)
and equivalent for i− 1/2. The surface area at j + 1/2 (in θ-direction) is:
Si,j+1/2,k =12(r
2i+1/2 − r
2i−1/2) sin θj+1/2(φk+1/2 − φk−1/2) (76)
and equivalent for j − 1/2. The surface area at k + 1/2 (in φ-direction) is:
Si,j,k+1/2 =12(r
2i+1/2 − r
2i−1/2)(θj+1/2 − θj−1/2) (77)
and equivalent for k − 1/2. That is all we need to start. We first integrate the scalarconservation law (73) over the entire volume of cell Ci,j,k:∫
Ci,j,k
(∂q∂t
+∇ · f)dV = 0 (78)
and apply Gauss’s theorem to rewrite the volume integral of the divergence of f as a surfaceintegral over the entire surface of Ci,j,k:∫
Ci,j,k
∂q
∂tdV +
∫∂Ci,j,k
f · dS = 0. (79)
35
-
The first term in (79) is simply the time derivative of the cell average Qi,j,k times the cellvolume Vi,j,k. The second term in (79) is an integral over the cell boundaries. The cell isbound by six planar interfaces. We must be careful when evaluating this integral becausein the spherical coordinate system opposite cell interfaces are not necessarily parallel nordo they have the same surface area. Thus, we split the second term into six terms, eachcorresponding to the interface flux through one of the six interfaces.
∂Qi,j,kVi,j,k∂t
= fi−1/2,j,kSi−1/2,j,k − fi+1/2,j,kSi+1/2,j,k+ gi,j−1/2,kSi,j−1/2,k − gi,j+1/2,kSi,j+1/2,k+ hi,j,k−1/2Si,j,k−1/2 − hi,j,k+1/2Si,j,k+1/2
(80)
where fi−1/2,j,k is the total interface flux through the interface at ri−1/2 with surface areaSi−1/2,j,k and gi,j−1/2,k is the total interface flux at θj−1/2 with surface area Si,j−1/2,kand hi,j,k−1/2 is the total interface flux through the interface at φk−1/2 with surface areaSi,j,k−1/2. We now have discretized the flux vector in space. With another integration overa time-step ∆t and replacing the flux terms with the numerical fluxes we find:
Qn+1i,j,k = Qni,j,k +
∆tVi,j,k
[Fn+1/2i−1/2,j,kSi−1/2,j,k − F
n+1/2i+1/2,j,kSi+1/2,j,k
]
+ ∆tVi,j,k
[Gn+1/2i,j−1/2,kSi,j−1/2,k −G
n+1/2i,j+1/2,kSi,j+1/2,k
]
+ ∆tVi,j,k
[Hn+1/2i,j,k−1/2Si,j,k−1/2 −H
n+1/2i,j,k+1/2Si,j,k+1/2
] (81)
This discrete form of the conservation law (73) will be used to update the cell averagesQi,j,k. The only thing left to do is to determine the numerical interface fluxes F , G and Hwhich are the solutions to the Riemann problems at the individual cell interfaces.
36
-
5 The JUPITER Code
37
-
Part II
Development of the Dust Solver6 Numerical Methods
6.1 Splitting Source and Transport Steps
In our solution strategy for the dust dynamics we divide a full numerical update of thecell values into two steps. The transport step and the source step (see section 4.5). In thetransport step we set all the source terms to zero as indicated in equation (36) and solve aconservation law free of additional terms. In the source step we perform an update basedon the source terms alone as indicated in equation (35).
6.2 Transport Step in 1 Dimension
We first present the transport step in 1 dimension before we generalize to 3 dimensions. In1 Dimension a source free conservation law can also be written as
∂q∂t
+ ∂f∂x
= 0 (82)
In the case of the pressure-less Euler equations the state vector q and the flux vectors fhave the following form:
q =[ρρv
], f =
[ρvρv2
]To solve this equation numerically we apply Godunov’s method as introduced in section4.3 and find a discrete update formula for (82):
Qn+1i = Qni +
∆t∆x
[Fn+1/2i−1/2 − F
n+1/2i+1/2
](83)
The updated cell average Qn+1i depends on the old cell average Qni and also depends on thenumerical fluxes F. We find the numerical fluxes using Riemann solvers. We will introducethe algorithm for finding the numerical fluxes in section 6.4.
