
Part 1: The 2D projective plane and it’s applications Martin Jagersand CMPUT 613 Non-Euclidean...
53
Part 1: Part 1: The 2D projective The 2D projective plane and it’s plane and it’s applications applications Martin Jagersand Martin Jagersand CMPUT 613 Non-Euclidean Geometry for Computer Vision
-
date post
19-Dec-2015 -
Category
Documents
-
view
224 -
download
3
Transcript of Part 1: The 2D projective plane and it’s applications Martin Jagersand CMPUT 613 Non-Euclidean...

Part 1:Part 1:
The 2D projective plane and The 2D projective plane and it’s applicationsit’s applications
Martin JagersandMartin Jagersand
CMPUT 613Non-Euclidean Geometry
forComputer Vision

Why geometry?
X
Y
Z
HZ
Xx
=
x
y
Scene structureImage structure
= =
x
X
X
YfZ
Richard Hartley and Andrew Zisserman, Multiple View Geometry, Cambridge University Publishers, 2nd ed. 2004
2D Geometry readings: Ch1: Cursorly
Ch 2.1-4, 2.7, Ch 4.1-4.2.5, 4.4.4-4.8 cursorly

Modeling from images
Cam
era(
s)
Scene structure ImageImage
StructureWorld
model-based renderingimage-based modeling
image-based rendering
Tra
ckin
g &
SF
M
Cam
era(
s)
What 2d and 3d representations best support this process?

Euclidean Geometry?
• Is Euclidean geometry needed?Is Euclidean geometry needed? RenderingRendering: requires only model : requires only model reprojectionreprojection
RoboticsRobotics: control via image feature alignments: control via image feature alignments

•Rendering: Rendering: pixel reprojectionpixel reprojection
•Robotics: Robotics: visual servoingvisual servoing
Euclidean model needed?

Euclidean Geometry?
• Is Euclidean geometry needed?Is Euclidean geometry needed? RenderingRendering: requires model : requires model reprojectionreprojection
RoboticsRobotics: control via image feature alignments: control via image feature alignments
•Euclidean model: Euclidean model: ++ describes the real world of objects/scenes describes the real world of objects/scenes
++ quite natural for most people to work with quite natural for most people to work with (everyday relationships, angles, distances, …)(everyday relationships, angles, distances, …)
- difficult to extract from images- difficult to extract from images (camera is not a Euclidean measuring device)(camera is not a Euclidean measuring device)
x
yX
YfZ=
nonlinear…
X
Y
Z

What images don’t provide
Rendering’s inverseRendering’s inverse
lengths
depth

What images don’t provide
Multiple views…
left
right

What images don’t provide
Multiple views…
left
right
above
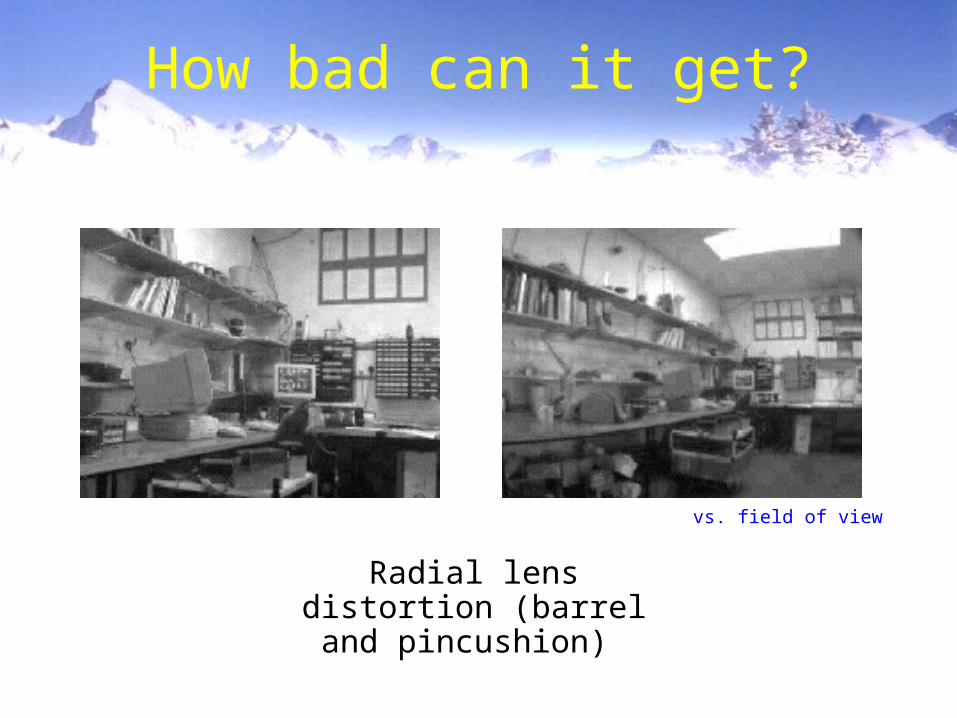
How bad can it get?
Radial lens distortion (barrel and pincushion)
vs. field of view

