Page 1 of 62 - University of Southern Queensland · Page 16 of 62 Following is an extract from the...
62
_____________________________________________________________________________________ Page 1 of 62
Transcript of Page 1 of 62 - University of Southern Queensland · Page 16 of 62 Following is an extract from the...

_____________________________________________________________________________________ Page 1 of 62

_____________________________________________________________________________________ Page 2 of 62
University of Southern Queensland
Faculty of Engineering and Surveying
Critical Review of Techniques for
Rigid Spoolpiece Metrology
Observation and Reduction
A dissertation submitted by
Mr. Jason Falken
In fulfilment of the requirements of
Course ENG4111 & ENG4112 Research Project
Bachelor of Surveying
27th October 2005

_____________________________________________________________________________________ Page 3 of 62
ABSTRACT
The dissertation investigated the current procedure and techniques used for subsea rigid
spoolpiece metrology. There was a clear need to quantify sources of error, correct use
and application of measurements taken, effects of sensor accuracy and precision on final
reductions and the adequacy of the existing techniques.
The research was based, for paradigmatic and illustrative purposes, on an actual project
undertaken by the author for the sponsor-company.
The research-intensive dissertation drew heavily on the quality of the available
literature. The literature review was thus a major undertaking of the dissertation. The
method was to research and review the appropriate available literature, and determine
the requirements, aims, techniques and problems associated with a typical metrology
project.
An analysis was drawn of the compiled information, highlighting the best techniques
and discussing methods of improvement. The research outcome was thus a scientific
review of the industry standard techniques and a presentation of justified alternatives for
rigid spoolpiece metrology based on a theoretical analysis of the researched
information.
In essence however, the findings of the dissertation are that there are no major methods
of improving techniques. A major finding was that there is much opportunity for further
research and the development and application of new technologies.

DISCLAIMER PAGE
University of Southern Queensland
Faculty of Engineering and Surveying
_____________________________________________________________________________________ Page 4 of 62
ENG4111 & ENG4112 Research Project
Limitations of Use
The Council of the University of Southern Queensland, its Faculty of Engineering and
Surveying, and the staff of the University of Southern Queensland, do not accept any
responsibility for the truth, accuracy or completeness of material contained within or
associated with this dissertation.
Persons using all or any part of this material do so at their own risk, and not at the risk
of the Council of the University of Southern Queensland, its Faculty of Engineering and
Surveying or the staff of the University of Southern Queensland.
This dissertation reports an educational exercise and has no purpose or validity beyond
this exercise. The sole purpose of the course pair entitled "Research Project" is to
contribute to the overall education within the student’s chosen degree programme. This
document, the associated hardware, software, drawings, and other material set out in the
associated appendices should not be used for any other purpose: if they are so used, it is
entirely at the risk of the user.
Prof G Baker
Dean
Faculty of Engineering and Surveying

_____________________________________________________________________________________ Page 5 of 62
CANDIDATES CERTIFICATION
I certify that the ideas, designs and experimental work, results, analysis and conclusions
set out in this dissertation are entirely my own efforts, except where otherwise indicated
and acknowledged.
I further certify that the work is original and has not been previously submitted for
assessment in any other course or institution, except where specifically stated.
FALKEN, Jason Floyd
Student Number: 0031138002
27th October 2005

_____________________________________________________________________________________ Page 6 of 62
ACKNOWLEDGEMENTS
This research was carried out under the principal supervision of:
A/Prof. Frank Young, USQ Staff member
Appreciation is also due to:
Mr Tim Farrow, Subsea7 Ltd Aberdeen
Special thanks for project sponsorship to:
Subsea7 Ltd, Aberdeen

_____________________________________________________________________________________ Page 7 of 62
TABLE OF CONTENTS
Contents Page
ABSTRACT 3
DISCLAIMER 4
CANDIDATES CERTIFICATION 5
ACKNOWLEDGEMENTS 6
TABLE OF CONTENTS 7
LIST OF FIGURES 11
LIST OF TABLES 12
LIST OF APPENDICES 13
ABBREVIATIONS 14
CHAPTER 1 - INTRODUCTION
1.1 Outline of the study 15
1.2 Introduction 15
1.3 The problem 19
1.4 Research objectives 19
1.5 Methodology 19
1.5 Conclusion: chapter 1 21
CHAPTER 2 - LITERATURE REVIEW
2.1 Introduction 22
2.2 Review specifics 22
2.2.1 Introduction to metrology and the work environment 22
2.2.2 Metrology dataset requirements and mathematical procedure 23
2.2.3 Environmental and instrument sources of error 24
2.2.4 Typical tolerance requirements 25
2.4 Conclusion: chapter 2 25

_____________________________________________________________________________________ Page 8 of 62
CHAPTER 3 – RESEARCHED INFORMATION REVIEW
3.1 Introduction 26
3.2 Resource analysis 26
3.3 Consequential effects 26
3.4 Minimum dataset 27
3.4.1 Horizontal angle between hub and spool 27
3.4.1.1 Structure heading 27
3.4.1.2 Spool heading 27
3.4.2 Hub-hub vertical difference 29
3.4.3 Hub inclination 29
3.4.4 Hub-hub baseline 31
3.4.5 Offsets 31
3.4.5.1 ROV sensor offsets 31
3.4.5.2 Compatt sensor and base-plate offsets 32
3.4.5.3 Structure dimensional control 33
3.5 Further mathematical considerations 35
3.6 Instrumentation: requirements, accuracies and precisions 35
3.6.1 Horizontal angle between hub and spool 36
3.6.1.1 Structure heading 36
3.6.1.2 Spool heading 37
3.6.2 Hub-hub vertical difference 41
3.6.3 Hub inclination 41
3.6.4 Hub-hub baseline 42
3.6.5 Offsets 42
3.7 Sources of error: effects and solutions 43
3.7.1 Inclinometer to base-plate error 43
3.7.2 Acoustic errors 43
3.7.2.1 Acoustic range resolution 43
3.7.2.2 Timing accuracy 45
3.7.2.3 Speed of sound uncertainty 45
3.7.2.4 Ray refraction effects 48
3.7.3 Heading errors 48
3.7.4 Tidal variation 49
3.7.5 Instrument drift, alignment errors, rounding errors, etc 50
3.8 Metrology tolerances 50

_____________________________________________________________________________________ Page 9 of 62
3.9 Data redundancy and error reduction techniques 50
3.9.1 Horizontal angle between hub and spool 50
3.9.1.1 Structure heading 50
3.9.1.2 Spool heading 51
3.9.2 Hub-hub vertical difference 51
3.9.3 Hub inclination 51
3.9.4 Hub-hub baseline 52
3.10 Conclusion: chapter 3 52
CHAPTER 4 – ANALYSIS
4.1 Introduction 53
4.2 Critical analysis of metrology techniques 53
4.2.1 Horizontal angle between hub and spool 53
4.2.1.1 Structure heading 53
4.2.1.2 Spool heading 54
4.2.2 Hub-hub vertical difference 54
4.2.3 Hub inclination 55
4.2.4 Hub-hub baseline 55
4.2.5 Offsets 56
4.3 Conclusion: chapter 4 56
CHAPTER 5 - CONCLUSIONS, DISCUSSIONS AND IMPLICATIONS
5.1 Introduction 57
5.2 Discussion 57
5.2.1 Limited technology options 57
5.2.2 Adequacy of current techniques 57
5.2.3 High level of skills offshore 58
5.3 Further research and recommendations 58
5.3.1 Dynamic GPS positioning of vessels at sea 58
5.3.2 Alternate offset measurement techniques 58
5.3.3 Alternate Compatt base-plate design 59
5.3.4 Gyrocompass end-cap for Compatts 59
5.3.5 Other new technologies 59
5.4 Conclusion: chapter 5 59

_____________________________________________________________________________________ Page 10 of 62
APPENDICES 60
REFERENCES 62

