On composing a resilient tree in a communication network with intermittent connections based on...
19
Soka University On composing a resilient tree in a communication network with intermittent connections based on stress centrality Genya Ishigaki Norihiko Shinomiya ISCC 2016 June 29, 2016
-
Upload
genya-ishigaki -
Category
Science
-
view
34 -
download
0
Transcript of On composing a resilient tree in a communication network with intermittent connections based on...

Soka University
On composing a resilient tree in acommunication network with intermittentconnections based on stress centrality
Genya IshigakiNorihiko Shinomiya
ISCC 2016
June 29, 2016

1. Introduction: Assumed Environment
Disruption Tolerant Networking (DTN)
! communications in a challenging environment (Wei et al., 2014)! communications under huge disasters (vehicle, drone networks)! networks in communication challenged regions
! no guarantee of end-to-end paths between communication nodes(intermittent connections) (Fall, 2003)
(Internet.org, NTT docomo)2

1. Introduction: Assumed Environment
Disruption Tolerant Networking (DTN)
! communications in a challenging environment (Wei et al., 2014)! communications under huge disasters (vehicle, drone networks)! networks in communication challenged regions
! no guarantee of end-to-end paths between communication nodes(intermittent connections) (Fall, 2003)
(Internet.org, NTT docomo)3

2. Related Works: Topology Design
Maximum Reliability Tree Problem (Yoshida et al., 2010)
composing a tree maximizing the weakest path reliability
Path Reliability := the product of weights on edgesTree Reliablity (TA) := reliability of the weakest path
✓ ✏consideration ONLY to the total evaluation value✒ ✑
Soka University
3
Works on Graph Reliability
Survivable Network Design Problem (Korte, 2007) Input: weighted graph G, required connectivity c Problem: find a subgraph H of G that satisfies c and minimizes total weight
Minimum Spanning Tree problem (c = 1, H is spanning.)
consideration to relationship between location and edge reliability
Maximum Availability Tree Problem (Yoshida et al., 2010) composing a tree maximizing the weakest path reliabilityTree Availability (TA) := product of weights on edges in the weakest path
TA
0.7
0.6
0.6
0.9
0.7
0.6
0.9
0.7
0.6
0.6
0.7
0.60.9
0.6⇥ 0.7⇥ 0.9 0.6⇥ 0.6⇥ 0.7 0.6⇥ 0.7⇥ 0.9
4

3. Big Picture of this Study
The Purpose of this Study
composition of a resilient topology in a network with intermittent linksconsidering the difference on relative locations of links
1-connected (tree) 2-connected
5

3. Big Picture of this Study
The Purpose of this Study
composition of a resilient topology in a network with intermittent linksconsidering the difference on relative locations of links
What is more “resilient”?! difference among existence possibility of communication links! relative location of communication links in composed topology
6

4. Modeling: Probabilistic Aggregated Contact Graph
Contact Graph (CG) Gti
representation of connectionsbetween communication nodesat time ti
Probabilistic ACG (PACG) G′RACG assigned a probability ofconnection existence to eachedge GR = (V, ER), where
ER =!
ti∈REti
(R = {t0, t1, ..., tr})
v2 v4
v1 v3
e3
e1
e2 e4
CG at t0.
v2 v4
v1 v3
e3
e1
e2 e4
CG at t1.
v2 v4
v1 v3
e3
e1
e2 e4
CG at t2.
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
7

