Chapters 3-6 Relational Data Models, Relational Constraints, and Relational Algebra

Optimization of Graph Query onRelational Database
Nirav P. ChavdaRobinson College
A dissertation submitted to the University of Cambridgein partial fulfilment of the requirements for the degree of
Master of Philosophy in Advanced Computer Science
(Research Project - Option B)
University of CambridgeComputer Laboratory
William Gates Building15 JJ Thomson AvenueCambridge CB3 0FDUnited Kingdom
Email: [email protected]
June 14, 2012


Declaration
I Nirav P. Chavda of Robinson College, being a candidate for the M.Phil in
Advanced Computer Science, hereby declare that this report and the work
described in it are my own work, unaided except as may be specified below,
and that the report does not contain material that has already been used to
any substantial extent for a comparable purpose.
Total word count: 14,235
Signed:
Date:
This dissertation is copyright c©2012 Nirav P. Chavda.
All trademarks used in this dissertation are hereby acknowledged.


Acknowledgements
I would like to thank my supervisors Dr. Eiko Yoneki and Dr. AmitabhaRoy for their valuable time, many suggestions, inspiring feedback and regularmeetings regarding the research project. I highly appreciate the opportunitythat was provided me to work on this project which combines novelty withpracticality.
I would also like to thank my co-advisor Karthik Nilakant. He provided mewith exceptional help and tremendous support throughout the lifetime of thisresearch project. He dedicated countless hours of his private time to supportand I am extremely grateful for that.


Abstract
Graph data structures are being increasingly employed to model dynamic in-formation such as online social networks, transporation networks and proteinstructures. They are widely used due to the fact that they can represent realworld knowledge through an intuitive and flexible scheme. These data struc-tures allow intuitive interconnection between different nodes or componentsthrough edges. There can be more than one edge between a pair of nodesand each edge have a label which defines the relationship between connectednodes. Furthermore, graphs can easily capture real world dynamics throughaddition or removal of edges.
With the increase in popularity of graphs, various specialised graph databasehave arised such as Neo4j and Trinity. These NoSQL databases are designedso that they can be easily scaled and have high availability. However, thelegacy Relational Database Management Systems (RDBMS) have key advan-tages. They have been employed by various industries for long time and itsfeatures have evolved through extensive research that has been carried outon the relational model. It includes features such as transaction consistency,normalization and declarative query language. Furthermore, there are vari-ous RDBMS off-the-shelf products available which can be quickly deployed.Due to various desirable properties, the RDBMS continue to be used fordifferent applications. However, the relational database are not efficient onquerying graphs as it involves JOIN operation between tuples which is slowand has limitations.
This project aims to address this issue by applying efficient pre-fetching tech-niques to optimize graph query. A graph processing layer called Crackle wasalso built which achieves local caching at the application level. A set of ex-periements are conducted to evaluate the performance gain through Hierar-chical blocking technique. There was significant improvement in Small Worldby upto 8x followed by Random and Scale free graphs. The comparison testsbetween relational and graph database showed decrease in the performancegap between them. In some cases, the relational database outperformed thegraph database by 18% by using Hierarchical blocking. Clearly, this showshow Hierarchical blocking can achieve implicit pre-fetching through efficientgraph layout. This algorithm can be further extended by applying more tar-geted heurisitic based on the topology of underlying graph. However, thatwould make the blocking algorithm more graph-specific as opposed to beingdomain-indpendent which is what this project aims to explore.


Contents
1 Introduction 11.1 Aims . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Background and Related Works 42.1 Relational Versus Graph Database Model . . . . . . . . . . . . 42.2 Graph representation . . . . . . . . . . . . . . . . . . . . . . . 62.3 Sources of latency . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1 Between database and application . . . . . . . . . . . . 72.3.2 Between disk and database . . . . . . . . . . . . . . . . 8
2.4 Reducing latency . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.1 Caching at Crackle level . . . . . . . . . . . . . . . . . 92.4.2 Efficient prefetching . . . . . . . . . . . . . . . . . . . . 10
2.5 Prefetching and semantic locality . . . . . . . . . . . . . . . . 11
3 Hierarchical Blocking 133.1 Hot cache analysis of blocking effect . . . . . . . . . . . . . . . 21
4 System Overview 234.1 Caching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Data Preperation 275.1 Graph pre-processing . . . . . . . . . . . . . . . . . . . . . . . 28
5.1.1 H-blocking . . . . . . . . . . . . . . . . . . . . . . . . . 295.1.2 Randomization . . . . . . . . . . . . . . . . . . . . . . 31
6 Evaluation 346.1 Batch 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.1.1 Breadth First Search . . . . . . . . . . . . . . . . . . . 356.1.2 Depth First Search . . . . . . . . . . . . . . . . . . . . 376.1.3 Single Source Shortest Path . . . . . . . . . . . . . . . 39
6.2 Batch 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
i

6.2.1 Breadth First Search . . . . . . . . . . . . . . . . . . . 426.2.2 Depth First Search . . . . . . . . . . . . . . . . . . . . 436.2.3 Single Source Shortest Path . . . . . . . . . . . . . . . 44
6.3 Comparison with Neo4j . . . . . . . . . . . . . . . . . . . . . . 456.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.4.1 Effect of large node on H-bock layout . . . . . . . . . . 456.4.2 H-block efficiency based on nature of query . . . . . . . 486.4.3 Distance Effect . . . . . . . . . . . . . . . . . . . . . . 50
7 Future Works 52
8 Summary and Conclusions 55
ii

List of Figures
2.1 Block prefetching on road network . . . . . . . . . . . . . . . . 10
3.1 Memory hierarchy of a typical computer system with associ-ated access cycles for each level . . . . . . . . . . . . . . . . . 14
3.2 van Emde Boas layout scheme . . . . . . . . . . . . . . . . . . 153.3 Undirected graph and memory hierarchy inputs . . . . . . . . 203.4 Output in contiguous layout . . . . . . . . . . . . . . . . . . . 20
4.1 Layers of Crackle . . . . . . . . . . . . . . . . . . . . . . . . . 244.2 Example of cache implementation . . . . . . . . . . . . . . . 254.3 Extension of cache to include edge weight information . . . . . 26
5.1 Topology of Random, Small world and Scale free graphs (leftto right order) . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.2 Degree distribution . . . . . . . . . . . . . . . . . . . . . . . . 29
6.1 Relative distribution of H-block and irregular graph queriesbased on their duration . . . . . . . . . . . . . . . . . . . . . . 43
6.2 H-block Hn consisting of three smaller H-blocks correspondingto n− 1 memory level . . . . . . . . . . . . . . . . . . . . . . 47
6.3 Flow path of BFS query on an H-blocked graph that involvesswitching between the red, green and cyan blocks. Also de-picted is the corresponding memory layout . . . . . . . . . . . 49
6.4 Flow path of DFS query on a graph and its correspondingmemory layout . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.5 H-blocking on large nodes and its corresponding “DistanceEffect” in the memory layout . . . . . . . . . . . . . . . . . . 51
7.1 Sharding of H-blocks . . . . . . . . . . . . . . . . . . . . . . . 537.2 The unsymmetrical and symmetrical blocks are depicted by
red and blue boundaries respectively . . . . . . . . . . . . . . 54
8.1 Performance of H-blocking based on graph . . . . . . . . . . . 56
iii

8.2 Performance of H-blocking based on query . . . . . . . . . . . 57
iv

List of Tables
3.1 Hot cache BFS performance with different layouts . . . . . . . 22
6.1 Machine configuration . . . . . . . . . . . . . . . . . . . . . . 356.2 BFS test query results . . . . . . . . . . . . . . . . . . . . . . 356.3 DFS test query results . . . . . . . . . . . . . . . . . . . . . . 376.4 SSSP test query results . . . . . . . . . . . . . . . . . . . . . . 396.5 Fetches per query for BFS . . . . . . . . . . . . . . . . . . . . 426.6 Fetches per query for DFS . . . . . . . . . . . . . . . . . . . . 446.7 Fetches per query for SSSP . . . . . . . . . . . . . . . . . . . . 446.8 Comparison between Irregular, H-block and Neo4j . . . . . . . 45
v

vi

Acronyms
BFS breadth first search.DFS depth first search.SSSP single source shortest path.HBA hierarchical blocking algorithm.RDBMS relational database management system.WS small world graph.SF scale free graph.ER random graph.LRU least recently used.FIFO first in first out.LIFO last in first out.
vii

viii

Chapter 1
Introduction
In recent years, graph structured data are increasingly used in applications
ranging from social networks, bioinformatics to the semantic web. In a social
network, every person is represented as a node and there are many differ-
ent types of relationships that can exist which are represented as labelled
edges between the nodes. In bioinformatics, graphs are used to understand
metabolic chain reactions at cellular level and also interactions between differ-
ent proteins. Graphs are gaining wider usage as they provide a universal and
natural scheme to represent real world knowledge. In many domains of real
world applications, modelled information contains various interconnections
(represented as edges) which grow rapidly. For example, the number of active
users of Facebook networking site has grown to 900 million users and over
125 billion friendships [1], since starting in 2004. The BIND database con-
taining protein interaction networks has grown almost 10 times between 2002
and 2004 and has doubled since then. Also, the size of ASTRAL database
containing protein structures has grown 3 times since 2002 [4].
The increased use of graph structured data has led to several new database
systems based on graph models which are generally categorized under the
NoSQL database paradigm. Some of the prominent graph databases are
Neo4j [2], Microsoft Trinity [3] and AllegroGraph [5]. On the other hand,
the relational database are still widely used especially in large enterprise
1

applications where the data has reached its full growth and is not expected
to change significantly.
Compared to graph databases, the relational database is slow in executing
graph queries as the data is stored differently. Each entity is stored in a table
format and in order to add any new relation type, the structure has to be
modified. For example, if there is a table of a contact list and another table
of restaurant list, a new relation connecting a contact to his/her favorite
restaurant can be added in following ways:
1. Altering either of the two table so that there is a new column which
points towards the other as foreign key; or
2. Avoid altering either table and instead create a new table containing
two columns linking row from contact table to that of restaurant table.
These modifications makes altering a graph difficult in relational database.
However, this approach is beneficial as it handles data more efficiently by stor-
ing different objects as seperate relations. This in turn reduces redundant
information which is more likely to occur in large unnormalized relations.
Also, relational database do not support recursive relationships unlike graph
databases. This is due to the fact that they require complex JOINs which
are expensive in terms of performance. However, relational database man-
agement systems have several desireable properties that have been refined
over decades of research. These include reliable high volume batch data pro-
cessing and repeated transactions capability.Moreover, several organizations
have invested considerable time and money into these traditional database
systems. This motivates a research question of how graph data structures
can be efficiently stored in a relational database and how can graph queries
be optimized by analysing the causes and reducing the latencies that occur
at different stages of an execution path of query.
2

