Opportunity Mars Exploration...
76
1 Vehicles Mars Operations Reference Information Assembly, Test and Launch Opportunity Mars Exploration Rover Status
Transcript of Opportunity Mars Exploration...

1
Vehicles
Mars Operations
Reference Information
Assembly, Test and Launch
Opportunity Mars Exploration Rover
Status

2
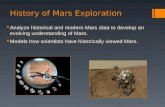
MER and Mars Pathfinder Rovers at JPL
Mars Pathfinder Sojourner Engineering
Rover Model
Spirit
Spirit and Opportunity during assembly and test at the Jet Propulsion Laboratory shown with the Mars Pathfinder engineering model rover (first to operate on Mars in July 1997).
Opportunity

3
MER Spacecraft/Rover Stack-upMER-A spacecraft atop the Delta II launch vehicle at Space Launch Complex 17-A, Cape Canaveral, FL.
MER-A Spacecraft with Spirit Rover in Aeroshell
Stage III
Stage II
Payload Fairing Half

4
MER-B/Opportunity Rover LaunchMER-B spacecraft launched by the Delta II 7925H at Pad 17-B, Cape Canaveral, FL on July 7, 2003.

5
1. The cruise stage of the MER-B spacecraft propelled the vehicle from Earth to Mars. The entry vehicle entered the Martian atmosphere and then the parachute slowed the vehicle during entry, descent, and landing. The lander is a protective shell that enclosed the rover and with the airbags protected the rover from the forces of impact. Descent was halted by retrorockets and the lander was dropped 30 ft to the surface.
2. Airbags cushioned the spacecraft during landing allowing it to bounce across the Martian surface. The airbags were inflated seconds before touchdown and deflated once safely on the surface.
1.
2.
3.
3. After the lander stopped bouncing and rolling on the surface, it came to rest on the base of the tetrahedron or one of its three sides. The sides then opened to make the base horizontal and the rover upright. The sides initially opened to an equally flat position, so all sides of the lander were straight and level. The flight team on Earth then commanded the rover to adjust the sides and create a safe path for the rover to drive off the lander and onto the Martian surface.
Entry Vehicle and Lander

6
Rover

7
First Look from Opportunity on MarsJanuary 25, 2004 - Opportunity lands halfway around Mars from Spirit rover
January 25, 2004 - This mosaic image is one of the first sent to Earth from Opportunity shortly after it landed at Meridiani Planum about 15.5 miles downrange (east) of its intended target. The image was captured by the rover's navigation camera.
Although Meridiani is a flat plain, without the rock fields seen at previous Mars landing sites, Opportunity rolled into an impact crater 72 ft in diameter and about 6 ft deep, with the rim of the crater approximately 32 ft from the rover. NASA scientists were so excited about landing in the crater that they called the landing a “hole in one;” however, they were not aiming for the crater (or even knew it existed). Later, the crater was named Eagle Crater and the landing site designated Challenger Memorial Station. The landing site was the darkest ever visited by a spacecraft on Mars. It would be two weeks before Opportunity was able to get a better look at its surroundings.

8
Evidence of Martian Water Discovered
March 26, 2004 - This image from Opportunity's panoramic camera is an approximate true-color rendering of the rock called the Berry Bowl in the Eagle Crater outcrop. The study of this “blueberry-strewn” area and the identification of hematite as the major iron-bearing element within these sphere-like grains helped scientists confirm their hypothesis that the hematite in these Martian spherules was deposited in water.
March 8, 2004 - The first outcrop rock Opportunity examined with the microscopic imager was finely-layered, buff-colored and in the process of being eroded by windblown sand. Embedded and on top of the rock, like “blueberries” in a muffin, were small spherical grains about 0.06 inches in size. The image shows the gray spheres that have weathered out of the rock and are resting in the darker soil. Through intense investigations with the spectrometers, scientists determined the blueberries are rich in the mineral hematite. On Earth, hematite often forms in the presence of liquid water. These blueberries helped scientists determine that the rocks at Eagle Crater had been soaked in water.

9
Opportunity Finds More Evidence of WaterMarch, 2004 - This image taken by the Opportunity panoramic camera shows the rock called El Capitan, just right of center, in the upper portion of the outcrop in Eagle Crater. El Capitan was a significant find because it provided clues to lead scientists to believe the entire outcrop in Eagle Crater was once covered in water.
This image shows fine, parallel lamination in the upper area of the rock, that also contains scattered sphere-shaped objects ranging from 0.04 to 0.24 inches in size. There are also more abundant, scattered vugs, or small cavities, that are shaped like discs. These are about 0.4 inches long. The rover's Miniature Thermal Emission Spectrometer uses infrared detectors to determine the mineral composition of rocks and soil. The spectrometer showed that El Capitan contains a considerable amount of sulfate. The Mössbauer Spectrometer identified the mineral jarosite, which contains water in the form of hydroxyl.

10
Evidence of a Martian Sea Found
March 23, 2004 - A magnified view of the rock Upper Dells provides evidence that Opportunity sits on the shoreline of what was once a salty sea on Mars. Rippled patterns in the rocks at Meridiani Planum suggest the land was once a salt flat, sometimes covered by shallow water and sometimes dry. Telltale patterns called crossbedding and festooning, in which some layers within a rock lie at angles to the main layers, led scientists to the conclusion that the rippled shapes formed under a current of water and not wind.

11
Eagle Crater Panorama Captured
April 14, 2004 - Opportunity surveys the dusty plain of Meridiani. This image is an approximate true-color panorama mosaic showing Eagle Crater and some of the surrounding plains of Meridiani Planum. This panorama depicts a story of exploration including the rover's landing craft, a thorough examination of the outcrop, a study of the soils at the near-side of the lander, and a successful exit from Eagle Crater.

12
First Look at Endurance Crater
May 6, 2004 - This approximate true-color mosaic taken by the Opportunity panoramic camera shows the impact crater Endurance. The crater is about 430 feet in diameter and more than 66 feet deep. Scientists were eager to explore Endurance for clues to Mar's geological history. The crater's exposed walls provided a window to what lies beneath the surface and what geologic processes occurred in the past. The challenge was getting to the scientific targets; most of the crater's rocks are embedded in vertical cliffs. The rover spent six months studying Endurance including descending into the crater and successfully climbing out.

13
July 19, 2004 - This view from the rover’s panoramic camera is a false-color composite rendering of the first seven holes that the Rock Abrasion Tool (RAT) drilled on the inner slope of Endurance Crater. The rover was about 39 feet down into the crater when it acquired the images combined into this mosaic. The view is looking back toward the rim of the crater, with the rover's tracks visible. The tailings around the 1.8 inch diameter holes drilled by the RAT show evidence of fine-grained red hematite similar to what was observed months earlier in Eagle Crater outcrop holes.
Viewers find it far easier to see the seven holes in this exaggerated color image than in true color; the same is true for scientists who are studying the holes on Earth.Starting from the uppermost pictured (closest to the crater rim) to the lowest, the rock abrasion tool hole targets are called Tennessee, Cobblehill, Virginia, London, Grindstone, Kettlestone, and Drammensfjorden.
Opportunity Views “RAT” Hole Trail
Rover Tracks
RAT Hole(7 Places)

14
November 13 to 20, 2004 - Opportunity views Burns Cliff after driving to the base of this southeastern portion of the inner wall of Endurance Crater. The wide-angle view makes the cliff walls appear to bulge out toward the camera. In reality the walls form a gently curving, continuous surface.
Scientists analyzed data from stacked sedimentary rock layers 23 feet thick that were exposed inside Endurance Crater, identifying three divisions within the stack. The lowest, oldest portion had the signature of dry sand dunes. The middle portion had an environment of windblown sheets of sand with all the particles produced in part by previous evaporation of liquid water. The upper portion corresponded to layers Opportunity had found inside a smaller crater near its landing site. Scientists found that the materials in all three divisions were wet both before and after the layers were deposited by either wind or water.
Burns Cliff Wide-Angle View