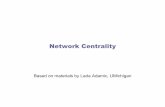
4. Modeling: Metrics on an Edge
1. Availability A(ei)
probability assigned to each edgethat shows reliability of the edge
2. Commonality comG(ei)
the number of paths sharing theedge, which indicates importance ofthe edge in a graph
comT (e1) = 3.comT (e2) = 4.comT (e3) = 3.
* vTu: the path from a vertex v to uon a tree T
Soka University
7
1. Commonality of an edgethe number of paths sharing the edge, which indicates importance of the edge in a graph
Especially, in tree,
comT (ei)
e.g.
2. Availability of an edgeprobability assigned to each edge that shows reliability of the edge
A(ei)
Metrics
topological characteristics, i.e., relative location of the edge
in a tree.
2. 1 Survivable Network Design Problem
Survivable Network Design Problem (SNDP) is extrac-
tion of subgraph H = (V (H), E(H)) from weighted graph
G = (V, E) with weight function w : E −→ R+ such that the
number of edge disjoint paths between vi and vj is greater
than and equal to a designated value pij for every pair of
vertices. Note that two paths are edge disjoint when the
paths do not share any edge in themselves. When pij = 1
for all combinations of vi, vj , the subgraph H is tree. Then,
SNDP is converted to Steiner Tree Problem, so the opti-
mum solution for SNDP is equal to minimum spanning tree
if V (H) = V .
2. 2 Maximum Availability Tree Problem
Maximum Availability Tree Problem (MATP) is pro-
pounded to construct the most reliable network in terms of
path reliability [5]. The study defines reliability of a path as
the product of weights of edges on the path. The objective
of the problem is to find a tree whose weakest path in terms
of the path reliability is the most reliable of the other trees
in a given graph. This paper also states that the desired op-
timum tree is obtained by minimum diameter spanning tree
algorithm.
3. Definitions
3. 1 Tree and Path
Tree T = (V (T ), E(T )) is a connected acyclic graph in
graph G = (V,E). When a tree covers all vertices in G
(V (T ) = V ), the tree is said spanning. Because a tree does
not contain any cycles from its definition, it is minimally
connected. In other words, only one path exists between ar-
bitrarily chosen two vertices vi, vj . The path between vi and
vj in T is denoted as viTvj .
A graph G contains different spanning trees as its sub-
graphs, so a set of all possible spanning trees in G is denoted
as TG = {Ti}.A leaf vertex li is a vertex whose degree is 1 in T , so it is
possible that a tree has many leaf vertices. One of the ver-
tices in V (T ) can be designated as root vertex r of T . Then,
the tree T is called a rooted tree and represented as T (r) to
declare the root vertex.
In a rooted tree, edges can be labeled based on the distance
from the root vertex r. The label of each edge ei is denoted
as level(ei). Figure 1 describes the level of each edge in a
rooted tree T (v1).
Any tree is classified into either centered or bicentered
trees. The (bi)center vertex γ (γ1, γ2 in the case of a bi-
centered tree) of a tree is found by continuous remove of leaf
vertices until the number of left vertices becomes less than
3. For instance, v2 is the center vertex of T (v1) in Figure 1.
3. 2 Ordered Set
A set M is said strictly ordered under binary relation <
and denoted as (M,<) when x, y, z ∈ M satisfy the follow-
ing properties.
∀x ∈ M, ¬ (x < x) (irreflexivity) (1)
x < y ⇒ ¬ (x > y) (asymmetry) (2)
x < y, y < z ⇒ x < z (transitivity) (3)
Relation < is total in the case that any pair of elements
x, y ∈ M can be compared under <. Thus, a strictly ordered
set (M,<) is called totally strictly ordered set or strict chain
when < is total.
4. Metrics
4. 1 Commonality of an Edge
Commonality of an edge comG(ej) is the number of paths
that contain edge ej in graph G. In Figure 1, comT (v1)(e4) =
5 because e4 is on path v6Tv4, v6Tv2, v6Tv5, v6Tv1, v6Tv3.
In contrast, comT (v1)(e3) = 8.
Especially, commonality of edge ej in spanning tree Ti =
(V, E(Ti)) is obtained by product of the size of two compo-
nents separated by ej . Because a tree is an acyclic graph,
deletion of any edge divides the tree into two connected
components, namely, C1(ej), C2(ej) (|C1(ej)| <= |C2(ej)| =|V |− |C1(ej)|). Note that Cp(ej) = (V (Cp(ej)), E(Cp(ej)))
is a subgraph of Ti, and its size is defined as |V (Cp(ej)|.Then, the commonality of ej is calculated as follows.
comTi(ej) := |C1(ej)|× |C2(ej)|. (4)
Equation (4) implies that commonality marks the mini-
mum value when |C1(ej)| = 1. Additionally, commonality
increases in accordance with the augmentation of |C1(ej)|and reaches the maximum value when |C1(ej)| = |C2(ej)|.This is because the two components satisfy C1(ej)∪C2(ej) =
V ∧ C1(ej)∩C2(ej) = ∅. Due to this property, topology of
a tree and locations of edges in the tree seriously influence
commonality of each edge.
4. 2 Edge Availability
In a practical network, reliability of a communications link
demonstrates the stability of the link to properly operate.
Modeling a network with a graph, each edge is assigned a
weight showing its probability not to fail. This weight is
