Pattern Recognition
33
Pattern Recognition and Machine Learning Eunho Lee 2017-01-03(Tue) January 8, 2017 1 / 33
-
Upload
eunho-lee -
Category
Data & Analytics
-
view
136 -
download
0
Transcript of Pattern Recognition
Pattern Recognition and Machine Learning
Eunho Lee
2017-01-03(Tue)
January 8, 2017 1 / 33

Outline
1 IntroductionPolynomial Curve FittingProbability TheoryThe Curse of DimensionalityDecision TheoryInformation Theory
2 Appendix C - Properties of MatricesDeterminantsMatrix Derivatives2.3. Eigenvector Equation
January 8, 2017 2 / 33
Introduction
1. Introduction
Input data setx ≡ (x1, · · · , xN)T
Target data sett ≡ (t1, · · · , tN)T
Traning set
Input data set + Target data set
January 8, 2017 3 / 33
Introduction
1. Introduction
Data Set
⇓
Probability Theory
⇓
Decision Theory
⇓
Pattern Recognition
* Probability theory provides aframework for expressing uncentainty
* Decision theory allows us toexploit the probablisticrepresentation in order to makepredictions that are optimal
January 8, 2017 4 / 33
Introduction Polynomial Curve Fitting
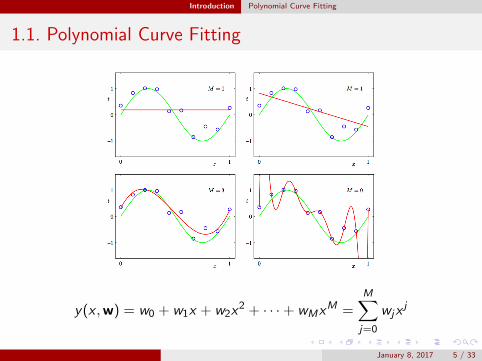
1.1. Polynomial Curve Fitting
y(x ,w) = w0 + w1x + w2x2 + · · ·+ wMxM =
M∑j=0
wjxj
January 8, 2017 5 / 33
Introduction Polynomial Curve Fitting
1.1. Polynomial Curve Fitting1.1.1. Error Functions
Error Function
E (w) =1
2
N∑n=1
{y(xn,w)− tn}2 (1)
Root-mean-square(RMS) error 1
ERMS =√
2E (w∗)/N (2)
* allows us to compare different sizes of data sets* makes same scale as the target variable
1w* is a unique solution of the minimization of the error functionJanuary 8, 2017 6 / 33
Introduction Polynomial Curve Fitting
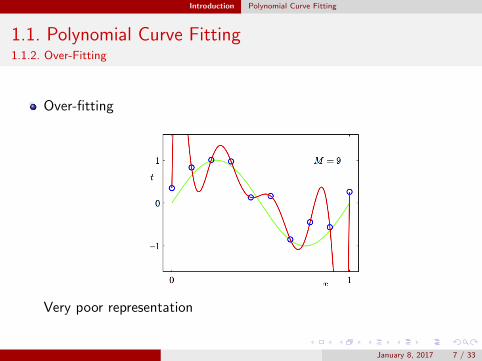
1.1. Polynomial Curve Fitting1.1.2. Over-Fitting
Over-fitting
Very poor representation
January 8, 2017 7 / 33
Introduction Polynomial Curve Fitting
1.1. Polynomial Curve Fitting1.1.3. Modified Error Function
Modified Error Function
E (w) =1
2
N∑n=1
{y(xn,w)− tn}2 +λ
2
∥∥w∥∥2 (3)
prevent the large coefficients w
January 8, 2017 8 / 33
Introduction Probability Theory
1.2. Probability Theory
Sum Rule
p(X ) =∑Y
p(X ,Y )
Product Rulep(X ,Y ) = p(Y | X )p(X )
