Optimal placement of energy dissipation devices for three-dimensional structures
13
ELSEVIER S0141-0296(96)00034-X Engineering Structures, Vol. 19, No. 2, pp. 113-125, 1997 Copyright © 1996 Elsevier Science Ltd Printed in Great Britain. All rights reserved 0141-0296/97 $17.00 + 0.00 Optimal placement of energy dissipation devices for three- dimensional structures Bo Wu and Jin-Ping Ou Research Institute of Engineering Science and Technology, Harbin University of Architecture and Civil Engineering, Harbin, China T. T. Soong Department of Civil Engineering, State University of New York at Buffalo, Buffalo, NY 14260, USA (Received October 1995; revised version accepted Februar)' 1996) In recent years, serious efforts have been undertaken to develop the concept of energy dissipation or supplemental damping into a workable technology, and a number of these devices have been implemented to structures in the US and elsewhere. As appli- cations of this technology accelerate, an increasingly important issue is one of positioning these devices in a structure to maximize their effectiveness at minimum cost. This paper addresses this opti- mal placement problem when applied to structures where both translational and torsional responses are of major concern. Optim- ization procedures due to translation-torsion coupling effects or due to unsymmetrically placed devices are developed and verified through numerical examples. The effect of ground motion charac- teristics on the positioning of energy dissipation devices is also examined. Copyright © 1996 Elsevier Science Ltd. Keywords: passive energy dissipation, structural dynamics, wind and earthquake engineering 1. Introduction The past few years have seen an accelerated growth in the development and structural applications of energy dissi- pation devices, such as viscoelastic dampers, viscous fluid dampers, friction dampers and metallic yield dampers, for wind and earthquake hazard mitigation. An increasing num- ber of these devices have been installed in structures throughout the world t. The idea behind adding these devices to a structure is to enhance its energy dissipation capacity against environmental loads, providing an alterna- tive to conventional wind or earthquake resistant design and retrofit. It has the potential for significantly reducing wind- or earthquake-induced risk without compromising safety, reliability and economy of the constructed facilities 2'3. In order to use these devices economically, optimization of their locations in a structure is an important issue and this problem has been studied by several researchers 4'5. However, the structural models used in these studies have been restricted to plane frame models. As a result, several response characteristics, such as the coupling effect between translational and torsional responses of an unsym- metrical structure, cannot be accounted for. In this paper, the problem of optimizing the locations of passive energy dissipation devices when incorporated into three-dimensional (3D) structures is addressed. Interstorey drifts of 3D structures, which may be caused by both inter- storey translational and torsional responses, are taken as the performance index to evaluate structural safety. The pro- posed optimization procedure is followed by verification through numerical examples. Furthermore, the effect of the parameters of the employed earthquake ground motion model on the optimal device locations is discussed, and the torsional effect of a six-storey original symmetrical struc- ture with unsymmetrically added devices is evaluated. 2. Translation-torsion coupling effect In this study, the structural model used is an N-storey 3D shear-type building as shown in Figure 1. The mass of each storey is assumed to be concentrated at each floor level. Let xj and 0/. be, respectively, the translational displacement 113
Transcript of Optimal placement of energy dissipation devices for three-dimensional structures

ELSEVIER S0141-0296(96)00034-X
Engineering Structures, Vol. 19, No. 2, pp. 113-125, 1997 Copyright © 1996 Elsevier Science Ltd
Printed in Great Britain. All rights reserved 0141-0296/97 $17.00 + 0.00
Optimal placement of energy dissipation devices for three- dimensional structures Bo Wu and Jin-Ping Ou
Research Institute of Engineering Science and Technology, Harbin University of Architecture and Civil Engineering, Harbin, China
T. T. Soong
Department of Civil Engineering, State University of New York at Buffalo, Buffalo, NY 14260, USA
(Received October 1995; revised version accepted Februar)' 1996)
In recent years, serious efforts have been undertaken to develop the concept of energy dissipation or supplemental damping into a workable technology, and a number of these devices have been implemented to structures in the US and elsewhere. As appli- cations of this technology accelerate, an increasingly important issue is one of positioning these devices in a structure to maximize their effectiveness at minimum cost. This paper addresses this opti- mal placement problem when applied to structures where both translational and torsional responses are of major concern. Optim- ization procedures due to translation-torsion coupling effects or due to unsymmetrically placed devices are developed and verified through numerical examples. The effect of ground motion charac- teristics on the positioning of energy dissipation devices is also examined. Copyright © 1996 Elsevier Science Ltd.
Keywords: passive energy dissipation, structural dynamics, wind and earthquake engineering
1. Introduction
The past few years have seen an accelerated growth in the development and structural applications of energy dissi- pation devices, such as viscoelastic dampers, viscous fluid dampers, friction dampers and metallic yield dampers, for wind and earthquake hazard mitigation. An increasing num- ber of these devices have been installed in structures throughout the world t. The idea behind adding these devices to a structure is to enhance its energy dissipation capacity against environmental loads, providing an alterna- tive to conventional wind or earthquake resistant design and retrofit. It has the potential for significantly reducing wind- or earthquake-induced risk without compromising safety, reliability and economy of the constructed facilities 2'3.
In order to use these devices economically, optimization of their locations in a structure is an important issue and this problem has been studied by several researchers 4'5. However, the structural models used in these studies have been restricted to plane frame models. As a result, several response characteristics, such as the coupling effect
between translational and torsional responses of an unsym- metrical structure, cannot be accounted for.
