ocw.snu.ac.kr › sites › default › files › NOTE › 6310.pdf - Ship Stability - Part.1-IV...
120
SDAL @ Advanced Ship Design Automation Lab. http://asdal.snu.ac.kr Seoul National Univ. 2009 Fall, Ship Stability Naval Architecture & Ocean Engineering SDAL @ Advanced Ship Design Automation Lab. http://asdal.snu.ac.kr Seoul National Univ. - Ship Stability - Part.1-IV Pressure Integration Technique 2009 Prof. Kyu-Yeul Lee Department of Naval Architecture and Ocean Engineering, Seoul National University
Transcript of ocw.snu.ac.kr › sites › default › files › NOTE › 6310.pdf - Ship Stability - Part.1-IV...

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Nav
al A
rch
itec
ture
& O
cean
En
gin
eeri
ng
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
- Ship Stability -
Part.1-IV Pressure Integration Technique
2009
Prof. Kyu-Yeul Lee
Department of Naval Architecture and Ocean Engineering,Seoul National University
2009 Fall, Ship Stability
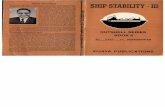
Righting Moment
Overview of “Ship Stability”
Force & Moment on a Floating BodyNewton’s 2nd Law Euler Equation
Stability Criteria
Damage Stability- MARPOL regulation
Pressure Integration Technique
Calculation Method to find GZ with respect to IMO regulation
sinGZ GM φ= ,GM KB BM KG= + −
sinL LGZ GM θ= , L LGM KB BM KG= + −
- Overview of Ship Stability
BF GZ×Transverse Righting Moment :
B LF GZ×Longitudinal Righting Moment :
<Method ②>
GZ Calculation
( )G BGZ y y= − +
( )L G BGZ x x= − +
<Method ①>
Z≡
K
z′
O
CL
y
z M
φ
restoringτ
eτ
G
FG
B B1
≡ NFB
≡
1By
Gy
φ
φ
FB: Buoyancy forceφ : Angle of Heel, θ : Angle of Trim(xG,yG,zG) : Center of gravity in waterplane fixed frame(xB,yB,zB) : Center of buoyancy in waterplane fixed fra
y'G , y'B in body fixed frame
Rotational Transformation!yG , yB in waterplane fixed frame
Fundamental of Ship Stability
• Properties which is related to hull form of the ship
Hydrostatic Values
Intact Stability- IMO Requirement (GZ)- Grain Stability- Floodable Length
2/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
- Contents -Part.1-I Fundamentals of ship stability
Ch.1 Overview of Ship StabilityCh.2 Physics for Ship StabilityCh.3 Hydrostatic Pressure, Force and Moment on a floating bodyCh.4 Concept of Righting MomentCh.5 Hydrostatic Values
Part.1-II Righting MomentCh.6 Transverse Righting MomentCh.7 Longitudinal Righting MomentCh.8 Heeling Moment caused by Fluid in Tanks
Part.1-III Stability CriteriaCh.9 Intact StabilityCh.10 Damage Stability
Part.1-IV Pressure Integration TechniqueCh.11 Calculation of Static Equilibrium PositionCh.12 Governing Equation of Force and Moment with Immersion, Heel and TrimCh.13 Partial derivatives of force and moments with immersion, heel, and trim
3/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Nav
al A
rch
itec
ture
& O
cean
En
gin
eeri
ng
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
- Ship Stability -
Ch.11 Calculation of Static Equilibrium Position
2009
Prof. Kyu-Yeul Lee
Department of Naval Architecture and Ocean Engineering,Seoul National University
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Sec.1 Example : Immersion in Static Equilibrium
after Cargo Being Loaded
Sec.2 Example : Immersion and Heel in Static Equilibrium
after Cargo Being Loaded
Sec.3 Example : Immersion and Heel in Static Equilibrium
after Cargo Hold Being Flooded
5/120
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
CLx
y′
, ′x
yPlan View
300L m=
50B m=O
w
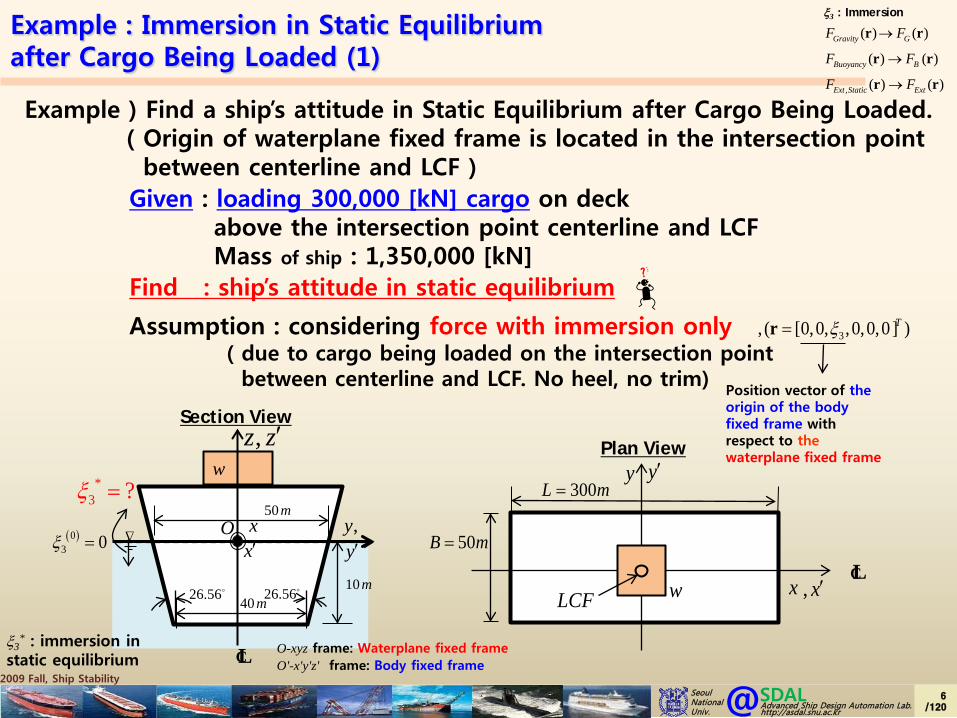
Example : Immersion in Static Equilibrium after Cargo Being Loaded (1)
Given : loading 300,000 [kN] cargo on deck above the intersection point centerline and LCFMass of ship : 1,350,000 [kN]
ξ3 : Immersion
Find : ship’s attitude in static equilibrium
Example ) Find a ship’s attitude in Static Equilibrium after Cargo Being Loaded.( Origin of waterplane fixed frame is located in the intersection point
between centerline and LCF )
CL
,
( ) ( )
( ) ( )
( ) ( )
Gravity G
Buoyancy B
Ext Static Ext
F F
F F
F F
→
→
→
r r
r r
r r
w
Assumption : considering force with immersion only( due to cargo being loaded on the intersection point
between centerline and LCF. No heel, no trim)
3, ( [0,0, ,0,0,0] )Tξ=r
LCF
x′ y′∇
, ′z z
O
Section View
,yx
*3 ?ξ =
ξ3* : immersion in
static equilibriumO-xyz frame: Waterplane fixed frameO'-x'y'z' frame: Body fixed frame
Position vector of the origin of the body fixed frame with respect to thewaterplane fixed frame
26.5626.56 10m40m
50m
( )03 0ξ =
6/120

2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
w
Example : Immersion in Static Equilibrium after Cargo Being Loaded (2)
Given : loading 300,000 [kN] cargo on deck above the intersection point centerline and LCFMass of ship : 137,755 [Mg]
Section View
ξ3 : Immersion
Find : ship’s attitude in static equilibrium
Example ) Find a ship’s attitude in Static Equilibrium after Cargo Being Loaded.( Origin of waterplane fixed frame is located in the intersection point between centerline and LCF )
x′y′
∇
, ′z z
x( )03 0ξ =
,y
CL
O
<Attitude : ξ3(0) >
(0) (0) ( (00)3
)33 3( ) ( ) ( )( )z G ExtBF F F Fξ ξξ ξ += +
Initial condition with cargo being loaded
<Attitude : ξ3* >
Static equilibrium condition ( = Total forces and moments must be ‘zero’)
*3( ) 0zF ξ =
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
We want to find *3ξ
Assumption : considering force with immersion only 3, ( [0,0, ,0,0,0] )Tξ=r
w
CL
x′ y′,O′∇
, ′z z
x
Section View
,yO
*3 ?ξ =
Given : (0)3
(0)3( ), ExtF ξξ
,
( ) ( )
( ) ( )
( ) ( )
Gravity G
Buoyancy B
Ext Static Ext
F F
F F
F F
→
→
→
r r
r r
r r
(0)3( )ExtF wξ = −
( )03 0ξ =
!