15
Opportunity Heatshield Impact Site Investigated
December 28, 2004 - This mosaic was acquired shortly after Opportunity arrived at the site where its heatshield hit the ground south of “Endurance Crater” on January 24, 2004. The heatshield was part of the aeroshell supplied by Lockheed Martin in Denver, CO.
The mosaic of images taken by the panoramic camera are approximate true-color. On the left, the main heatshield piece is inverted and reveals its metallic insulation layer, glinting in the sunlight. The main piece stands about 3.3 feet high and lies about 43 feet from the rover. The other large, flat piece of debris near the center of the image is about 46 feet away. The circular feature on the right side of the image is the crater made by the heatshield's impact. It is about 9.2 feet in diameter but only 2 to 4 inches deep. The crater is about 20 feet from Opportunity in this view. Smaller fragments and debris can be seen all around the impact site.
Aeroshell Heatshield
Aeroshell HeatshieldDebris

16
Rover Stuck at Meridiani in Sand Dune
May 6 to May 14, 2005 - This panoramic image was acquired by Opportunity on the plains of Meridiani about 1.2 miles south of Endurance Crater. The rover was stuck in the dune's deep fine sand for more than a month at a place known informally as Purgatory Dune.
Opportunity's tracks leading back to the north (center of the panorama) are a reminder of the rover's long trek from Endurance Crater. The deep ruts dug by Opportunity’s wheels as it became stuck in the sand appear in the foreground. The crest and trough of the last ripple the rover crossed before getting stuck is visible in the center. These wind-formed sand features are about 4 to 6 inches tall. The crest of the actual ripple where the rover got stuck can be seen just to the right of center. The tracks and a few other places on and near ripple crests are dustier than the undisturbed or “normal” plains soils in Meridiani. Since the time these ruts were made, some of the dust has been blown away by the wind, reaffirming the dynamic nature of the Martian environment, even in this barren, ocean-like desert of sand.

17
Opportunity on the Rim of Erebus
November 23 to December 5, 2005 - This is the Erebus Rim panorama, acquired by the Opportunity panoramic camera while exploring sand dunes and outcrop rocks in Meridiani Planum. Since the time this panorama was acquired, engineers diagnosed and tested Opportunity's robotic arm, and the panorama has been expanded to include more images of this terrain. The panorama is an approximate true-color rendering, and the largest acquired by either rover during the mission. This image provides the highest resolution view yet of the finely-layered outcrop rocks, wind ripples, and small cobbles and grains along the rim of the 984 feet wide but shallow Erebus Crater. Once the arm diagnostics and testing were completed, Opportunity started to explore other layered outcrop rocks at Erebus and eventually continued southward toward the large crater known as Victoria.

18
September 28, 2006 - Opportunity edged close to the rim of Victoria Crater for this vista. The crater has been the mission's long-term destination for the past 21 Earth months. The thick stack of geological layers, exposed in the crater walls, could reveal the record of past environmental conditions over a much greater span of time than Opportunity has previously examined.
Opportunity Arrives at Victoria Crater
October 5, 2006 - The far side of the crater is about one-half mile away. The rim of the crater is composed of alternating promontories, rocky points towering approximately 230 feet above the crater floor, and recessed alcoves. The bottom of the crater is covered by sand that has been shaped into ripples by the Martian wind.

19
October 3, 2006 - This image from the High Resolution Imaging Science Experiment (HiRISE) on the NASA Mars Reconnaissance Orbiter (MRO) shows Opportunity near the rim of Victoria Crater and wheel tracks in the Martian soil behind it.
MRO Views Opportunity at Victoria Crater
The enlarged HiRISE image reveals the rover’s shadow including the shadow of the camera mast. The range from MRO to the rover was 185.6 miles.
Opportunity arrived at the rim of the crater after a drive of more than 5 miles after landing.
Opportunity’s Shadow

20
January 3, 2007 - Opportunity captured this vista of the crater from Cape Verde, one of the promontories that are part of the scalloped rim of the crater. On the left is Cape St. Mary, the next promontory clockwise from Cape Verde. The vantage point offered a good view of the rock layers in the 50 foot tall cliff face of Cape St. Mary.
Opportunity will study rocks around the rim of Victoria and look for a site to eventually safely enter the crater.
Examination of Victoria Crater BeginsNovember 22, 2006 - Opportunity examines the promontory called “Cape Verde” from Cape St. Mary. The upper portion of the crater wall contains a jumble of material tossed outward by the impact that excavated the crater. This vertical cross-section through the blanket of ejected material surrounding the crater was exposed by erosion that expanded the crater outward from its original diameter.
Cape St. Mary

21
Opportunity Tests New Navigation Capability
May 1, 2007 - The rover’s panoramic camera took the exposures combined into this image while it was testing a new navigational capability called “Field D-Star.” This capability enables the rovers to plan optimal long-range drives around any obstacle in order to travel the most direct safe route to the drive's designated destination. Earlier, the rovers could recognize hazards when they approached them closely, then back away and try another angle, but could not always find a safe route away from hazards.
Victoria Crater is in the background, at the top of the image. The test drive began near the center of the image where the tracks overlap each other and includes the 52 ft curved tracks. The tracks farther away were left by earlier drives near the northern rim of the crater. The patch of larger rocks to the right was set as a keep-out zone. Opportunity plotted and followed a smoothly curved, efficient path around the rocks, always keeping the rover in safe areas.
Part of Test Keep-Out Zone

22
The layers seen in Cape St. Vincent have proven to be among the best examples of meter scale cross-bedding observed on Mars to date. Cross-bedding is a geological term for rock layers which are inclined relative to the horizontal and are indicative of ancient sand dune deposits.
These images have allowed scientists to determine that the rocks at Victoria Crater once represented a large dune field, not unlike the Sahara desert on Earth, and that this dune field migrated with an ancient wind flowing from the north to the south across the region. Other rover chemical and mineral measurements have shown that many of the ancient sand dunes studied in Meridiani Planum were modified by surface and subsurface liquid water long ago.
Details of Layers Cape St. Vincent
May 7, 2007 - The cliff in this image from Opportunity's panoramic camera is informally named Cape St. Vincent. It is a promontory approximately 39 feet tall on the northern rim of the crater, near the farthest point along the rover's traverse around the rim.

23
The image from the Mars Reconnaissance Orbiter (MRO) shows the rover’s path as it explored clockwise about one-fourth of the way around the rim before returning to a point close to its first overlook at Duck Bay. On July 3, 2007, Opportunity was located near Duck Bay as it prepared to descend into Victoria Crater. “Sol 951” is the 951st Martian day after landing.
Towards the end of June 2007, a series of dust storms became worse and affected the surface operations of Opportunity. Since the rover depends on solar energy for survival and the dust is partially blocking the sun, the storm was watched closely by the rover scientists and engineers. Pictures from the MRO’s Color Imager camera helped track the storm and plan rover operations. Opportunity broke its dust record, with the opacity level rising from 1.0 to 3.3 within a week. Solar array energy on the rover dropped from 765 to 402 watt-hours over the same period of time.
Dust Delays Crater Entry

24
September 13, 2007 - After finishing an in-and-out maneuver to check wheel slippage near the rim of Victoria Crater, Opportunity re-entered the crater to begin exploration of the inner slope. The rover's position was about 20 feet inside the rim in the Duck Bay alcove of the crater.
Opportunity's front hazard camera recorded this wide-angle view looking down into and across the crater at the end of the day's drive. A promontory named Cape Verde can be seen jutting out from the walls of Victoria Crater.
Rover Enters Crater and Starts Exploration
October 20, 2007 - Cape Verde can be seen in this approximate true-color picture taken by the rover’s panoramic camera. The rover took this picture more than a month after it began descending down the crater walls. The overall soft quality of the image and the “haze” seen in the lower right portion are the result of scattered light from dust on the front window of the camera.
Cape Verde

25
October 23 to December 11, 2007 - This view combines many images taken by Opportunity's panoramic camera. Some visible patterns in dark and light tones are the result of combining frames that were affected by dust on the front window of the rover's camera.
The main body of the crater appears in the upper right of this panorama, with the far side of the crater lying about half a mile away. Bracketing that part of the view are two promontories on the crater's rim at either side of Duck Bay. They are Cape Verde, 20 ft tall, on the left, and Cabo Frio, about 50 ft tall, on the right. The rest of the image, other than sky and portions of the rover, is ground within Duck Bay.
Opportunity's targets of study during the last quarter of 2007 were rock layers within a band exposed around the interior of the crater, about 20 ft from the rim. Bright rocks within the band are visible in the foreground of the panorama. The rover science team assigned informal names to three subdivisions of the band: Steno, Smith, and Lyell (lowermost).
Lyell Panorama inside Victoria CraterCabo FrioCape Verde

