
Pedestrian dynamics: Experiment and Simulation
85
Pedestrian dynamics: Experiment and Simulation 22 October 2015 | Dr. Maik Boltes Forschungszentrum Jülich, Germany
Transcript of Pedestrian dynamics: Experiment and Simulation
Pedestriandynamics:ExperimentandSimulation22October 2015|Dr.MaikBoltes
ForschungszentrumJülich,Germany
DivisionCivil Securityand Traffic§ ForschungszentrumJülich(ResearchCentre)Researchonenergyandenvironment,informationandbrain~5500staff member
§ Institut„JülichSupercomputing Centre“(JSC)Operatingsupercomputerofthehighestperformanceclass;simulatingcomplexproblems~200staff member
§ Division„Civil Securityand Traffic“18staff member (including 5Ph.D.students,3graduate students)http://www.fzj.de/ias/jsc/cst

3
DivisionCivil Securityand Traffic§ Interdisciplinaryteamfocusingonmodelsandsimulationsofcomplexsystemswithapplicationsincivilsecurityandtrafficplanning
Pedestrian Dynamics,Experiments and AnalysisPerforming experiments forquantitative description of pedestrian dynamics
Pedestrian Dynamics andTraffic SimulationModelling of pedestrian dynamics, large scale evacuation, intermodal transport and mixed traffic
Fire SimulationModelling of fire and smoke spread in buildings or in common carriers using CFD methods
Overview
§ Motivation§ Laboratoryexperiments§ Automaticextractionoftrajectories§ Analysisresultsbyexample
§ Simulation§ Validationandverification§ Openaccess
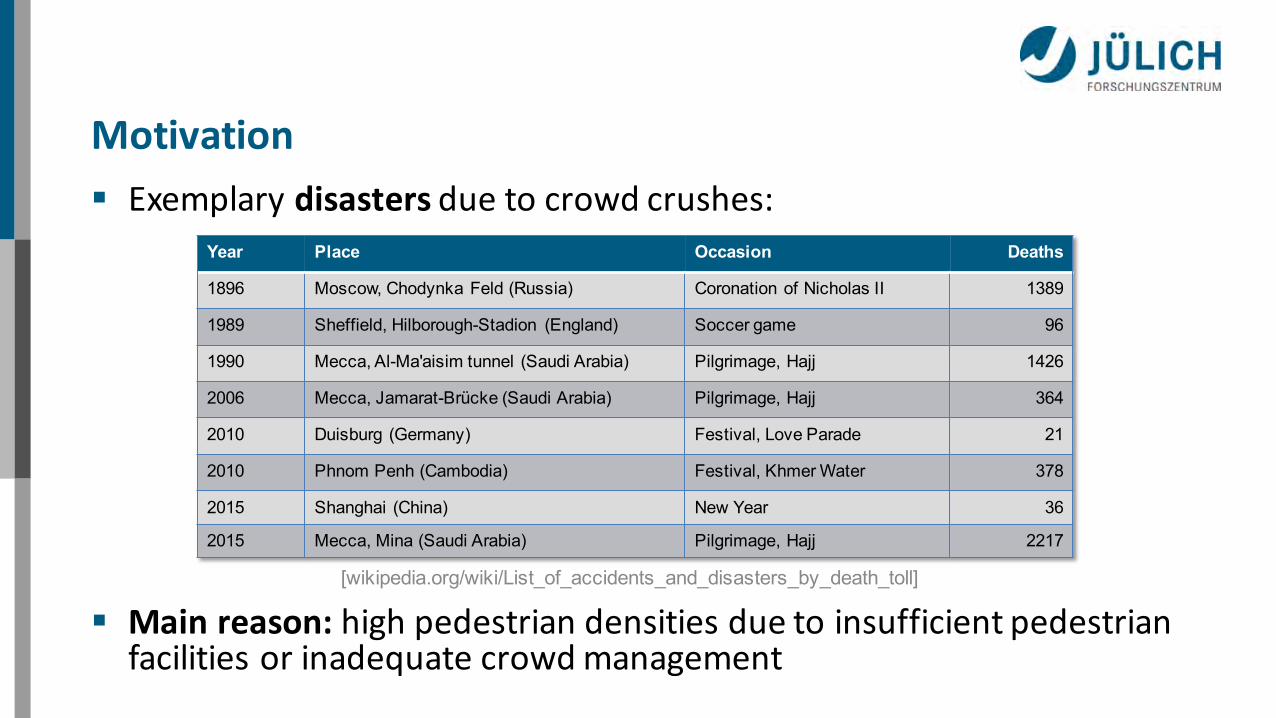
Motivation§ Exemplarydisasters duetocrowdcrushes:
§ Mainreason:highpedestriandensitiesduetoinsufficientpedestrianfacilitiesorinadequatecrowdmanagement
Year Place Occasion Deaths
1896 Moscow, Chodynka Feld (Russia) Coronation of Nicholas II 1389
1989 Sheffield, Hilborough-Stadion (England) Soccer game 96
1990 Mecca, Al-Ma'aisim tunnel (Saudi Arabia) Pilgrimage, Hajj 1426
2006 Mecca, Jamarat-Brücke (Saudi Arabia) Pilgrimage, Hajj 364
2010 Duisburg (Germany) Festival, Love Parade 21
2010 Phnom Penh (Cambodia) Festival, Khmer Water 378
2015 Shanghai (China) New Year 36
2015 Mecca, Mina (Saudi Arabia) Pilgrimage, Hajj 2217
[wikipedia.org/wiki/List_of_accidents_and_disasters_by_death_toll]

Motivation§ Exemplarydisasters duetocrowdcrushes:
§ Mainreason:highpedestriandensitiesduetoinsufficientpedestrianfacilitiesorinadequatecrowdmanagement

Motivation§ Aims:Increaseof
§ Safety,e.g.Designofescaperoutes(stadiums,theaters,schools,…)
§ Comfort,e.g.Designoftransportinfrastructures(stations,airports,trains,…)
§ Toolsandmethods:§ Legalregulations(prescriptivemethod)§ Guidelinesandhandbooks(macroscopicmodels)§ Computersimulations(microscopicmodels)
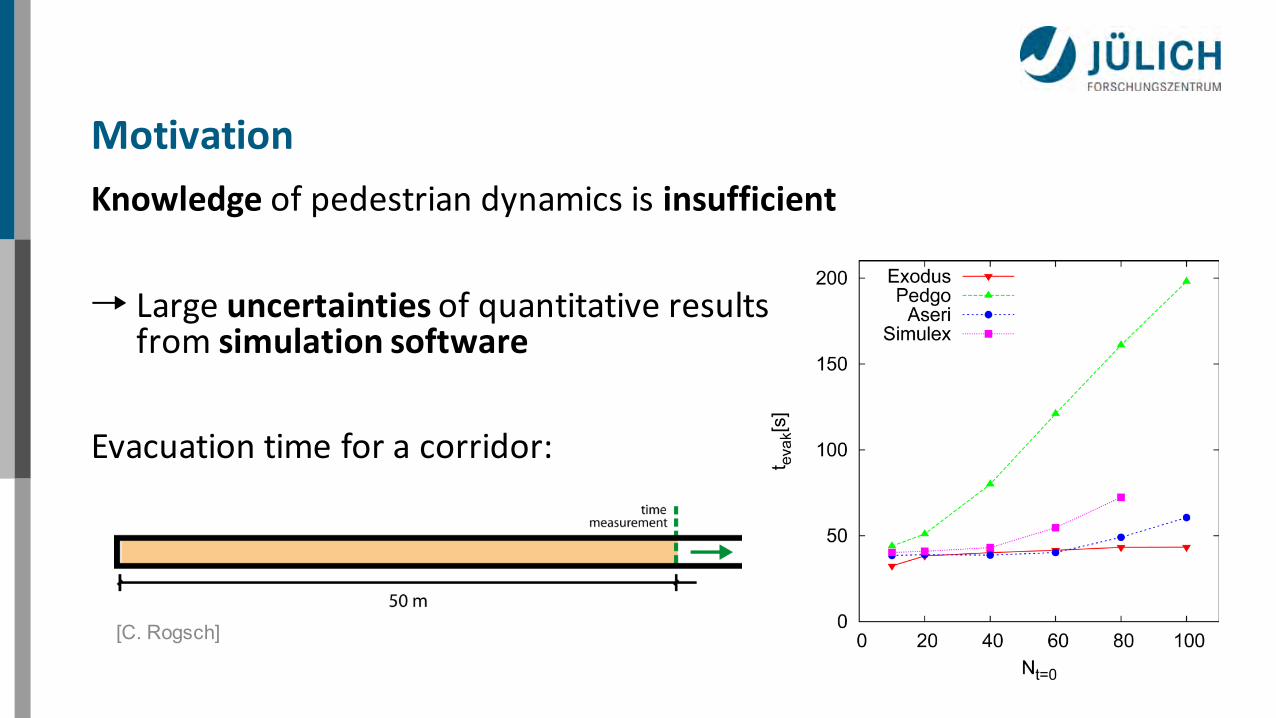
MotivationKnowledgeofpedestriandynamicsisinsufficient
→ Largeuncertainties ofquantitativeresultsfromsimulationsoftware
Evacuationtimeforacorridor:
[C. Rogsch]
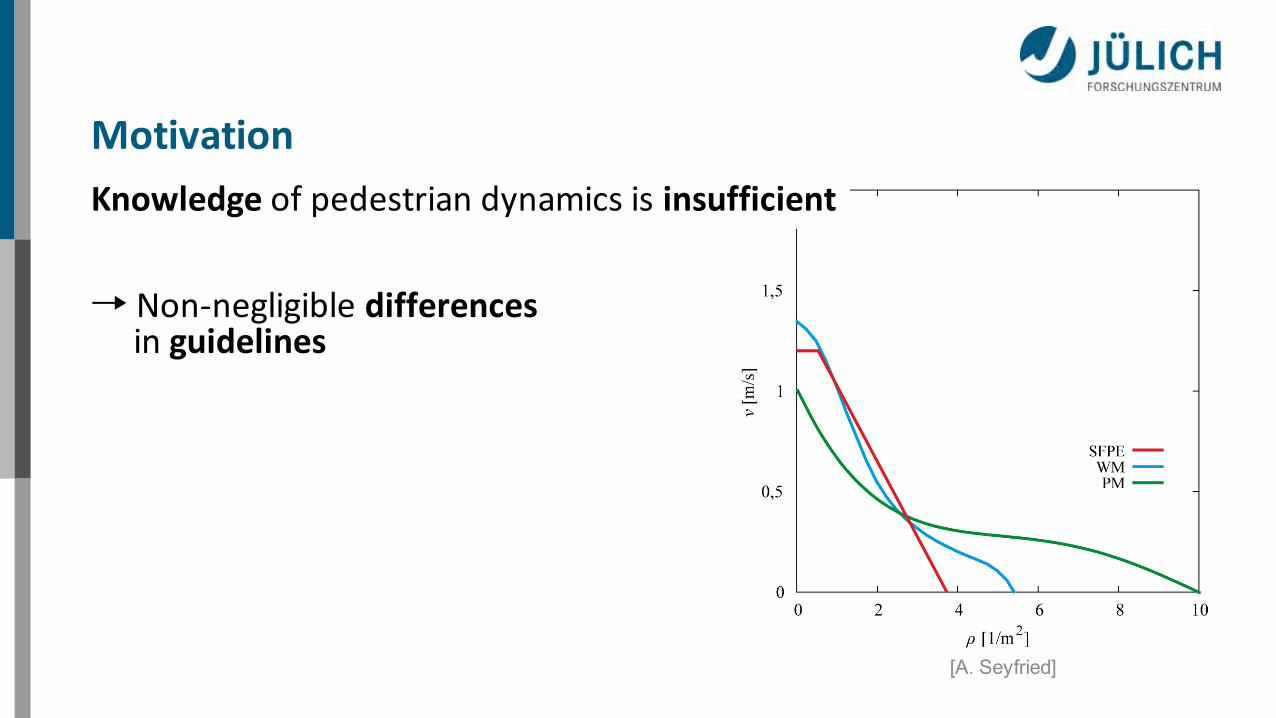
MotivationKnowledgeofpedestriandynamicsisinsufficient
→ Non-negligibledifferencesinguidelines
[A. Seyfried]
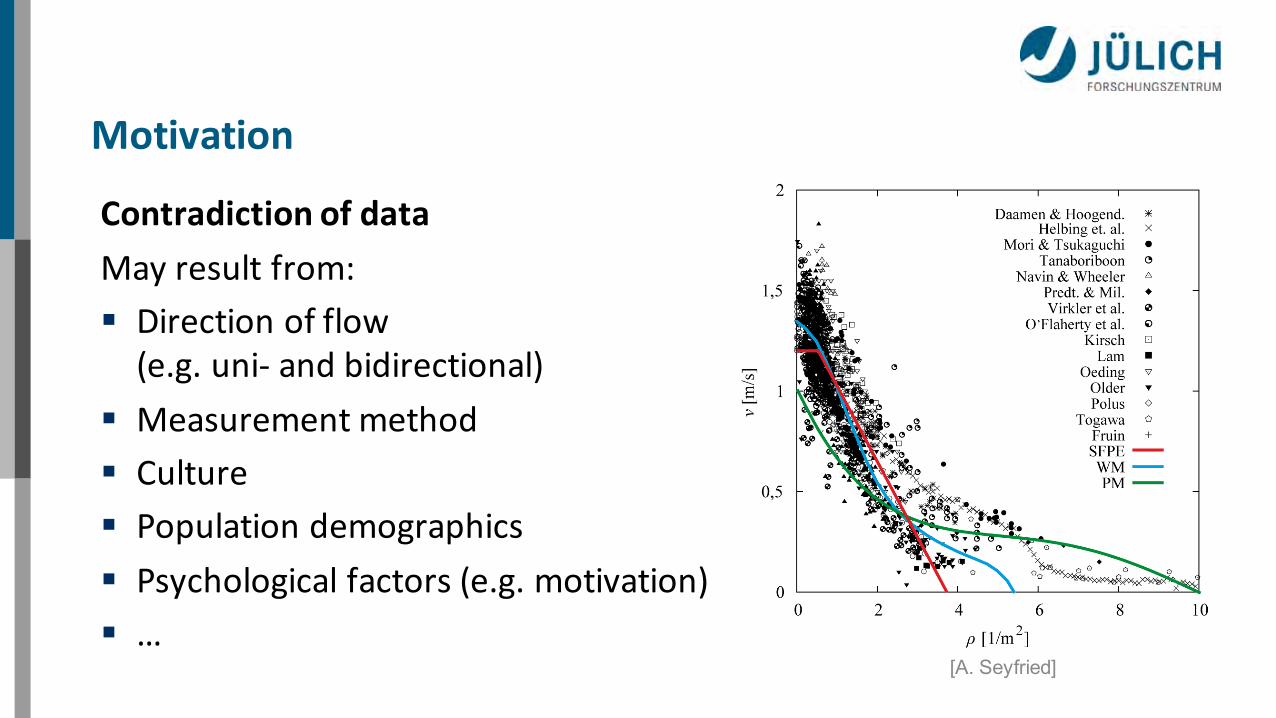
ContradictionofdataMayresultfrom:§ Directionofflow(e.g.uni- andbidirectional)
§ Measurementmethod§ Culture§ Populationdemographics§ Psychologicalfactors(e.g.motivation)§ …
[A. Seyfried]
Motivation

Reliableempiricaldata ofpedestrianmovementarenecessary
→analyze pedestriandynamicsfor
→modeldesign→modelcalibration→modelvalidation
Microscopicmodelsneedmicroscopicdata[M. Chraibi][A. Portz]
Motivation