7/120

2009 Fall, Ship Stability
Example : Immersion in Static Equilibrium after Cargo Being Loaded (3)
ξ3 : Immersion
<Example> in case of force with immersion onlyGoverning equation
Given : Find : (0) (0) (0) (0)3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
*3ξ(0) (0)
3 3, ( )ExtFξ ξ
(0) (0)* (0) (0) (0)3 3
3 3 3 33 3
( ) ( )( ) ( ) B Extz z
F RFF F ξ ξξ ξ ξ ξξ ξ
∂ ∂= + ∆ + ∆ +
∂ ∂
*3( ) 0zF ξ =
Why Taylor series expansion ? Nonlinear equation
* (0) (0)3 3 3, ( )ξ ξ ξ+ ∆≈
* (0) (0)3 3 3, ( )ξ ξ ξ= + ∆
Linearization(0) (0)
* (0) (0) (0)3 33 3 3 3
3 3
( ) ( )( ) ( ) B Extz z
F FF F ξ ξξ ξ ξ ξξ ξ
∂ ∂+ ∆ + ∆
∂ ∂≈
Approximation
(0)* (0) (0)3
3 3 33
)( ) ( ) zz z
F RF F ξξ ξ ξξ
∂ (= + ∆ +
∂
(0) (0) (0)* (0) (0) (0) (0)3 3 3
3 3 3 3 33 3 3
( ) ( ) ( )( ) ( ) G B Extz z
F FF F RFξ ξ ξξ ξ ξ ξ ξξ ξ ξ
∂ ∂ ∂= + ∆ + ∆ + ∆ +
∂ ∂ ∂
w
CL
x′ y′
∇
, ′z z
x( )03 0ξ =
Section View
,y
*3 ?ξ =
Taylor series expansion
Assumption : 33
, ( )BWP
F g Aρ ξξ
∂= − ⋅
∂Buoyancy force is proportional to AWP
(AWP : waterplane area of ship)
Opposite direction
3
, 0ExtFξ
∂=
∂
Weight of cargo does not change with respect to immersion
Known :
* (0) (0) (0)3 3 3 3, ( ) ( ) ( )z z WPwhere F F g Aξ ξ ρ ξ ξ= − ⋅ ⋅∆Governing
equation*
3( ) 0zF ξ = We want to find *3ξ
FExt is independent of ξ3
( FG is not changed with immersion)
8/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
w
Example : Immersion in Static Equilibrium after Cargo Being Loaded (4)
(0) (0) (0) (0)3 3 3 3( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + + : Total force
* (0) (0) (0)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =
1
1
1,350,000[ ] 1,350,000[ ] 300,000[ ]kN kN kN= − −
(0)3( ) 300,000 [ ]ExtF kNξ = −
300,000 [ ]kN= −
(0)3
(0)3
( )
( )BV
F g dVξ
ξ ρ= ∫∫∫
(0) (0) (0) (0)3 3 3 3( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
300,000ExtF w
kN= −
= −* (0) (0)3 3 3( )ξ ξ ξ+ ∆≈
x′y′
∇
, ′z z
x ( )03 0ξ =
Section View
,y
ξ3 : Immersion
CLx
y′
, ′x
yPlan View
LCF w
ξ3*←ξ3
(0)
10m40m
50m
(0) (0) (0)3 3 3
1 ( ( ) 4 0 )( ) ( )2 sg B T Lρ ξ ξ ξ = + ⋅ ⋅
(0)3(section area) ( )g Lρ ξ= ⋅ ⋅
( )110 50 40 10 300 1,350,000[ ]2
kN = ⋅ + ⋅ ⋅ =
(0)3( ) 1,350,000[ ]GF kNξ = −
9/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