1.1 Aims
The primary objective of this project is to optimize query execution through
techniques such as prefetching and caching. Prefetching refers to loading of
graph nodes before they are required by a subsequent query. Since data-
fetch pattern for graph queries depend on the traversal path, it is more
likely that at the subsequent stage of a query, there will be need to load
neighbouring nodes of the current node. In such cases, it is beneficial to
preload the neighbourhood in order to reduce the number of calls made to
database instance. This project will largely focus on one such technique called
H-blocking which refers to a Hierarchical blocking algorithm [26] on graph
data. This aims to reduce data block faults between any two consecutive
levels of a computer’s memory hierarchy.
Whenever an application requests for data from a database instance, it in-
troduces network delay in the case of distributed systems and inter-process
delay within a system. In order to reduce this lag, a caching layer was also
built which first attends to any node requests before forwarding the request
to database.
In order to evaluate the performance of different graph queries using these
optimization techniques, a graph-processing layer called Crackle was designed
and built on the JVM.
The aim of the evaluation is to assess the impact of prefetching and caching
techniques on the performance of some basic graph queries such as Breadth
First Search (BFS), Depth First Search (DFS) and Single Source Shortest
Path (SSSP). In addition, different types of graphs are used for evaluation,
in order to understand how their underlying structure affect the query cost.
This in turn determines its performance.
Furthermore, the performance of this system using a relational database is
compared with a graph-specific database, with the overall aim to reduce
performance gap between the two.
3

Chapter 2
Background and Related Works
First the differences that exist between relational and specialized graph databases
will be discussed in order to understand the key advantages that relational
database offer. This will be followed by brief discussion on some of the major
schemes to represent graph data on relational model. Following that, some
of the main sources of latency in a typical SQL query will be explored along
with techniques to reduce them. The final section will briefly discuss related
prefetching approaches and distributed storage.
2.1 Relational Versus Graph Database Model
The relational database is designed for mission-critical applications where
data reliability is very important. The main features can be expressed
through the ACID acronym which stands for Atomicity, Consistency, Iso-
lation and Durability. The data is atomic which means during a transaction
(single logical operation), if any part of the process fails, then the whole
transaction fails. This ensures that at the data state changes only when a
transaction completes successfully. The data is also consistent, which implies
that it follows certain predefined rules based on table structure, constraints
and triggers. It is also important to ensure that separate transactions do not
4

interfere and ensure data reliability. Such transactional isolation is achieved
through implementation of various levels of concurrency and lock control.
Finally, durability ensures that once a transaction has been committed, the
changes are secured into non-volatile memory even in case of system crash or
power failure. The normalisation scheme provided by the relational database
provides reduced data redundancy as it maintains only one version of data
at any given time. This in turn reduces the cost of storage as well as the
programming workload of maintaining consistency across multiple versions.
Also unlike the graph database, it provides a neat separation of concerns by
separating the programming aspects of handling data from the optimization
aspects of the database. It is based on a declarative SQL language that elim-
inates side effects during query execution. Due to these desirable properties,
the relational database are still widely used.
A range of competing vendors provide off-the-shelf products based on this
model, which can be deployed very quickly. Additionally, through parallel
database approach, it is possible to utilize multiprocessor architechture to
achieve parallel execution of operations such as merge, sort and join. This in
turn can ensure high-availability. The relational model also offer the advan-
tage allowing easy implementation of sharding. Sharding is a scheme used
to distribute the content of larger databases, whereby sets of data rows are
split across different servers ensuring that related rows from multiple tables
are co-located for faster graph traversal. Data distribution is more compli-
cated for graph databases. For example, Neo4j uses a central controller to
link multiple sub graphs whereas Trinity uses distributed controller for each
server.
Graph databases are generally based on the BASE acronym that stands for
“Basically Available, Soft state and Eventually consistent”. It is useful in
cases where there is no need for high availability and real time transactions
(consistency). This comes as a trade-off to its highly scalable characteristic
that is useful for start-ups and rapidly growing industries. This contrasts
with the relational databases, which tends to be used in data critical appli-
cations such as banking, payroll and inventory control systems [10]. This
5

makes it important to research on how graph queries can be made more
efficient using relational databases.
2.2 Graph representation
Before considering various methods to optimize graph queries, it would be
useful to understand different ways to store graph data structures using the
relational model. Some of the standard ways of representing a graph are
through adjacency list, adjacency matrices and edge-lists.
In the adjacency list scheme, a graph is represented by a linked list of nodes
where each node has its ID and pointer to next node. In addition there is a
list that contains pointers to successors of each node.
typedef struct NODE *LIST;
struct NODE {
int nodeID;
LIST next;
};
LIST successor[MaxNumOfNodes];
The adjacency matrix represents a graph using a two dimensional matrix
where each element indicates an edge between any given row and column
which correspond to two nodes.
Boolean edge[MaxNumOfNodes][MaxNumOfNodes];
While the former is useful to represent sparse graphs, it is more efficient to
use an adjacency matrix for dense graph such that e > n2/64 , where e is
the number of edges present, n is the maximum number of nodes and so its
square is the total number of binary relations possible in the given graph
[11].
The edge-list scheme allows simple representation of graph where binary re-
lations can be added or removed easily. It consists of a two columned matrix
indicating an origin and destination node in case of directed graphs. For undi-
6

rected graph, every edge is treated as bidirectional and one way to represent
this is by including reciprocal of every edge in the matrix. Due to the fixed
tabular design, it can be easily used in a relational database. Given these
benefits along with the fact that the origin and destination nodes of an edge
can be indexed, this scheme was chosen for the purpose of experimentation.
2.3 Sources of latency
It is important to understand what constitutes the majority of the processing
time of a typical SQL query. The major sources of latency introduced during
the execution path of a query can be classified as follows:
2.3.1 Between database and application
When any node information is needed, a query is made to database. Re-
lational databases such as MySQL [6] and PostgreSQL [7] are queried over
database connectivity driver such as JDBC in the Java environment. These
drivers convert incoming request calls into DBMS’s native procedure calls
using socket interface. As such, every call made to a database instance in-
troduces network delay depending on whether the server is deployed locally
or is remotely accessed.
Currently, the cost of disk storage and DRAM is getting cheaper per byte of
data storage. However, access times and bandwidths are not improving at the
same pace [8]. This uneven ratio requires a better approach to managing data
storage and cache-aware DBMS (Database Management System) algorithms.
In order to minimize the effect of this delay, a local caching layer can be
implemented at the application level. This technique will be discussed in the
next section.
7

2.3.2 Between disk and database
When any information is requested for a node, it is first scanned in the
PostgreSQL cache. In Linux, PostgreSQL utilizes the operating systems file
caching system based on the Least Recently Used (LRU) scheme. As such,
the cache used by PostgreSQL consists of blocks of 4KB, each equivalent to
a single page size.
When information for any particular node is not present in cache, there is a
cache-miss, which results in data being fetched from disk. This introduces
disk latency as follows [13]:
Latency = Seek time+Rotationaldelay+Transfer time+Controllerdelay
Where, seek time is the amount of time it takes for disk arm to physically
move from its current track to the track where requested data is stored. The
rotational delay is time taken for the disk to rotate the sector containing
requested data to the position of disk arm. Transfer time refers to the I/O
path delay of transferring data from the disk to the main memory. The disk
controller device which controls disk internally also introduces delay. The
total delay would be in the range of about 5-15 milliseconds.
As we will see later, the delays introduced from seek and rotation times
can be mitigated by ensuring more efficient data layout through Hierarchical
blocking. We will also see how the overall delay can be reduced by ensuring
better prefetching mechanisms. The main idea is to reduce the number of
calls to the disk, and since the transfer rate is usually much faster than disk
read, it is more efficient to read more data at each disk access. This would
allow maximum utilization of disk during each read. However, it is important
that only relevant data is prefected, otherwise there is a risk of introducing
wasteful latency without the data being used at the application level.
8

2.4 Reducing latency
From the discussion in previous section, two main techniques were identified
to optimize graph queries:
2.4.1 Caching at Crackle level
The word Crash will be used as short term to refer to Crackle cache. The
purpose of Crash is to store node information in low latency access memory.
Since a separate cache is maintained by the database, it is important to
ensure that the application cache or Crash maintains only relevant node
information. The size of Crash is set so that it can contain information of
atleast the number of nodes that are covered in domain of any given graph
query. The Crash consists of two components, namely the Node List and the
Edge List.
The Node List has a length equal to the maximum number of nodes in the
graph, whereas the lenght of the edge list is restricted to an upper limit. The
idea behind this scheme is that, given a large enough size of main memory
(above 2GB), it is always possible to maintain a pointer list of the size of
graph where each element corresponds to a node. The Node List consists
of a list of pointers which point to where the information related to node
is stored. This information may or may not be loaded into the Crash. If
information related to a node is not loaded then it has a null value in the
Node List.
The basic implementation consists of a Node List pointing to location in
the Edge List where neighbours for any given node are stored. Due to the
fixed length of the Edge List, it can maintain the edge information of only a
certain number of nodes. When there is an overflow, the nodes are ejected
from the list based on the FIFO scheme. The list is designed to be tightly
packed by storing node information back to back using an array structure.
This reduces latency arising out of random access patterns in main memory.
9

2.4.2 Efficient prefetching
By preloading relevant node information into the Crash layer, the results can
improve on two levels. Firstly, it will reduce the network latency with lower
calls to database instance. Additionally as a trickle down effect, this will
reduce the number of disk access.
The prefetching technique can be beneficially exploited based on the fact
that most of the graph query traversals depend on either on semantic or
topological locality. As such, it is beneficial to preload the neighbourhood of
a visited node in order to improve traversal speed.
Let us consider an example of a road network as shown in Figure 2.1. Typ-
ical query on such graph could be “Find local post office” or “Find local
restaurants that my friends like”. To process such queries, a set of neigh-
bouring nodes of a certain start node can be preloaded. The neighbourhood
can be confined within a certain block whose size can be determined based
on heuristics such as geographical bounds based on latitude and longitude,
or the physical distance from the central node. Such prefetching techniques
are domain dependent as they depend on the semantic knowledge of the un-
derlying graph. However, in this project a different type of mechanism is
explored namely Hierarchical Blocking which is domain independent.
Figure 2.1: Block prefetching on road network
10

