Periodic Motion. = Where ‘ ’ is called force constant ... · PDF filefundamental...
14
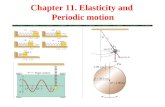
1 Periodic Motion: The motion which repeats itself after a regular interval of time is called Periodic Motion. UCM of a body is the simplest type of Periodic motion. Oscillatory motion: If a body in periodic motion moves along the same path to and fro about a definite point (mean position) then the motion of the body is oscillatory. e.g. Simple pendulum, mass attached to a spring and stretched. All oscillatory motion are periodic but all periodic motion are not oscillatory. All objects that oscillate have one thing in common, each subjected to restoring force. S.H.M. is the simplest and the most fundamental type of periodic motion S.H.M. is an oscillatory motion for which the graph between displacement from equilibrium position is a sine or cosine curve i.e. its displacement from mean position varies sinosidally or cosinosidally with time. If the motion is taking place under the action of restoring force in which the magnitude of force is directly proportional to displacement then such a motion is called linear simple harmonic motion. 2) Explanation of the mass oscillating at the end of the spring: Consider a spring with one end fixed and to the other end, a mass m is suspended. The spring gets stretched by length , so that the upward force due to the stretched spring is equal to weight mg. Mathematically, = Where ‘’ is called force constant of the spring or spring factor, is the extension spring due to mass. As all the net force on mass is zero the position is called mean position or equilibrium position. When the mass is further pulled down and released is performs to and fro motion about the mean position. When the mass is pulled down the spring is stretched and due to elastic property of spring it exerts a restoring force on the mass. This force is directly proportional to the displacement and directed towards mean position. When the mass is released the restoring force accelerates the mass towards the mean position. Due to inertia of motion, the mass moves beyond the mean position. Again the restoring force acts on the body which goes on increasing. The K.E. of the mass is used in doing work against the restoring force. When the spring is fully compressed, the mass has no K.E. and the restoring force reaches its maximum value. The mass moves towards the mean position, Thus, the motion is taking place under the action of restoring force and the magnitude of force is directly proportional to the displacement of mass from mean position. Hence this to and fro motion is linear S.H.M. A body performing linear S.H.M. satisfies the following conditions: 1) The force acting on the body is always directed towards mean position. 2) Magnitude of force is directly proportional to its displacement from mean position. Both the conditions can be expressed mathematically as: − = − Where k is the force constant
Transcript of Periodic Motion. = Where ‘ ’ is called force constant ... · PDF filefundamental...

1
Periodic Motion: The motion which repeats
itself after a regular interval of time is called
Periodic Motion.
UCM of a body is the simplest type of
Periodic motion.
Oscillatory motion: If a body in periodic
motion moves along the same path to and fro
about a definite point (mean position) then
the motion of the body is oscillatory.
e.g. Simple pendulum, mass attached to a
spring and stretched.
All oscillatory motion are periodic but
all periodic motion are not oscillatory.
All objects that oscillate have one thing
in common, each subjected to restoring
force.
S.H.M. is the simplest and the most
fundamental type of periodic motion S.H.M.
is an oscillatory motion for which the graph
between displacement from equilibrium
position is a sine or cosine curve i.e. its
displacement from mean position varies
sinosidally or cosinosidally with time.
If the motion is taking place under the action
of restoring force in which the magnitude of
force is directly proportional to displacement
then such a motion is called linear simple
harmonic motion.
2) Explanation of the mass oscillating at
the end of the spring:
Consider a spring
with one end fixed
and to the other
end, a mass m is
suspended. The
spring gets
stretched by length
𝑙, so that the
upward force due to the stretched spring is
equal to weight mg.
Mathematically,
𝑚𝑔 = 𝑘𝑙
Where ‘𝑘’ is called force constant of the
spring or spring factor, 𝑙 is the extension
spring due to mass.
As all the net force on mass is zero the
position is called mean position or
equilibrium position. When the mass is
further pulled down and released is performs
to and fro motion about the mean position.
When the mass is pulled down the spring is
stretched and due to elastic property of
spring it exerts a restoring force on the mass.
This force is directly proportional to the
displacement and directed towards mean
position. When the mass is released the
restoring force accelerates the mass towards
the mean position. Due to inertia of motion,
the mass moves beyond the mean position.
Again the restoring force acts on the body
which goes on increasing. The K.E. of the
mass is used in doing work against the
restoring force. When the spring is fully
compressed, the mass has no K.E. and the
restoring force reaches its maximum value.
The mass moves towards the mean position,
Thus, the motion is taking place under the
action of restoring force and the magnitude
of force is directly proportional to the
displacement of mass from mean position.
Hence this to and fro motion is linear
S.H.M.
A body performing linear S.H.M.
satisfies the following conditions:
1) The force acting on the body is always
directed towards mean position.
2) Magnitude of force is directly
proportional to its displacement from
mean position.
Both the conditions can be expressed
mathematically as:
𝐹 − 𝑥
𝐹 = −𝑘𝑥 Where k is the force constant

2
Hence force constant is the restoring
force per unit displacement.