_____________________________________________________________________________________ Page 11 of 62
LIST OF FIGURES
Number Title Page
FIGURE 1: 3D Baobab field layout 13
FIGURE 2: Drill centre assembly 15
FIGURE 3: Compatt 16
FIGURE 4: Remotely Operated Vehicle 16
FIGURE 5: Top view of structures showing hub to spool alignment 25
FIGURE 6: Longitudinal profile between hubs 26
FIGURE 7: Hub inclinations in the vertical plane: pitch and roll 27
FIGURE 8: Typical ROV sensor offsets 28
FIGURE 9: Compatt, base-plate and hub vertical offsets 29
FIGURE 10: Booking sheet for DCS manifold 31
FIGURE 11: Trial fit of ROV dummy docking bar in DCN manifold 34
FIGURE 12: DCN and DCS array Compatts and baselines 35
FIGURE 13: Super (Ultra) Short Baseline method (SSBL) 37
FIGURE 14: Effects of Compatt transducer position on required baseline 39
FIGURE 15: Sound velocity profile 44
FIGURE 16: Error in heading due to latitude inaccuracy 46
FIGURE 17: Braced quadrilateral between manifold and x-tree 49

_____________________________________________________________________________________ Page 12 of 62
LIST OF TABLES
Number Title Page
TABLE 1: Octans fibre-optic gyrocompass technical performances 33
TABLE 2: Compatt specification 36
TABLE 3: Surface positioning accuracy 38
TABLE 4: Sub-surface positioning accuracy 38
TABLE 5: Specifications for a 2000m rated digiquartz depth sensor 38
TABLE 6: Specifications for a 14,5° Schaevitz LSOP inclinometer 39
TABLE 7: Metrology tolerances 47

_____________________________________________________________________________________ Page 13 of 62
LIST OF APPENDICES
Number Title Page
A Project Specification 61

_____________________________________________________________________________________ Page 14 of 62
ABBREVIATIONS
The following abbreviations have been used throughout the text and bibliography:
C-O Calculated minus Observed
CNR Canadian Natural Resources
COMPATT Computing and Telemetry Transponder
CTDS Conductivity, Temperature, Density & Salinity
C/W Complete with
DCN Drill Centre North
DCS Drill Centre South
DGPS Differential Global Positioning System
EHF Extra High Frequency
FDP Field Development Plan
FPSO Floating Production Storage Offloading
FTA Flowline Termination Assembly
GMT Greenwich Mean Time
GPS Global Positioning System
LAT Lowest Astronomical Tide
LBL Long Baseline
PAN Programmable Acoustic Navigator
PC Personal Computer
PLEM Pipeline End Manifold
PLET Pipeline End Termination
QC Quality Control
SV Sound Velocity
TBC To Be Confirmed
TOUK Technip Offshore United Kingdom
USBL Ultra Short Baseline
WIN Water Injection North
WIS Water Injection South
WGS 84 World Geodetic System 1984
WROV Work-class Remotely Operated Vehicle
X-Tree Tree

CHAPTER 1
1 INTRODUCTION
1.1 Outline of the study The project investigates and quantifies the techniques and reduction methods currently
available and employed in the offshore oil and gas construction environment, for rigid
spoolpiece metrology. The research is based, for paradigmatic and illustrative purposes
only, on an actual project undertaken by the author for the sponsor-company.
As such, the project encompasses:
‘An analysis will be made to quantify sources of error, correct use and
application of measurements taken, effects of sensor accuracy and precision on
final reductions and the adequacy of existing techniques.’
1.2 Introduction The aim of this section is to provide some insight, through an in-depth background, into
the working environment, requirements, necessities and expectations of a metrology
project.
Figure 1: 3D Baobab field layout
_____________________________________________________________________________________ Page 15 of 62

_____________________________________________________________________________________ Page 16 of 62
Following is an extract from the Survey and Positioning Procedure MV Maersk Winner
BAO-TEC-PP-PRO-32935 (08/12/2004):
‘CNR International (Côte d’Ivoire) S.A.R.L. have discovered oil in an
accumulation named Baobab in offshore Côte d’Ivoire Block CI-40 and lies
approximately 65km south-west of Abidjan. Baobab is located some 12km
south-west from CNR’s Espoir field in Block CI-26. CNR’s Partners in the
development are PETROCI Holdings and Svenska Petroleum Exploration A.B.
The Baobab Development is located in 1,000 – 1,700m of water offshore Côte
d’Ivoire some 9km from the continental shelf. The Baobab field is to be
developed using an FPSO moored in deep water (approximately 900m depth).
The seabed is continually sloping and features a steep central canyon in which
the exploration wells Baobab-1X and Baobab-2X are located. However, the
FDP does not include the two exploration wells for production.
Two drilling centres, DCN and DCS are to be located on the canyon west
shoulder in 1,100 to 1,300m water depth from which seven production wells will
be drilled and manifolded. These two drilling centres will be approximately
650m apart and both DCN and DCS will be provided with a six (6) slot
manifold. The current flow assurance work concludes that three 12inch
insulated production flowlines (with a pigging loop per pair of flowlines, located
on both DCN and DCS manifolds) should be employed to convey the produced
fluid from the manifolds to the FPSO, located some 4km from DCN.
All production wells will be gas lifted to maximise production. Testing of wells
is achieved by subsea multiphase meters located on each production manifold.
Water injection providing pressure support and water sweep is required to
improve hydrocarbon recovery by exploiting the reservoir effectively. Two
drilling centres, WIN and WIS are to be located on the easterly flank of the
reservoir in 1,100 to 1,300m water depth from which three (3) water injection
wells will be drilled and manifolded. These two drilling centres will be 3.5km
apart and each will be provided with a four (4) slot manifold. A single 12inch

water injection flowline will supply treated water to each manifold from the
FPSO, located some 4km from WIN.
Flowlines arriving at the FPSO will be terminated by a deep water riser system.
A multiplexed electro-hydraulic subsea control system will be installed to
control and operate the subsea facilities. A single riser umbilical will connect to
two separate umbilicals, one to the production facilities and one to the water
injection facilities.’
Metrology is the term used to describe the series of measurements and calculations
required to produce a 3D spatial relationship between 2 or more subsea structures
(EHXT Hub and Manifold Hub in drawing), used as dimensional offsets for the
production of a connecting structure (Well Jumper in drawing).
The need for subsea measurement exists because the manifold and x-tree (EHXT), as an
example, are installed independently on the seabed to a much poorer accuracy than is
needed for the jumper to fit. As a result, all required dimensions of distance, heights,
bearings and inclinations are affected. The metrology has to be done post installation of
the manifold and EHXT.
The basic requirements of a dual-bore rigid spool (jumper) metrology are horizontal
distance between hubs, height difference between hubs, inclination at each hub, heading
at each hub and bearing of the spool. Dual-bore refers to 2 bore-holes inside the hub,
therefore making relative headings between structures important to align the bores on
the hubs to the end-caps on the spool.
___________________________
Figure 2: Drill centre assembly__________________________________________________________ Page 17 of 62

Due to the accuracy and precision required, the measuring instruments used are high-
end subsea units capable of providing the necessary tolerances. The primary instrument
is the EHF Compatt with digiquartz and inclinometer end-cap. These acoustic
instruments are capable of fulfilling the distance, heighting and inclination requirements
of the dataset.
Figure 3: Compatt
The water depth is far beyond the workable range of divers, so ROV’s are used for all
subsea manipulations. These vehicles provide ideal platforms for mounting survey-rated
sensors for use in high precision metrology measurements. Fibre-optic gyroscopes
(FOG), digiquartz depth sensors, and acoustic transducers (ROVNav) are some of the
crucial metrology-specific sensors mounted on the ROV’s.
_____________________________________________________________________________________ Page 18 of 62
Figure 4: Remotely Operated Vehicle

_____________________________________________________________________________________ Page 19 of 62
Specific sensor uses, techniques and sources of error will be discussed in greater detail
in a later chapter.
1.3 The problem The abstract nature and adverse working environment of a metrology project lends itself
to frequent insitu technique adaptation and improvisation. As a specialist construction
project, it suffers the effects of an industry-driven solution, where time and financial
constraints do not allow for an academic study of the subject. The existing methodology
for such a task thus commonly comprises techniques adapted from conventional survey
and subsea measurement techniques. A scenario thus exists where professionals and
companies have devised their own preferred methods.
1.4 Research objectives This research will firstly quantify and explain the typical dataset and computational
requirements of a basic metrology project, followed by an in-depth analysis of the
techniques and equipment implications available. It is not the intent to find an ultimate
solution, but rather an in-depth analysis of one such project with the aim of improving
techniques or verifying the correct application thereof within the donor-project.
The research will thus present a best practise solution and the justification thereof, for
rigid spoolpiece metrology, based on a theoretical analysis of the researched
information.
The objectives of the dissertation will follow the program methodology as listed in the
Project Specification and is listed as 1-10 in the methodology below.
1.5 Methodology The project is a theoretical analysis of the assembled information and the isolation of a
best practice for rigid spoolpiece metrology. Hence, the method will be to review the
relevant literature, critically assess the options and find the best technique. The
objectives listed below are sequential and in a result-dependent order.

