
Order Reduction of MIMO System using Modified Cauer...
5
© 2017, IJARCSMS All Rights Reserved 56 | P age ISSN: 2321-7782 (Online) e-ISJN: A4372-3114 Impact Factor: 6.047 Volume 5, Issue 9, September 2017 International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online at: www.ijarcsms.com Order Reduction of MIMO System using Modified Cauer Form and Factor Division Method Harshita Mittal 1 Shobhit University, Gangoh Saharanpur – India Dr. Jasvir Singh Rana 2 Shobhit University, Gangoh Saharanpur – India R. P Agarwal 3 Shobhit University Meerut – India Abstract: In this paper, a combination of modified Cauer form and factor division method has been applied for high order linear dynamic multi-input-multi-output (MIMO) system. In this technique, the denominator polynomial of the reduced order model is derived by using the modified Cauer form while the numerator coefficients are obtained by using factor division method The reduction procedure is simple computer oriented and the approach is comparable in quality with the other well-known reduction techniques. Also, the proposed method guarantees stability of the reduced model if the original high-order MIMO system is stable. The proposed approach of MIMO system order reduction is illustrated with the help of an example and the results are compared with the recently published other well-known reduction techniques to show its superiority. Keywords: Multi-input-multi-output (MIMO) system Modified Cauer Form; Order Reduction, Stability, Transfer Function. I. INTRODUCTION In present day technology, there are a large number of problems which are highly complex and large in dimension. In system theory the approximation of higher order system by lower order models is one of the important challenges. Because by using the reduced lower order model, the implementation of analysis, simulation and various system designs become easier. Various order-reduction methods are available for linear continuous time domain system as well as systems in frequency domain. Further, the extension of single input single-output (SISO) methods to reduce multi-input multi-output (MIMO) systems has also been carried out in [1]-[5]. II. STATEMENT OF THE PROBLEM Consider the nth order linear time invariant general MIMO system described in frequency domain by the rectangular function matrix [G(s)] [ ] Where (1) Where matrices of are appropriate dimension and are scalar constants. The elements of the transfer function matrix [G(s)] are rational functions of„s‟ of the form (2)
Transcript of Order Reduction of MIMO System using Modified Cauer...

© 2017, IJARCSMS All Rights Reserved 56 | P a g e
ISSN: 2321-7782 (Online) e-ISJN: A4372-3114 Impact Factor: 6.047
Volume 5, Issue 9, September 2017
International Journal of Advance Research in Computer Science and Management Studies
Research Article / Survey Paper / Case Study Available online at: www.ijarcsms.com
Order Reduction of MIMO System using Modified Cauer Form
and Factor Division Method Harshita Mittal
1
Shobhit University, Gangoh
Saharanpur – India
Dr. Jasvir Singh Rana2
Shobhit University, Gangoh
Saharanpur – India
R. P Agarwal3
Shobhit University
Meerut – India
Abstract: In this paper, a combination of modified Cauer form and factor division method has been applied for high order
linear dynamic multi-input-multi-output (MIMO) system. In this technique, the denominator polynomial of the reduced
order model is derived by using the modified Cauer form while the numerator coefficients are obtained by using factor
division method The reduction procedure is simple computer oriented and the approach is comparable in quality with the
other well-known reduction techniques. Also, the proposed method guarantees stability of the reduced model if the original
high-order MIMO system is stable. The proposed approach of MIMO system order reduction is illustrated with the help of
an example and the results are compared with the recently published other well-known reduction techniques to show its
superiority.
Keywords: Multi-input-multi-output (MIMO) system Modified Cauer Form; Order Reduction, Stability, Transfer Function.
I. INTRODUCTION
In present day technology, there are a large number of problems which are highly complex and large in dimension. In
system theory the approximation of higher order system by lower order models is one of the important challenges. Because by
using the reduced lower order model, the implementation of analysis, simulation and various system designs become easier.
Various order-reduction methods are available for linear continuous time domain system as well as systems in frequency
domain. Further, the extension of single input single-output (SISO) methods to reduce multi-input multi-output (MIMO)
systems has also been carried out in [1]-[5].