2.5 Prefetching and semantic locality
Broadly speaking there are two ways to achieve data prefetching. The first
is software controlled where data is prefetched through an instruction set.
It is crucial to ensure that the additional overhead introduced by prefetch
instruction should not outweigh its gain. This can be achieved thorugh au-
tomated insertion of prefetching instructions into code to load relevant data
based on the program’s access pattern [28, 29]. It is worthwhile to note that
prefetching does not reduce the access latency, rather it overlaps it with the
computation thereby reducing the effective duration of a program.
The second way to achieve prefetching is through hardware-based schemes.
Whenever there is a cache miss for read instruction, its execution is stalled
till the required data is fetched from lower cache level. This problem can be
addressed by non-blocking cache [30, 31]. In this case, the processor proceeds
with subsequent instructions till it reaches the point where the previously
requested data is needed [32]. This gives extra head-room for cache to fetch
data concurrently. Another hardware technique is by implementing stream
buffer that buffers prefetched data seperately from cache [33] and helps in
reducing miss rate at the top leve of cache hierarchy.
Similar works to hierarchical blocking have been researched. For example,
the FAST algorithm [34] proposes an architecture sensitive layout scheme for
B-trees on disk-based database system.
This project will be use edge between nodes to derive the notion of semantic
locality which is independent of its domain. This semantic locality can be
further exploited for partitioning data into seperate components as proposed
in SPAR [15] where direct neighbours are co-located in same server. Another
example of data partitioning is the Cassandra which distributes data storage
across a cluster using multi-dimensional map [14]. Storage systems such as
Ficus [16], Farasite [17] and Coda [18] distribute multiple replicas of file
across the clients.
However, these systems can be leveraged by using sematic knowledge to group
11

related data locally which would in turn reduce the processing overheard of
accessing multiple servers. It is crucial to understand the topology of graph
and how it affects different graph queries. The semantic knowledge can be
used in online social networks such as Twitter, Facebook and Google+ to
improve the system efficiecy [20] . The locality principle can be exploited
to improve storage efficiency and processing speed in distributed storage
systems.
12

Chapter 3
Hierarchical Blocking
A typical modern computer system contains various levels of cache to store
data to form a memory hierarchy as shown in Figure 3.1. At top region of
the hierarchy are CPU registers and caches such as L1 & L2 whereas at the
bottom of the list are non-volatile memory storages such as hard disks. As
we move up the hierarchy, the memory gets closer to processor and hence
becomes faster. However, the size of cache decreases with increasing level.
This results in a trade-off between miss-rate and latency. The high level
caches have lower latency compared to those at lower level but due to size
limitation, there is a higher miss-rate. In case of a miss, the data has to be
fetched from subsequent cache below the current level.
Data at each level is arranged in form of blocks of fixed length. When any
specific data is fetched by a higher cache, the whole block containing the
requested data is loaded. If there is no space left in the higher cache then
one of its existing block is evicted.
Generally, a CPU cache is made up of blocks of length 64 bytes known as
cache lines. If the processor requests for certain data and there is a miss
from the CPU cache, the data is then fetched from the main memory. The
Translation Lookaside Buffer (TLB) is then accessed to load data from the
main memory. The TLBs have lower latency compared to main memory and
13

contain mapping of logical to physical address for 4KB blocks in the main
memory.
Registers <1 cycle
Internal cache 1 cycle
Secondary cache
5 cycles
Tertiary cache 10 cycles
Physical memory 25-50 cycles
Swap disks and file system disks ~1,000,000 cycles
Figure 3.1: Memory hierarchy of a typical computer system with associatedaccess cycles for each level
The number of cache misses can be reduced by ensuring efficient spatial
locality within each data block such that neighbouring cells in a block contain
data of higher relevance.
The van Emde Boas (VEB) tree [27] was introduced as a data layout struc-
ture for trees. It arranges the nodes of a tree to increase spatial locality
independent of how the cache hierarchy is organized in a machine. The al-
gorithm for VEB takes a tree as input and outputs contiguous blocks data
where each block consists of a subtree nodes arranged in Breadth First Search
(BFS) order.
For illustration, consider a binary tree is used for VEB layout as shown in
Figure 3.2. The tree is then split at a depth of D/2 where D is maximum
depth of the tree from its original root. The subtree obtained during the
split is traversed in BFS order and forms the first block. The remaining
part of tree now consists of new roots O(2D/2) , each of which are then
14

recursively traversed as separate subtree and then output as separate blocks
of contiguous memory layout.
Figure 3.2: van Emde Boas layout scheme
Inspired from this layout scheme, the Hierarchical Blocking Algorithm (HBA)
was introduced. Contrary to the VEB algorithm where a splitting point is
determined during its execution based on the diameter of a given graph,
in case of HBA, we make assumption that information regarding memory
hierarchy of a given machine is supplied to the algorithm as input. With
the help of this information, the splitting point is determined by comparing
the space taken by in-memory representation of vertices traversed with the
required size to fit into block size of cache. This split off can be implemented
for multiple levels of cache as follows:
1. CPU caches including L1, L2 and L3 which have block size of 64 bytes
2. Main memory (DRAM) with block size of 1024 bytes
3. The TLB caching for address translation of pages of size 4096 bytes
4. The TLB caching for superpage translations where pages are clustered
into a superpage of size 2097152 bytes
The HBA blocking works with a slight variation to the VEB algorithm. It
takes an arbitrary directed or undirected graph and generates a data layout
15

in form of contiguous blocks each of which represent a separate sub-graph.
It consists of series of repeated breadth first searches at the end of which the
leaves are used as roots for new searches.
Let A(x) denote application of an algorithm A on one or more vertex of a
graph denoted by x. If the algorithm is applied on a list of vertices then the
output of every individual vertex is concatenated in the order in which the
vertices are passed as inputs. Let Ak denote k recursive application of an
algorithm on input such that the output of one recursion is used as input
of the next. Let |v| represent the amount of space taken by a vertex v and
similarly |A(x)| represent the size taken by the set of vertex generated as
output by algorithm A with x as input.
Let BFSd(x) denote application of breadth first search with vertex x as root
and d as the maximum depth to be traversed. The HBA can be denoted
as BFSd as it is essentially repeated BFS with fixed upper bound based on
memory hierarchy. The HBA loads all the nodes that it traverses into a spa-
tially contiguous layout. This layout is divided into blocks of size depending
on units of each memory hierarchy levels passed as input to algorithm.
Consider a memory hierarchy of n levels with monotonically increasing units
of spatial locality denoted as si for level i, such that si < si+1.
Now we can define the HBA as follows:
• P1(0) = BFSd(0) where the depth is derived such that:
– If |BFSd(0)| > s1, then d = 0
– Else d is derived such that |BFSd−1(0)| < s1 and |BFSd(0)| ≥ s1
• P1(0) = P ki−1(0) where k is derived such that:
– If |Pi−1(0)| > si, then k = 1
– Else k is derived such that |P k−1i−1 (0)| < si and |P k
i−1(0)| ≥ si
The HBA starts from a certain root node r and recursively applies Pn on r
where n is number of levels in memory hierarchy. As the algorithm traverses
16

the tree, it generates memory sensitive layout of the nodes it traverses. It
is important to note that the algorithm allows the size of output block to
exceed its upper limit of memory unit. This is due to the fact that evaluation
of block size takes place only at the beginning of new level in tree, as such
the output block size could possibly exceed the memory unit limit (passed
as input to algorithm) while at the middle of traversing a tree level.
The algorithm was originally inspired by working with tree data structures
as input. But it can be slightly modified in order to work with graph data
as well. It is important to keep into consideration that in graphs a child
node can have incoming edges from more than one parent nodes. As such,
the algorithm needs to ensure that a child node is visited exactly once in
order to avoid recursive loop and redundancy. The initial values passed
before blocking are shown under Algorithm 1 and the modified Hierarchical
blocking is shown under Algorithm 2.
Algorithm 1 Initial variables
Input: root as start nodeInput: N as total number of memory levelsInput: S[1 .. N] containing block size of each memory levelInitialize: S[N+1]←∞Initialize: roots← new array of N+1 empty queuesInitialize: leaves← new array of N+1 empty queuesInitialize: space← new array of N+1 elements initialized to zeroInitialize: level← N + 1
The algorithm uses queue structure to store roots and leaves at each levels of
the hierarchy. The array space contains the amount of space that the nodes
at any given level are taking. As such, the space taken by a particular level x
at any given point of time is given by space[x]. This value is then compared
with the limit set by the array S passed as input containing upper bound
for all levels. When the upper bound is reached, the algorithm starts a fresh
block by taking the leaves of previous block as roots for new blocks.
The steps 31-33 of Algorithm 2 implement BFSd. First the node is checked
for presence in the layout in order to prevent duplication. Note that the
17

