P09011 – Object Recognition - 1/9/2009. Functional Decomposition, Simplified by System Connecting...
17
SYSTEM LEVEL DESIGN PROGRESS REPORT P09011 – Object Recognition - 1/9/2009
-
Upload
patrick-hawkins -
Category
Documents
-
view
216 -
download
0
Transcript of P09011 – Object Recognition - 1/9/2009. Functional Decomposition, Simplified by System Connecting...

SYSTEM LEVEL DESIGN PROGRESS
REPORTP09011 – Object Recognition - 1/9/2009

Functional Decomposition,Simplified by System
Connecting Object
Method
Apparatus Connection Device
Object Connection Device

System for Connecting Object to Apparatus
Method•Rope•Solid link (rod)•Fishing line•Coax•Nylon webbing
Apparatus Connection
Device
•Hinge•Knot•Eyebolt•Glue•Robot hand
Object Connection
Device•Magnet•Spring clip•Clevis pin•Vacuum•Master lock•Handcuffs•Suction cup•Threaded rod•Wire ties•Velcro•Snaps•Hook•Lasso•Clothespins•Robot hands•Suction•Squeeze-release buckles

System for Raising/Lowering Object
Method•Rope over pulley•Chain•Pivoting Arm•Rolling Wheel•Drop on Bungee•Drop on Springs•Lowering Cylinder•Drive Screw•Electromagnets•Birds/Butterflies•Spring Loaded Retraction
Power•Human•Battery•External (AC)•Pneumatic•Hydraulic
Control•Direct human power•Foot pedal•Handheld remote•Crank•Fishing Reel•Pump

System for Hiding Objects from Trainer
Method•Canvas Shade•Screen•One-Way Mirror•Cover•Panel•Umbrella•Virtual Reality/Camera
Location•On face of trainer•On apparatus•On apparatus extension•Independent of apparatus

System for Removing/Switching Object
Sets
Method
•By Hand•Motorized•Staged Attachment
Timing• After each
object set (apparatus contains one set at a time)
• After both object sets (apparatus contains both sets at a time)
Operator
•Trainer•Experimenter

Primary Design Criteria
Operator and whale safe
Quiet Durable &
weatherproof No external power Able to hide sample
from trainer Compact
Able to block whale’s view of both object sets at once
35” total design width
3-5sec target time between object set display, 10sec max
10lb max object weight

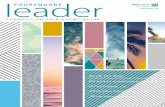
Concept C: Overview
Objects sets raised and lowered independently on cables
Cable movement provided by separate electric winches
Winches controlled remotely
Object travel electronically limited
Powered by on-board 12V battery

Concept C: Overview

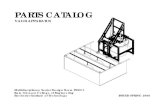
Concept F: Overview
Object sets raised and lowered independently on cables connected to pivoting arms
Pivoting arms are positioned 90 degrees to one another
Upper section of apparatus rotates on human-powered turntable to change object sets
Pivoting arm movement provided by electric linear actuators (expanding cylinder)
Linear actuators controlled remotely
Object travel electronically controlled by limit switches
Powered by on-board 12V battery

Concept F: Overview

Concept F: Overview

Concept Feasibility Comparison
Concept C Concept FCan our system be designed? Yes YesDo we understand what we are trying to do and have we decomposed the design adequately to insure our understanding and to enable the clear assignment of responsibilities? Yes Yes
Is the technology available and robust? Available, possibly
robust Available, robustIs the design likely to meet all engineering specifications and satisfy the customer? Possibly PossiblyHave we addressed all required features and functions? Yes YesDo we understand the performance limits of our design and whether these limits are acceptable? Yes YesDo we have the capabilities and resources (people, funds, time) to realize our design (before investing heavily in engineering activities)? Possibly Possibly

Feedback Received
Dr. Varela: Search McMaster and Grainger for off-the-shelf
winchesAvoid trying to build your own winch setup
Dr. Walter:When considering design feasibility, don’t forget to
perform evaluation of battery requirements for electrically powered design
Consider and evaluate safety concerns with electricity flowing through apparatus, remote control
Look at MSD# P06606 (Remote Operated Aquatic Motorized Explorer) for underwater electronics shielding

Component Analysis
Research into winches yielded that they:○ Are designed for much higher loads and much
slower speeds○ Do not meet customer’s weight requirements
– heavy (100-150lbs)○ Do not meet customer’s time requirements –
run too slow (3-40 feet per minute)○ Do not meet duty cycle requirements○ Have varying costs – some fall well within
budget, some well outside Look for servos, stepper motors, etc.
that fit design.

Component Analysis
Research into linear actuators yielded that they:○ Are designed to meet our requirements
for weight, load capacity, speed, and duty cycle
○ Have varying costs – some fall well within budget, some well outside
Get quotes to determine if component fits budget constraints

Next Steps Complete Risk Assessment Gain more information about
components Select single concept Complete detailed design