S.I. unit of k N/m.
Graph between restoring force and
displacement is a straight line.
Definition of linear S.H.M. The periodic motion of a body along
a straight line in which the restoring force or
acceleration acting on the body is always
directed towards mean position and its
magnitude is directly proportional to the
displacement of the body from the mean
position.
Definitions: 1) Oscillation: The motion from O to B, B
to O, then O to A and back to O is called
one complete oscillation.
2) Amplitude (a): The maximum
displacement of the particle on either side
of mean position.
3) Time period or periodic time (T): The
time taken by the particle to complete
one oscillation.
4) Frequency (n or f): Number of
oscillations completed by the particle in
one second.
Differential equation of S.H.M. Consider a particle of mass m
performing linear SHM about the mean
position O in a straight line AB. Let at time
‘𝑡’ the particle have displacement 𝑥 from
position O. Let 𝛿𝑥 be small change in
displacement in a short time 𝛿𝑡.
𝑣 =
lim
0 t t
x
𝑣 =dt
dx
Let 𝛿𝑣 represent small change in velocity in
short time ‘𝛿𝑡’
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =lim
0 t t
v
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =dt
dv
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =
dt
dx
dt
d
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =2
2
dt
xd
Thus, 2
2
dt
xd represents acceleration of the
particle
From Newton’s law,
𝐹 = 𝑚𝑎𝑠𝑠. 𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛
= 𝑚.2
2
dt
xd
For a particle performing linear S.H.M.
𝐹 = −𝑘𝑥
Where, k force constant.
2
2
dt
xd = x
m
k.
2
2
dt
xd + x
m
k. = 0
Let, 2m
K
2
2
dt
xd + x2 = 0
EXPRESSION FOR DISPLACEMENT,
VELOCITY AND ACCELERATION OF
A PARTIOCLE PERFORMING
LINEAR S.H.M.
Expression for acceleration:
The differential equation of a particle
performing S.H.M. is given by,
2
2
dt
xd + x2 = 0
2
2
dt
xd = - x2 ----------- (1)
The above equation gives the
acceleration of the particle at any instant.
Negative sign indicates that acceleration and
displacement are oppositely directed.
Graph between acceleration and
displacement is straight line.
Expression for velocity

3
We have, 2
2
dt
xd = - x2 --------- (A)
But, 2
2
dt
xd =
dt
dv
=dx
dv
dt
dx
= 𝑣dx
dv
Substituting in (A)
𝑣dx
dv= − x2
𝑣𝑑𝑣 = − x2 𝑑𝑥
Integrating both sides.
dxxdvv .. 2
2
2v =
2
22 x + C ………..(B)
Where C constant of integration.
When the particle is at extreme position
𝑥 = 𝑎, 𝑣 = 0
0 =2
22a + 𝐶
𝐶 =2
22a
Substituting value of C in equation (B)
2
2v =
2
22 x +
2
22a
v2 = - x2 2 + 22a
= 222 xa
v = 22. xa
Graph between velocity and
displacement is an ellipse
Expression for displacement,
v = 22. xa
dt
dx =
22. xa
2
2 xa
dx
= dt
Integrating both sides,
2
2 xa
dx = . dt
Sin-1 (x/a) = t +
a
x = sin ( t + )
𝑥 = a sin ( t + )
Case I: When the particle starts from
mean position,
𝑡 = 0, 𝑥 = 0 0 = 𝑎 𝑠𝑖𝑛 (0 + ) 0 = 𝑠𝑖𝑛 𝑠𝑖𝑛 = 0 = 0 𝒙 = 𝒂 𝒔𝒊𝒏 ( 𝒕)
Case II: When the particle starts from
extreme position,
𝑡 = 0, 𝑥 = 𝑎 𝑎 = 𝑎 𝑠𝑖𝑛 ( . 0 + ) 1 = 𝑠𝑖𝑛 = /2 𝑥 = 𝑎 𝑠𝑖𝑛 ( 𝑡 + /2) 𝒙 = 𝒂 𝒄𝒐𝒔 𝒕
Maximum velocity and maximum
acceleration of a particle performing
S.H.M.
At mean position
𝒙 = 0
2
2
dt
xd = - x2
= − 2 . 0 𝑨𝒄𝒄𝒆𝒍𝒆𝒓𝒂𝒕𝒊𝒐𝒏 = 𝟎
𝑣 =22 xa
= 02 a
=2a
𝒗 = 𝒂 (𝒎𝒂𝒙)
At extreme position
𝑥 = 𝑎
td
xd2
2
= - x2
= − 2 . 𝑎 𝑨𝒄𝒄𝒆𝒍𝒆𝒓𝒂𝒕𝒊𝒐𝒏 =
2 𝑎 (𝑚𝑎𝑥)(𝐼𝑛 𝑚𝑎𝑔𝑛𝑖𝑡𝑢𝑑𝑒)
𝑣 = 22. xa
𝑣 = 22. aa
𝑣 = 0
a
a 2
velocitymaximum
onaccelerati maximum
=

4
TOTAL ENERGY OF A PARTICLE
PERFORMING S.H.M.:
Consider a particle mass ‘m’ performing
SHM about the mean position O along a
straight line AB. Let at time ‘t’ the particle
be at p having displacement ‘𝑥’ from mean
position and ‘a’ be the amplitude of the
particle
Expression for K. E.