named edge availability, A(en). Because edge availability in-
dicates a probability, edge availability in graph G = (V, E)
is formally denoted as follows.
weight function A : E −→ (0.0, 1.0] . (5)
Figure 2 is a graph G1 whose edges are assigned their avail-
ability.
— 2 —
topological characteristics, i.e., relative location of the edge
in a tree.
2. 1 Survivable Network Design Problem
Survivable Network Design Problem (SNDP) is extrac-
tion of subgraph H = (V (H), E(H)) from weighted graph
G = (V, E) with weight function w : E −→ R+ such that the
number of edge disjoint paths between vi and vj is greater
than and equal to a designated value pij for every pair of
vertices. Note that two paths are edge disjoint when the
paths do not share any edge in themselves. When pij = 1
for all combinations of vi, vj , the subgraph H is tree. Then,
SNDP is converted to Steiner Tree Problem, so the opti-
mum solution for SNDP is equal to minimum spanning tree
if V (H) = V .
2. 2 Maximum Availability Tree Problem
Maximum Availability Tree Problem (MATP) is pro-
pounded to construct the most reliable network in terms of
path reliability [5]. The study defines reliability of a path as
the product of weights of edges on the path. The objective
of the problem is to find a tree whose weakest path in terms
of the path reliability is the most reliable of the other trees
in a given graph. This paper also states that the desired op-
timum tree is obtained by minimum diameter spanning tree
algorithm.
3. Definitions
3. 1 Tree and Path
Tree T = (V (T ), E(T )) is a connected acyclic graph in
graph G = (V,E). When a tree covers all vertices in G
(V (T ) = V ), the tree is said spanning. Because a tree does
not contain any cycles from its definition, it is minimally
connected. In other words, only one path exists between ar-
bitrarily chosen two vertices vi, vj . The path between vi and
vj in T is denoted as viTvj .
A graph G contains different spanning trees as its sub-
graphs, so a set of all possible spanning trees in G is denoted
as TG = {Ti}.A leaf vertex li is a vertex whose degree is 1 in T , so it is
possible that a tree has many leaf vertices. One of the ver-
tices in V (T ) can be designated as root vertex r of T . Then,
the tree T is called a rooted tree and represented as T (r) to
declare the root vertex.
In a rooted tree, edges can be labeled based on the distance
from the root vertex r. The label of each edge ei is denoted
as level(ei). Figure 1 describes the level of each edge in a
rooted tree T (v1).
Any tree is classified into either centered or bicentered
trees. The (bi)center vertex γ (γ1, γ2 in the case of a bi-
centered tree) of a tree is found by continuous remove of leaf
vertices until the number of left vertices becomes less than
3. For instance, v2 is the center vertex of T (v1) in Figure 1.
3. 2 Ordered Set
A set M is said strictly ordered under binary relation <
and denoted as (M,<) when x, y, z ∈ M satisfy the follow-
ing properties.
∀x ∈ M, ¬ (x < x) (irreflexivity) (1)
x < y ⇒ ¬ (x > y) (asymmetry) (2)
x < y, y < z ⇒ x < z (transitivity) (3)
Relation < is total in the case that any pair of elements
x, y ∈ M can be compared under <. Thus, a strictly ordered
set (M,<) is called totally strictly ordered set or strict chain
when < is total.
4. Metrics
4. 1 Commonality of an Edge
Commonality of an edge comG(ej) is the number of paths
that contain edge ej in graph G. In Figure 1, comT (v1)(e4) =
5 because e4 is on path v6Tv4, v6Tv2, v6Tv5, v6Tv1, v6Tv3.
In contrast, comT (v1)(e3) = 8.
Especially, commonality of edge ej in spanning tree Ti =
(V, E(Ti)) is obtained by product of the size of two compo-
nents separated by ej . Because a tree is an acyclic graph,
deletion of any edge divides the tree into two connected
components, namely, C1(ej), C2(ej) (|C1(ej)| <= |C2(ej)| =|V |− |C1(ej)|). Note that Cp(ej) = (V (Cp(ej)), E(Cp(ej)))
is a subgraph of Ti, and its size is defined as |V (Cp(ej)|.Then, the commonality of ej is calculated as follows.
comTi(ej) := |C1(ej)|× |C2(ej)|. (4)
Equation (4) implies that commonality marks the mini-
mum value when |C1(ej)| = 1. Additionally, commonality
increases in accordance with the augmentation of |C1(ej)|and reaches the maximum value when |C1(ej)| = |C2(ej)|.This is because the two components satisfy C1(ej)∪C2(ej) =
V ∧ C1(ej)∩C2(ej) = ∅. Due to this property, topology of
a tree and locations of edges in the tree seriously influence
commonality of each edge.
4. 2 Edge Availability
In a practical network, reliability of a communications link
demonstrates the stability of the link to properly operate.
Modeling a network with a graph, each edge is assigned a
weight showing its probability not to fail. This weight is
named edge availability, A(en). Because edge availability in-
dicates a probability, edge availability in graph G = (V, E)
is formally denoted as follows.
weight function A : E −→ (0.0, 1.0] . (5)
Figure 2 is a graph G1 whose edges are assigned their avail-
ability.
— 2 —
v1 v2 v3 v4e2e1 e30.82 0.92 0.85
v1 v2 v3 v4
Tree T
v1Tv3