Bayes’ Theorem
p(Y | X ) =p(X | Y )p(Y )
p(X )
January 8, 2017 9 / 33
Introduction Probability Theory
1.2. Probability Theory
Expectation
E[f ] =∑x
p(x)f (x) ' 1
N
N∑n=1
f (xn)
Variancevar [f ] = E[(f (x)− E[f (x)])2]
January 8, 2017 10 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.1. Two Different Probabilities
1. Frequentiest probability (only for large data set)
p(x) =occurence(x)
N
2. Bayesian probability 2
p(w | D) =p(D | w)p(w)
p(D)
2p(wㅣD): posterior, p(w): prior, p(Dㅣw): likelihood function, p(D): evidenceJanuary 8, 2017 11 / 33

Introduction Probability Theory
1.2. Probability Theory1.2.2. The Gaussian Distribution
The Gaussian distribution (single real-valued variable x)
N(x | µ, σ2) =1
(2πσ2)1/2exp{− 1
2σ2(x − µ)2}
The Gaussian distribution (D-dimensional vector x)
N(x | µ,Σ) =1
(2π)D/2 |Σ|1/2exp{−1
2(x− µ)TΣ−1(x− µ)}
where µ is mean and σ2 is variance
January 8, 2017 12 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.2. The Gaussian Distribution
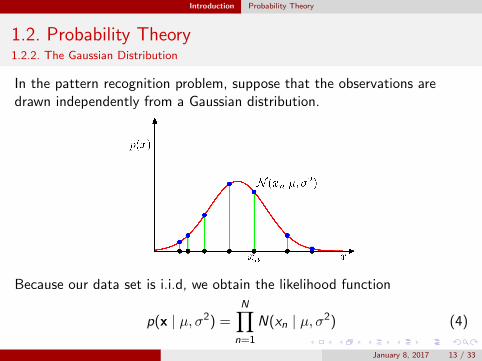
In the pattern recognition problem, suppose that the observations aredrawn independently from a Gaussian distribution.
Because our data set is i.i.d, we obtain the likelihood function
p(x | µ, σ2) =N∏
n=1
N(xn | µ, σ2) (4)
January 8, 2017 13 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.2. The Gaussian Distribution
Our goal is to find µML, σ2ML which maximize the likelihood function (4).
Take log for convenience,
ln p(x | µ, σ2) = − 1
2σ2
N∑n=1
(xn − µ)2 − N
2lnσ2 − N
2ln (2π) (5)
From (5) with respect to µ,
µML =1
N
N∑n=1
xn (sample mean)
Similarly, with respect to σ2,
σ2ML =1
N
N∑n=1
(xn − µML)2 (sample variance)
January 8, 2017 14 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.2. The Gaussian Distribution
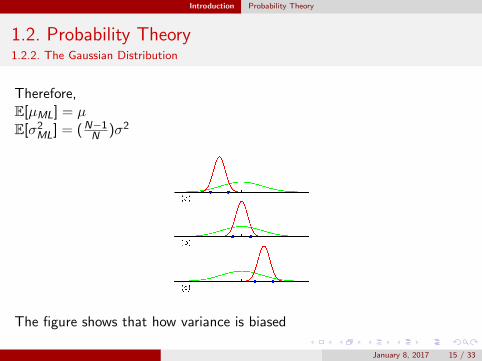
Therefore,E[µML] = µE[σ2ML] = (N−1
N )σ2
The figure shows that how variance is biased
January 8, 2017 15 / 33
Introduction Probability Theory
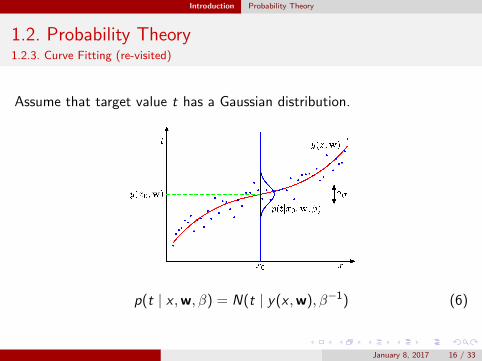
1.2. Probability Theory1.2.3. Curve Fitting (re-visited)
Assume that target value t has a Gaussian distribution.
