On the orbital (in)stability of spatially periodic...
24
On the orbital (in)stability of spatially periodic stationary solutions of generalized Korteweg-de Vries equations Bernard Deconinck * Department of Applied Mathematics University of Washington Seattle, WA 98195 Todd Kapitula † Department of Mathematics and Statistics Calvin College Grand Rapids, MI 49546 February 16, 2009 Abstract. In this paper we generalize previous work on the stability of waves for infinite-dimensional Hamiltonian systems to include those cases for which the skew-symmetric operator J is singular. We assume that J restricted to the orthogonal complement of its kernel has a bounded inverse. With this assumption and some further genericity conditions we show that the linear stability of the wave implies its orbital (nonlinear) stability, provided there are no purely imaginary eigenvalues with negative Krein signature. We use our theory to investigate the (in)stability of spatially periodic waves to the generalized KdV equation for various power nonlinearities when the perturbation has the same period as that of the wave. Different solutions of the integrable modified KdV equation are studied analytically in detail, while numerical computations come to our aid for the nonintegrable cases with a fifth- and sixth-order nonlinearity. The stability question for KdV has been answered when the period of the perturbation is the same as that of the underlying cnoidal wave. However, up until now the question of the orbital stability of these waves with respect to periodic perturbations whose period is an integer multiple of the wave period was still open, as in this case there are eigenvalues with negative Krein signature, i.e., the wave is not a local minimizer of a constrained energy. By using the integrable structure associated with KdV we are able to show that these energetically unstable waves are indeed orbitally stable. Contents 1. Introduction 1 2. General theory 2 3. Application: generalized KdV with harmonic perturbations 7 3.1. Modified KdV: p =2 ......................................... 9 3.1.1. Focusing mKdV: solution √ 2 dn(x, k) ........................... 10 3.1.2. Focusing mKdV: solution √ 2 k cn(x, k) ........................... 12 3.1.3. Defocusing mKdV: solution √ 2 k sn(x, k) ......................... 15 3.2. Numerical examples: p = 4 and p =5 ............................... 16 4. Application: KdV with subharmonic perturbations 17 References 21 * E-mail: [email protected] † E-mail: [email protected]
Transcript of On the orbital (in)stability of spatially periodic...

On the orbital (in)stability of spatially periodic stationary solutions of
generalized Korteweg-de Vries equations
Bernard Deconinck ∗
Department of Applied MathematicsUniversity of Washington
Seattle, WA 98195
Todd Kapitula †
Department of Mathematics and StatisticsCalvin College
Grand Rapids, MI 49546
February 16, 2009
Abstract. In this paper we generalize previous work on the stability of waves for infinite-dimensionalHamiltonian systems to include those cases for which the skew-symmetric operator J is singular. Weassume that J restricted to the orthogonal complement of its kernel has a bounded inverse. With thisassumption and some further genericity conditions we show that the linear stability of the wave impliesits orbital (nonlinear) stability, provided there are no purely imaginary eigenvalues with negative Kreinsignature. We use our theory to investigate the (in)stability of spatially periodic waves to the generalizedKdV equation for various power nonlinearities when the perturbation has the same period as that ofthe wave. Different solutions of the integrable modified KdV equation are studied analytically in detail,while numerical computations come to our aid for the nonintegrable cases with a fifth- and sixth-ordernonlinearity. The stability question for KdV has been answered when the period of the perturbationis the same as that of the underlying cnoidal wave. However, up until now the question of the orbitalstability of these waves with respect to periodic perturbations whose period is an integer multiple of thewave period was still open, as in this case there are eigenvalues with negative Krein signature, i.e., thewave is not a local minimizer of a constrained energy. By using the integrable structure associated withKdV we are able to show that these energetically unstable waves are indeed orbitally stable.
Contents
1. Introduction 1
2. General theory 2
3. Application: generalized KdV with harmonic perturbations 73.1. Modified KdV: p = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.1. Focusing mKdV: solution√
2 dn(x, k) . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.1.2. Focusing mKdV: solution
√2 k cn(x, k) . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.3. Defocusing mKdV: solution√
2 k sn(x, k) . . . . . . . . . . . . . . . . . . . . . . . . . 153.2. Numerical examples: p = 4 and p = 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4. Application: KdV with subharmonic perturbations 17
References 21
∗E-mail: [email protected]†E-mail: [email protected]

B. Deconinck and T. Kapitula 1
1. Introduction
The stability of spatially periodic stationary solutions of nonlinear wave equations has seen differentadvances the past few years. There are advances both in the numerical investigation of spectral stability[11, 30], as well as in the analytical study of spectral and orbital stability (see [3, 6, 7, 15, 16, 19] and thereferences therein). We focus specifically on the study of the stability of periodic solutions in Hamiltonianpartial differential equations, as in [19]. In general, however, the results do apply to equations, e.g., theGross-Pitaevski equation (see [21] and the references therein), for which the appropriate linearized systemhas a self-adjoint operator with compact resolvent. Such equations may be written abstractly as
ut = J E ′(u), u(0) = u0 (1.1)
on a Hilbert space X, where J : X → X is skew symmetric, and E : X → R is a C2-functional. In previousworks (see [19, 22] and the references therein) it was assumed that J is nonsingular with bounded inverse.We do not make that assumption here. We allow ker(J ) to be nontrivial; however, we do assume thatJ |ker(J)⊥ has a bounded inverse.
We are interested in the spectral and orbital stability of spatially periodic waves to Eq. (1.1). The wavesare realized as critical points of a constrained energy, and the stability of the waves is determined by closelyexamining the Hessian, say L, of the constrained energy. It will henceforth be assumed that n(L) < ∞,where the notation n(S) is used to denote the number of negative eigenvalues (counting multiplicities) ofthe self-adjoint operator S. If J is nonsingular with bounded inverse, then it was seen in [18] that thereis a symmetric matrix D such that if n(L) − n(D) = 0, then the wave is orbitally stable. The matrix Dis intimately related to the conserved quantities for Eq. (1.1) which are generated by the group invariances.It was seen in [19, 24] and the references therein that if this difference is positive, then there exists a closerelationship between this difference and the structure of σ(JL), where JL is the linearization of Eq. (1.1)about the critical point. As we will demonstrate, this formula must be modified in the event that J issingular. In particular, the operator L, as well as the matrix D , must incorporate the fact that the onlynontrivial flow to Eq. (1.1) occurs on ker(J )⊥.
A concrete example to which the theory can be applied is the determination of the orbital (in)stabilityof spatially periodic stationary solutions of the generalized Korteweg-de Vries (gKdV) equation (p ∈ N)
ut + (uxx − cu± up+1)x = 0. (1.2)
Note that the ± sign is irrelevant when p is odd, but not so when p is even. With p = 1 Eq. (1.2) is theintegrable KdV equation, and when p = 2 it is the integrable modified KdV (mKdV) equation. For p ≥ 3 theequation is not integrable by any definition, but our general framework still applies. In this problem J = ∂x,and u ∈ ker(J )⊥ if u = 0, where u represents the spatial average. The theory we develop is applicableto Eq. (1.2) with any p ∈ N. However, when we consider the integrable cases we can do all calculationsexplicitly, providing examples that are far more concrete than for the non-integrable cases.
In this paper, we restrict ourselves to proving the orbital stability of spatially periodic stationary solutionsof gKdV for p ≥ 2 with respect to perturbations of the same period. This corresponds to the case of zeroFloquet exponent in [19], for which the determination of σ(JL) was left open there because it resultsin J being singular. For the mKdV equation, the results depend on which sign is considered. A few non-integrable examples are discussed as well. For these non-integrable cases we need to resort to some numericalcomputations.
Now consider the case of the so-called cnoidal wave solutions of the KdV equation. Their spectral andlinear stability were the subject of [6], and their orbital stability with respect to perturbations of the sameperiod was covered in [28] (using integrability) and [3] (not using integrability). Leaving the realm of periodicperturbations with the same period, by using the results of [6] and expanding upon them with the ideaspresented in [26] we are able to prove the orbital stability of the cnoidal wave solutions of the KdV equationwith respect to periodic perturbations, as long as the period is any integer multiple of the cnoidal waveperiod. We refer to such perturbations as subharmonic1 perturbations. Our results conclusively answer aquestion posed by Benjamin in 1972 [4, Page 12]:
1Note that superharmonic perturbations (perturbations whose period is the base period divided by a positive (> 1) integer)are covered by studying perturbations that have the same period as the underlying solution.

