Physical Design Arnab

of 49
-
Upload
prasanna810243 -
Category
Documents
-
view
226 -
download
0
Transcript of Physical Design Arnab
-
8/11/2019 Physical Design Arnab
1/49
VLSI Physical Design AutomationIntroduction, Partitioning, Floor-planning
VLSI Physical Design AutomationVLSI Physical Design AutomationIntroduction, Partitioning, Floor Introduction, Partitioning, Floor --planningplanning
Arnab Arnab Sarkar Sarkar Dept. of Computer Sc. &Dept. of Computer Sc. &EnggEngg.,.,Indian Institute of Technology Kharagpur Indian Institute of Technology Kharagpur
Advanced VLSI Design Lab., IIT Kgp
-
8/11/2019 Physical Design Arnab
2/49
2 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
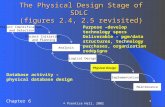
VLSI Design CycleVLSI Design Cycle
System SpecificationSystem Specification
Architectural DesignArchitectural Design
Functional DesignFunctional Design
Logic DesignLogic Design
Circuit DesignCircuit Design
Physical DesignPhysical Design
FabricationFabrication
Packaging, Testing andPackaging, Testing and
DebuggingDebugging
X=(AB*CD)+(A+D)+(A(B+C)) Y=(A(B+C))+AC+D+A(BC+D))
-
8/11/2019 Physical Design Arnab
3/49
3 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Physical DesignPhysical Design
Physical design processPhysical design process The process of converting the specification of an electricalThe process of converting the specification of an electrical
circuit calledcircuit called netlistnetlist into a geometric representation called layout.into a geometric representation called layout.
Physical Design AutomationPhysical Design Automation Deals with the research and development of algorithms and dataDeals with the research and development of algorithms and data
structures related to physical design process.structures related to physical design process.
-
8/11/2019 Physical Design Arnab
4/49
4 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Physical Design CyclePhysical Design Cycle
Stages:Stages:
PartitioningPartitioning
Floor Floor --PlanningPlanning
PlacementPlacement
RoutingRouting
CompactionCompaction
Physical DesignCircuitDesign
(a)
(b)
(c)
(d)
Partitioning
Floorplanning&
Placement
Routing
Compaction
Fabrication
cutline 2
cutline 1
-
8/11/2019 Physical Design Arnab
5/49
5 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Design StylesDesign Styles
FullFull --Custom DesignCustom Design
Standard CellStandard Cell
Gate ArrayGate ArrayFPGAFPGA
-
8/11/2019 Physical Design Arnab
6/49
6 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
FullFull --Custom Design StyleCustom Design Style
Designers can control the shape of all mask patternsDesigners can control the shape of all mask patterns
Designers can specify the design up to the level ofDesigners can specify the design up to the level of
individual transistorsindividual transistors
-
8/11/2019 Physical Design Arnab
7/49
7 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Standard Cell Design StyleStandard Cell Design Style
Selects preSelects pre --designed cells (of same height) todesigned cells (of same height) to
implement logic.implement logic.
-
8/11/2019 Physical Design Arnab
8/49
8 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Gate Array Design StyleGate Array Design Style
Prefabricates a transistor array.Prefabricates a transistor array.
Needs wiring customization to implement logic.Needs wiring customization to implement logic.
-
8/11/2019 Physical Design Arnab
9/49
9 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
FPGA Design StyleFPGA Design Style
Logic and interconnects are both prefabricated.Logic and interconnects are both prefabricated.
Illustrated by a symmetric arrayIllustrated by a symmetric array --based FPGAbased FPGA
-
8/11/2019 Physical Design Arnab
10/49
10 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Comparison of Design StylesComparison of Design Styles
-
8/11/2019 Physical Design Arnab
11/49
11 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Comparison of Design StylesComparison of Design Styles
-
8/11/2019 Physical Design Arnab
12/49
12 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Layout RepresentationLayout Representation
Layout Editor Layout Editor A CAD tool that allows a human designer to createA CAD tool that allows a human designer to create
and edit a VLSI layout.and edit a VLSI layout.