6.3 Transport Step in 3 Dimensions/Spherical coordinates/Rotating Frame
In 3 Dimensions the procedure is a bit more involved but it can basically be traced backto the one dimensional case. We also solve the bare conservation law in the form of (18).
38
-
However, this time the state vector Q has four components as derived in section 4.6.3.
q3D =
ρρvrρvθ
ρ(v̄φ sin θr + Ω0 sin2 θr2)
(84)and the corresponding flux vector f is actually a two dimensional flux matrix of the form:
f3D =
ρvr ρv2r ρvθvr ρlφvrρvθ ρvrvθ ρv2θ ρlφvθρwφ ρvrwφ ρvθv̄φ ρl
2φ
(85)with lφ = v̄φ sin θr+ Ω0 sin2 θr2 Notice that the rows of the tensor f3D are the flux vectorsin r−, θ− and φ−direction respectively. Here we also apply Godunov’s method as outlinedin section 4.7 to arrive at an update scheme for the cell average Qn+1i .
6.4 Pressure-Less Riemann Solver
As pointed out earlier, the only problem left to solve in the update scheme is to find anexpression for the numerical fluxes Fi−1/2 which come from the solutions to the Riemannproblems at each cell interface. We have seen in section 4.2.2 that the analytic solutionto the Riemann problem for the pressure-less Euler equations is well known. Therefore,we can use the analytic solution to design a numerical Riemann solver for pressure-lessequations as proposed by [LeVeque, 2004] for the one dimensional case. We also considerthe 1 dimensional problem first before we generalize to higher dimensions and a sphericalcoordinate system. For every cell interface i we consider the Riemann problem with leftstate Qi−1 and right state Qi with the corresponding fluxes f(Qi−1) and f(Qi) respectively.When the two states move away from each other, i.e. vi−1 < 0 < vi, the solution to theRiemann problem leads to a vacuum state at the cell interface. In this case we set theinterface flux to zero Fi−1/2 = 0. In all the other cases we compute the velocity of thedelta wave û
ûi−1/2 =√ρi−1ui−1 +
√ρi+1ui+1√
ρi−1 +√ρi+1
(86)
and then set the numerical interface flux to
Fi−1/2 =
f(Qi−1) if ûi−1/2 > 012(f(Qi−1) + f(Qi)) if ûi−1/2 = 0f(Qi) if ûi−1/2 < 0
(87)
depending on the sign of the velocity of the delta wave. If the delta wave is moving to theright (ûi−1/2 > 0), we set the numerical interface flux Fi−1/2 equal to the flux of the cell
39
-
to the left of the interface. If the delta wave is moving to the left (ûi−1/2 < 0), we set thenumerical interface flux Fi−1/2 equal to the flux of the cell to the right of the interface.If the delta wave velocity is zero, we set the numerical interface flux to be the averagebetween the the fluxes on the left and on the right. With this definition we arrive at a firstorder accurate update scheme for the state Qn+1i in cell i at time-step n+ 1:
Qn+1i = Qni −
∆t∆x(Fi+1/2 − Fi−1/2) (88)
For testing purposes we applied this method to a one dimensional test problem in which
Figure 15: Numerical solution with the first order Riemann solver based on (87). Wecollided two finite dust clouds. The left cloud initially has a length of ∆x1 = 1.5, aconstant density of ρ1 = 1.0 and a positive velocity of v1 = 1.0. The right cloud initiallyhas a length of ∆x2 = 1.5, a constant density of ρ1 = 0.5 and a negative velocity ofv2 = −0.2. The left panel shows the solution at t = 0.2, the right panel shows the solutionat t = 1.0. A delta wave emerges when the two dust clouds meet at t ≈ 0.42
