On Fading Broadcast Channels with Partial Channel State ...
5
On Fading Broadcast Channels with Partial Channel State Information at the Transmitter Ravi Tandon 1 , Mohammad Ali Maddah-Ali 2 , Antonia Tulino 2 , H. Vincent Poor 1 , and Shlomo Shamai 3 1 Dept. of Electrical Engineering, Princeton University, Princeton, NJ, USA. 2 Bell Laboratories (Alcatel-Lucent), Holmdel, NJ, USA. 3 Dept. of Electrical Engineering, Technion, Israel Institute of Technology, Haifa, Israel Abstract—The two user multiple-input multiple-output (MIMO) broadcast channel is studied in which the channel from one of the receivers is known instantaneously and perfectly at the transmitter, whereas the channel from the other receiver is known in a delayed manner. The degrees of freedom (DoF) region of the two-user (M,N1,N2)- MIMO broadcast channel under this model is completely characterized. The scheme illustrates the joint utilization of current and past knowledge of the channel state information at the transmitter. I. I NTRODUCTION A typical assumption while studying fading broadcast and interference networks is the instantaneous availability of the global channel state information at the transmitter (CSIT). However, in practical scenarios, this assumption is not well justified since the channels are usually estimated at the re- ceivers, and then fed back to the transmitter. It is therefore of utmost importance to understand the fundamental performance limits of fading networks under the assumption of delayed CSIT. To this end, we consider the two-user multiple-input multiple-output (MIMO) broadcast channel (BC) with fast fad- ing, in which the channels to the receivers change identically and independently over time. As a starting motivation, consider the two-user multiple- input single-output (MISO) broadcast channel, with two trans- mit antennas and two single antenna receivers. Under the perfect CSIT assumption, two degrees of freedom (DoF) can be achieved via zero-forcing beamforming [1]. However, under the no CSIT assumption, the optimal sum DoF collapses to one [2], [3]. Rather surprisingly, Maddah-Ali and Tse showed in [4] that under the delayed CSIT assumption, the optimal sum DoF is 4/3, i.e., completely outdated CSIT can provide DoF gains. The interesting aspect of this result is the utilization of side information at the receivers via feedback. All of these problems consider situations that do not distinguish the relative form of CSIT from the point of view of the receivers, i.e., CSIT is either perfect or delayed or absent from both of the receivers. The research of H. V. Poor and R. Tandon was supported by the Air Force Office of Scientific Research MURI Grant FA-9550- 09-1-0643. The work of S. Shamai was supported by the Is- rael Science Foundation (ISF), and the Philipson Fund for Electrical Power. E-mail: {rtandon, poor}@princeton.edu, {mohammadali.maddah- ali,a-tulino}@alcatel-lucent.com, [email protected]. Recently, an interesting model has been investigated for the two-user MISO BC [5], [6], in which the channel to each receiver has two components: one component is available in- stantaneously at the transmitter, whereas the other component is available after unit delay. Depending on the relative amount of perfect versus delayed CSIT, which is quantified by a parameter ↵ 2 [0, 1], it is shown that the optimal sum DoF for this model is (4+2↵)/3. When ↵ =1, which corresponds to the case of full instantaneous CSIT, one obtains 2 DoF, whereas in the other extreme when ↵ =0, the result of 4/3 with fully delayed CSIT is recovered. Another feasible scenario could be one in which the channel to one of the receivers (say receiver 1) is available perfectly at the transmitter; whereas the channel to receiver 2 is available in a delayed manner. This situation can arise if receiver 1 is operating in a controlled environment and the delay in the feedback is insignificant; whereas the feedback channel from receiver 2 suffers significant delay. We call this model as one with partially perfect CSIT. In particular, we consider the case in which there are M -transmit antennas, and two receivers, with N 1 and N 2 receive antennas respectively. The partial CSIT assumption is as follows: the channel to receiver 1 is available instantaneously and perfectly; the channel to receiver 2 is available in a delayed manner. The main contribution of this work is the characterization of the DoF region of the (M,N 1 ,N 2 )-MIMO BC with partially perfect CSIT. As a comparison to 4/3 (optimal sum DoF for (2, 1, 1)- MISO BC under delayed CSIT), we show that under the partial CSIT assumption, the optimal sum DoF increases to 3/2. The main idea behind the scheme is the joint utilization of two resources: a) the instantaneous knowledge of the channel to receiver 1 via zero-forcing beamforming; and b) the delayed channel knowledge of receiver 2 to use side-information at receiver 2. We also remark here that the case of (2, 1, 1)-MISO BC has also been treated in [7], where the optimal sum DoF of 3/2 is reported. II. TWO- USER MIMO BC WITH PARTIALLY PERFECT CSI We consider the two-user (M,N 1 ,N 2 )-MIMO broadcast channel with fast fading, in which the channel outputs at the 978-1-4673-0762-8/12/$31.00 ©2012 IEEE 1004
Transcript of On Fading Broadcast Channels with Partial Channel State ...