Correcting Lens Distortion
Distortion model
Parameter estimation
reference features
“corrected” image
Tsai ’87; Brand, Mohr, Bobet ’94

X
Y
Z
Homogeneous coordinates
X
Y
Z
s
s 0
X∞
X
Y
0
X∞ =
• Perspective imaging models 2d projective space
• Each 3D ray is a point in P2 : homogeneous coords.
• Ideal points
• P2 is R2 plus a “line at infinity” l∞
The 2D projective plane
Projective point
l∞
x
yX
Y1Z= Inhomogeneou
s equivalent

Lines
HZ • Ideal line ~ the plane parallel to the image
A
B
C
l =X=lTX = XTl = AX + BY + CZ = 0
l∞ =
0
0
1
• Projective line ~ a plane through the origin
For any 2d projective property, a dual property holds when the role of points and lines are interchanged.
Duality:
X
Y
0
X∞ =
l1 l2X =X1 X2=l
The line joining two points The point joining two lines
X
Y
Z
X
l“line at infinity
”
AX + BY + C = 0

Conics
•Conic: Conic: – Euclidean geometry: hyperbola, ellipse, parabola & degenerateEuclidean geometry: hyperbola, ellipse, parabola & degenerate– Projective geometry: equivalent under projective transformProjective geometry: equivalent under projective transform– Defined by 5 pointsDefined by 5 points
•Tangent lineTangent line
•Dual conic C*Dual conic C*
0
022
xx C
feydxcybxyaxT
fed
ecb
dba
C
2/2/
2/2/
2/2/
xl C
0* ll CT
inhomogeneous
homogeneous

Projective transformations
• Homographies, collineations, projectivitiesHomographies, collineations, projectivities
• 3x3 nonsingular H3x3 nonsingular H
3
2
1
333231
232221
131211
3
2
1
'
'
'
x
x
x
hhh
hhh
hhh
x
x
x
l0= Hà Tl
xTl = 0 x0Tl0= 0
maps P2 to P2
8 degrees of freedomdetermined by 4 corresponding points
x0= Hx• Transforming Lines?subspaces preserved:pts on line remain on line
xTHTHà Tl = 0substitution
dual transformationxTHTl0= 0

Planar Projective Warping
HZA novel view rendered via
four points with known structurexi
0= Hxii = 1. . .4
xi xi0

Planar Projective Warping
HZOriginal Top-down Facing right
Artifacts are apparent where planarity is violated...

2d Homographies
2 images of a plane
2 images from the same viewpoint (Perspectivity)

Panoramic imagingAppl: Quicktime VR, robot navigation etc.
Homographies of the world, unite!