Algorithm 2 Hierarchical Blocking Algorithm
1: roots[N+1].push(root)2: loop3: if roots[level] = empty then4: roots[level]← leaves[level]5: leaves[level]← empty6: end if7: if space[level] ≥ S[level] then8: leaves[level + 1].push(roots[level]) . Promoted to higher level9: roots[level]← ∅
10: space[level + 1]← space[level + 1] + space[level]11: level← level + 112: CONTINUE loop13: end if14: if roots[level] = ∅ then15:
16: if level = N + 1 then17: EXIT loop18: else19: space[level + 1]← space[level + 1] + space[level]20: level← level + 121: end if22: else23: node← roots[level].pop()24:
25: if level > 1 then26: roots[level − 1].push(node)27: space[level − 1]← 028: level← level − 129: else30: if node /∈ output then31: output.append(node) . Node copied to H-blocked layout32: space[1]← space[1] + sizeof(node)33: leaves[1].append(node.childNodes())34: end if35: end if36: end if37: end loop
18

step 30 ensures that a node is checked before being copied to output layout.
This can be achieved in a more efficient manner such as by implementing
a set containing the node number for all loaded nodes. The layout output
needs to be stored in contiguous data structure that provide physical locality
such as an array or buffer. The child nodes at the end of BFS are added to
leaves[1]. If the amount of space used by nodes at level 1 is less than the
unit of spatial locality for hierarchy level 1, then all the leaves of the BFS are
moved to roots[1]. The algorithm then performs new BFS on each of these
separately as new roots to uncover their child nodes. As such, only when the
total space occupied by nodes at the lowest level is equal to or greater than
the unit of spatial locality at the lowest level, the level variable is bumped
and the leaves it generated are moved to the next higher level of 2.
As such, the splitting point is determined dynamically during the algorithm
execution and so is the depth d for operation BFSd fixed based on same
principle.
For any level greater than one, the remaining steps apply which implement
Pi, where Pi is input of list of nodes stored in root[i]. Steps 7-12 of Algorithm
2 checks whether or not the space taken by block for level i due to repeated
application of Pi−1 has exceeded the unit of spatial locality based on s[i].
If it has exceeded the limit, then the output leaves are passed to the next
higher level i + 1. Otherwise, the operation Pi−1 is repeatedly called on the
head nodes of the roots[i] list. The final level of n+ 1 is designed as simply
a placeholder for the final output of Pn and is initialized with infinite size
limit.
Let us consider a simple example with an input graph and memory hierarchy
as shown in Figure 3.3. The memory hierarchy consists of two levels. The
first level corresponds to the Dynamic Random Access Memory with block
size of 1 KB. The second level corresponds to the Translation Lookaside
Buffer cache with block size of 4 KB.
The HBA would begin from the node a as root which will be added into
roots[n + 1]. The node passes through numerous iterations and finally gets
19

B1
a
b c
B2
d
g h
B
DRAM 1 KB
TLB cache 4 KB B3
e
i j
B4
f
k l
Figure 3.3: Undirected graph and memory hierarchy inputs
passed to roots[1] where it gets copied into ouput block B1. The child nodes b
and c are then added into leaves[1]. As roots[1] is empty, they are transferred
to this queue. Lets assume the case where S[1] < space[1] which means that
the size of B1 so far is within the size of DRAM block. In such case, the
HBA will continue at same level and add nodes b and c into B1. After
this the nodes d, e and f will be added into roots[1]. Now lets assume the
case where S[1] ≥ space[1]. The nodes d, e and f are then promoted to
level 2 and P2 is applied on them individually to give outputs blocks B2,
B3 and B4 respectively. At the end, the child nodes of nodes g, h, i, j, k,
and l will be added into roots[1]. Assuming that S[1] ≥ space[1] for blocks
B2, B3 and B4, these nodes will be promoted to level 2. However, now the
S[2] ≥ space[2] which means that the size of the larger enclosing block B
has surpassed the size of TLB cache block. As such the nodes in roots[1] are
further promoted to level 3 and P3 blocking is applied on them individually.
The layout output is shown in Figure 3.4.
B1 B2 B3 B4 . . . . . . . . . . .
1 KB
4 KB
Figure 3.4: Output in contiguous layout
20

3.1 Hot cache analysis of blocking effect
In order to understand how performance is affected by the H-blocking scheme,
preliminary tests were conducted. In these tests, an original graph generated
from the Stanford Network Analysis Package (SNAP) generator was loaded
into memory and stored in a contiguous array using Java’s ByteBuffer con-
struct. The nodes were stored in the increasing order based on their node
number. The in-memory representation of the graph was then modified to
following three different layouts:
1. Irregular
2. H-Block
3. BFS
In the irregular layout, data was scrambled in order to ensure that there
is no inherent locality between parent and child nodes. This mimics real
world scenario where graph nodes are dynamically modified thereby lowering
the locality of nodes based on their node number. The second layout was
generated by applying the H-blocking procedure which is designed to improve
spatial locality of parent and child nodes in array by improving their locality
based on node number. The last layout used for comparison was from BFS
scheme. Here the graph was traversed in Breadth First Search (BFS) manner
and the node numbers were rearranged based on the traversal order.
Although H-blocking is essentially repeated application of BFS, there is a key
difference from regular BFS. The H-blocking procedure applies BFS only to
a certain depth until a splitting point is reached. After that it continues
series of fresh BFS on leave nodes of previous search. As such, it is not
fully optimized to BFS query. It has an element of both parent-child as well
as inter-sibling locality, with the main objective to create blocks compatible
with the memory hierarchy of system. The BFS results on each of the three
in-memory layouts are as shown in Table 3.1.
21

H-block Irregular BFS
Query duration (sec) 17.57 34.28 15.82Average nodes visited 10M 10M 10M
Table 3.1: Hot cache BFS performance with different layouts
The test was applied on a random graph of size 10 million nodes. The BFS
query covered the complete graph. As expected, the BFS layout gave highest
performance followed by H-block. It took about 17.57 sec which is almost 2x
increase compared to the irregular layout at 34.28 sec. The BFS layout gave
slight better performance compared to H-block of about 10% which is due
to the fact that BFS layout is ideal for the BFS query. The main cause of
disparity between the H-block and BFS layouts can be explained based on
the “Distance Effect” which is discussed in detail under section 6.4.3. The
idea is that as we move down the graph, the number of nodes at any given
BFS level gets larger. This increases the spatial distance between sibling
nodes in the H-block layout. In contrast, the BFS layout does not suffer
from this effect as it stores the nodes for every level linearly in the order of
BFS traversal. Due to this, the number of blocks that need to be fetched
from DRAM into CPU cache is higher in case of H-block comapred to BFS
layout which affects its relative performance. However, it is worthwhile to
note that the H-block is expected to give better generalization over range of
other queries such as Depth First Search (DFS) and Single Source Shortest
Path (SSSP).
22

Chapter 4
System Overview
The experiments were carried out using Crackle which is built on the JVM
environment. Crackle consists of four layers as shown in Figure 4.1. The
individual layers are as follows:
1. Query processing: This layer has implementation of graph queries such
as BFS, DFS and SSSP. It is closely coupled with the caching layer and
calls it whenever any node information is needed.
2. Caching: This layer implements an array that contains node informa-
tion. Alongside, it maintains a list of all the nodes that have been
loaded. When the query processing layer requests for a node, it is
first checked within local cache. If there is a miss, then this request is
forwarded to the prefetching layer which loads data from the database.
3. Data loading: This layer implements SQL calls to database. The re-
quired data may already be present in the database cache or else it
needs to be loaded from disk. This also accomplishes prefetching which
is done implicitly in case of H-block layout.
4. Database: This refers to data source used to store and query graphs.
There were two databases used in my experiments. The first one was
PostgreSQL which is based on relational model. The second data source
used was Neo4j which is graph database and uses key-value stores.
23

Database
Data loader
Cache
Java query
Figure 4.1: Layers of Crackle
PostgreSQL was used for evaluation as it a standard open source database
available based on the SQL standard. It also supports wide range of data
types and SQL queries. The Neo4j was used as the other database for testing
as it is a popular NoSQL graph database and runs on the JVM.
4.1 Caching
We had discussed earlier that every call made to the PostgreSQL introduces
latency. As such, it becomes more beneficial to maintain a separate cache at
the application level as subset of the PostgreSQL cache. The aim here is to
reduce the calls made to database instance by increasing data availability at
application level.
The cache is designed based on the basic idea that it is always possible to
load the node-list into memory but not to load the complete edge-list. This
is due to the fact that the number of nodes is lower compared to the number
of edges in a connected graph. The node-list is implemented as an array and
each cell is mapped to a node based on its node number also referred as node
ID.
The second data structure used is ByteBuffer which stores node information
of all the loaded nodes. It has an upper limit as only a fraction of node from
graph can be loaded at any given time. It stores information for each node in
24

form of blocks. Each block begins with node ID to which it belongs followed
by ID of its child nodes. The blocks end is marked by a delimiter -1. Each
unit within a block has size of 8 bytes and the total block size depends on
degree of node.
A write pointer is maintained which keeps track of where the last write
was done. Whenever a new node is loaded into cache, the write pointer is
incremented to the end of the newly loaded block. When the pointer reaches
end of ByteBuffer, it restarts from the top removing the oldest block in FIFO
manner. The node list contains pointer to the location where a node is loaded
in ByteBuffer. If a node is not loaded then the cell takes the value of -1.
Figure 4.2: Example of cache implementation
In Figure 4.2, the nodes 1 and 2 are loaded at position 0 and 3 respectively.
On the other hand nodes 3 and K are not loaded and have value of -1 in the
node list.
It is worth noting, that the ByteBuffer implementation can easily be extended
to add any additional information of node. For example, edge weights can
be introduced after every child node as shown in Figure 4.3.
As such, the cache has been designed to ensure contiguous allocation of mem-
ory such that there is single pointer for each node pointing to its dedicated
block. By using primitive data structures, it is possible to precisely predict
and minimize the amount of space the cache takes. It is given by following
25

Figure 4.3: Extension of cache to include edge weight information
equation:
Cache size = (Graph size ∗ 8) + Maximum number of nodes to load ∗node size ∗ 8
In the above equation the size of node depends on its degree. For a simple
implementation that does not take into account the edge weights, it is given
by node size = degree + 2. Here, the degree is added with 2 which
corresponds to the start and end limiters present for each node. The node
size can be adjusted to accomodate greater information for each node.
Different graphs can have different degree distribution. For example, scale
free networks follow power law distribution with presence of nodes with very
high degree. In such cases the average degree does not give good heuristic
of how much space a node could assume. As a good design principle, it is
important to ensure that the ByteBuffer implementation can work even in
worst case scenario i.e.- can load node with highest degree. Since any given
graph can have a node with degree as high as (N−1) where N is total number
of nodes, the ByteBuffer must have size of atleast (N − 1 + limiterSTART +
limiterEND) ∗ 8 bytes so that it can load the largest node present in graph
at any given time.
26