Stability of periodic waves to KdV 2
“The question thus arises whether, when released for the present sufficient condition for stability ( i.e.restriction to perturbations with the same period), periodic waves become unstable.”
In other words, Benjamin was asking whether waves which are energetically unstable, but not spectrallyunstable, can be orbitally stable. Benjamin posed the question for periodic water waves in general, and heexamined the problem in some detail for the cnoidal waves of the KdV equation. He provided some indicationsthat point to the instability of the cnoidal waves with respect to this class of perturbations. Ultimately, norigorous results were found, and the problem remained open. Bottman and Deconinck [6] were able toconfirm the spectral and linear stability of the cnoidal waves with respect to bounded perturbations. Theharder question of orbital stability is settled here.
The paper is organized as follows. In Section 2 we discuss the spectral theory and the orbital stabilitytheory for relative equilibria to Eq. (1.1) under the assumption that ker(J ) is nontrivial. In Section 3 weapply the results of the theory to Eq. (1.2) in the case of periodic waves of the same period as the underlyingsolution. We consider the case of the mKdV equation (p = 2) in detail for three of its periodic solutions.Next, we consider the cases of p = 4, 5 with the aid of some numerical computations. In Section 4 weestablish the orbital stability of the cnoidal wave solutions of the KdV equation (p = 1) with respect tosubharmonic perturbations.
Acknowledgments. BD acknowledges support from the National Science Foundation through grant NSF-DMS-0604546. TK gratefully acknowledges the support of the Jack and Lois Kuipers Applied MathematicsEndowment, a Calvin Research Fellowship, and the National Science Foundation under grant DMS-0806636.Any opinions, findings, and conclusions or recommendations expressed in this material are those of theauthors and do not necessarily reflect the views of the funding sources.
2. General theory
Much of the following discussion can be found in [22, Section 2]. It is included here for the sake ofcompleteness. Let U, V,X denote three real Hilbert spaces with U ⊂ X ⊂ V being dense and continuousembeddings. Throughout this paper, we use only the scalar product 〈·, ·〉 on the space V . In particular, wehave U ⊂ X ⊂ V ⊂ X∗ where X∗ denotes the dual space of X. Adjoint operators are always taken withrespect to the scalar product on V .
We are interested in relative equilibria of Eq. (1.1). These are solutions of Eq. (1.1) whose functionalform is invariant, in some sense, under the dynamics. Typical examples are traveling wave solutions whosedynamics consists of translation in x (as for Eq. (1.2)), or solutions whose time dependence consists of amultiplicative unitary scalar, as for Nonlinear Schrodinger-type equations, see [19]. In order to make thisnotion of invariance precise so as to formally define what is meant by relative equilibria, we need a fewelements from the theory of Lie groups and Lie algebras.
Let G be a finite-dimensional abelian Lie group with Lie algebra g. Denote by exp(ω) = eω for ω ∈ gthe exponential map from g into G. Next, assume that T : G → L(V ) is a unitary representation of G onV so that T ′(e) maps g into the space of closed skew-symmetric operators on V with domain X. Since J isnonsingular on Z⊥J , where ZA := ker(A) for an operator A, we make the additional assumption that:
Assumption 2.1. The group action T (·) satisfies:
(a) T (g) : ZJ 7→ ZJ , T (g) : Z⊥J 7→ Z⊥J
(b) ker(Tω) = ZJ .
In Assumption 2.1 the notation Tω := T ′(e)ω is used for the linear skew-symmetric operator which is thegenerator of the semigroup T (eωt). Note that Tω is also linear in ω ∈ g. We assume that U is contained inthe domain of T 2
ω . The group orbit Gu of an element u ∈ X is defined by Gu := T (g)u; g ∈ G.Remark 2.2. It is clear that Assumption 2.1(a) implies that
Tω : ZJ 7→ ZJ , Tω : Z⊥J 7→ Z⊥J .

B. Deconinck and T. Kapitula 3
We require Assumption 2.1(b) only so that we can consider critical points of a constrained energy whichare not necessarily in Z⊥J . If the critical point is assumed to be in Z⊥J , then this second assumption can beignored.
Next, we need two compatibility assumptions. First, we assume that E is invariant under G so that
E(T (g)u) = E(u)
for all u ∈ X and all g ∈ G. Second, let
T (g)J = J T (g−1)∗ (2.1)
for all g ∈ G. As a consequence of Assumption 2.1(b) we can define for each ω ∈ g the bounded functionalQω : X 7→ R by Qω(u) := 1
2 〈J−1Tωu, u〉. Its second derivative Q′′ω(u) = J−1Tω : X 7→ Z⊥J is a bounded
symmetric linear operator by Eq. (2.1). Note that Qω(T (g)u) = Qω(u).We are now positioned to define what we mean by relative equilibria of Eq. (1.1). These are solutions
u(t) whose time orbit is contained in the group orbit Gu0 so that u(t) ∈ Gu(0) for all t. Thus, φ ∈ X is arelative equilibrium of Eq. (1.1) if and only if there is an ω ∈ g so that u(t) = T (eωt)φ satisfies Eq. (1.1).Substituting the ansatz u(t) = T (eωt)φ into Eq. (1.1), we see that φ ∈ X is a relative equilibrium if and onlyif
Tωφ = J E ′(φ), (2.2)
for some ω ∈ g. As a consequence of Assumption 2.1(b) the expression in Eq. (2.2) makes sense for anyφ ∈ X. Note that Eq. (2.2) is equivalent to
J[E ′(φ)− J−1Tωφ
]= 0,
which is clearly satisfied upon havingE ′(φ)− J−1Tωφ ⊂ ZJ .
When discussing relative equilibria we will always assume that the right-hand side of the above is null. Inconclusion, φ ∈ X is a relative equilibrium if and only if φ is a critical point of the functional Hω := E −Qωfor some ω ∈ g. We assume throughout that there exists a smooth family of bound states:Hypothesis 2.3 (Relative equilibria). There exists a non-empty open set Ω ⊂ g and a C1 function φ : Ω→U , ω 7→ φω such that φω is a relative equilibrium, i.e., a critical point of Hω = E −Qω, for each ω ∈ Ω. Weassume that the isotropy subgroups g ∈ G; T (g)φω = φω are discrete for all ω so that the group orbitsGφω satisfy dim(Gφω) = dim(G).Remark 2.4. Since G is abelian, the entire group orbit T (g)φω with g ∈ G consists of relative equilibriawith time evolution T (eωt).
The self-adjoint Hessian of the energy at the relative equilibrium φω is defined as
L := H′′ω(φω) : U 7→ V. (2.3)
Note that the linearization of Eq. (1.1) around the relative equilibrium φω in the co-moving frame is givenby JL. Due to the invariance of Hω under the abelian group G, one has that the tangent space of the grouporbit Gφω at φω is contained in ZL. As a consequence of Hypothesis 2.3 it follows from [18, p. 314] that
ZL := spanTσφω; σ ∈ g, (2.4)
Upon writing X = ZJ ⊕ H1, where H1 := Z⊥J , let PJ : X 7→ H1 be the orthogonal projection onto therange of J , and let QJ := 1 − PJ : X 7→ ZJ be the orthognal projection onto ZJ . As a consequence ofAssumption 2.1(a) one has that PJ Tω = TωPJ . Since QJJ = JQJ = 0, one may rewrite the system
ut = JH′ω(u), u(0) = u0, (2.5)
for which φω satisfies H′(φω) = 0, as the system

Stability of periodic waves to KdV 4
∂tPJ u = JPJH′ω(PJ u+QJ u), PJ u(0) = PJ u0
∂tQJ u = 0, QJ u(0) = QJ u0.(2.6)
From Eq. (2.6) it is seen that QJ u(t) = QJ u(0) for all t ≥ 0; in other words, nontrivial evolution of theinitial data only occurs in H1. Consider an initial condition for Eq. (2.6) given by u0 = φω + v0, whereQJ v0 = 0. Since φω is a relative equilibrium, one sees from Eq. (2.6) that QJ v(t) = 0 for all t > 0. UsingPJ v = v, the evolution equation of interest is given by
vt = JPJH′ω(φω + v), v(0) = v0. (2.7)
Since the evolution occurs on H1, by assumption J is skew symmetric with bounded inverse.The relevant spectral problem associated with the stability problem for relative equilibria of Eq. (2.7) is
given by
JL|H1u = λu, L|H1 := PJLPJ . (2.8)
As in [19] we assume that L has a compact resolvent, which necessarily implies that L|H1 has a compactresolvent. While this assumption is not absolutely necessary (see [22] where the assumption is removed), it issatisfied for the applications we have in mind. We further assume for simplicity that Im(JL|H1) = 0, whichis true for the applications presented in this paper. As seen in [19], this assumption can also be removed.As a consequence of this assumption, eigenvalues for Eq. (2.8) come in the quartets ±λ,±λ∗. In contrastto [19] we do not assume that L|H1 is nonsingular. In fact, as a consequence of Assumption 2.1(b) one hasZL ⊂ H1; consequently, ZL ⊂ ZL|H1
.Since ZL ⊂ H1 and ZJ ⊂ Z⊥L , the expressions J−1(ZL) and L−1(ZJ ) make sense, where the notation
A(S) := y : y = As for some s ∈ S
is used. As a consequence of [22, equation (3.2)] it is known that
J−1(ZL) ⊥ ZL. (2.9)
This is determined by differentiating Eq. (2.2). It is henceforth assumed that
L−1(ZJ ) 6⊥ ZJ . (2.10)
The important consequence of this assumption is that ker(L) = ker(L|H1). Furthermore, since
ker(L|H1J ) = J−1(ZL),
upon using Eq. (2.9) there is a generalized eigenspace XL ⊂ H1 such that
JL|H1XL = ZL.
Set
D ij := 〈yi,L|H1yj〉, (2.11)
where yi ⊂ XL is any basis. If D is nonsingular, then by the Fredholm alternative
gker(JL|H1) = ZL ⊕XL, (2.12)
with mg(0) = dim(ZL) and ma(0) = 2mg(0). Here mg(λ) is the geometric multiplicity of the eigenvalue λ,ma(λ) ≥ mg(λ) is the algebraic multiplicity, and gker(A) refers to the generalized kernel of the operator A.
The setup is now almost complete. In order to apply the results of [19] we must recast the problem inthe appropriate space so that the operator L|H1 no longer has a nontrivial kernel. Let P : H1 7→ ZL|⊥H1
bethe orthogonal projection, and set Q = 1− P . For λ 6= 0 rewrite Eq. (2.8) as
L|H1u = λJ−1u. (2.13)