In this paper, the problem of optimizing the locations of passive energy dissipation devices when incorporated into three-dimensional (3D) structures is addressed. Interstorey drifts of 3D structures, which may be caused by both inter- storey translational and torsional responses, are taken as the performance index to evaluate structural safety. The pro- posed optimization procedure is followed by verification through numerical examples. Furthermore, the effect of the parameters of the employed earthquake ground motion model on the optimal device locations is discussed, and the torsional effect of a six-storey original symmetrical struc- ture with unsymmetrically added devices is evaluated.
2. Translation-torsion coupling effect
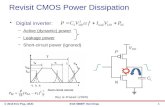
In this study, the structural model used is an N-storey 3D shear-type building as shown in Figure 1. The mass of each storey is assumed to be concentrated at each floor level. Let xj and 0/. be, respectively, the translational displacement
113

114 O p t i m a l p l a c e m e n t o f e n e r g y d i s s i p a t i o n d e v i c e s f o r 3 D s t r u c t u r e s : B. W u et al.
i i:i: ;;lli : / Figure 1 Structural model and damper position
X
at the mass centre of the jth floor and the torsional angle of the same floor relative to the ground. For convenience, it is further assumed that the torsional angle of the ground is zero. The jth floor and its basic variables are shown in F i g u r e 2, in which ))-t and .y/are, respectively, the resultant shear forces in the columns of the jth and (j + 1)th floors in the direction of x, and rj_~ and r# are, respectively, the resultant torque moments at the fib and the (j + 1 )th floors due to shear forces in the columns. The equations of motion of the jth floor are
mfir + yj l - y i = O (1)
j /0 /+ rj_, - r: = 0 (2)
where
/
r / , = ~ ' . k ) : . , [ % + 6,,oj) i=1
/
- (X:-, + l:.~0:_,)] + ~C/.,I/.i i=l
[ (~: /+ t .O:) - % , + t : ,O/, )1
= B i ( X / - Xi ' ) + Dr(k] - k/-, )
+ E/(O i - Oi_,) + F / ( O / - Or ' )
rj = B/+,(X]+, - X/) + Dr+,(±~+, - k/)
+ Er+,(O/+, - O/) + F~+,(O/+, - O r)
(5)
(6)
in which m/and Jr are, respectively, the mass and moment of inertia of the jth floor; k v and C:,i are the stiffness and viscous damping coefficient of the ith plane frame at the jth floor, respectively; lj.i is the distance from the mass centre of the jth floor to the ith plane frame and has a posi- tive value if the ith plane frame is located on the left of the mass centre, otherwise its value is negative, I is the total number of plane frames, and
I I
K~ = E~r , , cr = E c ] , , i - I i--I
l 1
D] = E~:.! , . , e~ = Ek~.,.!~,, i - I i-I
I
F/ E c l~ = i,i i i -I
/
8 ] = Zk: , , ! ] , , i= I
(7)
Substituting equations (3 ) - (6 ) into equations (1) and (2), we have
I
Yj I = E k j . i [ ( x r nu l j i O j ) -- ( X j - I i=1
I
"~- !r,iOj_l ) ] "1- E c r , i[ (.~-r "4- lj, kOj ) i=1
- % - , + 6 . £ - , ) ]
= K / ( X / - Xi- , ) + C/(±J - k i - i )
+ B/( O i - 0/_, ) + D/( 0 i - O r , )
Y / = K/+'(Xr+, - X/) + G+,(k/+, - 2/)
-~- B j + , ( 0 ] + 1 - - Oj) -1- Dj+,( Oj+, - 0/)
(3)
(4)
//mass center /
,~,p,.7/_ -- / / / YH ,
Figure2 State variables at each floor
m i y / - C~r , + ( q + q+,)kJ - G+,JCj+l
- D , O , , + ( D r + D/+, )0, - D,+, 0,+,
- K/xr , + ( E + K/+,)xj - K;+,X~+l
- er0:_, + ( g / + 8r+,)0~ - Br+,0~+, = 0
j / o / - Di2 i , + ( D i + D/+,)kj - Di+tki+ I
- F/O/_, + ( F i + F j + , ) O / - Fi+,O/+ ,
- B e : , + ( B / + B:+,)xj - Bj+,x:+,
- E/Oj , + (Ej + G , ) O i - G , o / + , = o
( 8 )
(9)
In order to assess the coupling effect between trans- lational displacement of the mass centre and the torsional angle, a six-storey building, whose configuration is similar to F i g u r e 1, is considered here as an example structure. Its parameter values are given in Table 1, where lH4 is the eccentric distance between the geometric centre and mass centre of the jth floor. The maximum relative displacements of the mass centres and the maximum torsional angles at different floors subject to the E1 Centro earthquake ground acceleration with a peak acceleration of 500 cm/s 2 are, respectively, plotted in Figure s 3a and b. It can be seen from these figures that, with the increase of eccentric dis-

Opt imal p lacement o f energy dissipat ion devices for 3D structures: B. Wu et a l .
Table 1 Parameters for example structure
1 1 5
Moment of inertia Stiffness (kN/cm) Damping (kN • s/cm) Floor Mass (kg) (kg - m 2) k~l = k/,2 . . . . . ki,6 c1,1 = Cj ,2 . . . . . Cl,6
1 3105 173 880 421.7 2,91 2 3105 173880 421.7 2,91 3 3105 173 880 286.6 1.98 4 3105 173 880 286.6 1,98 5 3105 173 880 164.5 1.44 6 3105 173880 164.5 1.44
Case 1:/He1 = IHc2 . . . . . /Hc6 = 0 Case 2: IHcl = IHc2 . . . . . /Ha = 3 m Case 3: lee1 = /Hc2 . . . . . /Hc6 = 5 m
6 u
> ~4 .-i
~2 0 I t .