26
July 2 and 3, 2008 - Full-shade lighting in the late Martian afternoon helps make details visible in this view of the layered cliff face of the Cape Verde promontory. The panoramic camera took dozens of individual images that have been combined into this mosaic. The rover drove close to the base of the cliff that is part of the crater rim to capture detailed images of a stack of layers 20 ft tall. The information Opportunity has returned about the layers in Victoria Crater suggests the sediments were deposited by wind and then altered by groundwater. Having completed its job in the crater, engineers are programming Opportunity to climb out of the crater at the same place it entered. The crater is deeper than any other seen by the rover.
The rover now drives with its robotic arm out of the stowed position. A shoulder motor has degraded over the years to the point where the rover team chose not to risk having it stop working while the arm is stowed on a hook. If the motor were to stop working with the arm unstowed, the arm would remain usable.
Dusk Lighting of Cape Verde Layered Textures

27
After ascending past the top of the inner slope of the crater, the rover also got through a sand ripple where the tracks appear deepest.
The rover laid down the first tracks at this entry and exit point after about a year of exploring around the outside of crater looking for the best access route to the interior. While inside, the rover spent several months using the contact instruments on its robotic arm to analyze the composition of the rock layers it could drive across on the surface of the upper slope. Then Opportunity drove close to the base of the Cape Verde promontory that forms part of the crater rim and appears in the upper center of this image. From that perspective, the rover used its panoramic camera to examine details of the layering of the 20 ft tall cliff.
Opportunity Ascends to Level Ground
August 28, 2008 - The rover's navigation camera captured this view looking back into the Victoria Crater just after finishing a 22 ft drive that brought Opportunity out onto level ground. For scale, the distance between the parallel tracks left by the rover's wheels is about 39 inches from the middle of one track to the middle of the other.

28
Endeavour Crater is 13.7 miles in diameter and about 1,000 ft deep exposing a much thicker stack of rock layers than those examined in Victoria. Driving to Endeavour Crater is expected to take the rover to exposures of younger rock layers than it has previously seen and provide access to rocks on the plain that were thrown long distances by impacts that excavated even deeper, more distant craters.
The rover team emphasizes that Opportunity may never reach the crater. Opportunity has already operated more than 18 times longer than originally planned, and the distance to the big crater is about 7 miles matching the total distance the rover has driven since landing in early 2004.
Opportunity to Drive Toward Bigger Crater
The Opportunity team has chosen to drive toward a crater 20 times the size of Victoria Crater named Endeavour. The crater dominates this orbital view from the Thermal Emission Imaging System camera on the Mars Odyssey orbiter. The much smaller Victoria Crater is the most prominent crater in the upper left corner of the image.
Victoria Crater
Endeavour Crater

29
October 22, 2008 - This mosaic of frames from the navigation camera on Opportunity gives a view to the northeast from the rover's position. The rover had driven 436 ft on this Martian day crossing sand ripples up to about 4 inches tall. The tracks visible in the center of the image are in the east-northeast direction.
Since climbing out of Victoria Crater, the rover has driven more than a mile of its route toward Endeavour Crater and stopped to inspect the first of several loose rocks the team plans to examine along the way. High-resolution images from the Mars Reconnaissance Orbiter are helping the team plot routes around potential sand traps that were not previously discernable from orbit.
View from Southwest of Victoria Crater

30
Opportunity at Martian Cook Islands
March 12, 2009 - The rover used its navigation camera to take the images combined into this full-circle view of the it's surroundings. North is at the center, and south is at both ends. The terrain in this portion of the Meridiani Planum region includes dark-toned sand ripples and lighter-toned bedrock. The outcrop exposure that includes Cook Islands is in the lower right and left corners of the image. In the upper right, southeast from the rover's position, is a very small crater called Resolution.
The rover had driven 1.5 ft earlier on March 12 to fine-tune its location for placing its robotic arm onto an exposed patch of outcrop including a target area informally called Cook Islands. On the preceding Martian day, Opportunity turned around to drive frontwards and then drove 15 ft toward this outcrop. The tracks from the preceding day’s drive are visible in the center foreground of this view. For scale, the distance between the parallel wheel tracks is about 39 inches. The rover had previously been driving backward as a strategy to redistribute lubrication in a wheel drawing more electrical current than usual.
Resolution Crater

31
July 28, 2009 - This image was taken with the front hazard-identification camera. The team spotted this odd-shaped, dark rock, about 2 ft across, on July 18, 2009 while the rover was driving in the opposite direction and called it Block Island. The rover then backtracked some 820 ft to study it.
Analysis of Block Island's composition using the rover's alpha particle X-ray spectrometer confirmed that it is a meteorite rich in iron and nickel. It is the largest meteorite found on Mars.
Block Island Meteorite is Largest Found
July 30, 2009 - This is a false-color, red-green-blue composite view generated from images taken by the panoramic camera.
Scientists calculate it is too massive to have hit the ground without disintegrating unless Mars had a much thicker atmosphere than it has now when the rock fell; atmosphere slows the descent of meteorites. A triangular pattern was found in the texture of this iron-nickel meteorite, that is called the “Widmanstatten” pattern, indicating it was formed more than 4.5 billion years ago as the metal cooled.

32
November 5, 2009 - Opportunity took this picture of a rock informally named Marquette Island using its navigation camera. The dark-toned rock stood out so prominently in more distant views on earlier Martian days that the rover team referred to it as “Sore Thumb” before assigning the Marquette name in accord with an informal naming convention of choosing island names for the isolated rocks that the rover was finding as it crossed a relatively barren plain on its long trek from Victoria Crater toward Endeavour Crater.
Marquette Island Investigated
January 6, 2010 - This approximately true-color image of Marquette Island was taken by the panoramic camera. On the preceding day, the rock abrasion tool brushed dust out of the circular area where the tool had ground into the rock on December 20 and 23, 2009. The dark circle left by the rock abrasion tool is approximately 2 inches in diameter. The rover examined the rock from mid-November 2009 until mid-January 2010. Studies of texture and composition suggest that the rock, not much bigger than a basketball, originated deep inside the Martian crust. A crater-digging impact could have excavated the rock and thrown it a long distance to where Opportunity found it.
MarquetteIsland

33
March 4, 2010 - Opportunity took this image using its navigation camera in preparation for the first autonomous selection of an observation target by a spacecraft on Mars. Using newly developed and uploaded software named Autonomous Exploration for Gathering Increased Science (AEGIS), the rover analyzed the image to identify the feature that best matched criteria given for selecting a target. The top target that Opportunity selected with AEGIS is shown. AEGIS was directed to look for rocks that were larger and darker in color. The rover then used the software to take more detailed observations of the selected target using its panoramic camera.
First Image from a Rover Choosing a Target
March 4, 2010 - This image was taken by the rover’s panoramic camera. Opportunity used the AEGIS software to choose a target from a wider-angle navigation camera image and pointed its panoramic camera to observe the chosen target through 13 different filters. The imaging was part of a checkout of AEGIS. Images taken through three of the filters are combined into this approximately true-color view of the rock, which is about the size of a football. The rock in the target is close to a young crater called Concepcion and might have been thrown outward by the impact that excavated the crater.
Top Target
Top Target

34
Endeavour Crater Seen in More Detail
Cape TribulationCape Byron
Iazu Ejecta Point Hicks
Cape Dromedary
May 12, 2010 - The rover used its panoramic camera to take multiple exposures of the horizon toward the southeast. These images were combined into this view showing details of a portion of the rim of Endeavour about 8 miles away, plus more-distant features. Above the dark plains in the lower portion of the view, the horizon in the left half is mostly a portion of Endeavour's western rim. Labels identify some points on the rim that have been assigned informal names by the rover science team, using as a theme names of places visited by British Royal Navy Captain James Cook in his 1769-1771 Pacific voyage in command of H.M.S. Endeavour. The paler-looking terrain on the horizon beyond Endeavour in the right half of the image is part of a thick deposit of material ejected by the impact that excavated Iazu Crater, south of Endeavour.
The Compact Reconnaissance Imaging Spectrometer on the Mars Reconnaissance Orbiter (MRO) observed clay minerals exposed at Endeavour. Clay minerals, which form under wet and relatively neutral pH conditions are more suitable for life, have been found extensively on Mars from orbit but have not been examined on the surface. The rovers have previously studied rocks that were once immersed in acidic, salty water. Additional observations with the MRO spectrometer are helping the rover team choose which part of Endeavour's rim to visit first with Opportunity.