On Fading Broadcast Channels with Partial ChannelState Information at the Transmitter
Ravi Tandon1, Mohammad Ali Maddah-Ali2, Antonia Tulino2, H. Vincent Poor1, and Shlomo Shamai3
1Dept. of Electrical Engineering, Princeton University, Princeton, NJ, USA.2Bell Laboratories (Alcatel-Lucent), Holmdel, NJ, USA.
3Dept. of Electrical Engineering, Technion, Israel Institute of Technology, Haifa, Israel
Abstract—The two user multiple-input multiple-output(MIMO) broadcast channel is studied in which the channel fromone of the receivers is known instantaneously and perfectly at thetransmitter, whereas the channel from the other receiver is knownin a delayed manner. The degrees of freedom (DoF) region ofthe two-user (M,N1, N2)� MIMO broadcast channel under thismodel is completely characterized. The scheme illustrates thejoint utilization of current and past knowledge of the channelstate information at the transmitter.
I. INTRODUCTION
A typical assumption while studying fading broadcast andinterference networks is the instantaneous availability of theglobal channel state information at the transmitter (CSIT).However, in practical scenarios, this assumption is not welljustified since the channels are usually estimated at the re-ceivers, and then fed back to the transmitter. It is therefore ofutmost importance to understand the fundamental performancelimits of fading networks under the assumption of delayedCSIT. To this end, we consider the two-user multiple-inputmultiple-output (MIMO) broadcast channel (BC) with fast fad-ing, in which the channels to the receivers change identicallyand independently over time.
As a starting motivation, consider the two-user multiple-input single-output (MISO) broadcast channel, with two trans-mit antennas and two single antenna receivers. Under theperfect CSIT assumption, two degrees of freedom (DoF) canbe achieved via zero-forcing beamforming [1]. However, underthe no CSIT assumption, the optimal sum DoF collapsesto one [2], [3]. Rather surprisingly, Maddah-Ali and Tseshowed in [4] that under the delayed CSIT assumption, theoptimal sum DoF is 4/3, i.e., completely outdated CSIT canprovide DoF gains. The interesting aspect of this result is theutilization of side information at the receivers via feedback. Allof these problems consider situations that do not distinguishthe relative form of CSIT from the point of view of thereceivers, i.e., CSIT is either perfect or delayed or absent fromboth of the receivers.
The research of H. V. Poor and R. Tandon was supported bythe Air Force Office of Scientific Research MURI Grant FA-9550-09-1-0643. The work of S. Shamai was supported by the Is-rael Science Foundation (ISF), and the Philipson Fund for ElectricalPower. E-mail: {rtandon, poor}@princeton.edu, {mohammadali.maddah-ali,a-tulino}@alcatel-lucent.com, [email protected].
Recently, an interesting model has been investigated for thetwo-user MISO BC [5], [6], in which the channel to eachreceiver has two components: one component is available in-stantaneously at the transmitter, whereas the other componentis available after unit delay. Depending on the relative amountof perfect versus delayed CSIT, which is quantified by aparameter ↵ 2 [0, 1], it is shown that the optimal sum DoFfor this model is (4+2↵)/3. When ↵ = 1, which correspondsto the case of full instantaneous CSIT, one obtains 2 DoF,whereas in the other extreme when ↵ = 0, the result of 4/3with fully delayed CSIT is recovered.