_____________________________________________________________________________________ Page 20 of 62
The first phase will be to research and review the appropriate, available literature. The
sequential steps 1-6 below will achieve this.
1 Briefly review available literature and common practises, with reasoning towards
need for further investigation into techniques.
2 Investigate minimum dataset requirements and determine basic mathematical
procedures for data reduction.
3 Evaluate and review instrumentation requirements and sensor accuracies and
precisions.
4 Research and investigate sources of environmental and instrument error.
5 Research typical tolerance requirements for spoolpiece metrology and fabrication.
6 Critically examine and analyse surveying techniques used for collection of dataset.
The second phase will be to critically assess and analyse the alternatives and find and
justify the best technique. Steps 7-11 are thus the next phase of analysing and
interpreting the data.
7 Investigate and review alternate techniques for measurement of inclinations,
bearing, distance and heighting, with particular emphasis on the effect of network
design for 3D solutions in a least squared adjustment.
8 Investigate and review effects of sources of error on data quality and compliance to
tolerance requirements.
9 Investigate and review techniques for data redundancy and error reduction.
10 Design alternate procedure for collection and reduction of metrology data, if
deemed necessary.
11 Evaluate and analyse outcome of chosen procedure.
The effects of the above, allow the methodology to be simplified and aligned with the
objective list. The flow and progress to project completion will closely follow the
objective sequence. The techniques for generating results and completing each objective
will thus be largely analytical and will rely heavily on the quality and extent of the
literature review.
It can be seen that a major part of the project lies in the research and acquisition of
relevant information. This is the reason for the first objective and its aim of collating

_____________________________________________________________________________________ Page 21 of 62
and reviewing as much information relative to the topic, as is deemed necessary.
Throughout the project, this objective will be revisited on-the-fly, to acquire more
information as the need arises.
A major aspect of the analysis is assurance and quality control. This will be maintained
by interaction, at significant levels within each objective, with institutional support (via
the project supervisor) and industry support (via the associate supervisor and sponsor-
company). This will minimise compound errors and maintain confidence throughout.
1.6 Conclusion: chapter 1 The dissertation aims to investigate current procedure and techniques used for subsea
rigid spoolpiece metrology. The research will use a case-study for comparison and the
procedure and techniques used therein will be analysed.
The research will produce a scientific review of the industry standard techniques and
offer justified alternatives based on the outcome of the research.
The dissertation is research-intensive and will draw heavily on the quality of the
available literature. The literature review is a major undertaking of the dissertation and
will be revised throughout the length of the project.
The outcome of the study will clarify and justify appropriate procedure and techniques
for rigid spoolpiece metrology.

_____________________________________________________________________________________ Page 22 of 62
CHAPTER 2
2 LITERATURE REVIEW
2.1 Introduction Chapter 1 identified the need for an in-depth literature review to investigate current
procedure and techniques used for subsea rigid spoolpiece. The discovery and review of
this information is a major undertaking of the project. All analysis and conclusions will
draw heavily from the quality and availability of this information.
Each objective as discussed in chapter 1.4 and 1.5 requires specific research. The
literature review is thus a continuous task to supply this data and search for new and
relevant information.
This chapter outlines the findings and relevance of all literature reviewed and used in
this dissertation.
2.2 Review specifics The literary review is addressed according to specific requirements as set out in the
project objective list. These requirements are headed below with significant reviews
sequentially listed.
Due to the adverse nature of the topic, not much specific information was available
through libraries (USQ Library and others). As a result, the majority of the literary
resources used were sourced through the sponsor company and other offshore
construction service-provider companies.
2.2.1 Introduction to metrology and the work environment
Survey and Positioning Procedure MV Maersk Winner BAO-TEC-PP-PRO-
32935 (08/12/2004)
An extract can be viewed in 1.1 and serves as a layman’s introduction to
the marine environment and metrology. The passage is self explanatory.

_____________________________________________________________________________________ Page 23 of 62
Introduction to Physical Oceanography (2002)
This textbook served as a brief introduction and reference to the
technical terms and environmental conditions of the marine environment.
It is not a major contributor to this dissertation, but is invaluable as a
reference text.
2.2.2 Metrology dataset requirements and mathematical procedure
Flexible and Rigid Spoolpiece Metrology Procedure BAO-TEC-PP-PRO-32932
(08/12/2004), sec. 2.4
The Scope of Work as defined in the procedure for the case-study
provides an overview of the procedure required and expected outcomes
of a typical metrology project. The dissertation will investigate the
adequacy and relevance of this procedure.
Flexible and Rigid Spoolpiece Metrology Procedure BAO-TEC-PP-PRO-32932
(08/12/2004), sec. 8
This section defines in detail the client-agreed procedure and
requirements for conducting the rigid spoolpiece metrology from start to
end. The dissertation will investigate the adequacy and relevance of this
procedure.
Elementary Linear Algebra (2000)
The textbook serves as an introduction to linear algebra and focuses
mainly on matrix techniques. Linear transformations are a major part of
metrology calculations, and as such, matrices represent the most
constructive means of addressing this problem. However, the text does
not offer in-depth and adequate information on linear transformations
relative to metrology. The text does offer good introduction to matrices
and will be used as referral for general matrix techniques.
DCS Production Manifold Dimensional Control Results ET0141E-I005/GO
(15/10/2004)
This report provided the specifics of the offset measurements for the
subsea structure for the DCS manifold. The document is an accurate
report of actual procedures and results used and obtained for dimensional

_____________________________________________________________________________________ Page 24 of 62
control surveys. As such, it provided a solid basis for the analysis of the
techniques and expected outcomes.
2.2.3 Environmental and instrument sources of error
Flexible and Rigid Spoolpiece Metrology Procedure BAO-TEC-PP-PRO-32932
(08/12/2004), sec. 7
The section handles the error budget for the operation and outlines
expected sources of error for each critical measurement. The text will be
viewed in conjunction with manufacturer’s specification for the
instruments to be used.
Acoustic Positioning Training Course Lecture Notes (24/04/1997)
The lecture notes provide an extremely detailed, in-depth analysis of
sources of acoustic noise, interference and error of particular significance
to Sonardyne LBL positioning using Compatts. As this is the primary
means of metrology measurement offshore, the notes are adequately
suited and will provide an important information source for the
dissertation. Due to the length and depth of the document, the source will
be reviewed and analysed further throughout the length of the
dissertation preparation.
Octans User Guide MU/3453/EGF/003/D (08/2005)
This guide is a detailed presentation of the specifications for the iXSEA
Octans fibre-optic gyrocompass. It is also a very comprehensive
technical manual on fibre-optic gyroscope systems. It proved very useful
in detailing options for heading determination by gyrocompass
instruments.
Compatt Mk4 Product Brief (28/10/2003)
As the primary subsea measurement instrument, this brochure provided
the core specifications for the Mk4 Compatt.
Maintenance Manual EHF Compatt Mk4 (20/06/2001)
As a maintenance manual, this document provided in-depth information
on the workings and options available for EHF Mk4 Compatts. This

_____________________________________________________________________________________ Page 25 of 62
document was used extensively in the research for information pertaining
to these sensors.
User’s Manual for Digiquartz Broadband Intelligent Instruments (10/2004)
The manual was used to investigate the requirements, accuracy
expectations and specification for digiquartz depth sensors. The text was
sufficient to provide a background into this type of sensor.
The Character of the Tide (06/11/2003)
The whole text provides an insight into the science of tides and was used
extensively in the dissertation. In particular, the book provided detail for
tidal prediction and the effect of tide on depth determination to the
accuracy required for rigid spoolpiece metrology.
2.2.4 Typical tolerance requirements
Flexible and Rigid Spoolpiece Metrology Procedure BAO-TEC-PP-PRO-32932
(08/12/2004), sec. 5, sec. 6
The Survey Tolerances and Dimensional Control requirements as set out
in the procedure are brief and will need further investigation. Questions
of attainability and suitability of suggested requirements and techniques
will be analysed.
2.3 Conclusions: chapter 2 It was found that relevant literature is scarce, due to the specialist and abstract nature of
the subject. However, information drawn and interpolated from the available literature
and the authors own experience is deemed sufficient to adequately address the questions
posed by the topic. This is expressed in subsequent chapters.