w
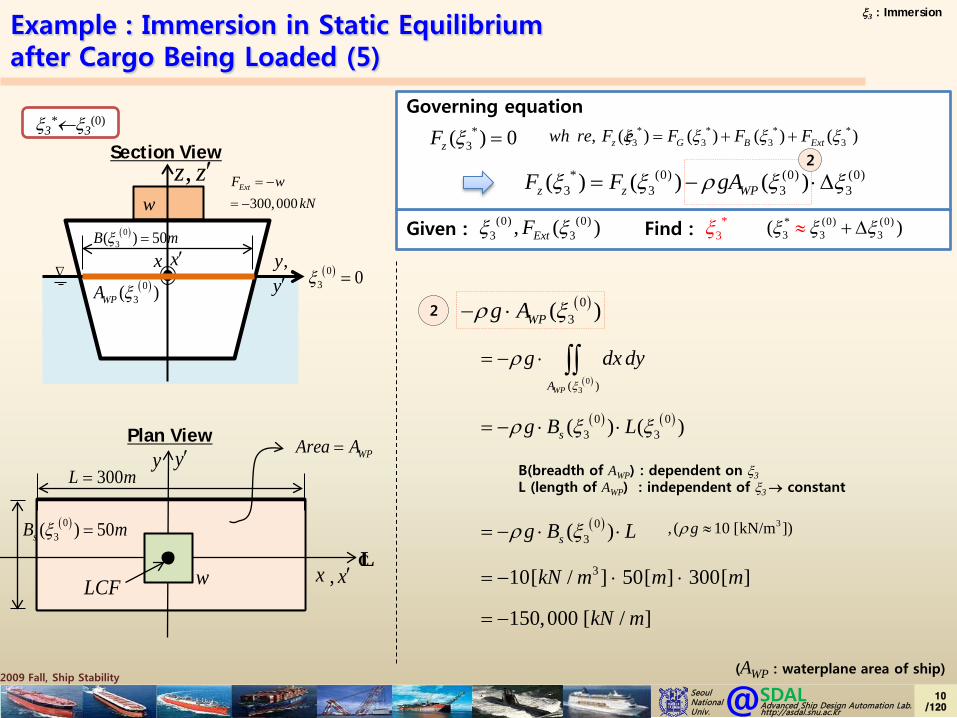
Example : Immersion in Static Equilibrium after Cargo Being Loaded (5)
( )03( )WPA
g dx dyξ
ρ= − ⋅ ∫∫
* (0) (0) (0)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =
2
( )03( )WPg Aρ ξ− ⋅2
3, ( 10 [kN/m ])gρ ≈
* (0) (0)3 3 3( )ξ ξ ξ+ ∆≈
x′y′
∇
, ′z z
x ( )03 0ξ =
Section View
,y
ξ3 : Immersion
( )03( )WPA ξ
CLx
y′
, ′x
yPlan View
LCF w
300L m=
( )03( ) 50sB mξ =
ξ3*←ξ3
(0)
WPArea A=
310[ / ] 50[ ] 300[ ]kN m m m= − ⋅ ⋅
150,000 [ / ]kN m= −
( ) ( )0 03 3( ) ( )sg B Lρ ξ ξ= − ⋅ ⋅
(AWP : waterplane area of ship)
B(breadth of AWP) : dependent on ξ3L (length of AWP) : independent of ξ3 → constant
( )03( )sg B Lρ ξ= − ⋅ ⋅
( )03( ) 50B mξ =
300,000ExtF w
kN= −
= −
10/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
w
x′y′
w
Example : Immersion in Static Equilibrium after Cargo Being Loaded (6)
* (0) (0) (0)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =
3
* (0) (0)3 3 3( )ξ ξ ξ+ ∆≈x′
y′∇
, ′z z
x ( )03 0ξ =
Section View
,y
ξ3 : Immersion
ξ3*←ξ3
(0)
(AWP : waterplane area of ship)(0)3( ) 300,000 [ ]zF kNξ = −1
1 2
(0)3( ) 150,000 [ / ]WPg A kN mρ ξ− ⋅ = −2
3
( )( )
* (0)0 3 3
3 03
( ) ( )( )
z z
WP
F FgA
ξ ξξρ ξ
−∆ =
−
( ) ( )0 03 3 0[m] 2[m] 2 [m]ξ ξ+ ∆ = − = −
(0)3ξ∆ : change of immersion
ξ3* ←ξ3
(0) +∆ξ3(0)
∇
, ′z z
x
Section View
,y( )0 (0)
3 3ξ ξ+ ∆
( ) ( ) ?0 0
3 3( ) 0zF ξ ξ+ ∆ =Static equilibrium? Check!
We want to find *3ξ
( ) ( )0 0*3 3 3
?ξ ξ ξ+ ∆=
0 ( 300,000[ ]) 2 [m]150,000[ / ]
kNkN m
− −= = −
−
300,000ExtF w
kN= −
= −
If we assume that Fz(ξ3*) =0
( )0(1) (0)3 3 3, ( ( ) ( ) 10[m] ( 2[m]) 12.0[ ])T T mξ ξ ξ= − ∆ = − − =
11/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
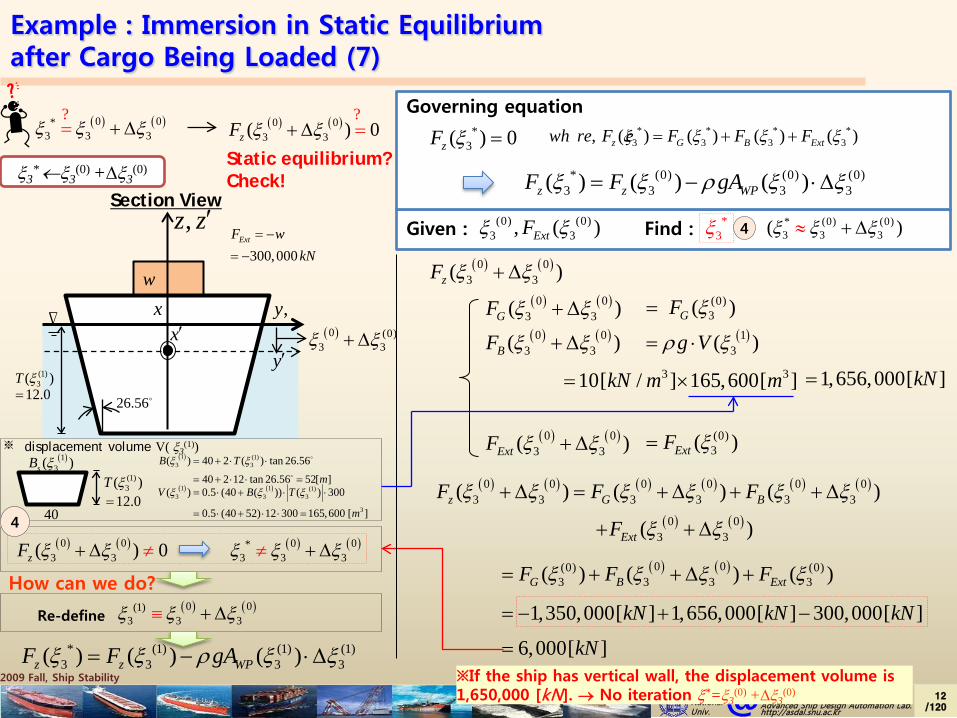
( ) ( )0 0(0) (0)3 3 3 3( ) ( ) ( )G B ExtF F Fξ ξ ξ ξ= + + ∆ +
( ) ( ) ( ) ( ) ( ) ( )0 0 0 0 0 03 3 3 3 3 3( ) ( ) ( )z G BF F Fξ ξ ξ ξ ξ ξ+ ∆ = + ∆ + + ∆
6,000[ ]kN=
( ) ( )0 03 3( )BF ξ ξ+ ∆
( ) ( )0 03 3( )GF ξ ξ+ ∆
( ) ( )0 03 3( )zF ξ ξ+ ∆
( ) ( )0 03 3( )ExtF ξ ξ+ ∆ (0)
3( )ExtF ξ=
(0)3( )GF ξ=
( )13( )g Vρ ξ= ⋅
* (0) (0) (0)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =
* (0) (0)3 3 3( )ξ ξ ξ+ ∆≈4
( ) ( )0 03 3( ) 0zF ξ ξ+ ∆ =
Static equilibrium?Check!