Another feasible scenario could be one in which the channelto one of the receivers (say receiver 1) is available perfectly atthe transmitter; whereas the channel to receiver 2 is availablein a delayed manner. This situation can arise if receiver 1 isoperating in a controlled environment and the delay in thefeedback is insignificant; whereas the feedback channel fromreceiver 2 suffers significant delay. We call this model as onewith partially perfect CSIT. In particular, we consider the casein which there are M -transmit antennas, and two receivers,with N1 and N2 receive antennas respectively. The partialCSIT assumption is as follows: the channel to receiver 1 isavailable instantaneously and perfectly; the channel to receiver2 is available in a delayed manner. The main contribution ofthis work is the characterization of the DoF region of the(M,N1, N2)-MIMO BC with partially perfect CSIT.
As a comparison to 4/3 (optimal sum DoF for (2, 1, 1)-MISO BC under delayed CSIT), we show that under the partialCSIT assumption, the optimal sum DoF increases to 3/2. Themain idea behind the scheme is the joint utilization of tworesources: a) the instantaneous knowledge of the channel toreceiver 1 via zero-forcing beamforming; and b) the delayedchannel knowledge of receiver 2 to use side-information atreceiver 2. We also remark here that the case of (2, 1, 1)-MISOBC has also been treated in [7], where the optimal sum DoFof 3/2 is reported.
II. TWO-USER MIMO BC WITH PARTIALLY PERFECT CSI
We consider the two-user (M,N1, N2)-MIMO broadcastchannel with fast fading, in which the channel outputs at the
978-1-4673-0762-8/12/$31.00 ©2012 IEEE 1004

Tx
W2
W1
Rx2
H1
(t)
H2
(t)
(W1
, W2
)
H1
(t) Rx1
H(t�1)
2
Delayed CSI
Perfect CSI
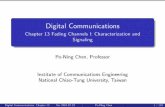
Fig. 1. The MIMO broadcast channel with partially perfect CSI.
receivers are given as follows:
Y1(t) = H1(t)X(t) + Z1(t)
Y2(t) = H2(t)X(t) + Z2(t),
where X(t) is the transmitted signal; H1(t) 2 CN1⇥M
denotes the channel between the transmitter and receiver 1;H2(t) 2 CN2⇥M denotes the channel between the transmitterand receiver 2; and Zj(t) ⇠ CN (0, INj ), for j = 1, 2, isthe additive noise at receiver j. The power constraints at thetransmitter is given as E||X(t)||2 P , for 8 t. It is assumedthat the components [Hj ]nj ,m are statistically equivalent forall m 2 {1, . . . ,M}, and nj 2 {1, . . . , Nj}, for j = 1, 2.
We focus on the MIMO-BC model under the followingassumptions (see Figure 1):
• H1(t) is available instantaneously at the transmitter;• H2(t) is available at the transmitter in a delayed manner.
Furthermore, it is assumed that both receivers have globalchannel state information (CSI). We denote the transmitter byTx and the receivers by Rx1 and Rx2. A coding scheme withblock length T for the MIMO BC with partial CSIT consistsof a sequence of encoding functions
X(t) = ft�
W1,W2,Ht1,H
t�12
�
,
defined for t = 1, . . . , T , and two decoding functions
ˆWj = gTj (Y Tj ,HT
1 ,HT2 ), for j = 1, 2.
A rate pair (R1(P ), R2(P )) is achievable if there exists asequence of coding schemes such that P(Wj 6= ˆWj) ! 0 asT ! 1 for j = 1, 2. The capacity region C(P ) is defined asthe set of all achievable rate pairs (R1(P ), R2(P )). We definethe DoF region as follows:
D =
n
(d1, d2)
�
�
�
�
dj � 0, and 9(R1(P ), R2(P )) 2 C(P )
s.t. dj = lim
P!1
Rj(P )
log2(P )
, j = 1, 2o
.
We state our main result in the following theorem:Theorem 1: The DoF region of the (M,N1, N2)-MIMO
broadcast channel with perfect CSI from receiver 1 and
delayed CSI from receiver 2 is given by
d1 min(M,N1) (1)d1
min(M,N1 + N2)+
d2min(M,N2)
1. (2)
To put this result into perspective, we also recall the DoFregions with perfect CSI of both receivers and with delayedCSI [4], [8] from both receivers.