_____________________________________________________________________________________ Page 26 of 62
CHAPTER 3
3 RESEARCHED INFORMATION REVIEW
3.1 Introduction Having been introduced to the subject matter, objectives and methodology of the
dissertation in chapter 1, chapter 2 then provided the backbone of the research via an
intensive literature review.
This chapter summarises the bulk of information exposed by the literature review in
chapter 2, collated for the first primary objective of the dissertation. Following is thus a
breakdown of the minimum requirements and outcomes for a typical metrology
undertaking. The information addresses all requirements of the case-study.
3.2 Resource analysis As a largely analytical research paper, resources are restricted to only 3 major variables.
1 Case-study data.
2 Literature.
3 Hardware and software requirements.
The case-study as described in the introduction has been completed and implemented in
the field. All data has been collated and made available for this dissertation and is
presented in this chapter.
3.3 Consequential effects Due to the analytical nature of the project, consequential effects are limited.
Consequences of safety, sustainability and ethics pertaining to this dissertation have
been considered and found to be largely insignificant.
However, it is worth noting that the possible effects of the result indicating a
significantly different procedure can highlight issues of previously inappropriate
technique or raise questions of time management of a metrology task.

_____________________________________________________________________________________ Page 27 of 62
It is the intention of the dissertation to investigate and bring any such discrepancy to the
fore. The consequence is understood and the dissertation is justified by its perceived
contribution to the measurement sciences. These effects, if any, are discussed and
analysed in chapters 4 and 5.
3.4 Minimum dataset As was identified in chapter 1, there is a need to measure the dimensions required to
bridge the 2 hubs by fabricating a spoolpiece. Metrology is used to determine these
dimensions within the specified tolerances. A minimum dataset thus exists to provide
the basis of the 3 dimensional relationships required for the manufacture of a
spoolpiece. This chapter covers these minimum measurement requirements.
3.4.1 Horizontal angle between hub and spool
With respect to dual-bore hubs, this is critical as it accounts for the angular
alignment of the end-cap relative to the spool. In figure 5, this is accounted for by
angles α and β. This measurement is derived from the difference between 2
azimuths.
3.4.1.1 Structure heading
Azimuth is only required in a relative frame, but True North is used as
datum, due to the use of north-seeking gyrocompass instruments. The
structure heading is used along with measured dimensional offsets for the
structure, to determine the Hub heading. The Hub heading is indicated in
figure 5 as axis Y1 and Y2.
3.4.1.2 Spool heading
This is the bearing between the two Hubs and is determined by
mathematical polar after deriving coordinates for each Hub within an
acceptable north-oriented projection. Subsea, this is accomplished by a
least squares adjustment of range measurements between Compatts
installed at each Hub and a calibrated Compatt array pre-installed on the
seabed. Compatt transducer positions are translated to Hub centre
positions by a 7-parameter shift using measured shift parameters to be
fully described in a subsequent chapter.

Figure 5: Top view of structures showing hub to spool alignment
_____________________________________________________________________________________ Page 28 of 62

3.4.2 Hub-hub vertical difference
_____________________________________________________________________________________ Page 29 of 62
measurements. Lowest Astronomical Tide is used as the datum for the case study.
3.4.3 Hub inclination
itch and roll, relative to the vertical plane or Z-axis. As
cal gravitational direction at either end of
This value accounts for the Z-axis in the 3 dimensional relationships between the 2
hubs. As each structure is installed on differing seabed topography, it is expected
that this value is an unknown that needs to be accounted for within the required
tolerances. A tidal datum is essential, due to the possibility of tidal drift between
Figure 6: Longitudinal profile between hubs
Inclination refers to the p
each structure is not installed perfectly level, due to topography or subsidence, and
each Hub is not evenly aligned to the structure, it is evident that the inclination
must be known to allow for flush fitting of the spool end-cap to the Hub.
Inclinations are derived relative to the lo
the spool. The inclination is determined aligned to the structure heading for ease of
measurement, but is required in relation to the spool heading. It is translated from
inclination in plane of structure heading to plane of spool heading using the
previously determined horizontal angle between hub and spool.

Figure 7: Hub inclinations in the vertical plane: pitch and roll
_____________________________________________________________________________________ Page 30 of 62

3.4.4 Hub-hub baseline
This is the primary horizontal-plane measurement. Using Compatts installed in
each Hub, ranging between the transducers produces the primary range
measurement. It is needed to translate the slant distance between transducers to a
horizontal distance between the two Hub centres using the acquired Hub headings,
spool heading and Hub inclinations in the plane of the spool. Figure 6 indicates the
horizontal and required slope distance between Hub centres.
3.4.5 Offsets
3.4.5.1 ROV sensor offsets
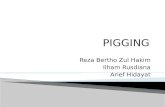
Figure 8: Typical ROV sensor offsets
The primary ROV sensors are a ROVNav Transducer, a Fibre-Optic
Gyrocompass, a Motion Reference Unit, a Paroscientific Digiquartz
Depth Sensor, a Direct Reading Sound Velocity Probe and a structure
docking-bar. The ROVNav is the primary source of ROV position, while
the MRU provides pitch, roll and heave values. The gyrocompass
provides rotation and the Digiquartz provides depth readings. By using
_____________________________________________________________________________________ Page 31 of 62

all these sensors along with measured x, y and z offsets for each from a
reference point of the ROV, a 3d position can be generated for any other
point measured point of the ROV. The docking-bar is used to dock into
the manifold or x-tree structure, so as to transfer heading and position to
the structure. Position and heading can thus be calculated for the
docking-bar. The docking-bar is assumed flush to the structure docking-
receptacle.
3.4.5.2 Compatt sensor and base-plate offsets
The EHF Compatt comprises 3 sensors namely, the transducer head, the
inclinometer sensor and the digiquartz sensor. These are aligned
vertically with each other in the Compatt tube. The inclinometer sensor
readings do not require translation by offsets as they are angular
measurements of pitch and roll, however the transducer and digiquartz
sensors measure distances and depths respectively and thus require
offsets measured in the vertical plane of the Compatt to reduce them to
the Compatt base-plate plane. The Compatt base-plate is of a measured
thickness and thus the digiquartz depth can be translated to a top of Hub
depth by using these measured offsets. The Hub centre to top of Hub
offset is supplied from dimensional control surveys of the structure, so
that these depths and distances can be translated to the Hub centre.
Figure 9 below depicts the Compatt and Hub cross-section.
_____________________________________________________________________________________ Page 32 of 62
0.905m
0.441m Ref
0.020m
Transducer C O M P A 1.366m T T Digiquartz
Base-plate H U B
Figure 9: Compatt, base-plate and hub vertical offsets

_____________________________________________________________________________________ Page 33 of 62
3.4.5.3 Structure dimensional control
During the manufacture of the x-tree and manifold, alignment errors are
introduced in the hub and docking receptacle positions. In order to
translate bearings and positions from the docking receptacle to each hub,
the x, y and z offsets have to be known to within an acceptable accuracy.
These are determined in the fabrication yard using conventional land
survey techniques by Total Station. Figure 10 below shows the DCS
Manifold with all relevant targets such as the hubs and docking
receptacle used during the dimensional control survey.

Figure 10: Booking sheet for DCS manifold
_____________________________________________________________________________________ Page 34 of 62

_____________________________________________________________________________________ Page 35 of 62
3.5 Further mathematical considerations The Compatt transducer positions (E, N, and Z) for each hub, derived from the least
squares adjustment for spool heading calculation, is reduced to hub centre positions (E,
N, and Z) by the addition of DE, DN and DZ. These changes in positions are computed
using the inclination in the plane of the hub heading, the hub heading and the horizontal
and vertical offsets (Compatt transducer to Hub centre). These are used in a 7-parameter
translation matrix which is reduced to 4-parameters by the absence of scale, x and y
offsets (transducer and hub centre are coincident in vertical plane).
Inclinations are translated from the plane of the hub heading to the plane of the spool
heading using the horizontal angle between the hub and the spool headings. This is a
simple rate of change calculation through 360°.
The direct range between transducers is used as the final range and so, the hub positions
need to reflect this. The manifold transducer position, direct range, bearing between
hubs and difference in height is used to determine a new x-tree transducer position. This
is easily accomplished using linear geometry. The DE, DN and DZ determined earlier
are then added to the x-tree transducer positions to determine a new x-tree hub position.
These calculations then leave us with the following:
1. Inclinations in the plane of spool heading
2. Hub centre positions (Easting, Northing and Depth) based on the direct range
between Compatts
From these it is then possible to easily derive all the required measurements.
3.6 Instrumentation: requirements, accuracies and precisions The typical sensors used for metrology will now be introduced. Due to the accuracy and
precision required, the measuring instruments used are high-end subsea units capable of
providing the necessary tolerances and surviving the adverse environmental conditions.
Each measurement requirement as highlighted in the previous chapter will be addressed
in terms of the requirement and adequacy of these sensors.