v2Tv3
v2Tv4
v1Tv4
e2e1 e3
v1 v2 v3 v4e2e1 e30.82 0.92 0.85
v1 v2 v3 v4
Tree T
v1Tv3
v2Tv3
v2Tv4
v1Tv4
e2e1 e3
comT (e2) = 4
comT (e1) = 3
paths including e2
Availability on edges.
Soka University
7
1. Commonality of an edgethe number of paths sharing the edge, which indicates importance of the edge in a graph
Especially, in tree,
comT (ei)
e.g.
2. Availability of an edgeprobability assigned to each edge that shows reliability of the edge
A(ei)
Metrics
topological characteristics, i.e., relative location of the edge
in a tree.
2. 1 Survivable Network Design Problem
Survivable Network Design Problem (SNDP) is extrac-
tion of subgraph H = (V (H), E(H)) from weighted graph
G = (V, E) with weight function w : E −→ R+ such that the
number of edge disjoint paths between vi and vj is greater
than and equal to a designated value pij for every pair of
vertices. Note that two paths are edge disjoint when the
paths do not share any edge in themselves. When pij = 1
for all combinations of vi, vj , the subgraph H is tree. Then,
SNDP is converted to Steiner Tree Problem, so the opti-
mum solution for SNDP is equal to minimum spanning tree
if V (H) = V .
2. 2 Maximum Availability Tree Problem
Maximum Availability Tree Problem (MATP) is pro-
pounded to construct the most reliable network in terms of
path reliability [5]. The study defines reliability of a path as
the product of weights of edges on the path. The objective
of the problem is to find a tree whose weakest path in terms
of the path reliability is the most reliable of the other trees
in a given graph. This paper also states that the desired op-
timum tree is obtained by minimum diameter spanning tree
algorithm.
3. Definitions
3. 1 Tree and Path
Tree T = (V (T ), E(T )) is a connected acyclic graph in
graph G = (V,E). When a tree covers all vertices in G
(V (T ) = V ), the tree is said spanning. Because a tree does
not contain any cycles from its definition, it is minimally
connected. In other words, only one path exists between ar-
bitrarily chosen two vertices vi, vj . The path between vi and
vj in T is denoted as viTvj .
A graph G contains different spanning trees as its sub-
graphs, so a set of all possible spanning trees in G is denoted
as TG = {Ti}.A leaf vertex li is a vertex whose degree is 1 in T , so it is
possible that a tree has many leaf vertices. One of the ver-
tices in V (T ) can be designated as root vertex r of T . Then,
the tree T is called a rooted tree and represented as T (r) to
declare the root vertex.
In a rooted tree, edges can be labeled based on the distance
from the root vertex r. The label of each edge ei is denoted
as level(ei). Figure 1 describes the level of each edge in a
rooted tree T (v1).
Any tree is classified into either centered or bicentered
trees. The (bi)center vertex γ (γ1, γ2 in the case of a bi-
centered tree) of a tree is found by continuous remove of leaf
vertices until the number of left vertices becomes less than
3. For instance, v2 is the center vertex of T (v1) in Figure 1.
3. 2 Ordered Set
A set M is said strictly ordered under binary relation <
and denoted as (M,<) when x, y, z ∈ M satisfy the follow-
ing properties.
∀x ∈ M, ¬ (x < x) (irreflexivity) (1)
x < y ⇒ ¬ (x > y) (asymmetry) (2)
x < y, y < z ⇒ x < z (transitivity) (3)
Relation < is total in the case that any pair of elements
x, y ∈ M can be compared under <. Thus, a strictly ordered
set (M,<) is called totally strictly ordered set or strict chain
when < is total.
4. Metrics
4. 1 Commonality of an Edge
Commonality of an edge comG(ej) is the number of paths
that contain edge ej in graph G. In Figure 1, comT (v1)(e4) =
5 because e4 is on path v6Tv4, v6Tv2, v6Tv5, v6Tv1, v6Tv3.
In contrast, comT (v1)(e3) = 8.
Especially, commonality of edge ej in spanning tree Ti =
(V, E(Ti)) is obtained by product of the size of two compo-
nents separated by ej . Because a tree is an acyclic graph,
deletion of any edge divides the tree into two connected
components, namely, C1(ej), C2(ej) (|C1(ej)| <= |C2(ej)| =|V |− |C1(ej)|). Note that Cp(ej) = (V (Cp(ej)), E(Cp(ej)))
is a subgraph of Ti, and its size is defined as |V (Cp(ej)|.Then, the commonality of ej is calculated as follows.
comTi(ej) := |C1(ej)|× |C2(ej)|. (4)
Equation (4) implies that commonality marks the mini-
mum value when |C1(ej)| = 1. Additionally, commonality
increases in accordance with the augmentation of |C1(ej)|and reaches the maximum value when |C1(ej)| = |C2(ej)|.This is because the two components satisfy C1(ej)∪C2(ej) =
V ∧ C1(ej)∩C2(ej) = ∅. Due to this property, topology of
a tree and locations of edges in the tree seriously influence
commonality of each edge.
4. 2 Edge Availability
In a practical network, reliability of a communications link
demonstrates the stability of the link to properly operate.
Modeling a network with a graph, each edge is assigned a
weight showing its probability not to fail. This weight is
named edge availability, A(en). Because edge availability in-
dicates a probability, edge availability in graph G = (V, E)
is formally denoted as follows.