we let two finite dust clouds collide in order to compare it to the analytic solution (theanalytic solution is presented in e.g. [LeVeque, 2004]). From the analytic solution of theproblem, we know that a delta wave arises from the point where the two dust clouds meet.In figure 15 we show the numerical solution at t = 0.2 and t = 1.0 in black. The greyline represents the analytic solution. We find that the simulation recreates the analyticsolution very well. However, after a few time steps the steep edges of the solution becomeflatter and the numerical solution struggles to recreate the sharp edges of the analyticalsolution. In order to reduce this diffusive behavior we add higher order correction termsto the numerical interface flux. For this we continue to follow [LeVeque, 2004] and apply
40
-
the f-wave approach to define a correction flux:
F̄i−1/2 =12
2∑p=1
sgn(spi−1/2)(
1− ∆t∆x
∣∣∣spi−1/2∣∣∣)
Zpi−1/2 (89)
Here, the quantities Zpi−1/2 are called waves and spi−1/2 are the corresponding speeds. We
set them according to the following criteria:If vi−1 < 0 < vi+1 we set Z1i−1/2 = −f(Q
ni−1), s1i−1/2 = vi−1
Z2i−1/2 = f(Qni ), s2i−1/2 = vi
For all other cases we compute the velocity of the delta wave ûi−1/2 with the definition(86) and define the waves Zpi−1/2 as following:
if ûi−1/2 < 0 : Z1i−1/2 = f(Qni )− f(Qni−1), s1i−1/2 = ûi−1/2
Z2i−1/2 = 0, s2i−1/2 = ûi−1/2
if ûi−1/2 ≥ 0 : Z1i−1/2 = 0, s1i−1/2 = ûi−1/2
Z2i−1/2 = f(Qni )− f(Qni−1), s2i−1/2 = ûi−1/2
The correction fluxes F̄i−1/2 as defined above can then be included in the finite volumeupdate scheme for the state average Qn+1i . The update scheme then takes the followingform:
Qn+1i = Qni −
∆t∆x
(Fi+1/2 − Fi−1/2
)− ∆t∆x
(F̄i+1/2 − F̄i−1/2
)(90)
The correction fluxes F̄i−1/2 are needed to achieve second order accuracy on smooth solu-tions. However, the corrections terms in the update scheme (90) cause spurious oscillationsaround discontinuities in the numerical solution. This can clearly be seen in the test prob-lem of two colliding finite dust clouds which we repeated for this case. As shown in figure(16), the correction terms create unwanted oscillations at the discontinuous edges of thedust clouds. The oscillations grow larger with time and are very prominent in the presenceof the delta wave. In order to avoid these spurious oscillations we limit the fluxes arounddiscontinuities with limiters. To do this we replace the waves Zpi−1/2 with a limited versionZ̃pi−1/2 which we obtain by comparing it to the p-th wave arising from the Riemann problemfrom the left side Zpi−3/2 and the right side Z
pi+1/2. With the help of the minmod-limiter
we measure the smoothness of the solution and limit the flux around discontinuities. Moredetails about this procedure can be found in [LeVeque, 1997]. The new modified correctionflux then looks like
F̃i−1/2 =12
2∑p=1
sgn(spi−1/2)(
1− ∆t∆x
∣∣∣spi−1/2∣∣∣)
Z̃pi−1/2 (91)
41
-
Figure 16: Numerical solution to a one dimensional test problem with the numerical methodbased on Godunov’s method with an added correction flux (89). We collide two finitedust clouds. The initial setup is identical to the setup described in the caption of figure15. The left panel shows the solution at t = 0.2, the right panel shows the solution att = 1.0. Oscillations appear around the sharp edges of the solution already at t = 0.2.The oscillations grow very large when the two clouds meet and a delta wave is expected toform.
with a limited wave Z̃pi−1/2. With the new correction flux we can then arrive at the higherorder limited update scheme:
Qn+1i = Qni −
∆t∆x
(Fi+1/2 − Fi−1/2
)− ∆t∆x
(F̃i+1/2 − F̃i−1/2
)(92)
The numerical solution to our test problem with scheme (92) follows the analytic solutionmuch closer than the first order solution (see figure 17). The edges of the dust clouds aresteeper than in the first order solution and there is no sign of any spurious oscillations.