• DoF region with perfect CSI from both receivers:
d1 min(M,N1) (3)d2 min(M,N2) (4)
d1 + d2 min(M,N1 + N2). (5)
• DoF region with delayed CSI from both receivers:
d1min(M,N1 + N2)
+
d2min(M,N2)
1 (6)
d1min(M,N1)
+
d2min(M,N1 + N2)
1. (7)
As a comparison with the result in [8] for delayed CSI fromboth receivers, we note from Theorem 1 that the constraintin (7) becomes redundant and the single user constraintd1 min(M,N1) becomes active. In the next section, wefirst highlight the coding scheme through an example, whichshows that zero-forcing pre-coding along with utilization ofside-information are jointly required to achieve the optimalDoF region.
III. (2, 1, 1)-MISO BC WITH PARTIALLY PERFECT CSI
To illustrate the main idea behind the coding scheme,we first focus on the (2, 1, 1)-MISO BC. We assume thatinstantaneous CSI corresponding to receiver 1 is availableat the encoder and the CSI corresponding to receiver 2 isavailable in a delayed manner. For this example, the DoFregion in Theorem 1 simplifies to
d1 1 (8)d12
+ d2 1. (9)
From Figure (2), it is clear that to show the achievabil-ity of the DoF region above, we need to show that thepair (d1, d2) = (1, 1/2) is achievable under the assumptionof partial perfect CSI. The remaining region is achievableby time-sharing between this point and the corner points(1, 0) and (0, 1). Henceforth, we focus on achieving the pair(d1, d2) = (1, 1/2).
A. Achieving (1, 1/2) for (2, 1, 1)-MISO BC
The scheme works over two channel uses, in which we willshow reliable transmission of two symbols (u1, u2) to Rx1
and one information symbol v to Rx2. In the first channeluse, knowing the channel to Rx1, the transmitter can zero-force the interference caused by the v symbols at Rx1. At
2
1005

1
(1, 12)
(23,
23)
Perfect CSI
d1
d2
1
Delayed CSI
Partially Perfect CSI
No CSI
Fig. 2. DoF regions for the (2, 1, 1) MISO broadcast channel.
t = 1, the transmitter sends
X(1) =
u1
u2
�
+ Bv. (10)
The output at Rx1 (ignoring noise) is given as
Y1(1) = H1(1)X(1) (11)
= H1(1)
u1
u2
�
+ H1(1)Bv (12)
= H1(1)
u1
u2
�
(13)
, L(u1, u2), (14)
where (13) follows from the fact that the 2 ⇥ 1 vector B ischosen such that H1(1)B = 0, i.e., in the first channel use, thetransmitter uses zero-forcing so as to not cause interference atreceiver 1 by using its perfect knowledge of H1(1).
The output at Rx2 (ignoring noise) is given by
Y2(1) = H2(1)X(1) (15)
= H2(1)
u1
u2
�
+ H2(1)Bv (16)
= I(u1, u2) + H2(1)Bv. (17)
After t = 1, having access to delayed CSI, i.e., H2(1), thetransmitter can reconstruct the interference caused at Rx2,i.e., I(u1, u2).
At t = 2, it sends this reconstructed interference (which isa scalar for this example) on one of the antennas:
X(2) =
I(u1, u2)
�
�
. (18)
After t = 2, both Rx1 and Rx2 have access to I(u1, u2).Using L(u1, u2) and I(u1, u2), receiver 1 can reliably decodethe two information symbols (u1, u2). Having I(u1, u2), re-ceiver 2 can cancel this interference from Y2(1) and decodev reliably via channel inversion. Hence, the pair (1, 1/2) isachievable.
M � N1
N1
N1 M N2
M
Delayed CSI
M
d2
d1
Perfect CSI
Partially Perfect CSI=
(N1, M � N1)
Fig. 3. DoF regions for N1 M N2
IV. CODING SCHEME: ARBITRARY (M,N1, N2)
We present encoding schemes depending on the relativevalues of (M,N1, N2). We first focus on cases in whichN1 N2.