B. Deconinck and T. Kapitula 5
Upon using the projections P,Q one sees that Eq. (2.13) is equivalent to the system
PL|H1P · Pu = λPJ−1Pu+ λPJ−1Qu
0 = λQJ−1Pu+ λQJ−1Qu.(2.14)
As a consequence of Eq. (2.9) one has that QJ−1Qu = 0; thus, from the second line of Eq. (2.14) one hasthe identities
PJ−1Pu = J−1Pu, PJ−1Qu = J−1Qu.
The first line of Eq. (2.14) can be rewritten as
JPL|H1P · Pu = λPu+ λQu, (2.15)
which upon using PQ = 0 is further rewritten as
PJP · PL|H1P · Pu = λPu. (2.16)
In other words, when looking for nonzero eigenvalues Eq. (2.8) is equivalent to Eq. (2.16). Once Eq. (2.16)is solved, then Qu is uniquely determined by Eq. (2.15). It is an exercise to show that the same conclusionholds when considering generalized eigenfunctions.
Eq. (2.16) has the feature that the self-adjoint operator PL|H1P is nonsingular on Z⊥L ; unfortunately,one now has that for the adjoint operator,
ker(PL|H1P · PJP ) = ker(PJP ) = J−1(ZL). (2.17)
Consequently, since on Z⊥L ,ker(PJP · PL|H1P ) = XL,
one has the decomposition
H1 = ZL ⊕XL ⊕RL, RL := [ZL ⊕ J−1(ZL)]⊥. (2.18)
The difficulty associated with Eq. (2.17) is overcome by noticing that any solution u to Eq. (2.16) for nonzeroλ satisfies by the Fredholm alternative that u ∈ RL. Let Π : Z⊥L 7→ RL be the orthogonal projection, andfor v ∈ RL consider the eigenvalue problem
ΠPJPΠ ·ΠPL|H1PΠ ·ΠPv = λΠPv. (2.19)
We are using the fact that from Eq. (2.9), ΠP = PΠ. All the operators appearing in Eq. (2.19) arenonsingular, and solutions of Eq. (2.19) for nonzero λ correspond to solutions of Eq. (2.8) for the same valueof λ.
The theoretical ideas and results in [19] can now be applied to Eq. (2.19). It is known via the SCSBasis Lemma [19, Lemma 2.3] that the eigenvectors associated with Eq. (2.19) form a basis for RL. By [19,Theorem 2.13] one has that
kr + kc + k−i = n(〈w, [L|H1 ]|RLw〉). (2.20)
Here n(〈w,Aw〉) is the dimension of the maximal subspace for which 〈w,Aw〉 < 0 for the self-adjoint operatorA, kr refers to the number of real eigenvalues in the open right-half plane, kc is the number of complex-valuedeigenvalues in the open right-half plane, and k−i is the number of purely imaginary eigenvalues negative Kreinsignature. For λ ∈ (iR\0)∩ σ(JL|H1) let Eλ ⊂ RL be the associated eigenspace. If w ∈ RL, then one hasthat
〈w,ΠPL|H1PΠw〉 = 〈PΠw,L|H1PΠw〉 = 〈ΠPw,L|H1PΠw〉 = 〈w,L|H1w〉. (2.21)
Upon using Eq. (2.21) the Krein signature is defined as
k−i (λ) = n(〈w, [L|H1 ]|Eλw〉), k−i =∑
λ∈iR\0
k−i (λ).

Stability of periodic waves to KdV 6
If λ ∈ (iR\0) ∩ σ(JL|H1) is geometrically and algebraically simple with eigenfunction uλ, then
k−i (λ) =
0, 〈uλ,L|H1uλ〉 > 01, 〈uλ,L|H1uλ〉 < 0.
By using Eq. (2.18) one has that w ∈ Z⊥L is given by w = x + r, where x ∈ XL and r ∈ RL. A simplemodification of the proof leading to [19, Proposition 2.8] yields that for w ∈ Z⊥L ,
〈w,L|H1w〉 = 〈w, [L|H1 ]|XLw〉+ 〈w, [L|H1 ]|RLw〉. (2.22)
Since
n(D) = n(〈w, [L|H1 ]|XLw〉),
upon substituting Eq. (2.20) into Eq. (2.22) and noting that n(〈u,L|H1u〉) = n(L|H1), where n(A) is thenumber of strictly negative eigenvalues (counted with algebraic multiplicities) of the self-adjoint operator A,one sees that
kr + kc + k−i + n(D) = n(L|H1). (2.23)
The above discussion leads to the following theorem:
Theorem 2.5. Suppose that Assumption 2.1 holds, that
L−1(ZJ ) 6⊥ ZJ ,
and that D given in Eq. (2.11) is nonsingular. Then for the eigenvalue problem of Eq. (2.8)
kr + kc + k−i = n(L|H1)− n(D).
Remark 2.6. When considering the eigenvalue problem with no projection, i.e.,
JLu = λu,
it is clear that u ∈ H1 whenever λ 6= 0; consequently,
〈u,L|H1u〉 = 〈u,Lu〉. (2.24)
This observation will be important when considering the application presented in Section 4. Thus, therestriction to H1 is necessary to ensure that the eigenvalue count of Eq. (2.23) is correct.
Remark 2.7. Although the proof is significantly different, the result of Theorem 2.5 is exactly that as givenin [24]. The primary difference is that result assumed that J has bounded inverse, and hence L|H1 is simplyreplaced by L.
The following can now be said regarding solutions to Eq. (2.7). Assume that solutions exist globally intime. The key condition that must be verified in order to demonstrate orbital stability is that n(L|H1) = n(D)[18, Theorem 4.1]. By applying Theorem 2.5 one can say:
Theorem 2.8. Under the assumptions of Theorem 2.5, if kr = kc = k−i = 0, then the wave is orbitallystable. In other words, when considering solutions to Eq. (2.7) for each ε > 0 there is a δ > 0 such that
‖v0 − φω‖ < δ =⇒ infg∈G‖v(t)− T (g)φω‖ < ε.
Remark 2.9. Theorem 2.8 can be considered to be a natural generalization of the results of [5], as well asthe related works of [2, 3]. Unfortunately, the result cannot be used to furnish an alternate proof of theresults in [5], for in this work the operator J |H1 does not have a bounded inverse.

B. Deconinck and T. Kapitula 7
3. Application: generalized KdV with harmonicperturbations
Consider the generalized KdV equation with power nonlinearity, written in a frame of reference movingwith speed c:
ut + (uxx − cu± up+1)x = 0, p ≥ 1. (3.1)
The equation with the plus sign is referred to as the focusing gKdV, whereas that with the minus sign is thedefocusing gKdV. As discussed in [10], if p is odd then the sign is irrelevant, but if p is even then the twocases are genuinely distinct. Our interest in this section is in the orbital stability of 2L-periodic solutionsof Eq. (3.1) with respect to perturbations of period 2L, i.e., harmonic perturbations. We focus most of ourattention on the cases p = 1 (KdV) and p = 2 (mKdV). As stated in Section 1, both of these cases arecompletely integrable. It turns out, not surprisingly, that in these two special cases analytical calculationsare possible. Otherwise, it appears that one must resort to numerical methods. It is seen in [10] that globalsolutions exist to Eq. (3.1) for integral 1 ≤ p ≤ 3 for any size initial data in the appropriate space, whereasthe solutions exist globally for integral p ≥ 4 for sufficiently small initial data in the appropriate space.
Following the notation of the previous section one has that J = ∂x; hence, the space H1 is given by
H1 = u ∈ L2per[−L,L] : u = 0, u :=
12L
∫ L
−Lu(x, t) dx.
The projection operator is PJ u = u − u. The group action is given by T (ω)u(x, t) = u(x + ω, t), whichclearly satisfies Assumption 2.1(a). Since Tωu = J u, it is clear that Assumption 2.1(b) also holds. TheHamiltonian associated with Eq. (3.1) is
H(u) =∫ L
−L
(12u2x +
12cu2 ∓ 1
p+ 2up+2
)dx. (3.2)
Since Eq. (3.1) is written in a moving frame, the inclusion of the functional Qω merely results in shifting thevalue of c. We therefore omit Qω from the remainder of the discussion related to Eq. (3.1). Critical pointsof H(u) are found by looking for steady-state solutions of (3.1) which satisfy the ODE
uxx = cu∓ up+1. (3.3)
Let a 2L-periodic solution to Eq. (3.3) be denoted by U(x). Upon linearizing we obtain a linear eigenvalueproblem of the form Eq. (2.8) with
J = ∂x, L = −∂2x + c∓ (p+ 1)Up(x). (3.4)
Note that L is a Hill operator [27]. As a consequence of the spatial translation invariance associated withEq. (3.1) one knows that LUx = 0. Using the notation from Section 2,
ZJ = Span1, ZL = SpanUx, J−1(ZL) = SpanU − U, L−1(ZJ ) = SpanL−1(1).
It is not immediately clear that the assumption of Eq. (2.10) holds, i.e., L−1(1) 6= 0. We will show inLemma 3.1 that this condition holds if a certain function is nonzero.
The operator L|H1: H1 7→ H1 is given by
L|H1v = Lv ± (p+ 1)Upv. (3.5)
Let us deduce some properties regarding L|H1and σ(L|H1). Set λ0 < λ1 ≤ λ2 ≤ · · · to be the eigenvalues
of L, and let φj denote the associated normalized eigenfunction. Integrating (L− λj)φj = 0 with respect tox yields
± (p+ 1)Upφj = (c− λj)φj ; (3.6)