II. STATEMENT OF THE PROBLEM
Consider the nth order linear time invariant general MIMO system described in frequency domain by the rectangular
function matrix
[G(s)]
[
]
Where
(1)
Where matrices of are appropriate dimension and are scalar constants. The elements of the transfer function matrix
[G(s)] are rational functions of„s‟ of the form
(2)

Harshita et al., International Journal of Advance Research in Computer Science and Management Studies
Volume 5, Issue 9, September 2017 pg. 56-60
© 2017, IJARCSMS All Rights Reserved ISSN: 2321-7782 (Online) Impact Factor: 6.047 e-ISJN: A4372-3114 57 | P a g e
The corresponding rth(k order model is of the form
[R(s)]=
=
(3)
Where are square matrices and are scalar constants
III. REDUCTION METHOD
The reduction procedure for getting the kth
-order reduced models consists of the following two steps:
Step-1: Determination of the denominator polynomial for the kth
-order reduced model using modified Cauer form by the
following procedure
By continuing the above sequence of expansion we get the following form
the quotients h1, h2, …………. H2, H1…….. are evaluated from the modified array
A reduced model of order k, is obtained by truncating equation (4) after the first 2kth terms and inverting it to yield the
transfer function formed out of the values of the quotients hj and Hj.
The reduced order denominator obtain by considering first 2k coefficients and inversion table
Step-2:
Determination of the numerator of kth order reduced model using Factor Division algorithm [12]
After obtaining the reduced denominator, the numerator of the reduced model is determined as follows
⁄ (5)
Where Dk(s) is reduced order denominator
By expressing N(s)Dk(s)/D(s) as N(s)/[D(s)/Dk(s)] and using factor division algorithm twice; the first time to find the term
up to sk-1
in the expansion of D(s)/Dk(s)(i.e. put D(s) in the first row and Dk(s) in the second row, using only terms up to sk-1
),
and second time with N(s) in the first row and the expansion [D(s)/Dk(s)] in the second row.
Therefore the numerator Nk(s) of the reduced order model (Rk(s)) in eq.(5) will be the series expansion of
∑
∑
About s=0 up to term of order sk-1
.
This is easily obtained by modifing the moment generating[14].which uses the familiar routh recurrence formulae to
generate the third, fifth, and seventh etc rows as,
Harshita et al., International Journal of Advance Research in Computer Science and Management Studies
Volume 5, Issue 9, September 2017 pg. 56-60
© 2017, IJARCSMS All Rights Reserved ISSN: 2321-7782 (Online) Impact Factor: 6.047 e-ISJN: A4372-3114 58 | P a g e
..................................................
Where
i=0,1,2,........................... i=0,1,2.......................
Therefore, the numerator of eq.(3) is given by
(s)=∑
IV. METHOD OF COMPARISON
An integral square error (ISE) in between the transient parts of the original and reduced model is calculated using
MATLAB to measure the goodness of the reduced order model i.e. lower the ISE, closer the RK(s) to Gn(s) , which is given by
ISE=∫ | |
dt
Where, y(t) and yK(t) are the unit step responses of original and reduced system respectively.