Chapter 5
Data Preperation
The graphs used for the experiments were generated using the SNAP. The
generated graphs were of three different types as follows:
1. Small world (WS) graph with 10M nodes and 60M directed edges based
on the Watts Strogatz model
2. Random (ER) connectivity graph with 10M nodes and 60M directed
edges based on the Erdos Rnyi model
3. Scale free (SF) network graph with 10M nodes and 30M directed edges
based on the Barabasi Albert model
In the Watts Strogatz model, all the nodes are first arranged in a regular
lattice. A fraction of edges are chosen and their endpoints are repositioned
based on rewiring probability. Some of the other parameters taken into ac-
count are the diameter which is typically fixed to around 6 hops and Poisson
distribution of degree with each node having greater than three local neigh-
bours. Typically it consists of a single giant component due to high degree
of clustering.
The Erdos Rnyi model has two variants. In the first case G(n, e), a graph is
uniformly chosen at random from all the possible graphs with n nodes and e
edges. In the second variant G(n, p), two nodes are randomly connected with
27

probability p, which is independent of other edges. In this case the average
degree is given by K ∼ n ∗ p.
The Barabasi Albert model uses preferential attachment mechanism to gen-
erate a scale free network graph. The algorithm begins with a certain number
of nodes, each having at least one neighbour. As new nodes are added, they
are connected to the existing ones where the probability of a new edge to a
node is directly proportional to its degree. As such, certain nodes end up
with very high degree as hubs. Power law gives the distribution of degree as
P (k) ∼ c ∗ k−γ, where c is a normalization constant and is power law degree
exponent usually in the range of 2 < γ < 3.
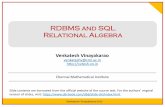
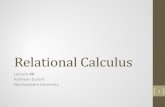
The underlying structure of each graph is shown in Figure 5.1 and their
corresponding degree distribution is displayed in Figure 5.2.
Figure 5.1: Topology of Random, Small world and Scale free graphs (left toright order)
5.1 Graph pre-processing
Each graph was pre-processed to generate its two versions. The first version
was generated by applying H-blocking algorithm which gives a memory effi-
cient H-block layout. The second version was generated by randomizing the
graph through shuffling of the node ID as key.
28

0
200
400
600
800
1000
1 10 100 1000
Num
ber of nodes
Degree
Random Small world Scale-‐free
Figure 5.2: Degree distribution
5.1.1 H-blocking
The generated graph consists of an edge list containing the node IDs of source
and destination. The graph initially has locality depending on model used
by the generator as described in the previous section.
The graph is then passed to an H-blocking application implemented in Java.
The application traverses input graph in a series of repeated breadth first
search as described in the earlier section on H-blocking. The memory hierar-
chy information is also passed as input. Maintaining focus on improving the
efficiency between the disk and main memory, the blocking was implemented
only at one level for VM pages of size 4KB. A low degree node was chosen
as start node to minimize offset in layout. This ensures that there is lower
overshoot of block sizes. On the other hand, nodes with high degree are
more likely to overshoot the upper limit of block size set by spatial units of
memory.
During the execution of blocking application, the space taken by a node with
n number of child nodes is calculated as n ∗ 2 ∗ 8. Where 8 bytes is the size
taken by a node number (represented as an integer), multiplied by 2 for each
source and destination node in an edge list. Each node is visited only once
29

by the blocking algorithm.
The blocking application traverses the graph and generates a mapping vector
as output that maps original node number to its new blocked number. The
whole idea is to layout the edge list contiguously based on the new node key
scheme which would give more efficient blocking sensitive to spatial units of
memory. The mapping vector is applied to the original graph to generate
more efficient H-blocked version of the graph. This was achieved through
following steps:
1. Import the mapping vector to database. It would be stored as a table
with two columns each corresponding to old and new node ID
2. The new H-blocked graph is then generated through two inner joins as
follows:
(a) Inner join between the mapping vector and original graph so that
the ID of source node is mapped to its equivalent new ID:
CREATE TABLE tmpAS (SELECTm.IDNEW AS nFROM , d.nTO
AS nTO FROM map AS m INNER JOIN graph AS d ON d.nFROM
= m.IDOLD);
Here, here map refers to the H-block layout mapping vector, tmp
is intermediate table created, graph refers to original graph table,
nFROM refers to source node, nTO refers destination node.
(b) Similarly, an additional join is performed to get final H-blocked
graph:
CREATE TABLE graphHB AS (SELECT d.nFROM AS nFROM ,
m.IDNEW AS nTO FROM map AS m INNER JOIN tmp AS d
ON d.nTO = m.IDOLD);
Here graphHB refers to the newly H-blocked graph.
30

3. When graphHB is generated, its rows are not stored in any particular
order. In order to organize it in right format, the nFROM and nTO
columns are indexed.
4. The graphHB is then reorganized by taking the index on nFROM as
key. This is achieved by the CLUSTER function in PostgreSQL:
CLUSTER index nFROM ON graphHB;
Here index nFROM is index on the nFROM column of graphHB.
The clustering ensures that the edge list is physically stored based on the
order of node ID. As such, nodes with closer ID share greater spatial locality.
5.1.2 Randomization
Earlier we noted that the graphs output by generator are basically derived
from a lattice form. As such, the nodes have some inherent locality so that
nodes with closer ID are likely to have greater preferential bonding between
them. In order to have clear benchmark it is important to make sure that
the graph used for comparison does not have any particular inherent locality.
In order to achieve this, the graphs need to be modified to generate its
new randomized copy. This process is similar to how the H-blocked copy is
generated.
1. A scrambling vector is generated that contains mapping of original
node id to a new random ID. The vector is checked not to contain any
collision.
2. The randomization is achieved in form of two inner joins as follows:
(a) Inner join between graph and scrambling vector m:
CREATE tmp AS (SELECT m.IDOLD AS nFROM , d.nTO AS nTO
FROM map AS m INNER JOIN graph AS d ON m.IDOLD =
31

d.nFROM);
Here map refers to the shuffling map vector.
(b) Inner join between intermediate table (tmp) and scrambling vec-
tor:
CREATE graphR AS (SELECT d.nFROM AS nFROM , m.IDNEW
AS nTO FROMmapASm INNER JOIN tmpAS dONm.IDOLD =
tmp.nTO);
Here graphR is a newly generated random version of the original
graph.
3. The two columns of graphR are indexed and clustered to rearrange the
data entries based on increasing order of node ID:
CLUSTER index nFROM ON graphR;
Here index nFROM is index on the nFROM column of graphR.
At the end of pre-processing, each graph generates two versions: H-blocked
and irregular (randomized). This step is applied to all the three different
types of graph used in experiments. The two versions provide a basis for
comparison in the evaluation section.
Since the layout is implemented at the disk level, every time the database
needs to load any particular node, the whole block containing the node is
loaded into memory. This block contains the requested node’s neighbour-
hood. In this way H-blocking achieves implicit prefetching. It saves the cost
which would otherwise occur in case of prefetching techniques that make use
of explicit calls. Other major benefit that the H-blocking provides is that it
improves the spatial locality of neighbouring nodes. This compaction takes
into consideration all the levels of memory hierarchy leading to most efficient
utilization of space at every memory level.
32

Chapter 6
Evaluation
The experiments were conducted in two batches. The first batch of tests
was carried out in order to analyse the performance of every graph with test
queries using Crackle. The second batch of tests were conducted on the best
performing graph from the previous batch in order to gain an in-depth anal-
ysis of individual test queries by tracking the block faults at different cache
levels of the PostgreSQL Buffer and Kernel file system cache. The aim of the
first batch is to build an overall understanding of how H-blocking influences
test query performance on different graphs. The second batch tests were
conducted to build from the first batch and narrow down the analysis by
observing the influence of H-blocking by tracking cache utilization. The final
part of the second batch includes comparison tests between H-blocked rela-
tional database and Neo4j. The configurations of machine used for evaluation
are as shown in Table 6.1.
6.1 Batch 1
The runs for each query were conducted with ten iterations. The idea was to
have each test covers at least 10k nodes with varying centrality and to run
them with different starting points. Only exception is WS with BFS where
33

System memory 16 GiBCPU clock speed 2.5 GHzL1 cache 256 KiBL2 cache 1 MiBL3 cache 6 MiBStorage 465 GiBSATA controller 66 MHzProcessor architecture 64 bits
Table 6.1: Machine configuration
the number of nodes covered is small, however, further tests were carried out
with much larger coverage of about 10M nodes in the second batch tests.
The performance of every individual run was averaged to get the overall
performance for each test query. The aim of this batch is to evaluate the
output results for individual graphs independent of each other. As such, the
search space for each graph need not be equal.
6.1.1 Breadth First Search
In the first set of experiments, the BFS query was tested on different graphs.
For each graph, the performance was compared between its H-blocked and
irregular layouts. The results of cold-cache BFS query for different layouts
are shown in Table 6.2.
WS SF ER
Central Edge Low Medium High RandomIrregular (sec) 4.12 2.11 73.37 25.25 146.79 56.29H-Block (sec) 3.51 1.08 60.42 19.91 126.87 41.71Query size (nodes) 4K 0.9K 76K 50M 64M 10KGain (%) 14.65 48.82 17.66 21.13 13.57 25.9
Table 6.2: BFS test query results
34

Small World
The BFS was tested on different types of start node. In case of the small
world graph, tests were run separately on nodes with high and low centrality.
This enables us to understand the impact of performance based on centrality
of start node of traversal. As can be seen in the results, the performance
improved by about 14.65% with HBA in case of more central start nodes.
On the other hand, the start nodes that have lower connectivity (at outer
bounds of clique-like cluster) showed improvement by about 48.82% which
is above 2x gain in some cases. The difference between the central and
edge node performance can be explained based on the total number of nodes
visited. In case of edge nodes, the BFS tree level grows by rate of around 3
degree whereas in case of central nodes it grows with around 5 degree. This
fact is also evident by the total number of nodes visited in the former case
as high as 9k compared to latter at 40k. As such, the performance between
them would converge with larger query to baseline improvement of about
14.65% as we will see in the second batch tests.
Scale Free
In the case of graph with scale free characteristic, the start nodes were divided
based on their overall degree: Low (< 6), Medium (> 1000 and < 10K) and
High (>10K). The nodes were chosen with random distribution in order to
maximize separation between the nodes. The performance improvement of
medium and low start nodes were 21.13% and 17.66% respectively. The gain
of high degree node was 13.57%. While the tests on low degree covered about
7.6k nodes per query on average, the other start nodes covered well above
the half of all nodes in graph. As such, while the low node results can slightly
vary, the result of other two are fairly stable given the large fraction of graph
it traverses. It is worthwhile to note that the percentage wise performance
gap between high and medium node of approximately 7.5% is due to the
fact that unlike medium node, in case of high degree node, the BFS was
restricted to maximum of two hops. This is a reasonable assumption since
35

the high degree node had high centrality and covered almost 64% of the
graph.
Random
The final tests were conducted on random graph which have relatively low
degree distribution compared to other two graphs. As there is no particular
underlying structure and each nodes connectivity is derived randomly based
on probability, the start nodes were also chosen randomly. The tests covered
a total of 10K nodes with HB layout showing speedup by around 25.9%.
It is interesting to note that the performance gain is high in this case and
comparable to that of WS. This can largely be explained due to the fact that
the graph inherently lacks any form of spatial locality based of nodes and as
such HB layout is expected to improve the performance.
6.1.2 Depth First Search
The second set of experiments was carried with DFS query. Similar to BFS
experiments, the performance was benchmarked against irregular version of
graphs as shown in Table 6.3.
WS SF ER
Central Edge Low Medium High RandomIrregular (sec) 40.6 42.43 35.37 33.47 35.46 50.08H-Block (sec) 5.21 5.06 27.79 28.22 28.38 21.05Query size (nodes) 10K 10K 10K 10K 10K 10KGain (%) 87.1 (∼8x) 88 (∼8x) 21.4 15.68 19.98 57.96 (∼2x)
Table 6.3: DFS test query results
36

