Pioneers in Engineering, UC Berkeley Pioneers in Engineering Week 8: Sensors and Feedback.
18
Pioneers in Engineering, UC Berkeley Pioneers in Engineering Week 8: Sensors and Feedback
-
Upload
britton-frederick-thomas -
Category
Documents
-
view
222 -
download
3
Transcript of Pioneers in Engineering, UC Berkeley Pioneers in Engineering Week 8: Sensors and Feedback.
Pioneers in Engineering, UC Berkeley
Pioneers in EngineeringWeek 8: Sensors and Feedback

Pioneers in Engineering, UC Berkeley Control
Announcements
2
Pioneers in Engineering, UC Berkeley 3Control
Lesson Agenda
Definition of systems Overview of controls PID control
Pioneers in Engineering, UC Berkeley 4Control
Lesson Agenda
Definition of systems Overview of controls PID Control

Pioneers in Engineering, UC Berkeley 5Control
Systems
INPUT OUTPUT
A system is a function.
SYSTEM

Pioneers in Engineering, UC Berkeley 7Control
F1 Car
Example of Systems
INPUT? OUTPUT?

Pioneers in Engineering, UC Berkeley 8Control
Lesson Agenda
Definition of systems Overview of controls PID Control
Pioneers in Engineering, UC Berkeley 9Control
What is controls theory?
The study of how to choose the input to a system to give the desired output.
The entity which generates the input is called a controller Vex

Pioneers in Engineering, UC Berkeley 10Control
Why is controls hard? Usually we don’t know what the system
is exactly Model Mismatch–Model not the same as real
system
Disturbances–gravity, wind, etc. Laboratory
ModelReality
Pioneers in Engineering, UC Berkeley 11Control
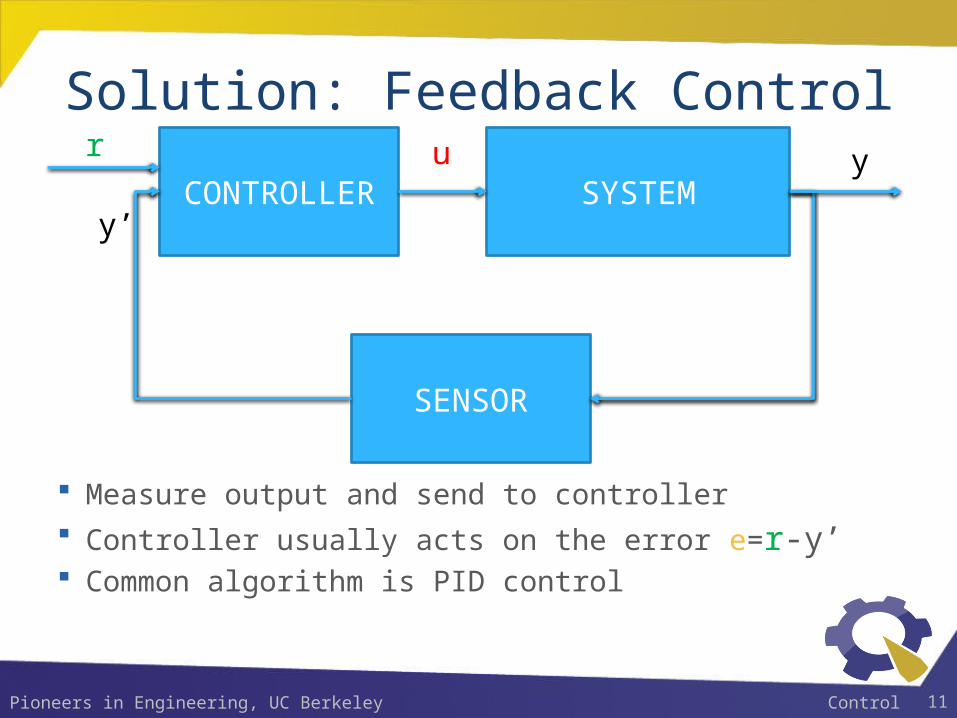
Solution: Feedback Control
SYSTEM
SENSOR
CONTROLLER
r yu
Measure output and send to controller Controller usually acts on the error e=r-y’ Common algorithm is PID control
y’
Pioneers in Engineering, UC Berkeley 12Control
Videos
Inverted Pendulum
Line Following Car
Quadrotors
Pioneers in Engineering, UC Berkeley 13Control
Lesson Agenda
Definition of systems Overview of controls PID Control
Pioneers in Engineering, UC Berkeley 14Control
The PID Controller
Probably the most commonly used controller architecture.
Sufficient for basic linear dynamical systems (basic robot locomotion, arm placement, etc.)

Pioneers in Engineering, UC Berkeley 15Control
The PID architecture
SYSTEM
SENSOR
The PID controller has three basic parts: The proportional (P), integral (I), and derivative (D) blocks.
I
D
P
r ue=r-y’
y’

Pioneers in Engineering, UC Berkeley 16Control
The PID architecture
I
D
P
u
Corrects the current error. Largest input of the three
Improves stability and shapes response
Hammers out residual error. Rejects disturbances

Pioneers in Engineering, UC Berkeley 17Control
PID Tuning – Manual Method
Set Ki and Kd to 0.
Increase Kp until system starts to oscillate, then reduce by about half
Increase Ki until system steady-state (residual) error is acceptable
Increase Kd to shape response
Pioneers in Engineering, UC Berkeley 18Control
PID Demos
Matlab demo
Robot arm demo
Pioneers in Engineering, UC Berkeley 19Control
PID Activity
Download code from wiki page
Change the gains using the tuning technique taught until the arm behaves well
Add a way for the user to control the arm position (suggestion in code)