A. M N1 N2
For this case, the DoF regions for perfect, delayed andpartially perfect settings are the same and are given by d1 +
d2 M . This region is trivially achievable by time-sharingbetween the points (d1, d2) = (M, 0) and (0,M) respectively.
B. N1 < M N2
In this case, the DoF region with partially perfect CSI isthe same as that with perfect CSI, and is given by
d1 N1, d1 + d2 M (19)
whereas the region with delayed CSI is given by
d1N1
+
d2M
1. (20)
Figure 3 shows the typical DoF regions when N1 < M N2.To show the achievability of the region with partially perfectCSI, we need to show the achievability of the pair (N1,M �N1). This is feasible by zero-forcing the interference at Rx1
alone, and without any CSI (not even delayed) from Rx2. Thisis because Rx2 has enough antennas (N2 � M ) to decode allM information symbols.
C. N1 N2 M (N1 + N2)
The (achievable) DoF region with partially perfect CSI is
d1 N1 (21)d1M
+
d2N2
1. (22)
The DoF region with delayed CSI is
d1N1
+
d2M
1,d1M
+
d2N2
1. (23)
3
1006

Perfect CSI
N1
N1 N2 M (N1 + N2)
MN2
Partially Perfect CSI
Delayed CSI
N1
N2
M
d2
d1
⇣
N1, N2 ·⇣
M�N1M
⌘⌘
Fig. 4. DoF regions for N1 N2 M (N1 +N2)
Figure 4 shows the typical DoF regions for this case. To showthe achievability of the region with partially perfect CSI, weneed to show the achievability of the pair
(d1, d2) =
✓
N1, N2 ·✓
M �N1
M
◆◆
. (24)
In order to show this, we show that over M channel uses, it ispossible to transmit MN1 symbols to Rx1 and N2(M �N1)
symbols to Rx2. Let us denote by
u = [u1, . . . , uMN1 ]T (25)
the vector of information symbols intended for Rx1, and by
v = [v1, . . . , vN2(M�N1)]T (26)
the vector of information symbols intended for Rx2.The scheme operates over two phases. Phase 1 is of duration
N1, whereas phase 2 is of duration (M �N1). During phase1, the transmitter sends
X(t) = S(t)u + B(t)v (27)
where S(t) (chosen as full rank) is of size M⇥MN1, and B(t)is of size M ⇥N2(M �N1). The matrix B(t) is selected tozero-force the interference caused by v-symbols at Rx1, i.e.,the matrix B(t) is selected to satisfy
H1(t)B(t) = [0]N1⇥N2(M�N1), for t = 1, . . . , N1. (28)
The channel outputs in this phase are
Y1(t) = H1(t)S(t)u
Y2(t) = H2(t)S(t)u + H2(t)B(t)v, for t = 1, . . . , N1.
Therefore, at the end of this phase, Rx1 has N21 equations
in MN1 u-variables. Therefore, to decode the informationsymbol vector u, Rx1 requires additional N1(M � N1)
linearly independent equations in u-variables.On the other hand, Rx2 has N1N2 equations in N2(M �
N1) v-variables and N1N2 interference variables (each ofwhich is a linear combination of u-symbols). Having accessto delayed CSI from Rx2, {H2(t)}N1
t=1, the transmitter canreconstruct {H2(t)S(t)u}N1
t=1; hence it can reconstruct theseN1N2 interference symbols. It then creates N1(M � N1)
linearly independent combinations of these N1N2 interferencesymbols. This is feasible since M (N1 + N2). We denotethese linear combinations of the interference variables by
I = [i1, . . . , iN1(M�N1)]T . (29)
In phase 2, which is of duration (M �N1), the transmittersends
X(t) =
˜S(t)I + B(t)v, (30)
where ˜S(t) (chosen as full rank) is of size M ⇥N1(M �N1),and the matrix B(t) is selected to satisfy
H1(t)B(t) = [0]N1⇥N2(M�N1), for t = N1 + 1, . . . ,M.(31)
The channel outputs for this phase are
Y1(t) = H1(t) ˜S(t)I
Y2(t) = H2(t) ˜S(t)I + H2(t)B(t)v, for t = N1 + 1, . . . ,M.