Small World
The tests that were carried out on small world graph covered about 10k
nodes. Keeping in line with BFS benchmark, the start nodes were classified
as central and edge nodes. The tests were then carried out separately for
each case. The results in both cases showed performance gain in the region
of 87-88%. This almost 8x improvement over the standard case, shows the
great efficiency HBA can introduce in queries that have vertically oriented
traversal such as DFS. Another example is of A* where the query is designed
to traverse as deep as possible to a sufficient level before it branches out
for more horizontal search. It is also interesting to note that there is little
influence of how degree affects the final performance. Again, this is due to
vertical traversal of DFS where the number of child nodes at any particular
level has little effect compared to number of maximum hops for any given
start node. This was restricted to 1K in our experiments.
Scale Free
The second tests were carried with scale free graph with start node classifi-
cations: low, medium and high. The performance gain is consistent for low
and high nodes in the range of approximately 20-21%. The observation for
medium node showed relatively lower speedup by approximately 5%. This
can partially be explained due to the fact each query visits about 1k unique
nodes with no predefined path. A path that traverses over a large node
means that larger blocks need to be loaded to memory. This lag is sufficient
to slightly vary performance that in this case came to be around 2 seconds
between medium and high nodes. This lag becomes noticeable when a large
node appears somewhere at the tail of a DFS search as they are first to be
revisited compared to nodes visited at beginning of path. This is unlikely
to occur when the start node itself is of high degree. Clearly, the difference
based on start node would converge with increase in the coverage of query.
This is due to the fact that large queries would have fair share in visiting
large nodes.
37

In order to take a deeper look, a new set of tests were implemented which
covered large fraction of nodes which constitutes about 10% of the graph.
The nodes were chosen with random distribution of degree. The results
showed similar trend with about 20.65% gain. Furthermore, there was a
decrease in the number of page miss at PostgreSQL cache level. This was
reflected by decrease in number of tuple fetch from disk to about 1.4M for
H-block graph compared to around 6.6M fetches in case of irregular graph.
This corresponds to 5177 fewer fetched per query on average with H-block
graph.
Random
The last tests where carried with Random graph where the start nodes were
chosen with random distribution. The DFS search showed an improvement
by about 57.96% that is gain of 2x moving from irregular to H-blocked format.
As there is no community structure in this graph, the edge connectivity
between nodes is scattered which in turn makes a vertical search inefficient
with the non-optimized graph layout.
6.1.3 Single Source Shortest Path
The third set of tests was carried out with Dijkstra Algorithm to find shortest
path between a pair of nodes. The pairs of connected nodes were randomly
selected to run SSSP query and in overall around 100k nodes were covered
by the tests. The test results are shown in Table 6.4
WS SF ER
Irregular (sec) 99.37 174.88 175.76H-Block (sec) 25.10 174.46 172.34Query size (nodes) 100K 100K 100KGain (%) 74.75 (∼4x) 0.24 1.95
Table 6.4: SSSP test query results
38

In small world graph, the HBA showed improvement by 74.75% which is
almost 4x speedup case. On the other hand, the performance gain on random
graph is 1.95%. The scale free network showed minute gain of 0.24%.
One way to explain the disparity in performance is based on the structural
properties of the graphs. The small world consists of small clusters of nodes
that have greater internal clustering that give rise to clique-like structures.
Such clusters are interconnected through bridges (weak links) between edge
nodes while maintaining the law of maximum separation of around 6 hops.
In order to execute SSSP between nodes that belong within a same cluster,
the query needs to perform Dijkstra algorithm only for member nodes of
that cluster assuming non-negative weight. On the other hand, the random
graph does not consist of such structure. Due to this, in order to run SSSP
between any two random nodes, the shortest path needs to be calculated
for a large indefinite number of nodes till the radius of search becomes large
enough to reach the destination node. As such, it is relatively slower to run
the query on this type of graph. On the other hand, the scale free network
follows power distribution of degree. Due to this, running an SSSP query
over a very large node results in a greater number of edges being traversed
to derive shortest path between any given node pair. This results in relative
slowdown in its performance.
Another reason of slow performance with SF and ER can be attributed to
the nature of query itself. At each step when a node is visited, the query
loads an H-block into memory that consists of the neighbourhood of visited
node. However, the next node to be visited may not necessarily be from
that block, as the traversal is guided by a priority queue and the algorithm
picks a node that has lowest distance (greedy approach). As such, a newly
loaded block would be discarded at new step only to be reloaded at later
stage when any node from that block is needed. This problem is more acute
in case of scale free and random networks where the size of clusters is large.
It takes a large number H-blocks to form such large neighbourhood and as
only a limited number of H-blocks can be loaded at any given time, only a
fraction of neighbourhood is in-memory. This results in greater number of
39

re-fetching of H-blocks. This renders the purpose of H-block useless, which
is to minimize number of fetches.
6.2 Batch 2
In the previous batch of experiments the performance on the small world
graph showed consistently good performance compared to other graphs.
Whereas other graphs were traversed to a significantly large number of nodes
(above 1M), the tests on small world graph were largely restricted to a max-
imum of 40k in case of BFS. In order to further examine the performance,
a new batch of tests was carried out with small world graph that covered
about 7.5% (above 700K nodes).
PostgreSQL buffer and kernel cache
In a regular query, the database first checks the PostgreSQL buffer which
is its internal cache. It scans through every row in a relation due to which
the cost of a query directly depends on the number of tuples present in a
relation[35]. However, the tests were based on indexed source and destination
nodes. As such, every query would make an index scan through data pages
instead of individual tuples. The optimizer then scan thourgh the large
data pages to fetch data tuple. In this batch tests two caching statistics are
analysed: PostgresSQL buffer and kernel cache. Whenever there is a miss at
PostgreSQL, the database then invokes a call to kernel cache. The reason is
because the PostgreSQL buffer is a subset of the kernel cache due to which
data absent in the former might still reside in the latter. It is only when a
miss occurs at the kernel’s I/O cache, a physical read is required from hard
disk. As such, by observing the fetch rates at these two caching layers, it
is possible to determine their effectiveness. A lower number of fetch rates
would correspond to greater effectiveness as then a cache is able to satisfy
large number of requests without redirecting the call to a lower caching layer
40

or storage.
6.2.1 Breadth First Search
The first tests were carried out using BFS. The overall performance of H-
block was close to 16.11 seconds whereas irregular was at 18.17 seconds cor-
responding to a performance gain of 11.34
In the previous batch, it was observed that the edge nodes gave significantly
higher gain compared to the central nodes. We had stated that this would
converge to its lower range when the search space is increased to cover sig-
nificant portion of graph and the above results convey that trend.
The performance of the search was evaluated by observing the fetch patterns
at different levels such as PostgreSQL buffer cache and kernel cache as show
in Table 6.5.
PostgreSQL cache (8KB blocks) Kernel cache (4KB blocks)
H-block 1643 219Irregular 2220 798
Table 6.5: Fetches per query for BFS
The number of PostgreSQL fetch is equivalent to misses that occur at this
level. The H-blocked showed gain of by about 26%. This translates to
decrease in kernel calls and leads to lower latency of inter-process communi-
cation, even though it is not significant in comparison to disk access latency.
The kernel cache was calculated by tracking the number of live objects cor-
responding to relations and index used during scan. Table 6.5 shows the
number of 4KB blocks that were read directly from disk to the kernel cache.
The overall number of blocks fetched for H-block graph is reduced by about
72.56%. This translates to decrease in the overall number of blocks fetched
per query by 579 which reduces latency due to disk access.
41

6.2.2 Depth First Search
The second tests were carried using DFS. The search was implemented with
root nodes with random distribution of degree. The tests covered above 10%
of the graph which is slightly above a million nodes.
In the first batch tests, the small world showed marginal improvement by
as much as 87.1%. It becomes interesting to check how it performs with
more searches that cover nodes of varying centrality. The H-block duration
was found to be at 0.95 seconds whereas that of irregular was 1.93 seconds,
showing a gain of about 50.78% (∼ 2x).
The results show same trend with that of first batch with well above 2x gain.
In order to take a close look at the difference between H-block and irregular,
Figure 6.1 was plotted which shows the relative distribution of query based
on its duration.
!"#$!"#%!"#&!"#'!"#(!"#)!"#*!"#+!"#,!"#
$!!"#
$# &# (# *# ,# $$# $&# $(# $*# $,# %$# %&# %(# %*# %,#
!"#
$%&'()*$(+",
-.&/0
1&
2"$3,-.&/)#41&
-./012345# 6774890:7#
Figure 6.1: Relative distribution of H-block and irregular graph queries basedon their duration
One observes that a significant portion (70%-80%) of queries at lower range
of 1-3 seconds correspond to H-block with majority within range of 1-6 sec.
On the other hand, irregular query appear at long duration range with several
of them well above 10 sec.
42

Further tests were carried out to take a closer look at block fetch patterns at
the PostgreSQL and kernel caching layers. The results are shown in Table
6.6.
PostgreSQL cache (8KB blocks) Kernel cache (4KB blocks)
H-block 2942 300Irregular 6087 2507
Table 6.6: Fetches per query for DFS
The PostgreSQL cache showed reduction in fetches by about 51.7% (2x). This
corresponded to significant reduction in the overall number of blocks fetched
from disk to about 88% (8x). As such, the number of fetch calls made to
disk is decreased by as much as 2.2K calls. The significant decrease of disk
dependency reflects the caching efficiency introduced by H-block layout which
in turn accounts for its high performance on DFS query by as much as 8x
compared to the irregular layout as observed in the batch 1 tests.
6.2.3 Single Source Shortest Path
Final tests were carried out to take a closer look at performance of SSSP
query on WS which had shown about 4x gain in previous tests. The tests
were carried out with varying path length between a pair of connected nodes.
The duration performance showed improvement by 58.72% (2x). The Table
6.7 shows the results where the number of blocks fetched from disk is reduced
by 64.28%. On the other hand, the misses at PostgreSQL Buffer cache is
reduced by 22 fetches per query. This explains the above 2x performance
that has been achieved.
PostgreSQL cache (8KB blocks) Kernel cache (4KB blocks)
H-block 3341 1486Irregular 3363 4160
Table 6.7: Fetches per query for SSSP
43