35
First Dust Devil Seen by Opportunity
July 15, 2010 - This is the first dust devil that NASA's Mars Exploration Rover Opportunity has observed in the rover's six-and-a-half years on Mars. The whirlwind appeared in a routine drive-direction image taken by the panoramic camera after a drive during the 2,301st Martian day on Mars. Contrast has been stretched, and the image has been carefully calibrated to make the dust devil easier to see against the Martian sky.
Opportunity's twin, Spirit, has observed dozens of dust devils at its location in Gusev Crater halfway around Mars from Opportunity's location in the Meridian Planum region. Opportunity conducted systematic searches for dust devils in past years without seeing any. A rougher and dustier surface at Gusev makes dust devils form more readily there than at Meridiani.
Dust Devil

36
Opportunity Arrives at Endeavour Crater
August 6, 2011 - This view combines exposures taken by the rover’s panoramic camera on the 2,678th Martian day. The subsequent day’s drive covered 246 ft, more than half of the remaining distance to the rim of the crater. Opportunity arrived at the rim during its next drive on August 9, 2011. This natural color is the best estimate of what the scene would look by the rover’s team.
The closest of the distant ridges visible along the Endeavour Crater rim is informally named Solander Point. The rover may investigate that area in the future. The rover’s first destination on the rim, called Spirit Point in tribute to Opportunity”s now-inactive twin, Spirit, is to the left (north) of this scene. The lighter-toned rocks closer to the rover in this view are similar to the rocks Opportunity has driven over for most of the mission. However, the darker-toned and rougher rocks just beyond that might be a different type for the rover to investigate. Endeavour offers access to older geological deposits than any Opportunity has seen before.
Solander Point

37
Rover Finds Mineral Vein Deposited by Water
November 7, 2011 - This color view of Homestake comes from the panoramic camera. The vein likely formed from mineral rich water moving through a crack in the rock. It could have been produced in conditions more neutral than the harshly acidic conditions indicated by the other sulfate deposits; hence this environment may have been more hospitable for a large variety of living organisms.
Homestake
October 30, 2011 - The navigation camera recorded this view near the edge of the Cape York segment of the western rim of Endeavour Crater. A bright vein, informally named Homestake, is visible on the right side of the image. The vein is about as wide as a thumb and about 18 inches long.
Opportunity examined the vein and found it rich in calcium and sulfur, possibly calcium-sulfate mineral gypsum. Observations reveal this vein and others like it, within an apron, surround a segment of the crater rim. None like it were seen in the 20 miles of crater-pocked plains that Opportunity explored for 90 months before it reached Endeavour, nor in the higher ground of the rim.

38
Site of Opportunity's Fifth Martian Winter
December 2, 2011 - This mosaic was acquired by Opportunity's panoramic camera near the northern tip of the Cape York segment of the western rim of Endeavour Crater. It shows a north-facing outcrop, informally named Greeley Haven, where the rover worked during it's fifth Martian winter. The rover team chose this designation as a tribute to the influential planetary geologist Ronald Greeley (1939-2011).
The site is of interest not only for its geologic features but because it has favorable northerly slopes to optimize Opportunity's solar energy as winter approached in the southern hemisphere of Mars. After this mosaic was acquired, Opportunity backed up the slope to park at approximately 16 degrees northerly tilt. The rover had driven more than 21.4 miles. Research activities while at Greeley Haven included a radio-science investigation of the interior of Mars, inspections of mineral compositions and textures on the outcrop, and monitoring of wind-caused changes on scales from dunes to individual soil particles.

39
Rover Captures Late Afternoon ShadowsMarch 9, 2012 - Opportunity catches its own late-afternoon shadow in this view looking eastward across Endeavour Crater. At that time, the rover was spending low-solar-energy weeks of the Martian winter at the Greeley Haven outcrop on the Cape York segment of Endeavour's western rim. It has been studying the western rim of the crater since arriving there in August 2011. The interior basin of Endeavour is in the upper half of this view.
Opportunity used the panoramic camera between about 4:30 and 5:00 p.m. local Mars time to record images taken through different filters and combined into this mosaic view. The view is presented in false color to make some differences between materials easier to see, such as the dark sandy ripples and dunes on the crater's distant floor.

40
View from Fifth Martian Winter’s Location
This full-circle scene combines 817 images taken by the panoramic camera between December 21, 2011 and May 8, 2012. It is in false color to emphasize differences between materials in the scene and shows the terrain that surrounded the rover while it was stationary for four months during its fifth Martian winter. Bright wind-blown deposits on the left are banked up against the Greeley Haven outcrop. Opportunity's tracks can be seen extending from the south, with a turn-in-place and other maneuvers evident from activities to position the rover. The tracks in some locations have exposed darker underlying soils by disturbing a thin, bright dust cover. The interior of the 14 mile diameter Endeavour Crater can be seen just below the horizon in the right half of the scene, to the northeast and east of Cape York.
During the four months at Greeley Haven, activities included radio-science observations to better understand Martian spin axis dynamics and thus interior structure, investigations of the composition and textures of an outcrop exposing an impact-jumbled rock formation on the crater rim, monitoring the atmosphere and surface for changes, and acquisition of this full-color mosaic of the surroundings.

41
Rover Reveals Geological Mystery
Small spherical objects at Matijevic Hill fill the field in this mosaic (left) combining four images from the microscopic imager on August 29, 2012. The rover was investigating an outcrop called Kirkwood in Cape York. The spheres measured as much as one-eighth of an inch in diameter. Preliminary analysis indicated that these spheres did not have the high iron content of the Martian “blueberries” found at its landing site. The spheres' composition was determined using the Alpha Particle X-Ray Spectrometer. Mission scientist have multiple working hypotheses, and no favorite hypothesis at this time.
Rock fins up to about 1 ft tall dominated this scene from the panoramic camera. The component images were taken on August 23, 2012. The view spans an area of terrain about 30 ft wide. It is presented in approximate true color, the camera team's best estimate of what the scene would look like if humans were there and able to see it with their own eyes.
Orbital investigation of the area identified a possibility of clay minerals in this area of the Cape York segment of the western rim of Endeavour Crater. This outcrop is within an area informally named “Matijevic Hill."

42
Opportunity Examines Clay Clues in RockThe pale rock in the upper center of this image, about the size of a human forearm, includes a target called “Esperance” which was inspected by the rover's alpha particle X-ray spectrometer (APXS). The robotic arm can be seen in the lower left corner. APXS indicated that Esperance's composition is higher in aluminum and silica, and lower in calcium and iron, than other rocks Opportunity has examined in more than nine years on Mars. Scientists have hypothesized that it dates back to the Noachian Period (Martian geologic system) some 3.7 to 4.2 billion years ago.
The image is a composite of three exposures taken by the panoramic camera on March 28, 2013. The view is presented in false color to make some differences between materials easier to see.
The rover team identified Esperance while exploring a portion of Cape York where the Mars Reconnaissance Orbiter (MRO) had detected a clay mineral. Clays typically form in wet environments that are not harshly acidic. Intense alteration of Esperance along fractures provided conduits for fluid flow. There was enough water, not only for reactions that produced clay minerals but also enough to flush out ions set loose by those reactions, so that Opportunity could clearly see the alteration. Water that moved through fractures during the history of Esperance would have provided more favorable conditions for biology than any other wet environment recorded in rocks that Opportunity has observed.

43
Sky Gets Dustier Between Five Martian Days
The two images, taken five Martian days apart by the front hazard-avoidance camera, document the sky, above the rover’s location, becoming more dusty. The location of the rover when these images were taken was at the Cape York segment of the western rim of Endeavour Crater.
The image on the left was taken on May 2, 2013; the one on the right was taken on May 7, 2013 with the rover at the same location but its arm in a different position. In between the dates, local-scale dust storm activity west of Opportunity’s location had reduced the clarity of the sky. Effects can be seen in the image on the right; the softened shadow of the rover and the obscured horizon on the right.