( ) ( )0 0*3 3 3ξ ξ ξ+ ∆=
( ) ( )0 03 3( )ExtF ξ ξ+ + ∆
( ) ( )0 03 3( ) 0zF ξ ξ+ ∆ ≠ ( ) ( )0 0*
3 3 3ξ ξ ξ+ ∆≠
( ) ( )0 0(1)3 3 3ξ ξ ξ+ ∆≡
x′y′
w
ξ3* ←ξ3
(0) +∆ξ3(0)
∇
, ′z z
x
Section View
,y( )0 (0)
3 3ξ ξ+ ∆
? ?
Example : Immersion in Static Equilibrium after Cargo Being Loaded (7)
Re-define
* (1) (1) (1)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
How can we do?
※If the ship has vertical wall, the displacement volume is 1,650,000 [kN]. → No iteration ξ*=ξ3
(0) +∆ξ3(0)
26.56
※ displacement volume V( ξ3(1))
( )1 (1)3 3( ) 40 2 ( ) tan 26.56
40 2 12 tan 26.56 52[ ]
B T
m
ξ ξ= + ⋅ ⋅
= + ⋅ ⋅ =
( ) ( )1 1 (1)3 3 3
3
( ) 0.5 (40 ( )) ( ) 300
0.5 (40 52) 12 300 165,600 [ ]
V B T
m
ξ ξ ξ= ⋅ + ⋅ ⋅
= ⋅ + ⋅ ⋅ =4
300,000ExtF w
kN= −
= −
1,350,000[ ] 1,656,000[ ] 300,000[ ]kN kN kN= − + −
( )13( )sB ξ
(1)3( )T ξ
4012.0=
3 310[ / ] 165,600[ ]kN m m= × 1,656,000[ ]kN=(1)3( )
12.0T ξ=
12/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
x′y′
w* (1) (1) (1)
3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =Section View
ξ3 : Immersion
ξ3* ←ξ3
(1)
(AWP : waterplane area of ship)
1
∇
, ′z z
x ,y(1)3ξ
CL
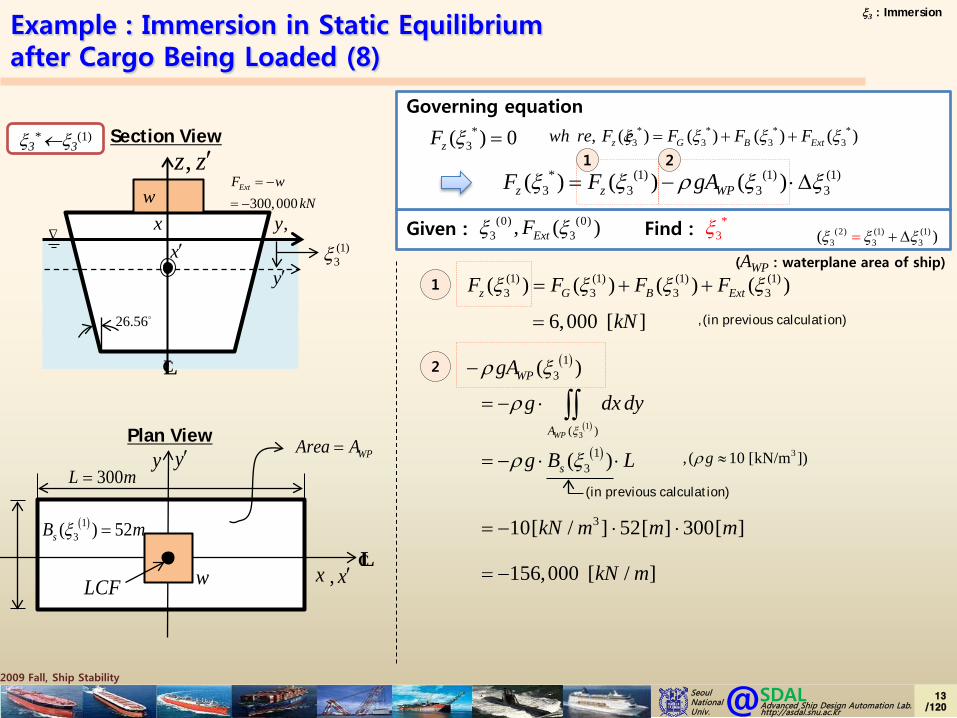
(1) (1) (1) (1)3 3 3 3( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +1
2 ( )13( )WPgAρ ξ−
310[ / ] 52[ ] 300[ ]kN m m m= − ⋅ ⋅
,(in previous calculation)
CLx
y′
, ′x
yPlan View
LCF w
300L m=
( )13( ) 52sB mξ =
WPArea A=( )1
3( )WPA
g dx dyξ
ρ= − ⋅ ∫∫( )1
3( )sg B Lρ ξ= − ⋅ ⋅
2
156,000 [ / ]kN m= −
3, ( 10 [kN/m ])gρ ≈
6,000 [ ]kN=
Example : Immersion in Static Equilibrium after Cargo Being Loaded (8)
26.56
300,000ExtF w
kN= −
= −
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
(in previous calculation)
13/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
CL
x′y′
w* (1) (1) (1)
3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =Section View
ξ3 : Immersion
ξ3* ←ξ3
(1)
1
∇
, ′z z
x ,y(1)3ξ
CL
2
3
( )( )
* (1)1 3 3
3 13
( ) ( )( )
0.034 [ ]
z z
WP
F FgA
m
ξ ξξρ ξ
−∆ =
−=
( ) ( ) ( )2 1 13 3 3 2[ ] 0.034[ ]
1.966 [ ]m m
mξ ξ ξ= + ∆ = − +
= −
(1)3ξ∆
(1)3( ) 6,000 [ ]zF kNξ =1
(1)3( ) 156,000 [ / ]WPgA kN mρ ξ− = −2
x′y′
w
Section Viewξ3* ←ξ3
(2)
∇
, ′z z
x ,y(2)3ξ
Static equilibrium? Check!
We want to find *3ξ
3
( )2*3 3ξ ξ=
? ( )23( ) 0zF ξ =
?
Example : Immersion in Static Equilibrium after Cargo Being Loaded (9)
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
(AWP : waterplane area of ship)
0 6,000[ ]156,000[ / ]
kNkN m
−=
−
If we assume that Fz(ξ3*) =0
( )2(2) (0)3 3 3, ( ( ) ( ) 10[ ] ( 1.966[ ]) 11.966[ ])T T m m mξ ξ ξ= − = − − =
14/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* (1) (1) (1)3 3 3 3( ) ( ) ( )z z WPF F gAξ ξ ρ ξ ξ= − ⋅∆
* * * *3 3 3 3, ( ) ( ) ( ) ( )z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation
(0) (0)3 3, ( )ExtFξ ξ *
3ξ
*3( ) 0zF ξ =
4
( )23( ) 0zF ξ =
Static equilibrium?Check!