Stability of periodic waves to KdV 8
thus, if φj ∈ H1, then upon examining Eq. (3.5) one sees that λj ∈ σ(L|H1) with associated eigenfunctionφj . Of course, there may be eigenvalues of L|H1
that are not obtained this way. The eigenvalue problem(L|H1 − λ)u = 0 is equivalent to
LuC + C = λuC , C := ±(p+ 1)UpuC (3.7)
(see [12, 13, 23] and the references therein for a similar approach). The solution to Eq. (3.7) is given by
uC = 2LC∞∑j=0
φjλ− λj
φj , (3.8)
where in Eq. (3.8) the sum is implicitly over those eigenfunctions φj /∈ H1. Requiring uC ∈ H1 with C 6= 0then yields from Eq. (3.8) that
0 =∞∑j=0
φj2
λj − λ. (3.9)
We define
F (λ) :=∞∑j=0
φj2
λ− λj. (3.10)
Finding solutions to Eq. (3.7) is equivalent to finding zeros of the meromorphic function F (λ). Since L|H1
is self-adjoint, it is only necessary to consider zeros of F (λ) on the real line. Note that for λ ∈ R, F ′(λ) < 0;hence, any real-valued zero is simple. Furthermore, for each j ∈ N note that
limλ→λ+
j
F (λ) = +∞, limλ→λ−j+1
F (λ) = −∞, limλ→−∞
F (λ) = 0.
Combining these facts yields that for each j there is a unique λ∗j ∈ (λj , λj+1) such that F (λ∗j ) = 0. Further-more, if there is a finite number, say N , of eigenvalues of L which do not have eigenfunctions in H1, thenF (λ) → 0 as λ → +∞ and there are precisely N − 1 solutions to F (λ) = 0. As we will see below, in ourexamples N = 2.
The condition that L−1(ZJ ) 6⊥ ZJ is equivalent to L−1(1) 6= 0. The formulation leading to Eq. (3.10)reveals that this is precisely equivalent to F (0) 6= 0.Lemma 3.1. L−1(ZJ ) 6⊥ ZJ if and only if F (0) 6= 0.
Finally, let us find a basis for XL, which is needed in order to construct D . Solving
L|H1u = U − U,
is equivalent to solving
LuC + C = U − U, C := (p+ 1)± UpuC . (3.11)
The solution to Eq. (3.11) is given by
uC = L−1(U − U)− CL−1(1). (3.12)
The requirement that uC ∈ H1 results in
C =L−1(U − U)L−1(1)
. (3.13)
In conclusion, a basis for XL is given by uC , where C is given in Eq. (3.13).Below we consider the generalized KdV equation for specific values of the exponent p. We will do the
analysis for p = 2, and do some numerical calculations for p = 4, 5.

B. Deconinck and T. Kapitula 9
3.1. Modified KdV: p = 2
For the focusing case with p = 2 we work with the two families of stationary periodic solutions given by
u =√
2µdn(µx, k), c = µ2(2− k2)
u =√
2µk cn(µx, k), c = µ2(−1 + 2k2).
Here µ > 0, 0 ≤ k < 1, and dn(y, k) and cn(y, k) are Jacobi elliptic functions. For the defocusing case weuse
u =√
2µk sn(µx, k), c = −µ2(1 + k2).
The waves proportional to cn(y, k) and sn(y, k) have period 4K(k)/µ, where K(k) is the complete ellipticintegral of the first kind. The wave proportional to dn(y, k) has period 2K(k)/µ. The function K(k) issmooth, strictly increasing, and satisfies the limits
limk→0+
K(k) =π
2, lim
k→1−K(k) = +∞.
Note that the solutions we use by no means exhaust the stationary periodic solutions of the mKdV equation.We restrict ourselves to these because their functional form is the simplest, enabling explicit calculations.
Define
L0 := − d2
dx2+ 6k2 sn2(x, k).
When considering σ(L0) on the space L2per([−2K(k), 2K(k)]; C), it is known that the first five eigenvalues
are simple, and that all other eigenvalues have multiplicity two. In particular, the first five eigenvalues, aswell as the associated eigenfunctions, are given by
λ0 = 2(1 + k2 − a(k)); φ0(x) = k2 sn2(x, k)− 13
(1 + k2 + a(k))
λ1 = 1 + k2; φ1(x) = ∂x sn(x, k)
λ2 = 1 + 4k2; φ2(x) = ∂x cn(x, k)
λ3 = 4 + k2; φ3(x) = ∂x dn(x, k)
λ4 = 2(1 + k2 + a(k)); φ4(x) = k2 sn2(x, k)− 13
(1 + k2 − a(k))
(3.14)
where a(k) :=√
1− k2 + k4 [14]. The following proposition is useful for all subsequent calculations. As aconsequence of Proposition 3.2 the evaluation of the zeros of F (λ) defined in Eq. (3.10) will be straightforward.
Proposition 3.2. For j /∈ 0, 4, φj = 0.
Proof: An observation of Eq. (3.14) reveals that the result holds for j = 1, 2, 3. Now consider j ≥ 5. Uponusing the fact that L0φj = λjφj and integrating both sides over one period one sees that
λj〈φj , 1〉 = 6〈φj , k2 sn2(x, k)〉.
Set b(k) := (1 + k2− a(k))/3. Using the representation of φ4(x) given in Eq. (3.14) allows one to rewrite theabove as
(λj − 6b(k))〈φj , 1〉 = 6〈φj , φ4〉 = 0,
where the second inequality follows from the orthogonality of the eigenfunctions. Since λj − 6b(k) > 0 forj ≥ 5, the desired conclusion follows.

Stability of periodic waves to KdV 10
3.1.1. Focusing mKdV: solution√
2 dn(x, k)
Set
U(x; k) :=√
2 dn(x, k), c(k) := 2− k2, (3.15)
and consider the family of functions for µ > 0 given by
Uµ(x; k) := µU(µx; k), cµ(k) := µ2c(k). (3.16)
The fundamental period of U(x; k) is 2K(k). For a given half period L > 0 it is not hard to see that for
kµ(L) := K−1(µL), (3.17)
one has a smooth family of solutions Uµ(x; kµ(L)) of fundamental period 2L with an associated smoothc = cµ(kµ(L)). We now show that for a fixed L > 0, ∂µcµ > 0, which means that if so desired we may writeµ = µ(c). Since
cµ(L) = µ2c(kµ(L)),
one has that
∂cµ∂µ
= µ
[2c(kµ) + µL
dcdk
(kµ)dK−1(z)
dz(µL)
]=
2µkµK ′(kµ)
[(2− k2
µ)kµK ′(kµ)− k2µK(kµ)
].
The second equality follows from Eq. (3.15) and Eq. (3.17). Upon using the identities associated with K(k)and E(k) (the elliptic integral of the second kind) one eventually sees that
(2− k2)kK ′(k)− k2K(k) = kddk
(K + E) > 0.
The inequality follows from the fact that K + E is strictly increasing.From this point forward it will be assumed that the half period L > 0 is fixed. The linearization around
Uµ yields the operator
Lµ := − d2
dx2+ c− 3U2
µ. (3.18)
A simple change of variables shows that Lµφ = λφ can be rewritten as
µ2Lφ = λφ, L := L0 − (4 + k2). (3.19)
In other words, σ(Lµ) = µ2σ(L). Consequently, it suffices to consider L. The spectrum of L is derived fromthat of L0 via λj 7→ λj − (4 + k2) in Eq. (3.14). Set λj := λj − (4 + k2). Since the fundamental period is2K(k) the eigenvalues associated with λ1, λ2 are not relevant. Consequently, n(L) = 1 for all k ∈ [0, 1).
As a consequence of Proposition 3.2 one has that F (λ) given in Eq. (3.10) is given for any 0 ≤ k < 1 by
F (λ) =φ0
2
λ− λ0
+φ4
2
λ− λ4
. (3.20)
Using the explicit expressions given in Eq. (3.14), and using the identities
∫ K(k)
−K(k)
k2 sn2(x, k) dx = 2(K(k)− E(k))∫ K(k)
−K(k)
k4 sn4(x, k) dx =13
[(2 + k2)K(k)− 2(1 + k2)E(k)],
(3.21)