Laboratoryexperiments

LaboratoryexperimentsYear Place #Pers. #Runs Extraction Marker
2005 G– Jülich 34 6 manually
2005 G– Jülich 60 18 semi-automatically
2006 G– Düsseldorf 200 99 automatically
2008 India 64 6 manually
2008 G– Wuppertal 50 14 semi-automatically
2009 G– Düsseldorf 350 170 automatically
2012 G– Wuppertal 33 10 automatically
2013 Japan 28 260 automatically
2013 G– Düsseldorf 926 190 automatically2014&2015 G– Wuppertal 51 132 automatically
2015 Australia 200 110 automatically
2015 China 71 36 automatically
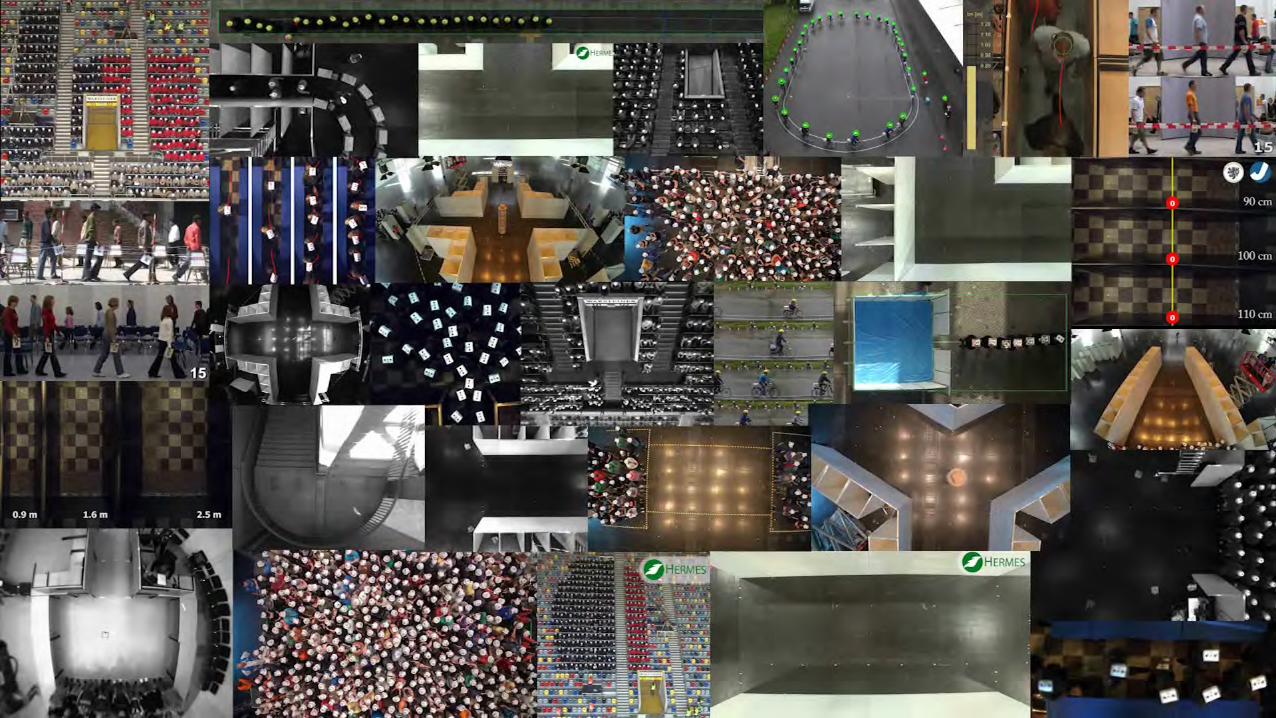

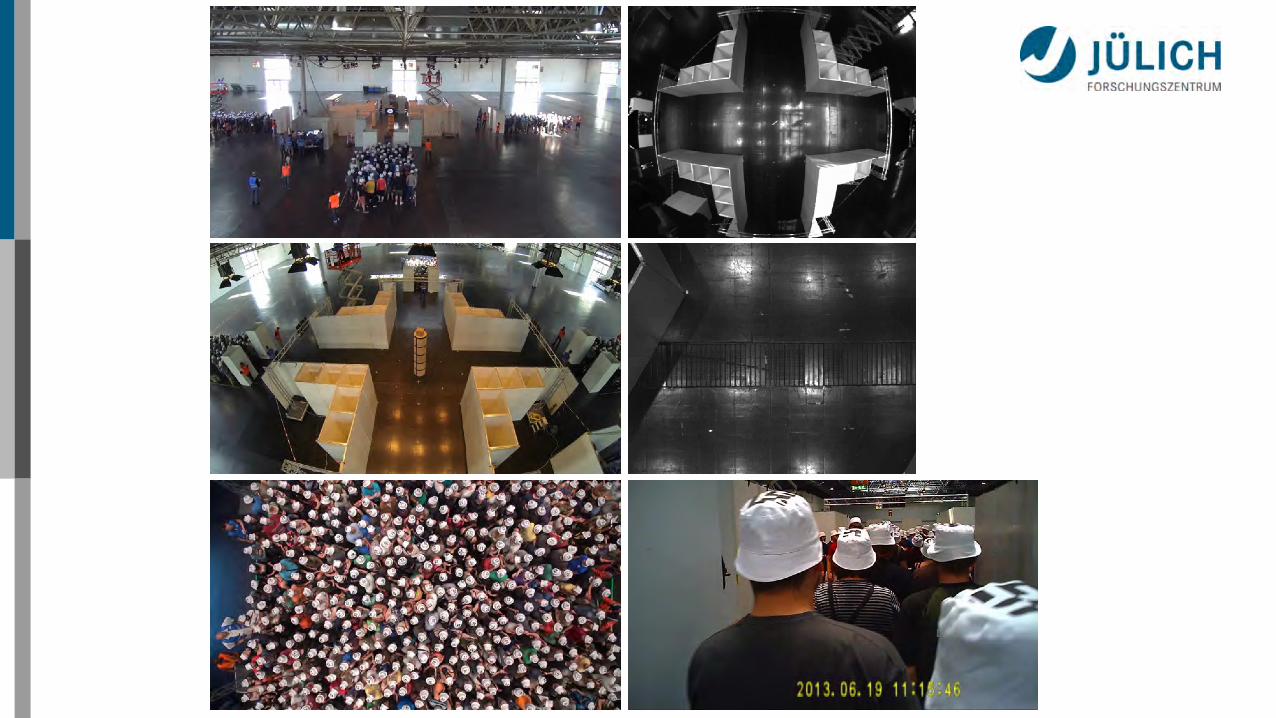
In artificial environments
Laboratoryexperiments
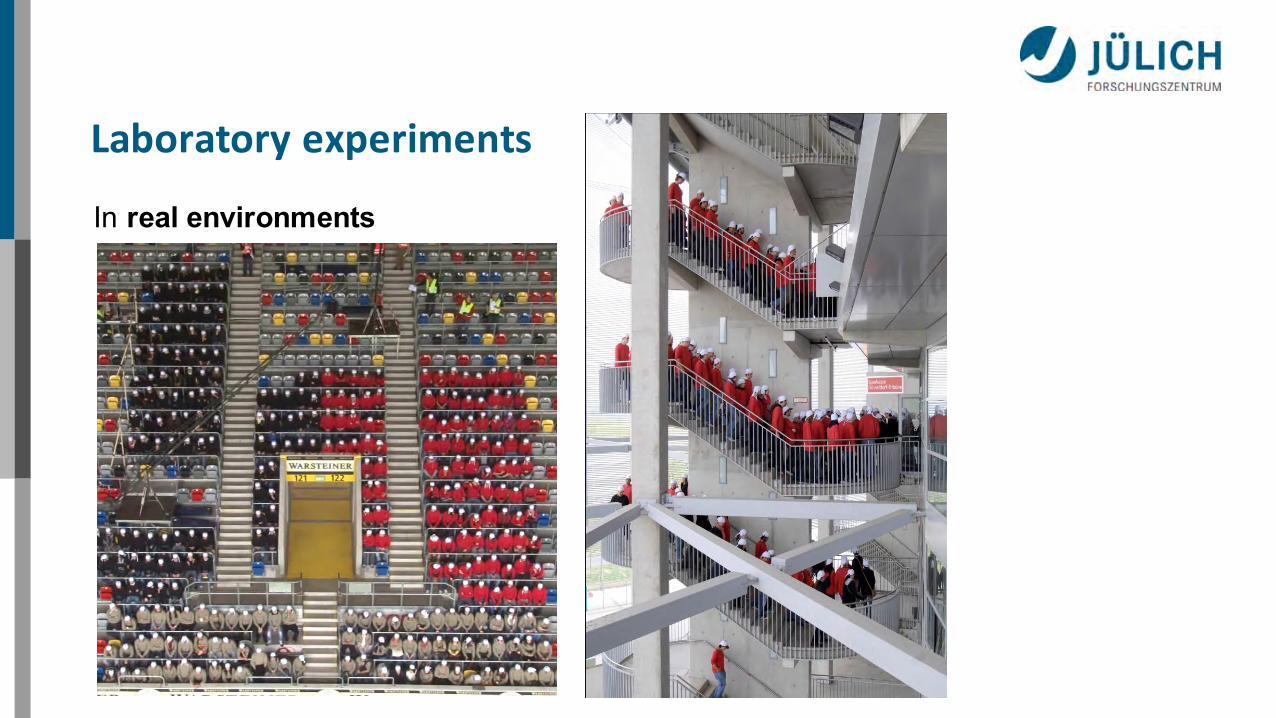
In real environments
Laboratoryexperiments
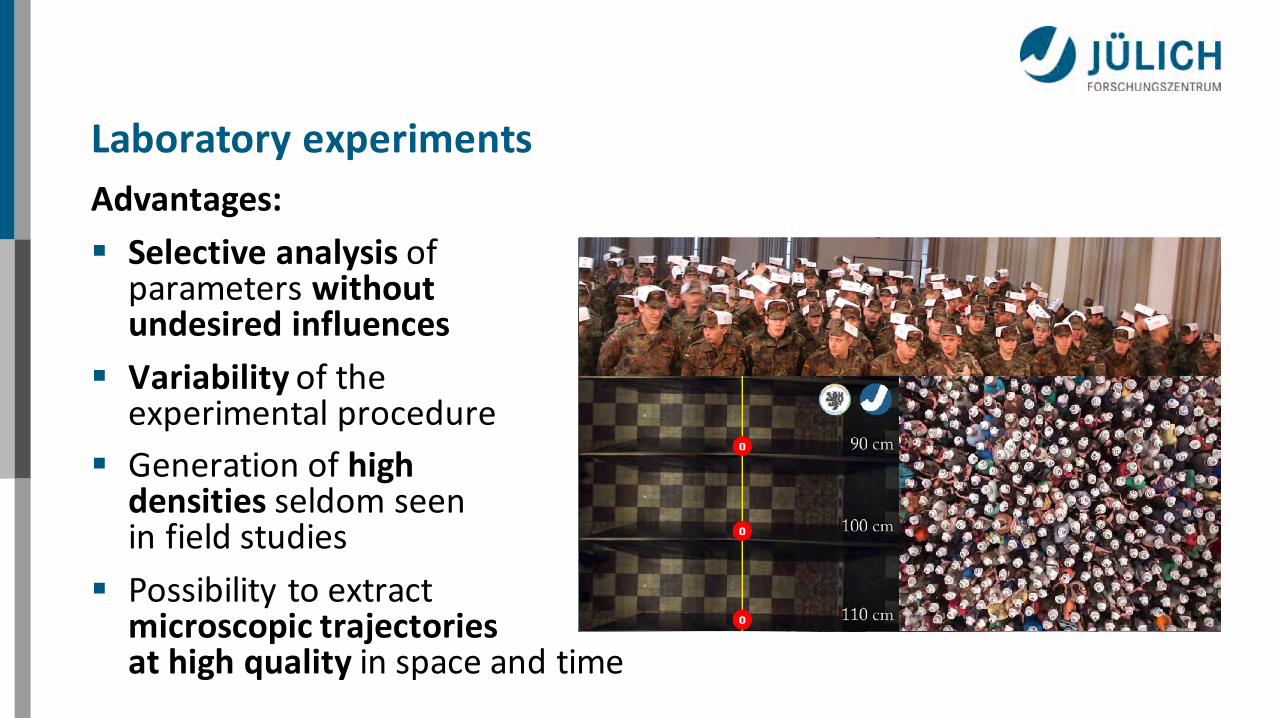
LaboratoryexperimentsAdvantages:§ Selectiveanalysis ofparameterswithoutundesiredinfluences
§ Variability oftheexperimentalprocedure
§ Generationofhighdensitiesseldomseeninfieldstudies
§ Possibilitytoextractmicroscopictrajectoriesathighqualityinspaceandtime

Goalofextraction§ Individualtrajectories§ Lowspatialerror§ Nearlynodetectionerror
§ Calculabilityofallquantitiesdescribingthepedestriandynamicsatanytimeandanyplace
→

