Bjornar Vik and Thor I. Fossen, 'A Nonlinear ... - MIC Journal

Optimization of AUVs propulsion system forunderwater infrastructures monitoring
MOQESM’16 - Sea Tech Week
Pablo Vega
PhD student atInstitut de Recherche Dupuy de Lome
CNRS FRE 3744PTR4 : Energie et Systemes - ENIB
Supervisor: O. Chocron Director: M. Benbouzid
Brest, 12thOctober 2016

Outline
1 Motivation
2 Our approach
3 AUV Model (solid and Hydrodynamics)
4 Control (model based)
5 Dynamic reconfiguration
6 Conclusions and perspectives
[email protected] 1 / 19 12/10/2016

Motivation
• AUV can be trusted to carry out complex missions• However, AUV development has not yet reached its full potential→ their capabilities can be still greatly improved.
• One of these characteristic is maneuverability, a key factor to achievefull autonomy.
• An enhanced maneuverability along with the possibilities offered bycurrent control methods and sensor technology could increase greatlythe complexity and reliability of AUV missions
Fig. 1. Marine turbine. EDFFig. 2. A9-EAUV ECA group
[email protected] 2 / 19 12/10/2016

Our approach
• To give AUVs the capability to reconfigure their propulsion.• Adapt the propulsive topology and control parameters to the task
dynamically.• Use of vectorial thruster to achieve propulsion reconfiguration.• Use of model-based controller to cancel out nonlinearities.• A task-based design optimized propulsion topology and controller
increases maneuverability, leading to enhanced AUV autonomy.
Fig. 3. RMCT prototype. IRDL
Robot in-verse model
PID
Referencetrajectory
+
Robot State
Computed torque control
Fig. 4. Model based controller
[email protected] 3 / 19 12/10/2016

Our approachSteps to follow
In order to implement our propulsion optimization approach we need todevelop the following elements:
• A dynamic model (solid andhydro) of an AUV. Based onprototype developed in IRDL: theRSM robot
• A control method allowing us tofollow a task trajectory.
• An optimization method in orderto find an optimal propulsiveconfiguration (topology andcontrol parameters) for a givenmission.
RSM robot (IRDL-ENIB) in Ifremer bassin
[email protected] 4 / 19 12/10/2016

AUV modelKinematics
The vectors describing the movement of the AUV in 6 DOF are:
Position and orientation in R0
η =[η1η2
]η1 =
[xyz
]η2 =
[φθψ
]
Linear and angular velocity in Rb
ν =[ν1ν2
]ν1 =
[uvw
]ν2 =
[pqr
]
Efforts in Rb
τ =[τ1τ2
]τ1 =
[XYZ
]τ2 =
[KMN
]O
x y
z
Ob
xbSurge
ybSway
Pitch
zb Heave
Yaw
Roll
η1
Coordinate frames describing the AUV
[email protected] 5 / 19 12/10/2016

AUV modelDynamics
The equation describing the underwater robot solid and hydro dynamics isthe following (Fossen):
Mν + Cν + Dν + G = τ = B up
with• M = MRB + MA, mass and inertia matrices• C = CRB + CA, coupling matrices• D = Damping matrix• G = Gravity and buoyancy• B = Thruster configuration matrix• up = Thrusters forces (thrust)
[email protected] 6 / 19 12/10/2016
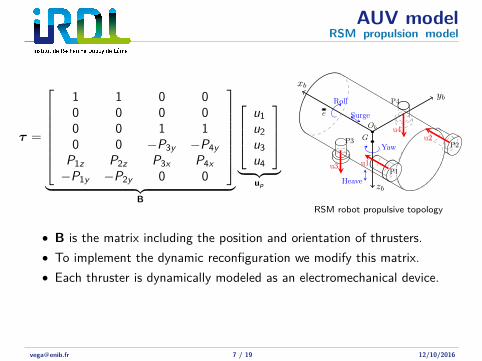
AUV modelRSM propulsion model
τ =
1 1 0 00 0 0 00 0 1 10 0 −P3y −P4y
P1z P2z P3x P4x−P1y −P2y 0 0
︸ ︷︷ ︸
B
u1u2u3u4
︸ ︷︷ ︸
up
Ob
G
e
xb
yb
zb
Roll
Surge
Heave
Yaw
u1P1
u2P2
u3
P3
u4
P4
RSM robot propulsive topology
• B is the matrix including the position and orientation of thrusters.• To implement the dynamic reconfiguration we modify this matrix.• Each thruster is dynamically modeled as an electromechanical device.
[email protected] 7 / 19 12/10/2016