A layout is a collection of tilesA layout is a collection of tiles A tile is a rectangular section within a single layer.A tile is a rectangular section within a single layer. Tiles are not allowed to overlap within a layer.Tiles are not allowed to overlap within a layer. The elements of a layout are referred to as blockThe elements of a layout are referred to as block
tiles.tiles. The area of a block that does not contain a block isThe area of a block that does not contain a block is
referred to as vacant space.referred to as vacant space. Vacant space can be partitioned into a series ofVacant space can be partitioned into a series of
vacant tiles.vacant tiles.
-
8/11/2019 Physical Design Arnab
13/49
13 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Layout Representation ExamplesLayout Representation Examples
-
8/11/2019 Physical Design Arnab
14/49
14 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Data Structures for Layout RepresentationData Structures for Layout Representation
-
8/11/2019 Physical Design Arnab
15/49
-
8/11/2019 Physical Design Arnab
16/49
16 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Atomic Operations for layout EditorsAtomic Operations for layout Editors
Basic Atomic Operations (Contd.)Basic Atomic Operations (Contd.) Directed Area EnumerationDirected Area Enumeration : Given a fixed area: Given a fixed area A A ,,
visit each block intersectingvisit each block intersecting A A exactly once in aexactly once in a
sorted order.sorted order. Block InsertionBlock Insertion : Insert a new block B such that it: Insert a new block B such that it
does not intersect with any existing block.does not intersect with any existing block. Block DeletionBlock Deletion :: Remove blockRemove block BB from layout.from layout. Plowing Plowing : Given an area: Given an area A A and directionand direction d d , remove, remove
all blocksall blocks BB i i fromfrom A A by shifting them in directionby shifting them in direction d d while preserving their order.while preserving their order.
CompactionCompaction : Plowing or compressing the entire: Plowing or compressing the entirelayout.layout. Channel GenerationChannel Generation : Determining vacant space in: Determining vacant space in
layout and partitioning it into tiles.layout and partitioning it into tiles.
-
8/11/2019 Physical Design Arnab
17/49
17 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Corner Stitching Data Structure
A floor with some solid tiles (blocks) are given.
Partition the floor with maximal horizontal strips to define blank orvacant tiles.
For each tile, store its position, size description, and otherattributes.
Insert corner stitches (pointers), 4 per tile (for both solid andvacant) pointing to the appropriate neighboring tiles.
-
8/11/2019 Physical Design Arnab
18/49
18 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Point Finding using Corner StitchesPoint Finding using Corner Stitches
Given a point pGiven a point p 22 , find a path through the corner, find a path through the cornerstitches from the current point pstitches from the current point p 11 to pto p 22 traversing thetraversing theminimum number of tiles.minimum number of tiles.
StepsSteps1.1. Move up or down using theMove up or down using the rtrt or lb pointers until aor lb pointers until a
tile is found whose vertical range contains thetile is found whose vertical range contains the
destination point.destination point.2.2. Move left or right usingMove left or right using tr tr oror blbl pointers until a tilepointers until a tile
is found whose horizontal range contains theis found whose horizontal range contains thedestination point.destination point.
3.3. Whenever there is a misalignment (search goesWhenever there is a misalignment (search goesout of the horizontal range of the tile that containsout of the horizontal range of the tile that containsthe destination point) due to the abovethe destination point) due to the above
operations, repeat steps 1 and 2.operations, repeat steps 1 and 2.