6.3 Comparison with Neo4j
The final tests were conducted to compare the performance of H-blocked WS
graph in relational database with its equivalent irregular version deployed
in the Neo4j database. This will give the complete picture of where the
optimized RDMS stands in comparison with a specialized graph database.
The queries were of equal size in both cases covering about 10% of graph and
the start node was selected in a uniform random distribution. The results
are summarized in Table 6.8.
Irregular H-block Neo4j
BFS (sec) 18.17 16.11 0.91DFS (sec) 1.93 0.95 1.16SSSP (sec) 99.37 25.10 11.03
Table 6.8: Comparison between Irregular, H-block and Neo4j
The performance gap between relational and graph database reduced from
about 20x to 18x in case of BFS query. On the other hand, the H-blocking
surpassed the Neo4j performance by 18% gain for the DFS query. In case of
SSSP query, the gap reduced significantly from 9x to about 2x.
6.4 Discussion
6.4.1 Effect of large node on H-bock layout
An H-block layout essentially consists of recursive BFS blocks where the
number of recursion N is equal to the number of levels in memory hierarchy.
As such, a block at any level consists of smaller blocks corresponding its
previous level which are arranged in BFS order. For example, the largest
block HN consists of smaller blocks HN−1 in BFS format such that the
children of leaf nodes of block HN−1 form the roots of new HN−1 within
the HN block. In this way, the blocks are formed recursively down to the
smallest block H1. The size of any block is given by equation 6.1.
44

|Hn| = |Hn−1| × Sn
Sn−1(6.1)
where Sn is the size of the nth level in memory hierarchy. It is important
to note that this is only an ideal case relation assuming that Hn is made up
of blocks Hn−1 which are all equal in size. In most of the cases, the sizes of
constituent blocks vary.
First let us look into a simple case of how H1 is formed. During HBA
execution, every node is visited in BFS fashion starting from a certain root.
The algorithm traverses to a new BFS level only if the size of block traversed
is less than the size for first memory level S1. As the check occurs only at
the end of traversal of any given BFS level, this allows the size of H1 formed
to exceed S1. This introduces offset which increments as we move to higher
level.
If the size of first level H-block is H1 and size of a single node |N |, then the
size of second BFS level in this H-block would beH1 − |N |. Now in order to
consider the worst case scenario, let us consider the case where H1 is limiting
to S1. As such the size of second BFS level can be approximated to S1−|N |.Then the number of nodes at this level is given by ((S1−|N |)/(|N |)). There
has to be a one node less in order to blocking continue to the third BFS level
where only one node is needed to hit the threshold and the rest of nodes in
the level introduce offset. This offset is maximized with the maximization
of degree at second BFS level. The worst-case scenario is given by equation
6.2.
Offset(H1) =
(S1 − |N ||N |
− 1
)×Mavg × |N | (6.2)
whereMavg is the average degree of the top(S1−|N ||N | − 1
)th nodes with highest
degree in a graph.
Let us consider a case a higher level blocking as shown in Figure 6.2. Let
there be a block Hn which comprises of three blocks Hn−1a , Hn−1
b and Hn−1c
45

such that the root of Hn−1a is super root (ie- root of Hn) and leaves of Hn−1
a
has two child nodes which act as root of Hn−1b and Hn−1
c respectively.
Figure 6.2: H-block Hn consisting of three smaller H-blocks correspondingto n− 1 memory level
Lets consider a case where the HBA traverse the block Hn−1a and continues
to block the children of its leaf nodes separately. In the middle of this, it is
possible that the size of Hn can exceed its corresponding threshold Sn as the
algorithm checks this only at the end when all child blocks (Hn−1a , Hn−1
b and
Hn−1b ) have been traversed.
In best case scenario, the size of Hn is exactly equal to Sn and there is no
offset. The equation 6.2 for worst case scenario can now be generalized for
any H-block level as shown in equation 6.3.
Offset(Hn) ≈[Sn − |Hn−1|W|Hn−1|W
− 1
]×Mavg × |Hn−1|W (6.3)
where |Hn−1|W refers to worst case H-block size for level n− 1.
The equation shows that the chances of offset depend on memory hierarchy
and degree distribution of a graph. The higher the degree distribution and
number of memory levels used for blocking, the higher the offset introduced.
This is in line with what we would expect.
46

The offset introduced by a HN block (the highest level block) propagates
to its succeeding block resulting in incremental increase in offset with every
block as we move further down the H-block layout. Due to this, the locality of
a nodes neighbourhood decrease and it makes H-blocking less efficient whose
original purpose is to compact a nodes neighbourhood into same chunk of
memory.
This effect is prominent in scale free networks which have nodes with very
high degree and to a certain extent on random graphs as well. In order to
maintain benchmark, the experiments were carried out using same memory
hierarchy across different graphs.
6.4.2 H-block efficiency based on nature of query
Breadth First Search
Let us consider a breadth first search starting from a node A, then the H-
block containing this node is loaded to memory. Lets name this as block A.
Once the block is loaded, the query traverses breadth wise till end of the
leaves at block. Let the leaves have child nodes X, Y and Z. The blocks
corresponding to these nodes X, Y and Z are then fetched into memory. The
query continues in breadth wise order depicted as black arrows which involves
switching from block X (red) to block Y (green) to block Z (cyan) at BFS
level as shown in Figure 6.3.
The greater the degree of a node at any given level, the greater the number
of switches. Consider a case where a size of an H-block is 4KB (VM page
size), then memory utilization to fully load the neighbourhood for a node of
degree n is given as 4∗n KB. When the upper bound of allocated memory is
reached, some of the existing blocks need to be discarded. Due to this only a
fraction of such nodes neighbourhood can be loaded in memory at any given
time. This adversely affects a BFS query which involves switching between
blocks and since a part of the neighbourhood blocks get discarded for large
nodes, these blocks need to be re-fetched when BFS revisits when it moves
47

Figure 6.3: Flow path of BFS query on an H-blocked graph that involvesswitching between the red, green and cyan blocks. Also depicted is thecorresponding memory layout
to its next BFS level.
Depth First Search
The H-block format works very well for vertical traversals. Here the same
concept of re-fetching applies as discussed in the case of BFS. Re-fetching
refers to loading the same block that was previously discarded from memory.
Consider a DFS starting from a node that is stored in block B1. The query
would load B1 and move down to the furthest node from the start node in
block B4 as shown in Figure 6.4. When it completes one complete chain,
it revisits the last used block and continues recursively. As such, blocks are
revisited in the order in which they were loaded into the memory with the
most recently loaded revisited first as shown in black arrow in the figure.
Clearly, this is efficient considering a LRU based cache. Due to this, the rate
of block-re-fetching is expected to be lower compared to BFS query which
48

explains significant improvement in performance with the DFS.
Other way to look at this is as depth versus breadth trade-off. The BFS
revisits a block in FIFO order whereas DFS does so in LIFO order. Hence
with a LRU base cache, DFS has an advantage.
Figure 6.4: Flow path of DFS query on a graph and its corresponding memorylayout
Single Source Shortest Path
The H-blocking is not very efficient when it comes to traversing graph based
on the heuristic of edge distance. But as we will discuss later, the H-block
layout can be improved by introducing a better heuristic while blocking.
6.4.3 Distance Effect
The HBA showed great improvement as observed in the case with small world
graph and to a certain extent on random graphs. However, the scale free
graph did not show same change which was due to presence of large degree
nodes. One way to tackle this issue is by enforcing a priority queue during
49

blocking which orders nodes based on their degree. Those nodes that have
degree above a certain threshold which can be deemed as large nodes, can be
pushed into the priority queue. Once the blocking has been completed on the
small nodes, the nodes in priority queue can then be processed in increasing
order of their degree. This ensures that the large nodes are blocked at the end
of layout which in turn minimizes the offset. Large nodes have redundancy
in form of common neighbourhood nodes. If these nodes are processed at
the end, all of its low degree neighbours would have already been blocked
at earlier stage of layout. This is more efficient since then the gap between
parent and child block in layout would be smaller.
Figure 6.5: H-blocking on large nodes and its corresponding “Distance Ef-fect” in the memory layout
Figure 6.5 shows two pairs of child and parent blocks that are placed distantly
in the layout due to high number of siblings of the child block. The ”Distance
Effect” increases as we move down the BFS levels. As such, the distance
between B4-B8 pair is expected to be greater than the B2-B6 pair. This
effect keeps increasing till the highest-level H-block is formed and blocking
starts anew.
50

Chapter 7
Future Works
By processing the large nodes at the end, the layout can be improved for
queries that traverse in vertical direction such as DFS. It is interesting to
note that the BFS is not affected by the Distance Effect and hence the SF in
this case showed better performance. As such, there is a trade-off that exists
between these two types of query.
The number of memory levels can also lead into increase in the offset. This
can be minimized by considering only those levels of memory during block
that have significant latency between them for example from disk to DRAM.
Some small comparison tests showed that there is isnt any significant differ-
ence between HBA performance with 2 and 4 levels. However, more extensive
tests can be carried out how the performance is affected with large queries.
If the slowdown is significant then it is more sensible to reduce the number
of levels. The slowdown can be attributed due to increase in the offset that
is introduced in each block whose effect outweighs the benefit of having high
memory hierarchy whose original purpose is to reduce the latency between
two memory levels.
Following from the distance effect that we discussed, the HBA can be modi-
fied so that it is not a pure BFS traversal but also based on other heuristic
such as node centrality. This would then allow tuning of the graph between
51

the opposite extremes of DFS and BFS favouring. There is always a trade-
off between the two types of search where tuning a graph for either of them
results in less efficient layout for the other search type.
Other possible way to tackle the issue is to instead of processing large nodes at
the end, the HBA can be re-implemented so that it checks the size of H-block
upon visiting every new node. The HBA used for testing was implemented
such that the block size gets checked only at the end of a BFS level which
was mainly in order to maintain a symmetric blocking pattern. The negative
aspect of this is that it leads to a possibility of introducing offset in each of
the blocks. This can be altered by ensuring that a block is allocated whenever
its size hits the corresponding memory limit, the offset can be removed.
Let us consider an example as shown in Figure 6.6, where the blue nodes
denote a single H-block while the left out nodes D and E are depicted in
black which are added as fresh blocks at next iteration of blocking.
Figure 7.1: Sharding of H-blocks
Suppose the blocking begins from node A and continues to node C where the
block hits the size limit. The traversal should stop there and the remaining
nodes D & E should be passed as new roots to next iteration of blocking
where they get freshly blocked separately as shown in the above diagram.
However, it is important to note that excessive sharing of BFS level can
lead to large unsymmetrical blocks as shown in Figure 6.7. As such, this
methodology can be applied for only in the case of large nodes.
The sharding can be further modified so that the small degree nodes are
52