0
0 5 (a)
1 I I I I I I , I I
10 15 20 25 30 35 Max. Relative Disp. of Mass Center(cm)
i _
oz iiiii iiiiiiiiiiiiiiii iiiiii 'T O
0 5 10 15 20 25 (b) Max. Interstory Tor. Angle (xl0"Jrad)
Figure 3
_ 6 (9 ~ 4 t . _
u- 0 I I 1 I J , ! ,
0 2 4 6 8 10 Maximum Interstory Drift (cm)
" I t c a s e 1 O c a s e 3 - - ~ c a s e 2 i I
(c)
Responses for different eccentric distances
tance, not only the maximum torsional angles at different floors but also the maximum relative displacements of the mass centres increase. Obviously, this will result in an increase in the maximum interstorey drifts as shown in Figure 3c and possible damage to the structure.
We first restrict our attention to the case of eliminating torsional response through the optimal placement of energy dissipation devices. It is further assumed that: (a)devices are added between neighbouring floors as shown in Figure 1; and (b) the stiffness and equivalent viscous

116 Optimal placement of energy dissipation devices for 3D structures: B. Wu et al.
damping coefficients are available from the dimensions and mechanical properties of the devices.
It can be seen from equations (8) and (9) that, if the values of D/and Bj(j = 1,2,...,N) are exactly equal to zero, they can be further reduced to
m;X/- CikJ , + (C/ + C/+,)k:- C/+,k/+,
- KiX i , + (K i + K/+, )Xi - K/+,Xi+, = 0
F,O, . + (F, + 6+.)0,- g..o,+. - F_~Oj , + ( E / + E:+,)o~ - E:+,o~+, = o
(lO)
(11)
Since the torsional angle of the ground, 0o, is assumed to be zero, the initial conditions are
= 0 = o cJ = 1 , 2 , . . . , N ) (12)
It can be found from equation (11) that the resultant tor- sional response Oi( t )=O(j= 1,2,...,N;t >- 0). Thus, the requirement for completely eliminating the torsional response of 3D structures can be written as
D i = 0 and B i = 0, (j = 1,2,...,N) (13)
Let Cj~,i and ~'~ be, respectively, the stiffness and viscous damping coefficient of the ith plane frame at the jth floor without the energy dissipation devices; c~ and kf~ are, respectively, the additional stiffness and viscous damping coefficient at the same location due to the addition of the devices, and
Cj, i Cj , i "[" C j d . . . . . i , , (14)
In order to completely eliminate the torsional response, we can choose the device locations first, and then determine the values of c~i and k~: according to equations (7), (13) and (14). Finally, the dimensions and mechanical properties of the devices to achieve such values are determined.
In general, the additional viscous damping coefficient due to the addition of energy dissipation devices can be very large, but the additional stiffness is limited, so one of the requirements given in equation (13), Dj = 0, can be eas- ily met, but the other, Bj = 0, is difficult to satisfy at the same time. Thus, in most cases, torsional response cannot be completely eliminated. In what follows, in order to reduce the torsional response to a minimum, an iterative procedure for determining the optimal values of Kj, Q, Bj, Dj, E /and Fj (j = 1,2,...,N) is proposed by iteratively solv- ing an optimal problem whose objective function is the ran- dom torsional response of a structure by means of the trans- fer matrix method.
2.1. Transfer matrix formulat ion for torsional response
The transfer matrix method has been widely used as a con- venient way of finding the dynamic characteristics and responses of chain-like systems. It is adapted here for find- ing the torsional response because it can be easily formu- lated and programmed. Another advantage of the transfer matrix approach is that a change in the properties of any floor can be easily taken into account without much compu-
tational effort, thus making it well suited to an iterative procedure like that presented herein.
In the frequency domain, equations ( 1 ) - (3) and (5) can be rewritten as
Yi = Yj , - mi0)eX9 15)
~_, = (K i + iG0))X i - (Kj + iC0))X i ,
+ (B i + iDioa)O: - (B i + iDi0))O/_, 16)
R i = Ri_ ~ - Ji0)20i 17)
R&, = (B/ + iD/0) )X/ - (B i + iDi0))X i ,
+ (E~ + iFjoo)O/- (Ej + iFi0))O i , 18)
where X, Y, O and R are the Fourier transforms of x, y, 0 and r, respectively. Therefore,
Kj + iC/w 0 Bj + iDi0) Yj
o o j:0)2 o,
t-B~ + D/0) 0 Ej + iFj0) 0 R I
K i + iCi0) 1 B /+ iDi0) Yi 1
= 0 0 0 O;_~
B/ + iD/0) 0 E~ + iFj0) 1 R) ,
(19)
which can be condensed to
G/Zi = QiL- , (20)
or
(21)
Special attention is needed in deriving the transfer matrix between the ground and the first floor, which is given as the transfer relationship between ground acceleration and first-storey generalized displacements, i.e.