weight function A : E −→ (0.0, 1.0] . (5)
Figure 2 is a graph G1 whose edges are assigned their avail-
ability.
— 2 —
topological characteristics, i.e., relative location of the edge
in a tree.
2. 1 Survivable Network Design Problem
Survivable Network Design Problem (SNDP) is extrac-
tion of subgraph H = (V (H), E(H)) from weighted graph
G = (V, E) with weight function w : E −→ R+ such that the
number of edge disjoint paths between vi and vj is greater
than and equal to a designated value pij for every pair of
vertices. Note that two paths are edge disjoint when the
paths do not share any edge in themselves. When pij = 1
for all combinations of vi, vj , the subgraph H is tree. Then,
SNDP is converted to Steiner Tree Problem, so the opti-
mum solution for SNDP is equal to minimum spanning tree
if V (H) = V .
2. 2 Maximum Availability Tree Problem
Maximum Availability Tree Problem (MATP) is pro-
pounded to construct the most reliable network in terms of
path reliability [5]. The study defines reliability of a path as
the product of weights of edges on the path. The objective
of the problem is to find a tree whose weakest path in terms
of the path reliability is the most reliable of the other trees
in a given graph. This paper also states that the desired op-
timum tree is obtained by minimum diameter spanning tree
algorithm.
3. Definitions
3. 1 Tree and Path
Tree T = (V (T ), E(T )) is a connected acyclic graph in
graph G = (V,E). When a tree covers all vertices in G
(V (T ) = V ), the tree is said spanning. Because a tree does
not contain any cycles from its definition, it is minimally
connected. In other words, only one path exists between ar-
bitrarily chosen two vertices vi, vj . The path between vi and
vj in T is denoted as viTvj .
A graph G contains different spanning trees as its sub-
graphs, so a set of all possible spanning trees in G is denoted
as TG = {Ti}.A leaf vertex li is a vertex whose degree is 1 in T , so it is
possible that a tree has many leaf vertices. One of the ver-
tices in V (T ) can be designated as root vertex r of T . Then,
the tree T is called a rooted tree and represented as T (r) to
declare the root vertex.
In a rooted tree, edges can be labeled based on the distance
from the root vertex r. The label of each edge ei is denoted
as level(ei). Figure 1 describes the level of each edge in a
rooted tree T (v1).
Any tree is classified into either centered or bicentered
trees. The (bi)center vertex γ (γ1, γ2 in the case of a bi-
centered tree) of a tree is found by continuous remove of leaf
vertices until the number of left vertices becomes less than
3. For instance, v2 is the center vertex of T (v1) in Figure 1.
3. 2 Ordered Set
A set M is said strictly ordered under binary relation <
and denoted as (M,<) when x, y, z ∈ M satisfy the follow-
ing properties.
∀x ∈ M, ¬ (x < x) (irreflexivity) (1)
x < y ⇒ ¬ (x > y) (asymmetry) (2)
x < y, y < z ⇒ x < z (transitivity) (3)
Relation < is total in the case that any pair of elements
x, y ∈ M can be compared under <. Thus, a strictly ordered
set (M,<) is called totally strictly ordered set or strict chain
when < is total.
4. Metrics
4. 1 Commonality of an Edge
Commonality of an edge comG(ej) is the number of paths
that contain edge ej in graph G. In Figure 1, comT (v1)(e4) =
5 because e4 is on path v6Tv4, v6Tv2, v6Tv5, v6Tv1, v6Tv3.
In contrast, comT (v1)(e3) = 8.
Especially, commonality of edge ej in spanning tree Ti =
(V, E(Ti)) is obtained by product of the size of two compo-
nents separated by ej . Because a tree is an acyclic graph,
deletion of any edge divides the tree into two connected
components, namely, C1(ej), C2(ej) (|C1(ej)| <= |C2(ej)| =|V |− |C1(ej)|). Note that Cp(ej) = (V (Cp(ej)), E(Cp(ej)))
is a subgraph of Ti, and its size is defined as |V (Cp(ej)|.Then, the commonality of ej is calculated as follows.
comTi(ej) := |C1(ej)|× |C2(ej)|. (4)
Equation (4) implies that commonality marks the mini-
mum value when |C1(ej)| = 1. Additionally, commonality
increases in accordance with the augmentation of |C1(ej)|and reaches the maximum value when |C1(ej)| = |C2(ej)|.This is because the two components satisfy C1(ej)∪C2(ej) =
V ∧ C1(ej)∩C2(ej) = ∅. Due to this property, topology of
a tree and locations of edges in the tree seriously influence
commonality of each edge.
4. 2 Edge Availability
In a practical network, reliability of a communications link
demonstrates the stability of the link to properly operate.
Modeling a network with a graph, each edge is assigned a
weight showing its probability not to fail. This weight is
named edge availability, A(en). Because edge availability in-
dicates a probability, edge availability in graph G = (V, E)
is formally denoted as follows.
weight function A : E −→ (0.0, 1.0] . (5)
Figure 2 is a graph G1 whose edges are assigned their avail-
ability.
— 2 —
v1 v2 v3 v4e2e1 e30.82 0.92 0.85
v1 v2 v3 v4
Tree T
v1Tv3
v2Tv3
v2Tv4
v1Tv4
e2e1 e3
v1 v2 v3 v4e2e1 e30.82 0.92 0.85
v1 v2 v3 v4
Tree T
v1Tv3
v2Tv3
v2Tv4
v1Tv4
e2e1 e3
comT (e2) = 4
comT (e1) = 3
paths including e2Paths including edge e2.
8