B. Deconinck and T. Kapitula 11
allows one to explicitly write the zero of F (λ) as
λ = 3(k2 − 2)K(k) + 2E(k)
K(k). (3.22)
Since
(k2 − 2)K(k) + 2E(k) = k(1− k2)K ′(k) + kE′(k) = −k2
∫ 1
0
x2(1− x2)√(1− x2)(1− k2x2)3
dx < 0,
we see from Eq. (3.22) that λ < 0. Thus n(L|H1) = 1.In order to complete the calculation, we compute D . Differentiation of Eq. (3.3) with respect to c gives
Lµ∂cUµ + Uµ = 0, so that
L−1µ (Uµ) = −∂cUµ = −∂µUµ
∂µcµ. (3.23)
From Eq. (3.13) it follows that
C =〈L−1
µ (Uµ), 1〉〈L−1
µ (1), 1〉− Uµ.
Since ∂µcµ > 0, Eq. (3.23) implies that the important quantity to compute is
∂
∂µ〈Uµ, 1〉 =
∂
∂µ
∫ +L
−LUµ(x, kµ) dx
(recall that L > 0 is fixed). Using Eq. (3.16)∫ +L
−LUµ(x, kµ) dx =
∫ +K(kµ)
−K(kµ)
U(x; kµ) dx =π√2.
Hence ∂µ〈Uµ, 1〉 = 0, and thus C = −Uµ. Consequently, in Eq. (3.12)
uC = L−1µ (Uµ). (3.24)
Then
D = 〈uC ,L|H1uC〉 = 〈L−1µ (Uµ), Uµ − Uµ〉 = 〈−∂cUµ, Uµ − Uµ〉 = −1
2∂
∂c〈Uµ, Uµ〉+ Uµ〈∂cUµ, 1〉
= −12∂
∂c〈Uµ, Uµ〉,
where we have used Eq. (3.23) and Eq. (3.24).Since
〈Uµ, Uµ〉 = µ
∫ K(kµ)
−K(kµ)
U2(x; kµ) dx = 2µE(kµ),
where the second equality follows from the identity dn2(x, k) = 1− k2 sn2(x, k) and Eq. (3.21), one has that
D = −∂µ∂c
∂
∂µµE(kµ).
Using the product rule and the chain rule we get
D = −∂µ∂c
1K ′(kµ)
ddkµ
K(kµ)E(kµ).
Since K(k)E(k) is strictly increasing, and since ∂µcµ > 0, it follows that n(D) = 1. In conclusion, kr = kc =k−i = 0. Upon applying Theorem 2.8 the following result is obtained.

Stability of periodic waves to KdV 12
Theorem 3.3. Consider the solution Uµ(x) =√
2µdn(µx, k) on the space L2per([−K(k)/µ,K(k)/µ]; R)
endowed with the natural inner-product. For a given ε > 0 sufficiently small there is a δ > 0 such that if‖v − Uµ‖ < δ with v = Uµ, then
infω∈R‖v(t)− Uµ(·+ ω)‖ < ε.
Thus the dn solution of the focusing mKdV equation is orbitally stable with respect to periodic perturbationsof the same period for all values of the elliptic modulus.
Remark 3.4. The result of Theorem 3.3 was recently established in [1]; however, the proof there is differentthan that presented here. In particular, the proof in [1] fails when n(L) = 2, which will be the case in nextproblem.
3.1.2. Focusing mKdV: solution√
2 k cn(x, k)
Next set
U(x; k) :=√
2 k cn(x, k), c(k) := −1 + 2k2, (3.25)
and consider the family of functions for µ > 0 given by
Uµ(x; k) := µU(µx; k), cµ(k) := µ2c(k). (3.26)
For this second case, the fundamental period of Uµ(x; k) is 4K(k). For a given half-period L > 0 it is nothard to see that for
kµ(L) := K−1(µL/2), (3.27)
one has a smooth family of solutions Uµ(x; kµ(L)) of fundamental period 2L with an associated smoothc = cµ(kµ(L)). We now show that for a fixed L > 0 one has ∂µcµ > 0, which means that if so desired onecan write µ = µ(c). Since
cµ(L) = µ2c(kµ(L)),
one has that
∂cµ∂µ
= µ
[2c(kµ) +
µL
2dcdk
(kµ)dK−1(z)
dz(µL/2)
]=
2µkµK ′(kµ)
[(−1 + 2k2
µ)kµK ′(kµ) + 2k2µK(kµ)
].
The second equality follows from Eq. (3.25) and Eq. (3.27). Using the definition of K(k) yields
(−1 + 2k2)kK ′(k) + 2k2K(k) = k2
∫ 1
0
2− x2√(1− x2)(1− k2x2)3
dx > 0.
Since K ′(k) > 0, the desired result follows.From this point forward we assume that L > 0 is fixed. The linearization around Uµ yields the operator
Lµ := − d2
dx2+ c− 3U2
µ. (3.28)
Scaling the dependent and independent variables allows us to rewrite the spectral problem Lµφ = λφ as
µ2Lφ = λφ, L := L0 − (1 + 4k2). (3.29)
In other words, σ(Lµ) = µ2σ(L). Consequently, it suffices to consider L. The spectrum of L is derivedfrom that of L0 via λj 7→ λj − (1 + 4k2) in Eq. (3.14). Set λj := λj − (1 + 4k2). Unlike in the dn case,

B. Deconinck and T. Kapitula 13
the fundamental period is 4K(k). Hence, all of the eigenvalues in Eq. (3.14) are relevant. Consequently,n(L) = 2 for all k. Furthermore, since φ1 = 0 and λ1 < 0, one has that n(LH1) ≥ 1.
The result of Proposition 3.2 still holds. Thus F (λ) given in Eq. (3.10) is still given by Eq. (3.20) withthe appropriate substitution. Using the explicit expressions given in Eq. (3.27), and using Eq. (3.21), allowsone to explicitly write the zero of F (λ) as
λ = 32E(k)−K(k)
K(k)=
3K(k)
ddkkE(k). (3.30)
Since
limk→0+
ddkkE(k) = E(0) > 0, lim
k→1−
ddkkE(k) = −∞, d2
dk2kE(k) < 0
there is a unique k∗ ∼ 0.909 such that λ > 0 for 0 ≤ k < k∗, while λ < 0 for k∗ < k < 1. In conclusion,
n(L|H1) =
1, 0 ≤ k < k∗,2, k∗ < k < 1.
(3.31)
Now we compute D in order to complete the calculation. As before, differentiation of Eq. (3.3) withrespect to c yields that Lµ∂cUµ + Uµ = 0. Thus
L−1µ (Uµ) = −∂cUµ. (3.32)
Since
〈U, 1〉 = 0,
arguing as in the previous case yields that
uC = L−1µ (Uµ). (3.33)
It follows that
D = 〈uC , Uµ − Uµ〉 = −12∂
∂c〈Uµ, Uµ〉 = −4
∂µ
∂c
∂
∂µµ[E(kµ)− (1− k2
µ)K(kµ)]. (3.34)
The final equality follows from cn2(x, k) = 1− sn2(x, k) and Eq. (3.21). Since
E(k)− (1− k2)K(k) = k(1− k2)dKdk
> 0,
and
∂
∂µk(1− k2)
dKdk
=∂k
∂µ
∂
∂kk(1− k2)
dKdk
=∂k
∂µkK(k),
and upon noticing that
∂µ
∂c
∂k
∂µ=∂k
∂c> 0,
one eventually sees that n(D) = 1. Since k−i and kc are even, it then follows that kc = k−i = 0, but
kr =
0, 0 ≤ k < k∗1, k∗ < k < 1.
(3.35)
Hence, for k < k∗ the cn wave of period 2T is a constrained minimizer and thus stable with respect toperiodic perturbations of period 2T . On the other hand, the cn wave is unstable for k > k∗.

Stability of periodic waves to KdV 14
Theorem 3.5. Consider the solution Uµ(x) =√
2µk cn(µx, k) on the space L2per([−2K(k)/µ, 2K(k)/µ]; R)
endowed with the natural inner-product. Define k∗ as the unique value satisfying K(k∗) = 2E(k∗). Ifk < k∗ ∼ 0.909, then for a given ε > 0 sufficiently small there is a δ > 0 such that if ‖v − Uµ‖ < δ withv = Uµ, then
infω∈R‖v(t)− Uµ(·+ ω)‖ < ε.
Thus, the cn solution of the focusing mKdV equation is orbitally stable with respect to periodic perturbationsof the same period, provided the elliptic modulus k < k∗. If k > k∗, then the wave is unstable.
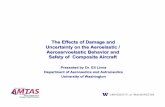
Remark 3.6. If the operator J were nonsingular, then n(L) = 2 would imply that kr = 1 for all valuesof k. This example shows that the modification of the result of [24] presented in Theorem 2.5 is indeednecessary, and is not simply a technical detail. Furthermore, this example provides a counterexample to thestatement of [9, Theorem 7], which, while explicitly stated for a 5th-order KdV equation, is clearly valid forthe equations considered in this paper. The proof of [9, Theorem 7] fails because the authors do not takeinto account the fact that J does not have a bounded inverse. However, it is not clear that the results ofthis paper immediately apply to that work, for here it is assumed that J has a bounded inverse on Z⊥J ,whereas in their setting this is no longer true.Remark 3.7. Without loss of generality assume that µ = 1. A numerical calculation of σ(JL) showsthat the wave is unstable for any value of k when considering the space L2
per([−2nK(k), 2nK(k)]; R) forany integral n ≥ 2. This is illustrated in Figure 1. The spectra illustrated there were computed usingSpectrUW2.0, using 20 Fourier modes and 400 equally-spaced Floquet exponents, with P = 1 [8]. Note thedifferent scalings of the different figures. Since the density of the eigenvalues computed is not uniform, thereare some parts of the spectrum where we have less information than elsewhere. Nevertheless, between what isknown theoretically about the spectra and what we observe numerically, we feel the statements made beloware safe inferences based on the numerical results plotted. For all plots in Figure 1, the entire imaginary axisis part of the spectrum, whereas the real axis is not (except for the origin, and perhaps two other points, seebelow). It should also be pointed out that all plots are consistent with the results of Bronski and Johnson[7]: at the origin, the spectrum should generically consist of either the imaginary axis (with multiplicitythree), or of three distinct components, all intersecting at the origin. In our case, the second scenario unfoldsfor all but one value of k, see below. From the numerical results, it appears that all self-intersection pointsof the spectrum occur at eigenvalues corresponding to eigenfunctions with period 4K(k).
• For k < k∗, in addition to the imaginary axis, the spectrum consists of the boundary of two lobes,each cut in half by the imaginary axis. Of course, the lobes are symmetric with respect to the realand imaginary axes. The lobes touch at the origin. The boundary of the upper lobe has a secondintersection point with the imaginary axis which approaches the origin as k → k∗−. One of theeigenfunctions corresponding to this point is periodic with period 4K(k). It is the first (in terms ofdistance to the origin) non-zero eigenvalue on the imaginary axis corresponding to a period 4K(k)eigenfunction. This case is illustrated in Figures 1a-c. For the last panel k = 0.908, very close tok∗ ∼ 0.909. For k < k∗, the origin is the only point on the real axis that is in the spectrum.
• It appears that three eigenvalues with periodic eigenfunctions collide at the origin for k = k∗.For k < k∗ all three eigenvalues are on the imaginary axis. For k > k∗ all three are on the realaxis, giving rise to unstable and stable directions. For k = k∗, it appears the spectrum near theorigin appears to consists of more than three components (counting multiplicities), leading to theconclusion that for k = k∗ the discriminant of Bronski and Johnson [7] is zero. The case of a zerodiscriminant is not discussed in [7].
• For k > k∗, in addition to the imaginary axis, the spectrum consists of additional curves, boundinga total of six regions in C, three in the right-half plane, three in the left-half plane. We describe theones in the right-half plane. Using the left-right symmetry of the spectrum completes the picture.There is a region touching the origin, which has a point furthest from the origin, which is a self-intersection point of the spectrum. This point corresponds to an eigenfunction with period 4K(k).It is the unstable eigenvalue given by Eq. (3.30). To the right of this point are two more lobes,one above the real axis, one below. For k greater than but close to k∗, the region touching theorigin is small, and the two remaining lobes are relatively large. This is illustrated in Figures 1d-e.