Automaticextractionofindividualtrajectories
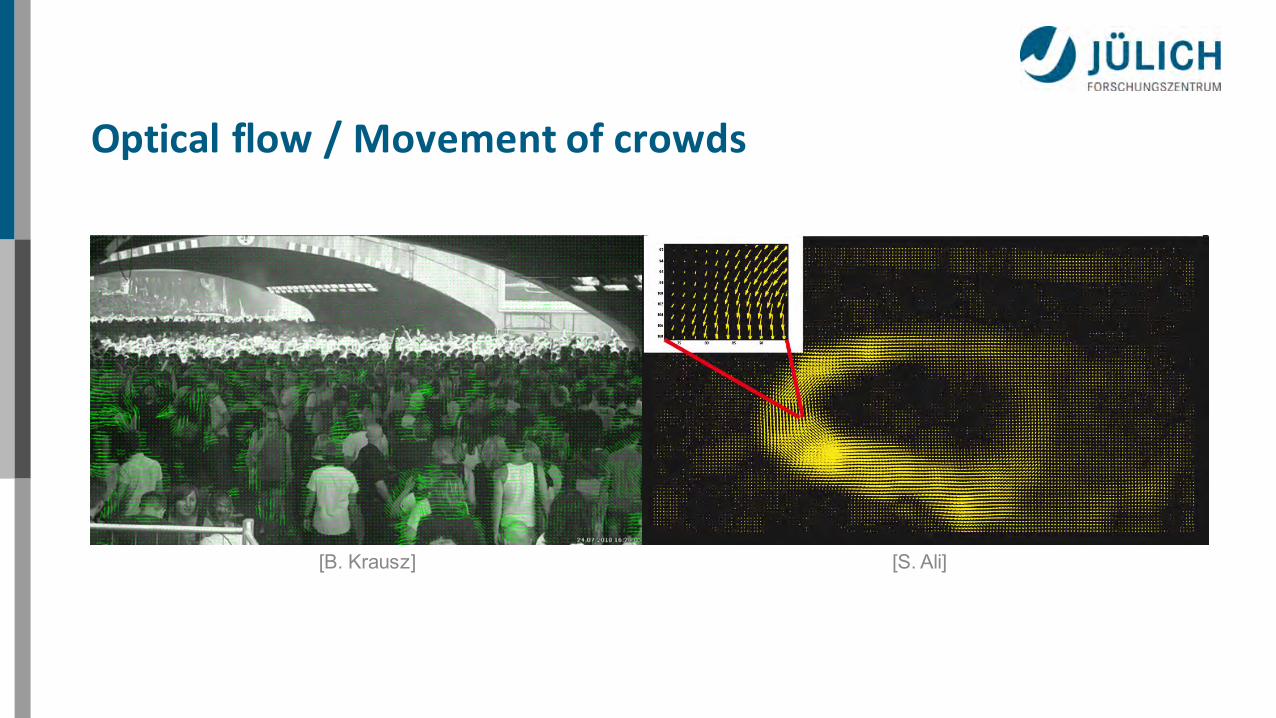
Opticalflow /Movementof crowds
[B. Krausz] [S. Ali]
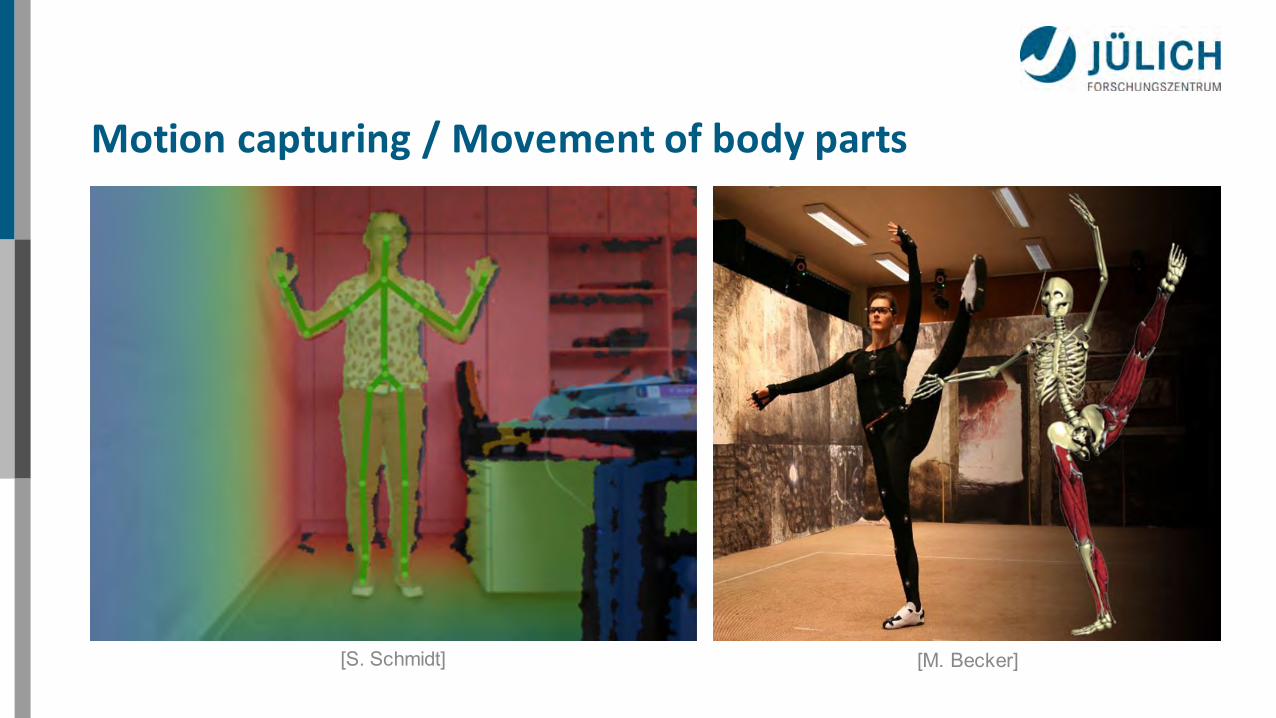
Motioncapturing /Movementof body parts
[S. Schmidt] [M. Becker]
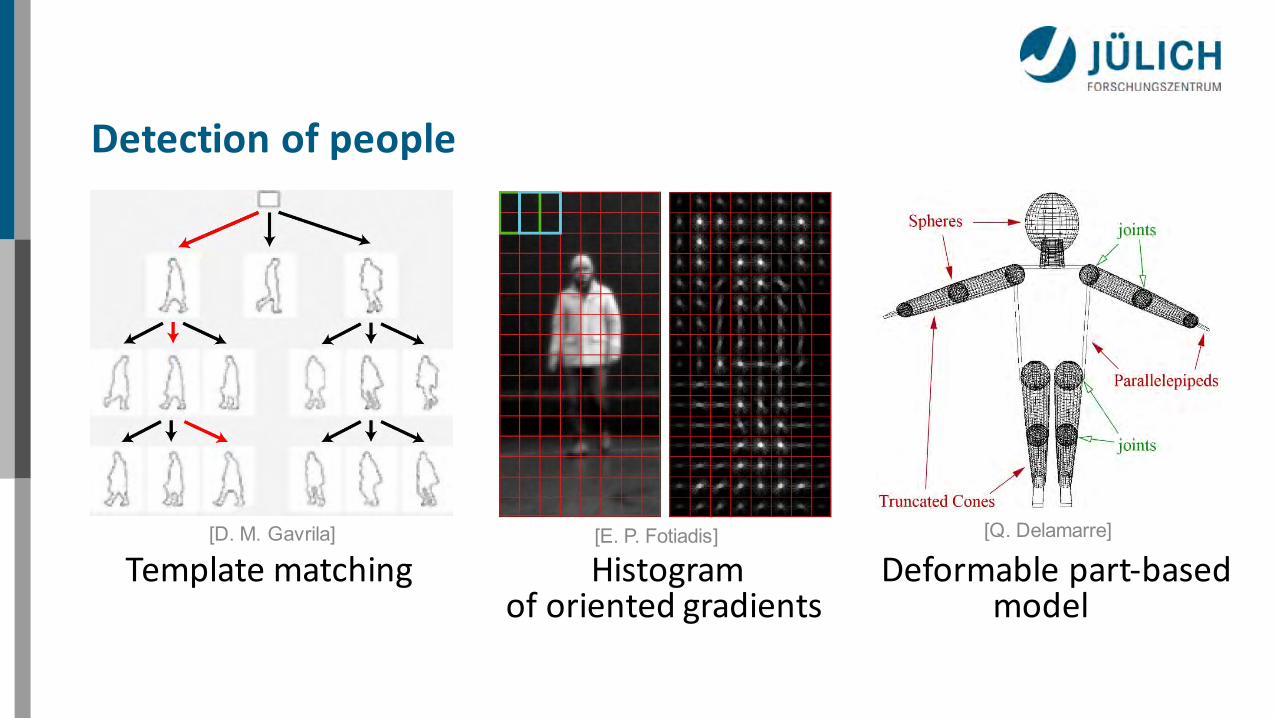
Detection of people
TemplatematchingHistogramDeformablepart-basedoforientedgradientsmodel
[D. M. Gavrila] [E. P. Fotiadis] [Q. Delamarre]
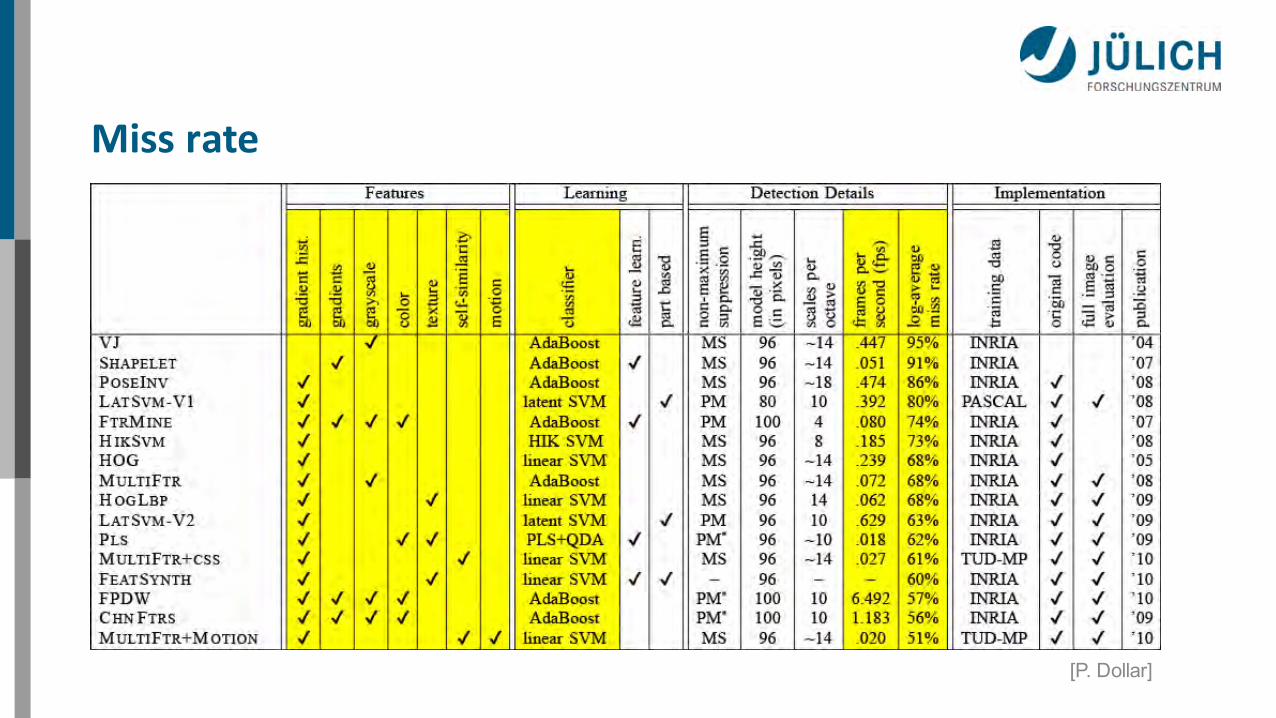
Missrate
[P. Dollar]
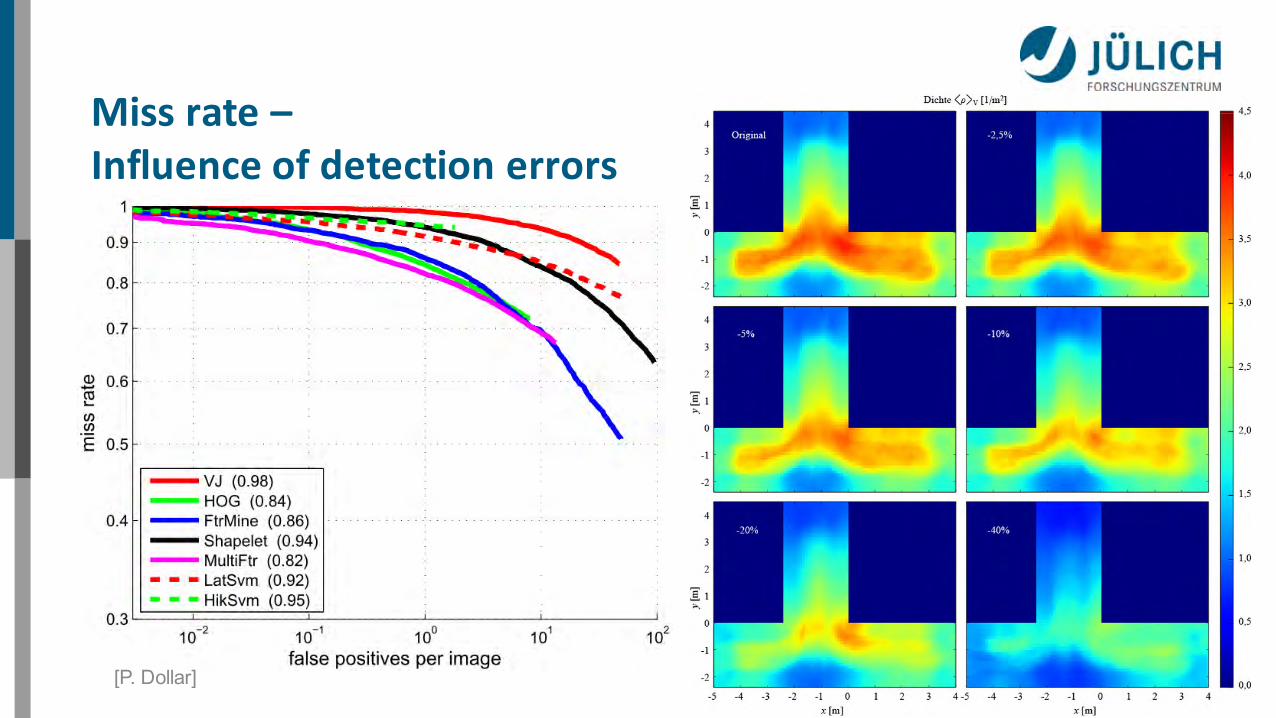
Missrate–Influence ofdetection errors
[P. Dollar]

Markersenables robustextraction
[S. P. Hoogendoorn] [W. Daamen] [S. Saadat]
[X. Liu] [W. Song][S. Wong]

Markersenables robustextraction
[M. Bukacek]
[M. Bukacek][D. Stuart]

1.Calibration 2.Detection
3.Tracking 4.HeightDetection
Extraction of Trajectories
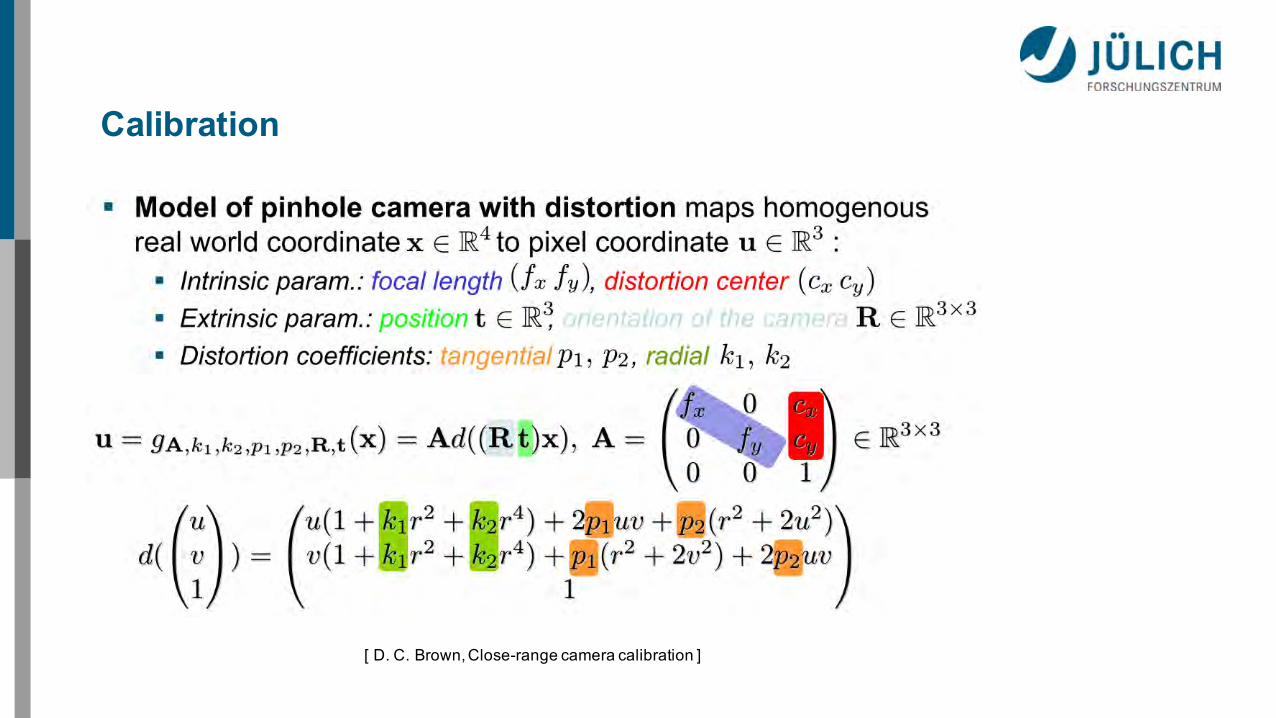
Calibration
Undistortion due to distorting objectives:§ Model of pinhole camera with distortion maps
homogenous real world coordinate to pixel coordinate :§ Intrinsic param.: focal length , distortion center§ Extrinsic param.: position , orientation of the
camera§ Distortion coefficients: tangential , radial
[ D. C. Brown, Close-range camera calibration ]

[ Z. Zhang, A flexible new technique for camera calibration ]
Calibration (intrinsic)

2D/3D point correspondences / calibration points§ At least 4 point correspondences needed§ 3D points not all in one plane§ Iterative algorithm calculates the translation and the rotation of the camera
Calibration (extrinsic)

Field of view influenced by § Focal length of lens§ Pitch of camera§ Height of ceiling
Calibration (multiple views)

