PIANC 2003 Guidelines for Managing Wake Wash WG41

of 32
Transcript of PIANC 2003 Guidelines for Managing Wake Wash WG41
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
1/32
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
2/32
C O P
Y R I G
H T P I A
N CPIANC has Technical Commissions concerned with inland waterways and ports (InCom), coastal and oceanwaterways (including ports and harbours) (MarCom), environmental aspects (EnviCom) and sport and pleasurenavigation (RecCom).
This Report has been produced by an international Working Group convened by the Maritime NavigationCommission (MarCom). Members of the Working Group represent several countries and are acknowledged experts in their profession.
The objective of this report is to provide information and recommendations on good practice. Conformity is notobligatory and engineering judgement should be used in its application, especially in special circumstances.This report should be seen as an expert guidance and state of the art on this particular subject. PIANC disclaimsall responsibility in case this report should be presented as an official standard.
PIANC General SecretariatGraaf de Ferraris-gebouw 11th floor
Boulevard du Roi Albert II 20, B.3B-1000 Brussels
BELGIUMhttp://www.pianc-aipcn.orgVAT/TVA BE 408-287-945
ISBN 2-87223-142-0All rights reserved
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
3/32
3 Report of Working Group 41 - MARCOM
C O P
Y R I G
H T P I A
N CCONTENT
Working group members . . . . . . . . . . . . . . . . . . . . . . .4
Technical expert . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . .51.2 Method of undertaking the task . . . . . . . . . . . .51.3 Definition of high-speed vessel . . . . . . . . . . . .5
2. International experience with high-speedvessel wake . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
3. Wave generation and vessel wake . . . . . . . . . . . . . .63.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . .63.2 Wave generation and wake characteristics . . . .6
3.2.1 Conventional wake patterns sub-critical wash . . . . . . . . . . . . . . . .6
3.2.2 Near-critical wash . . . . . . . . . . . . . . .63.2.3 Super-critical wave pattern . . . . . . . . .73.2.4 General mechanisms . . . . . . . . . . . . .8
3.3 Propagation and transformationof high-speed vessel wake . . . . . . . . . . . . . . . .93.3.1 Direction of wave propagation . . . . . .93.3.2 Composition of wash and its frequency
components . . . . . . . . . . . . . . . . . . .103.3.3 Wave transformation and
wave decay . . . . . . . . . . . . . . . . . . .103.4 Wake in coastal areas . . . . . . . . . . . . . . . . . .11
3.4.1 General wave transformation . . . . . .113.4.2 Propagation of vessel wake
in coastal zone . . . . . . . . . . . . . . . . .113.5 Wake generated by non-steady operation . . . .12
3.5.1 Acceleration, deceleration,and extent of wash . . . . . . . . . . . . . .12
3.5.2 Change of wake regime withconstant speed . . . . . . . . . . . . . . . . .12
3.5.3 Focusing the wash during coursechanges . . . . . . . . . . . . . . . . . . . . . .12
3.5.4 Impact of bathymetry on
operational procedures . . . . . . . . . . .133.6 Bernoulli wake and soliton waves . . . . . . . . .133.7 Wake prediction, analysis, and assessment . .13
3.7.1 Numerical prediction of wake . . . . .133.7.2 Full-scale trials and measurements . .153.7.3 Model scale trials . . . . . . . . . . . . . . .173.7.4 Wake analysis . . . . . . . . . . . . . . . . .173.7.5 Wake assessment . . . . . . . . . . . . . . .17
4. Impacts associated with vessel wake . . . . . . . . . . .174.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . .174.2 Safety impacts . . . . . . . . . . . . . . . . . . . . . . . .18
4.2.1 Safety of people . . . . . . . . . . . . . . . .184.2.2 Safety of vessels . . . . . . . . . . . . . . . .184.2.3 Structural damage . . . . . . . . . . . . . .19
4.3 Environmental impact of wake . . . . . . . . . . .20
4.3.1 Overview . . . . . . . . . . . . . . . . . . . . . . .204.3.2 Potential impacts . . . . . . . . . . . . . . .204.3.3 Differentiating between causes . . . . .224.3.4 Predicting environmental impact . . .22
5. Managing vessel wake . . . . . . . . . . . . . . . . . . . . . .225.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . .225.2 Management measures . . . . . . . . . . . . . . . . .23
5.2.1 Vessel design . . . . . . . . . . . . . . . . . .235.2.2 Operational measures . . . . . . . . . . . .235.2.3 Non-operational measures . . . . . . . .24
5.3 Route assessment . . . . . . . . . . . . . . . . . . . . .245.3.1 Overview . . . . . . . . . . . . . . . . . . . . .245.3.2 Route characterization . . . . . . . . . . .245.3.3 Impact identification . . . . . . . . . . . .255.3.4 Developing and assessing potential
management measures . . . . . . . . . . .275.3.5 Monitoring . . . . . . . . . . . . . . . . . . . .28
6. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
References . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Annex A Terms of reference . . . . . . . . . . . . . . . . . .32
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
4/32
C O P
Y R I G
H T P I A
N C
4Report of Working Group 41 - MARCOM
WORKING GROUP MEMBERS
Christian Aage, Technical University of Denmark,Denmark
Adrian Bell (Chair until September 2002), Kirk McClureMorton, Northern Ireland, United Kingdom
Lars Bergdahl, Chalmers University of Technology,Sweden
Alan Blume (Chair), U.S. Coast Guard, United States of America
Ernst Bolt, Ministry of Public Works, Transport and Water Management, Netherlands
Hendrik Eusterbarkey, Federal Waterways and ShippingAdministration, Germany
Tetsuya Hiraishi, Port and Harbour Research Institute,Ministry of Transport, Japan
Henrik Kofoed-Hansen, DHI Water & Environment,Denmark
Denis Maly, Port Authority Bruges-Zeebrugge, Belgium
Martin Single, University of Canterbury, New Zealand
Jorma Rytknen, VTT Manufacturing Technology,Finland
Trevor Whittaker, Queens University, Northern Ireland,United Kingdom
TECHNICAL EXPERT
Bjrn Elser, Queens University, Northern Ireland,United Kingdom
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
5/32
5 Report of Working Group 41 - MARCOM
C O P
Y R I G
H T P I A
N C1. INTRODUCTION
1.1 SUMMARYThe intent of this report is to provide an overview of thehydrodynamic and physical aspects of high-speed vesselwake and to provide guidance for its effective manage-ment. This guidance does not prescribe a solution. Rather,it provides a process that waterway management authori-ties and vessel operators can use to develop an appropriatesolution for managing high-speed vessel wake. This guid-ance is consistent with the International MaritimeOrganizations (IMO) High-Speed Craft Code (2000)and may be used to support the development of the routeoperational manual required by Regulation 18.2.2 of thatCode.
The report does not address other issues associated withthe operation of high-speed vessels that are within the
purview of other organisations (e.g., IMO, theInternational Association of Marine Aids to Navigationand Lighthouse Authorities (IALA)); nor does it addressissues related to vessel design since they are beyond theexpertise of PIANC.
Although these guidelines were developed in response toconcern about the potential impacts of high-speed vesselwake (see Annex A), they can be used as the basis for managing potential impacts of wake generated by any ves-sel.
1.2 METHOD OFUNDERTAKING THE TASK
The working group accomplished its task through a seriesof three meetings and correspondence. Members of the
working group also corresponded with experts in their respective countries.
1.3 DEFINITIONOF HIGH-SPEED VESSEL
For the purpose of this report, the term high-speed ves-sel includes vessels that meet the definition of a high-speed craft in the IMO High-Speed Craft Code (a vesselcapable of a maximum speed equal to or exceeding3.7 0.1667 (m/s), where (m3) is the displacement of the
vessel at the design waterline), or a definition adopted bya national maritime authority.
2. INTERNATIONALEXPERIENCE WITH
HIGH-SPEED VESSEL WAKEReal or perceived safety and environmental impacts asso-ciated with high-speed vessel wake in confined watershave been reported in many locations including Canada(Sandwell, 2000), Denmark (Kofoed-Hansen, 1996;Danish Maritime Authority, 1997; Kirkegaard et al., 1998;Kofoed-Hansen and Mikkelsen, 1997), Great Britain(Marine Accident Investigation Branch, 2000), Ireland (Maritime and Coastguard Agency, 1998), Sweden (Stromand Ziegler, 1998; Allenstrm et al., 2003), The
Netherlands (Anonymous, 2000), New Zealand (Croad and Parnell, 2002; Kirk and Single, 2000; Parnell, 1996;Single and Kirk, 1999), Finland and Estonia (Peltoniemi etal., 2002), and the United States (Anonymous, 1999;Stumbo et al., 1999). To date, much of the research under-taken on high-speed vessel wake wash has appeared onlyas unpublished reports for various authorities and manage-ment agencies.
Wake effects on rivers, lakes, and other inland watersalso can be substantial. For example, see Nanson et al.(1994), Gadd (1994), Pickrill (1985), and referencestherein.