Control methodComputed torque
Principle• The idea is to algebraically transform nonlinear systems into (fully or partly)
linear ones in order to apply linear control methods.
• It creates a control input able to cancel out the nonlinear effects (inertia,coupling, drag, gravitational forces and buoyancy)
ηed Λ
ddt
J−1
Ro −→ Rb
T−1
re −→ Ob
+ ekin +
νad
+ ˙ηed
Kp Eq.3.5 Σedyn τa
ddt
+νad+
νad
ηe
−
ν−ν
Feedforward
Feedforward
Kinematic Control
Dynamic control
[email protected] 8 / 19 12/10/2016

Control methodComputed torque
Two control laws in cascade:Kinematic law: Velocity
• derived from the robot inverse kinematic model.• generates the velocity reference to follow the desired trajectory.
νad = T−1 {J−1 [ηed + Λ ekin]}
with T a velocity transport matrix (rigid body kinematics)
Dynamic law: Acceleration• derived from the robot complete dynamic model.• generates the control input necessary to follow the reference velocity.
τa = M[νad + Kpedyn] + C(ν)ν + D(ν)ν + G
[email protected] 9 / 19 12/10/2016
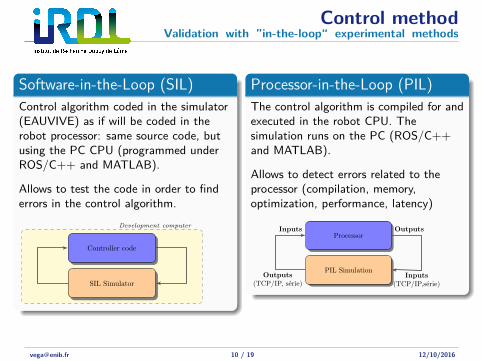
Control methodValidation with ”in-the-loop“ experimental methods
Software-in-the-Loop (SIL)Control algorithm coded in the simulator(EAUVIVE) as if will be coded in therobot processor: same source code, butusing the PC CPU (programmed underROS/C++ and MATLAB).
Allows to test the code in order to finderrors in the control algorithm.
Development computer
Controller code
SIL Simulator
Processor-in-the-Loop (PIL)The control algorithm is compiled for andexecuted in the robot CPU. Thesimulation runs on the PC (ROS/C++and MATLAB).
Allows to detect errors related to theprocessor (compilation, memory,optimization, performance, latency)
Processor
PIL SimulationInputs
(TCP/IP,serie)
Inputs Outputs
Outputs(TCP/IP, serie)
[email protected] 10 / 19 12/10/2016
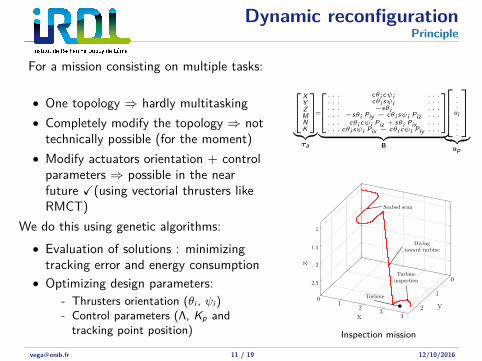
Dynamic reconfigurationPrinciple
For a mission consisting on multiple tasks:
• One topology ⇒ hardly multitasking• Completely modify the topology ⇒ not
technically possible (for the moment)• Modify actuators orientation + control
parameters ⇒ possible in the nearfuture X(using vectorial thrusters likeRMCT)
We do this using genetic algorithms:• Evaluation of solutions : minimizing
tracking error and energy consumption• Optimizing design parameters:
- Thrusters orientation (θi , ψi )- Control parameters (Λ, Kp and
tracking point position)
[ XYZMNK
]︸︷︷︸
τa
=
[ . . . cθi cψi . . .. . . cθi sψi . . .. . . −sθi . . .. . . −sθi Piy − cθi sψi Piz . . .. . . cθi cψi Piz + sθi Pix . . .. . . cθi sψi Pix − cθi cψi Piy . . .
]︸ ︷︷ ︸
B
...
ui...
︸︷︷︸
up
01
23
4
0
1
2
1
1.5
2
2.5
Seabed scan
Divingtoward turbine
Turbineinspection
Turbine
xy
z
Inspection mission
[email protected] 11 / 19 12/10/2016
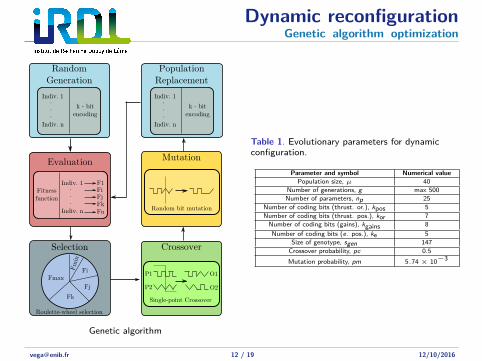
Dynamic reconfigurationGenetic algorithm optimization
Random Generation
Evaluation
Selection Crossover
Mutation
Indiv. 1
.
.
.
Indiv. n
k - bitencoding
Indiv. 1
.
.
.
Indiv. n
Fitnessfunction
F1FiFjFkFn
Fmax
Fm
in
Fi
Fj
Fk
Roulette-wheel selection
P1
P2
O1
O2
Single-point Crossover
Random bit mutation
Population Replacement
Indiv. 1
.
.
.
Indiv. n
k - bitencoding
Genetic algorithm
Table 1. Evolutionary parameters for dynamicconfiguration.
Parameter and symbol Numerical valuePopulation size, µ 40
Number of generations, g max 500Number of parameters, np 25
Number of coding bits (thrust. or.), kpos 5Number of coding bits (thrust. pos.), kor 7
Number of coding bits (gains), kgains 8Number of coding bits (e. pos.), ke 5
Size of genotype, sgen 147Crossover probability, pc 0.5Mutation probability, pm 5.74 × 10−3
[email protected] 12 / 19 12/10/2016