44
Rover Moves Toward Solander Point
Opportunity used its panoramic camera on June 11, 2013 to record this view of the rise in the foreground called "Nobby’s Head." The rover drove around the north and west sides of Nobby’s Head during a multi-week southward drive between two raised segments of the west rim of Endeavour Crater. This view is centered toward the south-southeast, with Opportunity's next destination, "Solander Point," toward the right edge of the view.
Nobbys Head is about a third of the way from the rim segment where Opportunity worked for most of the past two years, Cape York, to Solander Point. The map of this section of the rim of Endeavour Crater, as well as the rover’s path, is shown to the left. The rover began a trek of approximately 1.2 miles from part of Cape York to Solander Point in late May 2013. The base image is from a camera on the MRO.
North
Solander Point
Cape York
Nobby’sHead

45
Closing in on Solander Point
June 24, 2013 - Solander Point is shown in the center and Endurance Crater is to the far left. Botany Bay is in the foreground. The view combines two images taken by the rover’s panoramic camera. The surface that Opportunity is driving across in Botany Bay is a fractured outcrop of polygon-shapes that is remarkably good for driving. The plates of outcrop, like a tiled mosaic pavement, have a thin covering of soil, not enough to form the wind-blown ripples the rover has had to deal with during some other long treks. The outcrop plates are light-toned, and the cracks between them are filled with dark, basaltic soil and “blueberries.”
Opportunity departed the southern tip of the "Cape York" segment about seven weeks before June 24, 2013 and headed south for Solander Point. Both areas are raised portions of the western rim of the 14 mile-wide Endeavour Crater offering access to older geological deposits -more than the rover visited during its first seven years on Mars. The destination provides a tall cross section of rock layers for examination and also an expanse of terrain that includes a north-facing slope, which is favorable for the solar-powered rover to stay active and mobile through the coming Martian southern-hemisphere winter. Opportunity had exceeded 23 miles of total odometer distance with a 318 ft drive prior to taking this image on June 24.

46
Dusty Rover Cleaned by Wind
March 22 to 24, 2014 - This self-portrait of Opportunity (right) shows the effects of wind events that cleaned much of the accumulated dust off of the solar panels. With the cleaner arrays and lengthening winter days, the rover’s solar arrays were generating more than 620 watt-hours per day in mid-April 2014 compared to less than 375 watt-hours per day in January 2014.
The mosaic combines multiple frames taken by the panoramic camera through three different color filters. This image is in approximately true color.
January 3 to 6, 2014 - This mosaic of images (left) taken by Opportunity's panoramic camera shows the amount of dust accumulated on its solar panels. The downward-looking view omits the mast on which the Pancam is mounted; however, its shadow is shown.
The rover recorded the component images for this self-portrait about three weeks before completing a decade of work on Mars.

47
Endeavour Crater from Western Rim
April 18, 2014 - This vista of the Endeavour Crater rim was acquired by Opportunity from the southern end of “Murray Ridge” on the western rim of the crater. The view extends from the east-southeast on the left to southward on the right. It encompasses the far rim of Endeavour Crater on the left and the crater’s western rim on the right.
The small impact crater visible on the left in the distance on the slopes of the far rim is about 740 ft in diameter and it is 13 miles away. The high peak in the distance on the right is “Cape Tribulation” and it is about 1.2 miles to the south of the rover. The rim curves off to the left from Cape Tribulation in a series of peaks towards the far southern crater rim. The floor of Endeavour crater is filled with dark sand, brighter dust, and, in the distance, dusty haze. Outcrops here on the western rim are crater ejecta covered in the foreground by dark sand ripples. On May 13, 2014, Opportunity approached the dark outcrops about halfway down on the right side of the image.
The image combines several exposures taken by the rover’s panoramic camera. The view merges exposures taken through three of the camera’s color filters. It is presented in approximately true color.

48
Opportunity Views Passing CometOctober 19, 2014 - Researchers used the rover’s panoramic camera to capture this 10 second exposure view of comet C/2013 A1 (Siding Spring) as it passed near Mars. The image was taken about two-and-a-half hours before the closest approach of the comet’s nucleus to Mars.
The comet, some nearby stars, and some effects of cosmic rays hitting the camera's light detector are labeled.
The sky was still relatively dark, before Martian dawn. At the time of closest approach, the morning sky was too bright for observation of the comet.
A Martian dust storm to the west of Opportunity hampered visibility somewhat on October 19 compared to the sky over Opportunity a week earlier. The image has been processed by removal of detector artifacts and slight twilight glow. The duration of the exposure resulted in a 2.5-pixel smear from the rotation of Mars.
C/2013 A1 (Siding Spring) is an Oort cloud comet (distance of up to about 100,000 astronomical units from the sun) discovered on January 3, 2013 by Robert H. McNaught at Siding Spring Observatory, Australia.
Revise Image adding labels to original image
Stars Comet C/2013A1(Siding Spring)
Omicron CetiAlpha Pisces
CosmicRays

49
Cape Tribulation Summit Achieved
January 2015 - This view is from the top of the “Cape Tribulation” segment of the rim of Endeavour Crater. This location is the highest elevation Opportunity has reached since departing the Victoria Crater area in 2008 on a three-year, down-slope journey to Endeavour Crater. Endeavour is shown with its interior and rim laid out in this 245 degree panorama centered toward east-northeast. The left edge is toward west-northwest and the right edge is southward. Rover tracks imprinted during the rover’s approach to the site appear on the left. The robotic arm is in the right foreground displaying the United States flag. The far horizon in the right half of the scene includes portions of the rim of a crater farther to the south, named “Iazu Crater.”
The rover climbed about 440 ft in elevation from a lower section of the Endeavour rim, named “Botany Bay,” that it crossed in mid-2013 in its drive to the Tribulation summit. It departed the summit on January 17, 2015 continuing toward a science destination at “Marathon Valley.”
The image is in approximate true color combing exposures taken through three of the panoramic camera’s color filters.

50
Spirit of St. Louis Crater with Rock Spire
March 29 and 30, 2015 - An elongated crater called “Spirit of Saint Louis” is shown with a rock spire at the center of the image. The component images of this mosaic view were taken by the panoramic camera. The view is centered toward the northeast. The crater lies on the outer portion of the western rim of the 14 mile diameter Endeavour Crater near the entrance to Marathon Valley. Opportunity has been exploring Endeavour’s western rim for about one-third of the rover's mission. The elevated western rim extends northward to the left from Spirit of St. Louis Crater in this scene. A glimpse of the far side of Endeavour is visible on either side of the rock spire.
Spirit of St. Louis Crater is about 110 ft long and about 80 ft wide with a floor slightly darker than the surrounding terrain. The rocky feature toward the far end of the crater is about 7 to 10 ft tall rising higher than its rim.

51
Rover Approaches Marathon Valley
March 3 and 4, 2015 - This view is centered toward the east-southeast, from a location on Endeavour Crater's western rim overlooking Marathon Valley, with the floor of Endeavour beyond, and its eastern rim in the distance. Opportunity's robotic arm is in the center foreground, positioned for examination of a blocky rock called “Sergeant Charles Floyd.”
Marathon Valley is near where Opportunity is expected to surpass marathon distance. Olympic marathon distance is 26.219 miles.
The rover team selected Marathon Valley as a science destination because observations of this location using the Compact Reconnaissance Imaging Spectrometer for Mars instrument on the Mars Reconnaissance Orbiter yielded evidence of clay minerals, a clue to ancient wet environments.