As a result of these reported impacts, vessel operators and waterway managers alike have tried a number of differentapproaches for managing high-speed vessel wake. Theseinclude establishing standards for maximum allowed waveheights, maximum allowed wave energy, speed limits, and risk assessments. Other measures that have been used include the installation of wave-absorbing materials on seawalls and other harbour structures as well as efforts to edu-cate other waterway users about the potential impacts of
high-speed vessel wake. Based on the experience to datefrom these different efforts, it is increasingly apparent thatthe effective management of high-speed vessel wake is amulti-faceted problem that defies a simple one size fitsall solution. It is also apparent that a means of managinghigh-speed vessel wake wash that addresses legitimateconcerns related to waterway safety and protection of themarine environment, while also not unduly restrictingtheir operation, must be identified to realize the full con-tribution of high-speed vessels to the national and globalmarine transportation systems.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
6/32
C O P
Y R I G
H T
P I A N
C
3. WAVE GENERATION ANDVESSEL WAKE
3.1 INTRODUCTION
This section provides a description of the fundamentals of wake wave generation by vessels and wave mechanics. Itcontains the basic information necessary to understand theeffects of wake on the coastline and on other vessels. Thedescription primarily deals with the free wave systemsometimes referred to as Kelvin, Havelock, and Bernoulliwave systems and does not discuss near-vessel or bound wave system problems.
3.2 WAVE GENERATION ANDWAKE CHARACTERISTICS
3.2.1 Conventional wake patterns sub-critical wash
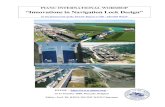
In 1887, Lord Kelvin described the wave system produced by a moving vessel in deep water. This wave pattern isconfined to a wedge shape known as the Kelvin wedge(Fig. 3-1). Within this wedge, which has an apex angle of 19.5, it is possible to distinguish between diverging
waves, propagating at an angle of = 90 to 35 from thevessels track, and transverse waves, propagating at anangle of = 35 to 0 from the vessels track. Under steady conditions, the transverse waves along the vesselstrack travel at the same speed as the vessel.
All vessels operating in deep water produce a Kelvin typewave pattern. In deep water the wavelength is a functionof the wave speed. The higher the vessels speed, thelonger the generated waves become. The most important
parameter for the characterisation of the Kelvin wave pat-tern is the vessels speed related to its waterline lengthgiven in dimensionless terms by the length Froude number ( Fn l ). The length Froude number is defined as:
Fn l = ,
where V (m/s) is the vessel speed, g (m/s 2) is the accelera-tion of gravity, and L (m) is the vessel waterline length.
The Kelvin wave pattern is strictly correct only for a mov-ing point source. The wash of a vessel will be the super-
position of a number of these patterns from many sources,of which the bow and stern wave system will generally bedominant.
When the length Froude number is 0.4 ( Fn l = 2 ) in deepwater, the wavelength of the transverse waves is equal tothe vessels length. The pressure peaks at the bow and stern amplify each other while the wave-making resis-tance, which is the net longitudinal force due to the fluid
pressure of the water acting on the hull, increases signifi-cantly (Lewis, 1988). This speed is called the hump speed and forms a firm barrier for most conventional vessels(Fig. 3-2). Basically the vessel continuously tries to moveuphill, which requires more energy. In practice the resis-tance hump speed most often occurs when length Froudenumbers are between approximately 0.4 and 0.6. High-speed vessels, the subject of these guidelines, are able to
pass through this hump speed in deep water. Thisrequires a relatively high ratio of propulsion power to ves-sel displacement.
The Kelvin wave pattern is only valid for deep-water conditions. Deep water in this context means that thevicinity of the bottom does not affect the propagationspeed of the waves produced.
3.2.2 Near-critical wash
In 1908, Havelock investigated the wave pattern generated by a single point source in shallow water. He introduced the depth Froude number, stating that the characteristics of the wave pattern in depth-limited water are a function of
6Report of Working Group 41 - MARCOM
Figure 3-1 Steady state Kelvin wave pattern(Ekman, 1906; Newman, 1977)
V gL
Figure 3-2 Resistance of a typical ship hullin deep and shallow water
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
7/32
vessel speed and water depth. The depth Froude number ( Fn h) is defined as the ratio of the vessel speed to the wave
propagation speed in shallow water:
Fn h = ,
where: V (m/s) is the vessel speed, g (m/s 2) is the accele-ration of gravity, and h (m) is the water depth. The classi-cal Kelvin wave pattern will be generated at depth Froudenumbers under 0.57. The length of the transverse waves,which are the longest waves in the pattern, will increase asthe depth Froude number becomes larger.
As the depth Froude number approaches 1.0, the vesselsspeed becomes equal to the maximum wave propagationspeed in the given depth of water. This speed is oftenreferred to as the critical speed. At this stage, all transversewaves are left behind the vessel and a wave builds perpen-dicular to the vessel as shown in Figure 3-3. If the vesselstays at critical speed, this wave will extend further fromthe vessels track and build in height. All diverging wavesare found behind this critical wave. The conventionalKelvin wave pattern is often referred to as sub-critical.Where the water depth starts to change the wave patternsignificantly ( Fn h > 0.85), the range is often referred to asthe near-critical speed range.
At critical speed there is one transverse wave that moveswith the vessel and dramatically increases the wave-mak-ing resistance. This is because the energy in the longestwave can no longer disperse generating more waves
behind, as was the case at lower speeds. This is the mainreason most conventional vessels are not capable of exceeding the critical speed. It also needs to be mentioned that the critical wave pattern is unsteady and changes withtime. The shape of the first wave is a function of the dis-tance the vessel has been travelling at critical speed.
3.2.3 Super-critical wave pattern
At higher depth Froude numbers (Fig. 3-4) the transversewaves disappear. They simply cannot keep up with thevessel since the water depth limits their speed. In water of constant depth, the first wave crest in the pattern is straightand the crest length is related to the time the vessel has
been travelling at the particular depth Froude number. Thefollowing waves have curved crests and troughs and arealso continuous.
The angle of propagation for the first wave is determined
by:
cos = 1 / Fn h.
Therefore, as the depth Froude number increases, thewaves bend further backwards and their angle of propaga-tion becomes increasingly perpendicular to the vesselstrack. For example, whereas at a depth Froude number of 1.5 the angle of propagation is approximately 48; at adepth Froude number of 2.0 the angle of propagation is60.
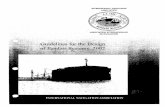
The wash generated by a high-speed vessel operatingabove the critical depth Froude number in shallow water has some unique peculiarities. A typical wave time traceof wash from a high-speed vessel operating in shallowcoastal waters measured 2700 meters from its track isshown in Figure 3-5. The trace has been divided intozones according to wave period and grouping. The firstgroup, Zone I, comprises the long period super-criticalwash waves and is peculiar to high-speed vessels operat-ing above the critical depth Froude number. The second group, Zone II, comprises waves similar in size and heightto the wash waves produced by conventional vessels of comparable displacement and length. Finally there is agroup of tail waves in Zone III. These are peculiar to high-speed vessels with transom sterns.
7 Report of Working Group 41 - MARCOM
V gh
Figure 3-3 Critical wave patternin constant water depth
Figure 3-4 Super-critical wave patternin constant water depth
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
8/32
C O P Y
-
R I G H
T
P I A N
CThe time series was measured at a distance of 2700 metersfrom a catamaran. The average wave periods are 11 sec-onds (s), 5s, and 3s, for Zone I, II and III respectively.
3.2.4 General mechanisms
The basic mechanism of wash propagation is discussed inthe following section. For simplicity, linear wave theory isused, though there is an argument to use higher order wavetheory in very shallow water.
With regards to the propagation of surface water waves thewater depth plays a significant role. In deep water thewave celerity is a function of the wavelength, but in shal-low water the water depth limits the wave celerity. Water depths of more than half the wavelength can be considered as deep water, whereas water depths of less than 1/20 th thewavelength is commonly regarded as shallow water.
Figure 3-6 a) illustrates the deep-water propagation of waves generated by a point source moving from A to B atspeed V . Waves generated at A would have travelled asfar as the outer circle if they had propagated at the indi-vidual wave phase speed (celerity). The fastest and longest waves would have moved along the track to Bwhile shorter and slower waves would have travelled tolocations such as C and D. However, in deep water thewave energy travels at only one-half the phase speed. As aresult, the locus of wave energy, and therefore the largestwave, moves only as far as the inner circle, to points suchas B, C, and D. In the meantime, the point source hasgenerated new waves along its way to B. The energy fromthese waves propagates outward in progressively smaller inner circles. The resulting limit of wave propagation for all waves generated as the ship moves from A to B is tan-gent to the inner circle forming the Kelvin wedge. For anyvalue of V , this forms an apex angle of sin -1 (1/3) =19.5.