Dynamic reconfigurationResults - Seabed scanning
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
Generation
Fitness
Best FitnessAverage fitness
35.52
29
Fitness evolution
0 100 200 300 400 500−2
−1
0
1
Generation
Orient.
[rad]
θ2 ψ2
0.21 ≡ 12.03°
−0.83 ≡ −47.55°
0 100 200 300 400 500
−1
0
1
2
Generation
Orient.
[rad]
θ4 ψ4
−0.41 ≡ −23.5°
−0.31 ≡ −17.76°
0 100 200 300 400 500
−1
0
1
Generation
Orient.
[rad]
θ3 ψ3
0.18 ≡ 10.31°
−1.57 ≡ −90°
0 100 200 300 400 500
0
1
Generation
Orient.
[rad]
θ1 ψ1
−0.73 ≡ −41.83°
1.47 ≡ 84.22°
0.22
0.24
0.26
0.28
0.3
Position[m
]
Pex
0.29
Best propulsive configuration
Final Λ = 1Final Kp = 1.5
[email protected] 13 / 19 12/10/2016
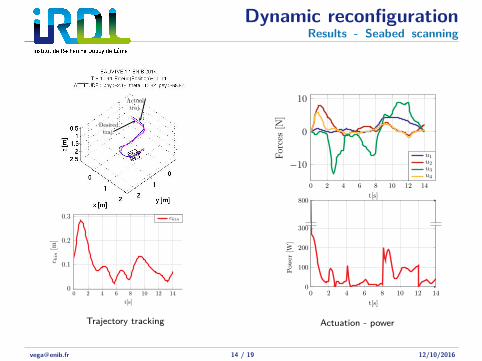
Dynamic reconfigurationResults - Seabed scanning
Desiredtraj.
Actualtraj.
0 2 4 6 8 10 12 140
0.1
0.2
0.3
t[s]
e kin
[m]
ekin
Trajectory tracking
0 2 4 6 8 10 12 14
−10
0
10
t[s]
Forces[N
]
u1u2u3u4
800
0 2 4 6 8 10 12 140
100
200
300
t[s]
Pow
er[W
]
Actuation - power
[email protected] 14 / 19 12/10/2016