-
8/11/2019 Physical Design Arnab
19/49
19 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Point Finding using Corner StitchesPoint Finding using Corner Stitches
-
8/11/2019 Physical Design Arnab
20/49
20 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
PartitioningPartitioning
The process of decomposition of a large system into independentmanageable subsystems which can be designed independently andconcurrently
Input a set of components or modules a netlist
in the form of a weighted graph or hypergraph: nodesrepresenting modules; edge or hyperedge representing a net
Output a set of subcircuits that when connected, function as the original
circuit terminals required for each subcircuit to be connected to othersubcircuits
-
8/11/2019 Physical Design Arnab
21/49
21 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Levels of PartitioningLevels of Partitioning
-
8/11/2019 Physical Design Arnab
22/49
22 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Partitioning ExamplePartitioning Example
-
8/11/2019 Physical Design Arnab
23/49
23 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
PartitioningPartitioning Problem FormulationProblem Formulation
Given aGiven a hypergraphhypergraph G G = (= ( V V ,, E E )) Vertex = a component.Vertex = a component. HyperedgeHyperedge = a= a net net -- a connection between two components.a connection between two components.
NetNet -- a set of electrically equivalent terminalsa set of electrically equivalent terminals a(v a(v i i ) ) = area of a component= area of a component A(V A(V i i ) ) == a(v a(v ) ) ,, vv V V ii (Area of partition(Area of partition V V i i )) P = {pP = {p 11 ,, , p, p mm } } (set of(set of hyperpathshyperpaths ).).
H(pH(p i i ) = ) = number of timesnumber of times p p i i is cut; affects delay due to partitioning.is cut; affects delay due to partitioning.ObjectiveObjective
PartitionPartition V V into disjoint clusters Vinto disjoint clusters V 11 ,, ,, VVk k , such that cut, such that cut --size andsize andmax(max( H(pH(p i i ) ) ) are minimized.) are minimized.
ConstraintsConstraints Number of terminals in a partition has an upper boundNumber of terminals in a partition has an upper bound Area of each partitionArea of each partition
Number of partitions must be within a rangeNumber of partitions must be within a range
-
8/11/2019 Physical Design Arnab
24/49
24 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
KernighanKernighan --Lin (KL) Partitioning AlgorithmLin (KL) Partitioning Algorithm
A groupA group --migration based algorithmmigration based algorithm starts with an initial partition, generated randomly moves components between partitions to improve
Problem FormulationProblem Formulation Input
An undirected graph G(V,E), |V| = 2n and |E| = m Cost or weight d(a,b) for each edge (a,b) in E
Output Two partitions X and Y such that the total cost of the
cut is minimized, and each partition has n vertices
-
8/11/2019 Physical Design Arnab
25/49
25 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
BipartitionBipartition -- Without HeuristicsWithout Heuristics
Try all possible bisections. Find the best one.
For 2n vertices, # of possibilities = ( 2n Cn) = nO(n)
For 100 vertices, there are 5 10 28 possibilities.
Take 1.59 x 1013
years if one can try 100M possibilitiesper second.
-
8/11/2019 Physical Design Arnab
26/49
26 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
KL AlgorithmKL Algorithm
Start with an initial bisection P = {X, Y};
Repeat repeat
Choose a pair of free cells a X, b Y s.t.exchanging a and b gives the highest gain,gain(a,b);
Tentatively exchange a and b, and lock a and b; Let g i = gain(a,b);
until all pairs are locked; Unlock all vertices; Find k s.t. G = g 1 + g 2 + .. + g k is maximized and
actually exchange cell pairs up to this k th step;
Until G = 0;
-
8/11/2019 Physical Design Arnab
27/49
27 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
KL AlgorithmKL Algorithm -- GainGain
gain( a,b ) = D( a ) + D( b ) - 2 d( a,b ), where d(a,b) = weight between a and b D(a ) = Out( a ) - In( a ) Out( a ) = total weight of all edges of a that cross the bisection In( a ) = total weight of all edges of a that do not cross the
bisection
-
8/11/2019 Physical Design Arnab
28/49
28 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
KL AlgorithmKL Algorithm -- ExampleExample
-
8/11/2019 Physical Design Arnab
29/49
29 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
KL AlgorithmKL Algorithm Complexity & DrawbacksComplexity & Drawbacks
ComplexityComplexity O(cnO(cn 33 ), n ), n is the no. of verticesis the no. of vertices ,, andand cc is no. ofis no. of
passespasses Initial computation ofInitial computation of DD ss O(nO(n ). ). Within a pass, computation of gain for all freeWithin a pass, computation of gain for all free
pairspairs O(nO(n 2 2 ). ).
