
P d th l tPower and thermal management - unitn.itfontana/GreenInternet/CISCO Workshop on...
30
P d th l t P d th l t Power and thermal management Power and thermal management Tajana Šimunić Rosing Tajana Šimunić Rosing UCSD
Transcript of P d th l tPower and thermal management - unitn.itfontana/GreenInternet/CISCO Workshop on...

P d th l tP d th l tPower and thermal managementPower and thermal management
Tajana Šimunić RosingTajana Šimunić Rosing
UCSD

MotivationMotivationPower consumption is a critical issue in system design today
Mobile systems want maximum battery lifetimeHigh performance systems need to reduce the electricity costsHigh performance systems need to reduce the electricity costs
• Power and cooling
Electricity cost devoted to powering and cooling USA data centers can power 10 Icelands!
TŠR

Power and Thermal ManagementPower and Thermal ManagementReducing power ≠ lower thermal densityPower management
Sleep states – DPMPerformance states – DVFS
Thermal managementThermal Hot Spots
• High leakage power• High leakage power• Degraded reliability• Increased interconnect resistivity
Spatial and Temporal GradientsSpatial and Temporal Gradients• Higher permanent failure rates• Timing failures• Increased interconnect delay and IR drop
TŠR
Increased interconnect delay and IR drop

Our Recent WorkOur Recent Work
Dynamic power management (DPM)O ti l t f t ti kl d• Optimal power management for stationary workloads
• Machine learning to adapt in non-stationary environments• Select among specialized policies• Use hardware performance counters to adapt• Use hardware performance counters to adapt
voltage/frequency settings at run time • Measured large power savings in real systems
Dynamic thermal management (DTM)• Workload scheduling:
• Comparison between power only and thermal management• Comparison between power only and thermal management• Runtime adaptation to get best temporal and spatial profiles• Negligible performance overhead
• Accurate run-time temperature estimation
TŠR
Accurate run time temperature estimation• Limited number of thermal sensors in suboptimal locations

DPM: Workload modeling - Idle StateDPM: Workload modeling - Idle State
11 10 100 1000
Hard Disk Trace
bE −1Pareto Distribution:
0 001
0.01
0.1
Tail
dist
ribut
ion Pareto
Experimental
WWW T
buser taE −⋅−= 1
0.0001
0.001T Exponential
WWW Trace
0.1
1
Telnet Trace
0.1
1
0.001
0.01
0.1
Experimental
Exponential 0.001
0.01 Experimental
Exponential
P t
TŠR
0.00010.01 0.1 1 10
Interarrival Time (s)
Pareto0.0001
0.01 0.1 1 10
Interarrival Time (s)
Pareto

DPM: TISMDP modelDPM: TISMDP model
Idle
departure Decision
A Q A Q=1A Q=2 arrival
Idle
i l
arrivaluniform
A,Qmax A,Q=1A,Q=2. . .
S,Q=1S,Qmax . . .arrival
S,Q=0no arrival
generalAssumptions: generalAssumptions:general distribution governs the first request arrival exponential distribution represents arrivals after the first arrivaluser, device and queue are stationaryuser, device and queue are stationary
Obtain globally optimal policy using linear programming
h d di k i hi f id l l li
TŠR
Measurements on hard disk within 11% of ideal oracle policyfactor of 2.4 lower than always-onfactor of 1.7 lower than default time-out

DPM: Hardware implementationDPM: Hardware implementationDPM: Hardware implementationDPM: Hardware implementation
Idle time Probability(ms) to sleep
Optimal PolicyOptimal PolicyLFSR for generating probability & policy logicController on entry to idle state:Controller on entry to idle state:
obtains a random number RND & finds a timeoutobtains a random number RND & finds a timeout (ms) to sleepjh p(jh)
0 0.0010 0.0020 0 12
obtains a random number RND & finds a timeout obtains a random number RND & finds a timeout value (value (jhjh) for which RND>p() for which RND>p(jhjh))if no arrival during if no arrival during jhjh seconds, the core enters sleep seconds, the core enters sleep state, otherwise it stays activestate, otherwise it stays active
30%40%50%60%
or (%
)
20 0.1230 0.4340 0.7550 0.8760 0 91
0%10%20%
3 8 13
Erro
Pow er Err
Penalty Err
60 0.9170 1.00
LFSR BitsSynposys synthesis
PolicyLFSR Regs
FPGA synthesisLFSR LFSR Regs Policy
TŠR
#FFs % area #gates % area5 14% 193 86%9 14% 417 86%
15 12% 855 87%
Bits # LABs M ax ns # LABs M ax ns5-15 1 4 2 35