8Report of Working Group 41 - MARCOM
Figure 3-5 Typical wave trace of a large high-speed vessel at super-critical depth Froude number with wash zones indicated
Figure 3-6 a) Wave rays for sub-critical operation b) Wave rays for super-critical operation at Fn h = 1.3
a) b)
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
9/32
C O P
Y R I G H
T
P I A
N CThe visible wave pattern then lies mainly inside and alongthe wedge. As individual waves propagate outward attheir phase speed and attempt to outrace the wedge, theydie out and disappear. The largest waves, therefore, formalong the wedge and wave amplitudes diminish within ashort distance outside the wedge (Lighthill, 1978;
Newman, 1977).
A similar wave ray diagram can be drawn for a shallowwater wave pattern and a depth Froude number greater than 1 with the important difference, however, that in shal-low water the celerity and speed of energy propagation areequal. This is shown in Figure 3-6 b) for a depth Froudenumber of 1.3. There are no waves travelling from A at anangle of less than 39.7 in this example. All waves radi-ated at A have travelled as far as the outer semicircle. As
waves in shallow water are non-dispersive, the energy of the wave ray A C has travelled to C. The wave travellingin the direction of D is in intermediate water depth.Hence, the energy has travelled more than half the distanceA D, as this wave is partially dispersive. The wave trav-elling towards F is a deep-water wave, as its wavelength isshort compared to the water depth and, hence, it is fullydispersive. As a result the energy has travelled only half the distance to F'.
3.3 PROPAGATION ANDTRANSFORMATION OF
HIGH-SPEED VESSEL WAKE
The following sections focus on propagation of the freewave field generated by a vessel at super-critical speed.
3.3.1 Direction of wave propagation
The direction of propagation for the leading wave in thesuper-critical wash is only a function of the depth Froude
number. This was originally proposed by Havelock (1908)and proven by various other authors. This relationship is
plotted in Figure 3-7.
Whittaker et al. (2000) studied the divergence between thefirst and the following waves and determined that thisangle is dependent on the depth Froude number. The the-oretical divergence between the first and second leadingcrest is shown in Figure 3-8. The divergence angle isdefined as the difference in propagation direction betweensuccessive waves. Whittaker et al. (2000) has shown thatthis relationship is valid for real wave patterns. At highsuper-critical Froude numbers the waves are more parallelthan at lower super-critical depth Froude numbers. Thedivergence decreases with perpendicular distance from thevessel; the rate of decrease also depends on the water
depth. In deeper water the change in wave pattern is lessthan with the same distance in shallow water.
9 Report of Working Group 41 - MARCOM
Figure 3-7 Angle of wave propagationat outer edge of stationary pattern (sub-critical)
and leading wave (super-critical)
Figure 3-8 Divergence of second wave compared to first with varying depth Froude number and perpendicular distance from vessel normalised by water depth
w
a v e
d i r e c
t i o n
[ ]
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
10/32
C O P Y
R I G H
T P I A N
CWith each successive wave the divergence angle decreasesat constant perpendicular distance from the vessels track.Thus, the waves further back in the pattern becomeincreasingly parallel to each other. Finally, the patterncontains waves whose crests are almost parallel to the ves-sel's track. The slight change in the propagation directionof the waves leads to an apparent lengthening of the wavesfarther from the vessel. Hence, the peak-to-peak distanceof the wave increases with distance from the vessels track.Waves with a period in excess of 40 seconds have beenmeasured 2.7 kilometres from the vessel (MCA, 1998).
Though the wash measured as a time series often appearsas a series of sinusoidal waves each with a slightly shorter
period, the surface elevation is in fact a superposition of aninfinite number of waves. Using the zero crossing period on its own to calculate the wave speed will lead to slight-ly smaller values of wave celerity. Most importantly it hasto be recognised that the period of the waves in a vesselswake is not a function of hull design, but rather of vesselspeed, water depth, and the distance the wave travels fromthe point where it was generated. In contrast, the height of the waves in the wake is a function of the hull design. Ingeneral, for vessels with a similar hull form but differentlengths, the height of waves generated by the shorter ves-sel will be lower than those generated by the longer vessel.The implication is that the period of the waves generated
by vessels of different lengths operating at the same depthFroude number will be the same. However, the wavesgenerated by the shorter vessel will be less pronounced when compared to the waves generated by the longer ves-sel since they will not be as high.
3.3.2 Composition of wash andits frequency components
So far these guidelines have only focused on the locationof crests and troughs in the wave pattern. The wave-mak-ing resistance, which is a significant part of the total resis-tance of a vessel, corresponds to the energy used to gener-ate the wave pattern. This resistance is spread as a contin-uous spectrum over the wave rays radiated from the vessel.
The distribution of the wave-making resistance is oftenreferred to as the free wave spectrum or the amplitude
function. In deep water this distribution is a function of the vessel speed, the hull length and displacement, and thehull shape.
Figure 3-9 a) shows such a distribution for a typical shiphull in deep water. There is a different distribution for each vessel speed for a given hull, or to be more precise,for each length Froude number. In shallow water the dis-tribution is a function of the vessel speed, water depth, hulllength, displacement, and shape. A shallow water distrib-ution for the same vessel speed is given in Figure 3-9 b)for a depth Froude number of 1.3. Note that there are nowave resistance components between = 0 and 39.7,and a large amount of energy is concentrated between39.7 and 60. These resistance components form theleading waves in the super-critical wave pattern. The areaunderneath these curves is proportional to the wave patternresistance. In this case, the area under both curves isalmost equal.
3.3.3 Wave transformation and wave decay
Havelock (1908) investigated the decay of wave heightwith distance at sub-critical depth Froude numbers. Hefound that the decay of both the transverse and divergingwaves is proportional to n, where is the distance fromthe vessel and n is a constant value. He showed that thetheoretical decay inside the Kelvin wedge has the expo-nent n = -1/2 and the waves along the outer edge of thewedge decay have an exponent of n = -1/3.
10Report of Working Group 41 - MARCOM
Figure 3-9 a) Distribution of wave-making resistance over propagation angle ( )b) the resistance is here made dimensionless as resistance coefficient (C w )
Figure 3-10 Decay of wave amplitude
as investigated by Havelock
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
11/32
C O P
Y R I G
H T P I A
N CKofoed-Hansen et al. (1999) suggested a decay rate of n = -0.55 based on a best fit through a wide range of wakemeasurements for catamarans operating at super-criticalspeeds. They also stated that a decay rate of n = -1/3 closeto the vessel (less than 3 vessel lengths) would be moreappropriate. Whittaker et al. (2001) concluded from aseries of towing tank tests in shallow water that the decayrate could be substantially less. The lowest decay rateobserved was as low as n = - 0.2. While Havelock com-
pared the wave height at a straight ray from the vessel (Fig.3-10), the later comparisons are based on the maximumwave height found in wave cuts at different distances per-
pendicular from the vessels track.
3.4 WAKE IN COASTAL AREAS
3.4.1 General wave transformation
There are a number of processes that can affect the waveas it propagates into coastal and shallow water areas. Themost important are listed as follows:
Refraction - the bending of wave fronts and wave heightreductions as they travel into shallower water
Diffraction - the lateral transfer of energy along thewave crest
Shoaling - the alteration in wave height as waves prop-agate into shallow water
Wave-current interaction - the alteration of wave cele-rity and height due to currents
Breaking - energy dissipation due to increased wavesteepness
Friction - energy dissipation due to friction on seabed or obstacles or due to percolation through a porous seabed
Reflection - alteration in wave height due to full or partial reflection from structures or seabed
All these processes are general coastal processes and arenot discussed in detail as part of these guidelines. For more details see Vincent et al. (2002).
3.4.2 Propagation of vessel wakein coastal zone
The propagation of waves from a vessel to the shore can bedivided into two processes:
Vessel speed - depth Froude number based transforma-tion of wake. As described in Section 3.2.3, the first
wave crest of the supercritical wave pattern is straight inconstant water depth, and the angle of propagationdepends only on the ratio of vessel speed to maximumwave speed. The following waves transform, and as aresult the wave period changes with distance from thevessel in water of constant depth.
Transformation of wake due to change in bathymetry.Variations in waterway bathymetry can cause theheight, propagation direction, and celerity of waves tochange. These are common coastal processes as listed in Section 3.4.1.
Both the depth Froude number based transformation and the bathymetric transformation need to be combined to
predict the wash. The leading wave can be treated as a
monochromatic shallow water wave. The following wavesare a superposition of an infinite number of wave compo-nents (see Section 3.3.1). Even in shoaling water, thewaves forming the pattern have different celerities, whichresults in the dispersion of energy from one wave to thenext further back in the trace.
Once in the breaker zone the linear wave theory is nolonger valid. This means that the waves can no longer beconsidered as being sinusoidal. Several wave theorieshave been developed in the past century, which deal withshallow water waves like Boussinesq wave theory, or higher order wave theory (Demirbilek and Vincent, 2002).In some cases the long waves propagating into areas withextremely shallow water, e.g., on mud flats or saltmarshes, can be approximated as solitary waves.