𝐾. 𝐸. = 2
2
1mv
𝑣 =22. xa
𝐾. 𝐸. = 222
2
1xam
Thus, K.E. depends on ‘𝑥’ having
max. K.E. at mean position
𝐾. 𝐸. (𝑚𝑎𝑥) = 22
2
1am ------- (1)
As, 𝑘
𝑚= 𝜔2
∴ 𝑘 = 𝑚𝜔2
𝐾. 𝐸. = 22
2
1xak
𝐾. 𝐸. (𝑚𝑎𝑥) = 2
2
1ka
EXPRESSION FOR P.E.
It is the work done by an external agent
against the restoring force in taking the
particle from its mean position to a given
point on its path.
At position p, the restoring force acting
on particle is,
𝐹 = − 𝑘𝑥 This force is directed towards the mean
position. If the particle is displaced through a
small distance ‘𝑑𝑥’ against the direction of
force work done
𝑑𝑤 = −𝐹 . 𝑑𝑥
negative sign indicates that displacement is
opposite to direction of force, substituting
the value of 𝐹 = − 𝑘𝑥.
𝑑𝑤 = − (−𝑘𝑥) 𝑑𝑥 = 𝑘𝑥 𝑑𝑥
Total work done when the particle moves
from O to p
𝑊 = x
dx
0
= x
dxkx0
.
= x
dxxk
0
.
=
x
xk
0
2
2
= 2
2
1kx
This work done is the P. E. of the particle
𝑃. 𝐸. = 2
2
1kx
Substituting 𝑘 = 𝑚 2
𝑃. 𝐸. =2
1 𝑚 2 𝑥2
Thus, P. E. depends on ‘x’ having
maximum P.E. at extreme position
𝑃. 𝐸. (𝑚𝑎𝑥) = 22
2
1am ------- (2)
Expression for total energy:
𝑇. 𝐸. = 𝐾. 𝐸. +𝑃. 𝐸.
= 22222
2
1
2
1xmxam
= ][2
1 2222 xxam
𝑇. 𝐸 = 22
2
1am ------------ (3)
From (1), (2) & (3) it is observed that T.E. of
particle in S.H.M. is Constant.
Substituting = 2 f
𝑇. 𝐸. = 22242
1maf
𝑇. 𝐸. = 2222 amf
From above equation as there is no term
like x, T.E. is independent of the position
of the particle and its value 2π2m f2 a2 is

5
const. at any position, Hence T.E. of the
particle in S.H.M. is conserved.
Extra: If 2 π2m is kept constant and if ‘a’
and ‘f’ are allowed to vary
𝑇. 𝐸. 𝛼 𝑓2
𝑇. 𝐸. 𝛼 𝑎2
Conservation of energy in S.H.M.
(graphically) or Graphical representation of
K.E., P.E.,T.E of a particle performing
S.H.M. varying with displacement from
mean position.
We have already seen that T.E. is conserved
in S.H.M. we can arrive at the same result by
considering the variation of K.E., P.E. in
S.H.M. The parabola with its vertex at origin
represents P.E. of the particle. The inverted
parabola represents K.E. of the particle. The
line parallel to the displacement axis
represents the T.E. The Energy of the
particle continuously interchanges between
K.E. and P.E. but their sum at all times
remains constant.
At mean position
P.E. = 0 where as K.E. is maximum.
At extreme position
K.E. = 0 where as P.E. is maximum.
At any other position, it is partly kinetic
and partly potential
At mean position
𝐾. 𝐸 = 22
2
1am
𝑃. 𝐸. = 0
𝑇. 𝐸. = 𝐾. 𝐸. + 𝑃. 𝐸.
= 22
2
1am + 0
= 22
2
1am
At extreme position:
𝐾. 𝐸. = 0 𝑃. 𝐸. = 22
2
1am
𝑇. 𝐸. = 22
2
1am
At any other position
𝐾. 𝐸. = )(2
1 222 xam
𝑃. 𝐸. = 22
2
1xm
𝑇. 𝐸. = 𝐾. 𝐸. + 𝑃. 𝐸.
= )(2
1 2222 xxam
= 22
2
1am .
T.E. at mean position = T.E. at extreme
position = T.E. at any position
Thus, T.E. is conserved.
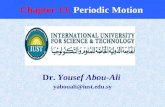
RELATIONSHIP BETWEEN UCM AND
S.H.M.: Consider a particle performing U.C.M. with
an angular velocity ‘ω’ along a circle of
radius a. Let AB be any diameter of the
circle Suppose that the particle M is the
projection of the particle P on diameter AB.