B. Deconinck and T. Kapitula 15
Figure 1e is a zoom-in of Figure 1d near the origin. Due to the low density of computed eigenvaluesthe left (right) side of the right (left) upper and lower lobes is not visible in Figure 1e. For Figure 1f,k = 0.95, and the outer lobes have decreased in size, whereas the regions touching the origin havegrown.
In summary, the numerical results show that the cn solution of the mKdV equation is unstable with respectto perturbations of period 4nK(k) for any n ≥ 2, even if it is stable with respect to perturbations of period4K(k).
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–0.6 –0.4 –0.2 0.2 0.4 0.6
–0.3
–0.2
–0.1
0
0.1
0.2
0.3
–0.6 –0.4 –0.2 0.2 0.4 0.6
–0.3
–0.2
–0.1
0
0.1
0.2
0.3
–0.6 –0.4 –0.2 0.2 0.4 0.6
(a) k = 0.7 < k∗ (b) k = 0.9 < k∗ (c) k = 0.908 < k∗
–0.3
–0.2
–0.1
0
0.1
0.2
0.3
–0.6 –0.4 –0.2 0.2 0.4 0.6
–0.0004
–0.0002
0
0.0002
0.0004
–0.2 –0.1 0.1 0.2
–0.04
–0.02
0
0.02
0.04
–0.6 –0.4 –0.2 0.2 0.4 0.6
(d) k = 0.91 > k∗ (e) k = 0.91 > k∗ (zoom) (f) k = 0.95 > k∗
Figure 1: Numerical computations of σ(JL) using the space L2per([−2nK(k)/µ, 2nK(k)/µ]; R)
with n = 400. For a detailed explanation, see the main text.
3.1.3. Defocusing mKdV: solution√
2 k sn(x, k)
In the defocusing regime there exists a family of solutions
Uµ(x; k) :=√
2µk sn(µx, k), cµ(k) := −µ2(1 + k2). (3.36)
The linearization around Uµ yields the operator
Lµ := − d2
dx2+ c+ 3U2
µ. (3.37)

Stability of periodic waves to KdV 16
A simple change of variables yields that Lµφ = λφ can be rewritten as
µ2Lφ = λφ, L := L0 − (1 + k2). (3.38)
In other words, σ(Lµ) = µ2σ(L). Consequently, it is enough to consider L. The spectrum of L is derivedfrom that of L0 via λj 7→ λj − (1 + k2) in Eq. (3.14). Setting λj := λj − (1 + k2), one sees that n(L) = 1;however, the associated eigenfunction does not have zero mean. Arguing as in the previous cases gives thatthe relevant eigenvalue for L|H1 is
λ = 32E(k)− (1− k2)K(k)
K(k)= 3
E(k) + k(1− k2)K ′(k)K(k)
> 0. (3.39)
Since n(L|H1) = 0, one has the following:Theorem 3.8. Consider the solution Uµ(x) =
√2µk sn(µx, k) on the space L2
per([−2K(k)/µ, 2K(k)/µ]; R)endowed with the natural inner-product. For a given ε > 0 sufficiently small there is a δ > 0 such that if‖v − Uµ‖ < δ with v = Uµ, then
infω∈R‖v(t)− Uµ(·+ ω)‖ < ε.
Thus the sn solution of the defocusing mKdV equation is orbitally unstable with respect to perturbations ofthe same period.
Remark 3.9. The comments of Remark 3.6 also apply here.
3.2. Numerical examples: p = 4 and p = 5
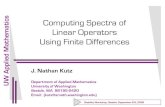
In order to illustrate the utility of the theory, we include a couple of examples for which n(L|H1) and Dmust be computed numerically. First consider the case of p = 4 and the wave that has a cn-like profile, i.e.,it has a unique zero over its fundamental period, and it has a unique minimum and maximum. The numericsare shown in Figure 2. The left-hand panel shows that n(L|H1) = 2, while the right-hand panel shows thatn(D) = 1 (the inset in the right-hand panel is a typical wave profile over one fundamental period). As aconsequence of Theorem 2.5 we conclude that the cn-like wave of period 2L is unstable with kr = 1; thus, itis unstable with respect to perturbations of period 2L.
Figure 2: (color online) σ(L|H1) and D for a cn-like wave profile depicted in the inset of theright-hand panel in the case of p = 4.
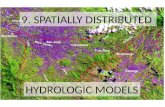
Now consider p = 5, but with a wave that has a dn-like profile, i.e., it is positive over its fundamentalperiod, and it has a unique maximum. The numerics are shown in Figure 3. The left-hand panel shows thatn(L|H1) = 1, while the right-hand panel shows that n(D) = 1 for L < L∗, and n(D) = 0 for L > L∗(theinset in the right-hand panel is a typical wave profile over one fundamental period). As a consequence of

B. Deconinck and T. Kapitula 17
Theorem 2.5 one can conclude that the wave is unstable with kr = 1 for L > L∗. This is consistent withthe application of the spectral approximation theory of [31] to the known instability result for the limitingsolitary wave [29] (also see [17]). Otherwise, there is numerical evidence for the claim that if L < L∗, thewave is orbitally stable.
Figure 3: (color online) σ(L|H1) and D for a wave profile depicted in the inset of the right-handpanel in the case of p = 5.
4. Application: KdV with subharmonic perturbations
In this section, we consider the stability of the stationary periodic solutions of the KdV equation (p = 1)with respect to subharmonic perturbations, i.e., perturbations that are periodic with period equal to aninteger multiple of the solution’s fundamental period. We have already recounted some of the history of thisproblem in the introduction. A more extensive review of the literature on this problem is found in [6].
For the KdV equation p = 1, and one may consider the focusing case only, as argued before. Thestationary periodic waves are given by
U = 6µ2k2 cn2(µx, k), c = 4µ2(2k2 − 1), (µ > 0). (4.1)
The wave has fundamental period 2K(k)/µ, and is referred to as the (KdV) cnoidal wave. Note that unlikein the previous section where we considered special stationary periodic solutions of the mKdV equation, thecnoidal wave Eq. (4.1) represents all stationary periodic solutions of the KdV equation, up to the effect ofLie symmetries (Galilean shift, spatial translation, . . . ).
Different stability results for the cnoidal waves have been obtained elsewhere, albeit using differentmethods from the one expounded in the previous section. The orbital stability of the cnoidal waves withrespect to periodic perturbations of the same period was considered in [3], and the linear stability withrespect to periodic perturbations of period any integer multiple of the cnoidal wave period was shown in [6].
Here we show that the cnoidal waves Eq. (4.1) are stable when considered on the spaceL2
per([−nK(k)/µ, nK(k)/µ]) for any n ∈ N, i.e., with respect to subharmonic perturbations. The primarydifficulty that must be overcome is that for n ≥ 2 one necessarily has k−i ≥ 2; hence, the wave is not aconstrained minimizer of the “natural” energy. This issue can be resolved if another time-invariant energyfunction for which the wave is a constrained minimizer can be found . In general, it is practically impos-sible to find such a function. However, since KdV is an integrable equation, one has an infinite number ofcandidate functions. The ideas we combine are (a) those presented in the general theory of Section 2, (b) aspectral analysis for integrable equations as demonstrated in [6], and (c) the Lyapunov function constructiontechniques most recently used in [20] (also see the references therein, and in particular the seminal work of[26]).