I ml 0)2 1
Ki + iCi0)
B~ +~'D~0) 0
0 ][x Bi + iD10) YI
JI 0)2 O I
El + iFi0) 0 Ri
0 1 0 0
(K~ + iCl0))/0) 2 1 Bt + iDa0) 0 z
0 0 0 1
(BI + iDlw)/0) 2 0 El + iF10) 1
/ 2o
Vo
Oo
Ro
(22)
or
21 = G I I 0 1 Z o = T1Zo (23)
where J~o and Oo are, respectively, the Fourier transforms of the ground acceleration and torsional angle. The relation between Zj and Zo is given by
Z = ~ - 1 .... , ]V~Z o (24)

Optimal placement of energy dissipation devices for 3D structures: B. Wu et al. 117
To find the response at any floor, we need to use the boundary conditions at the ground (the ground acceleration and torsional angle) and at the top (zero shear force and torque moment). It has been assumed that the ground tor- sional angle can be ignored, hence Oo = 0. In addition, let Xo be the Dirac delta function so that its Fourier transform is unity. Then the responses xj, Yi, 0i and rj are the impulse response functions, and their Fourier transforms Xj, ~., Oj and R s are the frequency response functions. Thus, the boundary conditions at the top and at the base of the build- ing are, respectively,
Ro
(25)
Substituting equation (25) into equation (24) and letting j in equation (24) take the value of N, we have
= [ e z , P22 P23 P241
[ON = p ]P31 P32 P33 P34[ (26)
~,Ro I-P41 P 4 2 P 4 3 P44 I Ro
where matrix P is the product of all transfer matrices. We now have
P 4 1 P 2 2 - P 2 1 P 4 2 P e l P 4 4 - P 4 1 P 2 4 R,,
P 2 4 P 4 2 - P44P22 ' Y O = P 4 2 P 2 4 - P 2 2 P ~
XN = Ptl + PI2Yo + PI4Ro
ON ---~ P31 + P32Yo + P34Ro
(27)
(28)
With the transfer matrix formulation, we can proceed to find the statistics of the response due to an earthquake exci- tation.
The interstorey torsional angle between the jth and ( j - 1 )th floors can be written as
uj = 0 j - 0~_, (29)
In the frequency domain, we have
= o j - ( 3 0 )
It has often been assumed that the strong shaking portion of a typical earthquake accelerogram is stationary, as is the corresponding structural response. Consequently, the earth- quake ground acceleration has often been modelled as a stationary stochastic process with zero mean and power spectral density function ~x,~,,(w) given by
S 2 (31)
where %, ~ and S are parameters that depend on the inten-
sities and characteristics of earthquakes in a particular geo- logical location.
Using this characterization, we can now find the mean square response o-]~ of the structure at every floor by
o~, i = [Ujl 2 q~v,,v,,(o~)dw (j : 1,2,...,N) (32)
2.2. l terat ive opt imizat ion procedure
It can be found from equations (7) and (14) that parameters Kj, Ci, Bj, D s, Ej and F i are not independent, and their relationship should be determined according to the dimen- sions and locations of the devices. Let
1
i--I
1
D O = 2¢°Js,~ i= 1
I
: 5 ' c912 , ~ Jd .Id i=1
1
i=1
1 0 2
i~ I
/
g 0 = E k O i [ j , i
i=1
(33)
and
cr], max = max(o-],,,o']~2," ' '~U) (34)
For the case of adding at most m devices with deterministic mechanical properties and variable dimensions to each floor, the upper limit of Dj is D ° + mc%.u and the lower limit is D ° ÷ mcqs,~, where c" is the largest allowable equi- valent viscous damping coefficient of one device. Now, the optimal values of parameters Kj, C/, B~, Dj, Ej and Fj can be determined by repeatedly solving the following opti- mal problem:
f find D~(j = 1,2,...,N)
minimize o"~ max
subject to D ° + mc~!i.l < -- Dj < -- D ° + mc~!j.u
(35)
The step-by-step iterative procedure can be stated as
(a) Take Ky, Cy, B °, D °, ~ and ~ (j = 1,2,...,N) as initial parameter values
(b) Obtain new values of Dj(j= 1,2,...,N) by solving equation (35) using one of the available optimizing algorithms 6, and designate the resultant D s as D). If D) is larger than D °, the devices added to the jth floor should be placed at the right of the mass centre, and otherwise at the left. Obviously, it can be seen from equations (7) and (14) that it is more economical to locate devices at the Nth plane frame or at the first plane frame
(c) Determine the sizes of the devices added to different floors so that the values of D~ for the structure with additional devices are exactly equal to DJ
(d) According to the dimensions and mechanical proper- ties of the additional devices, calculate new values of Kj, C i, Bj, Ej and F s based on equations (7) and (14),

118 Optimal placement of energy dissipation devices for 3D structures: B. Wu et al.
and then designate the new values as K), C), B/, EJ and FJ
(e) Repeat steps (b), (c) and (d) until
[Dr + ' - D;I G e (36)
where e is the convergent precision index
2.3. Numerical example The example structure discussed above is considered here again but the parameter values are changed as listed in Table2. The values of w~,, ~.~ and S in equation (31) are taken to be 18.85 rad/s, 0.65 and 38.3 cm 2 - rad / s 3, respect- ively, which are representative of firm soil conditions. For the purposes of carrying out the numerical calculations, vis- coelastic (VE) dampers are used whose mechanical proper- ties are as follows: G ' = 286.6 N/cm 2, G" = 430.3 N/cm 2, with G ' and G" representing the shear storage and shear loss moduli of the viscoelastic material. The maximum allowable value of A/t (area to thickness ratio) is 80 cm. These values correspond to a stiffness and equivalent vis- cous damping coefficient of k = 4 1 . 2 8 k N / c m and C,~q = 4.81 k N . s/cm. For the case of adding at most six VE dampers with the mechanical properties and variable dimensions to each storey, the values of mc"lj,N and mc"!i,t, parameters in equation (35), are taken to be 2.79 x 104 kN/s and -4 .42 x 10 4 kN/s, respectively. The optimal values of D r and minimum o-], .... at selected iter- ation steps are listed in Table 3. In order to make the values of Dj(j = 1,2,..., N) for the structure with additional VE dampers exactly equal to their optimal values, the damper dimensions are calculated as listed in Table 4. For con- venience, we call the damper with the maximum allowable value of A/t the standard damper.