It is easy to see that as the particle p revolves
along the circle, the particle M moves to and
fro between the ends A and B. Thus the
particle P performs UCM and the particle M
performs SHM with amplitude a. The circle
drawn is called reference circle and the
particle P is called reference particle. When
P complete one revolution, its projection M
completes one oscillation.
Reference particle initially at P0 at time
t = 0. such that OXP0, After time t, at
tOPP 0 . Total angle described is
(ωt + α). At that instant particle performing
S.H.M. will be at M by drawing PM
perpendicular to AB.
In ∆OPM
𝑂𝑀 = 𝑂𝑃 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼) 𝑥 = 𝑎 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼)

6
This is the displacement of the particle M
at time t.
𝑣 = ) cos( tadt
dx
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛
= ) sin(2
2
2
tadt
xd
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 = x 2
xt sin a
As ‘ω’ is constant, above equation
shows that acceleration of the particle is
directly proportional to its displacement and
negative sign implies that acceleration is
directed opposite to displacement i.e.
directed towards mean position. Thus, the
particle M performing S.H.M. can be
considered geometrically linear S.H.M. as a
projection of a particle performing U.C.M.
EXPLANATION OF PHASE:
Phase is that quantity which gives the
position with direction of motion of the
particle.
Consider equation
𝑥 = 𝑎 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼)
The quantity (𝜔𝑡 + 𝛼) is called the
phase. It is the angle which enables us to
determine not only the displacement but also
direction of motion of the particle. The
constant α is called the initial phase (epoch
angle). It shows initially where the particle
starts from. If 𝛼 = 0, particle initially starts
from mean position and 𝛼 = 𝜋 /2, particle
initially starts from extreme position.
FIND ANALYTICALLY RESULTANT
AMPLITUDE AND EPOCH OF TWO
S.H.M. OF SAME PERIOD, DIFFERENT
AMPLITUDE AND DIFFERENT
INITIAL PHASES ALONG THE SAME
LINE.
Two S.H.M.s along x axis having same
period but different amplitude and different
initial phases can be written as,
𝑥1 = 𝑎1 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼1)
𝑥2 = 𝑎2 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼2)
Where a1 and a2 are their amplitudes and
α1 and α2 are their initial phase since the two
S.H.M. are along the same straight line, the
resultant displacement 𝑥 is equal to
algebraic sum of their displacement.
𝑋 = 𝑥1 + 𝑥2 X = 𝑎1 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼1)
+ 𝑎2 𝑠𝑖𝑛 (𝜔𝑡 + 𝛼2)
𝑋 = 1111 sin coscos sin atata
+ 2222 sin coscos sin atata
𝑋 = 2211 coscosa tsin a
2211 sinsin tcos aa
Let,
2211 coscos aa = R cos -------(1)
2211 sinsin aa = R sin --------(2)
𝑋 = 𝑅 t cossin cos t sin R 𝑋 = 𝑅 𝑠𝑖𝑛 t
Above equation shows that resultant
displacement is also S.H.M. having
amplitude 𝑅 and initial phase ‘𝛿’
To calculate Resultant amplitude R
Squaring and adding equation (1) and (2)
𝑅2𝑐𝑜𝑠2𝛿 + 𝑅2𝑠𝑖𝑛2𝛿= (𝑎1𝑐𝑜𝑠𝛼1 + 𝑎2𝑐𝑜𝑠𝛼2)2
+ (𝑎1𝑠𝑖𝑛𝛼1 + 𝑎2𝑠𝑖𝑛𝛼2 )2
= 2
22
21
22
1 coscos aa +
2121 coscos2 aa
+ 2
22
21
22
1 sinsin aa
+ 2121 sinsin2 aa
R2 (sin2 + cos2 ) =
)cos(sin 1
2
1
22
1 a +
)cos(sin 2
2
2
22
2 a +
)sinsincos(cos2 212121 aa
R2 = )cos(2 2121
2
2
2
1 aaaa
R = )cos(2 2121
2
2
2
1 aaaa
To Calculate Resultant Phase 𝛿 . Dividing equation (2) by (1),
2211
2211
coscos
sinsin
cos
sin
aa
aa
R
R
tan =2211
2211
coscos
sinsin
aa
aa

7
=
2211
22111
coscos
sinsintan
aa
aa
Case I: If the phase difference between
them is zero i.e. if the two S.H.M. are
in phase
1 =2 or
1 -2 = 0
𝒄𝑜𝑠(1 − 2 ) = 1
𝑅 = 1.2 21
2
2
2
1 aaaa
𝑅 = 2
21 )( aa
𝑅 = 𝑎1 + 𝑎2 Special case : If a1 = a2 = a
𝑅 = 𝑎 + 𝑎 𝑅 = 2𝑎
Case II: If the phase difference between
them is 𝝅
𝟐
1 - 2 = 𝝅
𝟐
Cos ( 1 - 2 ) = 0
𝑅 = 0..2 21
2
2
2
1 aaaa
𝑅 = 2
2
2
1 aa
Special case : If a1 = a2 = a
𝑅 =22 aa
𝑅 =22a
𝑅 = 𝑎 2 Case III: If the phase difference between
them is π i.e. if the two S.H.M. are
opposite in phase
21
𝑐𝑜𝑠 21 = −1
𝑅 = 12 21
2
2
2
1 aaaa
𝑅 = 21
2
2
2
1 2 aaaa
𝑅 = 2
21 aa
𝑅 = 𝑎1 – 𝑎2 Special case
If a1 = a2 = a
𝑅 = 𝑎 – 𝑎 𝑅 = 0 RELATION BETWEEN TIME PERIOD
AND ANGULAR VELOCITY AND TO
DERIVE THE EXPRESSION FOR
PERIOD AND FREQUENCY OF S.H.M.