Figure 7.2: The unsymmetrical and symmetrical blocks are depicted by redand blue boundaries respectively
given preference and are visited first. This will ensure that the unvisited
nodes on a BFS level beyond the sharding point are of higher degree which
are more efficient to be blocked separately.
Lastly, the H-blocking can be modified to implement a different heuristic.
The HBA used for evalution was based on BFS scheme. However, the same
HBA can be implemented based on Dijkstra algorithm with heuristic of vis-
iting closest distance node first. Clearly, such a blocking mechanism would
perform better for SSSP query in comparison to BFS-based HBA. Similarly,
the HBA can also be implemented on DFS query which would give a layout
efficient for depth search queries.
What I have demonstrated is that the H-blocking based on BFS can improve
the performance of graph queries. This is a baseline model of how blocking
can be implemented. If needed, the order of traversal in blocking can itself
be modified to tune the final layout it generates for a specific type of query.
It would be interesting to compare the performance of different heuristics
with the BFS-based HBA as baseline mechanism.
53

Chapter 8
Summary and Conclusions
The overall performance of individual graphs across different queries is shown
in Figure 7.1. The Small World showed highest average gain followed by
Random and Scale Free graphs. The Small World showed large deviation
due to relatively slow gains observed in BFS compared to other queries. The
relative low performamce of Scale Free was due to presence of large nodes
which introduces offsets in H-blocks and slow down the efficiency of layout.
The second contributing factor is that a large neighbourhood increases the
number of block fetches which in turn diminishes the gain introduced through
better H-block layout. The final factor as discussed in the evaluation section
is that due to limited memory size, large neighbourhood lead to greater
re-fetching of blocks which adversely affects the performance. In case of
Random network, it was observed that the gains were mainly due to increase
in spatial locality of neighbouring nodes in an otherwise randomly dispered
nodes topology.
The overall performance of individual queries across different graphs is sum-
marised in Figure 7.2. The DFS showed highest gain followed by SSSP and
BFS. The SSSP showed large variation with signifiantly slow performance
in case of the Scale Free and Random graph in comparison to Small World.
The disparity was accounted due to difference in graph topology. The other
reason for low gain was was the nature of SSSP query. The H-blocking is
54

!"
#!"
$!"
%!"
&!"
'!"
(!"
)!"
*!"
+!"
#!!"
,-" -." /0"
!"#$%&'
(%
Figure 8.1: Performance of H-blocking based on graph
based on different heuristic compared to SSSP that uses priority queue based
on node distance. The DFS and BFS largely gained due to increased parent-
child and inter-sibling locality respectively. The gains in DFS was greater in
many cases where node degree was small. This allows an H-block to have
greater depth thereby favouring vertical traversals.
In conclusion, the H-blocking did show significant improvement in majority
of cases and helped close gap with Neo4j for BFS query and surpassed it
in case of DFS. The reason for performance gain was further analysed and
tracked down due to decrease in miss-rate in database buffer and kernel file
system cache which in turn reduced the overall I/O and disk access latencies
respectively. In future, there is a scope for further improvement by extend-
ing the current H-blocking algorithm using the Crackle interface. This can
be achieved by using better heuristics depending on the characterisitics of
underlying graph and the nature of graph query against which the blocking
needs to be optimized.
55

0
10
20
30
40
50
60
70
80
90
100
BFS DFS SSSP
Gain (%
)
Figure 8.2: Performance of H-blocking based on query
56

Bibliography
[1] Mark H., Facebook Now Totals 901 Million Users, Profits Slip.http://www.pcmag.com/article2/0,2817,2403410,00.asp. 2012.
[2] Neo4j graph database. http://neo4j.org/. 2012.
[3] Trinity project: Distributed graph database.http://research.microsoft.com/en-us/projects/trinity/. 2012.
[4] Yuanyuan T., Jignesh M. P., TALE: A Tool for Approximate Large GraphMatching. EECS Department, University of Michigan, 2008.
[5] AllegroGraph database.http://www.franz.com/agraph/allegrograph/. 2012.
[6] MySQL database. http://www.mysql.com/. 2012.
[7] PostgreSQL database. http://www.postgresql.org/. 2012.
[8] Serge A., Rakesh A., Phil B., Mike C., Stefano C., Bruce C.,David D., Mike F., Hector G. M., Dieter G., Jim G., LauraH., Alon H., Joe H., Yannis I., Martin J., Michael P., MikeL., David M., Jeff N., Hans S., Timos S., Avi S., Mike S.,Rick S., Jeff U., Gerhard W., Jennifer W., Stan Z., The LowellDatabase Research Self Assessment. http://research.microsoft.com/en-us/um/people/gray/lowell/LowellDatabaseResearchSelfAssessment.htm.2003.
[9] 9th DIMACS Implementation Challenge - Shortest Paths.http://www.dis.uniroma1.it/challenge9/download.shtml. 2012.
[10] Mark L., George L., A Graph-Based Data Model and its Ramifications.University of London, 1995.
[11] Jeffrey D. U., The Graph Data Model.http://i.stanford.edu/∼ullman/focs/ch09.pdf. 2012.
57

[12] Ian C., A Distributed Decentralised Information Storage and RetrievalSystem. 1999.
[13] Cantrell C. D., Types of memory.http://www.utdallas.edu/%7Ecantrell/ee2310/memtech.pdf. 2012.
[14] Lakshman A. and Malik P., Cassandra: a decentralized structured stor-age system. Operating Systems Review, 44(2):3540, 2010.
[15] Pujol J. M., Erramilli V., Siganos G., Yang X., Lauotaris N., ChhabraP., Rodriguez P., The little engine(s) that could: Scaling online socialnetworks. SIGCOMM, 2010.
[16] Guy R. G., Heidemann J. S., Mak W., JR. T. W. P., Popek G. J., Roth-meier D., Implementation of the ficus replicated file system. USENIX,1990.
[17] Adya A., Bolosky W. J., Castro M., Cermak G., Chaiken R., DouceurJ. R., Howell J., R., J., Lorch, Theimer M., Wattenhofer R. P., Far-site: Federated, available, and reliable storage for an incompletely trustedenvironment. OSDI, 2002.
[18] Satyanarayanan M., Coda: A highly available file system for a distributedworkstation environment. IEEE Transactions on Computers 39, 1990.
[19] Terry D. B., Theimer M. M., Petersen K., Demers A. J., Spreitzer M.J., Hauser C. H. , Managing update conflicts in bayou, a weakly connectedreplicated storage system. SOSP, 1995.
[20] Roberto G., Ruben C., Carmen G., Angel C., Where are my followers?understanding the locality effect in twitter. arXiv:1105.3682v1, 2011.
[21] Oracle database. http://www.oracle.com/index.html. 2012.
[22] Directed Hypergraph database. http://www.hypergraphdb.org/index.2012.
[23] Malewicz G., Austern M. H., Bik A. J., Dehnert J. C., Horn I., Leiser N.,Czajkowski G., Pregel: A system for large-scale graph processing. PODC,2009.
[24] Pearce R., Gokhale M., Amato N.M., Multithreaded asynchronous graphtraversal for in-memory and semi-external memory. IEEE InternationalConference on High Performance Computing, Networking, Storage andAnalysis, 2010.
58

[25] Kang U., Charalampos E. T., Christos F., Pegasus: A peta-scale graphmining system. IEEE International Conference on Data Mining, 2009.
[26] Amitabha R., Memory hierarchy sensitive graph layout.arXiv:1203.5675v1, 2012.
[27] Peter van E. B., Kaas R., Zijlstra E., Design and implementation of anefficient priority queue. Mathematical Systems Theory, 10:99?127, 1977.
[28] Todd C., Monica S., Anoop G., Design and evaluation of a compileralgorithm for prefetching. ACM SIGPLAN Not. 27, Issue 9, 62-73, 1992.
[29] Chilimbi T. M., Hirzel M., Dynamic hot data stream prefetching forgeneral-purpose programs. ACM SIGPLAN Not. 37, Issue 5, 199-209,2002.
[30] D. Kroft, Lockup-free instruction fetch/prefetch cache organization. InProc. of the 8th Annual Int. Symp. on Computer Architecture, 81-87,1981.
[31] D. Kroft, High-bandwidth data memory systems for superscalar proces-sor. In Proc. ASPLOS-IV Proceedings of the fourth international confer-ence on Architectural support for programming languages and operatingsystems, 53-62, 1991.
[32] Tien-Fu C., Jean-Loup B., Reducing memory latency via non-blockingand prefetching caches. In Proc. ASPLOS-V Proceedings of the fifth inter-national conference on Architectural support for programming languagesand operating system, 51-61, 1992.
[33] Norman P. J., Improving direct-mapped cache performance by the addi-tion of a small fully-associative cache and prefetch buffers. In Proc. ISCA’90 Proceedings of the 17th annual international symposium on ComputerArchitecture, 364 - 373, 1990.
[34] Changkyu and Chhugani, Jatin and Satish, Nadathur and Sedlar, Ericand Nguyen, Anthony D. and Kaldewey, Tim and Lee, Victor W. andBrandt, Scott A. and Dubey, Pradeep, FAST: fast architecture sensitivetree search on modern CPUs and GPUs. In Proc. SIGMOD ’10 Pro-ceedings of the 2010 international conference on Management of data ,339-350, 2010.
[35] PostgreSQL statistics collector. PostgreSQL 8.1.23 Documentation,http://www.postgresql.org/docs/8.1/static/monitoring-stats.html. 2012.
59