6.5 Source Step - Fluid Coupling
In the numerical source step, one of the interactions which we consider is the dust-gasinteraction. We model this interaction between the two fluids with a drag force (10) whichwe add to the source terms of the dynamical equations of the gas and the dust. We solvethe interaction due to this drag force in a source step separate from the transport step.The set of equations which we have to solve for this are (93) and (94):
∂vd∂t
= Fdragd
ρd. (93)
∂vg∂t
=Fdraggρg
. (94)
42
-
Figure 17: Numerical solution to a one dimensional test problem with the numerical methodbased on Godunov’s method and a limited correction flux (91) to achieve higher orderaccuracy. We collide two finite dust clouds. The initial setup is identical to the setupdescribed in the caption of figure 15. The left panel shows the solution at t = 0.2, theright panel shows the solution at t = 1.0. The numerical solution (black) traces theanalytical solution (grey) very well. The edges of the clouds are very sharp, the delta waveis represented correctly and there are no oscillations around edges.
Here, vi is the velocity of the fluid, Fdragi is the drag force per unit volume acting on thefluid with density ρi. In (16) and (17) we have derived the expression for the drag forceacting on the dust fluid Fdragd and the gas fluid Fdragg respectively:
Fdragd = −Fdragg = −ρd
ΩKSt
(vd − vg)
Hence, we find that the time derivative of the velocity depends on the Keplerian velocityΩK , the Stokes number St and the velocity difference between the two fluids:
∂vd∂t
= −ΩKSt
(vd − vg) (95)
∂vg∂t
= −ρdρg
ΩKSt
(vg − vd) (96)
We define a coupling parameter CC := ΩK
ρgSt(97)
to arrive at a symmetric system of equations if we plug this definition into equation (95)and (96):
∂vd∂t
= −Cρg(vd − vg) (98)
43
-
∂vg∂t
= −Cρd(vg − vd) (99)
In order to solve (98) and (99) numerically an implicit scheme was implemented in theJUPITER code by Frédéric Masset. An implicit scheme is numerically favorable herebecause when the Stokes number is small (i.e. strong coupling and/or small dust grains)the source terms in (98) and (99) become very large. Large source terms can developsteep gradients and an explicit method would require a very small time-step under theseconditions. Therefore an implicit method is better suited. The implicit scheme which weapply is obtained most conveniently if we rewrite the two equations (95) and (96) in finitedifferences over a times-step ∆t
vn+1d − vnd∆t = −Cρg(v
n+1d − v
n+1g ) (100)
vn+1g − vng∆t = −Cρd(v
n+1d − v
n+1g ) (101)
and solve this system of two equations for vn+1d and vn+1g . We then arrive at an updateformula for the velocities at time t+ ∆t:
vn+1d =vnd + C∆t(ρdvnd + ρgvng )
1 + C∆t(ρd + ρg)(102)
vn+1g =vng + C∆t(ρdvnd + ρgvng )
1 + C∆t(ρd + ρg)(103)
Note that, due to the operator splitting technique, in this source step the densities ρd andρg are both held constant during the update. With this we arrive at the the same implicitupdate formula as [Stone, 1997] or [Beńıtez-Llambay et al., 2018]. The degree of couplingis the governed by the coupling parameter C which is defined in (97). For a given Stokesnumber we compute the coupling parameter with (97). For a given dust particle size a anddust solid density ρs we can use (15) and plug it into (97) to find the coupling parameterC as a function of the dust grain size a:
C =√
8πγ
csρsa
(104)
44
-
7 Coding and Testing
We have performed tests of the fluid coupling in a one dimensional setting as proposed by[Paardekooper and Mellema, 2004].
Figure 18: Isothermal multifluid coupling with C=0, C=1.0 and C=10.0. The resultsclearly show the effect the gas has on the dust and also the effect of the dust on the gas.