( )2*3 3ξ ξ=
( )23( )zF ξ ε< , 1,000ε ≡
( )2*3 3ξ ξ=
End of iteration
(2)3( )BF ξ
(2)3( )GF ξ
(2)3( )ExtF ξ
(2)3( )zF ξ
(1)3( )GF ξ=
(1)3( )ExtF ξ=
(2) (2) (2) (2)3 3 3 3( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
(1) (2) (1)3 3 3( ) ( ) ( )G B ExtF F Fξ ξ ξ= + +
640 [ ]kN=attitude in static equilibrium
, ( 0,1, 2,3...)k =
CL
x′y′
w
Section Viewξ3
* ←ξ3(2)
∇
, ′z z
x ,y(2)3ξ
? ?
Example : Immersion in Static Equilibrium after Cargo Being Loaded (10)
※If the ship has vertical wall, The displacement volume is 1,650,000 [kN]. → No iteration ξ*=ξ3
(2)
ε : Tolerance
300,000ExtF w
kN= −
= −
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
※ displacement volume V( ξ3(2))
4
(2) (2)3 3( ) 40 2 ( ) tan 26.56
40 2 11.966 tan 26.56 51.963[ ]B T
mξ ξ= + ⋅ ⋅
= + ⋅ ⋅ =
( )1(2) (1)3 3 3
3
( ) 0.5 (40 ( )) ( ) 3000.5 (40 51.963) 11.966 300 165,064 [ ]
V B Tm
ξ ξ ξ= ⋅ + ⋅ ⋅
= ⋅ + ⋅ ⋅ =
( )13( )sB ξ
(1)3( )T ξ
4012.0=
( )23( )g Vρ ξ= ⋅
3 310[ / ] 165,064[ ]kN m m= × 1,650,640[ ]kN=
1,350,000[ ] 1,650,640[ ] 300,000[ ]kN kN kN= − + −
15/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
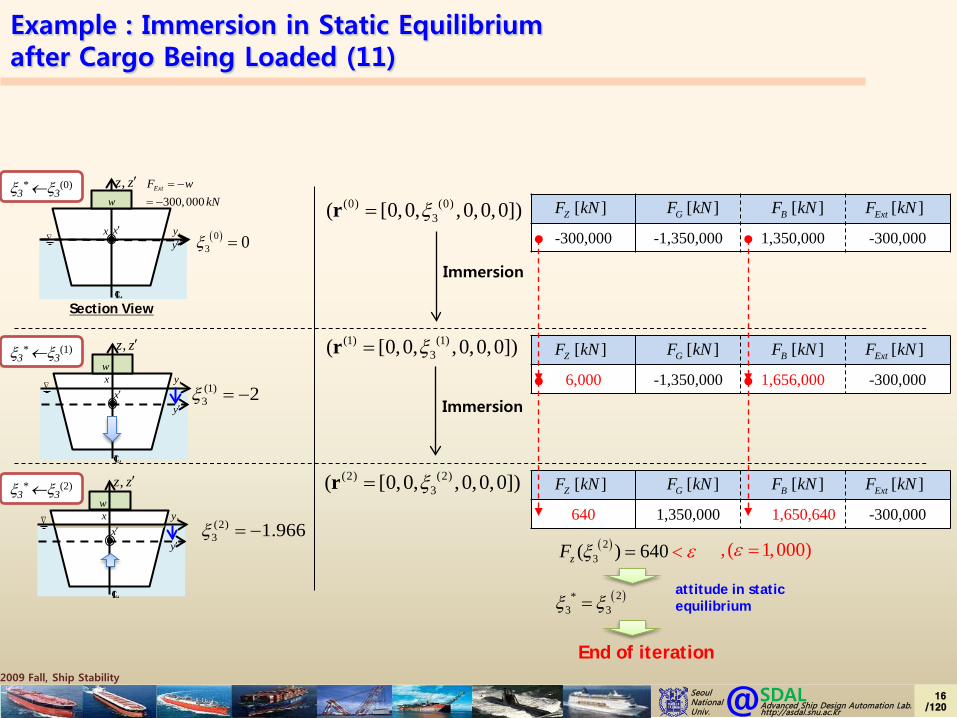
Example : Immersion in Static Equilibrium after Cargo Being Loaded (11)
ξ3* ←ξ3
(0)300,000
ExtF wkN
= −= −
x′y′
∇
w
, ′z z
x ( )03 0ξ =
Section View
,y
CL
x′y′
w
∇x ,y
(1)3 2ξ = −
CL
, ′z zξ3* ←ξ3
(1)
x′y′
w∇
, ′z z
x ,y(2)3 1.966ξ = −
CL
ξ3* ←ξ3
(2)
(0) (0)3( [0,0, ,0,0,0])ξ=r
(1) (1)3( [0,0, ,0,0,0])ξ=r
(2) (2)3( [0,0, ,0,0,0])ξ=r
Immersion
Immersion
-300,000 -1,350,000 1,350,000 -300,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
6,000 -1,350,000 1,656,000 -300,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
640 1,350,000 1,650,640 -300,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
( )23( ) 640zF εξ = < , ( 1,000)ε =
( )2*3 3ξ ξ=
attitude in static equilibrium
End of iteration
16/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Sec.1 Example : Immersion in Static Equilibrium
after Cargo Being Loaded
Sec.2 Example : Immersion and Heel in Static Equilibrium
after Cargo Being Loaded
Sec.3 Example : Immersion and Heel in Static Equilibrium
after Cargo Hold Being Flooded
17/120
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
w g
y
z
LC
,O O′
z′
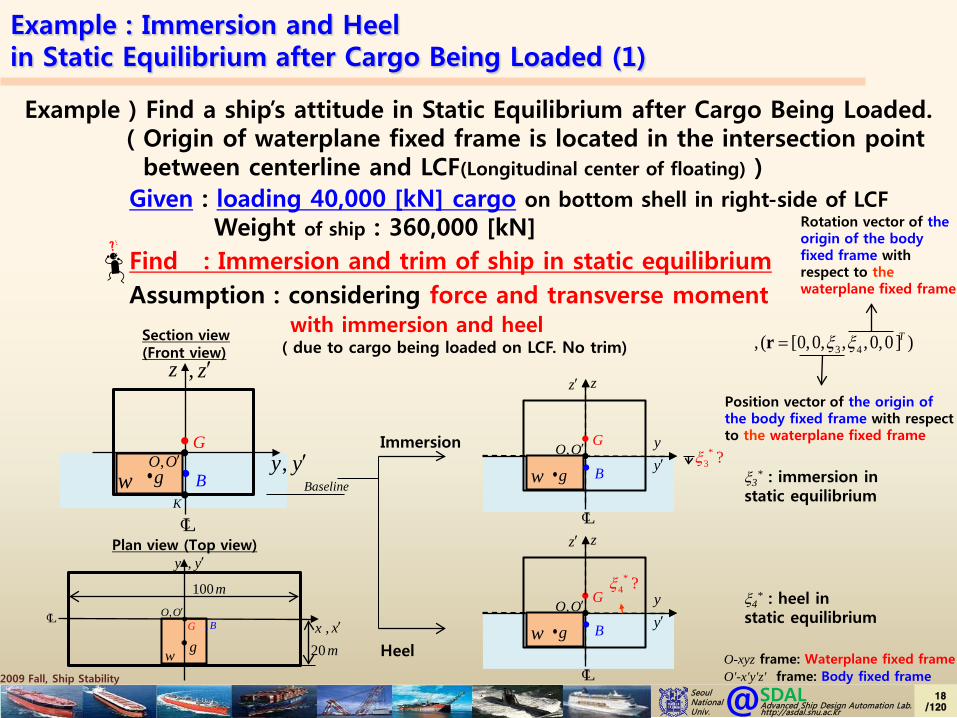
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (1)
Given : loading 40,000 [kN] cargo on bottom shell in right-side of LCFWeight of ship : 360,000 [kN]
Find : Immersion and trim of ship in static equilibrium
Example ) Find a ship’s attitude in Static Equilibrium after Cargo Being Loaded.( Origin of waterplane fixed frame is located in the intersection point
between centerline and LCF(Longitudinal center of floating) )
Assumption : considering force and transverse momentwith immersion and heel
( due to cargo being loaded on LCF. No trim) 3 4, ( [0,0, , ,0,0] )Tξ ξ=r
O-xyz frame: Waterplane fixed frameO'-x'y'z' frame: Body fixed frame
Position vector of the origin of the body fixed frame with respect to the waterplane fixed frame
Rotation vector of the origin of the body fixed frame with respect to thewaterplane fixed frame
y
z
LC
Section view(Front view)
OBaseline
K
G
, z′
, y′Bw g
,O O′Immersion
y′
G
w g B ξ3* : immersion in
static equilibrium
y
z
LC
,O O′
z′
y′
G
w g B
*4 ?ξ
Plan view (Top view)
x
y
LC
20m
,O O′G , x′
, y′
, B
100m ξ4* : heel in
static equilibrium
Heel
*3 ?ξ
18/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
G : Center of gravity of ship
B : Center of buoyancy of ship