DPM: Handling non-stationary workloads -Machine Learning for DPM
DPM: Handling non-stationary workloads -Machine Learning for DPM
DPM/DVS Experts (Working Set)Selected expert manages Selected expert manages
power for the idle period………..DPM 1 DPM 2 DPM 3 DPM n
Selects the best performing
Device
Se ects t e best pe o gexpert for managing power
Evaluates performance of allDPM Controller
TŠR
Evaluates performance of allexperts for that idle period
DPM Controller

Workload Characterization & V/f SelectionWorkload Characterization & V/f Selection
1 8gy
burn_loop
m em
com bo
2.3
emen
t
1.3
1.8
rmal
ized
Ene
rgC
onsu
mpt
ion
1.3
1.8
man
ce Im
prov
e
0.8200 300 400 500
No
0.8
1.3
200 300 400 500
F (MH )
Perf
orm
Frequency (M Hz) Frequency (MHz)
Three tasks burn_loop (CPU-intensive), mem (memory intensive) and combo (mix) run with static scaling.
burn_loop has nearly constant energy consumptionmem energy efficient at lowest v-f setting
Key observation:
TŠR
Key observation:CPU-intensive tasks don’t benefit from scalingMemory intensive tasks energy efficient at low v-f settings

DPM/DVFS: Controller AlgorithmDPM/DVFS: Controller AlgorithmScheduler tick or idle period startDo for t = 1,2,3…..T, ,
1. Calculate µ = CPIbase / CPIavg
2. Update weight vector of task:wi
t+1 = wit . [1-(1-ß). lossi
t (µ)]
∑ =
= N
iti
t
w
t
1
wr
3. Choose expert (1,2,3…N) with highestprobability factor in rt :
4. Apply the v-f/DPM settings.5. Reset and restart the Perf. Monitoring Unit
CPI =CPI +CPI +CPI +CPI +CPICPIavg=CPIbase+CPIcache+CPItlb+CPIbranch+CPIstall
Performance converges to that of the best performing ( )
TŠR
Performance converges to that of the best performing expert with successive idle periods at rate ( )TNO /)(ln

Policies used in experimentsPolicies used in experimentsHard disk drive
Expert Characteristics
CPU: XscaleWorkloads:
qsort djpegExpert CharacteristicsFixed Timeout Timeout = 7*Tbe
Adaptive Timeout Initial timeout = 7*Tbe;Adjustment = +0.1Tbe/-0.1Tbe
Exponential Predictive I = a i + (1 a) IFreq(MHz)
Voltage (V)
qsort, djpeg, blowfish, dgzip
Exponential Predictive In+l = a in + (1 – a).In,with a = 0.5
TISMDP Optimized for delay constraint of 3.5% on HP-1 trace
(MHz) (V)
208 1.2
312 1.3
Trace Name
Duration(in sec)
HP-1Trace 32311 20 5 29
RIt RItσ416 1.4
520 1.5HP-1Trace 32311 20.5 29
HP-2 Trace 35375 5.9 8.4
HP-3 Trace 29994 17.2 2
: Average Request Inter-arrival Time (in sec)RIt
TŠR
RI