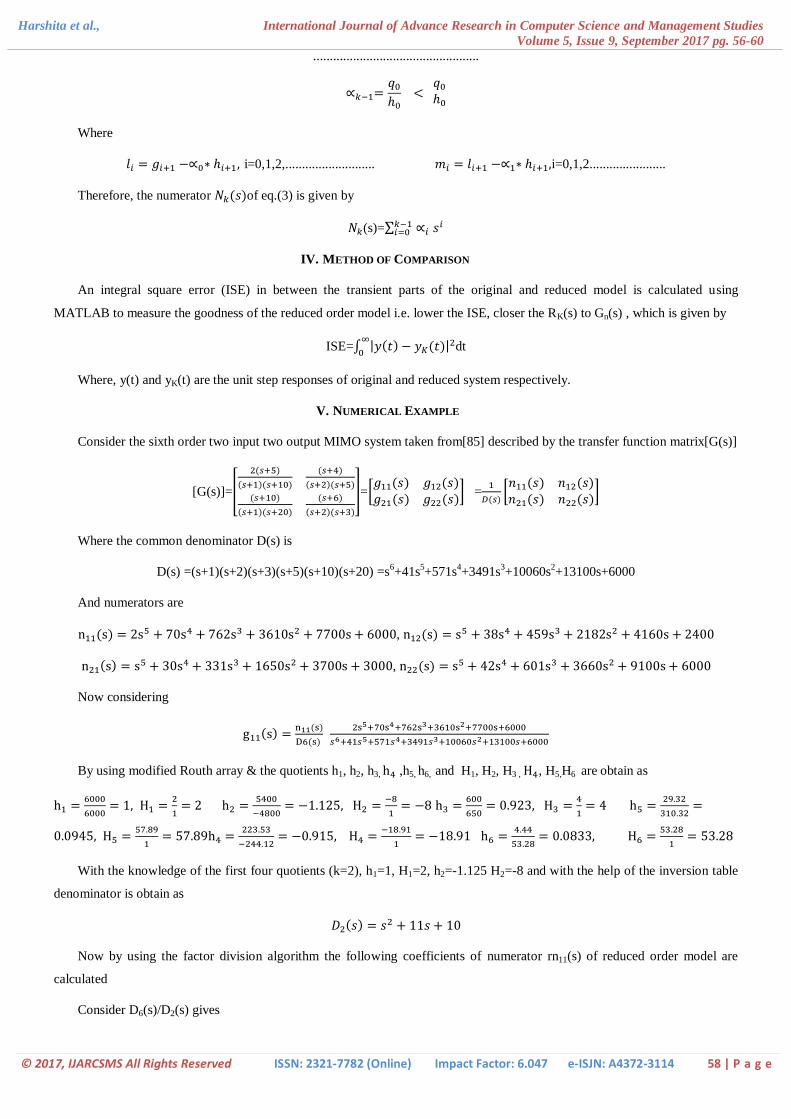
V. NUMERICAL EXAMPLE
Consider the sixth order two input two output MIMO system taken from[85] described by the transfer function matrix[G(s)]
[G(s)]=[
]=[
] =
[
]
Where the common denominator D(s) is
D(s) =(s+1)(s+2)(s+3)(s+5)(s+10)(s+20) =s6+41s
5+571s
4+3491s
3+10060s
2+13100s+6000
And numerators are
,
,
Now considering
By using modified Routh array & the quotients h1, h2, h3, ,h5, h6, and H1, H2, H3 , , H5,H6 are obtain as
With the knowledge of the first four quotients (k=2), h1=1, H1=2, h2=-1.125 H2=-8 and with the help of the inversion table
denominator is obtain as
Now by using the factor division algorithm the following coefficients of numerator rn11(s) of reduced order model are
calculated
Consider D6(s)/D2(s) gives

Harshita et al., International Journal of Advance Research in Computer Science and Management Studies
Volume 5, Issue 9, September 2017 pg. 56-60
© 2017, IJARCSMS All Rights Reserved ISSN: 2321-7782 (Online) Impact Factor: 6.047 e-ISJN: A4372-3114 59 | P a g e
6 131
1 11
65
1
,
= Now considering
,
Thus Reduced Numerator is given as Rn11(s) = 10+2s Thus the Reduced model is given as
Similarly other reduced order models are as follows
Fig. Comparison of step response and frequency response of original and reduced order system
TABLE I COMPARISON OF REDUCTION METHODS Reduction method R11 R12 R21 R22
Proposed method 2.0750x10-4 3.451x10-5 2.242x10-4 4.63 x10-3
Vishwakarma and Prasad [14] 0.001515 7.845x10-5 2.9984x10-4 0.0047
Parmar et al. [15] 0.014498 0.00874 0.002538 0.01574
Prasad and Pal [16] 0.136484 0.00244 0.040291 0.06790
Safonov and Chiang [17] 0.590617 0.03712 0.007328 1.06612
Prasad et al. [18] 0.030689 0.00025 0.261963 0.021683
VI. CONCLUSION
The authors presented an order reduction method for the multi-input multi-output (MIMO) linear dynamic system of high
order systems. The modified Cauer form for determination of denominator polynomial of the reduced model while Factor
division algorithm is used for calculation of the numerators coefficients. The advantages of proposed method are stable,
simplicity, efficient and computer oriented. The proposed method has been explained with an example taken from the literature.