3.6.1 Horizontal angle between hub and spool
3.6.1.1 Structure heading
The structure (manifold or x-tree) heading is determined by using a ROV
mounted survey-grade subsea gyro for determining the structure
headings relative to true north. Gyros are prone to drift errors and
changes in speed and latitude. Fibre-optic gyros provide a significant
advantage in repeatability over a standard mechanical gyrocompass. For
the case-study, an Octans fibre-optic subsea gyrocompass by iXSEA was
used to provide manifold and x-tree headings relative to True North.
Listed below is the performance specification as supplied by the
manufacturer.
Dynamic Accuracy (whatever sea-state) ± 0.2° Secant Latitude (*)
or 0.1° Rms
Settle point error ± 0.1° Secant Latitude
or 0.05° Rms
Settling time (static conditions) 1 Minute
Settling time at sea 3 Minutes
Repeatability ± 0.025° Secant Latitude
Resolution 0.01°
No Latitude limitation
No speed limitation
Table 1: Octans fibre-optic gyrocompass technical performances
The structure heading is attained by physically docking the ROV onto
the structure and logging data for the FOG on the ROV. This is
accomplished by docking receptacles on the relevant structure and a
docking bar attached to the ROV bow. The ROV docking bar can be seen
in figure 8. Below is an illustration of a dummy docking bar slotted into
a docking receptacle of the DCN manifold.
_____________________________________________________________________________________ Page 36 of 62

Figure 11: Trial fit of ROV dummy docking bar in DCN manifold
3.6.1.2 Spool heading
As stated previously, the bearing between the two hubs is determined by
mathematical polar after deriving coordinates for each hub within an
acceptable north-oriented projection. To arrive at the coordinates,
Compatts are installed in each hub, as well as in an array around the area.
The figure 12 below illustrates the array Compatts as installed around
DCN and DCS drilling clusters. With Compatts able to acoustically
range between each other, it is possible to solve for the absolute positions
of each hub Compatt transducer in a least squares adjustment, if the array
Compatt transducer positions are known within a suitable projection.
_____________________________________________________________________________________ Page 37 of 62

Figure 12: DCN and DCS array Compatts and baselines
_____________________________________________________________________________________ Page 38 of 62

Table 2: Compatt specifications
To ensure minimum transmission loss of the acoustic signal and highest
accuracy of range measurement, the highest available frequency is used.
Despite their limited range, EHF Compatts are deemed most suitable to
the task. The Sonardyne (manufacturer) supplied data for the available
Compatt frequencies are supplied in table 2 above.
It can be seen from this table, that the EHF frequency band offers the
best range accuracy, but has a disadvantage in the maximum effective
range of the acoustic signal. This will limit the placement of the array
Compatts to within 1km of each other. Some ranges may not be
attainable, thus possibly negatively influencing the balance of the least
squares adjustment.
Assuming that all inter-Compatt ranges can be adequately measured, the
array Compatts will also need to be coordinated within the reference
framework of the chosen projection. This is accomplished by
coordinating at least 2 Compatts into the projection, and solving the
remainder in a least squares adjustment. The technique used for this is to
coordinate the chosen Compatts by a suitably accurate GPS system
combined with an acoustic positioning system termed USBL (Ultra Short
Baseline).
_____________________________________________________________________________________ Page 39 of 62

_____________________________________________________________________________________ Page 40 of 62
he Sonardyne Lecture Notes describe USBL positioning as follows:
‘In the … Ultra Short or USBL … technique, … a single, more
In effect, simul nt are taken to
or the case study, a Starfix HP high-accuracy DGPS system by Fugro
T
complex hydrophone which can measure the angle of arrival of
an acoustic signal in both horizontal and vertical planes, ... This
is achieved by phase comparison techniques. Thus a single
beacon may be "fixed" by measuring its range and bearing.’
Figure 13: Super (Ultra) Short Baseline method (SSBL)
taneous USBL and DGPS measureme
produce a position for the Compatt. A series of these measurements,
termed a box-in, is gathered and meaned to produce a most likely
position for the Compatt within the chosen projection (translated within
the software from GPS WGS84). The term box-in refers to the pattern of
data gathering to reduce errors in the acoustic segment, introduced by
transducer and ship alignment errors.
F
was used as well as a modern HiPAP 500 USBL system by Simrad. The
manufacturer supplied system accuracies are supplied below.

_____________________________________________________________________________________ Page 41 of 62
3.6.2 Hub-hub vertical diff
rmining relative depths at each Hub, is the
hermal sensitivity: 0.0008% Full scale = 16mm
erence
The primary instrument used in dete
Digiquartz end-cap attached to the Compatt. It is a Compatt add-on module which
allows depth and temperature values to be measured and telemetered via the
acoustic signal through the water column to a ship or ROV mounted transceiver. A
set of readings for a 2000m rated sensor, will typically yield an error of 16mm in
the relative depths between the two hubs.
T
Resolution: 0.000001% Full scale = 0.02mm
3.6.3 Hub inclinat
rmined by using a Compatt with an inclinometer end-cap
Surface Positioning System Expected Accuracy
Primary DGPS: Starfix HP +/- 0.5m
Secondary DGPS: Starfix HP +/- 0.5m
Sub-surface Positioning System Expected Accuracy
HiPAP 500 USBL
<0.5% of slant range, with angular
resolution of 0.3° (slant range is
limited to twice water depth)
Table 3: Surface positioning accuracy
Table 4: Sub-surface positioning accuracy
Table 5: Specifications for a 2000m rated digiquartz depth sensor
ion
Hub inclinations are dete
installed instead of a digiquartz end-cap. The sensor, measures the pitch and roll
relative to an alignment mark on the Compatt body and the local gravitational
vertical. The Compatt is aligned in the hub with the structure heading as reference.
The Compatt acoustically telemeters the pitch and roll values expressed as a
voltage, to a surface transducer. A formula is provided by the manufacturer to
convert voltages into angles. The inclinometers are available in 3 different
resolutions characterised by the trade off between accuracy and effective range.

_____________________________________________________________________________________ Page 42 of 62
The 14,5° maximum range inclinometer, is the most accurate available and as such
is the choice inclinometer for metrology operations.
Accuracy: ±0.1°
Resolution: ±0.01°
3.6.4 Hub-hub baseline
Compatts are capable of ranging between each other and telemetring the total turn-
around time back to the surface transceiver. If the speed of sound is then known,
this time can be converted to a slant distance between the 2 Compatt transducers.
The EHF bandwidth provides an achievable range accuracy of less than 0.025m as
already discussed under Spool Heading determination above.
To arrive at a hub-hub baseline from a transducer-transducer baseline, we have to
consider the inclination and horizontal angle between the hub and the spool as
illustrated in figure 14 below.
3.6.5 Offsets
The offset consideration is straight-forward, and has been adequately underlined in
section 3.2.5. The required offsets are either supplied by the manufacturer,
measured by tape or total station.
Figure 14: Effects of Compatt transducer position on required baseline
Table 6: Specifications for a 14,5° Schaevitz LSOP inclinometer