45
-
7.1 2D Isothermal
7.2 3D Isothermal
7.3 3D Radiative
7.4 Radial Drift
7.5 Boundary Conditions
8 2D vs. 3D
9 Isothermal vs. Radiative
Part III
Simulations and Results10 Simulations
10.1 Initial and Boundary Conditions
10.1.1 Radial Drift and Disk Lifetime
We are interested in the timescale in which all the dust is lost from the disk. For this welook at a simple model disk whose physical parameters take the form of power laws. Thevolume density of the gas in the mid-plane takes the form
ρg(r) = ρ0,grpAU (105)
and the isothermal speed of sound is
c2s(r) = c20rqAU (106)
where the index 0 indicates the value at r = 1 AU. The scale height of the disk h(r) isgiven by
h(r) = csΩK(107)
with ΩK =√GM∗/r3 the Keplerian angular velocity of the disk. Thus, the scale height
can also be written in power law form
h(r) = h0r(q+3)/2AU (108)
46
-
We now consider dust particles of size a = 1 mm with a solid density ρs = 3 g/mm3 whichorbit with Keplerian velocity in the disk. These dust particles drift radially due to thedrag. In the mid-plane the dust particles drift with a radial velocity vr,d of
vr,d =
√π3
2h0a
AU2ρsρ0,g
(p+ q)r−p+q/2−1AU AU yr−1 (109)
as shown by [Takeuchi and Lin, 2002]. We choose to give our simple disk a constant (p =0.0) density ρ0 = 7.2 × 10−12 g/cm3, a scale height h0 = 0.05AU and q = −0.5. A dustparticle in this representative disk located at 10 AU from the central star drifts with aradial velocity vr,d ≈ 1.5× 10−5 AU yr−1.
11 Discussion
11.1 Limitation of the pressureless fluid approach
[Hersant, 2009] studied the validity of a pressureless fluid approach
47
-
References
[Andrews et al., 2018] Andrews, S. M., Huang, J., Pérez, L. M., Isella, A., Dullemond,C. P., Kurtovic, N. T., Guzmán, V. V., Carpenter, J. M., Wilner, D. J., Zhang, S.,Zhu, Z., Birnstiel, T., Bai, X.-N., Benisty, M., Hughes, A. M., Öberg, K. I., and Ricci,L. (2018). The Disk Substructures at High Angular Resolution Project (DSHARP). I.Motivation, Sample, Calibration, and Overview. The Astrophysical Journal, 869(2):L41.
[Beńıtez-Llambay et al., 2018] Beńıtez-Llambay, P., Krapp, L., and Pessah, M. E. (2018).Asymptotically stable numerical scheme for multispecies momentum transfer: Gas andMultifluid-dust test suite and implementation in FARGO3D. (2002).
[Beńıtez-Llambay and Masset, 2016] Beńıtez-Llambay, P. and Masset, F. (2016).FARGO3D: A new GPU-oriented MHD code.
[Béthune et al., 2017] Béthune, W., Lesur, G., and Ferreira, J. (2017). Global simulationsof protoplanetary disks with net magnetic flux: I. Non-ideal MHD case. Astronomy andAstrophysics, 600:75.
[Birnstiel et al., 2010] Birnstiel, T., Dullemond, C. P., and Brauer, F. (2010). Gas-anddust evolution in protoplanetary disks. Astronomy and Astrophysics, 513(12).
[Boss, 1997] Boss, A. P. (1997). Giant planet formation by gravitational instability. Sci-ence, 276(5320):1836–1839.
[C.P. Dullemond, 2009] C.P. Dullemond, H. W. (2009). Numerical Fluid Mechanics, Co-ordinate systems and gridding techniques (lecture notes).
[de Val-Borro et al., 2005] de Val-Borro, M., Edgar, R. G., Artymowicz, P., Ciecielag, P.,Cresswell, P., Delgado-Donate, E. J., Dirksen, G., Fromang, S., Gawryszczak, A., Klahr,H., Kley, W., Lyra, W., Masset, F., Mellema, G., Nelson, R. P., Paardekooper, S.-j.,Peplinski, A., Pierens, A., Plewa, T., Rice, K., Schäfer, C., and Speith, R. (2005). Acomparative study of disc-planet interaction. Technical report.
[Fouchet et al., 2007] Fouchet, L., Maddison, S., Gonzalez, J.-F., Murray, J., Fouchet, L.,Maddison, S. T., Gonzalez, J.-f., and Murray, J. R. (2007). The effect of a planet onthe dust distribution in a 3D protoplanetary disk The effect of a planet on the dustdistribution in a 3D protoplanetary disk. Technical report.