Cargo information- w (weight) : 40,000 kN
- g (center of gravity of cargo) : (0,-10,-4.5)
100L m=
x
zElevation view (port-view)
Baseline,O O′
G
APFP
w, x′
, z′
g , B
40sB m=
30D m=9T m= y
z
LC
Section View(Front view)
,O O′Baseline
K
G
w
, z′
, y′g B
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (2)
Principal Dimension
- L (length) : 100 m, Bs (breadth) : 40m, T (draft) : 9m, D (depth) : 30m
20m
Plan view(Top View)
x
y
LC,O O′ G
w, x′
, y′
, B
O-xyz : Waterplane fixed frame
O'-x'y'z': Body fixed frame
g
19/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
( FG is not changed with immersion)
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (3)
<Example> in case of force with immersion and heel Governing equation of forceGiven : Find : (0) (0) (0) (0) (0) (0) (0) (0)
3 4 3 4 3 4 3 4, ( , ) ( , ) ( , ) ( , )z G B Extwh ere F F F Fξ ξ ξ ξ ξ ξ ξ ξ= + +
* * * * * * * *3 4 3 4 3 4 3 4, ( , ) ( , ) ( , ) ( , )z G B Extwh ere F F F Fξ ξ ξ ξ ξ ξ ξ ξ= + +
*3ξ(0) (0) (0) (0)
3 4 3 4, , ( , )ExtFξ ξ ξ ξ
(0) (0)(0) (0)* * (0) (0) 3 43 4
3 4 3 4(0) (0)3 3
3 3
( , )( , )( , ) ( , ) ExtB
z z RFFF F ξ ξξ ξξ ξ ξ ξ ξ ξ
ξ ξ∂∂
= + ∆ + ∆ +∂ ∂
* *3 4( , ) 0zF ξ ξ =
* (0) (0)3 3 3, ( )ξ ξ ξ+ ∆≈
* (0) (0)3 3 3, ( )ξ ξ ξ= + ∆
Linearization(0) (0)(0) (0)
* * (0) (0) 3 43 43 4 3 4
(0) (0)3 3
3 3
( , )( , )( , ) ( , ) ExtB
z zFFF F ξ ξξ ξ
ξ ξ ξ ξ ξ ξξ ξ
∂∂= + ∆ + ∆
∂ ∂
Approximation
(0) (0) (0) (0)* * (0) (0) 3 4 3 4
3 4 3 4(0) (0)3 4
3 4
( , ) ( , )( , ) ( , ) z z
z zF FF F Rξ ξ ξ ξ
ξ ξ ξ ξ ξ ξξ ξ
∂ ∂= + ∆ + ∆ +
∂ ∂(0) (0) (0) (0)(0) (0)
* * (0) (0) 3 4 3 43 43 4 3 4
(0) (0) (0)3 3 3
3 3 3
( , ) ( , )( , )( , ) ( , ) G ExtB
z zF FFF RF ξ ξ ξ ξξ ξ
ξ ξ ξ ξ ξ ξ ξξ ξ ξ
∂ ∂∂= + ∆ + ∆ + ∆ +
∂ ∂ ∂
Taylor series expansion
Assumption : 3 43 4
3
( , ), ( , )BWP
F gAξ ξ ρ ξ ξξ
∂= −
∂Buoyancy force is proportional to AWP
(AWP : waterplane area of ship)
Opposite direction
3 4
3
( , ), 0ExtF ξ ξξ
∂=
∂
Weight of cargo does not change with respect to immersion
Known :
* * (0) (0) (0)3 4 3 4 4
(0) (0)3 3( , ) ( , ), ( , )z z WPwhere F F gAξ ξ ξ ξ ξρ ξ ξ= − ⋅ ∆
Governing equation of force
* *3 4( , ) 0,zF ξ ξ =
FExt is independent of ξ3
This term is not considered in this example
Given : Find : (0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4, ( , ) ( , ) ( , ) ( , )z G B Extwh ere F F F Fξ ξ ξ ξ ξ ξ ξ ξ= + + *
3ξ(0) (0) (0) (0)3 4 3 4, , ( , )ExtFξ ξ ξ ξ
20/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (4)
<Example> in case of transverse moment with immersion and heel Governing equation of Transverse moment
Given : Find : (0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +
* * * * * * * *3 4 3 4 3 4 , 3 4, ( , ) ( , ) ( , ) ( , )T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +
*4ξ(0) (0) (0) (0)
3 4 , 3 4, , ( , )T ExtMξ ξ ξ ξ
* *3 4( , ) 0TM ξ ξ =
* (0) (0)4 4 4, ( )ξ ξ ξ+ ∆≈
* (0) (0)4 4 4, ( )ξ ξ ξ= + ∆
Linearization(0) (0)(0) (0) (0) (0)
3 4* * (0) (0) 3 4 3 43 4 3 4
,(0) (0) (0)4 4 4
4 4 4
( , )( , ) ( , )( , ) ( , ) T ExtTG TB
T T
MM MM M
ξ ξξ ξ ξ ξξ ξ ξ ξ ξ ξ ξ
ξ ξ ξ∂∂ ∂
= + ∆ + ∆ + ∆∂ ∂ ∂
Approximation
(0) (0) (0) (0)* * (0) (0) 3 4 3 4
3 4 3 4(0) (0)3 4
3 4
( , ) ( , )( , ) ( , ) T T
T TM M
M M Rξ ξ ξ ξξ ξ ξ ξ ξ ξ
ξ ξ∂ ∂
= + ∆ + ∆ +∂ ∂
(0) (0)(0) (0) (0) (0)3 4* * (0) (0) 3 4 3 4
3 4 3 4,(0) (0) (0)
4 4 44 4 4
( , )( , ) ( , )( , ) ( , ) T ExtTG TB
T T
MM MM M R
ξ ξξ ξ ξ ξξ ξ ξ ξ ξ ξ ξ
ξ ξ ξ∂∂ ∂
= + ∆ + ∆ + ∆ +∂ ∂ ∂
Taylor series expansion
We want to find *3ξ
This term is not considered in this example.