To verify the optimality of these parameter values, the maximum interstorey drifts and torsional angles at different floors subject to the E1 Centro earthquake ground acceler- ation with a peak of 500 cm/s 2, respectively, are plotted in Figures 4a and b for four different sets of values of K i, C s, B i, D r, E s and Fs( J" = 1,2,...,N), with case 1 corresponding to the values found by the proposed procedure; case 2 and case 4, respectively, corresponding to the upper and lower limits of D r and the related Ks, C s, Bj, E s and F~; and case 3 corresponding to ~ , ~ , B/°, D°/, ~ and ~ . In order to check the effect of decreasing torsional responses on reduc- ing translational displacements of the mass centres, the maximum translational responses of the mass centres are plotted in Figure 4c. It can be seen from Figure 4 and Table 3 that
(1) With a decrease in torsional response, the maximum interstorey drift is also reduced
T a b l e 2 Paramete rs fo r e x a m p l e s t ruc ture
(2) With a decrease in torsional response, on the contrary, the maximum interstorey drift of the mass centre some- times increases
(3) When K s, Q, B i, D r, Ej and F; take their optimal values, the mean-square interstorey torsional responses at dif- ferent floors become closer to each other than those corresponding to the original structure
(4) The optimal value of D r is not equal to its upper or lower limits, implying that adding more VE dampers may not always result in better structural performance
3. Interstorey drift
In some cases, interstorey drifts of unsymmetrical struc- tures, which are caused by both interstorey translational dis- placements of mass centres and interstorey torsional response, can be taken as the performance index to evaluate the structural safety of structures. It is well known that for devices such as VE dampers that the larger the shear defor- mation, the more effective the devices are. Hence, optimal locations for these devices correspond to positions where the relative displacements of the uncontrolled structure are the largest.
In Reference 4, a sequential procedure for optimal device placement is proposed for plane structural frames. In order to take the torsional effect of a real 3D structure into account, an attempt is made here to extend the above pro- cedure to solve the device location problem for 3D struc- tures.
3.1. Optimal location indices Consider again the N-storey space shear-type building as shown in Figure 1. To restrict our attention to the optimal placement of energy dissipation devices, it is further assumed as before that: ( a )dev ices are added between neighbouring floors as shown in Figure 1; and (b) the stiff- nesses and equivalent viscous damping coefficients are available from the dimensions and mechanical properties of the devices.
The interstorey drift of the ith plane frame between the j th floor and the ( j - 1)th floor can be written as
u i j = x i + 6 . , o i - XJ , - 1~_,.,o~ ,
(37)
In the frequency domain, we have
v i i = x i + ls,,O~ - x ; _ , - lj ,,,Oj_,
(38)
where X s and O/, the Fourier transforms of x s and 0s, can
M o m e n t o f iner t ia S t i f fness ( kN /cm) D a m p i n g ( kN . s /cm) F loor Mass (kg) ( kg . m 2) k/,1 = kj,2 . . . . . kj,6 cj,1 = ci,2 . . . . . ci,6
1 3105 173880 286.6 1.98 2 3105 173 880 286.6 1.98 3 3105 173880 286.6 1.98 4 3105 173 880 286.6 1.98 5 3105 173 880 286.6 1.98 6 3105 173 880 286.6 1.98
IHc~ = IHc2 . . . . . IH~ = 2 m ki, . ci, i and IHcj are as de f i ned in T a b l e 1

Tab
le 3
O
pti
ma
l va
lue
s at
se
lect
ed
ite
rati
ve s
tep
s
¢3
cb
~b
o ..,%
Cb
(n
Va
lue
s o
f D
j (x
l04
kN
• s
) R
esp
on
se o
-2. (
xlO
-7 r
ad 2)
Ste
p
D1
02
03
04
D~
De
0-2,~
o2, 2
0-
2, 3
02, 4
O
2u,
~2u,
~
~,×
0 10
30
50
70
90
110
130
150
170
190
210
233
-0.2
376
2.73
93
2.35
84
2.24
47
2.44
39
2.65
85
2.60
45
2.58
67
2.55
75
2.52
53
2.52
06
2.45
15
2.42
02
-0.2
37
6
-0.2
14
7
2.74
00
2.76
10
2.01
63
2.32
65
2.35
49
2.45
72
2.39
57
2.36
91
2.37
55
2.35
89
2.38
52
-0.2
37
6
-0.3
67
2
2.74
37
1.47
32
1.87
34
2.55
87
2.69
91
2.66
12
2.67
81
2.50
14
2.49
18
2.22
25
2.04
29
-0.2
37
6
-3.7
52
9
2.72
13
0.91
91
1.22
03
1.57
24
1.71
14
1.54
37
1.57
91
1.56
12
1.55
46
1.54
60
1.54
64
-0.2
37
6
1.58
34
-0.8
24
2
2.74
18
1.97
48
2.46
80
2.72
05
2.49
76
2.59
85
2.19
22
2.21
15
1.67
10
1.37
58
-0.2
37
6
0.27
91
4.38
86
2.22
55
2.77
90
2.43
65
1.21
31
-0.1
881
-0.2
92
3
-0.1
16
6
-0.2
36
6
-0.2
41
4
-0.2
61
13
45.3
710
0.66
58
0.46
54
0.44
52
0.42
44
0.47
81
0.46
49
0.45
24
0.44
64
0.43
92
0.43
67
0.42
62
0.42
33
9.04
01
8.75
70
0.54
79
0.51
60
0.54
87
0.48
83
0.48
77
0.47
76
0.47
61
0.47
44
0.47
22
0.46