§ Largerobservationspace§ Smallerfieldofview→lessocclusion§ Complexcalibration
Calibration (overlapping camera grid)
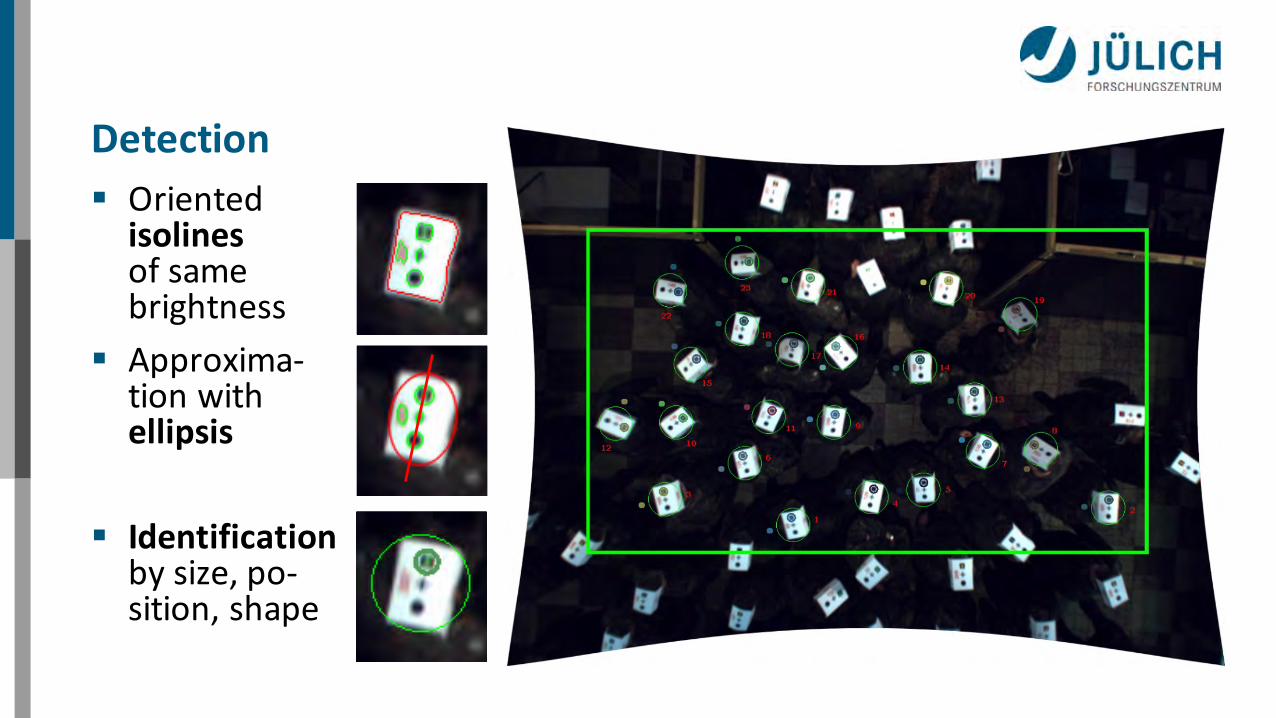
Detection§ Orientedisolinesof samebrightness
§ Approxima-tion withellipsis
§ Identificationby size,po-sition,shape
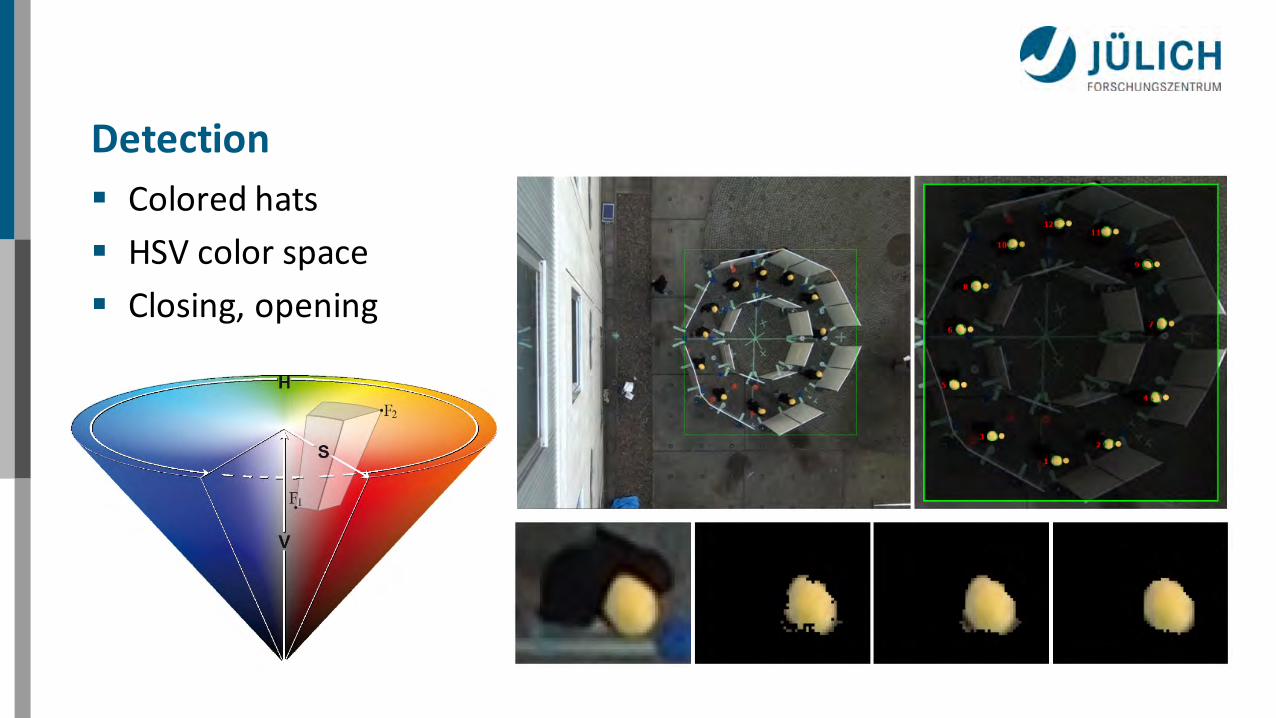
Detection§ Colored hats§ HSVcolor space§ Closing,opening
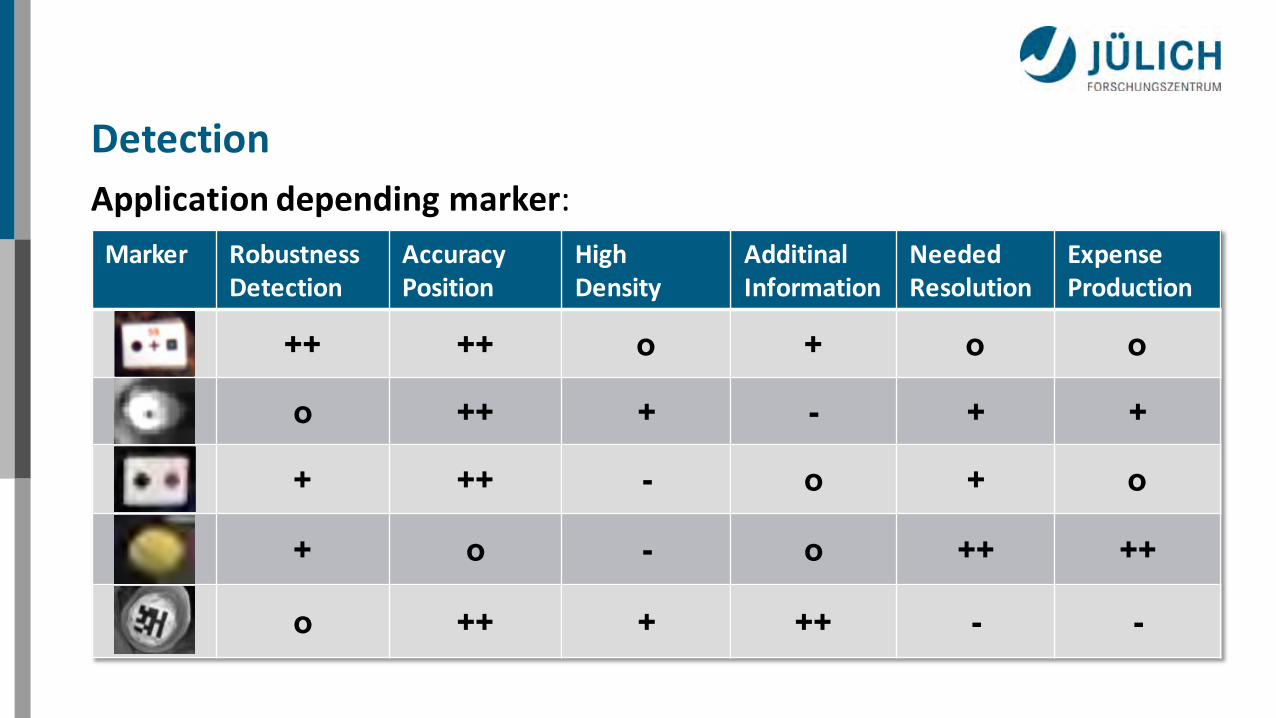
DetectionApplication depending marker:Marker Robustness
DetectionAccuracyPosition
HighDensity
AdditinalInformation
NeededResolution
ExpenseProduction
++ ++ o + o o
o ++ + - + +
+ ++ - o + o
+ o - o ++ ++
o ++ + ++ - -
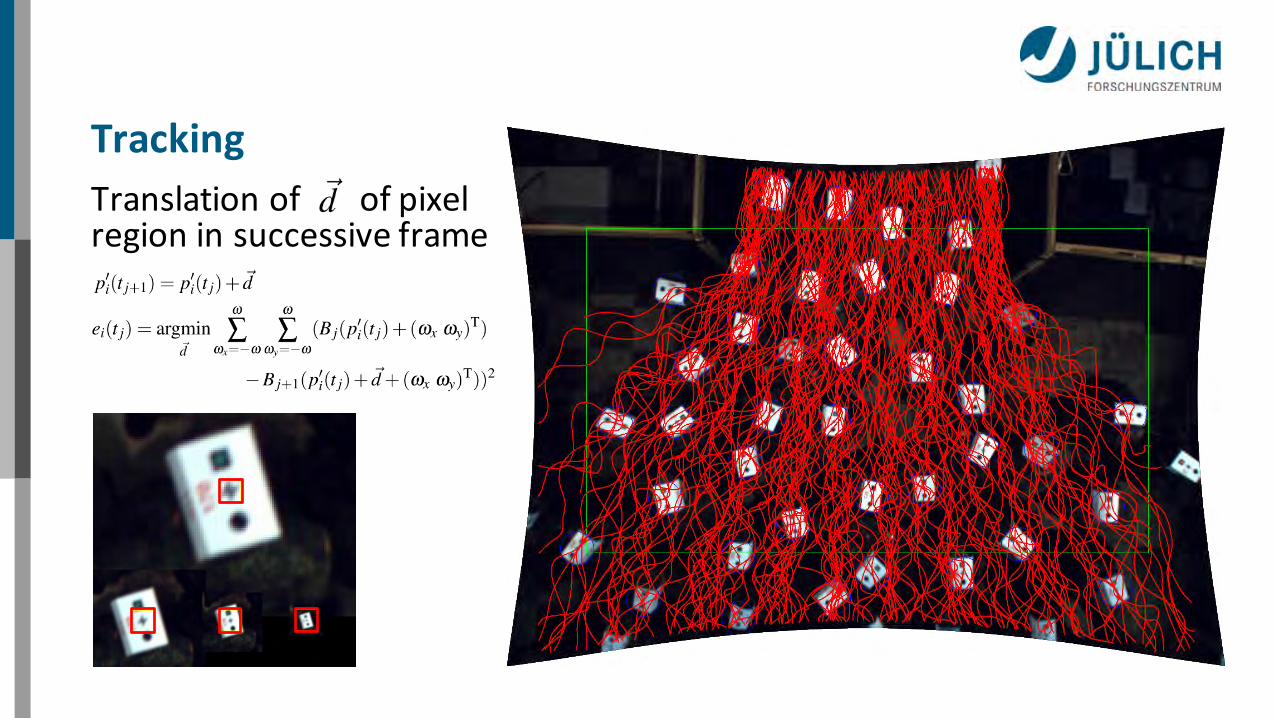
TrackingTranslationof of pixelregion insuccessive frame
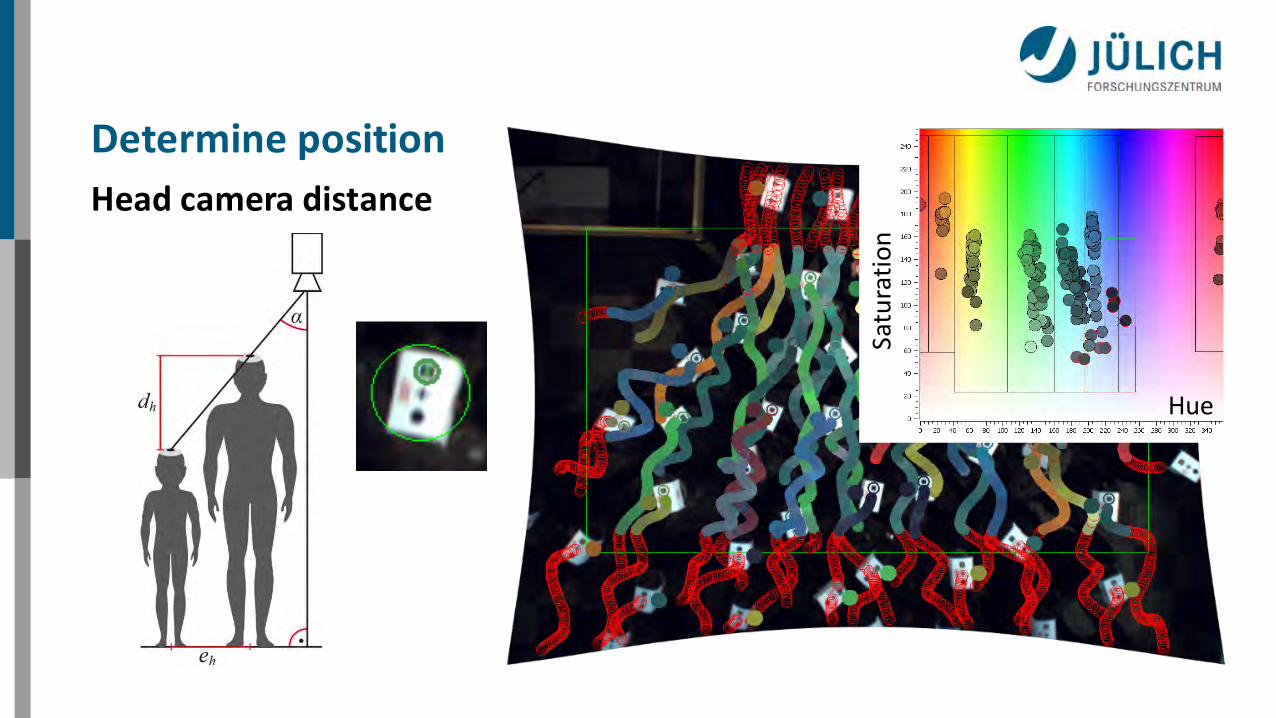
Determine positionHeadcamera distance
Hue
Saturatio
n

Determine positionPositionerror caused byheight difference
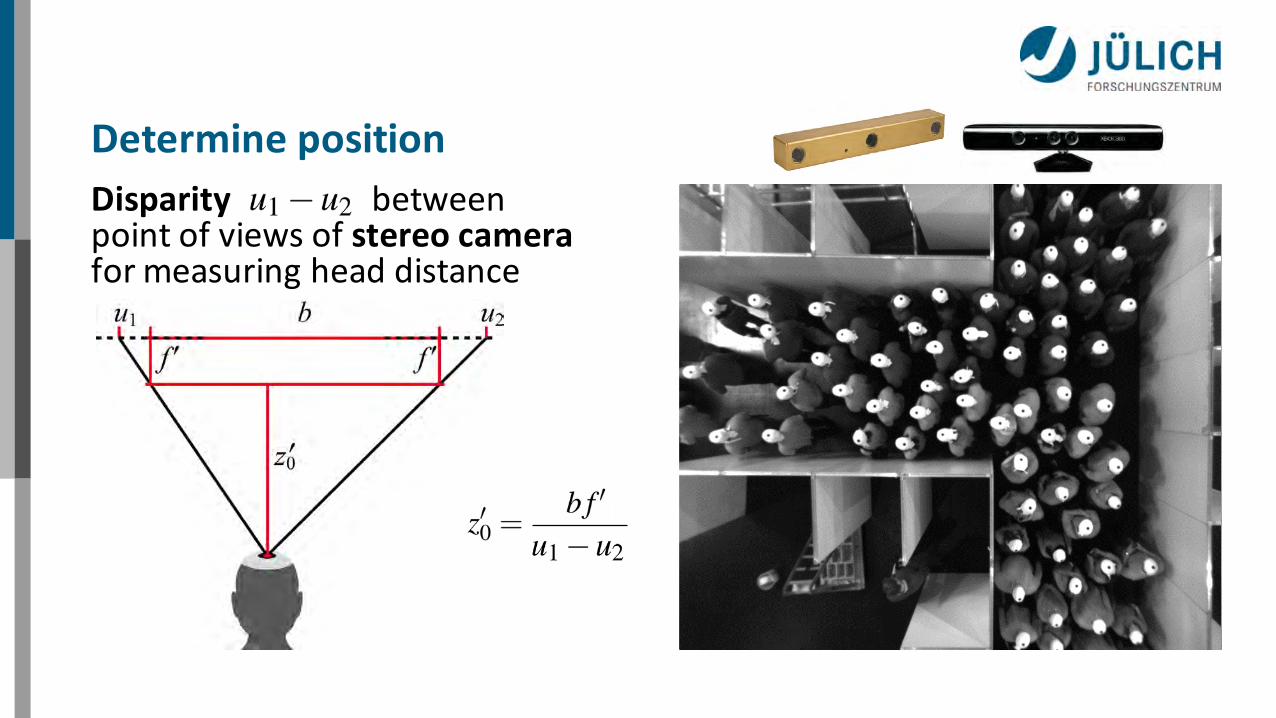
Disparity betweenpoint of views of stereo camerafor measuring head distance
Determine position