The comparison step responses and Bode plots of the original and reduced system are shown in the Figure-1. A quantitative
comparison of reduced order model obtain by proposed method with the original system is shown in the Table-I from which we
can conclude that proposed method is comparable in quality.
References
1. S. Mukherjee and R.N. Mishra,“Reduced order modelling of linear multivariable systems using an error minimization technique”, JournalofFranklin Inst.,
Vol. 325, No. 2 , pp. 235-245,1998.
2. S. S. Lamba, R. Gorez and B. Bandyopadhyay “New reduction technique by step error minimization for multivariable systems”,Int.J.Systems Sci., Vol. 19,
No. 6, pp. 999-1009,1988.
3. R. Prasad, A. K. Mittal and S. P. Sharma “ A mixed method for the reduction of multivariable systems”, Journal of Institute of Engineers, India, IE(I)
Journal-EL, Vol. 85, pp 177-181,2005
4. R. Prasad, “Pade type model order reduction for multivariable systems using Routh approximation”, Computers and Electrical Engineering, 26, pp.445-
459, 2000.
5. J.S. Rana, R. Prasad and R. Singh , “Order Reduction using modified Cauer form and Factor Division Method”, International Journal of Electrical,
Electronics and Data Communication, Vol. 2, pp 14-16, 2014.
6. V. Singh, D. Chandra and H. Kar, “Improved Routh Pade approximants: A Computer aided approach”, IEEE Trans. Autom. Control, 49(2), pp.292-296,
2004.
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Comparision of Step response between g11 and r11
Time (sec)
Am
plit
ud
e
g11
r11
-60
-50
-40
-30
-20
-10
0
Ma
gn
itu
de
(d
B)
10-2
10-1
100
101
102
103
-90
-45
0
Ph
as
e (
de
g)
Comparision of frequency response between g11 and r11
Frequency (rad/sec)
g11
r11
0 0.5 1 1.5 2 2.5 30
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Comparision of Step response between g12 and r12
Time (sec)
Am
plit
ud
e
g12
r12
-40
-30
-20
-10
0
Ma
gn
itu
de
(d
B)
10-1
100
101
102
-90
-45
0
Ph
as
e (
de
g)
Comparision of frequency response between g12 and r12
Frequency (rad/sec)
g12
r12
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Comparision of Step response between g21 and r21
Time (sec)
Am
plit
ud
e
g21
r21
-80
-60
-40
-20
0
Ma
gn
itu
de
(d
B)
10-2
10-1
100
101
102
103
-90
-45
0
Ph
as
e (
de
g)
Comparision of frequency response between g21 and r21
Frequency (rad/sec)
g21
r21
0 0.5 1 1.5 2 2.5 3 3.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Comparision of Step response between g22 and r22
Time (sec)
Am
plit
ud
eg22
r22
-40
-30
-20
-10
0
Ma
gn
itu
de
(d
B)
10-2
10-1
100
101
102
-135
-90
-45
0
Ph
as
e (
de
g)
Comparision of frequency response between g22 and r22
Frequency (rad/sec)
g22
r22

Harshita et al., International Journal of Advance Research in Computer Science and Management Studies
Volume 5, Issue 9, September 2017 pg. 56-60
© 2017, IJARCSMS All Rights Reserved ISSN: 2321-7782 (Online) Impact Factor: 6.047 e-ISJN: A4372-3114 60 | P a g e
7. Sastry G.V.K.R Raja Rao G. and Mallikarjuna Rao P., “Large scale interval system modeling using Routh approximants”, Electronic Letters, 36(8),
pp.768-769, 2000.
8. Chen. C.F and Shieh, L.S,‟ A novel approach to linear model simplification‟, Int. J. Control, Vol. 22, No.2, pp. 231-238, 1972.
9. Shieh, L.S. and Goldman, M.J., “Continued fraction expansion and inversion of the Cauer third form”, IEEE Trans. Circuits and Systems, Vol. CAS 21,
pp.341-345, 1974.
10. Chuang S.C. “Application of C.F methods for modeling Transfer function to give more accurate initial transient response”, Electronic letter 197 , pp 861-
863.