HDD results: Perf Delay/Energy SavingHDD results: Perf Delay/Energy Saving
With Individual ExpertsPolicy HP1 Trace HP2 Trace HP3 Trace
%delay %energy %delay %energy %delay %energy
Oracle 0 68.17 0 65.9 0 71.2
Timeout 4 2 49 9 4 4 46 9 3 3 55Timeout 4.2 49.9 4.4 46.9 3.3 55
Ad Timeout 7.7 66.3 8.7 64.7 6 67.7
TISMDP 3.5 44.8 2.26 36.7 1.8 42.3
Predictive 8 66.6 9.2 65.2 6.5 68
P efe ence HP 1 T ace HP 2 T ace HP 3 T ace
With ControllerLeast DelayMaximum Energy S i
Converges to TISMDPConverges to Predictive
Preference HP-1 Trace HP-2 Trace HP-3 Trace
%delay %energy %delay %energy %delay %energyLow delay
IVHi h
3.5 45 2.61 37.41 2.55 49.5
6.13 60.64 5.86 54.2 4.36 61.02
Savings
TŠR
High energysavings
6.13 60.64 5.86 54.2 4.36 61.02
7.68 65.5 8.59 64.1 5.69 66.28

HDD results: Frequency of SelectionHDD results: Frequency of Selection
80 00% Higher Lower
60.00%
70.00%
80.00%energy savings
Perf Delay
40.00%
50.00%
cy o
f sel
ectio
n
20.00%
30.00%
Freq
uenc
0.00%
10.00%
Fixed Timeout Predictive TISMDP Ad Timeout
TŠR

DVS: Single Task EnvironmentDVS: Single Task Environment
Bench. Low perf delay -------> Higher energy savings Bench. 208MHz/1.2V
%d l %
Single task environment – energy savings up to 50%
%delay %energy %delay %energy %delay %energy
qsort 6 17 16 32 25 41djpeg 7 21 15 37 26 45
%delay %energy
qsort 56 48djpeg 34 54ddgzip 15 30 21 42 27 49
bf 6 11 16 27 25 40
dgzip 33 54bf 40 51
Multitasking environment – energy savings close to 50%
Bench. Low perf delay -------> Higher energy savings%delay %energy %delay %energ
y%delay %energy
Multitasking environment energy savings close to 50%
yqsort+djpeg 6 17 15 33 25 41djpeg+dgzip 13 24 19 39 27 48qsort+djpeg 7 20 18 35 26 42
TŠR
dgzip+bf 13 18 22 32 27 44

DTM: Optimal power and thermal thread schedulingDTM: Optimal power and thermal thread scheduling
Minimize the energy consumption vs. get the optimal temperature distribution
Workload:
Precedence, timing, thermal characteristics
Optimal Schedule
ILP
System Properties:•Floorplan•Package
TŠR
g

DTM: Evaluation FrameworkDTM: Evaluation Framework
Inputs: • Workload information – measured on Niagara
S h d l
Workload information measured on Niagara• Floorplan, temperature (for dynamic policies)
Power ManagerDPM, DVS
SchedulerStatic: Fixed allocation (ILP)Dynamic: Dependent on the policy
Inputs:
S
p• Power trace for each unit• Floorplan, package and die
properties (Niagara-1)
Thermal SimulatorHotSpot [Skadron, ISCA’03]
TŠR
Transient Temp. Response for Each Unit

DTM: WorkloadDTM: Workload
Utilization (%)Thread Lengths
(ms)Cache Misses & FP
(per 100K instr)
avg min max avg max L2 I Miss L2 D Miss FP instr MIPS
Web - medium 53.12 28 82 2.7 134 12.9 167.7 31.2 3798
Web - high 95.87 70 100 2.7 268 67.6 288.7 31.2 5264
Database 17.75 0 42 0.4 268 6.5 102.3 5.9 1522Database 17.75 0 42 0.4 268 6.5 102.3 5.9 1522
Web & Database 75.12 37 94 0.8 536 21.5 115.3 24.1 4635
INT - gcc 15.25 0 33 7.2 268 31.7 96.2 18.1 1737
INT - gzip 9 0 30 6.3 536 2 57 0.2 1114
10000
100000
1000000
10000000
1
10
100
1000
10000
TŠR
4 us
8 us
16 u
s32
us
65 u
s13
1 us
262
us52
4 us
1 m
s2
ms
4.2
ms
8.4
ms
16.7
ms
33.5
ms
67.1
ms
8 us
16 u
s32
us
65 u
s13
1 us
262
us52
4 us
1 m
s2
ms
4.2
ms
8.4
ms
16.7
ms
33.5
ms
67.1
ms
134.
2 m
s
Lengths
KERNEL USER