_____________________________________________________________________________________ Page 43 of 62
3.7 Sources of error: effects and solutions
3.7.1 Inclinometer to base-plate error
A base-plate is required to slot and align the Compatt into the hub. However, an
error is introduced as the Compatt cannot be mounted perfectly perpendicular to the
base-plate. The inclinations as measured by the Compatt are thus not a true
reflection of the hub inclination due to this error. The solution employed is to rotate
the Compatt through 90° and acquire readings in all 4 quadrants. The mean of these
readings effectively nullifies the effects of this error. The base-plate has 4
alignment markings suitably named north, south, east and west. The Compatt is
attached, aligned to the north marking and the base-plate (and Compatt) can now be
rotated while slotted into the hub. The base-plate markings are now easily aligned
to the hub heading mark. Figure 3 illustrates a Compatt mounted on a base-plate,
with base-plate alignment marks shown.
3.7.2 Acoustic errors
Factors affecting the signal strength performance of an acoustic system will not be
considered, as these do not affect the accuracy of the LBL system. As such, only
the factors affecting the accuracy will be reviewed. The Sonardyne Acoustic
Positioning Training Course Lecture Notes (24/04/1997) define 4 major influencing
factors:
3.7.2.1 Acoustic range resolution
The resolution of the acoustic pulse detection system is the primary
limitation on short-range LBL accuracy. This is largely dependent on the
frequency and signal processing techniques.
EHF has a bandwidth of ±800Hz incorporating 12 separate channels and
represents the highest acoustic frequency available and thus also the
highest bandwidth due to direct proportionality. Ranging precision is
also proportional to bandwidth and the more channels in the band, the
lower the precision. With a wider bandwidth, pulse length can be
reduced, allowing for extended battery life and less pulse overlap

_____________________________________________________________________________________ Page 44 of 62
between different channel replies. The Sonardyne Acoustic Positioning
Training Course Lecture Notes (24/04/1997) aptly states:
“The total number of channels determines the frequency
separation, which in turn determines the electrical bandwidth in
the receivers and thus the ranging precision. A larger number of
channels reduce the bandwidth, thus decreasing precision and
requiring longer pulses.”
Signal detection and validation are techniques used by the LBL system
for signal assurance. Detection and validation times increase as the
frequency decreases due to the lower bandwidth at low frequency, thus
requiring longer pulse lengths. The consequence of this is lowered
precision. With EHF this effect is largely reduced due to the high
frequency. Full wave processing allows the timing variation to be
effectively halved under low noise conditions (such as deep water
operations). This feature is incorporated as standard in EHF equipment
allowing for specialised uses such as in spool piece metrology surveys.
Multi-Path interference is defined as follows:
“Multi-Path interference occurs when multiple signals due to
refraction or reflection arrive at a receiver coincident with the
direct signal, causing pulse overlap.”
If the ghost signal arrives before the detection time, the direct signal may
not be detected as result of destructive interference. If the ghost signal
arrives during the validation process, the direct signal will most likely
not be validated. The effect of these signals will result in either no signal
being validated, or a later return (corresponding to reverberation) being
detected and validated giving a range delay. This can occur when either
the sea surface or subsea structures reverberate on similar amplitudes to
the direct signal. Lower frequency bandwidths are greater affected due
to the longer pulse lengths and as such, EHF is least affected. Multi-path

_____________________________________________________________________________________ Page 45 of 62
is managed by data-redundancy techniques and the comparison against
expected outcomes.
3.7.2.2 Timing accuracy
The range between two Compatts is achieved by measuring the two-way
travel times between the interrogator and the other Compatt and then
multiplying the travel time by the speed of sound to obtain distance.
We have to consider the turn-around delay (the time between the
detection of the interrogation signal and the reply transmission) and the
transponder detection delay. The turn-around time can be user-set to
manage pulse-overlap problems and is controlled by a crystal timer
accurate to 2.5mm. Detection delay is compensated for in the firmware.
Both timing issues can thus be ignored as a source of influential error.
3.7.2.3 Speed of sound uncertainty
The speed of sound at the measurement depth acts as a scaling factor for
acoustic range measurement. The range accuracy depends on the
accuracy to which the speed of sound has been measured. The speed of
sound can be measured in 3 ways:
1 Using a velocimeter
2 Using known targets on the seabed
3 Computed
A velocimeter operates on the sing-around principle where a high
frequency pulse is timed over a fixed distance. These instruments are
calibrated under known propagation conditions in a laboratory and must
be supplied with current calibration certification. Accuracy expectations
are within ± 0.03 m/second (0.2 percent). These are the most accurate
means of determining the speed of sound and are thus the instrument of
choice for metrology.

_____________________________________________________________________________________ Page 46 of 62
The second option is based on the same principle, but on a larger scale.
The difficulty in determining the distance between transducers limits the
accuracy to which the principle can be applied.
It is also possible to determine the speed of sound by formulae
requirement measurements of depth, salinity and temperature. As this
technique is easy to incorporate into a single sensor and provides
consistent results without frequent recalibration, it is not as accurate as a
velocimeter due to the propagation of errors through the individual
sensors. A temperature change of 0.2°C gives a speed error of 0.8m/s or
0.05%, assuming a speed of 1488.0m/s. This is equivalent to a range
error of 0.05m over a 100m baseline and is inadequate for metrology.
Due to changing conditions, continuous monitoring and update of the
speed of sound is essential to maintain quality assurance during the
duration of the range measurement.

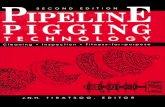
VESSEL Maersk WinnerDATE 24-April-05 11:30
DIVE NO.LOCATION
INSTRUMENT Winson Tritech
MEAN VELOCITY 1493.09 m/sBOTTOM VELOCITY 1488.10 m/sT'DUCER VELOCITY 1535.70 m/s
AVERAGE DENSITY 1.0266OBSERVED JF/JCCHECKED MM/SB
DCS MetrologyROV 89 Dive 136
T/S DIP @ DCS MetrologyWCH 26-P6 Xtree & WCH 22-P8 Xtree
24-APR-05 11:30
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1480.00 1490.00 1500.00 1510.00 1520.00 1530.00 1540.00
Sound Velocity (m/s)
Dep
th (m
etre
s)
Figure 15: Sound velocity profile
_____________________________________________________________________________________ Page 47 of 62

_____________________________________________________________________________________ Page 48 of 62
3.7.2.4 Ray refraction effects
The speed of sound varies with depth due to the changing temperature,
depth and possibly salinity (due to layers of fresh water mixing). Ray
bending is the phenomenon where these layers result in refraction of the
acoustic wave front as it passes through the water. These conditions
introduce an error into the measured range due to changing speed of
sound. A slant-range correction matrix will need to be applied using the
sound velocity profile. Due to the short range and minimal depth
difference for a typical deepwater metrology project, the ray bending
effect is minimal and a constant speed scaling factor is assumed. The
profile in figure 15 illustrates the effect of dropping temperature on
speed of sound between the surface and 800m where after, the effect of
increasing pressure takes over and increases the speed of sound.
3.7.3 Heading errors
The fibre optic gyrocompass is the primary heading measurement sensor and has a
few errors associated with it. All gyrocompasses are sensitive to the speed of travel
of the vessel and current latitude. The x, y, z offsets relative to the docking bar for
the gyro mounted on the ROV also needs to be considered.
The international standard (ISO 8728) defines that:
“Course error in degrees for a gyrocompass aligned north-south is
determined by the formula V/5π x the secant of the latitude, where V is the
North component of the speed in knots”
With a dynamic accuracy of 0.2 degree x secant of latitude for a Octans fiber-optic
gyroscope, the speed in knots at which an error greater than this appears is:
“V_MAX = 0.2 x 5π = 3,2knots”
It can be seen that since the heading readings are logged while the ROV is
stationary (while docked onto the structure), this error can be largely ignored as its
effect will be within the system accuracy. It is still necessary to ensure the speed
setting for the gyro is set to zero.