No. of passes is usually small.No. of passes is usually small.DrawbacksDrawbacks
considers unit vertex weights onlyconsiders unit vertex weights only not applicable tonot applicable to hypergraphshypergraphs partition sizes have to be prepartition sizes have to be pre --specifiedspecified high time complexityhigh time complexity
-
8/11/2019 Physical Design Arnab
30/49
30 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Partitioning OutcomePartitioning Outcome
Output of Partitioning PhaseOutput of Partitioning Phase A set of blocksA set of blocks Area of each blockArea of each block Possible shapes of each blockPossible shapes of each block No. of terminals in each blockNo. of terminals in each block NetlistNetlist specifying the connections between blocksspecifying the connections between blocks
Fixed BlockFixed Block Layout of circuit within block is knownLayout of circuit within block is known hencehence
fixed dimension (shape).fixed dimension (shape).
Flexible BlockFlexible Block Exact dimensions not yet determinedExact dimensions not yet determined
-
8/11/2019 Physical Design Arnab
31/49
31 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
FloorplanningFloorplanning
Input to the floorplanning problem:Input to the floorplanning problem: A set of blocks, both fixed and flexible.A set of blocks, both fixed and flexible. Pin locations of fixed blocks.Pin locations of fixed blocks.
AA netlistnetlist ..
Requirements:Requirements: Find locations for each block so that no twoFind locations for each block so that no two
blocks overlap.blocks overlap. Determine shapes of flexible blocks.Determine shapes of flexible blocks.
Objectives:Objectives: Minimize area.Minimize area. Reduce netReduce net --length for critical nets.length for critical nets.
-
8/11/2019 Physical Design Arnab
32/49
32 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Pin AssignmentPin Assignment
Input to the pin assignment problem:Input to the pin assignment problem:1.1. A placement of blocks.A placement of blocks.
2.2. Number of pins on each block, possibly anNumber of pins on each block, possibly anordering.ordering.
3.3. AA netlistnetlist ..
Requirements:Requirements:1.1. To determine the pin locations on the blocks.To determine the pin locations on the blocks.
Objectives:Objectives:1.1. To minimize netTo minimize net --length.length.
-
8/11/2019 Physical Design Arnab
33/49
33 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
A Slicing FloorplanA Slicing Floorplan
IH
GFED
C
BA
V
H
VVV
V
HH
CB
EDIHGF A
-
8/11/2019 Physical Design Arnab
34/49
34 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
A NonA Non --Slicing FloorplanSlicing Floorplan
E
D
C
B
A
-
8/11/2019 Physical Design Arnab
35/49
35 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
A Hierarchical FloorplanA Hierarchical Floorplan
-
8/11/2019 Physical Design Arnab
36/49
36 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Floorplanning AlgorithmsFloorplanning Algorithms
Floorplanning Algorithms
Rectangular Dual-GraphApproach
HierarchicalApproach
SimulatedAnnealing
-
8/11/2019 Physical Design Arnab
37/49
37 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Rectangular DualRectangular Dual --Graph ApproachGraph Approach
Output of partitioning algorithms represented byOutput of partitioning algorithms represented bya graph.a graph.
Floorplans can be obtained by converting theFloorplans can be obtained by converting thegraph into its rectangular dual.graph into its rectangular dual.
The rectangular dual of a graph satisfies theThe rectangular dual of a graph satisfies thefollowing properties:following properties:
Each vertex corresponds to a distinctEach vertex corresponds to a distinctrectangle.rectangle.