In some studies the leading group of long-period waves,which are often the most critical waves in terms of risk,have been treated as waves with a very narrow spectrum(Kofoed-Hansen et al., 1996 and 1999; MCA, 1998). Thecorrelation between the modelling and some full-scalemeasurements proved to be sufficient for most practical
problems.
Wash and wind waves will superimpose causing localsteepening that can lead to breaking and energy loss.Otherwise, they will pass through each other unchanged.In general, high-speed wash is very small compared tofully developed wind waves. Thus, high-speed wash canhardly be detected in wash measurements with the pres-ence of pronounced wind waves or swells. Vessel washcan, however, still be a problem on the shoreline evenunder storm conditions as the very long period waves arestill present but masked. No evidence has been found thatsuggests that wind affects the long wave components inhigh-speed wash because the interactive time is too shortand the steepness is too small.
11 Report of Working Group 41 - MARCOM
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
12/32
C O P
Y -
R I G H
T P I A
N C
12Report of Working Group 41 - MARCOM
3.5 WAKE GENERATED BYNON-STEADY OPERATION
3.5.1 Acceleration, deceleration,and extent of wash
During acceleration in water of constant depth the wave pattern and the wave resistance will change. When accel-erating from sub-critical to super-critical speeds the vesselhas to pass through a resistance hump at critical speed (seeFig. 3-2). While at near-critical or critical speeds, thewake generated is more energetic vis--vis the wake gen-erated at either sub- or super-critical speeds. It is, there-fore, desirable to pass through the near-critical speed range as quickly as possible. The same applies to deceler-ation, where the operator should aim for a quick decreasein speed near the critical wake regime. The different wakeregimes are shown in Figure 3-11. If possible, the opera-tor should avoid operation at depth Froude numbers
between approximately 0.85 and 1.1.
When accelerating the vessel will produce a wave patternwith a transitional zone. This transitional zone is non-
steady and will change its position and area with time. Asimplified wave pattern generated by a high-speed vesselwith instantaneous acceleration in constant water depth isshown in Figure 3-12. It is assumed the vessel started its
passage at the left and instantly accelerated to a super-crit-ical speed. Three zones can be identified in the graph. Anobject at location A will encounter the full wash waves.An object at location B will experience the same leadingwaves as location A; however, with reduced wave heights.An object at location C may be subjected to little or nowave action from the leading waves. As the vessel contin-ues to operate, some waves will continue to travel toward locations A, B, and C with the boundary of the wash con-tinuously moving outward. Finally, location C willencounter the short tail waves (Fig. 3-5, Zone III). Theimplication is that even if the operator recognised that
unacceptable waves were being generated when the vesselwas abeam of location A and reduced speed immediately,it is likely that substantial wash would still propagate tolocation A.
3.5.2 Change of wake regimewith constant speed
Although a high-speed vessel may continue to operate atconstant speed, the wake regime may change with varia-
tion of water depth along the vessels route. A vesselapproaching a fairway from deep water may operate atsub-critical speeds. Continuation of operation at highspeeds into shallow water results in the transition to criti-cal speed. Depending on the bathymetry the vessel mightoperate for a considerable time at near-critical speeds and finally proceed to super-critical speed or decelerate. It isextremely important to recognise that the wash progress-ing toward the shoreline may have been caused by operat-ing at near-critical depth Froude numbers along an earlier
part of the passage.
3.5.3 Focusing the wash during course changesWhen a vessel changes course, the energy density on theinside of the turn will be higher than the energy density onthe outside of the turn. The difference is more pronounced for larger course changes than smaller changes as well aswhen the vessel is operating at higher speeds. This is
because although the energy transferred into the wake isequal on both sides of the vessels track, it becomesfocused on the inside of the turn insofar as it is transferred into a smaller area. As a result, the waves generated by thevessel will also be higher on the inside of the turn thanthose generated when the vessel is operating on a straightcourse. Similarly, the waves on the outside of the turn will
be lower.
Figure 3-11 Wake regime dependingon speed and water depth
Figure 3-12 Outer envelope and extent of wash
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
13/32
C O P
Y -
R I G H T
P I A N C
To mitigate the higher energy density and waves on theinside of a turn, it may be necessary to increase the radiusof the turn or to make the change in a number of smaller changes with sufficient distance between them to avoid creating areas of increased wash concentration. It mayalso be necessary to reduce speed during the change of course. Particular care should be taken where the focused wash of the inner bend will propagate onto shoaling areas,such as banks or headlands, as a further increase in waveheight can be expected. On the other hand, turns can beused to decrease wash heights on the outer bend, if theoperational area allows such manoeuvres.
3.5.4 Impact of bathymetryon operational procedures
While the variation of water depth along the passage maychange the wake regime it also has a significant impact onthe power requirement of the vessel. As described inSection 3.2.2 and illustrated in Figure 3-2, the resistanceof the vessel increases close to the critical depth Froudenumber. Hence, the vessel needs sufficient propulsion toovercome this resistance peak. A vessel approaching shal-low water might, therefore, proceed at near-critical depthFroude number with constantly decreasing speed whilegenerating a wake with higher energy compared to super-critical operation at the same water depth. This is mostlikely if the vessels speed is reduced for some reason, e.g.,
extra drag due to hull fouling, the vessel is loaded higher beyond its normal service load, or partial power loss(Cain, 2000).
Sudden bathymetric changes can be used to transitionquickly from either a sub- or super-critical wake regime tothe other without prolonged operation at near-criticalspeed. One means of accomplishing this is to construct asteep depth contour in the channel as described byFeldtmann and Garner (1999).
3.6 BERNOULLI WAKE
AND SOLITON WAVES
The dynamic displacement of water caused by the forward movement of a vessel through water results in a velocityfield around the hull (bound wave field). While this veloc-ity field is responsible for the pressure distribution alongthe surface and, hence, the generation of waves, it has lit-tle effect on the far field propagation and transformation of the Kelvin wave pattern (free wave field). However, in aconfined environment, e.g., fairway, shallow water or canal, the flow field can be restricted by the surrounding
boundaries. This is very distinct in inland canals and is
directly related to the blockage.
Theoretically any type of vessel will produce such a dis- placement wave. However, in particular large vessels in
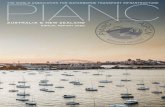
confined water are capable of producing large Bernoulliwakes. Figure 3-13 is an example of a Bernoulli wake gen-erated by a large container vessel in water approximately15 meters deep operating at sub-critical speeds.
A vessel operating close to critical speed (i.e., depthFroude number between 0.85 and 1.1) is capable of gener-ating a solitary wave, which in fact can be faster than thevessel. Both conventional vessels and high-speed vesselscan produce solitary type waves, which are of very long
period and can travel several vessel lengths ahead in veryshallow open water. Large displacement vessels operatingin shallow water are particularly prone to generating thistype of wave (Scott-Russell, 1865; Dand et al., 1999;
Whittaker et al., 2001).
3.7 WAKE PREDICTION,ANALYSIS, AND ASSESSMENT
3.7.1 Numerical prediction of wake
A numerical non-linear time-domain model capable of calculating vessel-generated waves, wave propagation,and wave transformation in non-homogeneous media isthe ultimate tool for evaluating the potential for vesselwake to have adverse safety or environmental impacts.Besides predicting the unstationary flow field and theassociated wave pattern around the vessel hull, the samemodel (preferably) will be able to calculate the dynamicsof the transient waves in the surf zone including the max-imum wave height before wave breaking as well as run-upon beaches and river banks. Such models do not exist yet;however, if they did, they would be far too computational-ly demanding for practical use.
In recent years, the use of computational fluid dynamic(CFD) codes has provided a valuable supplement to moreclassic methods for design and optimisation of vessel
hulls. Comparisons between results from various CFDcodes, full-scale measurements, and towing tank tests haveincreased confidence in using these models for predictionof wake wash caused by multi-hull vessels at varying
13 Report of Working Group 41 - MARCOM
Figure 3-13: Bernoulli wake and Kelvin wake generated by a large container vessel
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
14/32
C O P
Y R I G
H T P I A
N C
14Report of Working Group 41 - MARCOM
water depths. A general limitation of these models is thatthey do not permit calculations of the far-field wave pat-tern. Most often, the calculation is limited to an area with-in approximately three to five vessel lengths.Furthermore, the codes usually only provide a stationarysolution of the potential flow field at a constant depth.
Predicting the impact of the wake for a certain vessel oper-ating on a given route requires, in most cases, the solutionof an unsteady problem in a three-dimensional domain.This is, in most cases, not feasible with one particular numerical model. Hence, the numerical prediction of thewake problem is divided into two different problems:
Prediction of the wave field near the vessel.
Prediction of the wave transformation and propagationin the far field and coastal zone.
Very few numerical models predict both problems; thosethat have been developed to date are coupled methods(Raven, 2000; Kofoed-Hansen et al., 2000).