52
The map shows the southward path driven by Opportunity until it passed marathon distance on March 24, 2015, during its 3,968th Martian day on Mars. Olympic marathon distance is 26.219 miles or 42.195 kilometers. Recent drives bring the vehicle close to the science destination Marathon Valley on the west rim of Endeavour Crater. The rover team is using instruments on Opportunity to study “Spirit of St. Louis Crater” before entering Marathon Valley.
The rover’s traverse (the blue line) has been mapped onto an image from the High Resolution Imaging Science Experiment camera on the Mars Reconnaissance Orbiter.
Opportunity Surpasses Marathon DistanceNorth

53
August 14, 2015 - This scene shows contrasting textures and colors of “Hinners Point,” at the northern edge of “Marathon Valley,” and swirling reddish zones on the valley floor to the left. Marathon Valley cuts generally east-west through the western rim of Endeavour Crater. The view combines frames taken by the panoramic camera and it is shown in enhanced color to make differences in surface materials more easily visible. Dark rocks on Hinners Point show a pattern dipping downward toward the interior of Endeavour, to the right from this viewing angle. The strong dip may have resulted from the violence of the impact event that excavated the crater.Brighter rocks make up the valley floor.
Marathon Valley was a high-priority destination for the mission because the Compact Reconnaissance Imaging Spectrometer for Mars, onboard the Mars Reconnaissance Orbiter, detected exposures of clay minerals here six Earth years ago. The team scientists came looking for signs of past water and Martian mysteries. Instead, the scientists found that the residue of ancient iron magnesium clays spread all over the valley, in and around the breccia bedrock that was hurled up and formed at the time the impact created Endeavour some billions of years ago. Opportunity has been driving on, through, and around the breccia for almost the entire mission.
Hinners Point Enhanced Color Panorama

54
Marathon Valley Enhanced Color View
“Marathon Valley” opens northeastward to a view across the floor of Endeavour Crater in this scene from the panoramic camera. The scene is presented in enhanced color to make differences in surface materials more easily visible. The panorama merges multiple exposures taken during the period April 16 through May 15, 2016. It spans from north, at the left, to west-southwest, at the right. The high point in the right half of the scene is “Knudsen Ridge,” which forms part of the southern edge of Marathon Valley. Portions of the northeastern and eastern rim of Endeavour crater appear on the distant horizon. Endeavour Crater is 14 miles in diameter. The fractured texture of Marathon Valley's floor is visible in the foreground.
Opportunity entered Marathon Valley in July 2015. The team’s planned investigations in the valley were nearing completion when the component images were taken. The rover team calls this image the mission’s “Sacagawea Panorama,” for the Lemhi Shoshone woman, whose assistance to the Lewis and Clark expedition helped enable its successes. Many rocks and other features in Marathon Valley were informally named for members of the 1804-1806 “Corps of Discovery” expedition.

55
Wharton Ridge Enhanced Color View
Before the rover departed “Marathon Valley,” its panoramic camera acquired the component images for this scene of “Wharton Ridge”on August 30, 2016. Wharton Ridge forms part of the southern wall of Marathon Valley on the western rim of Endeavour Crater. In this scene, the landscape is presented in enhanced color to make differences in surface materials more easily visible. The view spans from east-northeast at left to southeast at right. The full extent of Wharton Ridge is visible, with the floor of Endeavour Crater beyond it and the far wall of the crater in the distant background. Near the right edge of the scene is “Lewis and Clark Gap,” through which Opportunity crossed from Marathon Valley to “Bitterroot Valley” in September 2016.
Opportunity's science team chose the ridge’s name to honor the memory of Robert A. Wharton (1951-2012), an astrobiologist who was a pioneer in the use of terrestrial analog environments, particularly in Antarctica, to study scientific problems connected to the habitability of Mars.

56
Rocheport Ridge Panorama
February 25, 2017 - “Rocheport” ridge on the western rim of Endeavour Crater spans this mosaic of images from the panoramic camera. The landscape is in enhanced color to make differences in surface materials more easily visible. The view extends from south-southeast on the left to north on the right. This ridge bears some grooves on its side, such as between the two dark shoulders angling down near the left edge of the scene. The shoulders are about 10 to 16 ft long. The grooves might have been carved long ago by water or ice or wind.
Opportunity began exploring the western rim of Endeavour Crater in 2011 and reached the north end of Cape Tribulation in 2014. Rocheport is near the southern end of an Endeavour rim segment called “Cape Tribulation.” Opportunity is departing Cape Tribulation, an area it has explored since late 2014, southbound for its next destination, “Perseverance Valley.”
The Rocheport name comes from a riverbank town in Missouri along the route of Lewis and Clark’s “Corps of Discovery” Expedition. On June 7, 1804, their journey lead them to the convergence of the Missouri River and Moniteau Creek near the future settlement of Rocheport.

57
Rover Reaches Perseverance Valley
April 21, 2017 - Opportunity has arrived at the top of “Perseverance Valley” on the rim of Endeavour Crater. The start of Perseverance Valley is indicated by the left arrow and the center arrow points to an old and subdued crater. The right arrow marks a bright outcrop of rock for the rover to investigate.
Since Opportunity started to investigate the western rim of Endeavour Crater in August 2011, it has been time-traveling through the Martian geologic past. The vehicle found the mission’s first surface evidence of ancient Mars at Cape York on Matijevic Hill in 2012-13. Discoveries included the oldest strata found to date and the Martian ground when the impact that created Endeavour Crater hit the surface (Matijevic Formation). From the images taken by the High Resolution Imaging Science Experiment camera onboard the Mars Reconnaissance Orbiter, the rover scientists believe this ancient gully, Perseverance Valley, may also have a great story to tell.

58
Status - As of Early May 2017
The yellow line on the left image shows Opportunity’s route from the landing site inside Eagle Crater, in the upper left, to a location north of Cape Tribulation after the Sol 3735 drive (March 27, 2014). The right image shows the rover’s route, as a yellow line, from north of Cape Tribulation to the top of “Perseverance Valley” after the Sol 4720 drive (May 4, 2017). As of Sol 4725 (May 9, 2017), the total odometry is 27.80 miles. The base images are taken by the Mars Reconnaissance Orbiter’s Context Camera (left) and the High Resolution Imaging Science Experiment camera (right). Current status: http://marsrovers.jpl.nasa.gov/mission/status.html
Perseverance ValleySol 4720
Cape Tribulation
328 feet
N
3.1 miles
EagleCrater
Marathon Valley
Cape TribulationEndeavour Crater
Endurance Crater
Victoria Crater
Lunokhod Crater
N

59
Reference Information EndImages:
Courtesy of NASA, Jet Propulsion Laboratory, California Institute of Technology, Cornell University, University of Arizona, Ohio State University, Arizona State University, Texas A and M University, Malin Space Science Systems, New Mexico Museum of Natural History and Sciences
Text:Roving Mars, Steven W. Squyres, Hyperion, New York, NY, 2005 - the principal investigator describes the development and mission of the Spirit and Opportunity rovershttp://en.wikipedia.org/http://marsrovers.jpl.nasa.gov/http://marsrover.nasa.gov/http://www.space.com/http://photojournal.jpl.nasa.gov/http://www.planetary.org/http://www.nasa.gov/http://www.jpl.nasa.gov/http://mars.nasa.gov/https://mars.jpl.nasa.gov/http://redplanet.asu.edu/http://spaceflightnow.com/http://marsrovers.nasa.gov/http://ml.jpl.nasa.gov/http://www-robotics.jpl.nasa.gov/

60

61

62
MER Stack-up - Page 1 of 2 Boeing Delta II was selected for the MER missions because it had the right liftoff capability for the weight requirements and it is extremely reliable. MER-A with the Spirit rover used a standard Delta II 7925. MER-B with the Opportunity rover used a Delta II 7925H (H for “Heavy”) because it needed more energy since Earth was further from Mars when it was launched. Delta II family of launch vehicles had been in service for over 10 years and had successfully launched 90 projects including the last five NASA missions to Mars: Mars Global Surveyor in 1996 Mars Pathfinder in 1996 Mars Climate Orbiter in 1998 Mars Polar Lander in 1999 Mars Odyssey in 2001 Launch Vehicle elements: Stage I - fuel and oxygen tanks that feed an engine for ascent. Solid Rocket Motors - six strap-on, solid-fuel boosters are ignited at liftoff to increase thrust and three boosters are used after a minute into the flight. MER-B was launched using a Delta II 7925H with larger solid rocket motors than the MER-A. Payload Fairing - thin metal shroud or nose cone to protect the spacecraft during the ascent through Earth's atmosphere. Stage II - fuel and oxidizer and the vehicle's “brains” fire twice, once to insert the vehicle-spacecraft stack into low Earth orbit and then again to orient the third stage prior to it firing. Stage III - solid rocket motor provides the majority of the velocity change needed to leave Earth orbit and inject the spacecraft on a trajectory to Mars; connected to the spacecraft until done firing, then separates.