Stability of periodic waves to KdV 18
In what follows, we let µ = 1, so that L := K(k). The effect of including µ is an overall scaling in thecalculations below. First we calculate the Krein signature associated with the operator L and eigenvalue λ,defined as the sign of
K1(λ) = 〈W,LW 〉n :=∫ nL
−nLW ∗LW dx,
where n ∈ N and W is a solution of the spectral problem JLW = λW . Recall that for λ ∈ iR one has that
k−i (λ) =
0, K1 > 0,1, K1 < 0.
An explicit representation for W is given in [6], and we use it here to calculate K1(λ). From [6, Eq. (27)and Eq. (28)],
W (x) = γ2(x)(
4ζ − c+U
12
)(U ′
6− λ(ζ)
2
), (4.2)
where ζ ∈ (−∞, k2 − 1] ∪ [2k2 − 1, k2] parameterizes the spectrum of the Lax operator associated with theKdV equation [6, Eq. (16)]. Further,
λ2(ζ) = 64(ζ − k2 + 1)(ζ − 2k2 + 1)(ζ − k2) ≤ 0, (4.3)
and
γ(x) = γ0 exp(∫
−U ′/6− λ(ζ)/24ζ − c+ U/12
dx)
=γ0
2(ζ − k2 − k2 sn2(x, k) + 1)1/2ei arg γ(x),
where γ0 is a real constant and arg γ(x) is the argument of γ(x). Thus Eq. (4.2) represents two eigenfunctions,one for each choice of the sign of λ(ζ).
A direct calculation shows that the integrand of K1(λ) is given by
W ∗LW = −16|γ(x)|4λ(ζ)(ζ − k2 − k2 sn2(x, k) + 1
)3 (8k2 cn(x, k) dn(x, k) sn(x, k)− λ(ζ)
)= −λ(ζ)
(ζ − k2 − k2 sn2(x, k) + 1
) (8k2 cn(x, k) dn(x, k) sn(x, k)− λ(ζ)
).
Note that
cn(x, k) dn(x, k) sn(x, k) ∼ ∂
∂x
(ζ − k2 − k2 sn2(x, k) + 1
).
This implies that the term
−λ(ζ)(ζ − k2 − k2 sn2(x, k) + 1
)cn(x, k) dn(x, k) sn(x, k)
does not contribute to K1(λ), as the integral is over a number of periods of the periodic integrand. Thus,one has that
K1(λ) = λ2(ζ)∫ nL
−nL
(ζ − k2 − k2 sn2(x, k) + 1
)dx. (4.4)
As shown in [6, Figure 4], the essential spectrum of JL consists of two components: a single coveringof the imaginary axis corresponding to ζ ≤ k2 − 1, and an additional double covering of a symmetricinterval on the imaginary axis around the origin, corresponding to ζ ∈ [2k2 − 1, k2]. Restricting ourselvesto eigenfunctions with period 2nL results in a discrete subset of these spectral sets. Considering the above,we observe that for ζ ≤ k2 − 1 the integrand in Eq. (4.4) is negative, resulting in K1(λ) ≥ 0, with equalityattained only for ζ = k2 − 1. This corresponds to the single covering of the imaginary axis having positiveKrein signature. Next, when ζ ∈ [2k2 − 1, k2] the integrand in Eq. (4.4) is positive so that K1(λ) ≤ 0, withequality attained again at the endpoints only. Thus the double covering of the imaginary interval around the

B. Deconinck and T. Kapitula 19
origin has negative Krein signature. Although informative, no orbital stability conclusion about the KdVcnoidal wave can be reached from these considerations since K1(λ) does not have definite sign.
At this point, we invoke more tools arising from the integrability of KdV. The KdV equation is the firstnontrivial equation of an infinite hierarchy of partial differential equations that have mutually commutingflows2. Let us denote the next equation in the KdV hierarchy as KdV2. That equation contains a fifth-orderlinear dispersive term, as well as various nonlinear terms. Its precise form is not important here, but can befound, for instance, in [25]. It is written abstractly as
ut2 = J (H′2 + c1H′1 + c0H′0) , (4.5)
where J = ∂x, and H2 is a functional whose density depends on u, ux, and uxx. Further, H1 = H, givenin Eq. (3.2), but with integration bounds from −nL to nL. Lastly, H0 =
∫ nL−nL u
2x/2 dx. Since the flows of
KdV and KdV2 commute, the cnoidal wave solution Eq. (4.1) of KdV is a stationary (with respect to t2)solution of KdV2 for a suitable choice of the constants c1 and c0 appearing in Eq. (4.5). This fixes c0, butit imposes no constraint on c1, since the cnoidal wave Eq. (4.1) is a stationary point of H1. Thus, c1 is afree parameter: for any choice of c1 the cnoidal wave Eq. (4.1) is a stationary periodic solution of KdV2Eq. (4.5).
We may now consider the stability problem with respect to the dynamical variable t2 for the cnoidalwave solution. The linear stability problem is given by
wt2 = JL2w,
with
L2 = ∂4x +
103U(x)∂2
x +103U ′(x)∂x +
103U ′′(x) +
103U2(x)− c1
(−∂2
x + c− 2U(x))− 16 + 56k2(1− k2).
The freedom in choosing c1 gives rise to a one-parameter family of linear stability problems. The Kreinsignature associated with the eigenvalue λ2 of the operator JL2 is the sign of
K2(λ2) := 〈W,L2W 〉 =∫ nL
−nLW ∗L2W dx, (4.6)
The eigenfunction W (y) is the same as before, due to the commuting property of the flows. This is also easilyverified using a direct calculation. All eigenfunctions of JL2 are obtained this way, since the eigenfunctionsW form a complete set in L2
per([−nL, nL]), see below. A simple linear algebra calculation along the lines ofthat done in [6, Section 5] using the Lax pair of KdV2 demonstrates that
λ2(ζ) ∼ λ(ζ)(4ζ + c1 + 8k2 − 4). (4.7)
Another direct calculation gives an expression for the integrand of Eq. (4.6) as
W ∗L2W = 16|γ(x)|4λ(ζ)(4ζ + c1 + 8k2 − 4
) (ζ − k2 − k2 sn2(x, k) + 1
)3×(8k2 cn(x, k) dn(x, k) sn(x, k)− λ(ζ)
).
Using the same simplifications and substitutions as above, we finally get the remarkable result that K2(λ2)is linearly related to K1(λ) via the relationship
K2(λ2) = −(4ζ + c1 + 8k2 − 4)K1(λ).
The extra factor 4ζ + c1 + 8k2 − 4 changes sign when ζ crosses 1 − 2k2 − c1/4. If we choose c1 so thatits product with K1(λ) is always positive (or zero, where K1(λ) = 0), then K2(λ2) does not change sign. Tothis end we need
2Two different hierarchies play a role. For the first one, equations later in the hierarchy have no terms in common withthose that appeared earlier. In the second hierarchy, an equation at any order contains constant linear combinations of thoseappearing at lower order. The second hierarchy is used here. Thus, KdV2 contains a constant multiple of KdV.

Stability of periodic waves to KdV 20
k2 − 1 < 1− 2k2 − c1/4 < 2k2 − 1,
which is easily satisfied by choosing
4(2− 4k2) < c1 < 4(2− 3k2). (4.8)
In conclusion, we see that it is possible to choose the free parameter c1 so that K2(λ2) is positive definite forany choice of the elliptic modulus k. Note that K2(λ2) = 0 only when ζ equals one of the three roots of theright-hand side of Eq. (4.3). For these values λ = 0, which using Eq. (4.7) implies λ2 = 0. Thus K2(λ2) ≥ 0,with equality attained only when λ2 = 0.
Now let us consider the implications of this calculation. It is straightforward to check that [19, Assump-tion 2.1(d)] is satisfied with s = 1, r = 3/5, and r′ = 4/5 > r; hence, the SCS Basis Lemma is applicable,and the eigenfunctions of JL2 associated with nonzero eigenvalues will be a basis for any n ∈ N (notethat for gKdV one has that s = 1, r = 1/3, r′ = 2/3). As was seen in [19], the proper perspective whendoing a spectral analysis in a space of localized but nonperiodic perturbations is to first do a Bloch-wavedecomposition, and then consider the spectrum of the resulting operators. In other words, upon setting
W (x) = Z(x)eiγx/2L, −π ≤ γ < π, (4.9)
and noting thatW (x+ 2L) = W (x)eiγ ⇐⇒ Z(x+ 2L) = Z(x),
one recasts the eigenvalue problem
JL2W = λW, W (L) = W (−L)eiγ
asJγL2,γZ = λZ, Z(−L) = Z(L). (4.10)
Here the operators Jγ and L2,γ are formed from J and L2 by mapping ∂x 7→ ∂x + i/2L, respectively. Whenconsidering subharmonic perturbations of the underlying wave one naturally solves Eq. (4.10) for some finiteset of γ ∈ Q; otherwise, γ ∈ R\Q. For the operator L it is known that there are two bands of unstablespectrum, which in turn implies that n(Lγ) = 2 for any γ 6= 0. Since the wave is spectrally stable one furtherconcludes that for each fixed γ 6= 0 there are precisely two eigenvalues with negative Krein sign.
For a given γ ∈ Q let n ∈ N be the minimal integer such that nγ = 2`π for minimal ` ∈ N. By usingEq. (4.9) it is straightforward to show that∫ L
−LZ∗L2,γZ dx =
1n
∫ nL
−nLW ∗L2W dx.
Since K2(λ2) > 0 for all λ2 ∈ σ(JL2), and since for the given n associated with γ one has that σ(JγL2,γ) ⊂σ(JL2), one concludes from [19, Theorem 2.13] that for each γ ∈ Q,
n(L2,γ) = kr(γ) + kc(γ) + k−i (γ) = 0.
In other words, for each γ ∈ Q one has σ(L2,γ) ⊂ R+. Since the bands are continuous as a function ofthe exponent γ, and since the rational exponents are dense as a subset of all of the exponents, one canthen conclude that σ(L2) ⊂ R+ ∪ 0 (see Figure 4). Note that by Eq. (2.24) this necessarily implies thatσ(L2|H1) ⊂ R+.
We are now ready to argue that the periodic wave is orbitally stable in L2per([−nL, nL]) for any n ∈ N.
Before proceeding, we need the following paraphrase of the theoretical results presented in [26] as appliedto our problem:
Lemma 4.1 (Maddocks/Sachs). Consider the eigenvalue problem JL2|H1w = λw. Suppose that mg(0) = 1and ma(0) = 2, and further suppose that k−r = kr = kc = 0. Then there is a Lyapunov function for whichthe wave is an unconstrained minimum, and consequently the wave is orbitally stable for the KdV flow.