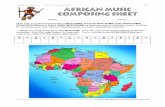
5. Problem Formulation
Focus of this Study
consideration to probabilistic stabilityand location importance
Methodology
! Modeling a com. network with aPACG
! 2 kinds of edge weights
3
3
4
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
Tree 1
4
3 3
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
Tree 2
Com
mon
ality
Availability1.0
e1
0.33
4
3
e2 e1
e2
1.00.33
4
3
Availability
Com
mon
ality
Tree 1 (Left) Tree 2 (Right)
9

5. Problem Formulation
Focus of this Study
consideration to probabilistic stabilityand location importance
Methodology
! Modeling a com. network with aPACG
! 2 kinds of edge weights
3
3
4
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
tree 1
4
3 3
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
tree 2
Com
mon
ality
Availability1.0
e1
0.33
4
3
e2 e1
e2
1.00.33
4
3
Availability
Com
mon
ality
Tree 1 (Left) Tree 2 (Right)
10

6. Problem Formulation
“resilient” in our Study! more stable edge located at more important location! more paths sharing edges with higher availability in a tree
Maximize"
vi∈V
"
v j∈Vmax
ek∈viTv jA(ek)
3
3
4
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
tree 1
4
3 3
v2 v4
v1 v3
e3
e1
e2 e4
0.33
0.33
1.0 0.67
tree 2
† the real numbers assigned to the edges are availability A(ei). 11