3.7.1.1 Prediction of the wave field near the vessel
The wave field generated by a vessel can be derived bynumerical methods in several ways. These methods can be
grouped in principle in two categories: panel codes and thin vessel theory models. Because of the inherent limita-tions associated with each type of model, several researchinstitutions are working on hybrid models.
Potential Flow Panel Codes
These codes use a non-linear free-surface potential flowmethod, where the hull and water surfaces are represented
by a large number of panels. As the pressure along the hullis calculated, sinkage and trim can be predicted. Since the
boundary conditions are non-linear the problem cannot besolved directly. The actual wave surface is derived bymeans of iteration starting with a flat surface and an esti-mated trim and sinkage. Shallow water effects can beimplemented. However, as in most codes, the grid moveswith the vessel and only steady state or quasi-steady stateconditions can be computed. Only panel codes with time-stepping treatment have the potential of solving fully non-steady conditions. The computational effort is rather largeand, thus, the computation time can be considerable. Mostmodels calculate the wave elevation or free surface profileup to a few vessel lengths distance from the vessel. A
review of the current capabilities of panel codes can befound in Raven (2000) and Hughes (2001) as well as moredetailed literature.
Thin ship theory code
This theory, which is often referred to as slender body the-ory, assumes the vessel hull(s) to be slender compared totheir length. Most theories represent the body of the ves-sel as a series of Kelvin sources along the centreline of thehull assuming a linear free surface condition. As such thetheory is limited to linear wave theory and in particular small waves compared to the wavelength. The theory
behind these programs originates from work carried out byLord Kelvin, Havelock (1908), Mitchell (1898) and Eggers et al. (1967). The strength of each of the sourcesis derived from the local slope of the hull at a number of water lines. The locations where the local slope is deter-mined are often referred to as panels. The underlyingequations are multiple integrals and are solved directly by
numerical integration. The code can compute only steadystate (constant speed) conditions and shallow water prob-lems. Some programs include the input of reflective
boundaries to simulate tank walls and, thus, allow theresults to be compared with narrow tank experiments.Trim and sinkage is usually user defined. More recentcodes derive the sinkage and trim by means of calculatingthe forces on the hull from the surrounding surface eleva-tion through iteration. Difficulties occur with transomsterns, as basic thin vessel theory cannot deal with flowseparation. Adjustments to the code like artificial appen-dices (virtual stern) or the use of potential flow methods
have helped to improve the predictions significantly. Veryhigh length Froude numbers seem to produce numericalinstabilities with certain codes or the accuracy decreases.Thin ship theory still is heavily used and produces good results for many vessel wash problems. There is no limi-tation to the distance from the vessel at which a wave ele-vation can be computed. However, some programs canonly derive entire wave fields and the computation isrestricted to constant water depth. Other effects like sur-face tension, wave breaking, and seabed shear stress areusually neglected. In particular, due to numerical dampingand other numerical inaccuracies, the error can becometoo large in the far field to be acceptable.
Most thin ship theory programs can be run on a normaldesktop computer and results are obtained within seconds.A description of current programs can be found in Gadd (1999), Molland et al. (2000), Tuck et al. (2001) and Doctors (1997) as well as more detailed literature.
3.7.1.2 Prediction of wave transformation and propaga-tion in the far field and coastal zone
Once the generated waves are no longer influenced by thevessel, other coastal engineering tools can be used to com-
pute the wash propagation over a variable bathymetry. Todate only a few successful approaches have been pub-lished:
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
15/32
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
16/32
3.7.2.2 Monitoring and trial procedures
Full-scale trials can serve two different purposes and as aresult the necessary procedures for undertaking suchassessments may differ.
General vessel performance measurements
Measurement of the wave generation by the vessel and thewave profile at a given distance from the sailing line may
be carried out. In such cases a steady state wave pattern isof interest. These trials are similar to tank tests and, hence,are subject to similar procedures. However, it has to berecognised that conditions are not as controlled as in atowing tank. Apart from the vessel speed over ground,
course over ground, and continuous recording of the ves-sel's position after constant time intervals, it is recom-mended to record still water trim, overall displacement,and operation / control of trim flaps, stabilisers, and foils.It has to be ensured that the vessel has been operating atconstant speed for a distance long enough (in particular close to critical speed). The vessel needs to continue for sufficient distance with constant speed after passing themonitoring location (persistence of wash). It is also desir-able that the seabed is smooth and constant in water depthalong the vessel's track unless deep-water trials are carriedout. The slope of the seabed perpendicular to the vesselstrack should be uniform. However, constant water depthwould be desirable. Preferably trials should be undertak-en with no or minimal current. In any case a repetition of
16Report of Working Group 41 - MARCOM
Type: Quantity measured: Technique: Requirements: Constrains: Reference: (examples)
Wave staff Water elevation Capacitance Mounting pole, Shallow water Parnell & Kofoed-logger only Hansen (2001)
Surveying rod Water elevation Optical Accessibility, Very labour Hannon & Varyani& camera solid structure intensive (1999)
Altimetry Distance from Laser, Solid structure Location Kirk McClure Mortonabove surface Ultra-sound, for transducer (1998), Koushan
Radar et al. (2001)
Subsurface Water elevation / Echo sound Watertight -water depth device
Subsurface Water pressure Piezo transducer Watertight Depth limitation Whittaker (2001),device for short waves Stumbo et al. (1999)
Aqua Particle velocity Acoustic Doppler Watertight device Depth limitation Fissel et al. (2001)Doppler for short waves
Wave Acceleration Accelerometer Floating buoy Small signal for Koushan et al. (2001)riding Buoy with adequate very long waves
size/weight
Table 3-1 Single point measurement techniques for ship wave measurements
Table 3-2 Area measurement techniques (3 dimensional)Type: Technique: Reference:
Stereo photogrammetry Optical, two pictures taken at different locations Inui (1962).of same area at same time
LIDAR Fast scanning laser beam across surface Bolt (2001)and time delay of reflection measured
RADAR Microwave beam scanning surfaceand time delay of reflection measured
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
17/32
17 Report of Working Group 41 - MARCOM
C O P
Y R I G
H T P I A
N Cat least one trial in opposite directions is recommended for repeatability (assuming the vessel is symmetrical). The
background wave climate, with particular attention toother vessels wake, wind generated waves and swells,needs to be minimal to reduce post-processing of the data.
Wake assessment of a vessel along its operational route
It may be necessary to monitor the wake of a vessel alonga given route for risk assessment or numerical modelling
purposes. Due to the variability of the operation, several passages may need to be monitored to cover different tidalstages, variable loading of the vessel or different opera-tional procedures. The monitoring might, therefore, beundertaken over a period of several days. The length of the monitoring window needs to be sufficient to cover thefull extent of wash (possibly more than 40 minutes). It isrecommended to start monitoring well before the vessel
passes the monitoring location. The primary reason is thatwaves could travel ahead of the vessel or the change of operation further out causes larger disturbance than thenearby passage. Monitoring should be continued after the
passage of the concerned vessel until no significant waveshave been measured for a considerable time. It is recom-mended to record at least still water trim, overall displace-ment, and operation of trim flaps, stabilisers, and foils.
3.7.3 Model scale trials
Guidelines on tank testing have been published by theInternational Towing Tank Conference and are not dis-cussed in detail in these guidelines. Information can beobtained through the Naval Architecture Institutions and major naval research institutes and departments. Attentionmay be drawn to the effects caused by the narrow tank width in shallow water tests, which are discussed in Inui(1954). Close to critical speed the towed model is capableof producing a number of solitary waves depending on thedistance towed at such speed Dand et al. (1999). However,this has limited practical relevance. The propulsion systemhas also significant effect on the wave generation by thevessel as shown by Taat et al. (1998). It was found thatthe wave amplitude generated by a water jet propelled model increased by 10 to 40 percent compared to the waveamplitude generated by a towed model. Several researchgroups have used wide shallow water tanks with a tank width of up to 10 vessel lengths to establish an unreflect-ed free wave pattern behind the vessel. Again the towinglength needs to be long enough to generate a steady-state
pattern (persistence of waves).
3.7.4 Wake analysis
Due to the short period of the event and the large spread-ing of periods, wave data needs to be analysed in the full-time domain on a wave-by-wave basis. Frequency domainanalysis of super-critical wash using Fourier transforms isnot recommended due to the low-frequency content of super-critical wash relative to the required sampling time
(moreover the event is transient and not periodic). Modernwavelet analysis might, however, be a good tool for map-
ping both frequency and time information.
Signal preparation: For the removal of high frequencynoise, a filter method of higher order is recommended.A more efficient filter technique that does not result ina phase lag is to make a fast Fourier transform, cut thehigh frequency noise and make an inverse transform.Moving averages may also be used, but are lessfavourable as the signal is not removed but onlysmoothed. Tidal variations or varying offsets may be
best removed with moving averages or high frequency pass filter.