For every edge, the corresponding rectanglesFor every edge, the corresponding rectanglesare adjacent.are adjacent.
-
8/11/2019 Physical Design Arnab
38/49
38 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Rectangular Floorplan & its Dual GraphRectangular Floorplan & its Dual GraphWithout loss of generality, weWithout loss of generality, weassume that a rectangularassume that a rectangularfloorplan contains no crossfloorplan contains no cross
junctions. junctions.
Under this assumption, theUnder this assumption, thedual graph of a rectangulardual graph of a rectangularfloorplan is afloorplan is a planarplanar
triangulated graph (PTG).triangulated graph (PTG).
543
21
543
21
-
8/11/2019 Physical Design Arnab
39/49
39 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
RectangularRectangular FloorplanFloorplan & its Dual Graph& its Dual Graph
Every dual graph of a rectangular floorplan (withoutEvery dual graph of a rectangular floorplan (withoutcross junction) is a PTG.cross junction) is a PTG.
However, not every PTG corresponds to a rectangularHowever, not every PTG corresponds to a rectangular
floorplan.floorplan.
4 3
21
32
Complextriangle
34
21
41
Replace by
-
8/11/2019 Physical Design Arnab
40/49
40 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
DrawbacksDrawbacks
A new approach to floorplanning, in which manyA new approach to floorplanning, in which manysubsub --problems are still unsolved.problems are still unsolved.The main problem concerns the existence of theThe main problem concerns the existence of therectangular dual, i.e. the elimination of complexrectangular dual, i.e. the elimination of complextriangles.triangles.
Select a minimum set E of edges such that eachSelect a minimum set E of edges such that eachcomplex triangle has at least one edge in E.complex triangle has at least one edge in E.
A vertex can be added to each edge of E toA vertex can be added to each edge of E toeliminate all complex triangles.eliminate all complex triangles.
The weighted complex triangle eliminationThe weighted complex triangle eliminationproblem has been shown to be NPproblem has been shown to be NP --complete.complete.
Some heuristics are available.Some heuristics are available.
h l h
-
8/11/2019 Physical Design Arnab
41/49
41 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical ApproachHierarchical Approach
Widely used approach to floorplanning.Widely used approach to floorplanning. Based on a divideBased on a divide --andand --conquer paradigm.conquer paradigm.
At each level of the hierarchy, only a small number ofAt each level of the hierarchy, only a small number ofrectangles are considered.rectangles are considered.
A small circuit C, ant all possible floorplans.A small circuit C, ant all possible floorplans.
After an optimal configuration for the three modules hasAfter an optimal configuration for the three modules hasbeen determined, they are merged into a larger module.been determined, they are merged into a larger module. The verticesThe vertices aa ,, bb ,, cc are merged into a super vertex atare merged into a super vertex at
the next levelthe next level
c
c b
a
b aa
a
c b
b
c
dC d
-
8/11/2019 Physical Design Arnab
42/49
42 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Contd.Contd.
The number of floorplans increases exponentiallyThe number of floorplans increases exponentiallywith the number of moduleswith the number of modules dd considered at eachconsidered at eachlevel.level.
dd is thus limited to a small number (typically d
-
8/11/2019 Physical Design Arnab
43/49
43 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical Approach :: BottomHierarchical Approach :: Bottom --UpUp
Hierarchical approach works best in bottomHierarchical approach works best in bottom --upupfashion.fashion.Modules are represented as vertices of a graph,Modules are represented as vertices of a graph,while edges represent connectivity.while edges represent connectivity.
Modules with high connectivity are clusteredModules with high connectivity are clustered
together.together. Number of modules in each clusterNumber of modules in each cluster d.d.
An optimal floorplan for each cluster isAn optimal floorplan for each cluster is
determined by exhaustive enumeration.determined by exhaustive enumeration. The cluster is merged into a larger module forThe cluster is merged into a larger module for
highhigh --level processing.level processing.