7. Tree Composition Approach
Order for an Edge set based on the Metrics
Exploiting the pair set on availability A(e) and commonality comG(e), theorder ≤ of an edge set is defined as follows.
e j ≤ ek ⇔ A(e j) ≤ A(ek) ∧ comG(e j) ≤ comG(ek) .
Tree 1
Tree 2
Com
mon
ality
Availability1.0
e1
0.33
4
3
e2 e1
e2
1.00.33
4
3
Availability
Com
mon
ality
Tree 1 (resilient) Tree 212

7. Tree Composition Approach
Paths Totally Ordered Trees (PTOTs)! decrease in the edge commonality along with increase in the
distance from a center γ! ordering of a path from a center to a leaf E(γTlk)! for each leaf lk, totally ordered path E(γTlk)⇒ PTOT
Procedure to obtain Paths Totally Ordered Trees (PTOTs)
Input: r Contact Graphs (CGs) over time range R = {t0, t1, ..., tr}Task: Check whether each tree on PACG GR is PTOT
Soka University
6
Big Picture of this Study
composition of a tree that alleviates the influence of single link failure on the whole network considering significance of location in the tree
each edge assigned 2 types of weights: 1. commonality : significance of location in a given tree 2. availability : reliability of the edge
all spanning trees
resilient treescompose a subset of trees whose paths are totally ordered under reliability relation on edges
13

7. Tree Composition Approach: Example
Check whether a tree on PACG GR is PTOT
leaf v1, v5, v6, v7center v3
v1
leaf l1
v2 v3
center γ
v4 v5
leaf l2
v6
leaf l3
v7
leaf l4
14

7. Tree Composition Approach: Example
Check whether a tree on PACG GR is PTOT
leaf v1, v5, v6, v7center v3paths v3Tv1, v3Tv5, v3Tv6, v3Tv7
v1
leaf l1100.8
60.5
v2 v3
center γ
v3
center γ
v4 v5
leaf l2
v3
center γ
v6
leaf l3
v3
center γ
v4
v7
leaf l415

7. Tree Composition Approach: Example
Check whether a tree on PACG GR is PTOT
leaf v1, v5, v6, v7center v3paths v3Tv1, v3Tv5, v3Tv6, v3Tv7
v1
leaf l1100.2
60.5
v2 v3
center γ
v3
center γ
v4 v5
leaf l2
v3
center γ
v6
leaf l3
v3
center γ
v4
v7
leaf l416

8. Simulation: Overview
Resiliency of every path in a tree! Does “good-thing” (high availability edges are shared much)
happen?
1|P|"
P in T
maxe∈P
A(e).
! Does NOT “bad-thing” (low availability edges are not shared much)happen?
1|P|"
P in T
mine∈P
A(e).
† P is a set of all paths in a tree T .
17

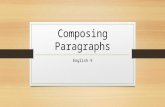
8. Simulation
Graph Settings! |V | = 50, 75, 100
125, 150! 10 sparse NWS
random graphs(k = 2, p = 0.1)
! BFS, DFS trees
Eval. index1|P|#
P in T maxe∈P A(e)1|P|#
P in T mine∈P A(e)0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
50 75 100 125 1500.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 |P|!
P⊂E(T
)max
e∈PA(e)
1 |P|!
P⊂E(T
)min
e∈PA(e)
The number of vertices
MAX TOMAX Others
MIN TOMIN Others
Results! more paths sharing edges with higher availability in a tree! less paths sharing edges with lower availability in a tree
18

9. Conclusion and Future Work
Summary
! Modeling of a network with a Probabilistic Aggregated ContactGraph (PACG)
! Edge Metrics! availability : probability of an edge to operate properly! commonality : importance of the location of an edge
! Formulation of the composition problem of a resilient tree on PACG! Composition method: Totally Ordered Paths Trees with relation ≤ on
edges
Future Tasks! some variant of this resilient topology design problem
(degree-constrained, connectivity requirements)! the proofs of the intractability of this problem
19