
Infra-Through Ultrasonic Piezoelectric Acoustic Vector Sensor
Upload
anbarasuasokanCategory
view
411download
0
piezoelectric ultrasonic motor
Presented ByA.Anbarasu,P.Arulprakash,Third year EEE,Excel College Of Engg.&Tech.

STRUCTURE OF THE
PRESENTATION:
•Introduction
•Construction
•Principal Operation
•Classification
•Application
•Advantages
•Conclusion

•In contrast to piezoelectric positioning devices for
one-stroke operation, several types of piezoelectric
linear motors have been developed, which, in
principle, are able to deliver an unlimited stroke.
•Their moving part, the ‘rotor’, comes into contact
with the stator by normal forces and is driven by
frictional forces generated at the interface. In this
way, microscopic small motions of the stator, induced
by piezoelectric elements, are transferred to a
macroscopic linear motion of the rotor.
•This paper deals with ultrasonic motors using
resonant vibrations. Following the historical
background, various ultrasonic motors are
introduced.
INTRODUTION
•Ultrasonic motor construction tends to be simpler than
EM type motors. Fewer assembly parts mean fewer
moving parts and consequently less wear. The number
of components required to construct an USM is small
thereby minimizing the number of potential failure
points.
CONSTRUCTION
•As the ultrasonic motor uses ultrasonic vibrations as its
driving force, it comprises a stator which is a
piezoelectric ceramic material with an elastic body
attached to it, and a rotor to generate ultrasonic
vibrations. It therefore does not use magnets or coils.
•Therefore there is no problem of magnetic field and
interference as in the case of electric motors. In
ultrasonic motors, piezoelectric effect is used and
therefore generates little or no magnetic interference.


Principal Operation•Many polymers, ceramics and molecules are
permanently polarized; that is some parts of the
molecules are positively charged, while other parts are
negatively charged. When an electric field is applied to
these materials, these polarized molecules will align
themselves with the electric field, resulting in induced
dipoles within the molecular or crystal structure of the
material.•Furthermore a permanently polarized material such as
Quartz (SiO2) or Barium Titan ate (BaTiO3) will produce an
electric field when the material changes dimensions as a
result of an imposed mechanical force. These materials
are piezoelectric and this phenomenon is known as
piezoelectric effect.•Conversely, an applied electric field can cause a
piezoelectric material to change dimensions. This is known
as Electrostriction or Reverse piezoelectric effect.


•Therefore does not make use of coils or magnets. It is
a motor with a new concept that does not use
magnetic force as its driving force. It also overcomes
the principles of conventional motors. The wave drives
the comb of the piezoelectric ring.
•When applied, the piezoelectric combs will expand
or contract corresponding to the traveling wave form
and the rotor ring which is pressed against these
combs start rotating.
•When a voltage having a resonance frequency of more
than 20 KHz is applied to the piezoelectric element of an
elastic body (a stator), the piezoelectric element expands
and contracts. If voltage is applied, the material curls. The
direction of the curl depends on the polarity of the applied
voltage and the amount of curl is determined by how many
volts are applied.