63
Launch Vehicle Complex 17 (SLC-17) MER spacecrafts launched from SLC-17 (pronounced “slick”) pads A and B at Cape Canaveral Air Force Station, FL. Initial construction of SLC-17 began in April 1956 and supported its first launch in January 1957. SLC-17 was modified to support the first Delta II launch on February 14, 1989. MER spacecraft is separate from the launch vehicle. It is the protective “spaceship” that enables the precise cargo (the rover) to travel between Earth and Mars once the launch vehicle has projected it outside of Earth´s atmosphere and gravity pull. Spacecraft includes the mechanical units that safely carry and maneuver the rover as it enters the Martian atmosphere and lands on Mars. Once on the surface, it lowers a ramp to let the rover drive off. The MER spacecraft consists of: Cruise Stage - configuration for travel between Earth & Mars. Entry, Descent, & Landing System - configuration for entry into the Martian atmosphere. Includes the aeroshell (the heatshield and backshell), the parachute, the airbags, and a lander structure. Rover - six wheeled vehicle, the size of a golf cart, with science instruments for discoveries on the Martian surface.
MER Stack-up - Page 2 of 2

64
Rover - Page 1 of 2 MER spacecraft surface operations: After the MER spacecraft entered and descended through the Martian atmosphere, the airbag-protected lander settled onto the surface and opened. The rover drove off the landing craft. Images were taken to give scientists information to select promising geological targets. Primary rover science instruments: Panoramic Camera (Pancam) - determines the mineralogy, texture, and structure of the local terrain. Navigation Camera (Navcam) - a stereo pair of cameras used to support ground navigation planning by scientists and engineers. These cameras work in cooperation with the Hazcams by providing a complementary view of the terrain. Hazard Avoidance Cameras (Hazcams) - two black-and-white cameras used to capture three-dimensional imagery to safeguard against the rover getting lost or inadvertently colliding into unexpected obstacles. Miniature Thermal Emission Spectrometer (Mini-TES) - identifies promising rocks and soils for closer examination and for determining the processes that formed Martian rocks. Alpha Particle X-Ray Spectrometer (APXS) - used for close-up analysis of the abundances of elements that make up rocks and soils. Mössbauer Spectrometer (MB) - used for close-up investigations of the mineralogy of iron-bearing rocks and soils. Microscopic Imager (MI) - obtains close-up, high-resolution images of rocks and soils.

65
Rover - Page 2 of 2Primary rover science instruments (Continued): Rock Abrasion Tool (RAT) - removes dusty and weathered rock surfaces and exposes fresh material for examination by instruments onboard. Magnets - collects magnetic dust particles. The MB and the AXPS analyze the particles collected and help determine the ratio of magnetic particles to non-magnetic particles. They also analyze the composition of magnetic minerals in airborne dust and rocks that have been ground by the RAT. Instrument Deployment Device (IDD) - robotic arm with the APXS, MB, MI and RAT located on the end.

66
Opportunity Timeline - Page 1 of 7 July 7, 2003 - MER-B with Opportunity launched from Cape Canaveral, FL. Jan. 25, 2004 - Opportunity landed in Eagle Crater at Meridiani Planum. Meridiani Planum, located on the opposite side of Mars from Spirit, is where mineral deposits (hematite) suggest Mars had a wet past. March 23, 2004 - NASA news conference announced “major discoveries” in the search for hints of past liquid water on the Martian surface. A delegation of the MER science team showed pictures and data revealing a stratification pattern and cross bedding within the rocks in the outcrop inside Eagle Crater suggesting a history of flowing water in the region. The irregular distribution of chlorine and bromine also suggests the rover was in a place that once had been the shoreline of a salty sea, now evaporated. April 30, 2004 - Opportunity arrived at Endurance Crater. June 4, 2004 - NASA announced Opportunity will descend into Endurance Crater. Potential science value gained by sending the rover into the crater outweighed the risk of not being able to get the rover back. June 8, 2004 - Opportunity drove into Endurance Crater. Opportunity moves forward enough to just get all six wheels into the crater. Rover entered crater in search of clues to an earlier history of water than those found at Eagle Crater where rover landed. During the final rock investigation inside the crater, scientists concluded that Endurance was most likely a salt flat, alternately wet and dry, rather than a deep-water environment.

67
Opportunity Timeline - Page 2 of 7 Sept. 22, 2004 - NASA announced Opportunity would leave Endurance Crater, visit its discarded heat shield, and proceed to Victoria Crater. Opportunity examines bedrock along the route between Endurance and Victoria craters. The texture of the bedrock on the way to Victoria is similar to the bottom layer of Endurance Crater suggesting a cyclical change in the environment. Nov. 11, 2004 - Opportunity leaves Endurance Crater by retracing its entry path. Jan. 19, 2005 - The rover found a meteorite near its heat shield. First meteorite identified on another solar system body - none were found on the Moon. Composed of iron and nickel, the pitted, basketball-sized rock landed on Mars. Meteorite that blasted Meteor Crater near Winslow, Arizona is similar in composition. Jan. 25, 2005 - Opportunity celebrates 1 Earth year on Mars. June 4, 2005 - Opportunity escaped from a sand dune where it had been stuck since April 26. Dec. 12, 2005 - Opportunity marks one Martian year (687 Earth days) on Mars. Jan. 25, 2006 - Opportunity celebrates 2 Earth years on Mars. Jan. 30, 2006 - Opportunity continues drive after robotic arm failure. Arm continues to operate but failure requires it to use partially unstowed position for short drives on smooth terrain and the old stowed position for longer or rougher drives. Feb. 26, 2006 - Opportunity investigated Payson outcrop, a 3 foot deep exposure in the
western rim of Erebus Crater.

68
Opportunity Timeline - Page 3 of 7 Mid-March 2006 - Opportunity began a 1.6 mile trek from Erebus to Victoria Crater. Victoria is about half a mile across and has a thick sequence of sedimentary rocks exposed. May 28, 2006 - Opportunity’s two rear wheels become embedded in a trough between two sand dunes. After the wheels are commanded to rotate an equivalent 157 feet, the rover moves 11 feet and parks on safe ground on June 6, 2006. June 20, 2006 - Opportunity investigated Beagle Crater. Blocks of ejecta around the rim of the crater suggest it may be the youngest crater the rover has seen. July 21, 2006 - Opportunity’s electrical power improves. Solar arrays are gradually cleaned over 50 Martian days - most likely from the wind. Sept. 27, 2006 - Opportunity reached the rim of Victoria Crater. Victoria Crater is one-half mile across and 230 feet deep. Scientists call Victoria Crater “a geologist’s dream come true.” Jan. 24, 2007 - Opportunity celebrates 3 Earth years on Mars. Opportunity has returned over 80,700 images and traveled 6.1 miles. Both rovers have lasted at this time more than twelve times their original life expectancy; Spirit and Opportunity were not expected to survive much longer than ninety days. May 1, 2007 - Opportunity tested new navigation capability. It enables the rover to plan optimal long-range drives around any obstacle in order to travel the most direct safe route to the designated destination.

69
Opportunity Timeline - Page 4 of 7 May 7, 2007 - The rock layers seen in Victoria Crater’s Cape St. Vincent are among the best examples of meter scale cross-bedding observed on Mars to date. Cross-bedding are rock layers inclined relative to the horizontal and are indicative of ancient sand dune deposits. June 2007 - A series of dust storms became worse and affected the surface operations of the rover. Opportunity broke its dust record, with the opacity level rising from 1.0 to 3.3 within a week. The dust storms delayed entry into Victoria Crater. Sept. 13, 2007 - After finishing an in-and-out maneuver to check wheel slippage near the rim of Victoria Crater, Opportunity re-entered the crater to begin exploration of the inner slope. The information the rover returned about the rock layers in Victoria Crater suggests the sediments were deposited by wind and then altered by groundwater. Aug. 28, 2008 - Opportunity exited Victoria Crater. The rover team elected to drive toward Endeavour Crater, 13.7 miles in diameter and about 1,000 ft deep, exposing a much thicker stack of rock layers than those previously examined.- The Mars Reconnaissance Orbiter observed clay minerals exposed at Endeavour Crater. -- Clay minerals, which form under wet and relatively neutral pH conditions, are more suitable for life. July 18, 2009 - The Opportunity team discovered the largest meteorite found by the rovers. The meteorite, about 2 ft across, was formed more than 4.5 billion years ago.