73
0.46
34
5.82
95
6.07
63
0.47
37
0.76
90
0.51
92
0.44
68
0.46
66
0.45
26
0.45
44
0.43
26
0.43
02
0.43
18
0.46
16
3.31
21
7.28
25
0.32
24
0.90
63
0.64
63
0.46
95
0.41
90
0.47
40
0.45
79
0.46
39
0.46
47
0.46
43
0.46
06
1.48
71
0.21
89
2.03
65
0.17
11
0.17
51
0.16
96
0.17
80
0.16
62
0.16
82
0.16
64
0.16
49
0.20
71
0.26
37
0.37
47
0.21
07
0.90
26
0.04
49
0.04
81
0.04
69
0.08
49
0.41
00
0.44
83
0.37
09
0.43
83
0.43
40
0.43
36
45.3
710
8.75
70
2.03
65
0.90
63
0.64
63
0.48
83
0.48
77
0.47
76
0.47
61
0.47
44
0.47
22
0.46
73
0.46
34
5"
"1
o~
c) E"
O,)
m
-t.

120 Optima/placement of energy dissipation devices for 3D structures: B. Wu et al.
T a b l e 4 Optimal d imens ions and placements of VE dampers
Storey 1 2 3 4 5 6
Plane f rame locat ion Dimension
Sixth Sixth Sixth Sixth Sixth 5 standard 5 standard 4 standard 3 standard 3 standard dampers and dampers and dampers and dampers and dampers and one damper one damper one damper one damper one damper with A / t of with A / t of with A / t of with A / t of with A / t of 21 cm 15cm 41 cm 43cm 16cm
First one damper with A / t of 2.67 cm
~ 6 > =,4
i _
002 i
u- 0 q
0 2 4 6 8 10 (a) Maximum Interstory Drift (cm)
>
L _
0 2 o
" 0 1" , I , I , . . . . . I i . . . . . . .
0 1 2 3 4 (b) Max. Interstory Tor. Angle (xlf fJrad)
F i g u r e 4
6
g4 - J k .
0 2 o IJ.
0
....................... I ...................................... ,..: .......................... ! ............................. ~ ............................ i .............................
. . . . . . . . . . . . . . . . . . . . . . . . . . . . : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i . . . . . . . . . . . . . . . i . . . . . . . . . . . . . . . . . . . . . . . . . . . i . . . . . . . . . . . . . . . . . . . . . . . . . . . [ . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. ~ . . . . . . . , . . . . . . . . " . . . . . . . i "~ ' : .... - ....
0 1 2 3 4 5 6 7 (c) Max. Interstory Drift of Mass Cen.(cm)
i -A- case 3 ~ case 1 >• case 2 Q case 4 ]
Responses fo r d i f ferent damper d imens ions and locat ions
be obtained from equations (24) and (27). Now we can find the mean-square response ~ of the interstorey drift u i /by
f + ~
= Iu, l =
i = 1,2,...,I; j = 1,2,. . . ,N (39)
Since devices are placed between neighbouring floors, the mean-square values of interstorey drifts can be used as opti- mal location indices.
3.2. Sequential procedure for device placement Once the optimal location indices are found, the optimal location of the first device is determined as the floor with the maximum index value. Adding one device to that floor means an increase in stiffness and equivalent viscous dam- ping. Therefore, to find the best location of the next device, the response is recalculated accounting for the increased stiffness and damping coefficient due to the addition of the first device, and the location for the next device is then found from the newly calculated indices. This procedure is repeated until the last device has been added to the struc- ture.

Optima/placement of energy dissipation devices for 3D structures: B. Wu et al . 121
3.3. Numerical example - structure 1
The example structure discussed above is considered here as structure 1 and VE dampers are again considered here. The structural parameter values are given in Table 1, but the values of lH,j(j = 1,2,...,6) are taken to be 2m for all j. The values of ¢%, ~., and S, parameters in equation (31), and G' and G" are the same as before, with A = 120 cm 2 and t = 1.5 cm. These values correspond to a stiffness and equivalent viscous damping coefficient of k = 41.28 kN/cm and c,,q = 4.81 kN. s/cm.
The response of the uncontrolled structure is computed first, and the optimal location indices are found from the interstorey drifts (Figure 5). As indicated by the first index plot, the first damper is added to the sixth plane frame at the third floor. For the case of adding four dampers, the optimal locations for the remaining three dampers are found one by one as shown in Figure 5. Therefore, four dampers are to be placed to the sixth plane frame at the third, first,
fifth and first floors, respectively. For convenience, optimal placements for the four dampers are simply written as 3 1 5 1 (6), the digit in the parentheses being the number of the plane frame. To verify the optimality of these locations, the maximum interstorey drifts and floor dis- placements under the E1 Centro earthquake ground acceler- ation with a peak of 500 cm/s 2 are plotted in Figure 6 for four different cases of damper positionings, with case 1 cor- responding to the positions found by the proposed pro- cedure.