Image mosaics
HZ
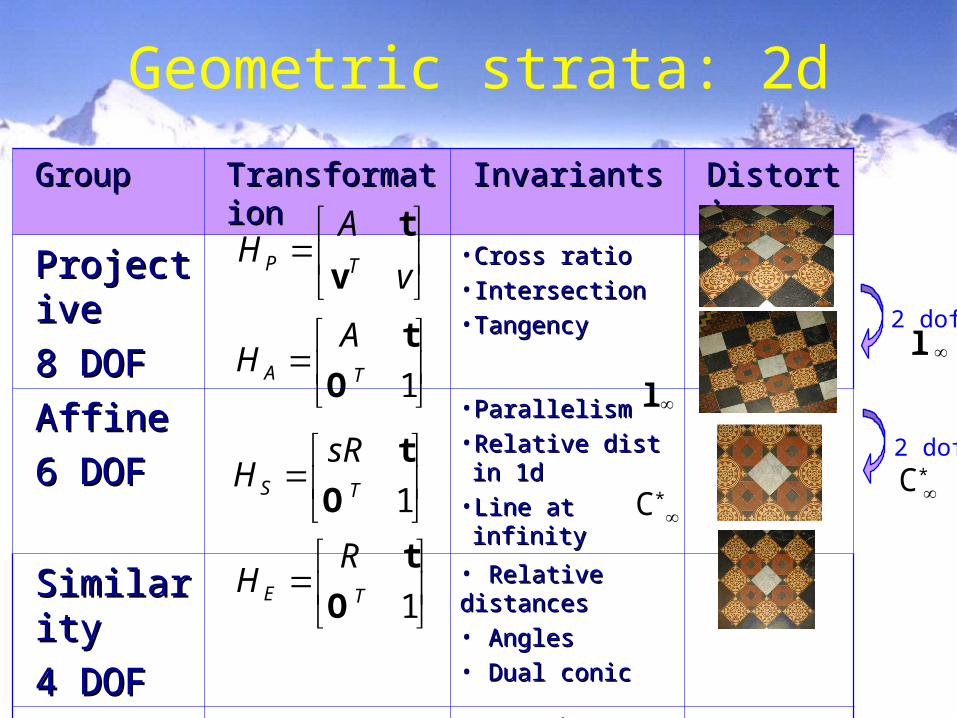
GroupGroup TransformationTransformation InvariantsInvariants DistortionDistortion
ProjectiveProjective
8 DOF8 DOF
• Cross ratioCross ratio
• IntersectionIntersection
• TangencyTangency
AffineAffine
6 DOF6 DOF
• ParallelismParallelism
• Relative dist in 1dRelative dist in 1d
• Line at infinityLine at infinity
SimilaritySimilarity
4 DOF4 DOF
• Relative distancesRelative distances
• AnglesAngles
• Dual conicDual conic
EuclideanEuclidean
3 DOF3 DOF
• LengthsLengths
• AreasAreas
Geometric strata: 2d
1TS
sRH
O
t
1TA
AH
O
t
1TE
RH
O
t
v
AH TP v
t
C*
2 dofl
2 dof
l
C*

The line at infinity
l
1
0
0
1t
0ll
TT
TT
A
AH A
HZ 2:17: The line at infinity l is a fixed line under a projective transformation H if and only if H is an
affinity
Note: But points on l can be rearranged to new points on l

Affine properties from images
Projection(Imaging)
RectificationPost-processing

Affine rectification
v1 v2
l1
l2 l4
l3
l∞21 vvl
211 llv 432 llv
APA
lll
HH
321
010
001
0,l 3321 llll T
Point transformation for Aff Rect:
Exercise: Verify
T321 lll
TT ]1,0,0[321 lllTPAH

Math tools 1:Solving Linear Systems
• If If mm == nn ( (AA is a square matrix), then we can obtain is a square matrix), then we can obtain the solution by simple inversion:the solution by simple inversion:
• If If mm >> nn, then the system is , then the system is over-constrainedover-constrained and and
AA is not invertible is not invertible – Use Matlab “\” to obtain Use Matlab “\” to obtain least-squares solutionleast-squares solution xx == A\b A\b to to Ax Ax
=b =b internally Matlab uses QR-factorization (cmput340) to solve this.internally Matlab uses QR-factorization (cmput340) to solve this. – Can also write this using pseudoinverse Can also write this using pseudoinverse AA+ + == ((AATTAA))-1-1AATT to obtain to obtain
least-squares solutionleast-squares solution xx == A A++bb

Fitting Lines
• A 2-D point A 2-D point xx = ( = (xx, , yy)) is on a line with slope is on a line with slope
mm and intercept and intercept bb if and only if if and only if yy = = mxmx + + bb • Equivalently,Equivalently,
• So the line defined by two points So the line defined by two points xx11, , xx22 is the is the
solution to the following system of equations:solution to the following system of equations:

Fitting Lines
• With more than two points, there is no guarantee With more than two points, there is no guarantee that they will all be on the same linethat they will all be on the same line
• Least-squares solution obtained from Least-squares solution obtained from pseudoinverse is line that is “closest” to all of the pseudoinverse is line that is “closest” to all of the pointspoints
courtesy ofVanderbilt U.