Wave cuts in the space domain derived from numericalsteady state simulations may be converted into the timedomain.
Wave-by-wave analysis: Complying with standard engineering procedures the zero-crossing techniqueshould be adopted. Thus, the wake can be characterised in terms of zero-crossing period and zero-crossingwave height. Otherwise a peak-to-peak analysis can beused.
3.7.5 Wake assessment
The wave generation of the vessel can be assessed usingthe wave-making resistance (denoted using either Rw or the wave resistance coefficient C w) as well as the ratio of the distribution of resistance Rw to the propagation direc-tion ( Rw / ).
As the wave trace is transient, the use of significant waveheight ( H 1/3 or H m0) and average wave energy (energy per unit area) is ambiguous. While significant wave heightdeceptively suggests an average height throughout thewash trace, both values depend on the sample length and
become smaller with large sample lengths for the samewash event. In general, using maximum wave height( H max) and relating maximum wave period ( T max) and dis-tribution of wave height and period through the entirewave trace, e.g., Fig. 3-5, are good measures to character-ize the wake at a given location for risk assessment pur-
poses.
4. IMPACTS ASSOCIATEDWITH VESSEL WAKE
4.1 OVERVIEW
The objective of this section is to highlight some of the potential safety and environmental impacts associated with wake from high-speed vessels. Many of these impactsare based on reported incidents that have been attributed to
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
18/32
18Report of Working Group 41 - MARCOM
C O P
Y R I G H
T P I A
N C
Table 4-1 Impacts related to the safety of people based on shoreline characteristics(Kofoed-Hansen, 1996; MCA, 1998)
Shoreline Characteristics Potential Risk Probable Cause
Shallow sloping beach People may be caught in Rapid inundation of largewater or knocked down areas from run up of long-period waves
Moderate / steep People knocked down Plunging and breaking waves beaches, boat ramps Damage to boats and
vehicles on ramp
Shorelines with sea walls People on narrow beaches Rapid inundation of exposed beachtrapped against sea wall from run up of long-period waves
Breaking waves that overtop the seawall
Some examples are discussed in Kofoed-Hansen and Mikkelsen (1997) and Marine Accident InvestigationBranch report (2000). Although potential impacts associ-ated with wake from high-speed vessels are a legitimateconcern, it is important to note that many of the impactsdiscussed in this section are not unique to these vessels.Wake from other types of vessels can have the same, or very similar, impacts. Although every effort has beenmade to identify the most significant impacts, it is possi
ble that there may be others.
The potential for wake wash to have an adverse impact onsafety or the environment is related to the physical charac-teristics of the waterway and adjacent shoreline as well asthe characteristics of the wake. It is also related to how thewake interacts with the people and vessels that use the
waterway, the structures that are built on, or near thewaterway, and the near-shore flora and fauna. The impli-cation, whether wake will have an adverse impact on safe-ty or the environment, is site specific.
4.2 SAFETY IMPACTS
Safety impacts associated with wake generally involve:
People on or near the shoreline;
Vessels underway or moored; or,
Structures located in, on, or adjacent to the waterway.
4.2.1 Safety of people
Wake characteristics in combination with shoreline fea-tures and waterway topography can be used to identify
potential impacts to the safety of people on or near theshoreline. In general, impacts involving people on or near the shoreline are primarily associated with transverse
waves generated by vessels operating at or near criticalspeed and the long-period waves that comprise the firstgroup of waves generated by vessels operating at super-critical speeds. Impacts that can be attributed to thesewaves based on shoreline characteristics are summarised in Table 4-1. Some of these impacts may be of more con-cern during certain times of the year, e.g., summer monthswhen beaches are being used by bathers, or more pro-nounced during certain environmental conditions, e.g.,high or low tide or during calm weather, when large wavesmay be unexpected.
4.2.2 Safety of vessels
4.2.2.1 Overview
Just as the characteristics of the wake generated by a ves-sel is related to its physical characteristics (e.g., length,
beam, draft, displacement), how another vessel will beimpacted by wake is related to its own physical character-istics (Bolt, 2002). How a vessel responds to wake alsodepends on how it is operated when wake is encountered and is therefore related to the knowledge and skill of thevessels operator. Consequently the specific risk to eachvessel must be assessed individually. This is true regard-less of the type of vessel that generated the wake.However, there are several general observations that can
be made about wake generated by high-speed vessels or
other vessels operating at or near critical speeds (MCA,2001):
All vessels are affected by some part of the near- or super-critical wash due to the wide range of wave peri-ods (see Fig. 3-5).
Small craft are particularly at risk of being swamped, broached, or capsized by the steep, near breaking waves produced by vessels operating in the near-critical zone.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
19/32
19 Report of Working Group 41 - MARCOM
C O P
Y R I G H
T
P I A N
C
Table 4-2 Impacts related to the safety of vessels (Kofoed-Hansen, 1996; MCA, 1998)
Waterway Topography Potential Impact Probable Cause
Open water Small craft may be swamped, Waves generated by vessel operating at broached or capsized critical speed, or short-period, high-amplitude
waves in the third set of waves
Larger vessels may have Long-period waves can causedifficulty maintaining course larger vessels to yaw
Harbour or estuary Vessels with small under keel Long-period waves result in considerableentrances with clearances may ground seiching over large areas with shallow water shallow bars
Small craft may have Wash generated by vessels operating atdifficulty maintaining course trans- and super-critical speeds can create an
oscillating current over bars and shallow banks
Shallow banks (
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
20/32
20Report of Working Group41 - MARCOM
C O P
Y -
R I G H T
P I A N
C
Table 4-3 Potential impacts on moored vessels (MCA, 2001)
Activity Potential Impact Probable Cause
Moored vessels Excessive movement Transverse waves generated by vessels operating(surge, heave and roll) may at or near trans-critical speeds and bothcause moorings to fail, damage long-period and tail waves generated by vesselsto vessels as well as docks and operating at super-critical speeds
piers, vessels to touch bottom
Vessels with small under keel Long-period waves result in considerableclearance may ground seiching over large areas with shallow water
Loading / discharging cargo Disruption of cargo operations Long-period waves generated by vessels operatingthat are sensitive to vessel at super-critical speeds
movement
Vessels alongside a moored Damage to either or both vessels Transverse waves generated by vessels operatingvessel (tugs, bunker barges, due to large relative motion due at or near trans-critical speeds and bothetc.) to different response to waves long-period and tail waves generated by vessels
operating at super-critical speeds
4.2.3.1 Historic and archaeological monuments
The possibility of damage to sites of cultural significance,including historic monuments and archaeological sites, onthe seabed (such as old historical sites and wrecks), and the shoreline (forts and other historical sites) is prevalentin several countries including Denmark, New Zealand, and Sweden. For example, in the archipelago of Gteborg,Sweden, many bays are sheltered from large wind wavesand the tide is minimal. After the introduction of high-speed ferries a several-hundred-year-old burial ground for sailors close to the sea was threatened by wake erosion.Although the erosion was halted in 1997 when the speed of the fast ferries was limited, there is evidence suggestingthat wake from large container ships may be a heavier threat (Svensson, 1999).
4.3 ENVIRONMENTALIMPACT OF WAKE
4.3.1 Overview
All waves, whether generated by the wind or a vessel, canhave some impact on the marine environment. As indicat-ed in Section 4.3.2, there are characteristics of high-speed vessel wake that contribute to its higher propensity vis--vis wake from other vessels to impact the marine environ-ment. However, for the reasons raised in Section 4.3.4 itcannot be assumed a priori that high-speed vessel wake isthe cause of any adverse impacts to the marine environ-ment that might be observed in areas where these vesselsare operating. Determining the cause of adverse impacts
to the marine environment that are observed in a givenarea requires detailed, local studies.
The severity of any environmental impact caused by wakewill depend on how the wash regime differs from the nat-ural wave climate. It is also dependent on the susceptibil-ity of the recipient shores to wave attack. Naturally shel-tered environments and soft sedimentary shores are morelikely to be adversely impacted than naturally exposed environments with rocky shores.
The available literature on the ecological impacts of high-speed vessel wake is limited insofar as most studies havefocused on the wash generated by watercraft other thanhigh speed vessels, i.e. conventional ferries, boats, and
personal water craft (jet skis and wave riders). However,the studies that have been conducted are useful since they
highlight potential effects of high-speed vessel wake onthe marine environment.
4.3.2 Potential impacts
4.3.2.1 Physical change
In general, an increase in wave action, whether from nat-ural causes (e.g., storm events) or vessel wake will resultin higher energy within the coastal system. This increasecan result in an adjustment to the beach environmentincluding beach orientation, erosion, accretion, and increasing the envelope of dynamic change in the attain-ment of a new equilibrium to the wave conditions. Onefactor influencing the vulnerability of a shoreline to beingchanged by waves is its morphological state. In general,
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
21/32
21 Report of Working Group 41 - MARCOM
C O P
Y -
R I G H
T
P I A N C
Table 4.4 Physical impacts of vessel wake(Bell et al., 2000; Kirk McClure Morton, 2000; Single, 2002)
Potential Impact Probable Cause
Sediment TransportSediment resuspension Long-period waves penetrate deeper into the water column thanand associated increase shorter-period waves and can disturb bottom sediments farther in turbidity off-shore than would likely occur under normal conditions.