Hi hi l A h BHi hi l A h B tt UU
-
8/11/2019 Physical Design Arnab
44/49
44 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical Approach :: BottomHierarchical Approach :: Bottom --UpUp
A Greedy ProcedureA Greedy Procedure
Sort the edges in decreasing weights.Sort the edges in decreasing weights.
The heaviest edge is chosen, and the two modules ofThe heaviest edge is chosen, and the two modules ofthe edge are clustered in a greedy fashion.the edge are clustered in a greedy fashion.
Restriction: number of modules in each clusterRestriction: number of modules in each cluster d.d.
In the next higher level, vertices in a cluster areIn the next higher level, vertices in a cluster are
merged, and edge weights are summed upmerged, and edge weights are summed upaccordingly.accordingly.
Hi hi l A h B ttHierarchical Approach :: Bottom UUp
-
8/11/2019 Physical Design Arnab
45/49
45 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical Approach :: BottomHierarchical Approach :: Bottom --UpUp
ProblemProblem Some lightweight edges may be chosen at higherSome lightweight edges may be chosen at higher
levels in the hierarchy, resulting in adjacency oflevels in the hierarchy, resulting in adjacency oftwo clusters of highly incompatible areas.two clusters of highly incompatible areas.
Possible solutionPossible solution Arbitrarily assign a small cluster to a neighboringArbitrarily assign a small cluster to a neighboring
cluster when their sizes will be too small forcluster when their sizes will be too small forprocessing at a higher level of the hierarchy.processing at a higher level of the hierarchy.
Hierarchical Approach :: BottomHierarchical Approach :: Bottom --UpUp
-
8/11/2019 Physical Design Arnab
46/49
46 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical Approach :: BottomHierarchical Approach :: Bottom --UpUp
bb
b
aa
a
dd
d
cc
c
e
e
e
1
1010 3
3
32
Greedy clustering Merging small clusters
Estimating Cost of a FloorplanEstimating Cost of a Floorplan
-
8/11/2019 Physical Design Arnab
47/49
47 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Estimating Cost of a FloorplanEstimating Cost of a Floorplan
The cost of a floorplan is usually estimated from theThe cost of a floorplan is usually estimated from theconnections and the area of theconnections and the area of the floorplanfloorplan ..
The area can be easily estimated because theThe area can be easily estimated because thedimensions of each cluster can be passed up fromdimensions of each cluster can be passed up fromthe bottomthe bottom --up clustering.up clustering.
The area of a particular choice can thus beThe area of a particular choice can thus becomputed for each candidatecomputed for each candidate floorplanfloorplan ..
The cost can be estimated by summing up the edgeThe cost can be estimated by summing up the edgeweights multiplied by the distance between the centersweights multiplied by the distance between the centersof the clusters.of the clusters.
Hierarchical Approach :: TopHierarchical Approach :: Top --DownDown
-
8/11/2019 Physical Design Arnab
48/49
48 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP
Hierarchical Approach :: TopHierarchical Approach :: Top -DownDown
The fundamental step is the partitioning of modules.The fundamental step is the partitioning of modules. Each partition is assigned to a child floorplan.Each partition is assigned to a child floorplan. Partitioning is recursively applied to the childPartitioning is recursively applied to the child
floorplans.floorplans.Major issue here is to obtain balanced graphMajor issue here is to obtain balanced graphpartitioning.partitioning.
kk --way partitioning, in general.way partitioning, in general.Not very widely used due to the difficulty of obtainingNot very widely used due to the difficulty of obtainingbalanced partitions.balanced partitions.One can combine topOne can combine top --down and bottomdown and bottom --up approaches.up approaches.
Apply bottomApply bottom --up technique to obtain a set of clusters.up technique to obtain a set of clusters. Apply topApply top --down approach to these clusters.down approach to these clusters.
-
8/11/2019 Physical Design Arnab
49/49
49 Advanced VLSI Design Lab, IIT KGP Advanced VLSI Design Lab, IIT KGP