As the gyrocompass approaches the poles, the heading error due to the secant of the
latitude tends towards infinity. An inaccuracy in the known latitude introduces a
system inaccuracy which becomes more relevant as the gyro approaches the poles.
This error is however very small and is made further insignificant by the localized
nature of a metrology project and the availability of accurate latitude from GPS
units. The curve in the figure 16 shows the heading error in degrees multiplied by
the secant of the latitude versus the latitude of the current location, assuming that
the latitude entered in the Octans unit is incorrect by one degree.
Figure 16: Error in heading due to latitude inaccuracy
3.7.4 Tidal variation
The acquisition of the relative depth difference between hubs requires that the same
instrument is used to measure depths at each hub due to reasons discussed in
previous chapters. The time between readings allows for a tidal variation to occur,
thus introducing an error into the relative depth between the 2 hubs. Tidal
prediction software is used to determine tidal effect at each reading and this is used
to align each reading to a height datum such as Lowest Astronomic Tide. GPS time
is logged at each reading to accurately manage the timing of each measurement.
Tidal prediction is not an exact science and its accuracy is relative to the adequacy
of the tidal model for the area. As such, time between measurements at each hub is
kept within 30 minutes to reduce the total effect of tidal variation.
_____________________________________________________________________________________ Page 49 of 62

3.7.5 Instrument drift, alignment errors, rounding errors, etc
The remaining errors are not specific to metrology and are managed by adopting
good survey practice. Data redundancy techniques, covered in a subsequent
chapter, also minimises some of these errors and provides quality assurance of the
integrity of the acquired measurements.
3.8 Metrology tolerances The tolerance defined in the table below accounts for the tolerance allowed between the
spoolpiece end-cap face and the hub face, where L, T, V accounts for X, Y, Z
respectively. The Z (or V) tolerance has subsequently been deemed unachievable and
increased to ±50mm.
Table 7: Metrology tolerances
It can be seen from the above requirements and the instrument accuracies discussed in
previous sections, that the ultimate tolerance is achievable using existing
instrumentation.
3.9 Data redundancy and error reduction techniques
3.9.1 Horizontal angle between hub and spool
3.9.1.1 Structure heading
The ROV will dock onto each structure docking receptacle a minimum
of 3 individual times during which a set of 10 heading readings is
logged. A closed loop circuit will be adopted with the ROV docking onto
the manifold, then x-tree and ending back at the manifold. Any
difference due to instrument drift will be apportioned throughout the
circuit by time. As a quality assurance check, the ROV position will also
be logged using the EHF LBL array whilst docked in and used in
_____________________________________________________________________________________ Page 50 of 62

_____________________________________________________________________________________ Page 51 of 62
conjunction with the hub position (derived during calculation of the
spool heading) to calculate a structure heading. This value will be used
as a gross error check on the gyro heading only, due to its poorer
accuracy.
3.9.1.2 Spool heading
Positions for each hub are calculated using the ROV position whilst
docked into the structure and the x, y, z dimensional control values for
each structure. These alternate hub positions are then used to compute a
true bearing between hubs and compared against the previously derived
spool heading.
3.9.2 Hub-hub vertical difference
A closed loop level circuit is adopted, with the same Compatt starting and ending in
the same hub. A series of 10 depths and time are logged at each occupation of the
hub. Any difference due to instrument drift will be apportioned throughout the
circuit by time. Two separate complete circuits will be completed to determine a
mean depth at each hub location. Each circuit will be completed within 30 minutes
to minimise tidal variation. An ROV manipulator-held digiquartz depth sensor will
be employed using the same technique above for quality assurance of the relative
depth readings.
3.9.3 Hub inclination
The Compatt will be installed in the first hub with the base-plate aligned to
structure north and a set of 5 readings taken. The Compatt will be rotated clockwise
through 90° and 5 readings logged at each quadrant, ending with return
observations at structure north. The return observation is used as quality control on
the 4 quadrant readings. All the readings will be meaned to derive a single
inclination in the plane of structure north.

3.9.4 Hub-hub baseline
The direct range measurement between the two hub Compatts is the primary range
measurement. However, 2 extra Compatts are also installed in frames on the seabed
to form a braced quadrilateral array. 10 baselines are measured each way between
all Compatts and used in a least squares adjustment by holding the hub-hub bearing
and 1 hub position fixed. The solved distance between the 2 hubs is used as a
quality control check against the direct measured range. All outliers greater than
0.05m from the mean range is discarded from any solution.
Figure 17: Braced quadrilateral between manifold and x-tree
3.10 Conclusion: chapter 3 This chapter represents the requirements and methods used for the case-study and for
deep water rigid spoolpiece metrology in general. An in-depth description of these
techniques has been given in this chapter, and the following chapters will analyse these
methods and provide discussion on the adequacy of these current techniques and
provide justification for any improvements found.
_____________________________________________________________________________________ Page 52 of 62

_____________________________________________________________________________________ Page 53 of 62
CHAPTER 4
4 ANALYSIS
4.1 Introduction Until now, this paper has provided an in-depth breakdown of metrology techniques
employed during the case-study metrology project. All relevant information has been
reviewed and presented through detailing the nature, requirements and expectations of a
metrology project.
This chapter presents the analysis of these techniques and the examination of there
appropriateness to rigid spoolpiece metrology. It will also detail the improvements on
techniques and equipment found and highlights the need for further development.
4.2 Critical analysis of metrology techniques
4.2.1 Horizontal angle between hub and spool
4.2.1.1 Structure heading
The use of an ROV for docking onto each structure to attain its heading
is both cumbersome and time consuming, as is the nature of ROV work.
This ultimately translates into a cost increase as well as the introduction
of errors through instrument drift over time. Alternative options are
limited, but the problems associated with the current technique will be
overcome with the use of a standalone FOG or inertial gyrocompass that
can be inserted and aligned directly into the hub. This will also negate
the error introduced by the application of offsets to transfer the heading
from the docking receptacle to the hub centre. It is unlikely that a
manipulator-held gyrocompass will improve timing, as it will still
require ROV intervention. Acoustic telemetry of a gyrocompass reading
is a viable option, but there is currently no such Compatt end-cap or
other option commercially available.

_____________________________________________________________________________________ Page 54 of 62
4.2.1.2 Spool heading
LBL positioning is the only available high accuracy option for subsea
positioning of the hubs. There are, however, considerations for
improving the technique. Firstly, the ultimate quality is dependent on the
accuracy of the ship-borne GPS used. GPS quality control and assurance
is the basis of separate studies and is beyond the scope of this
dissertation. For the purposes of this dissertation this is accepted as a
limitation of the product and is accounted for in procedure design.
Acoustic positioning can be improved by adopting an alternative to the
box-in procedure described in chapter 3.4.1.2. A more suitable LBL
global calibration technique exists in the clover-leaf method. This is an
iterative approach where simultaneous surface positions and ranges
(surface transducer to each Compatt) is gathered while the vessel sails
around the array in a clover leaf pattern. The dataset gathered is used in a
best fit criteria model to derive global positions for each seabed
transponder. If used in conjunction with direct ranging between
Compatts, the method represents a much tighter fit of global positions for
each transponder. This equates to a more accurate spool heading
computation.
4.2.2 Hub-hub vertical difference
The only option available for determining depth is by using pressure sensitive depth
sensors. The Digiquartz depth sensor is currently the pinnacle of commercially
available depth sensor accuracy and these have been employed in the case-study for
rigid spoolpiece metrology (refer to chapter 3.4.3 and 3.6.2 for further description).
Technique improvements thus exist only in the reduction of time between
successive measurements and the accuracy to which tide can be predicted. Due to
the remote location of places like the Ivory Coast, more accurate tidal data is not
available and is unlikely to be so in the near future. In the case-study, the time
between successive hub measurements is below 30 minutes and the tidal variation
over this period is generally within 10mm. There are few options available to
decrease this time, as it is ROV dependent. It is worth noting at this stage that the

_____________________________________________________________________________________ Page 55 of 62
overall effect of tide is manageable within a 30 minute period in areas of low tidal
variation, even without accurate tidal data.
4.2.3 Hub inclination
The 14,5° inclinometer Compatt end-cap is the prime choice for inclination
measurement due to it’s acceptable accuracy and it’s ease of use (refer to chapter
3.4.3 and 3.6.3 for further description). The main area of improvement thus lies in
improving the rotational alignment of the Compatt in the hub. The current
technique of meaning measurements attained from each of the 4 quadrants largely
reduces this error. A further improvement would require a redesign of the hub and
mounting base-plate such that the base-plate slots perfectly into the hub at each
quadrant. This requires engineering considerations for the structure fabrication and
is thus outside the intention and scope of this dissertation.
4.2.4 Hub-hub baseline
For deep water applications, Compatt ranging represents the only available option
for distance measurement. In shallower water, where divers are able to operate, it is
possible to employ a technique termed taut-wire metrology, which uses the
installation and tensioning of a wire cable between the 2 hubs to determine the
distance between hubs. This technique however, is not currently applicable to
deepwater metrology projects.
The direct range is favoured over the least squares adjustment of the braced
quadrilateral (see chapter 3.7.4) due to its simplicity and the absence of
compounded errors. It is however most vulnerable to scaling and large errors due to
these being spread out in the least squares adjustment. It is therefore imperative to
use the least squares adjustment as a check as well as having adequate quality
assurance of the speed of sound at the transducer level. These have been covered in
previous chapters and no improvements for the technique have been found.