3.4. Numerical example - structure 2
A six-storey building with rigid floors, as shown in Figure 7, is considered here as another example. Its para- meter values are given in Table 5. The values of w e, ~ and S, and the dimensions and mechanical properties of the viscoelastic dampers are the same as before. The response of the uncontrolled structure is again computed first, and
. - , 3 0 .... 25
o,s o, s-- , : 0 , 0 : ',
1 2 3 4 5 6 1 2 3 4 5 6 Plane Frame Plane Frame
(a) (b)
25 20
5 . . . . . . . . . . . . . . .
/ . j
0 0 ', ' ', ', 1 2 3 4 5 6 1 2 3 4 5 6
Plane Frame Plane Frame
(c) (d)
I ~ Floor 1 ~ Floor 2 ~ Floor 3 ~ Floor 4 ~ Floor 5 ~ Floor 6 1
Figure5 Optimal location index plots of structure 1: (a)f irst damper; (b)second damper; (c)third damper; (d)fourth damper

122 Optimal placement of energy dissipation devices for 3D structures: B. Wu et al.
_6
.,J
m
u.
0 0
i i I i I I ! , I ~ I i
1 2 3 4 5 6 7 (a) M a x i m u m Interstory Drift (cm)
6 ~ 5
~.3 02 " 1
0
0
I i I p , i ~ i , i i i ......... , .............
5 10 15 20 25 30 35 ( b ) M a x i m u m D i s p l a c e m e n t (cm)
~ ] i original O 3 1 5 1 ( 6 ) - - ~ - 1 2 3 4 ( 1 ) )~" 1 2 3 4 ( 6 ) ]
Figure 6 Responses of structure 1 for different damper positions
4. E f f ec t o f p a r a m e t e r s o f earthquake ground motion model
In order to study the effect of the parameters of earthquake ground motion model on the optimal locations for VE dam- pers, the optimal damper location indices for structure 1 are found for different w~ and ~ values as given in Table 6. For the case of adding five dampers, their optimal place- ments are listed in Table 7. It can be seen from Table 7 that the optimal damper placements are dependent on the excitation to some degree, but in the meantime, they are not sensitive to changes in w~ and ~,.
Figure 7 Configuration of example structure 2
the optimal location indices are found from the interstorey drifts (Figure 8). For the case of adding four dampers, the optimal locations are found to be 3 1 3 1 (1). To verify the optimality of these locations, the maximum interstorey drifts and floor displacements under the E1 Centro earth- quake ground acceleration with a peak of 500 cm/s 2 are plotted in Figure 9 for four different cases of damper posi- tions, with case 1 corresponding to the positions found using the proposed procedure.
5. E f f e c t o f unsymmetrical placing of devices
In general, the dynamic response of a symmetrical structure with rigid floor can be calculated by using a plane model. But in the case that energy dissipation devices cannot be placed symmetrically due to certain limitations, the struc- ture with added devices is no longer a symmetric structure and its dynamic response should be computed using a 3D model instead of a plane model.
Structure 1 is considered here as an example again, but the eccentric distances between the geometric centres and the mass centres at different floors are changed to IH~ = ln~.2 . . . . . ln~ 6 = O, so that it can be considered as a symmetric structure. Using the procedure given above, the optimal location for the first damper is found from the inter- storey drifts to be the third floor. Because of symmetry of the original structure, the optimal location indices for dif- ferent plane frames at the same floor are equivalent, hence the first damper can be added to any plane frame at this

Optimal placement of energy dissipation devices for 3D structures: B. Wu et al.
Table 5 Parameters for example structure 2
123
Floor Mass (kg) Momen t of inert ia
Stiffness (kN/cm) kj,1 = kj.2 . . . . . k~6 (J= 1,2,3,4) kj, 1 = ki, 2 . . . . . kj, 4 ( /= 5,6)
Damping (kN • s/cm) ci,1 = c~,~ . . . . . cj,8 ( j= 1,2,3,4) c~,1 = cj,2 . . . . . ci,4 ( j = 5,6)
1 3105 173 880 421.7 2 3105 173 880 421.7 3 3105 173880 286.6 4 3105 173 880 286.6 5 1863 42 694 164.5 6 1863 42 694 164.5
2.91 2.91 1.98 1.98 1.44 1.44
IHcl = IHc2 . . . . . /Ha = 0 k~.i, Cj,, and IHcj have the same meanings as in Table 1
20
Z" Eols
v
X
"0 _ c 1 0 C 0
~ 5 0 -1
0 1 2 3 4 5 6
Plane Frame
(a)
14
. " 1 2 E U l O v
X
• o 8 C
= 6 0
4 0
2
1 2 3 4 5 6 Plane Frame
(b)
12
- " 10 E
v
x 8
_~ 6 C
._o 4 , ,I ,o
0 o 2
. J
0 1 2 3 4 5 6
Plane Frame
12
' " 10 E
v
x 8 "0
_c 6 C
._o 4
o 2 . J
I
I 2 3 4 5 6 Plane Frame
(C) (d)
F igu re 8
[ . Floor I mlm Floor 2 [ ] Floor 3 ~ Floor 4 ~ Floor 5 ~ Floor 6 1
Opt imal locat ion index plots of structure 2: (a) f irst damper ; (b) second damper ; (c) th i rd damper ; (d) fourth damper

124 Optimal placement of energy dissipation devices for 3D structures: B. Wu et al,
6 ~ 5 >4 ,.J , .3
u. 1 0
0 1 2 3 4 5 (a) Maximum Interstory Drift (cm)
.6 >4 . J
i _
0 2 o IL
0 J / f I I t ~ I I
0 5 10 15 20 25 ( b ) M a x i m u m D i s p l a c e m e n t ( c m )
I~B- O 3131 original (1)
Figure9 Responses of structure 2 for different damper posit ions
i t 234(1) >< 3.4(6)56(4)1
Table 6 Parameters of earthquake ground motion model
Parameter ~:g ~og
Case 1 0.65 10.0 12.0 18.85 20.0 25.0 30.0 Case 2 0.65 0.69 0.80 0.90 18.85