Example: Fitting a Line
• Suppose we have points Suppose we have points (2, 1)(2, 1), , (5, 2)(5, 2), , (7, (7, 3)3), and , and (8, 3)(8, 3)
• Then Then
and and x x == A A++b b == (0.3571, 0.2857)(0.3571, 0.2857)TT
Matlab: Matlab: x x == A\b A\b

Example: Fitting a Line

Homogeneous Systems of Equations
• Suppose we want to solve Suppose we want to solve AA x = 0x = 0• There is a trivial solution There is a trivial solution x = 0x = 0, but we don’t want , but we don’t want
this. For what other values of this. For what other values of xx is is AA xx close to close to 00??• This is satisfied by computing the This is satisfied by computing the singular value singular value
decompositiondecomposition (SVD) (SVD) A A == UDV UDVTT (a non- (a non-negative diagonal matrix between two orthogonal negative diagonal matrix between two orthogonal matrices) and taking matrices) and taking xx as the last column of as the last column of VV– Note that Matlab returns Note that Matlab returns [U, D, V] = svd(A)[U, D, V] = svd(A)

Line-Fitting as a Homogeneous System
• A 2-D homogeneous point A 2-D homogeneous point xx = ( = (xx, , yy, 1), 1)TT is on is on
the line the line ll = ( = (aa, , bb, , cc))TT only when only when
axax + + byby + + cc = 0 = 0• We can write this equation with a dot product: We can write this equation with a dot product:
x•x• ll = 0 = 0,, and hence the following system is and hence the following system is
implied for multiple points implied for multiple points xx11,, x x22, ..., , ..., xxnn::

Example: Homogeneous Line-Fitting
• Again we have 4 points, but now in homogeneous form: Again we have 4 points, but now in homogeneous form:
(2, 1, 1)(2, 1, 1), , (5, 2, 1)(5, 2, 1), , (7, 3, 1)(7, 3, 1), and , and (8, 3, 1)(8, 3, 1)• Our system is:Our system is:
• Taking the SVD of Taking the SVD of AA, we get:, we get:compare to x = (0.3571, 0.2857)T

Parameter estimation in geometric transforms
•2D homography2D homographyGiven a set of (xGiven a set of (xii,x,xii’), compute H (x’), compute H (xii’=Hx’=Hxii))
•3D to 2D camera projection3D to 2D camera projectionGiven a set of (XGiven a set of (Xii,x,xii), compute P (x), compute P (xii=PX=PXii))
•Fundamental matrixFundamental matrixGiven a set of (xGiven a set of (xii,x,xii’), compute F ’), compute F (x(xii’’TTFxFxii=0)=0)
•Trifocal tensor Trifocal tensor Given a set of (xGiven a set of (xii,x,xii’,x’,xii”), compute T”), compute T
Now

Estimating Homography Hgiven image points x
HZA novel view rendered via
four points with known structurexi
0= Hxii = 1. . .4
xi xi0

Number of measurements required
• At least as many independent equations as degrees of At least as many independent equations as degrees of freedom requiredfreedom required
• Example: Example:
Hxx'
1'
λ
333231
232221
131211
y
x
hhh
hhh
hhh
w
y
x
2 independent equations / point8 degrees of freedom
4x2≥8

Approximate solutions
•Minimal solutionMinimal solution4 points yield an exact solution for H4 points yield an exact solution for H
•More pointsMore points– No exact solution, because measurements are inexact No exact solution, because measurements are inexact
(“noise”)(“noise”)– Search for “best” according to some cost functionSearch for “best” according to some cost function– Algebraic or geometric/statistical costAlgebraic or geometric/statistical cost

Many ways to solve:
Different Cost functions => differencesDifferent Cost functions => differencesin solution in solution
•Algebraic distanceAlgebraic distance
•Geometric distanceGeometric distance
•Reprojection errorReprojection error
•ComparisonComparison
•Geometric interpretationGeometric interpretation

Gold Standard algorithm
•Cost function that is optimal for some Cost function that is optimal for some assumptionsassumptions
•Computational algorithm that minimizes it is Computational algorithm that minimizes it is called “Gold Standard” algorithm called “Gold Standard” algorithm
•Other algorithms can then be compared to itOther algorithms can then be compared to it

Estimating H: The Direct Linear Transformation (DLT) Algorithm
• xxi i =H=HXXii is an equation involving homogeneous is an equation involving homogeneous
vectors, so vectors, so HHXXii and and xxi i need only be in the same need only be in the same
direction, not strictly equaldirection, not strictly equal
• We can specify “same directionality” by using a We can specify “same directionality” by using a cross product formulation:cross product formulation:
0Hxx ii