3 43 4 3 4 3 4
4
( , )( , ) ( , ) ( , ),TB
B B TM F z gIξ ξ
ξ ξ ξ ξ ξ ξρξ
∂= − ⋅ −
∂
3 43 4 3 4
4
( , )( , ) ( , ),TG
G GM F zξ ξ
ξ ξ ξ ξξ
∂= − ⋅
∂
3 43 4 3 4
,
4
( , )( , ) ( , )T Ext
Ext Ext
MF z
ξ ξξ ξ ξ ξ
ξ∂
= − ⋅∂
zG: Z coordinate of the center of mass of the ship IT: 2nd moment of waterplane area with respect to x axis of the waterplane fixed framezB: Z coordinate of the center of buoyancy
zExt: Z coordinate of the point acting the external force
* * * * * * * *3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +Governing equation
of transverse moment* *
3 4( , ) 0TM ξ ξ =
Given : (0) (0) (0) (0)3 4 , 3 4, , ( , )T ExtMξ ξ ξ ξ Find : *
4ξ(1) (0) (0)
4 4 4, ( )ξ ξ ξ+ ∆=
(0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4* * (0) (0)
3 4 3 4 (0) (0) (0) (0) (0) (0)3 4 3 4 3 4
(0)4
( , ) ( , ) ( , ) ( , )( , )
( , ) ( , ) ( , )( , ) G G B B
T TT Ext Ext
F z F zM M
gI F zξ ξ ξ ξ ξ ξ ξ ξ
ξ ξξ ξ ξ ξ ξ ξ
ξ ξ ξρ
− ⋅ − ⋅= + ∆ − − ⋅
21/120

2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
(ref.) Transverse moment of gravity with heel
Transverse moment of gravity
3 4 4( , )TGM ξ ξ ξ+ ∆
( )3 4 3 4 4 3 4 4( , ) ( , ) cos ( , ) sinG G GF y zξ ξ ξ ξ ξ ξ ξ ξ= ⋅ ⋅ ∆ − ⋅ ∆
3 4 3 4 3 4 4( , ) ( , ) ( , )TG G GM F zξ ξ ξ ξ ξ ξ ξ= − ⋅ ⋅ ∆3 4( , )TGM ξ ξ
If is small4ξ∆
Transformation
3 4 4 3 4 4( , ) ( , )G GF yξ ξ ξ ξ ξ ξ= + ∆ ⋅ + ∆
3 4 4 3 4
3 4 4 3 4 4 3 4 4
3 4 4 3 4 4 3 4 4
( , ) ( , )
( , ) ( , )cos ( , )sin
( , ) ( , )cos ( , )sin
G G
G G G
G G G
x xy y zz z y
ξ ξ ξ ξ ξ
ξ ξ ξ ξ ξ ξ ξ ξ ξ
ξ ξ ξ ξ ξ ξ ξ ξ ξ
+ ∆ =
+ ∆ = ∆ − ∆ + ∆ = ∆ + ∆
3 4 4 3 4
3 4 4 4 4 3 4
3 4 4 4 4 3 4
( , ) 1 0 0 ( , )( , ) 0 cos sin ( , )( , ) 0 sin cos ( , )
G G
G G
G G
x xy yz z
ξ ξ ξ ξ ξξ ξ ξ ξ ξ ξ ξξ ξ ξ ξ ξ ξ ξ
+ ∆ + ∆ = ∆ − ∆ + ∆ ∆ ∆
3 4 3 4 3 4 3 4 4( , ) ( , ) ( , ) ( , )G G G GF y F zξ ξ ξ ξ ξ ξ ξ ξ ξ= ⋅ − ⋅ ⋅ ∆( )3 4 3 4 3 4 4( , ) ( , ) ( , )G G GF y zξ ξ ξ ξ ξ ξ ξ≈ ⋅ − ⋅ ∆
3 4 3 4 4( , ) ( , )G GF yξ ξ ξ ξ ξ= ⋅ + ∆
4
TGMξ
∂∂
=
y
z
LC
z′
y′
4ξ∆
,O O′
Section view
GF
3 4 4( , )G ξ ξ ξ+ ∆3 4( , )G ξ ξ
22/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (5)
Governing equation* *
3 4( , ) 0TM ξ ξ = * * * * * * * *3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +
(0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4* * (0) (0)
3 4 3 4 (0) (0) (0) (0) (0) (0)3 4 3 4 3 4
(0)4
( , ) ( , ) ( , ) ( , )( , )
( , ) ( , ) ( , )( , ) G G B B
T TT Ext Ext
F z F zM M
gI F zξ ξ ξ ξ ξ ξ ξ ξ
ξ ξξ ξ ξ ξ ξ ξ
ξ ξ ξρ
− ⋅ − ⋅= + ∆ − − ⋅
zG: Z coordinate of the center of mass of the ship
IT: 2nd moment of waterplane area with respect to x axis of the waterplane fixed frame
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
≡
K
O
CL
y
z,
φ
G Z
FG
B B1
≡ N
FB
≡
restoringτ
M
O'
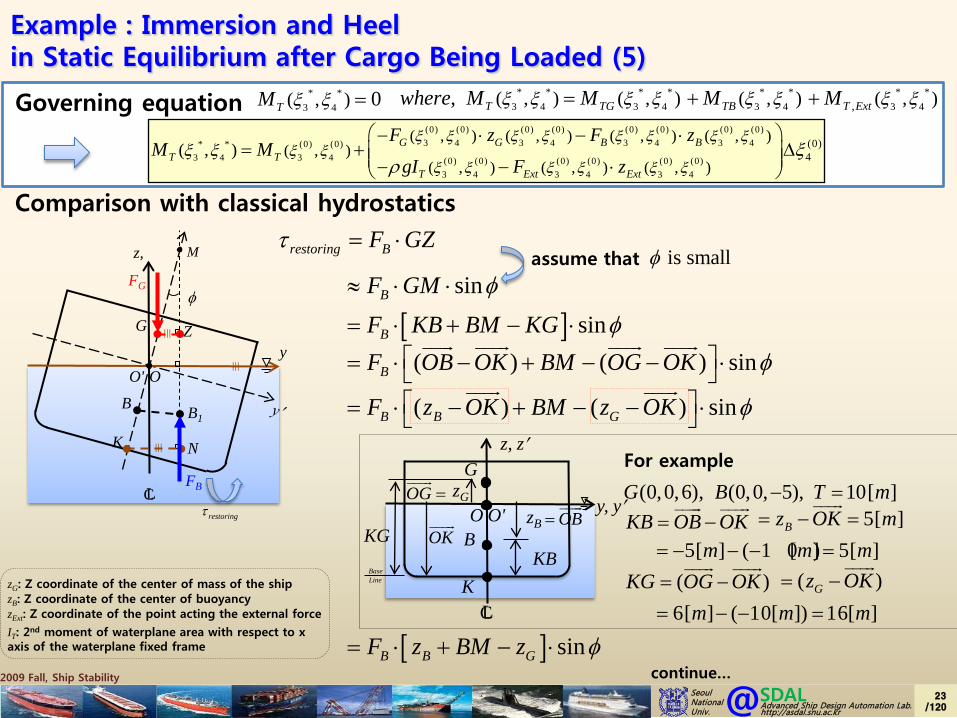
Comparison with classical hydrostatics
restoring BF GZτ = ⋅
sinBF GM φ≈ ⋅ ⋅