[Godunov, 1959] Godunov, S. K. (1959). A difference scheme for numerical solution ofdiscontinuous solution of hydrodynamic equations. Math. Sbornik, (47):271–306.
[Gonzalez et al., 2012] Gonzalez, J.-F., Pinte, C., Maddison, S. T., Ménard, F., andFouchet, L. (2012). Planet gaps in the dust layer of 3D protoplanetary disks. Astronomy& Astrophysics, 547:A58.
48
-
[Haworth et al., 2016] Haworth, T. J., Ilee, J. D., Forgan, D. H., Facchini, S., Price, D. J.,Boneberg, D. M., Booth, R. A., Clarke, C. J., Gonzalez, J.-F., Hutchison, M. A., Kamp,I., Laibe, G., Lyra, W., Meru, F., Mohanty, S., Pani´c, O. P., Rice, K., Suzuki, T.,Teague, R., Walsh, C., and Woitke, P. (2016). Grand Challenges in Protoplanetary DiscModelling. Publications of the Astronomical Society of Australia (PASA), 33:22.
[Hersant, 2009] Hersant, F. (2009). On the pressure of collisionless particle fluids. Astron-omy & Astrophysics, 502(1):385–389.
[Hillenbrand et al., 1998] Hillenbrand, L. A., Strom, S. E., Calvet, N., Merrill, K. M.,Gatley, I., Makidon, R. B., Meyer, M. R., and Skrutskie, M. F. (1998). CircumstellarDisks in the Orion Nebula Cluster. The Astronomical Journal, 116(4):1816–1841.
[Keppler et al., 2018] Keppler, M., Benisty, M., Müller, A., Henning, T., Van Boekel, R.,Cantalloube, F., Ginski, C., Van Holstein, R. G., Maire, A. L., Pohl, A., Samland, M.,Avenhaus, H., Baudino, J. L., Boccaletti, A., De Boer, J., Bonnefoy, M., Chauvin, G.,Desidera, S., Langlois, M., Lazzoni, C., Marleau, G. D., Mordasini, C., Pawellek, N.,Stolker, T., Vigan, A., Zurlo, A., Birnstiel, T., Brandner, W., Feldt, M., Flock, M.,Girard, J., Gratton, R., Hagelberg, J., Isella, A., Janson, M., Juhasz, A., Kemmer, J.,Kral, Q., Lagrange, A. M., Launhardt, R., Matter, A., Ménard, F., Milli, J., Mollière,P., Olofsson, J., Pérez, L., Pinilla, P., Pinte, C., Quanz, S. P., Schmidt, T., Udry, S.,Wahhaj, Z., Williams, J. P., Buenzli, E., Cudel, M., Dominik, C., Galicher, R., Kasper,M., Lannier, J., Mesa, D., Mouillet, D., Peretti, S., Perrot, C., Salter, G., Sissa, E.,Wildi, F., Abe, L., Antichi, J., Augereau, J. C., Baruffolo, A., Baudoz, P., Bazzon, A.,Beuzit, J. L., Blanchard, P., Brems, S. S., Buey, T., De Caprio, V., Carbillet, M., Carle,M., Cascone, E., Cheetham, A., Claudi, R., Costille, A., Delboulbé, A., Dohlen, K.,Fantinel, D., Feautrier, P., Fusco, T., Giro, E., Gluck, L., Gry, C., Hubin, N., Hugot, E.,Jaquet, M., Le Mignant, D., Llored, M., Madec, F., Magnard, Y., Martinez, P., Maurel,D., Meyer, M., Möller-Nilsson, O., Moulin, T., Mugnier, L., Origné, A., Pavlov, A.,Perret, D., Petit, C., Pragt, J., Puget, P., Rabou, P., Ramos, J., Rigal, F., Rochat, S.,Roelfsema, R., Rousset, G., Roux, A., Salasnich, B., Sauvage, J. F., Sevin, A., Soenke,C., Stadler, E., Suarez, M., Turatto, M., and Weber, L. (2018). Discovery of a planetary-mass companion within the gap of the transition disk around PDS 70. Astronomy andAstrophysics, 617.
[Kley, 1998] Kley, W. (1998). On the treatment of the Coriolis force in computationalastrophysics. Astronomy & Astrophysics.