The general expression for displacement
at time t is given by.
𝑥 = 𝑎 𝑠𝑖𝑛 t
Let 𝑥1 be the displacement of the particle at
time
2t
𝑥1 = 𝑎 𝑠𝑖𝑛
2t
= 𝑎 𝑠𝑖𝑛 2 t
= 𝑎 𝑠𝑖𝑛 t
= 𝑎 𝑠𝑖𝑛 t
𝑥1 = 𝑥 Thus, the displacement of the particle at time
t and
2t are same.
It can be shown that the direction of
displacement are same since, the position
and direction repeats after time /2
𝑇 =
2
𝜔2 =𝑘
𝑚
=m
k
Substituting = mk /
𝑇 =
m
k
2
𝑇 =k
m2
𝑛 =T
1
𝑛 =m
k
2
1
PHYSICAL SIGNIGICANCE OF
CONSTANT :
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 = − 𝜔2𝑥 magnitude of acceleration = 2 𝑥
2 =ntdisplaceme
onaccelerati of mag
=ntdisplaceme
onaccelerati of magnitude
= tdisplacemnunit /onaccelerati of mag
T =
2
T=
ntdisplacemeunit on / accelerati of magnitude
2

8
SIMPLE PENDULUM:
Simple pendulum is defined as a heavy
point mass suspended by weightless
inextensible tortionsless string from a rigid
support. In practice, we can’t have a heavy
point mass and nor we have a weightless
inextensible tortionsless string. Hence, in a
practical simple pendulum in place of heavy
point mass a small metallic sphere is used
known as bob in place of weightless,
inextensible string, a light thread is used.
The point from which the pendulum
is suspended is called the point of
suspension. As the string is very fine, the c.g.
of the pendulum coincides with centre of
mass of the bob known as the point of
oscillation. The distance between the point of
suspension and the point of oscillation is
called the length of the simple pendulum,
denoted as ‘l’.
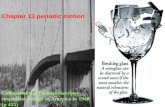
TO SHOW THE MOTION OF THE BOB
FOR SMALL ANGULAR
DISPLACEMENT IS IN S.H.M. AND
HENCE CALCULATE TIMEPERIOD:-
Consider a
simple
pendulum of
length ‘l’ and
‘m’ be the mass
of the bob. The
mean position
is its vertical
position, So. If
it is displaced
through small
angle in a
vertical plane
and released it
begins to oscillate about the mean
position O. Let be the small angular
displacement when the bob is at A at a
distance ‘x’ from O. At position A force
acting on the bob-
1) Weight mg vertically downwards.
2) Tension ‘T’ in the string.
Resolving mg into two rectangular
components mg cos along OA
produced, mg sin perpendicular to OA.
‘mg cos ’ is balanced by part of the
tension T, and the remaining part of the
tension provides the centripetal force is
magnitude mv2/l. mg sin which is
unbalanced tends to restore the bob to the
mean position and hence the bob performs to
and fro motion about the mean position.
Therefore, 𝐹 = − 𝑚𝑔 𝑠𝑖𝑛
Negative sign because F is opposite to
angular displacement.
For small angles 𝑠𝑖𝑛 =
1
sin0
lim
𝐹 = − 𝑚𝑔
𝐹 = − 𝑚𝑔 l
x
m
F= − g
l
x
i.e. acceleration = xl
g.
---------(1)
At a given place g is constant and for a
pendulum of given length l is constant
𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 − 𝑥
And negative sign indicates that acceleration
and displacement are oppositely directed.
The motion of the bob is in S.H.M.
EXPRESION FOR TIME PERIOD: From equation (1),
Magnitude of acceleration / unit
displacement = l
g
𝑇 =
2
T =
𝑇 =lg /
2
𝑇 =g
l2
Graph between l and T2 is a straight line.
From above equation time period is
1) independent of the mass of the bob
2) amplitude of oscillation
𝑛 =T
1
ntdisplacemeunit on / accelerati of magnitude
2

9
𝑛 = gl /2
1
𝑛 =l
g
2
1
ASSUMPTIONS MADE IN THE
DERIVATION OF THE TIME PERIOD:
1) support perfectly rigid
2) string is weightless & inextensible.