70
Opportunity Timeline - Page 5 of 7 March 4, 2010 - The first autonomously selected image by a spacecraft on Mars was taken of an observation target. Software chose a target from a wider-angle navigation camera image and pointed the panoramic camera to observe the chosen target. Sept. 8, 2010 - Opportunity reached the halfway point of its 11.4 mile journey between Victoria Crater and Endeavour Crater. July 15, 2010 - The first dust devil is observed in Opportunity’s six-and-one-half years on Mars. Spirit observed dozens of dust devils at its location in Gusev Crater halfway around Mars from Opportunity's location in the Meridian Planum region. Aug. 9, 2011 - Opportunity arrived at the rim of Endeavour Crater. Endeavour offers access to older geological deposits than any Opportunity has seen before. Nov. 7, 2011 - The rover team discovered a vein and found it rich in calcium and sulfur, possibly calcium-sulfate mineral gypsum. Observations reveal the vein and others like it, within an apron, surrounding a segment of the crater rim. The vein likely formed from mineral rich water moving through a crack in the rock. - It could have been produced in conditions more neutral than the harshly acidic conditions indicated by the other sulfate deposits. -- This environment may have been more hospitable for a large variety of living organisms.

71
Opportunity Timeline - Page 6 of 7 Dec. 2011 - Opportunity settled in at Greeley Haven on the rim of Endeavour Crater where it spent its fifth Martian winter. The site is of interest for its geologic features as well as the favorable northerly slopes to optimize Opportunity’s solar energy as winter approached. Dec. 24, 2011 - The rover endured a Martian dust storm and the rover team assessed the dustiness of the solar panels by using an Opportunity self-portrait image. May 8, 2012 - Opportunity moved from Greeley Haven after spending four months at its fifth winter location. By June 2012, the rover studied Mars dust and a nearby rock vein christened “Monte Cristo” as it headed North. August 29, 2012 - Mysterious small spherical objects are discovered at Matijevic Hill outcrop unlike “blueberries.” March 28, 2013 - Cape York Esperance rock provided evidence of favorable conditions for biology - more than any other wet environment recorded by the rover. Scientists hypothesized that the rock dates back to the Martian geologic Noachian Period, some 3.7 to 4.2 billion years ago. May 2013 - Opportunity departed the southern tip of Cape York and headed south for Solander Point. Solander Point provides a tall cross section of rock layers with access to older geological deposits.- A north-facing slope is available to enable the solar-powered rover to stay active and mobile through the coming Martian winter.

72
Opportunity Timeline - Page 7 of 7 October 8, 2013 - The rover began to climb Solander Point slope. The rover team investigated outcrops on the slope. January 25, 2014 - Opportunity celebrated 10 Earth years on Mars. The rover has traveled 24.07 miles and returned 187,000 images. October 19, 2014 - Opportunity’s panoramic camera took a picture of Sliding Spring comet just before its nearest approach to Mars. January 2015 - Rover achieved Cape Tribulation summit. March 24, 2015 - Opportunity surpassed Olympic marathon distance of 26.22 miles. August 2015 - Rover looks for clay minerals detected by Mars Reconnaissance Orbiter (MRO) here six Earth years ago. Instead, scientists found the residue of ancient iron magnesium clays spread all over the valley, in and around breccia bedrock hurled up and formed at the time the impact created Endeavour Crater. April 21, 2017 - Opportunity arrived at the top of “Perseverance Valley” on the rim of Endeavour Crater. From images taken by a camera on the MRO, scientists think that this ancient gully may have a great story to tell about past water.

73
Rover Navigation - Page 1 of 3 Opportunity has several team members who work as “rover drivers.” With a round-trip communication time that varies from 10 to 40 minutes, driving the rover in real-time is impossible. Instead, rover drivers assemble scripted driving sequences that are uploaded to the rover for the next day’s traverse. They create these sequences using images and other data collected by the rover in its current location as well as contextual views of the region collected by the Mars orbiters. By carefully tracking and avoiding visible obstacles, rover drivers can lay out a safe plan for the rover’s initial work the following day. The rover is capable of driving further in a single day than can be safely envisioned and planned for using the previous day’s images; therefore, it uses a combination of two driving modes.1) Blind Driving - The rover simply executes a pre-planned sequence of drives and turns.- The rover does not look where it is going but instead trusts that the sequence is correct.- Blind driving has a top speed of 2 inches/sec, and typically operates closer to 1.5 inches/sec to avoid consuming too much power.2) Autonomous Navigation - The rover takes an image of the terrain, determines how to safely navigate it, moves forward about 3.3 ft, and then repeats the process. - Blind driving is, of course, much more efficient than the stop-and-go process of autonomous navigation; although, neither one is fast by human standards. - Autonomous navigation is also slowed by the time it takes to process each image and compute a safe path; it generally achieves speeds of less than 0.4 inch/sec.-- Since autonomous navigation can extend the rover’s range in a day, drivers generally use it as a fallback after the pre-planned blind driving sequence runs out.

74
Rover Navigation - Page 2 of 3 Autonomous navigation depends on three key technologies:1) Real-time stereo analysis of navigation images - Allows the rover to determine the 3D
locations of rocks, ridges, and other features of its environment. Below is the stereo information that the Spirit rover computed for a rock called Humphrey that is 1.6 ft tall. It takes the rovers about 30 seconds to process each stereo pair.
2) Traversability map computation - The rover next computes a traversability map (shown below) that identifies which areas are safe to drive through and which are not. The area
Range (Distance)
VisualImage
Height
The pairs of images from the six engineering cameras that are mounted in stereo pairs acquire and feed into an image correlator that evaluates the potential matches for all of the pixels. Matched pixels are triangulated to generate a range estimate for every pixel. Range points are then compared against a known ground plane to produce an elevation image for the scene.
around the rover is divided into a grid. Given the stereo information, each grid cell is classified as safe, questionable, or dangerous (shown as green, yellow, or red below, respectively).

75
Rover Navigation - Page 3 of 3 Autonomous navigation depends on three key technologies (Continued):3) Obstacle avoidance - The Grid-based Estimation of Surface Traversability Applied to Local
Terrain (GESTALT) software package onboard the rover considers 48 candidate trajectories that the rover may follow, including 23 that move forward, 23 that move backward, and two in-place turns (clockwise and counterclockwise). The forward trajectories are shown below in white. GESTALT selects the trajectory that is safest, remaining in green grid cells as much as possible, while also moving the rover toward its next waypoint (as specified by the rover drivers). It takes the rover about 70 seconds to analyze all 48 trajectories and select the best one. The rover follows the selected trajectory about 3.3 ft, then stops and repeats the analysis and trajectory selection procedure.- In 2007, the rovers received the updated trajectory analysis procedure “Field D-Star” that permits the automated planning of drives as much as 164 ft long, depending on visibility.

76
Matijevic Hill “Newberries” Mystery The discovery of the tiny spherules or “newberries" in the close-up rover’s images and detailed color panoramic pictures have had the science team brimming with theories. Scientists have never seen such a dense accumulation of spherules in a rock outcrop on Mars. The newberries are different in concentration, structure, distribution, and composition from the blueberries.- The apparent basaltic nature of the newberries precludes the presence of iron oxide, as in the blueberries. The science team is looking at a variety of different ideas about what the newberries could be.- They are not pursuing any one theory but making observations that will enable them to distinguish among all of them.-- The team is being advised to keep an open mind and “let the rocks do the talking.”- The plan ahead is for Opportunity to check out other sites around Matijevic Hill and move back and forth and up and down along Kirkwood outcrop. -- The goal will be to understand the outcrop’s structure, stratigraphy, and how the layers combined, as well as the composition and the variation in composition. Theories the team are considering include:- The first possibility is that the newberries are concretions, but of a different kind than the hematite concretions or blueberries. - The second is that they were formed by an impact, and not necessarily from whatever made Endeavour Crater. - The third could be accretionary lapilli, little volcanic hailstorms that form in the cloud of debris that develops in a volcanic explosion; Pompeii is buried in this type of material.