p(t | x ,w, β) = N(t | y(x ,w), β−1) (6)
January 8, 2017 16 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.3. Curve Fitting (re-visited)
Because the data are drawn independently, the likelihood is given by
p(t | x,w, β) =N∏
n=1
N(tn | y(xn,w), β−1) (7)
1. Maximum Likelihood Function MethodOur goal is to maximize the likelihood function (7).Take log for convenience,
ln p(t | x,w, β) = −β2
N∑n=1
{y(xn,w)− tn}2 +N
2lnβ − N
2ln (2π) (8)
January 8, 2017 17 / 33

Introduction Probability Theory
1.2. Probability Theory1.2.3. Curve Fitting (re-visited)
Maximizing (8) with respect to w is equivalent to minimizing thesum-of-squares error function (1)
Maximizing (5) with respect to β gives
1
βML=
1
N
N∑n=1
{y(xn,wML)− tn}2
January 8, 2017 18 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.3. Curve Fitting (re-visited)
2. Maximum Posterior Method (MAP)Using Bayes’ theorem, the posterior is
p(w | x, t, α, β) ∝ p(t | x,w, β)p(w | α) (9)
Let’s introduce a prior
p(w | α) = N(w | 0, α−1I) = (α
2π)(M+1)/2exp{−α
2wTw} (10)
Our goal is to maximize the posterior (9)
January 8, 2017 19 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.3. Curve Fitting (re-visited)
Maximizing {posterior} with respect to w
⇔ Maximizing {p(t | x,w, β)p(w | α)} by (9)
⇔ Minimizing {−ln (p(t | x,w, β)p(w | α))}
⇔ Minimizing[β2
∑Nn=1{y(xn,w)− tn}2 + α
2 wTw − N2 lnβ + N
2 ln (2π)− ln ( α2π )(M+1)/2]
⇔ Minimizing[β2
∑Nn=1{y(xn,w)− tn}2 + α
2 wTw]
is equivalent to minimizing the modified error function (3) where λ = αβ
January 8, 2017 20 / 33
Introduction Probability Theory
1.2. Probability Theory1.2.4. Bayesian Curve Fitting
Our goal is to predict t, therefore evaluate the predictive distribution.
p(t | x , x, t) =
∫p(t | x ,w)p(w | x, t)dw (11)
The predictive distribution (11)’s RHS can be performed analytically of theform
p(t | x , x, t) = N(t | m(x), s2(x))
where the mean and variance are given by
m(x) = βø(x)TSN∑
n=1
ø(xn)tn
s2(x) = β−1 + ø(x)TSø(x)
January 8, 2017 21 / 33
Introduction The Curse of Dimensionality
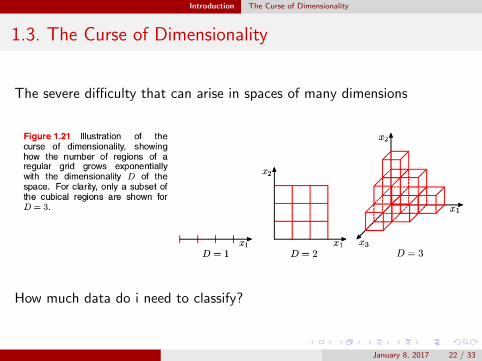
1.3. The Curse of Dimensionality
The severe difficulty that can arise in spaces of many dimensions
How much data do i need to classify?