11. Shamash Y, “Stable reduced order models using Pade type approximants”, IEEE Trans. Autom. Control, Vol.AC-19, No.5, npp.615-616, October 1974.
12. T.N. Lucas,” Factor division: A useful algorithm in model reduction”2761D, 22nd August 1982.
13. Vishwakarma and Prasad, “MIMO System Reduction Using Modified Pole Clustering and Genetic Algorithm”, Hindawi Pub. Corp. Mod. And Sim. in
Engineering,
14. G. Parmar, R. Prasad, and S. Mukherjee, “Order reduction of linear dynamic systems using stability equation method and GA,”
International Journal of Computer, Information, and Systems Science, and Engineering, vol. 1, no. 1, pp. 26–32, 2007.
15. R. Prasad and J. Pal, “Use of continued fraction expansion for stable reduction of linear multivariable systems,” Journal of the Institution of Engineers,
vol. 72, pp. 43–47, 1991.
16. M. G. Safonov and R. Y. Chiang, “Model reduction for robust control:a schur relative error method,” International Journal of Adaptive Control and
Signal Processing, vol. 2, no. 4, pp. 259–272, 1988.
17. R. Prasad, J. Pal, and A. K. Pant, “Multivariable system approximation using polynomial derivatives,” Journal of the Institution of Engineers, vol. 76, pp.
186–188, 1995.
AUTHOR(S) PROFILE
Ms. Harshita Mittal, was born in Nakur (Saharanpur), U.P. India, in 1994. She received her B.Tech
degree with honor from Shobhit Institute of Technology Gangoh, Saharanpur U.P. India, in Electronics
and communication in 2014 with honor. Now currently she is pursuing her M.Tech degree from
Shobhit University Gangoh, Saharanpur U.P. India, She is always a brilliant student in her whole
academics. This paper is a part of her M.Tech degree work. Her research interest is „„Model Order
Reduction Of Multi Input and Multi output of Higher Order LTI System”.
Dr. J. S. Rana, was born in Wajirpur (Saharanpur) U.P, India, in 1976. He received B.Sc. degree from
Meerut University, India, in 1997, B.Tech. degree in Electronics & Instrumentation Engineering from
V.B.S Purvanchal University, Jaunpur India, in 2001 and M.Tech in Instrumentation Engineering from
the School of Instrumentation at Devi Ahilya University, Indore India, in 2006. He received his Ph.D.
degree from Shobhit University, Meerut in 2017. Presently, he is working as Assistant Professor in
Shobhit University, Gangoh (Saharanpur), India.
Dr. R. P. Agarwal, is a man of vast experience in Research, Development, Teaching and
Administration for more than years. He Born on March 4th, 1945 at Bina (MP, India), Dr. Agarwal
obtained his B.Sc. from Agra University, B.E.(Hons.) in Electronics & Telecommunication
Engineering from Jabalpur University (Govt. Engineering College) and M.E. in Electronics &
Telecommunication Engineering from Pune University (College of Engineering) in 1964,1967,1970
respectively.He joined Department of Electronics & Computer Engineering, UOR (Now IIT Roorkee)
as a Lecturer in 1970. In 1974, he was awarded Commonwealth Scholarship for pursuing higher
studies. He joined University of Newcastle upon Tyne, UK and completed PhD in 1977. He has a
wider experience of teaching, research, development, administration and of organization of
professional events of International and National levels of over 32 years. He has published over 80
technical papers in International and National journals at repute and conferences. He has guided 4
Ph.D. thesis and is currently guiding 3 more, apart from a number of B.Tech., AMIE, M.Phil. and
M.Tech. projects, seminars and dissertation. He is the author of 2 books and edited 5 proceedings of
National seminar.
















![Prims Algorithm and its Application in the Design of University …ijarcsms.com/docs/paper/volume3/issue10/V3I10-0040.pdf · 2015-11-02 · Minimum spanning tree. According to [3],](https://static.fdocuments.us/doc/165x107/5edc747bad6a402d66671e59/prims-algorithm-and-its-application-in-the-design-of-university-2015-11-02-minimum.jpg)