DTM: Policies compared DTM: Policies compared
Optimal and static:ILP-energyILP energy
• minimizes the overall energy consumptionILP-comb
• minimizes the thermal hot spots and the temperature gradientsp p g
Dynamic:Load balancing
• Balances threads for performance onlyp yCoolest-FLP
• Exploits the horizontal heat transfer on the die – schedules threads to cores with “idle” neighbors
Ad i R d P liAdaptive-Random Policy• Minimizes & balance temperature with low scheduling complexity• Probability of sending a workload to a core based on temperature history• Adapts to changes in temperature dynamics
TŠR
• Adapts to changes in temperature dynamics

Results: Thermal Hot SpotsResults: Thermal Hot Spots
1
1.2
0.6
0.8 >8580,8575 80bu
tion
0.2
0.4
75,80<75
Dis
trib
0Load Bl. Coolest-FLP AdaptRand ILP-energy ILP-comb
TŠR
Dynamic Optimal & static

DTM: Thermal CyclesDTM: Thermal Cycles%
) 1
1.2 Dynamic Optimal & Static
tribu
tion
(%
0 4
0.6
0.8 >2015,2010,15<10tri
butio
n D
is
0
0.2
0.4
Dis
Cycles to failure: N = Co (∆T) –q (q=4 for metallic structures) ∆T i f 10oC t 20oC
Load Bl. Coolest-FLP AdaptRand ILP-energy ILP-comb
TŠR
∆T increases from 10oC to 20oCFailures happen 16 times sooner
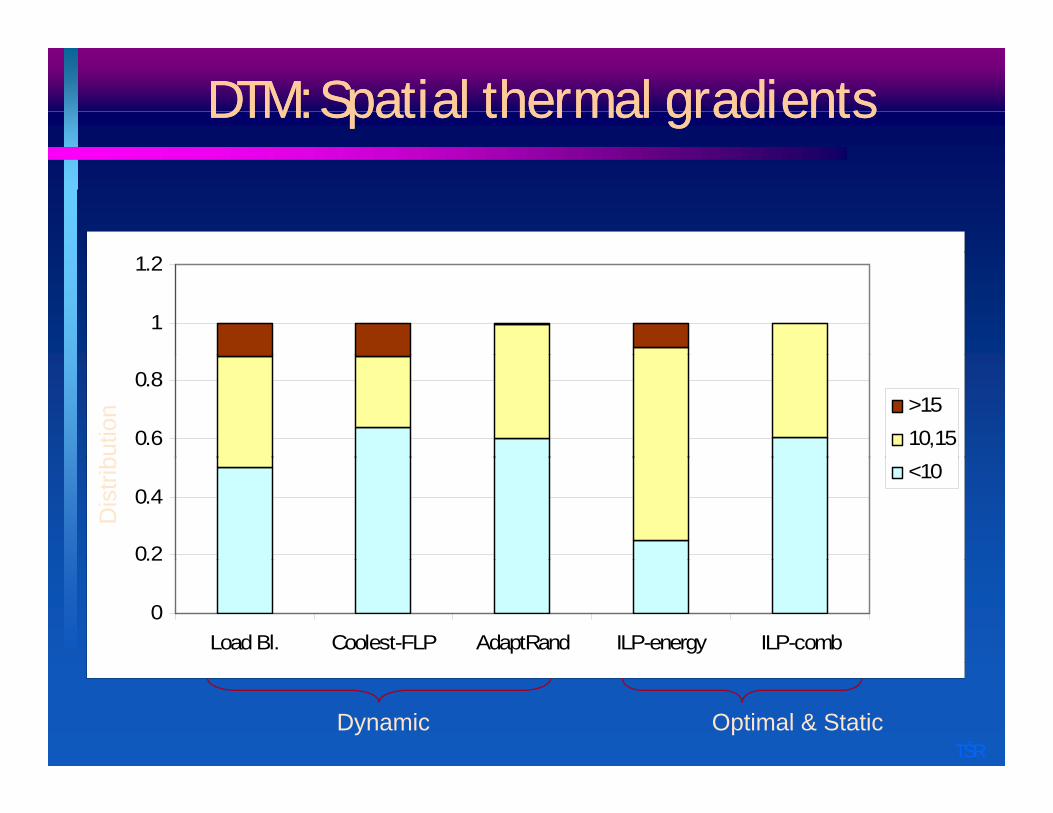
DTM: Spatial thermal gradientsDTM: Spatial thermal gradients
1
1.2
0.6
0.8>1510,15
butio
n
0.2
0.4<10
Dis
trib
0
0.2
Load Bl. Coolest-FLP AdaptRand ILP-energy ILP-comb
TŠR
Dynamic Optimal & Static