Disparity betweenpoint of views of stereo camerafor measuring head distance
Determine position


Analysisresults by example

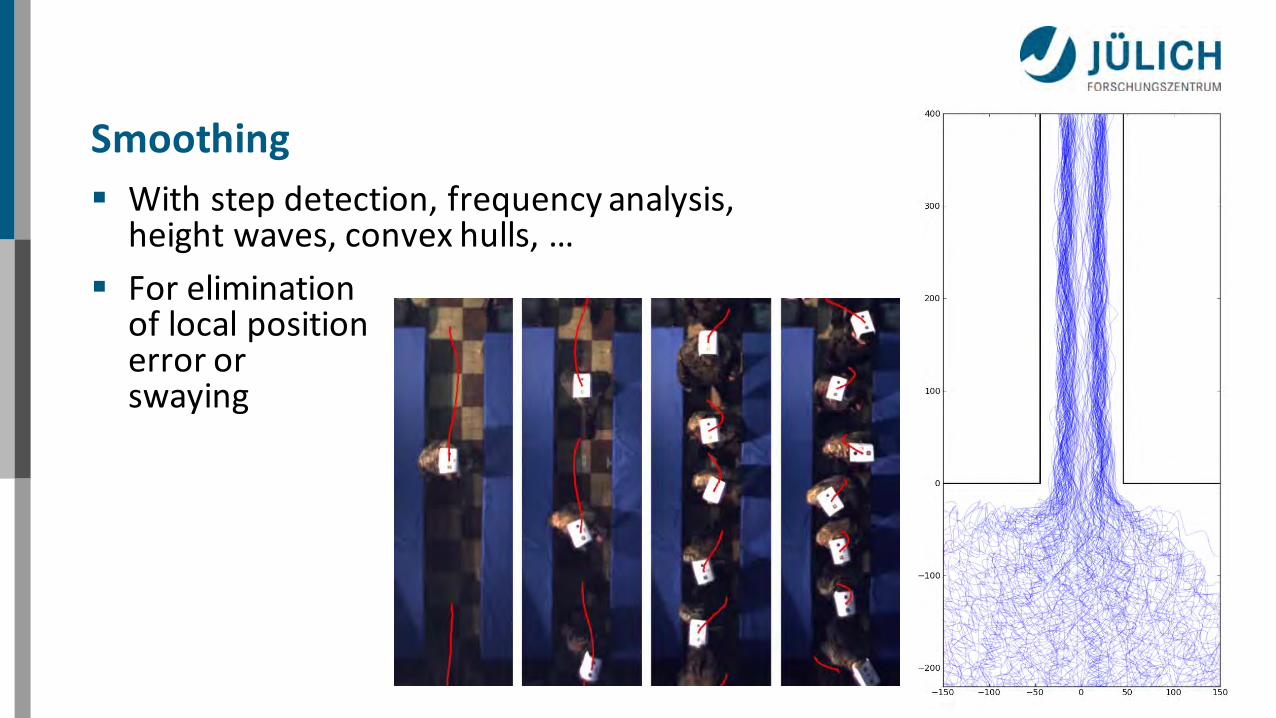
Smoothing§ Withstepdetection,frequencyanalysis,heightwaves,convexhulls,…
§ Foreliminationoflocalpositionerrororswaying
x [cm]
Movement direction x [cm]
Persons’ height
vertical (size)lateral (swaying)
Smoothing§ Withstepdetection,frequencyanalysis,heightwaves,convexhulls,…
§ Foreliminationoflocalpositionerrororswaying
x [cm]
y [cm]
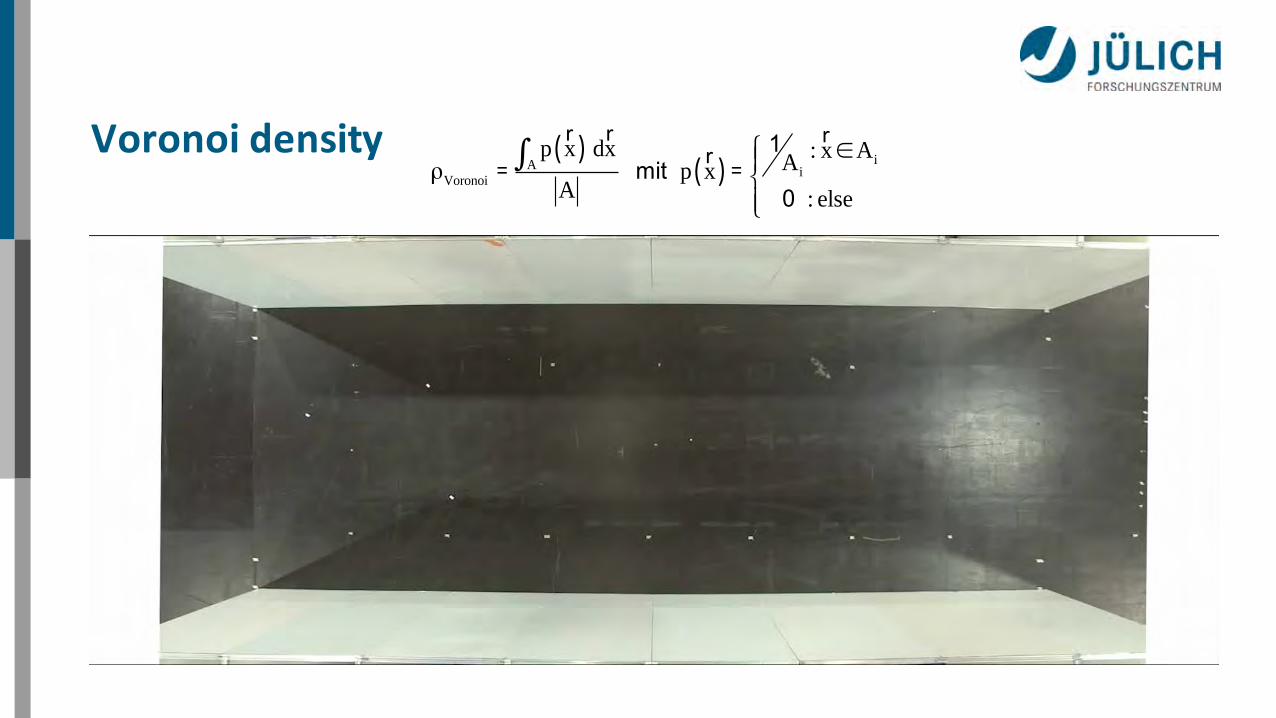
Voronoi density ( )( ) iA iVoronoi
p x dx : x AAp xA : else
⎧ ∈⎪ρ = = ⎨
⎪⎩
∫r r r
r 1 mit
0
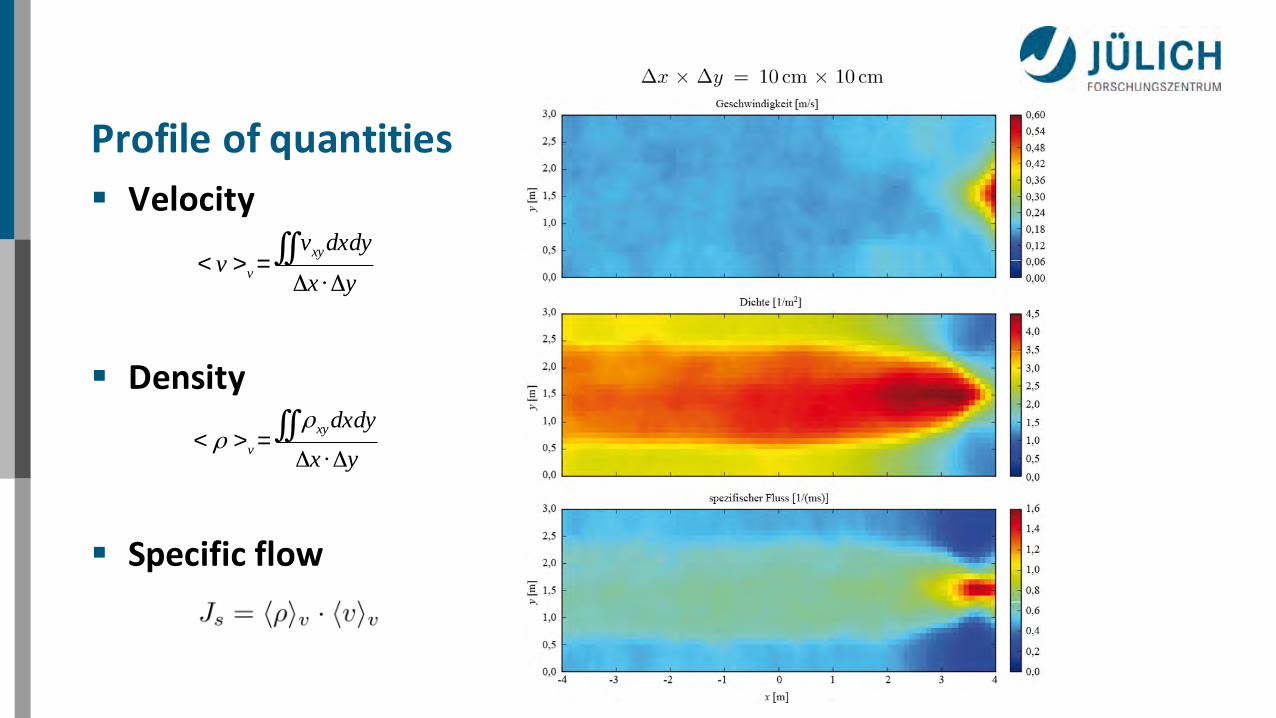
§ Velocity
§ Density
§ Specificflow
Profileof quantities
yx
dxdyxyv Δ⋅Δ=>< ∫∫ρρ
yx
dxdyvv xy
v Δ⋅Δ=>< ∫∫
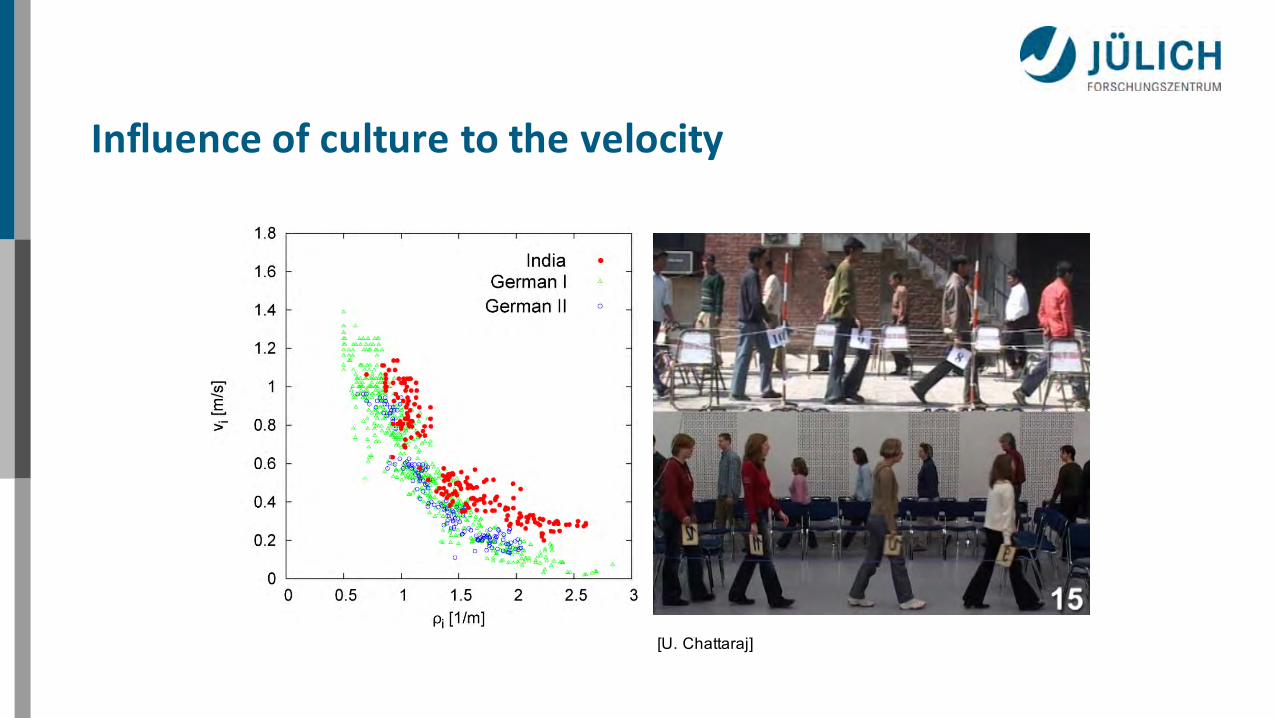
Influence of culture to the velocity
[U. Chattaraj]

Influence of motivation to the velocity
[J. Lukowski]
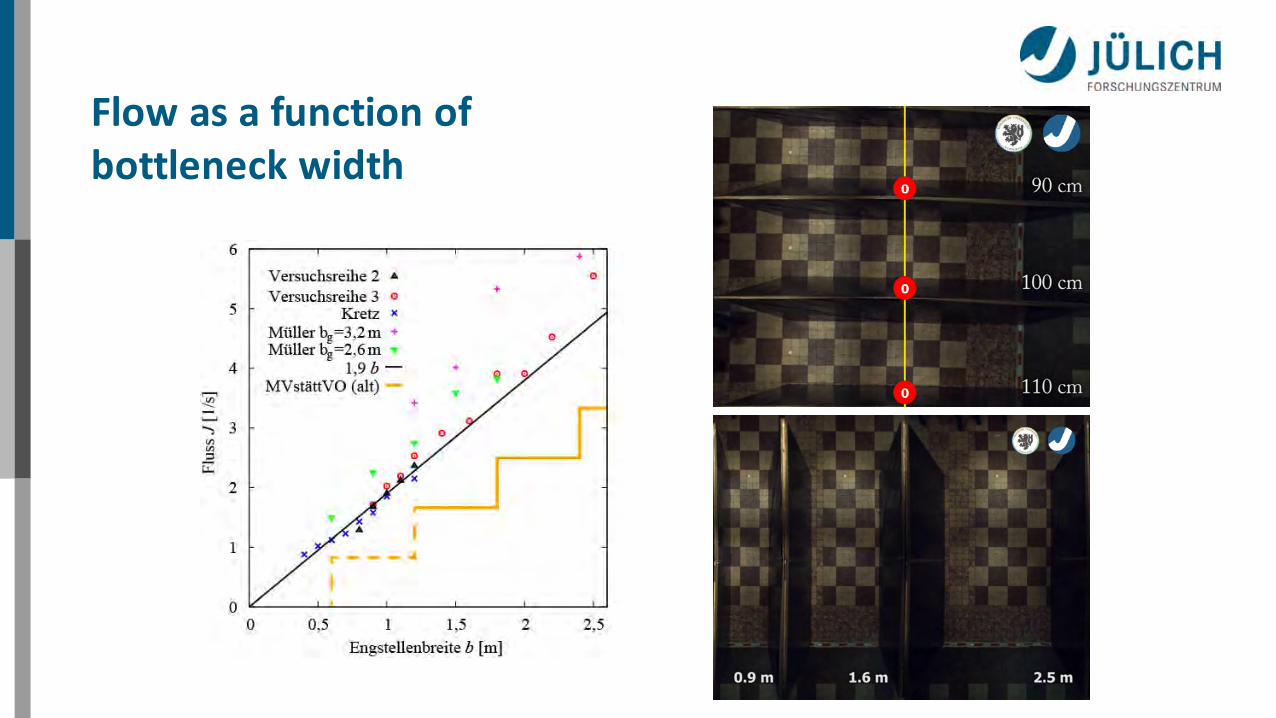
Flowas afunction ofbottleneck width