Cross-shore and long-shore Large, steep waves similar to storm generated waves can move sedimenttransport of bottom sediment seaward; if they attack the beach at an angle, the material will be transported and associated accretion along the shore. Short, steep waves may transport material onto higher or erosion sections of the beach. Depending on the angle of attack, wake wash
encountering the shore can result in either cross-shore or long-shore transport
of sand and other shoreline material. Large, steep waves, similar to thosegenerated by storm waves, can move material seaward and form a barin front of the beach. If the waves attack the beach at an angle,the material will be moved along the beach. Short, steep waves can movematerial higher up on the beach. High-speed vessel wake wash has beenobserved to result in both accretion and erosion.
Weathering of Rocky Shores The impact of the incoming wave and the resulting fluctuations in crackscan separate layers of rock from the bedrock. Laboratory measurements suggestthat regular waves, e.g., vessel wake wash, generate higher crack pressuresthan mixed waves, e.g., wind generated waves, of similar magnitude.
Hence the weathering of rocky shores by the leading waves of the wakefrom high-speed vessels may be larger than the weathering induced by comparable natural seas.
a stable shoreline is less vulnerable to attack than one thathas been previously disturbed, either because of prior storm events or human activity (e.g., shoreline construc-tion or sediment removal). The vulnerability of a coastalzone to wave attack is also dependent upon its materialcomposition and typical particle size.
The addition of energy to the system from wake can causesediment mobilisation and accelerated weathering of rocky shores. The probable wake related causes of theseimpacts are summarised in Table 4-4.
Changes to the physical environment, with particular emphasis on sediment transport, can cause a variety of dif-ferent environmental impacts. Mobilisation of larger sed-iments can result in rapid changes to biological communi-
ties. Sedentary organisms may be relocated, crushed, and damaged as the rocks and boulders on which they areattached are rolled around. Resuspension of finer sedi-ments can create an abrasive environment that may dam-age soft-bodied animals and algae and prevent spores fromsettling. When sediments do settle out, they can potential-ly smother benthic organisms and cover fish eggs and spawning grounds. Aquatic plants can be physiologically
impaired if their surfaces are covered with silt.Resuspension of sediments also increases the turbidity of the water, and by blocking the light that reaches the bot-tom can have an adverse impact on benthic organisms.
4.3.2.2 Impacts on flora and fauna
The flora and fauna that inhabit coastal environments aresubject to inundation as well as the hydrodynamic forcesassociated with both wind and vessel generated waves.Waves are a primary agent of ecological disturbance thataffect individuals, populations, and communities to vary-ing degrees. The potential biological impacts of wake oncoastal and shoreline habitats, which are summarised inTable 4-5, are a consequence of changes to the natural
physical environment or natural wave climate. Without
external influences, near-shore and intertidal habitats mayexist in a state of long-term equilibrium. Although anincrease in the energy within a coastal system by intro-ducing vessel wake can be sufficient to upset the equilib-rium (Kirk McClure Morton, 2000), it is usually difficultto assess changes caused by a changed wave regime due tovessel wake.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
22/32
Report of Working Group 41- MARCOM
C O
P Y -
R I G
H T
P I A N C
Table 4-5 Biological impacts of vessel wake(Danish Maritime Institute, 1997; Bell et al., 2000; Hotchkiss et al., 2002)
Potential Impact Probable Cause
Fixed and mobile organisms may be dislodged and stranded; Waves with higher than ambient energy plants may be broken and or uprooted. Overtime species due to wake wash breaking on individualdistribution within the intertidal and near shore zone may change; plants and animals. Sediment mobilisationsome species may be removed can damage individual organisms as well as
cause habitat loss.
Smothering of plants, sedimentary animals, and spawning grounds Settling out of fine, suspended sediment
Loss of sea grasses Turbidity from sediment mobilisation canreduce the amount of light reachingthe bottom
Altered distribution of species within the intertidal zone Increased immersion due to regular inundation of intertidal zone
Localized algal blooms and associated increase in turbidity Resuspension of nutrients associated withsediment mobilisation
Reduced productivity and loss of bird nesting areas; change in Beach nesting and shoreline feeding areasfeeding behaviour of birds, lower over wintering survival rates inundated by run up of long period waves;
cliff nesting areas inundated by breaking waves
Reduced productivity of seal rookeries; loss of haul-out areas Inundation by breaking waves
4.3.3 Differentiating between causes
Although high-speed vessels (e.g., high-speed ferries)have been in operation for over ten years, relatively little isknown about the impact of their wake on the marine envi-ronment vis--vis the wake from other types of vessels.This is mainly due to the difficulty of distinguishing
between impacts that result from different causes includ-ing normal wind generated waves, storms, high-speed and non high-speed vessel wake, and other human activities.Making such a distinction is particularly difficult since thecoastal environment naturally is always undergoing somechange (Kirk McClure Morton, 2000).
4.3.4 Predicting environmental impact
Even though most coastal areas are always undergoingsome change, the physical and biological environment of a beach or a coastline generally is shaped by the predomi-nant wave climate, which is the product of both regular wind and storm generated waves as well as vessel wake.Hence, if the wave climate changes significantly, it is rea-sonable to expect that the coastline and its physical and
biological properties will also change, although it is notalways immediately apparent how the change will become
manifest. The implication is that any effort to assess howhigh-speed vessel wake may impact the marine environ-ment will require the comparison of data obtained both
before and after a particular shoreline is exposed to wakefrom these vessels. It should be noted that in many casesthe physical impact could be initially large and then
become more stable; therefore, any assessed impacts based on initial trends could possibly result in overesti-mating the impact. Although models can be developed tohelp predict how wake might impact a particular shoreline,given the complexity of shoreline systems, model resultsshould not be generalized to similar shorelines in other areas (Bell et al., 2000).
5. MANAGING VESSEL WAKE
5.1 INTRODUCTION
Concern about the potential safety and environmentalimpact of high-speed vessel wake are causing high-speed vessel operators and waterway managers to establisheither voluntary or mandatory management measures.Establishing effective management measures for high-speed vessel wake requires an understanding of the causal
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
23/32
23 Report of Working Group 41 - MARCOM
C O P
Y R I G
H T P I A
N Crelationship between a vessels wake and its actual or
potential impact. As discussed in Sections 3 and 4, estab-lishing this causal relationship is a multi-faceted problemthat requires understanding how wake interacts with other vessels, people, structures, and near-shore flora and faunaas well as the bottom and shoreline of the waterway. Thisrequires knowledge of the physical characteristics of thewake generated by the vessel as well as how the wake isaffected by the physical characteristics of the waterway asit propagates away from the vessels line of travel and shoals to break at the shore. It also requires understandingthe effect of the management measures that are considered on wake generation to ensure that the measures imple-mented will be effective and that they will not result inunintended consequences. The implication is that there is
not a simple, universal solution for managing high-speed wake insofar as how wake interacts with the physical envi-ronment and human activities is site specific. In addition,there are differences in the wake generated by differenthull forms and sizes and operating speeds differencesthat may permit alternative ways of mitigating the poten-tial impact.
5.2 MANAGEMENT MEASURES
Mitigation measures can be divided into three categories:vessel design, operational measures, and non-operationalmeasures. It is likely that the management regime adopt-ed for any given route will involve a combination of oper-ational and non-operational measures.
5.2.1 Vessel design
Insofar as the wake generated by a vessel is directly relat-ed to its hull form, vessel design is a primary means of managing wake. Although it is possible to modify a ves-sel after it is constructed (e.g., increasing its length or installing trim tabs or interceptors) to improve the charac-
teristics of the wake that is generated, the cost of doing somay be prohibitive. Similarly, modifications may be pro-hibited by regulatory requirements or physical constraints.Therefore, naval architects should understand the potentialimplications of the wake generated by a given hull designfor wake management and consider any wash criteriarelated to the intended route including design require-ments, along with emissions, speed, and other limiting fac-tors. There are, however, key features of high-speed ves-sel wake that cannot be reduced or removed by optimisingthe hull form and design ratios. An example is the wave
period, which generally increases with vessel speed and
distance from the navigation line and is a particularlyimportant parameter in wave impact in shallow water areas.
5.2.2 Operational measures
Operational measures can be used to reduce both the safe-ty and environmental impacts of wake. Because the poten-tial impacts of wake are related to the physical character-istics of both the vessel and the waterway, operationalmeasures are generally related to the route or the vesselsoperational profile. Insofar as ferry routes are a functionof geography, it is usually not possible to reduce potentialimpacts by selecting an alternate route. However, there aresome changes that might be possible, including
Moving a route farther from shore to increase the dis-tance between the vessels track and the area wherewake impacts are of concern.