DTM: Online temperature measurementDTM: Online temperature measurement
Limited number of sensorsLimited number of sensors on a deviceSensor readings can be ginaccurate (noise, calibration, A/D quantization)
Accurate temperature estimates are often needed at the points other thanat the points other than sensor locations X Locations of Interest
1, 2 Sensor Locations
TŠR

DTM: Accurate Temperature EstimationDTM: Accurate Temperature Estimation
Offline phase (Setup) Online phase (Estimation)Offline phase (Setup) Online phase (Estimation)
Model Order Reduction
Thermal Model
Inaccurate Temperature I f ti
Inaccurate Power
E ti t
Reduced Order Thermal Model
Information Estimates
Kalman Filter Generation
Kalman FilterKalman Filter
Time UpdateMeasurement Update
Calibration
Steady State Kalman Filter
Accurate Temperature Estimates
TŠR

DTM: Results of online temperature estimationDTM: Results of online temperature estimation
Sensor MeasurementErrors (°C)
Temperature EstimationError (°C) We reduced:Errors ( C) Error ( C)
Number of Sensors
Mean Absolute
ErrorStd. Dev.
Mean Absolute
ErrorStd. Dev.
2 3 74 4 72 0 77 1 28
We reduced:Mean absolute temperature error by 5XStandard deviation of the
TŠR
2 3.74 4.72 0.77 1.28
3 3.72 4.60 0.76 1.27
4 4.41 5.50 0.75 1.27
5 3.29 3.94 0.76 1.27
Standard deviation of the error by 4X