[Kley, 1999] Kley, W. (1999). Mass flow and accretion through gaps in accretion discs.Monthly Notices of the Royal Astronomical Society, 303(4):696–710.
[LeVeque, 1997] LeVeque, R. J. (1997). Wave Propagation Algorithms for MultidimensionalHyperbolic Systems. Journal of Computational Physics, 131(2):327–353.
49
-
[LeVeque, 2004] LeVeque, R. J. (2004). the Dynamics of Pressureless Dust Clouds andDelta Waves. Journal of Hyperbolic Differential Equations, 01(02):315–327.
[LeVeque, 2010] LeVeque, R. J. (2010). Finite Volume Methods for Hyperbolic Problems.
[Lin and Papaloizou, 1984] Lin, D. N. C. and Papaloizou, J. C. B. (1984). On the tidalinteraction between protoplanets and the primordial solar nebula. I - Linear calculationof the role of angular momentum exchange. The Astrophysical Journal, 285:818–834.
[Maddison et al., 2007] Maddison, S. T., Fouchet, L., Gonzalez C Springer-Verlag, J.-F.,Fouchet, L., and Gonzalez, J.-F. (2007). Gap Formation in the Dust Layer of 3D Proto-planetary Disks. Astrophysics and Space Science, 311.
[Mamajek et al., 2004] Mamajek, E. E., Meyer, M. R., Hinz, P. M., Hoffmann, W. F., Co-hen, M., and Hora, J. L. (2004). Constraining the Lifetime of Circumstellar Disks in theTerrestrial Planet Zone: A Mid-Infrared Survey of the 30 Myr old Tucana-HorologiumAssociation. The Astrophysical Journal, 612(1):496–510.
[Masset, 2000] Masset, F. (2000). FARGO : a fast eulerian transport algorithm for differ-entially rotating disks. Technical Report 141.
[Mayor and Queloz, 1995] Mayor, M. and Queloz, D. (1995). A Jupiter-mass companionto a solar-type star. Nature, 378(6555):355–359.
[Nakagawa et al., 1986] Nakagawa, Y., Sekiya, M., and Hayashi, C. (1986). Settling andgrowth of dust particles in a laminar phase of a low-mass solar nebula. Icarus, 67(3):375–390.
[Paardekooper and Mellema, 2006a] Paardekooper, S. and Mellema, G. (2006a). Astro-physics RODEO : a new method for planet-disk interaction. Astronomy & Astrophysics,1220:1203–1220.
[Paardekooper and Mellema, 2004] Paardekooper, S.-J. and Mellema, G. (2004). Planetsopening dust gaps in gas disks. Technical report.
[Paardekooper and Mellema, 2006b] Paardekooper, S.-J. and Mellema, G. (2006b). Dustflow in gas disks in the presence of embedded planets. Astronomy & Astrophysics,453(3):1129–1140.
[Pollack et al., 1996] Pollack, J. B., Hubickyj, O., Bodenheimer, P., Lissauer, J. J.,Podolak, M., and Greenzweig, Y. (1996). Formation of the giant planets by concur-rent accretion of solids and gas. Icarus, 124(1):62–85.
[Price, 2012] Price, D. J. (2012). Smoothed particle hydrodynamics and magnetohydrody-namics. Journal of Computational Physics, 231(3):759–794.
50
-
[Stone, 1997] Stone, J. M. (1997). The Wardle Instability in Interstellar Shocks. I. Non-linear Dynamical Evolution. The Astrophysical Journal, 487(1):271–282.
[Stone et al., 1992] Stone, J. M., Mihalas, D., and Norman, M. L. (1992). ZEUS-2D: Aradiation magnetohydrodynamics code for astrophysical flows in two space dimensions.III - The radiation hydrodynamic algorithms and tests. The Astrophysical Journal Sup-plement Series, 80:819.
[Szulágyi, 2015] Szulágyi, J. (2015). Gas Accretion onto Giant Planets. PhD thesis, Uni-versité Nice Sophia Antipolis.
[Szulágyi et al., 2016] Szulágyi, J., Masset, F., Lega, E., Crida, A., Morbidelli, A., andGuillot, T. (2016). Circumplaneta