Density profile§ Bidirectional
§ Unidirectional
§ Unidirectionalwith bottleneck
[J. Zhang]

Density infrontofbottleneck
[J. Liddle]

Specific flow profiles
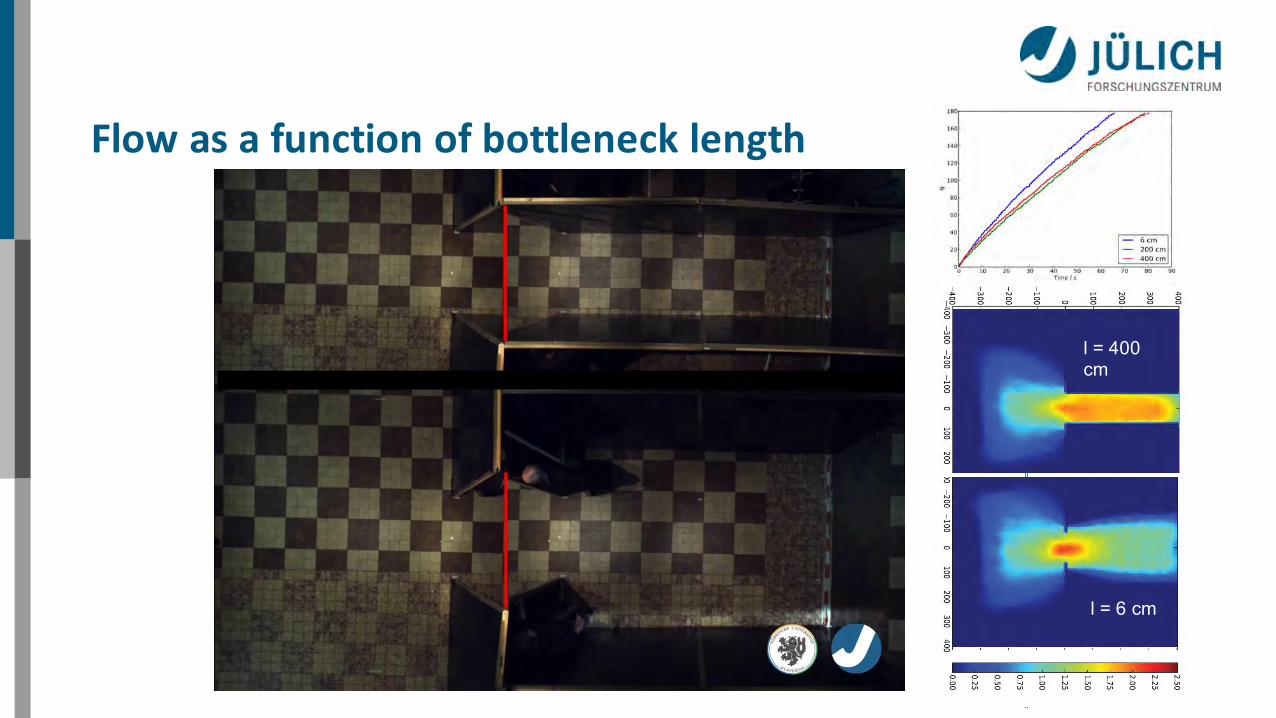
l = 6 cm
l = 400 cm
Flowas afunction of bottleneck length
l = 400 cm
l = 0.06
l = 6 cm
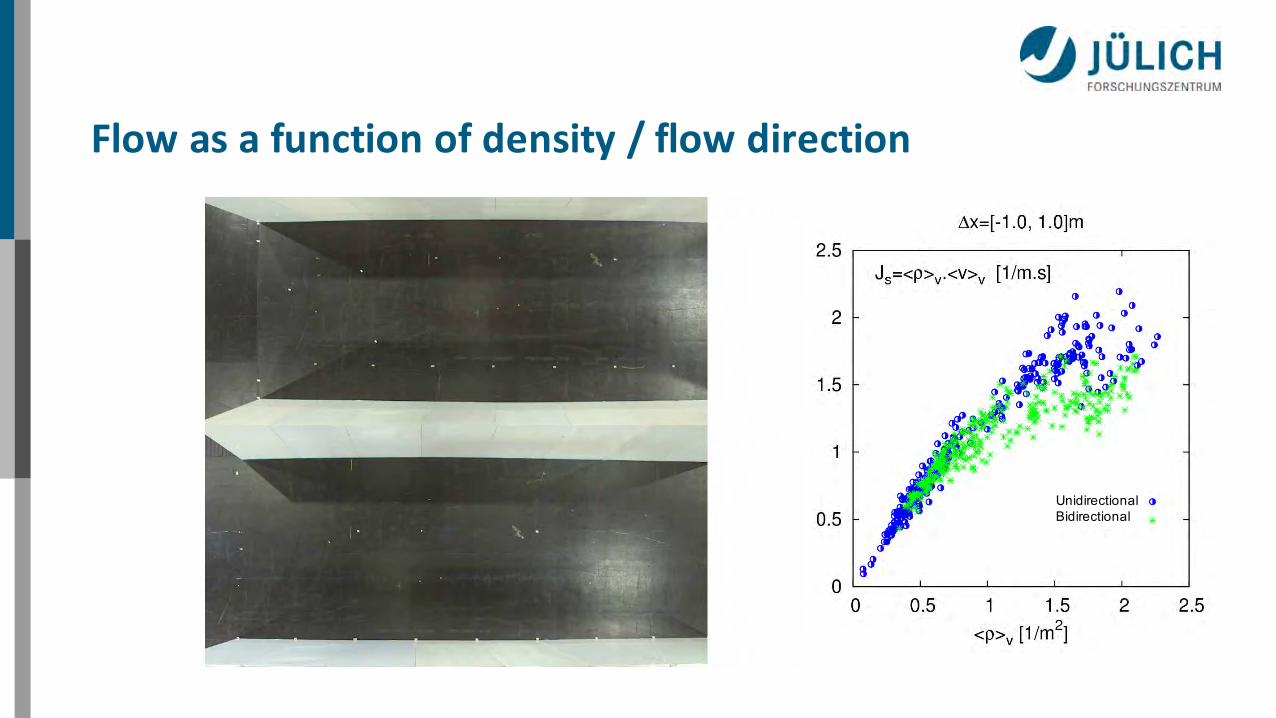
UnidirectionalBidirectional
Flowas afunction of density /flow direction

T-junction
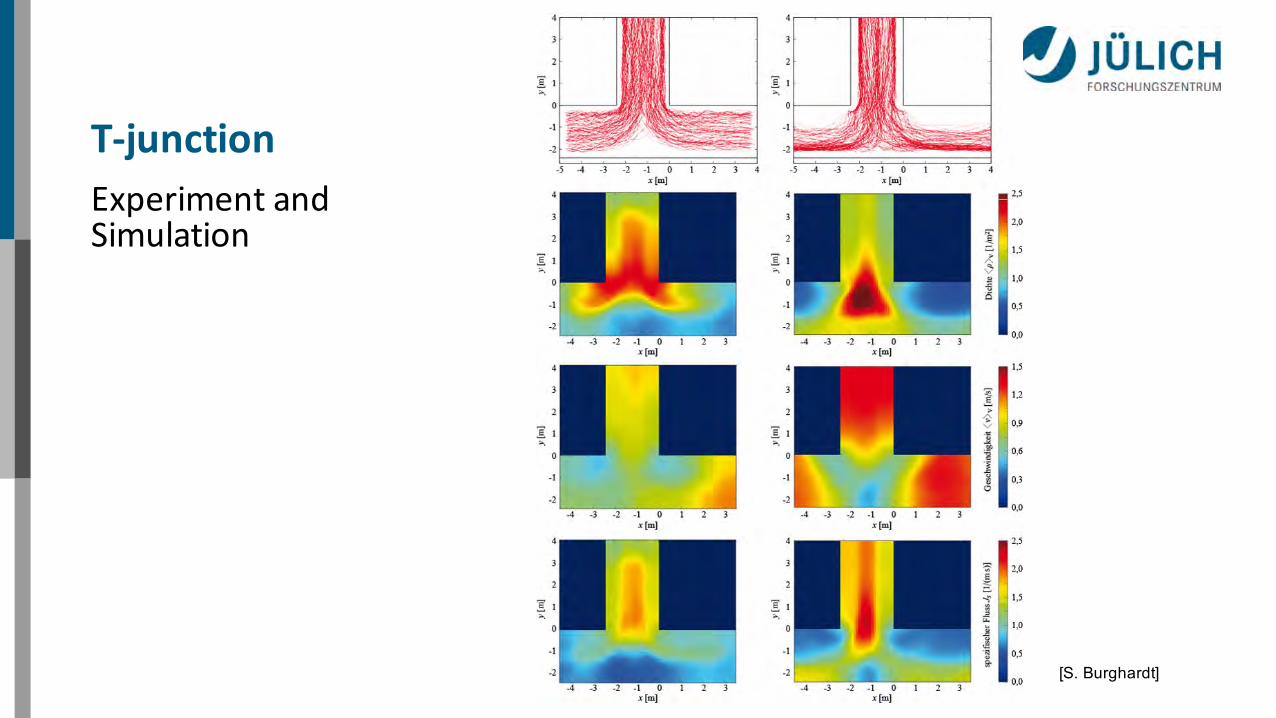
T-junctionExperimentandSimulation
[S. Burghardt]
Simulation
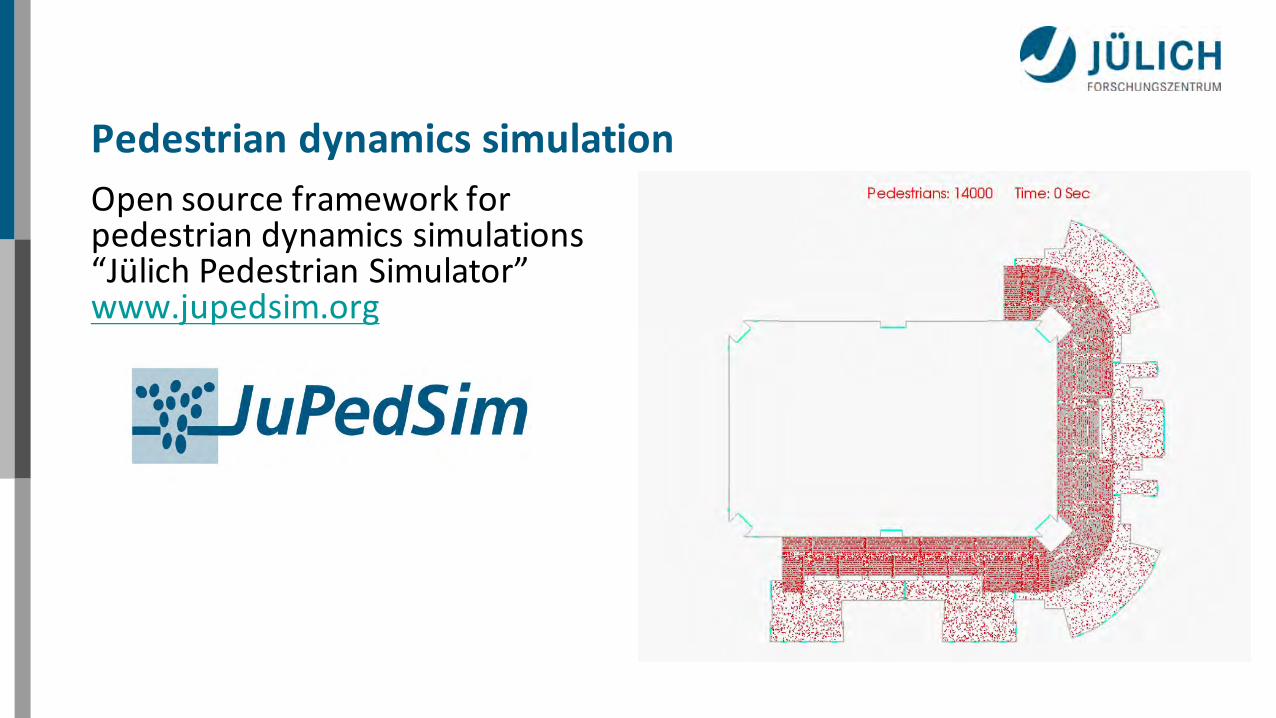
Pedestrian dynamics simulationOpensourceframeworkforpedestriandynamicssimulations“Jülich PedestrianSimulator”www.jupedsim.org

Simulationlevel
Strategic level
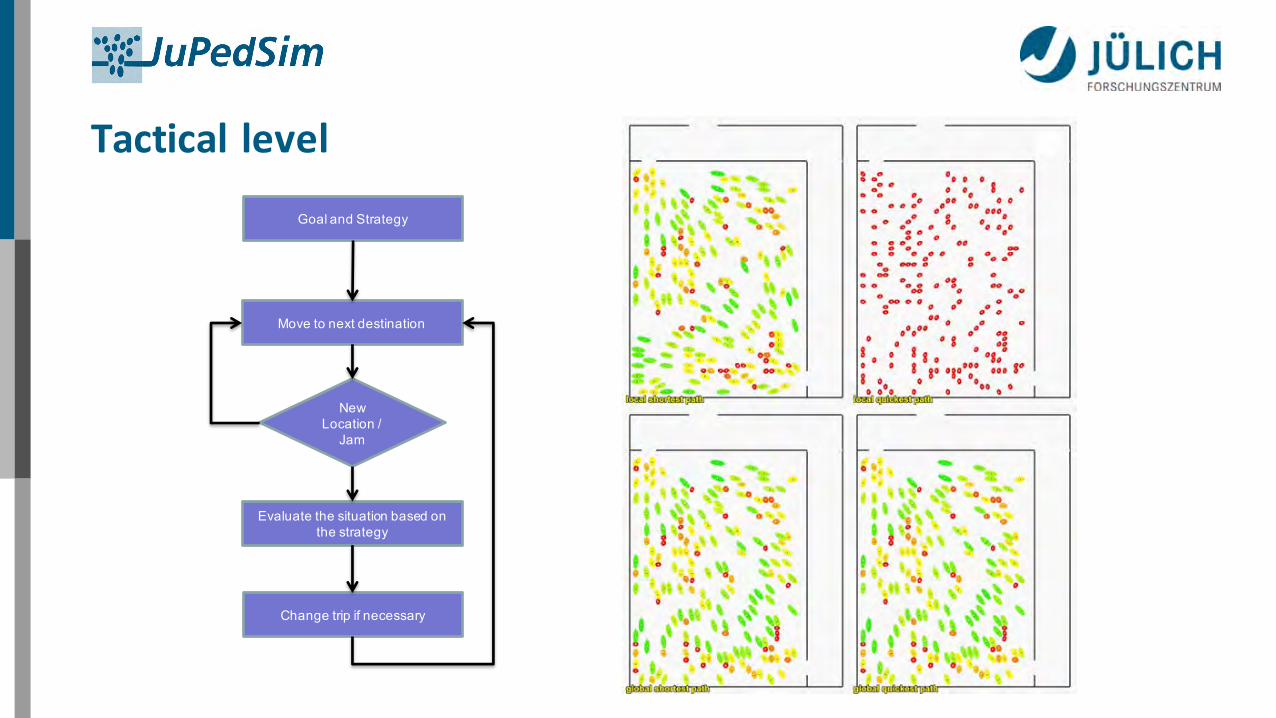
Tactical level
Operational level
Determination of the final destination and strategy to reach the goalParking, train stationQuickest path, known path
Determination of intermediate destinationsWalk, do not push, take left exit, lift,…
Locomotion systemGo, stop, slow down, swerve…
Tactical level
Goal and Strategy
Move to next destination
New Location /
Jam
Evaluate the situation based on the strategy
Change trip if necessary