Establishing route segments so that changes in water depth do not cause the vessel to transition from sub-critical or super-critical speeds into the critical speed range.
Relocating where course or speed changes are made toavoid focusing wake at a particular location or to avoid generating wash associated with the critical speed range.
Altering the orientation of a route relative to the shore-
line to change the angle at which the wake encountersan area of concern.
Modifying the schedule to reduce the potential for impacts that may be associated with predicable shore-line use or environmental factors (e.g., tide or sustained winds from a particular direction).
Although the characteristics of the wake generated by avessel are a function of the hull form and cannot be altered unless the vessel undergoes modifications after it is con-structed, there are several operational measures related tothe vessels operational profile that can be used to reducethe potential impacts of vessel wake. These include
Training vessel masters and mates so that they under-stand the relationship between the navigation of thevessel and the generation of wake.
Ensuring that the navigation of the vessel conformswith the courses and speeds established for each leg of the route.
Ensuring that the vessel is trimmed on each run to min-imize the wake that is generated.
Establishing contingency plans for situations (e.g., lossof engine power), or other situations when it may not be
possible to follow normal operating procedures.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
24/32
24Report of Working Group 41 - MARCOM
C O P
Y R I G
H T P I A
N C5.2.3 Non-operational measures
The intent of non-operational management measures is to
reduce safety related impacts of wake by lessening the potential for people and small craft to interact directlywith wake. Some non-operational measures include:
Posting signs on shore or including notices on naviga-tion charts in areas where high-speed vessel wakemight reasonably be encountered.
Engaging in outreach activities to ensure the public isaware of the potential impacts associated with wake.
Designing new sea walls and quay walls or retro-fitting
existing ones with wave absorbing materials to reducewave amplification by reflection. And,
Coordinating with other operators and harbour authori-ties or owners to identify impacts and means of mitiga-tion.
Non-operational measures intended to inform the publicare particularly important in areas where wake from high-speed vessels is not actively managed or is a new activity.
5.3 ROUTE ASSESSMENT
5.3.1 Overview
Developing appropriate management measures for high-speed vessel wake requires identifying the potential safetyand environmental impacts the wash may have. Thisrequires ensuring that the interrelationship of wake gener-ation, transformation, and impact is understood. Since theimpacts that may occur are the result of a number of fac-tors, including wake generation and transformation, the
physical characteristics of the waterway and its shoreline,
as well as how the waterway and shoreline are used, thisinterrelationship is route dependent. The route assessmentis an objective, systematic process for identifying potentialimpacts and for developing management measures thatmay be implemented by vessel operators and waterwaymanagers that are appropriate for a particular route.
A route assessment is intentionally flexible so that it can be applied to different waterways and different vessels. Itis also flexible with regard to the outcome. In other words,it does not favour one measure for reducing potential wakeimpacts over any other. Similarly, whereas in some
instances a single management measure may be sufficientto prevent an impact from occurring, there may be other cases where a suite of different measures may be needed.
Another aspect of the model is that it is scaleable so thelevel of effort is appropriate for the safety and environ-mental impacts being considered. The process involvesfour steps:
1. Characterizing the route.
2. Identifying the potential impacts and severity of wake.
3. Developing and assessing potential management mea-sures.
4. Implementing and monitoring management measures.
Conducting a route assessment requires an understandingof specific vessel and route variables. The information
needed to conduct the route assessment can be grouped into five general areas:
1. The characteristics of the vessels wake in its entireoperational envelope.
2. The bathymetry and shoreline topography of the pro- posed route.
3. Waterway activities along the route.
4. Shore activities along the route.
5. Properties of the physical and biological environmentof the adjacent coastline.
5.3.2 Route characterization
Route characterization involves dividing the planned routeor routes, if alternatives are available, into segments.Although there are a number of ways this can be accom-
plished, the most practical approach is to segment theroute according to where the vessel will be operating atsub-critical, near-critical, and super-critical speeds based
on the ranges of depth Froude numbers described inFigure 5-1. In addition, deep-water operation might besegmented by conventional low speed and high speed sub-critical speeds (MCA, 1998). Stumbo et al. (2000)have observed that in deep water the transition from con-ventional low speed to high speed sub-critical speed occurs when vessels have a length Froude number
between 0.65 and 0.9. Using depth Froude numbers, and length Froude numbers when appropriate, to segment theroute provides a means of conducting a first order assess-ment of potential wake impacts along a planned route. Itmay identify places where some change to the route (e.g.,
a speed or course change), may eliminate or at least sig-nificantly reduce some of the potential wake impacts.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
25/32
Report of Working Group 41 - MARCOM
C O
P Y -
R I G
H T
P I A N C
Figure 5-1 Operational zones for route characterization based on wash regimes
5.3.3 Impact identification
Once the route is divided into segments, the type and loca-tion as well as the likelihood and severity of the potentialimpacts that wake may have on each segment of the routemust be identified. It is also necessary to identify theaspect of wake that may cause the impact and then deter-mine whether wake from high-speed vessels is a primary,secondary, or tertiary cause of the identified impact.
5.3.3.1 Identifying potential impacts
Identifying potential wake impacts requires first ascertain-
ing who, (e.g., swimmers or people near the shore), or what, (e.g., small-craft underway or moored in marinas,near-shore or coastal marine habitats, or waterfront struc-tures) may be impacted. It also requires determining thelocations where wake impacts can reasonably be expected to occur. The description of where an impact may occur should include some reference to the shoreline (e.g., off-shore, near-shore, on-shore), as well as a geographic ref-erence (e.g., the name of a location or other landmark).Although latitude and longitude may be useful for provid-ing more precise locations, the use of common names pro-vides a means to quickly identify areas where wake mayhave an adverse impact.
Identifying potential wake impacts requires understandingof how the waterway is used as well as information about
the characteristics of the waterways natural and physical
environment. There are any number of ways that this can be accomplished, including site surveys and meeting withrepresentatives of different waterway users, naturalresource agencies, and land owners. It is likely that thelevel of effort required to identify potential safety and environmental impacts will vary between routes and
between different segments of the same route. Regardlessof the means and level of effort employed, it is importantthat the result is a complete picture of the type and loca-tion of the potential safety and environmental impacts thatwake may have on each segment of the route.
When identifying potential impacts, it is helpful to estab-lish when a particular impact may occur. Determiningwhen an impact might occur is needed for determining thefrequency that high-speed vessel wake might cause a
potential impact. It also might help to highlight possiblecausal relationships that have to exist for an impact tooccur (e.g., state of the tide or sustained winds from agiven direction). Several different timeframes can be used when identifying when an impact might occur. Whereassome potential impacts might occur multiple times a day,others might occur infrequently, for example, those thatare related to seasonal weather patterns. Establishing the
timeframe might also help highlight impacts that are notexclusively related to wake from high-speed vessels.
-
8/10/2019 PIANC 2003 Guidelines for Managing Wake Wash WG41
26/32
C O
P Y -
R I G H
T
P I A N C
5.3.3.2 Wake components
To develop appropriate management measures it is neces-sary to determine both the component of wake (i.e., waveheight, wave length, energy, and the magnitude of thehigh-speed vessels wake) in terms of characteristic waveheight/energy, wave period/length and wave direction thatmight be expected to cause each of the potential impacts
that are identified. In some instances there may be morethan one component that might be of concern. Failure toidentify the component, or components, of wake that rea-sonably can be expected to cause a potential impact canresult in developing management measures that are notappropriate.
5.3.3.3 Likelihood and consequence of potential impacts
After the potential impacts and the responsible componentof high-speed vessel wake have been identified, it is nec-essary to assess both the likelihood that a particular impactwill occur and its potential consequence. Suggested scalesfor assigning likelihood and consequence scores areshown in Table 5-1. It is recognized that the descriptionsand definitions for the different scores are somewhat sub-
jective. This is unavoidable since, for the most part, there
will be limited site-specific data available upon which to base assessment. Therefore, the assessment must be based on the best available information and the experience of those who are conducting it.
5.3.3.4 How important is wake?
Once the preceding steps have been completed, a determi-
nation should be made whether high-speed vessel wake isa primary, secondary, or tertiary cause of the potentialimpacts that are identified. Making such a determinationis necessary to help provide some basis for establishing theextent to which a high-speed vessel operator should rea-sonably be expected to be responsible for preventing a
potential impact from occurring. Making this determina-tion will require having an understanding of the impactsthat may be caused by other vessels as well as those thatresult from natural processes. It will also require anunderstanding of the physical differences of waves gener-ated by other vessels as well as those generated by natural
processes vis--vis those generated by high-speed vessels.As discussed in Section 4.3.3, it is recognized that it maynot always be possible to make this determination with ahigh degree of certainty.
26Report of Working Group 41 - MARCOM
Table 5-1 Likelihood and consequence scores
LikelihoodScore Description Examples
5 Very Likely Every