3) Resistance and buoyancy of air is
neglected
4) Bob having small angular displacement
hence the motion of the bob is almost linear
CONDITIONS UNDER WHICH THE
MOTION IS S.H.M.
1) Bob having small angular displacement
2) Oscillation of the simple pendulum is in
the same vertical plane.
3) Negligible air resistance.
DIFFERENCE BETWEEN IDEAL
SIMPLE AND PRACTICAL SIMPLE
PENDULUM
LAW’S OF SIMPLE PENDULUM:
1) Law of length: At a given place, period
of simple pendulum is directly
proportional to the square root of the
length of simple pendulum.
𝑇 l when, 𝑔 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡.
2) Law of acceleration: For a given length
of simple pendulum, the period of simple
pendulum is inversely proportional to the
square root of acceleration due to gravity.
𝑇g
1 when, 𝑙 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡.
3) Law of mass: The period of the
simple pendulum is independent of mass
of the bob.
4) Law of isochronisms: The period of
simple pendulum is independent of the
amplitude of the bob. This is called
isochronisms and the oscillations of
simple pendulum are said to be
isochronous.
SECOND’S PENDULUM:
A second’s pendulum is a simple
pendulum whose time period is 2 sec
i.e. T = 2 sec.
Expression for length of second’s
pendulum:
We have,
𝑇 =g
l2
For a second’s pendulum T = 2 sec.
2 =g
l2
1 =g
l
Squaring both sides,
1 =g
l2
𝑙 =2
g
GRAPHICAL REPRESENTATION OF
DISPLACEMENT, VELOCITY AND
ACCELERATION OF A BODY
STARTING FROM MEAN POSITION:
For a particle starting from mean
position,
The equation for displacement, velocity
and acceleration are given by
𝑥 = 𝑎 𝑠𝑖𝑛 t
𝑣 = tdt
dx cos a
𝐴𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =dt
dv
= −𝑎 2 𝑠𝑖𝑛 𝑡
Ideal simple
pendulum
Practical simple
pendulum
1) Heavy point
mass is used
2) String
weightless,
3) Resistance of air
is neglected and
hence amplitude is
constant
1) Heavy metallic
sphere known as
bob is used
2) Light thread is
used
3) Due to resistance
amplitude goes on,
decreasing
exponentially with
time.

10
1) Displacement graph:
Following table gives the values of
displacement for certain values of time
having these value displacement graph is
plotted which represents the variation of
displacement x with variation of time t.
2) Velocity graph:
Following table gives the values of velocity
for certain values of time having these values
velocity graph is plotted which represents
variation of velocity with variation of time t.
3) Acceleration graph:
Following table gives value of acceleration
for certain values of time having these values
acceleration graph is plotted which gives, the
variation of acceleration with variation of
time.
Conclusions from graph.
1) They vary harmonically with time.
2) When displacement is maximum velocity
is zero hence there is a phase difference
of 𝜋
2 between them.
3) When displacement has maximum
positive value of acceleration has
maximum negative value. Hence there is
a phase difference of 𝜋 between them.
For a particle starting from extreme
position, the equation of displacement,
velocity and acceleration are given by
𝑥 = 𝑎 𝑐𝑜𝑠 𝑡
𝑣 = dt
dx= −𝑎 𝑠𝑖𝑛 𝑡.
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 =2
2
dt
xd
𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛 = −𝑎𝜔2𝑐𝑜𝑠𝜔𝑡
1) Displacement graph:
Following table gives the values of
displacement for certain values of time using
these values, displacement graph is plotted
which represents the variation of displacement
𝑥 with variation of time 𝑡.
t t x
0 0 0
T/4 /2 a
T/2 0
3T/4 3 /2 -a
T 2 0
t t v
0 0 a
T/4 /2 0
T/2 -a
3T/4 3 /2 0
T 2 a
T t accn
0 0 0
T/4 /2 -a 2
T/2 0
3T/4 3 /2 a 2
T 2 0

11
2) Velocity graph:
Following table gives the values of velocity
for certain values of time. Using these values
velocity graph is plotted which represented
the variation of velocity v with variation of
time t.
3) Acceleration graph:
Following table gives values of acceleration
for certain values of time, using these values
acceleration graph is plotted which
represents, the variation of displacement x
with variation of time t.
DAMPED SIMPLE HARMONIC
MOTION
We know that the motion of a simple
pendulum, swinging in air, dies out
eventually. This is because the air drag and
the friction at the support oppose the motion
of the pendulum and dissipate its energy
gradually. The pendulum is said to execute
damped oscillations. In damped oscillations
although the energy of the system is
continuously dissipated, the oscillations
remain apparently periodic. The dissipating
forces are generally the frictional forces. To
understand the effect of such external forces
on the motion of an oscillator, let us consider
a system as shown in Fig.
