Overview
23
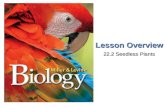
Overview Overview Motion correction Smoothing kernel Spatial normalisation Standard template MRI time-series Statistical Parametric Map General Linear Model Design matrix Parameter Estimates
description
Statistical Parametric Map. Design matrix. fMRI time-series. kernel. Motion correction. Smoothing. General Linear Model. Spatial normalisation. Parameter Estimates. Standard template. Overview. PHJ. a) Direct Normalization i ) Realign -> Slice Time* -> Normalization -> Smoothing - PowerPoint PPT Presentation
Transcript of Overview

OverviewOverviewOverviewOverview
Motioncorrection
Smoothing
kernel
Spatialnormalisation
Standardtemplate
fMRI time-series Statistical Parametric Map
General Linear Model
Design matrix
Parameter Estimates

PHJPHJa) Direct Normalization a) Direct Normalization
i) Realign -> Slice Time* -> Normalization -> i) Realign -> Slice Time* -> Normalization -> Smoothing Smoothing
b) Indirect Normalization b) Indirect Normalization
i)i) Realign -> Slice Time* -> Coregistration -> Realign -> Slice Time* -> Coregistration -> Segmentation -> Normalization ->Smoothing Segmentation -> Normalization ->Smoothing
* optional* optional

fMRI time-series
Motion corrected Mean functional
REALIGN
Lars KasperLars Kasper
33Signal, Noise and PreprocessingSignal, Noise and Preprocessing
RealignmentRealignment
Aligns all volumes of all runs spatially
Rigid-body transformation: three translations, three rotations
Objective function: mean squared error of corresponding voxel intensities
Voxel correspondence via Interpolation

Realignment Output: Realignment Output: ParametersParameters
Lars KasperLars Kasper
Signal, Noise and PreprocessingSignal, Noise and Preprocessing 44

The preprocessing sequence revistedThe preprocessing sequence revisted
RealignmentRealignment– Motion correction: Adjust for movement between Motion correction: Adjust for movement between
slicesslices
CoregistrationCoregistration– Overlay structural and functional images: Link Overlay structural and functional images: Link
functional scans to anatomical scanfunctional scans to anatomical scan
NormalisationNormalisation– Warp images to fit to a standard template brainWarp images to fit to a standard template brain
SmoothingSmoothing– To increase signal-to-noise ratioTo increase signal-to-noise ratio
Extras (optional)Extras (optional)– Slice timing correction; unwarpingSlice timing correction; unwarping

Co-registrationCo-registration
Term co-registration applies to any Term co-registration applies to any method for aligning imagesmethod for aligning images– By this token, motion correction is also co-By this token, motion correction is also co-
registrationregistration
However, term is usually used to refer to However, term is usually used to refer to alignment of images from different alignment of images from different modalities. E.g.:modalities. E.g.:– Low resolution T2* fMRI scan (EPI image) to Low resolution T2* fMRI scan (EPI image) to
high resolution, T1, structural image from the high resolution, T1, structural image from the same individualsame individual

Co-registration: Principles behind Co-registration: Principles behind this step of processingthis step of processing
When several images of the same When several images of the same participants have been acquired, it is participants have been acquired, it is useful to have them all in registeruseful to have them all in register
Image registration involves estimating a Image registration involves estimating a set of parameters describing a spatial set of parameters describing a spatial transformation that ‘best ‘ matches the transformation that ‘best ‘ matches the images togetherimages together

fMRI to structuralfMRI to structural
Matching the functional image Matching the functional image to the structural imageto the structural image– Overlaying activation on Overlaying activation on
individual anatomyindividual anatomy– Better spatial image for Better spatial image for
normalisationnormalisation
Two significant differences Two significant differences between co-registering to between co-registering to structural scans and motion structural scans and motion correctioncorrection– When co-registering to When co-registering to
structural, the images do not structural, the images do not have the same signal intensity have the same signal intensity in the same areas; they in the same areas; they cannot be subtractedcannot be subtracted
– They may not be the same They may not be the same shapeshape

Problem: Images are differentProblem: Images are different
Differences in signal intensity between the Differences in signal intensity between the imagesimages
Normalise to appropriate template (EPI to EPI; T1 to T1), then segmentNormalise to appropriate template (EPI to EPI; T1 to T1), then segment

SegmentationSegmentation
Use the gray/white estimates from the Use the gray/white estimates from the normalisation step as starting estimates of the normalisation step as starting estimates of the probability of each voxel being grey or white probability of each voxel being grey or white mattermatterEstimate the mean and variance of the Estimate the mean and variance of the gray/white matter signal intensitiesgray/white matter signal intensitiesReassign probabilities for voxels on basis ofReassign probabilities for voxels on basis of– Probability map from templateProbability map from template– Signal intensity and distributions of intensity for Signal intensity and distributions of intensity for
gray/white mattergray/white matter
Iterate until there is a good fitIterate until there is a good fit