Thus, at the end of phase 2, Rx1 has a total of N21 +
(M �N1)N1 = MN1 equations in MN1 u-variables, whichcan be decoded successfully. At Rx2, there are a total ofN1N2 + N2(M � N1) = MN2 equations in N2(M � N1)
v-variables, and N1N2 interference variables. Thus, it cansuccessfully decode the v information symbols.
D. N1 N2 (N1 + N2) M
The encoding scheme for this case follows in a similarmanner as in the previous case and is therefore omitted. Thedifference comes only in phase 2, where the transmitter candirectly use the N1N2 interference symbols (suffered at Rx2
to be used for subsequent transmission).Remark 1: We now emphasize the key features of the
encoding scheme for the case in which N1 N2 M (N1 + N2). The first feature is the use of zero-forcing in thefirst phase to nullify interference caused at Rx1. Furthermore,depending on the relative values of (M,N1, N2), zero-forcingis also required in general during phase 2. To understand thiscarefully, if we revisit the encoding scheme for the (2, 1, 1)-MISO BC, for which we showed the achievability of (1, 1/2),phase 2 does not require zero-forcing. This is because inphase 1, enough linear combinations of useful symbols areavailable at Rx2 (even though these symbols are corrupted byinterference). Hence, depending on N1 ? (M �N1), we mayor may not require zero-forcing during phase 2. To be precise,for the cases in which N1 � (M � N1), only interferenceforwarding suffices which simplifies the encoding scheme, andwhich is indeed the case for the (2, 1, 1)-MISO BC.
4
1007

V. CONVERSE PROOF
The bound d1 min(M,N1) is trivial, hence we focus onshowing that
d1min(M,N1 + N2)
+
d2min(M,N2)
1. (32)
To this end, let us consider a matrix { eH(t)}Tt=1, where
eH(t) 2 Cmin(M,N1+N2)⇥M (33)
span(
eH(t)) = span⇥
H1(t),H2(t)⇤T
, (34)
and, { eH(t)}Tt=1, {H1(t)}Tt=1, and {H2(t)}Tt=1 are mutuallyindependent.
Now, consider the following artificial channel output:
eY (t) =
eH(t)X(t) +
˜Z(t), (35)
where ˜Z(t) ⇠ CN (0, Imin(M,N1+N2)), and is independentof all other random variables in the model. In addition, weassume that { eH(t)}Tt=1 is available at both receivers, but notavailable at the transmitter.
Consider the original broadcast channel (OBC):• Channel outputs: Y1 at Rx1, Y2 at Rx2.• CSI at Tx: H1 instantaneous, H2 delayed.• CSI at Rx1,Rx2: H1,H2 instantaneous.
For simplicity, we have dropped the index (t) in the rest of thissection. We next enhance OBC to create a physically degradedbroadcast channel (DBC):
• Channel outputs: (Y1, Y2) at Rx1, Y2 at Rx2.• CSI at Tx: H1 instantaneous, H2 delayed.• CSI at Rx1,Rx2: H1,H2 instantaneous.
Using the fact that feedback does not increase the capacityregion of a physically degraded broadcast channel [9], we candrop the assumption of delayed CSI of H2 without changingthe capacity region of DBC. We denote the new channel asDBC⇤:
• Channel outputs: (Y1, Y2) at Rx1, Y2 at Rx2.• CSI at Tx: H1 instantaneous, H2-unknown.• CSI at Rx1,Rx2: H1,H2 instantaneous.We further enhance DBC⇤ by giving the artificial output
eY (as defined in (35)) to receiver 1. We denote the resultingchannel as DBC⇤⇤:
• Channel outputs: (Y1, Y2, eY ) at Rx1, Y2 at Rx2.• CSI at Tx: H1 instantaneous, (
eH,H2)-unknown.• CSI at Rx1,Rx2: H1,H2, eH1 instantaneous.We now focus on the channel DBC⇤⇤, and observe that from
(34), by construction, the row-span of eH equals the row-spanof (H1,H2). Therefore, (Y1, Y2) can be reconstructed from eYand (H1,H2, eH) within noise-distortion.