Here a block of mass m oscillates vertically
on a spring with spring constant k. The block
is connected to a vane through a rod (the
vane and the rod are considered to be
massless). The vane is submerged in a liquid.
As the block oscillates up and down, the
vane also moves along with it in the liquid.
The up and down motion of the vane
displaces the liquid, which in turn, exerts an
inhibiting drag force (viscous drag) on it and
thus on the entire oscillating system. With
time, the mechanical energy of the block
spring system decreases, as energy is
transferred to the thermal energy of the
liquid and vane.
Let the damping force exerted by the
liquid on the system be Fd. Its magnitude is
t t x
0 0 a
T/4 /2 0
T/2 -a
3T/4 3 /2 0
T 2 a
T t v
0 0 0
T/4 /2 -a
T/2 0
3T/4 3 /2 a
T 2 0
T t accn
0 0 - a 2
T/4 /2 0
T/2 a
3T/4 3 /2 0
T 2 - a 2

12
proportional to the velocity v of the vane or
the block. The force acts in a direction
opposite to the direction of v. This
assumption is valid only when the vane
moves slowly. Then for the motion along the
x-axis (vertical direction as shown in Fig).
we have
𝐹𝑑 = – 𝑏 𝑣 where b is a damping constant that depends
on the characteristics of the liquid and the
vane. The negative sign makes it clear that
the force is opposite to the velocity at every
moment. When the mass m is attached to the
spring and released, the spring will elongate
a little and the mass will settle at some
height. This position, shown by O in Fig , is
the equilibrium position of the mass. If the
mass is pulled down or pushed up a little, the
restoring force on the block due to the spring
is
𝐹𝑠 = – 𝑘𝑥
where 𝑥 is the displacement of the mass
from its equilibrium position. Thus the total
force acting on the mass at any time t is
𝐹 = 𝐹𝑑 + 𝐹𝑠
𝑚𝑎 = – 𝑘 𝑥 – 𝑏 𝑣
𝑚𝑎 + 𝑘 𝑥 + 𝑏 𝑣 = 0
𝑚𝑑2𝑥
𝑑𝑡2+ 𝑏
𝑑𝑥
𝑑𝑡+ 𝑘𝑥 = 0
The solution of above equation describes the
motion of the block under the influence of a
damping force which is proportional to
velocity.
The solution is found to be of the form
𝑥 = 𝐴𝑒−𝑏𝑡 2𝑚⁄ cos (𝜔′𝑡 + 𝜑)
amplitude, which is 𝐴𝑒−𝑏𝑡 2𝑚⁄ gradually
decreases with time as shown in
displacement – time graph.
The expression cos (𝜔′𝑡 + 𝜑) shows
that motion is still periodic and S.H.M.
The period of oscillation is given as,
𝑇 =2𝜋
√ 𝑘𝑚 − (
𝑏2𝑚)
2
The period of oscillation increases due to
presence of term − (𝑏
2𝑚)
2
in the denominator.
Thus damping increases the period and
decreases amplitude.
NUMERICALS
Type I : Composition of two simple
harmonic motion of same period and
different amplitude and initial phase.
1. Two parallel simple harmonic motions
are given by
X1 = 20 sin 8 t ,X2 = 10 sin (8 t + 6
)
Find resultant amplitude and initial phase
of resultant simple harmonic motion.
2. Equation of simple harmonic motion is
x = 3 sin ( 5 t) + 4 cos (5 t)
Find amplitude and phase constant of the
motion.
3. Equation of simple harmonic motion is
x = 5sin (10 t + /2)
Find initial phase angle, period,
amplitude and frequency.
4. The displacement of particle in simple
harmonic motion is given by
x = a sin (ωt) + b cos (ωt) in metre,
where, a, b and ω are constant show that
motion is simple harmonic
If a = 3 cm b = 4 cm ω = 2 rad/sec.
Find period, maximum velocity and
maximum acceleration
5. Displacement of particle performing
SHM along the x-axis is given by
x = 4 sin ( t + /3) Find :
i) displacement ii) velocity
iii) Acceleration iv) Frequency
at t = 1 sec.
6. Displacement of particle performing
SHM is given by
x = 8 sin (5 t + /6)
Where time is in sec. and displacement in
metre. Calculate
i) Displacement
ii)Velocity
iii) Acceleration of a

13
Particle at t = 2 sec.
Type II :
7. A particle performs SHM of amplitude
10 cm at what displacement kinetic
energy of particle performing SHM is
two times its potential energy.
8. A body performing linear SHM has
amplitude 5 cm. Find the ratio of its P.E.
to K.E. When its displacement is 3 cm
from mean position.
9. Total energy of particle of mass 0.5 kg
performing SHM is 25 J. What is its
speed when crossing the centre of path.
10. Particle performing linear simple
harmonic motion of amplitude a. What
fraction of total energy is kinetic, when
displacement of half of amplitude.
Type III :
11. Find the change in length of seconds
pendulum if acceleration due to gravity
changes from 9.65 m/s2 to 9.8 m/s2.