Tactical level:Quickestpath based onvisibility
[Kemloh et al. “Modelling dynamic route choice of pedestrians to assess the criticality of building evacuation “, 2012, ACS.]
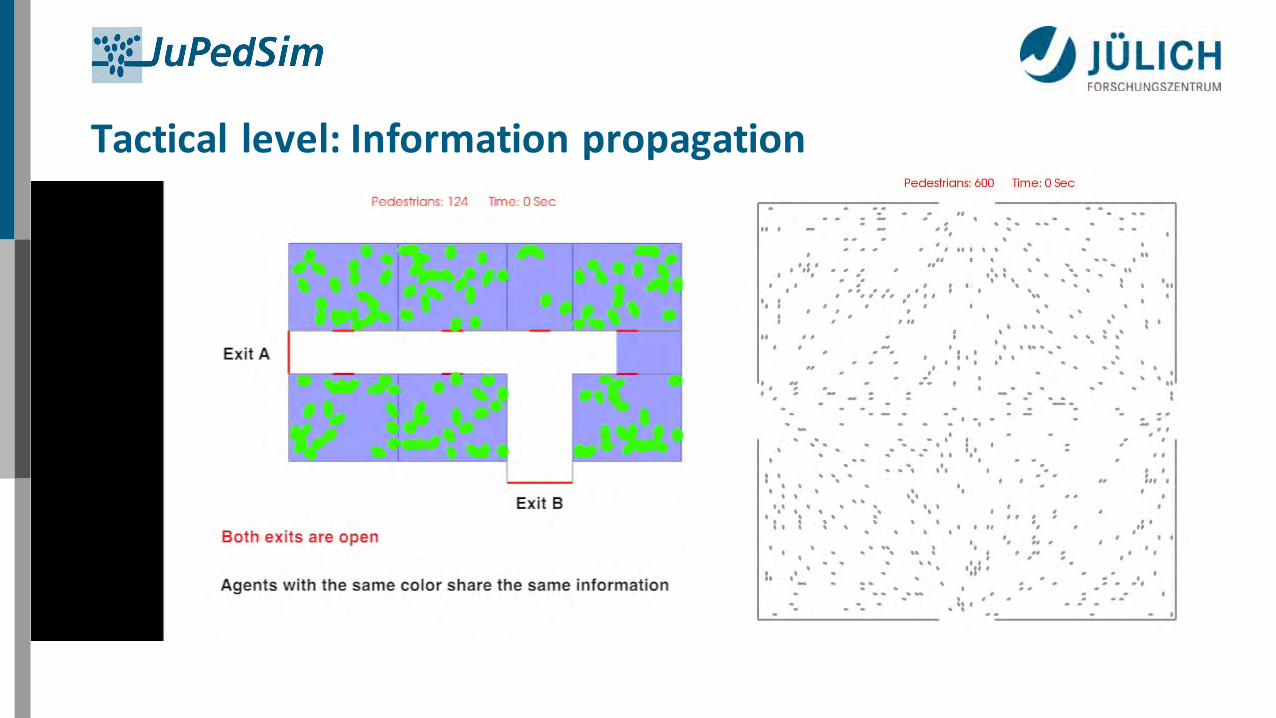
Tactical level:Informationpropagation
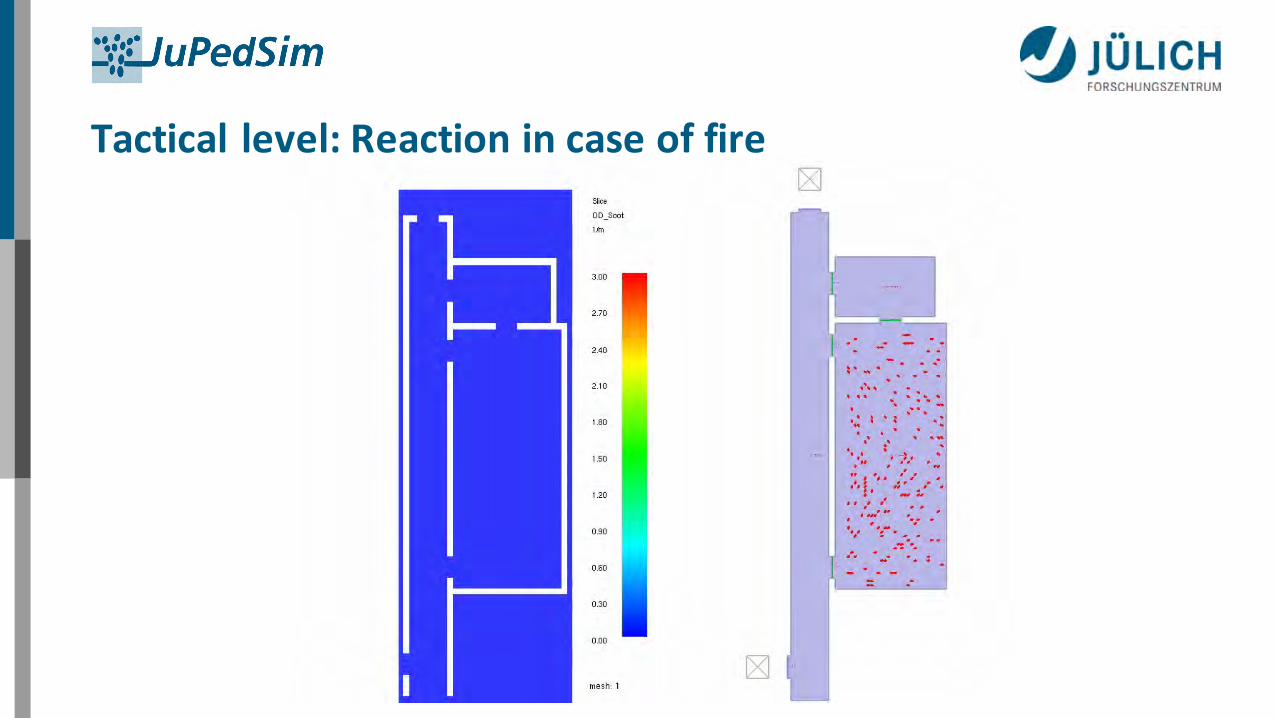
Tactical level:Reaction incase of fire

Operationallevel:Forcebasedmodelsincontinuousspace§ Equation of motion
§ Parallel update
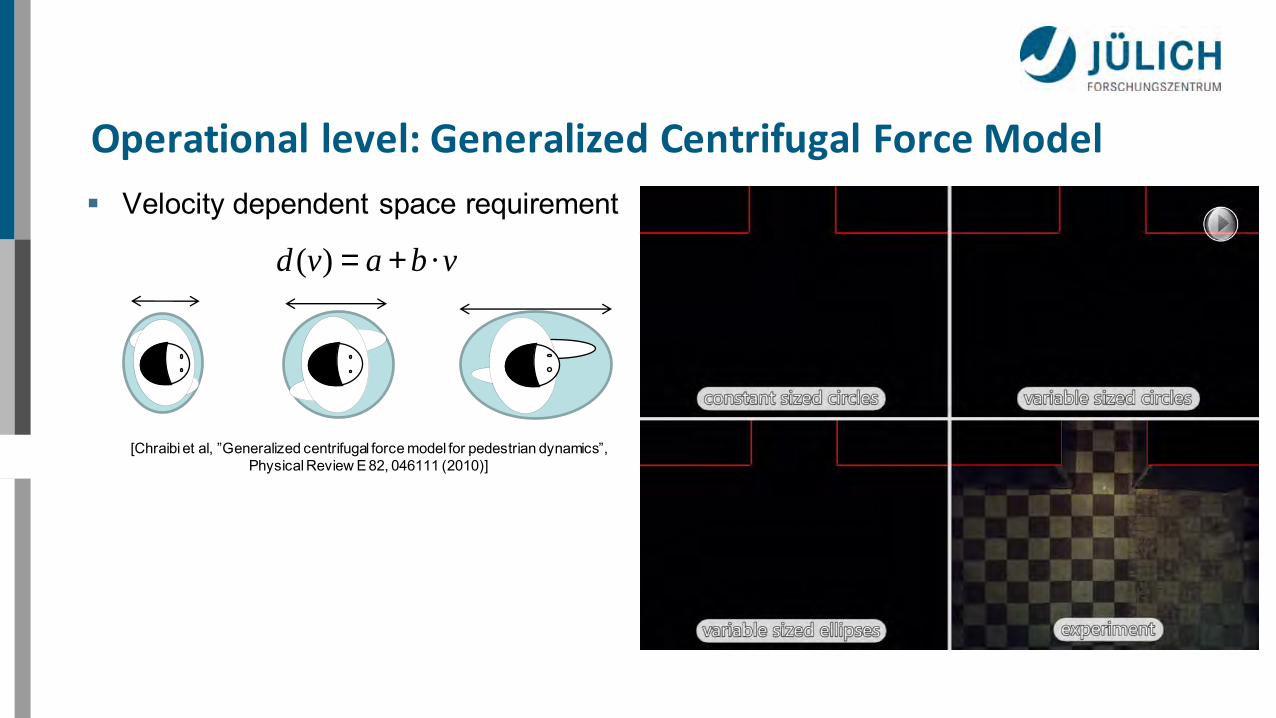
Operationallevel:GeneralizedCentrifugalForceModel§ Velocity dependent space requirement
( )d v a b v= + ⋅
[Chraibi et al, ”Generalized centrifugal force model for pedestrian dynamics”, Physical Review E 82, 046111 (2010)]
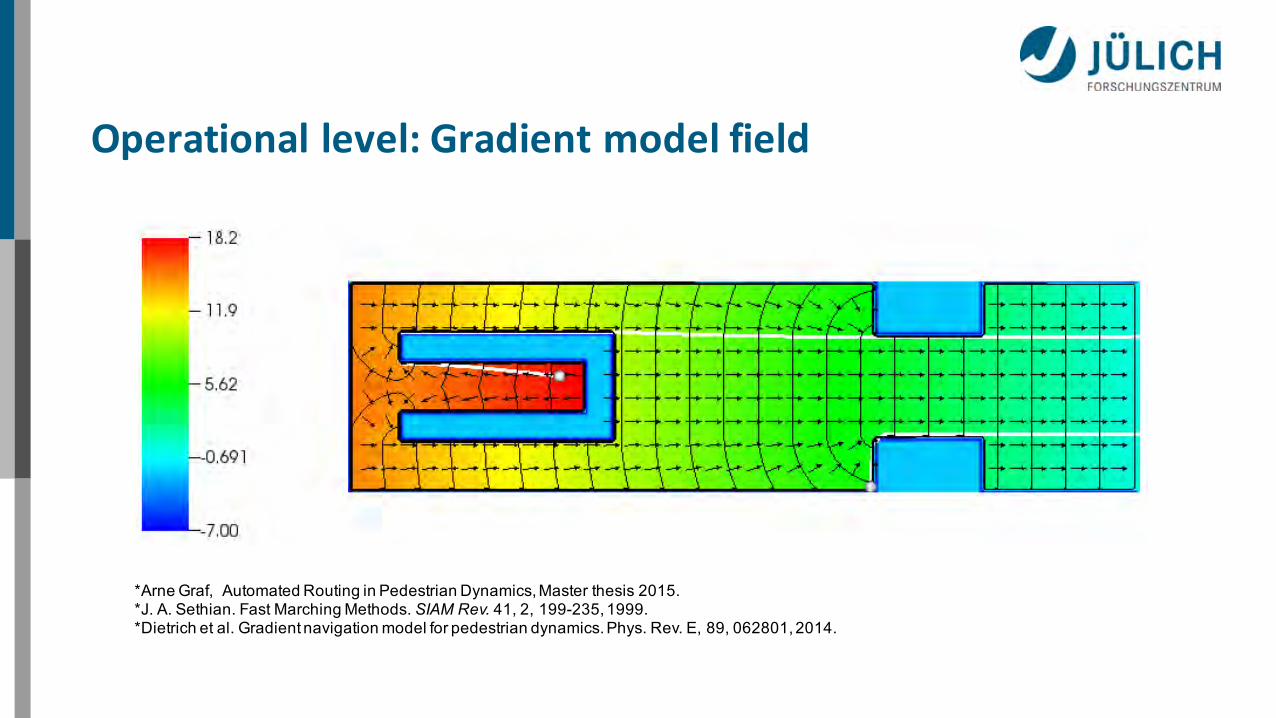
Operationallevel:Gradientmodelfield
*Arne Graf, Automated Routing in Pedestrian Dynamics, Master thesis 2015.*J. A. Sethian. Fast Marching Methods. SIAM Rev. 41, 2, 199-235, 1999.*Dietrich et al. Gradient navigation model for pedestrian dynamics. Phys. Rev. E, 89, 062801, 2014.
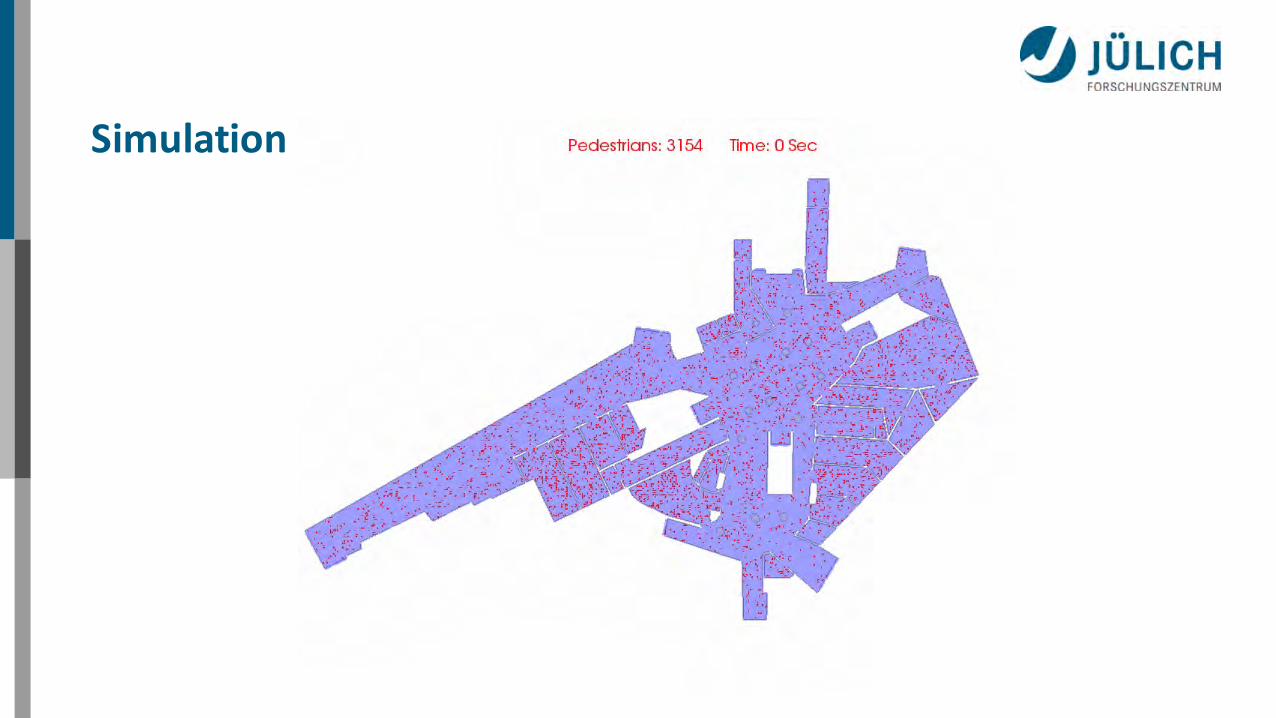
Simulation
Hybridsimulation – coupling with macroscopic simulation