Thus, from the above argument, the DoF region of DBC⇤⇤
is the same as that of DBC⇤⇤⇤:• Channel outputs: eY at Rx1, Y2 at Rx2.• CSI at Tx: H1 instantaneous, (
eH,H2)-unknown.• CSI at Rx1,Rx2: H1,H2, eH instantaneous.
In this final channel DBC⇤⇤⇤, the channel gains of (Y2, eY ) areunknown at the transmitter. Moreover we have a broadcastchannel with min(M,N1 + N2) antennas at Rx1 and N2
antennas at Rx2. Moreover, for the two-user (M,N1, N2)-MIMO broadcast channel with no CSI at the transmitter, thedegrees of freedom region is given as [2], [3]
d1min(M,N1)
+
d2min(M,N2)
1. (36)
Using (36) for DBC⇤⇤⇤, we arrive at the desired bound:
d1min(M,N1 + N2)
+
d2min(M,N2)
1. (37)
This completes the proof for the converse.
VI. CONCLUSIONS
The DoF region of the two-user MIMO BC has beencharacterized under the assumption of instantaneous CSITfrom one receiver and delayed CSIT from the other receiver.We are also investigating extensions of this work to K-userMISO broadcast channels. In particular, for the K-user MISOBC, there can be perfect CSIT from k receivers and delayedCSIT from (K � k) receivers, i.e., this formulation leads to atotal of (K + 1) different CSIT configurations, out of whichonly two configurations are fully understood, corresponding toeither perfect CSIT from every receiver (k = K) or delayedCSIT from every receiver (k = 0) [4].
VII. ACKNOWLEDGEMENT
The authors would like to express our sincere gratitudeto Dr. Syed A. Jafar for helpful comments which led tostrengthening of the results in this paper.
REFERENCES
[1] G. Caire and S. Shamai. On the achievable throughput of a multiantennaGaussian broadcast channel. IEEE Trans. Inform. Theory, 49(7):1691–1706, Jul. 2003.
[2] C. Huang, S. A. Jafar, S. Shamai, and S. Viswanath. On degrees offreedom region of MIMO networks without channel state information attransmitters. IEEE Trans. Inform. Theory, 58(2):849–857, Feb. 2012.
[3] C. S. Vaze and M. K. Varanasi. The degrees of freedom regions ofMIMO broadcast, interference, and cognitive radio channels with noCSIT, [arXiv: 0909.5424]. Submitted to IEEE Trans. Inform. Theory,Sep. 2009.
[4] M. A. Maddah-Ali and D. Tse. Completely stale transmitter channel stateinformation is still very useful. IEEE Trans. Trans. Theory, 58(7):4418–4431, Jul. 2012.
[5] S. Yang, M. Kobayashi, D. Gesbert, and X. Yi. Degrees of freedomof time correlated MISO broadcast channel with delayed CSIT, [arXiv:1203.2550]. Submitted to IEEE Trans. Inform. Theory, Mar. 2012.
[6] T. Guo and S. A. Jafar. Optimal use of current and outdated channel stateinformation — degrees of freedom of the MISO BC with mixed CSIT,[arXiv: 1203.1301]. Mar. 2012.
[7] H. Maleki, S. A. Jafar, and S. Shamai. Retrospective interferencealignment over interference networks. IEEE Journal of Selected Topicsin Signal Processing, 6(3):228–240, Jun. 2012.
[8] C. S. Vaze and M. K. Varanasi. The degrees of freedom regions of two-user and certain three-user MIMO broadcast channels with delayed CSIT[arXiv: 1101.0306v2]. Submitted to IEEE Trans. Inform. Theory, Dec.2011.
[9] A. El Gamal. The feedback capacity of degraded broadcast channels.IEEE Trans. Inform. Theory, 24(3):379–381, May 1978.
5
1008












![[PPT]Wireless Channels: Small Scale Fading (Multipath …web2.uwindsor.ca/.../uwireless/channels_smallscalefading.ppt · Web viewWireless Channels: Small Scale Fading (Multipath and](https://static.fdocuments.us/doc/165x107/5b3cfdd57f8b9a0e628df536/pptwireless-channels-small-scale-fading-multipath-web2-web-viewwireless.jpg)