ConclusionsConclusions
Power management can achieve large energy savings by exploiting variations in workload
TISMDP DPM/DVS policy optimized for stationary workloadsImplementable in hardware
Machine learning to optimally select among individual DPM/DVS policies
Minimizing power consumption does not always lead to optimal thermal profiles both in terms of hot spots and temperature gradientsprofiles both in terms of hot spots and temperature gradients
Thermal management:Very low overhead policies minimize hot spots and thermal gradientsDriven by sensors which can be inaccurate
Our temperature estimation uses sensor data to derive accurate
TŠR
thermal profiles online
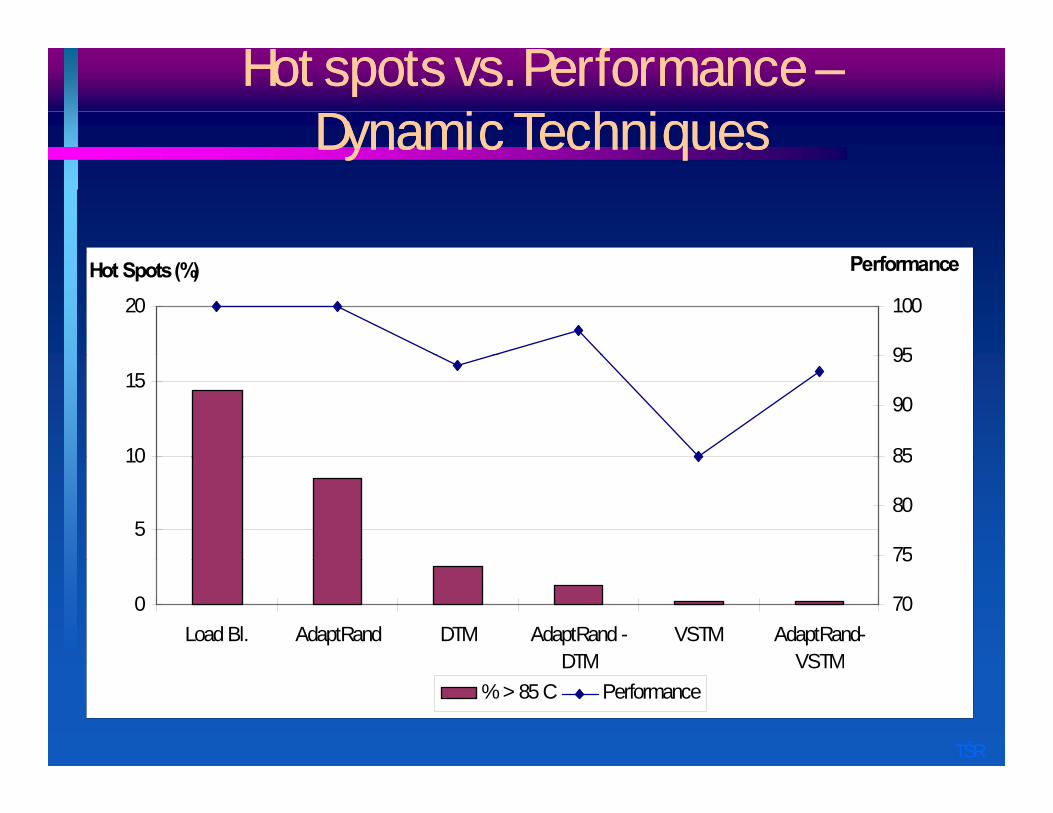
Hot spots vs. Performance –Dynamic Techniques
Hot spots vs. Performance –Dynamic Techniquesy qy q
20
Hot Spots (%)
95
100
Performance
10
15
85
90
95
5
10
75
80
85
0Load Bl. AdaptRand DTM AdaptRand -
DTMVSTM AdaptRand-
VSTM
70
75
TŠR
DTM VSTM% > 85 C Performance

DPM - Hard Disk Measurement ResultsDPM - Hard Disk Measurement Results
Policy is implemented using ACPI standard
Algorithm Power (W) Tss (s)using ACPI standard on the Hard Disk of Sony Vaio laptop running Win NT 5 0β
Oracle 0.33 118TISMDP 0.40 81Karlin's 0.44 79running Win NT 5.0β
measured real power consumption
30s Timeout 0.51 157120s Timeout 0.67 255Always on 0 95 0p
11 hr user trace
within 11% of ideal oracle policy
Always on 0.95 0Poisson 0.97 4
within 11% of ideal oracle policyfactor of 2.4 lower than always-onfactor of 1.7 lower than default time-
TŠR
out

Evaluation of experts (loss calculation)Evaluation of experts (loss calculation)
Intuition: Best suited frequency scales linearly with µ.Map task characteristics to the best suited frequency using µ-mapper.
{ 2 3 }
µ
e.g: Experts 1 to 5 = {100,200,300,400,500} MHzEvaluate experts against the best suited frequency.
0.1 0.3 0.5 0.7 0.9
0 0.2 0.6 0.80.4
µ
1.0
Expert1 µmean
Expert3 µmean
Expert4 µmean
Expert5 µmean
Expert2 µmean
TŠRwi
t+1 = wit . (1-(1-ß). lossi
t (µ)
What about Multi-tasking systems?What about Multi-tasking systems?
Tasks with different characteristics can execute togetherTasks with different characteristics can execute together.Weight vector (wt) characterizes an executing task.Need to personalize weight vector at the task level forNeed to personalize weight vector at the task level for accurate characterization.Solution: store weight vector as a task level structure
wt1 wt2 wt3 . . . wtn
TŠR

DVFS: Frequency of SelectionDVFS: Frequency of Selection
For qsortFor qsort
80low α
Higher energy
Lower Perf
50
60
70
elec
tion
medium αhigh α
energy savings
Perf Delay
30
40
quen
cy o
f Se
0
10
20Fre
TŠR
208MHz 312MHz 416MHz 520MHz


