Verificationandvalidationofmodels
Verification and validation of models§ Verification
§ Makesuretheimplementationiscorrect§ Testiftheimplementationoftheunderlyingmodeliscorrect§ (Unittesting)
§ Validation§ Testtherealismofthemodel§ Comparisonwithempiricaldata§ Fundamentaldiagram,flow,fieldobservations,…
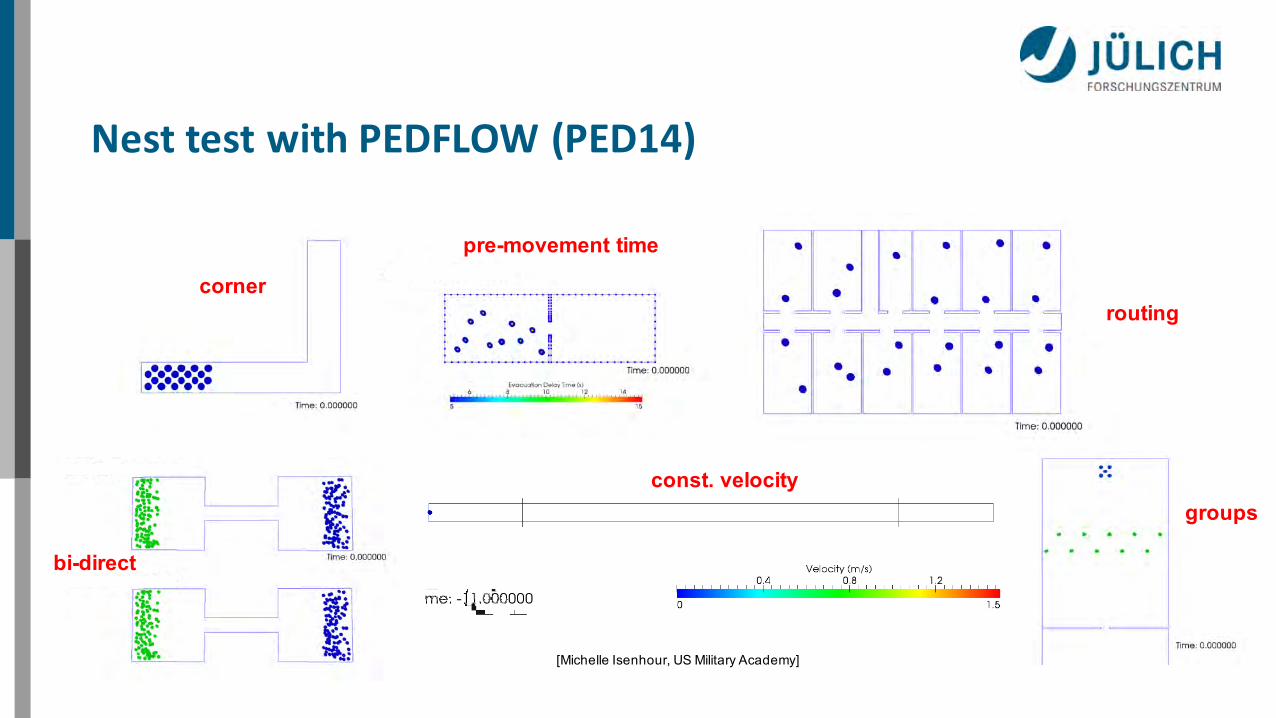
groups
Nesttest with PEDFLOW(PED14)
routing
bi-direct
const. velocity
corner
pre-movement time
[Michelle Isenhour, US Military Academy]
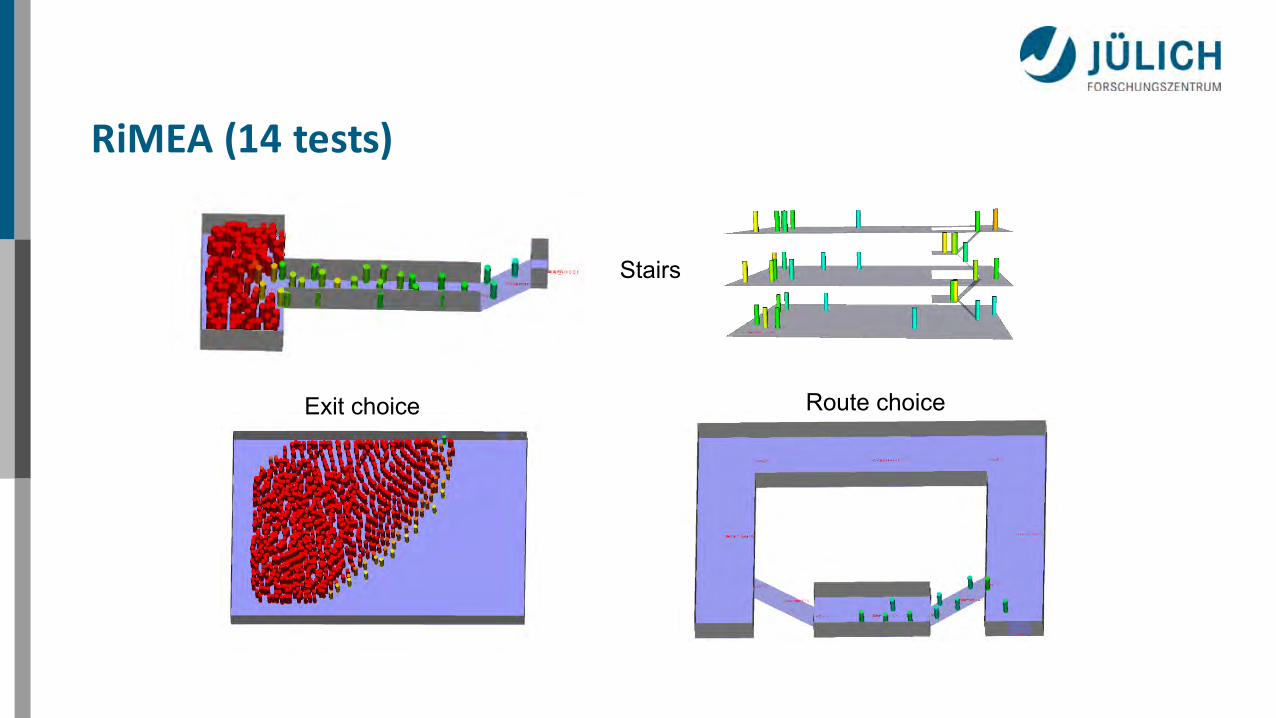
RiMEA (14tests)
Exit choice
Stairs
Route choice
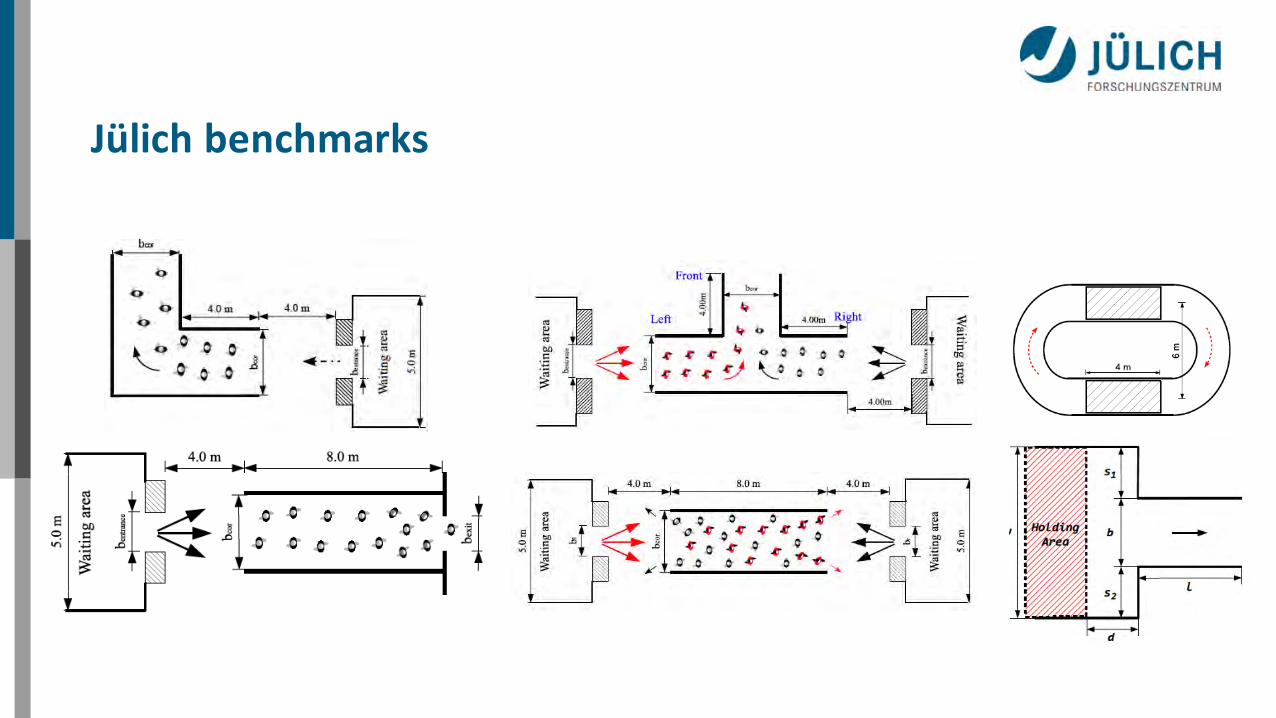
Jülichbenchmarks

OpenAccess

§ Name:PeTrack(PEdestrian TRACKing)
§ URL(download,help):http://ped.fz-juelich.de/petrack
§ Language:English§ License:free§ OperatingSystems:Windows,Linux,…§ ProgrammingLanguage:C++§ UsedSoftwareLibraries:
§ UserInterface:Qt,Qwt§ ImageProcessing:OpenCV,Triclops (PointGrey)
CVSoftware
Database§ Afterfinishing thesis about experiments alldata (videos,trajectories,documentation)published publicly available
§ http://ped.fz-juelich.de/database
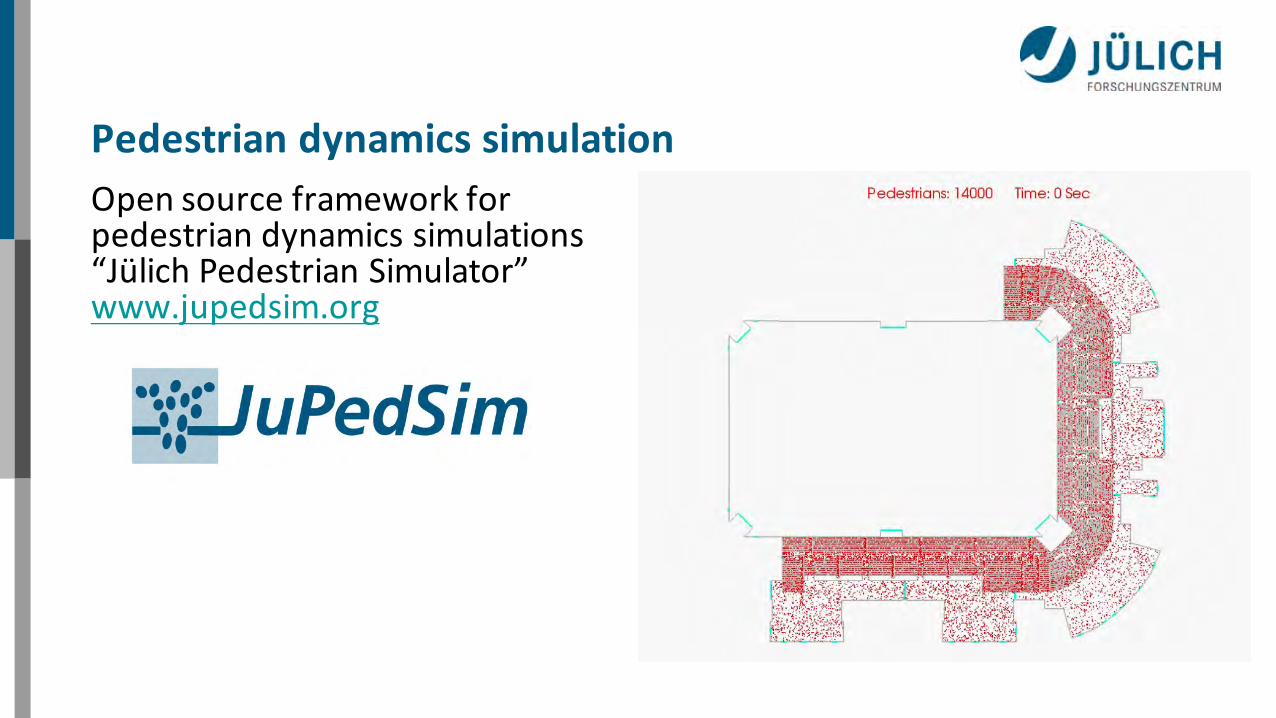
Pedestrian dynamics simulationOpensourceframeworkforpedestriandynamicssimulations“Jülich PedestrianSimulator”www.jupedsim.org

Maik Boltes Experiments, Technique, Extraction of trajectories

Thankyou!
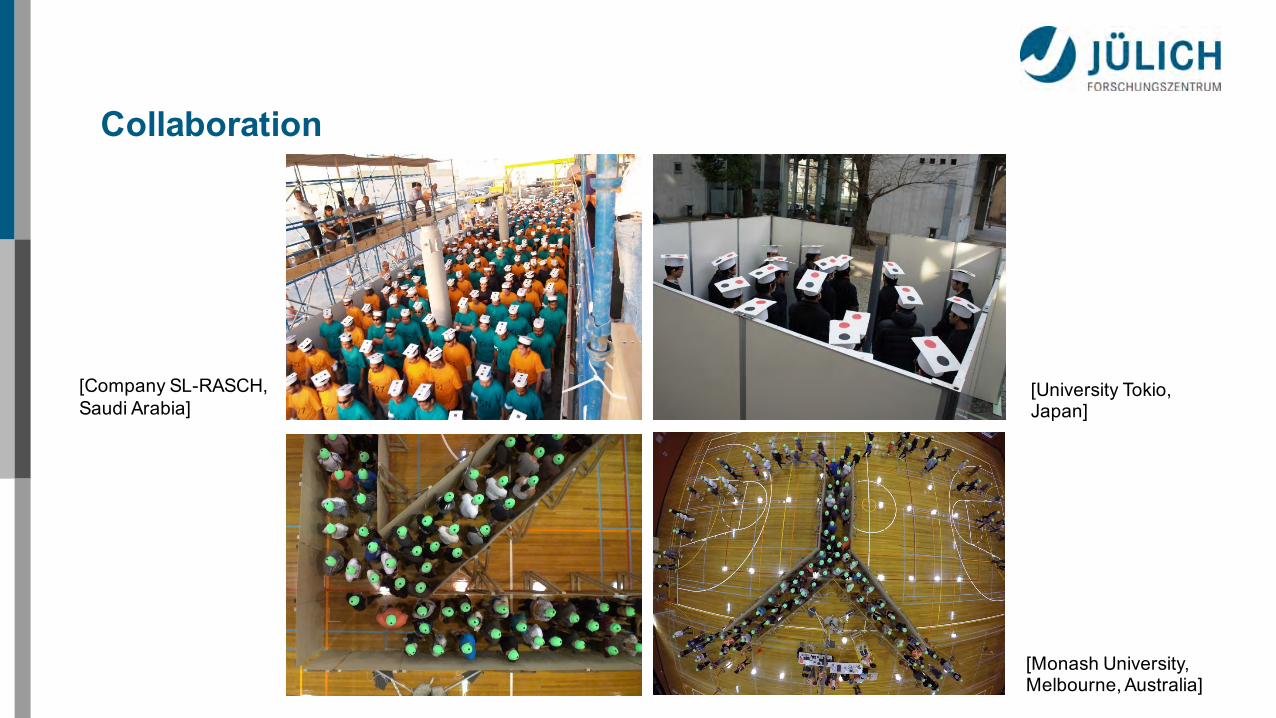
Collaboration
[Company SL-RASCH, Saudi Arabia]
[University Tokio, Japan]
[Monash University, Melbourne, Australia]


Chowpatty beach, Mumbai, India [J. Sorabjee, Urban Design Res. Inst.]


