Dynamic reconfigurationResults - Diving
0 50 100 150 200 250 300 350 400 450 5000
10
20
30
40
Generation
Fitness
Best FitnessAverage fitness
36.4
29.32
Fitness evolution
0 100 200 300 400 500
−1
0
1
2
Generation
Orient.
[rad]
θ2 ψ2
1.17 ≡ 67.03°
−0.36 ≡ −20.62°
0 100 200 300 400 500
−1
0
1
Generation
Orient.
[rad]
θ4 ψ4
0
0
0 100 200 300 400 500
−1
0
1
Generation
Orient.
[rad]
θ3 ψ3
−1.35 ≡ −77.35°
0.23 ≡ 13.18°
0 100 200 300 400 500
−1
0
1
Generation
Orient.
[rad]
θ1 ψ1
−0.4 ≡ −23.5°
0.0 ≡ 0°
0.1
0.2
0.3
Position[m
]
Pex
0.3
Best propulsive configuration
Final Λ = 0.5Final Kp = 2.75
[email protected] 15 / 19 12/10/2016

Dynamic reconfigurationResults - Diving
Desiredtraj.
Actualtraj.
0 2 4 6 8 10
0.1
0.2
0.3
t[s]
e kin
[m]
ekin
Trajectory tracking
0 2 4 6 8 10
0
5
t[s]
Forces[N
]
u1u2u3u4
800
0 1 2 3 4 5 60
100
200
300
t[s]
Pow
er[W
]
Actuation - power
[email protected] 16 / 19 12/10/2016

Dynamic reconfigurationResults - Tomography
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 3000
10
20
30
Generation
Fitness
Best FitnessAverage fitness
34.17
30.04
Fitness evolution
0 50 100 150 200 250 300−1
−0.5
0
0.5
Generation
Orient.
[rad]
θ2 ψ2
0
−0.51 ≡ −29.22°
0 50 100 150 200 250 300−1
0
1
Generation
Orient.
[rad]
θ4 ψ4
1.17 ≡ 67°
0.95 ≡ 54.43°
0 50 100 150 200 250 300
−1
0
1
Generation
Orient.
[rad]
θ3 ψ3
0.16 ≡ 9.17°
1.57 ≡ 90°
0 50 100 150 200 250 300
−1
0
1
Generation
Orient.
[rad]
θ1 ψ1
−0.82 ≡ −47°
1.52 ≡ 87°
0.1
0.2
Position[m
]
Pex
0.04
Best propulsive configuration
Final Λ = 0.25Final Kp = 9.25
[email protected] 17 / 19 12/10/2016

Dynamic reconfigurationResults - Tomography
Desiredtraj.
Actualtraj.
0
0.2
0.4
e kin
[m]
0 2 4 6 8 10
0
5 · 10−2
0.1
e ψ[rad
]
ekineψ
Trajectory tracking
0 2 4 6 8 10−40
−20
0
t[s]
Forces[N
]
u1u2u3u4
800
0 1 2 3 4 5 60
200
400
t[s]
Pow
er[W
]
Actuation - power
[email protected] 18 / 19 12/10/2016

Conclusions and perspectives
• Genetic algorithms allow to find an optimal propulsive configuration fora given task (in this work it includes thruster orientation, tracking pointposition and control gains).
• A robot using this technique could be optimally adapted to a missionincluding any number of tasks or sub-tasks. For instance seabedscanning could be split into a straight line and sharp turns.
• Current advances in reconfigurable thruster technology can make thistechnique applicable in the near future (such as RMCT work inIRDL-ENIB).
• The application of the genetic algorithm is susceptible of being improved(use of different GA techniques, improvement in the fitness functions...)
• Other control methods can be included as well in the optimization(robust, adaptive).
• Global optimization can be achieved adding other design parameters.
[email protected] 19 / 19 12/10/2016

Thank you foryour attention!AnyQuestions?

![short FormatedDraft - Automatic Fault Diagnosis for AUVs ... · II. PROBABILISTIC TOPIC MODELS FOR FAULT DETECTION AND DIAGNOSIS IN AUVS LDA [2] is a generative probabilistic topic](https://static.fdocuments.us/doc/165x107/5e7856d36b5366232b665ad5/short-formateddraft-automatic-fault-diagnosis-for-auvs-ii-probabilistic-topic.jpg)