Table 7 Optimal damper locations
Case ~:~ % Locations
Case 1 0.65 10.0 3 1 5 1 3 (6) 12.0 3 1 5 1 3 (6 ) 18.85 3 1 5 1 3 (6) 20.0 3 1 5 1 3 (6 ) 25.0 3 5 1 3 1 (6) 30.0 3 5 1 3 1 (6)
Case 2 0.65 18.85 3 1 5 1 3 (6) 0.69 3 1 5 1 3(6) 0.80 3 5 1 3 1 (6) 0.90 3 5 1 3 1 (6)
floor. The maximum interstorey drifts of the structure under the El Centro earthquake ground acceleration with a peak of 500 cm/s 2 are listed in Table 8 for three different cases of the first damper position. It can be found from Table 8 that: firstly, space models must be used to compute the dynamic responses of originally symmetric structures with unsymmetrically placed energy dissipation devices; and secondly, if the devices cannot be symmetrically added to an originally symmetric structure, they should be placed at
locations that are closest to the geometric centre of the structure to reduce the torsional effect to a minimum degree.
6. Conclusions
Optimal placement procedures for energy dissipation devices in 3D structures have been developed for minimiz- ing translation-torsion coupling effects and for the case of symmetrical structures with unsymmetrically placed devices. The optimality of these procedures is supported by numerical examples. The analytical results indicate that limits exist beyond which structural performance cannot be improved significantly by adding more devices to the struc- ture.
The interstorey drifts of unsymmetrical structures, which are caused by both the interstorey translational displace- ments of the mass centres and the interstorey torsional response, are taken as the performance index to evaluate the safety of structures, showing that the placement of a limited number of devices may have a significant effect on the level of response reduction. A sequential procedure has been extended to 3D structures based on Reference 4 to

Optima/placement of energy dissipation devices for 3D structures: B. Wu et al.
Table 8 Maximum interstorey drifts
125
Structural Damper Maximum interstorey drift Location of the maximum model position (cm) interstorey drift
Space model no damper 4.52 3(1) 4.87 3(3) 4.34
Plane model no damper 4.52 3(1) 4.21 3(3) 4.21
any plane frame at the 3rd storey the 6th plane frame at the 3rd storey the 6th plane frame at the 3rd storey any plane frame at the 3rd storey any plane frame at the 3rd storey any plane frame at the 3rd storey
3(1) and 3(3) in the second column from left represent, respectively, the first damper is added to the 1st and 3rd plane frames at the 3rd storey
reduce the interstorey drifts. Optimality of these procedures has been verified through numerical examples.
The effect of parameter values in the ground motion model on optimal device locations is studied by using numerical examples. The results show that optimal place- ments are dependent on the excitation to some degree, but they are insensitive to co X and ~,~ used in the ground motion model.
Results also show that space models should be used in the optimization procedure for an originally symmetric structure with unsymmetrically placed devices in order to take the torsional effect into account. In general, devices should be added at locations that are closest to the geo- metric centre of the structure to minimize the torsional effect.
Acknowledgments This work was completed when the first two authors were visiting professors at the State University of New York at Buffalo. This research was supported in part by the National Center for Earthquake Engineering Research under grant NCEER-94-5102.
References
1 Dargush, G. F. and Soong, T. T. 'Recent structural applications of passive energy dissipation in North America', Proc. Sixth US-Japan Workshop on the Improvement of Structural Design and Construction Practices, ATC 15-5, Victoria, Canada, 1994, 25.1-25.18
2 Zhang, R. H., Soong, T. T. and Mahmoodi, P. 'Seismic response of steel frame structures with added viscoelastic dampers', Earthquake Engng Struct. Dyn. 1989, 18(3), 389-396
3 Chang, K. C., Soong, T. T., Oh, S. T. and Lai, M. L. 'Seismic behavior of steel frame with added viscoelastic dampers', ASCE J. Struct. Engng 1995, 121(10), 1418-1426
4 Zhang, R. H. and Soong, T. T. 'Seismic design of viscoelastic dampers for structural applications', J. Struct. Engng 1992, 118(5), 1375-1392
5 Ashour, S. A. and Hanson, R. D. 'Elastic response of buildings with supplemental damping', Report UMCE 87-1, Department of Civil Engineering, University of Michigan, Ann Arbor, MI, 1987
6 Xu, S. L. A collection of Fortran programs, Press of Tsinghua Univer- sity, 1992, pp. 351-359 (in Chinese)
7 Cheng, F. Y. and Pantelides, C. P. 'Optimal placement of actuators for structural control', Technical Report NCEER-88-0037, National Center for Earthquake Engineering Research, State University of New York at Buffalo, Buffalo, New York, 1988
8 Chang, M. I. J. and Soong, T. T. 'Optimal controller placement in modal control of complex systems', J. Math. Anal. Appl. 1980, 75(2), 340-358