_____________________________________________________________________________________ Page 56 of 62
4.2.5 Offsets
Offset measurements of the manifold and x-tree structures (refer to chapter 3.4.5
for further description) are conducted in the fabrication yard using single second
total stations and conventional land surveying techniques. This method is thus by
far sufficient for metrology purposes, as the errors and inaccuracies introduced in
the subsea sector far outweigh the errors introduced by offset measurement. The
current techniques employed for offset measurement is sufficient and any further
analysis thereof is the scope of a separate study and outside the aims of this
dissertation.
4.3 Conclusion: chapter 4 It is of note that no major improvements for the techniques or equipment used have
been found. It was however found that spool heading accuracy can be improved by an
alternate LBL box-in technique termed the Clover Leaf Method. In addition, in order to
improve all the measurements beyond their current level of accuracy, new technology or
engineering considerations have to be taken into account. These considerations are
beyond the scope of this dissertation, but the need for further study has successfully
been accentuated. The following chapter will discuss consequences of these findings
and conclude the dissertation.

_____________________________________________________________________________________ Page 57 of 62
CHAPTER 5
5 CONCLUSIONS, DISCUSSION AND IMPLICATIONS
5.1 Introduction The aims and objectives identified in chapter 1 have been addressed by the reviews and
analyses presented in the chapters 2 to 4. Specifically, the analysis quantified sources of
error and the accuracy, precision and relevance of the existing techniques for rigid
spoolpiece metrology.
This chapter will summarise the outcomes and implications emphasised by the research.
5.2 Discussion The findings of the analysis presented in chapter 4 allude to two important
considerations. Firstly, despite the preference of the clover leaf method over the box-in
method for LBL calibration, there are no major findings of technique improvement.
Secondly, there are limited alternatives for instruments and sensors. The primary
reasons for these are as follows.
5.2.1 Limited technology options
The adverse environmental conditions do not allow for a wide range of
technologies to be applicable thus sound remains the sole waveform for subsea
positioning. The depth of water specific to this type of metrology and the
case-study is also a limiting factor and the acoustic sensors used in the case-study
are already at the pinnacle of instruments used for deep water metrology. The depth
also restricts the subsea manipulation to ROV operations which is slow and
cumbersome in comparison to diver-intensive operations.
5.2.2 Adequacy of current techniques
The current metrology techniques employed are sufficient to meet the tolerance
requirements to ensure a ‘fit’ of the spoolpiece. The spoolpiece design is such as to
take into account the errors associated with metrology and allows for the tolerances
to be met by the metrology operations. This results in a lack of demand for more

_____________________________________________________________________________________ Page 58 of 62
accurate metrology techniques and sensors. Industry responds in suit with a
decrease in rate of technological advancements.
5.2.3 High level of skills offshore
The intensive work environment offshore, driven by the high cost of operation,
ensures a high level of skills among personnel. This results in metrology operations
being managed by competent professionals. This is evident in the high levels of
data redundancy and error reduction techniques that have been devised specifically
for deep water rigid spoolpiece metrology.
Even though the existing techniques and instrumentation are adequate to fulfil the needs
of a metrology project, the dissertation has exposed numerous areas where further
investigation is needed. These areas are the topics of separate studies and thus beyond
the scope of this paper. These further studies are however listed below as outcomes of
this dissertation and are as follows.
5.3 Further research and recommendations The breadth of the topic is substantial and is supported by very little academic study of
the subject. As such, this paper opens the door to further research and development. The
following topics are examples of these needs as explained in chapter 4.
5.3.1 Dynamic GPS positioning of vessels at sea
GPS is the primary surface positioning system available on vessels today. Their use
in metrology is described in chapter 3.4.1.2. The accuracy required by metrology,
the adverse environmental conditions at sea and the large distances from land are
demanding conditions for high accuracy GPS positions. A separate study is needed
to investigate the options available.
5.3.2 Alternate offset measurement techniques
The derivation of x, y and z offsets of the subsea structures are attained in the
fabrication yard using total stations. There are however other options available and
these should be investigated in a separate study to determine the best technique
choice.

_____________________________________________________________________________________ Page 59 of 62
5.3.3 Alternate Compatt base-plate design
The Compatt base-plate is simply a plug for slotting the Compatt into the hub.
From an engineering perspective, there is room for improving this mechanism so
that the Compatt can be aligned automatically with the hub alignment mark. This is
an engineering consideration and alternative designs need to be explored.
5.3.4 Gyrocompass end-cap for Compatts
This is a new implementation of existing technology. The possibility,
appropriateness and functionality need consideration in a separate study.
5.3.5 Other new technologies
There are few technology alternatives for metrology, as has been discussed in
chapter 4. The implementation of and further research in new techniques and
technologies should be an ongoing endeavour and the subject of future
investigation.
5.4 Conclusion: chapter 5 In conclusion, it is apparent that there is a need for further investigation of the options
available to rigid spoolpiece metrology. This dissertation has outlined the requirements,
expectations and problems associated with a deep water metrology project. It culminates
in an analysis of the assembled data and the adequacy of current techniques and
equipment. It was found that there is not much room for improvement due to reasons
mentioned previously in this chapter. There is however, much opportunity for further
study and the development and application of new technologies.

_____________________________________________________________________________________ Page 60 of 62
APPENDIX A
PROJECT SPECIFICATION

_____________________________________________________________________________________ Page 61 of 62
University of Southern Queensland Faculty of Engineering and Surveying
ENG 4111/2 Research Project
PROJECT SPECIFICATION FOR: Jason Floyd FALKEN (0031138002) TOPIC: Critical review of techniques for rigid spoolpiece
metrology observation and reduction. SUPERVISOR: A/Prof. Frank Young ASSOCIATE SUPERVISOR: Tim Farrow, Subsea7 Ltd SPONSORSHIP: Subsea7 Ltd, Aberdeen Scotland PROJECT AIM: An analysis will be made to quantify sources of
error, correct use and application of measurements taken, effects of sensor accuracy and precision on final reductions and the adequacy of the existing techniques.
PROGRAMME: Issue B, 20th October 2005 1. Briefly review available literature and common practises, with reasoning towards
need for further investigation into techniques. 2. Investigate minimum dataset requirements and determine basic mathematical
procedures for data reduction. 3. Evaluate and review instrumentation requirements and sensor accuracies and
precisions. 4. Research and investigate sources of environmental and instrument error. 5. Research typical tolerance requirements for spoolpiece metrology and fabrication. 6. Critically examine and analyse surveying techniques used for collection of dataset. 7. Investigate and review alternate techniques for measurement of inclinations,
bearing, distance and heighting, with particular emphasis on the effect of network design for 3D solutions in a least squared adjustment.
8. Investigate and review effects of sources of error on data quality and compliance to tolerance requirements.
9. Investigate and review techniques for data redundancy and error reduction. 10. Design alternate procedure for collection and reduction of metrology data, if deemed
necessary. 11. Evaluate and analyse outcome of chosen procedure. 12. Complete dissertation and submit. AGREED: ______Jason FALKEN_________________________ ___/___/___ ______Frank YOUNG__________________________ ___/___/___

_____________________________________________________________________________________ Page 62 of 62
REFERENCES
CNR BAOBAB FIELD DEVELOPMENT (08/12/2004): Survey and Positioning
Procedure MV Maersk Winner BAO-TEC-PP-PRO-32935
CNR BAOBAB FIELD DEVELOPMENT (08/12/2004): Flexible and Rigid Spoolpiece
Metrology Procedure BAO-TEC-PP-PRO-32932
LARSON AND EDWARDS (2000): Elementary Linear Algebra
SONARDYNE INTERNATIONAL LIMITED (24/04/1997): Acoustic Positioning
Training Course Lecture Notes
ROBERT H. STEWART, TEXA A&M UNIVERSITY (2002): Introduction to Physical
Oceanography
IXSEA S.A.S (08/2005): Octans User Guide MU/3453/EGF/003/D
SONARDYNE INTERNATIONAL LIMITED (28/10/2003): Compatt Mk4 Product
Brief
SONARDYNE INTERNATIONAL LIMITED (20/06/2001): Maintenance Manual
EHF Compatt Mk4
PAROSCIENTIFIC, INC. (10/2004): User’s Manual for Digiquartz Broadband
Intelligent Instruments
CNR BAOBAB FIELD DEVELOPMENT DCS (15/10/2004): Production Manifold
Dimensional Control Results ET0141E-I005/GO
SEAMANSHIP, INTERNATIONAL (06/11/2003): The Character of the Tide