Register segmented imagesRegister segmented images
Grey/white/CSF probability images for EPI Grey/white/CSF probability images for EPI (T2*) and T1(T2*) and T1
Combined least squares match Combined least squares match (simultaneously) of gray/white/CSF (simultaneously) of gray/white/CSF images of EPI (T2*) + T1 segmented images of EPI (T2*) + T1 segmented imagesimages

The preprocessing sequence revistedThe preprocessing sequence revisted
RealignmentRealignment– Motion correction: Adjust for movement between Motion correction: Adjust for movement between
slicesslices
CoregistrationCoregistration– Overlay structural and functional images: Link Overlay structural and functional images: Link
functional scans to anatomical scanfunctional scans to anatomical scan
NormalisationNormalisation– Warp images to fit to a standard template brainWarp images to fit to a standard template brain
SmoothingSmoothing– To increase signal-to-noise ratioTo increase signal-to-noise ratio
Extras (optional)Extras (optional)– Slice timing correction; unwarpingSlice timing correction; unwarping

NormalisationNormalisation
This enables:This enables:– Signal averaging across Signal averaging across
participants:participants:Derive group statistics -> generalise Derive group statistics -> generalise findings to populationfindings to populationIdentify commonalities and differences Identify commonalities and differences between groups (e.g., patient vs. between groups (e.g., patient vs. healthy)healthy)
– Report results in standard co-Report results in standard co-ordinate system (e.g. Talairach and ordinate system (e.g. Talairach and Tournoux stereotactic space)Tournoux stereotactic space)
Goal:Goal: Register images from different participants Register images from different participants into roughly the same co-ordinate system (where the into roughly the same co-ordinate system (where the co-ordinate system is defined by a template image)co-ordinate system is defined by a template image)

Matthew Brett

Standard spacesStandard spaces
The MNI template follows the convention of T&T, but doesn’t match the particular brain
Recommended reading: http://imaging.mrc-cbu.cam.ac.uk/imaging/MniTalairach
The Talairach Atlas The MNI/ICBM AVG152 Template

SPM: Spatial NormalisationSPM: Spatial Normalisation
SPM adopts a two-stage procedure to determine SPM adopts a two-stage procedure to determine a transformation that minimises the sum of a transformation that minimises the sum of squared differences between images:squared differences between images:
Step 1:Step 1: Linear transformation (12-parameter affine) Linear transformation (12-parameter affine)Step 2:Step 2: Non-linear transformation (warping) Non-linear transformation (warping)
High-dimensionality problemHigh-dimensionality problemThe affine and warping transformations are The affine and warping transformations are constrained within an empirical Bayesian constrained within an empirical Bayesian framework (i.e., using prior knowledge of the framework (i.e., using prior knowledge of the variability of head shape and size): “variability of head shape and size): “maximum a maximum a posteriori” posteriori” (MAP)(MAP) estimates of the registration estimates of the registration parametersparameters

Step 1: Affine TransformationStep 1: Affine Transformation
Determines the Determines the optimum 12-parameter optimum 12-parameter affine transformation to affine transformation to match the match the sizesize and and positionposition of the images of the images12 parameters = 3 12 parameters = 3 translations and 3 translations and 3 rotations (rigid-body) + rotations (rigid-body) + 3 shears and 3 zooms3 shears and 3 zooms
Rotation Shear
Translation Zoom

Step 2: Non-linear RegistrationStep 2: Non-linear Registration
Assumes prior approximate Assumes prior approximate registration with 12-parameter registration with 12-parameter affine stepaffine step
Modelled by linear Modelled by linear combinations of smooth combinations of smooth discrete cosine basis functions discrete cosine basis functions (3D)(3D)
Choice of basis functions Choice of basis functions depend on distribution of warps depend on distribution of warps likely to be requiredlikely to be required
For speed and simplicity, uses For speed and simplicity, uses a “small” number of a “small” number of parameters (~1000)parameters (~1000)

Matthew Brett

2-D visualisation 2-D visualisation (horizontal and vertical (horizontal and vertical deformations):deformations):
BrainBrain visualisation:visualisation:
Ashburner; HBF Chap 3
Source
Deformation field
Warped image
Template

SMOOTH
GLMMNI Space
SmoothingSmoothing
Signal, Noise and Signal, Noise and PreprocessingPreprocessing 2222
Why blurring the data?Why blurring the data? Improves spatial overlap by blurring over Improves spatial overlap by blurring over
anatomical differencesanatomical differences Suppresses thermal noise (Suppresses thermal noise (averagingaveraging)) Increases sensitivity to effects of similar Increases sensitivity to effects of similar
scale to kernel (scale to kernel (matched filter theoremmatched filter theorem)) Makes data more normally distributed Makes data more normally distributed
((central limit theoremcentral limit theorem)) Reduces the effective number of multiple Reduces the effective number of multiple
comparisonscomparisons
Lars KasperLars Kasper
How is it implemented? Convolution with a 3D Gaussian
kernel, of specified full-width at half-maximum (FWHM) in mm

SmoothingSmoothingLars Kasper: A ToolboxLars Kasper: A Toolbox
2323