Direct Linear Transformation(DLT)
ii Hxx 0Hxx ii
i
i
i
i
xh
xh
xh
Hx3
2
1
T
T
T
iiii
iiii
iiii
ii
yx
xw
wy
xhxh
xhxh
xhxh
Hxx12
31
23
TT
TT
TT
0
h
h
h
0xx
x0x
xx0
3
2
1
TTT
TTT
TTT
iiii
iiii
iiii
xy
xw
yw
Tiiii wyx ,,x
0hA i

Direct Linear Transformation(DLT)
• Equations are linear in Equations are linear in hh
0
h
h
h
0xx
x0x
xx0
3
2
1
TTT
TTT
TTT
iiii
iiii
iiii
xy
xw
yw
0hA i
• Only 2 out of 3 are linearly independent Only 2 out of 3 are linearly independent
(indeed, 2 eq/pt)(indeed, 2 eq/pt)
0
h
h
h
x0x
xx0
3
2
1
TTT
TTT
iiii
iiii
xw
yw
(only drop third row if wi’≠0)• Holds for any homogeneous representation, Holds for any homogeneous representation,
e.g. (e.g. (xxii’,’,yyii’,1)’,1)

Direct Linear Transformation(DLT)
•Solving for Solving for HH
0Ah 0h
A
A
A
A
4
3
2
1
size A is 8x9 or 12x9, but rank 8
Trivial solution is h=09T is not interesting
1-D null-space yields solution of interestpick for example the one with 1h

Direct Linear Transformation(DLT)
•Over-determined solutionOver-determined solution
No exact solution because of inexact measurementi.e. “noise”
0Ah 0h
A
A
A
n
2
1
Find approximate solution- Additional constraint needed to avoid 0, e.g.
- not possible, so minimize
1h Ah0Ah

DLT algorithm
ObjectiveGiven n≥4 2D to 2D point correspondences {xi↔xi’}, determine the 2D homography matrix H such that xi’=Hxi
Algorithm
(i) For each correspondence xi ↔xi’ compute Ai. Usually only two first rows needed.
(ii) Assemble n 2x9 matrices Ai into a single 2nx9 matrix A
(iii) Obtain SVD of A. Solution for h is last column of V
(iv) Determine H from h (reshape)

Inhomogeneous solution
'
'h~
''000'''
'''''000
ii
ii
iiiiiiiiii
iiiiiiiiii
xw
yw
xyxxwwwywx
yyyxwwwywx
Since h can only be computed up to scale, pick hj=1, e.g. h9=1, and solve for 8-vector
h~
Solve using Gaussian elimination (4 points) or using linear least-squares (more than 4 points)
However, if h9=0 this approach fails also poor results if h9 close to zeroTherefore, not recommended for general homographiesNote h9=H33=0 if origin is mapped to infinity
0
1
0
0
H100Hxl 0
T

Normalizing transformations
• Since DLT is not invariant to coordinate Since DLT is not invariant to coordinate transforms, what is a good choice of transforms, what is a good choice of coordinates?coordinates?e.g.e.g.– Translate centroid to originTranslate centroid to origin– Scale to a average distance to the originScale to a average distance to the origin– Independently on both imagesIndependently on both images
2
1
norm
100
2/0
2/0
T
hhw
whwOr

Normalized DLT algorithm
ObjectiveGiven n≥4 2D to 2D point correspondences {xi↔xi’}, determine the 2D homography matrix H such that xi’=Hxi
Algorithm
(i) Normalize points
(ii) Apply DLT algorithm to
(iii) Denormalize solution
,x~x~ ii inormiinormi xTx~,xTx~
norm-1
norm TH~
TH

Importance of normalization
0
h
h
h
0001
1000
3
2
1
iiiiiii
iiiiiii
xyxxxyx
yyyxyyx
~102 ~102 ~102 ~102 ~104 ~104 ~10211
orders of magnitude difference!

Degenerate configurations
x4
x1
x3
x2
x4
x1
x3
x2H? H’?
x1
x3
x2
x4
0Hxx iiConstraints: i=1,2,3,4
TlxH 4* Define:
4444* xxlxxH kT
3,2,1 ,0xlxxH 4* iii
TThen,
H* is rank-1 matrix and thus not a homography
(case A) (case B)
If H* is unique solution, then no homography mapping xi→xi’(case B)
If further solution H exist, then also αH*+βH (case A) (2-D null-space in stead of 1-D null-space)

short and long focal length
Radial Distortion

Radial Distortion

Radial Distortion

Correction of distortion
Choice of the distortion function and center
Computing the parameters of the distortion function(i) Minimize with additional unknowns(ii) Straighten lines(iii) …
Radial Distortion


