12. Period of simple pendulum is double
when its length is increased by 1.2 m.
Calculate the original period.
13. A period of simple pendulum is found to
change by 40%, when the length of
simple pendulum increases by 0.5 m.
Calculate initial length, initial period of
oscillation at a place where g = 9.8
m/sec2.
14. Period of simple pendulum is found to
increase by 50% when length of the
simple pendulum increases
by 0.6 m. Calculate initial length and
initial period of oscillation.
15. Find maximum velocity of second’s
pendulum if the amplitude of oscillation of
pendulum is 0.15 m.
16. A clock regulated by second’s pendulum
keeps correct time. During summer, length
of the pendulum increases to 1.01m. How
much will the clock gain or lose in one day.
Given g = 9.8 m/sec2
17. A simple pendulum performs 50
oscillations in 3 min at a place A. It requires
same time for 49 oscillation at another place
B compare the value of gravitational
acceleration at A and B.
Type IV:
18. Bar magnet is vibrating in uniform
magnetic field of induction B about an
axis passing through its centre when the
value of B is reduced by 3 10-5 wb/m2.
The period of vibrating magnet is
doubled. Find the value of B.
19. A bar magnet of magnetic moment
7.9Am2 having moment of inertia 10-6
Kgm2. About the transverse axis passing
through its centre performing SHM in the
magnetic induction 3.6 10-5 wb/m2.
How many Oscillation does its performs
in one min.
20. A bar magnet freely suspended in
magnetic induction H makes 60
oscillation in one min. When another
magnet X is brought near to it no. of
oscillation are found to be 30\ min. What
is the induction of magnet X in term of
H, where H > X.
21. Two bar magnets are tied together side
by side and suspended so as to oscillates
about their centre of gravity in horizontal
plane compare their magnetic dipole
moment when one magnet is reversed.
Period of oscillation are 4 sec and 12 sec.
Type V :
22. Particle performing SHM has maximum
velocity 0.21 m/sec. and maximum
acceleration is 0.84 m/sec2. Find
amplitude and period of oscillation.
23. Maximum velocity of particle performing
SHM is 0.16 m/sec. If its maximum
acceleration is 0.64 m/sec2. Calculate
period and amplitude.
24. Calculate period and amplitude of a
particle performing SHM if its maximum
velocity is 32 cm/sec and maximum
acceleration 256 cm/sec2.
25. Maximum velocity of particle performing
SHM is 6.28 m/sec if length of its path is
8 cm. Calculate period.
26. Find the value of displacement of a
particle in SHM when its velocity is half
of the maximum velocity.
27. Particle is performing linear simple
harmonic motion. It’s velocity is 4
cm/sec. when it is at a distance of 3 cm
from mean position and 3 cm/sec when it

14
is at a distance of 4 cm from mean
position. Find the amplitude and period
of simple harmonic motion.
28. Particle executing simple harmonic
motion has velocities V1 and V2 when at
a distances X1 and X2 from the centre of
path. Show that its time period T is given
by
2
22
1
21
222
VV
xxT
29. Particle performing simple harmonic
motion has acceleration of 100 cm/sec2.
When it is at a distance of 25 cm from
mean position. Find its period?
30. Verticle light spring is stretched by 5 cm,
when a body of mass 5 kg is attached to
its free end. The body is further pull
down by 3 cm and released. Find
i) Period ii) Amplitude iii) Frequency
iv)Total energy
v) Velocity at mean position.
31. A body of mass 100 kg is suspended
from rigid support and performs simple
harmonic motion in the vertical direction
if force constant of the spring is 4.9
103 dynes/cm. Find frequency of SHM.
32. Period time of vibration of mass m1
Suspended from light spring is T sec.
When mass m2 is added to first mass and
system is made to vibrate, periodic time
is 2T sec. Compare masses m1 and m2.
33. A particle in SHM has velocity 0.4 m/sec
When it crosses the mean position. Find
its velocity when it is midway between
mean and extreme position.
34. A needle of swing machine moves in a
path of amplitude 2 cm and has
frequency 10 Hz with simple harmonic
motion. Find its acceleration at 40
1th
second after it has crossed mean position.
35. A sewing machine needle moves in a
path of length 0.06 m makes 20
oscillation in one sec. Find its
Acceleration after 120
1 sec after it has
cross mean position.
36. Particle of mass 10 gm performs linear
simple harmonic motion of amplitude 5
cm with period 2 sec. Find its potential
energy, kinetic energy at
6
1th second after it has crossed mean
position.
37. Differential equation for linear simple
harmonic motion of a particle of mass 2 g
is
0162
2
xdt
xd Find force constant
38. A body of mass 2 kg performs linear
simple harmonic motion. The restoring
force acting on it when displacement is
0.6 m from mean position in 3 N. write
down differential equation of its motion.
39. For a particle performing linear simple
harmonic motion show that average
peed over one oscillation is
Aw2 where
A is amplitude of simple harmonic
motion.
*********************************
SPACE FOR EXTRA POINTS