Classification
Ultra sonic motor
Standing
wave type
Propagatin
g wave
type
Travelling
wave type
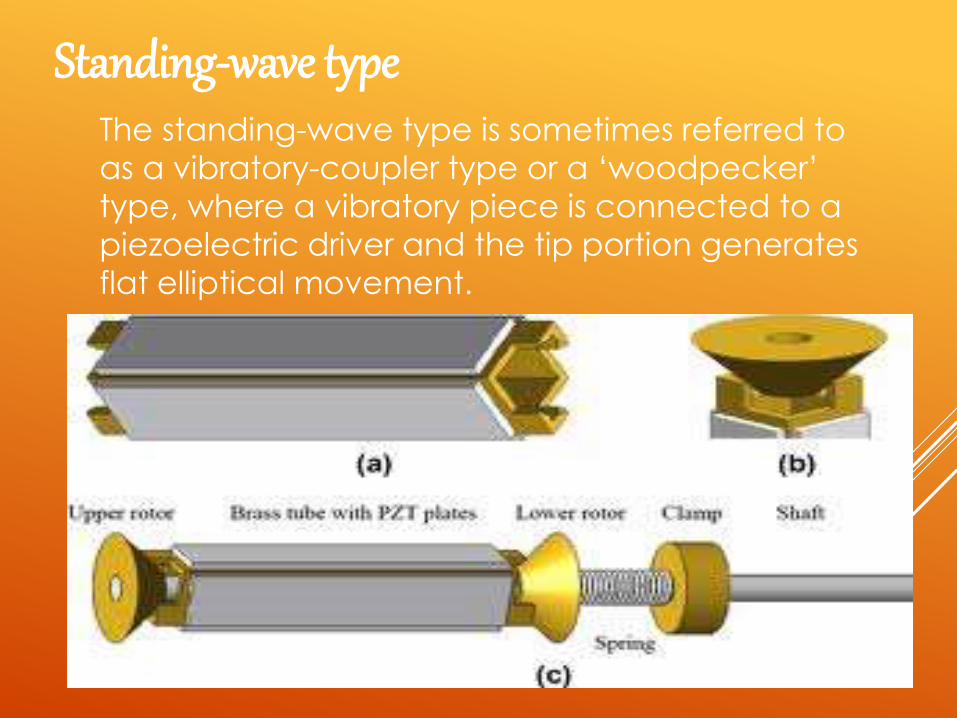
The standing-wave type is sometimes referred to
as a vibratory-coupler type or a ‘woodpecker’
type, where a vibratory piece is connected to a
piezoelectric driver and the tip portion generates
flat elliptical movement.
Standing-wave type

Propagating-wave type
•By comparison, the propagating-wave type
(a surface-wave or ‘surfing’ type) combines two standing
waves with a 90 degree phase difference both in time and in
space. A surface particle of the elastic body draws an
elliptical locus due to the coupling of longitudinal.
•This type requires, in general, two vibration sources to
generate one propagating wave, leading to low efficiency
(not more than 50%), but it is controllable in both the
rotational directions.


Travelling wave type
•The motors consist of a stator that uses piezoelectric
elements to excite vibrations with a frequency in the
ultrasonic range and a rotor (rotary motors) or a slider
(Linear motors) that is driven by a stator via frictional force.
•Rotary ultrasonic motors have been investigated for
several years. Their key features are high thrust forces
related to their volume, a high holding torque without
supply, high torque at low speed and good position
accuracy.

Applications•CD, DVD mastering, testing
•Image stabilization, resolution enhancement
•Photonics alignment & packaging
•Fiber optic switches
•Interferometer
•Vibration cancellation
•Laser beam steering
•Adaptive optics
•Scanning microscopy
•Auto-focus systems
•Nan metrology
•Wafer and mask positioning / alignment
• Microlithography

Advantages•High torque, exceptional
resolution and fast reaction
time.
•piezoelectric motors offer great
potential for miniaturization and can
be used without a gear drive in many
applications.
•As such, they offer significant benefits in motion
and flow control applications throughout diverse
industries, including; medical device, aerospace,
semiconductor, telecommunications,
industrial and automotive

Conclusion
All three motors were characterized individually.
Admittance spectra of the free stators, torque,
power and efficiency values of each motor were
presented. Driving of the motor was enabled by a
switching power supply. It is conventional and cheap.
The design, fabrication and characterization of a
piezoelectric ultrasonic micro motor have been
investigated.


















![Piezoelectric Ultrasonic Micromotors - [email protected]](https://static.fdocuments.us/doc/165x107/6204ee814c89d3190e0cabb2/piezoelectric-ultrasonic-micromotors-emailprotected.jpg)