January 8, 2017 22 / 33
Introduction Decision Theory
1.4. Decision Theory1.4.1. Minimizing the misclassification rate
Rk is decision regions, Ck is k-th class
The boundaries between decision regions are called decisionboundaries
Each decision region need not be contiguous
Classify x to Cm which maximize p(x ,Ck)
January 8, 2017 23 / 33
Introduction Decision Theory
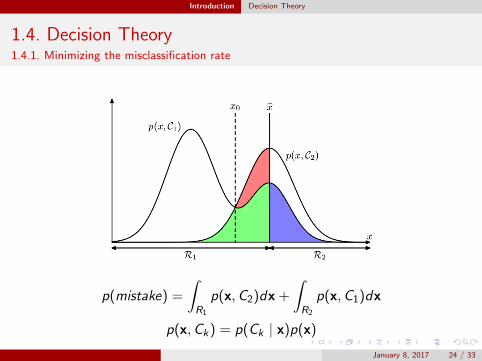
1.4. Decision Theory1.4.1. Minimizing the misclassification rate
p(mistake) =
∫R1
p(x,C2)dx +
∫R2
p(x,C1)dx
p(x,Ck) = p(Ck | x)p(x)
January 8, 2017 24 / 33
Introduction Decision Theory
1.4. Decision Theory1.4.2. Minimizing the expected loss
Dicision’s value is different each other
Minimize the expected loss by using the loss matrix L
E[L] =∑k
∑j
∫Rj
Lkjp(x,Ck)dx
January 8, 2017 25 / 33
Introduction Decision Theory
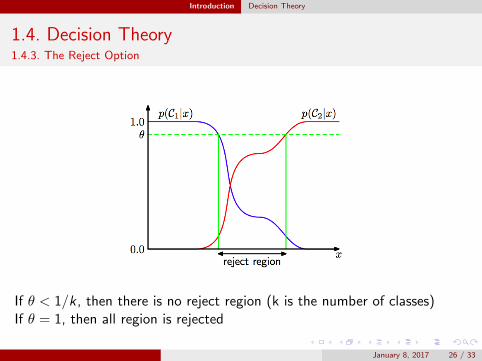
1.4. Decision Theory1.4.3. The Reject Option
If θ < 1/k , then there is no reject region (k is the number of classes)If θ = 1, then all region is rejected
January 8, 2017 26 / 33
Introduction Information Theory
1.5. Infomation Theory
Entropy of the event x (the quantity of information)
h(x) = −log2p(x)
Entropy of the random variable x
H[x ] = −∑x
p(x)log2p(x)
The distribution that maximizes the differential entropy is theGaussian
January 8, 2017 27 / 33

Appendix C - Properties of Matrices
2. Appendix C - Properties of Matrices
Determinants
Matrix Derivatives
Eigenvector Equation
January 8, 2017 28 / 33
Appendix C - Properties of Matrices Determinants
2.1. Determinants
If A and B are matrices of size N ×M, then∣∣∣IN + ABT∣∣∣ =
∣∣∣IM + ATB∣∣∣
A useful special case is ∣∣∣IN + abT∣∣∣ = 1 + aTB
where a and b are N-dimensional column vectors
January 8, 2017 29 / 33
Appendix C - Properties of Matrices Matrix Derivatives
2.2. Matrix Derivatives
1. ∂∂x (xTa) = ∂
∂x (aTx) = a
2. ∂∂x (AB) = ∂A
∂x B + A∂B∂x
3. ∂∂x (A−1) = −A−1 ∂A
∂x A−1
4. ∂∂ATr(AB) = BT
5. ∂∂ATr(A) = I
January 8, 2017 30 / 33
Appendix C - Properties of Matrices Eigenvector Equation
2.3. Eigenvector Equation
For a square matrix A, the eigenvector equation is defined by
Aui = λiui
where ui is an eigenvector and λi is the corresponding eigenvalue
January 8, 2017 31 / 33
Appendix C - Properties of Matrices Eigenvector Equation
2.3. Eigenvector Equation
If A is diagonalized, we can say that
A = UΛUT
By using that equation, we obtain
1. |A| =∏M
i=1 λi
2. Tr(A) =∑M
i=1 λi
January 8, 2017 32 / 33
Appendix C - Properties of Matrices Eigenvector Equation
2.3. Eigenvector Equation
1. The eigenvalues of symmetirc matrices are real
2. The eigenvectors ui statisfies
uTi uj = Iij
January 8, 2017 33 / 33