B. Deconinck and T. Kapitula 21
0 0
σ(L) σ(L2)
Figure 4: (color online) σ(L) in the left panel and σ(L2) in the right panel for c1 satisfyingEq. (4.8).
Remark 4.2. It needs to be noted that in [26] the condition that the wave be an unconstrained minimum isthat 〈w,L2w〉 > 0 for w ∈ gker(L2)⊥. As a consequence of the results presented in Section 2, as well as [19],it is known that this condition is equivalent to k−r = kr = kc = 0. Furthermore, while the results presentedin [26] are applied to N -solitons for KdV, the underlying theoretical ideas are general and actually apply tomany integrable systems (e.g., see [20, Theorem 1.5]).
With respect to the problem at hand we just showed that σ(L2|H1) ⊂ R+; hence, by Theorem 2.5 onehas kr = kc = k−i = 0 for σ(JL2|H1) on L2
per([−nL, nL]) (n(D) is necessarily null since the right-hand sidemust be nonnegative). Thus, all that remains is to determine the nature of the spectrum at the origin. Firstconsider mg(0). One can check that ker(L2) = ker(L), so that for L2, mg(0) = 1. Upon following a similarargument as that which leads to Lemma 3.1, one can construct a function, say F2(λ), similar in nature tothat of F (λ) given in Eq. (3.10). In particular, one has ker(L2) = ker(L2|H1) if and only if F2(0) 6= 0. Sinceσ(L2) ⊂ R+ it immediately follows that F2(0) > 0. Now consider the algebraic multiplicity, and let u be thesolution to
JL2|H1u = U ′ ⇐⇒ L2|H1u = U − U.
Since σ(L2|H1) ⊂ R+ and u ∈ ker(L2|H1)⊥, it follows that
〈u,L1|H1u〉 > 0.
Upon applying the Fredholm alternative one sees that ma(0) = 2. Thus, the spectral condition at the originis verified, and we conclude with:Theorem 4.3. Consider the solution Uµ(x) = 6µ2k cn2(µx, k) on the space L2
per([−nK(k)/µ, nK(k)/µ]; R)endowed with the natural inner-product, where n ∈ N is given. For a given ε > 0 sufficiently small there isa δ > 0 such that if ‖v − Uµ‖ < δ with v = Uµ, then
infω∈R‖v(t)− Uµ(·+ ω)‖ < ε.
Thus, the cnoidal wave solution of the KdV equation is orbitally stable with respect to subharmonic pertur-bations.
References
[1] J. Angulo. Non-linear stability of periodic travelling wave solutions to the Schrodinger and the modifiedKorteweg-de Vries equations. J. Diff. Eq., 235:1–30, 2007.
[2] J. Angulo and J. Quintero. Existence and orbital stability of cnoidal waves for a 1D Boussinesq equation. Int.J. Math. and Math. Sci., 2007:52020, 2007.
[3] J. Angulo, J. Bona, and M. Scialom. Stability of cnoidal waves. Adv. Diff. Eq., 11:1321–1374, 2006.
[4] T. Benjamin. Lectures on nonlinear wave motion. In Nonlinear wave motion (Proc. AMS-SIAM Summer Sem.,Clarkson Coll. Tech., Potsdam, N.Y., 1972), volume 15 of Lectures in Appl. Math., pages 3–47. Amer. Math.Soc., 1974.
[5] J. Bona, P. Souganidis, and W. Strauss. Stability and instability of solitary waves of Korteweg-de Vries type.Proc. R. Soc. London A, 411:395–412, 1987.

Stability of periodic waves to KdV 22
[6] N. Bottman and B. Deconinck. KdV cnoidal waves are linearly stable. Preprint.
[7] J. Bronski and M. Johnson. The modulational instability for a generalized KdV equation. arXiv:0809.4402v3,2008.
[8] J. Carter, B. Deconinck, F. Kiyak, and J.N. Kutz. SpectrUW: a laboratory for the numerical exploration ofspectra of linear operators. Math. Comp. Sim., 74:370–379, 2007.
[9] M. Chugunova and D. Pelinovsky. Count of eigenvalues in the generalized eigenvalue problem. Preprint.
[10] J. Colliander, M. Keel, G. Staffilani, H. Takaoka, and T. Tao. Sharp global well-posedness for KdV and modifiedKdV on R and T. J. American Math. Soc., 16(3):705–749, 2003.
[11] B. Deconinck and J.N. Kutz. Computing spectra of linear operators using Hill’s method. J. Comp. Physics,219:296–321, 2006.
[12] A. Doelman, R. Gardner, and T. Kaper. Stability analysis of singular patterns in the 1-D Gray-Scott model I:a matched asymptotics approach. Physica D, 122(1–4):1–36, 1998.
[13] A. Doelman, R. Gardner, and T. Kaper. A stability index analysis of the 1-D Gray-Scott model. Memoirs AMS,155(737), 2002.
[14] F. Finkel, A. Gonzalez-Lopez, and M. Rodrıguez. A new algebraization of the Lame equation. J. Phys. A:Math. Gen., 33:1519–1542, 2000.
[15] T. Gallay and M. Haragus. Orbital stability of periodic waves for the nonlinear Schrodinger equation. J. Dyn.Diff. Eqns., 19:825–865, 2007.
[16] T. Gallay and M. Haragus. Stability of small periodic waves for the nonlinear Schrodinger equation. J. Diff.Eq., 234:544–581, 2007.
[17] R. Gardner. Spectral analysis of long wavelength periodic waves and applications. J. Reine Angew. Math., 491:149–181, 1997.
[18] M. Grillakis, J. Shatah, and W. Strauss. Stability theory of solitary waves in the presence of symmetry, II.Journal of Functional Analysis, 94:308–348, 1990.
[19] M. Haragus and T. Kapitula. On the spectra of periodic waves for infinite-dimensional Hamiltonian systems.Physica D, 237(20):2649–2671, 2008.
[20] T. Kapitula. On the stability of N -solitons in integrable systems. Nonlinearity, 20(4):879–907, 2007.
[21] T. Kapitula, K. Law, and P. Kevrekidis. Interaction of excited states in two-species Bose-Einstein condensates:a case study. (submitted).
[22] T. Kapitula, P. Kevrekidis, and B. Sandstede. Counting eigenvalues via the Krein signature in infinite-dimensional Hamiltonian systems. Physica D, 195(3&4):263–282, 2004.
[23] T. Kapitula, J. N. Kutz, and B. Sandstede. The Evans function for nonlocal equations. Indiana U. Math. J.,53(4):1095–1126, 2004.
[24] T. Kapitula, P. Kevrekidis, and B. Sandstede. Addendum: Counting eigenvalues via the Krein signature ininfinite-dimensional Hamiltonian systems. Physica D, 201(1&2):199–201, 2005.
[25] P. Lax. Periodic solutions of the KdV equation. Comm. Pure Appl. Math., 28:141–188, 1975.
[26] J. Maddocks and R. Sachs. On the stability of KdV multi-solitons. Comm. Pure Appl. Math., 46:867–901, 1993.
[27] W. Magnus and S. Winkler. Hill’s Equation, volume 20 of Interscience Tracts in Pure and Applied Mathematics.Interscience Publishers, Inc., 1966.
[28] H. McKean. Stability for the Korteweg-de Vries equation. Comm. Pure Appl. Math., 30:347–353, 1977.
[29] R. Pego and M. Weinstein. Eigenvalues, and instabilities of solitary waves. Phil. Trans. R. Soc. Lond. A, 340:47–94, 1992.

B. Deconinck and T. Kapitula 23
[30] J. Rademacher, B. Sandstede, and A. Scheel. Computing absolute and essential spectra using continuation.Physica D, 229(1&2):166–183, 2007.
[31] B. Sandstede and A. Scheel. On the stability of travelling waves with large spatial period. J. Diff. Eq., 172:134–188, 2001.