[ ] sinBF KB BM KG φ= ⋅ + − ⋅
KB OB OK= −
For example
5[ ]Bz OK m= − =(0,0,6), (0,0, 5), 10[ ]G B T m− =
( )KG OG OK= −
O'
CL
z, z′
K
B
G
BaseLine
O y, y′
KBKG
( )Gz OK= −
( ) ( ) sinB B GF z OK BM z OK φ = ⋅ − + − − ⋅
[ ] sinB B GF z BM z φ= ⋅ + − ⋅continue…
assume that is smallφ
( ) ( ) sinBF OB OK BM OG OK φ = ⋅ − + − − ⋅
5[ ] ( 1 0 )[ ] 5[ ]m m m= − − − =
6[ ] ( 10[ ]) 16[ ]m m m= − − =
OK zB OB=
zGOG =
23/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Governing equationof transverse moment
* *3 4( , ) 0TM ξ ξ = * * * * * * * *
3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +(0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4* * (0) (0)
3 4 3 4 (0) (0) (0) (0) (0) (0)3 4 3 4 3 4
(0)4
( , ) ( , ) ( , ) ( , )( , )
( , ) ( , ) ( , )( , ) G G B B
T TT Ext Ext
F z F zM M
gI F zξ ξ ξ ξ ξ ξ ξ ξ
ξ ξξ ξ ξ ξ ξ ξ
ξ ξ ξρ
− ⋅ − ⋅= + ∆ − − ⋅
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (6)
zG: Z coordinate of the center of mass of the ship
IT: 2nd moment of waterplane area with respect to x axis of the waterplane fixed frameV: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
≡
K
O'
CL
y
z,
φ
G Z
FG
B B1
≡ N
FB
≡
restoringτ
M
O
Comparison with classical hydrostatics
restoring BF GZτ = ⋅
[ ] sinB B GF z BM z φ= ⋅ + − ⋅
sinTB B G
IF z zV
φ = ⋅ + − ⋅
TIBMV
=
sinTB B B G
IF z g V F zV
ρ φ = ⋅ + ⋅ − ⋅ ⋅ in static equilibrium
0G BF F+ =
[ ] sinB B T G GF z g I F zρ φ= ⋅ + ⋅ + ⋅ ⋅
Linearizationsinφ φ≈[ ]G G B B TF z F z g Iρ φ≈ ⋅ + ⋅ + ⋅ ⋅
In similar way, if FExt are applied, then FExt⋅ zExt would be included
[ ]G G B B T Ext ExtF z F z g I F zρ φ= ⋅ + ⋅ + ⋅ + ⋅ ⋅Match! except sign?
BF gVρ=
B GF F∴ = −
[ ] sinG G B B TF z F z g Iρ φ= ⋅ + ⋅ + ⋅ ⋅
24/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Governing equationof transverse moment
* *3 4( , ) 0TM ξ ξ = * * * * * * * *
3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +(0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4* * (0) (0)
3 4 3 4 (0) (0) (0) (0) (0) (0)3 4 3 4 3 4
(0)4
( , ) ( , ) ( , ) ( , )( , )
( , ) ( , ) ( , )( , ) G G B B
T TT Ext Ext
F z F zM M
gI F zξ ξ ξ ξ ξ ξ ξ ξ
ξ ξξ ξ ξ ξ ξ ξ
ξ ξ ξρ
− ⋅ − ⋅= + ∆ − − ⋅
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (7)
Comparison with classical hydrostatics ( (+), (-) sign )
Defined that clockwise direction is positive.
In classical hydrostatics In pressure integration technique
Defined that counter-clockwise direction is positive.
≡
K
O'
CL
y
z,
-∆ξ4
G Z
B0 B1
≡ N
M
O
restoring BF GZτ = ⋅
[ ] 4( )G G B B T Ext ExtF z F z g I F zρ ξ= ⋅ + ⋅ + ⋅ + ⋅ −∆⋅
[ ] ( )4G G B B T Ext ExtF z F z g I F zρ ξ= − ⋅ − ⋅ − ⋅ ⋅ ∆− ⋅Match!
if we consider opposite definition of heel angle ( )4φ ξ= −∆
+ +
≡
K
O'
CL
y
z,
+φG Z
B0 B1
≡ N
M
O
restoringτ restoringτ
[ ]G G B B T Ext ExtF z F z g I F zρ φ= ⋅ + ⋅ + ⋅ + ⋅ ⋅
25/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
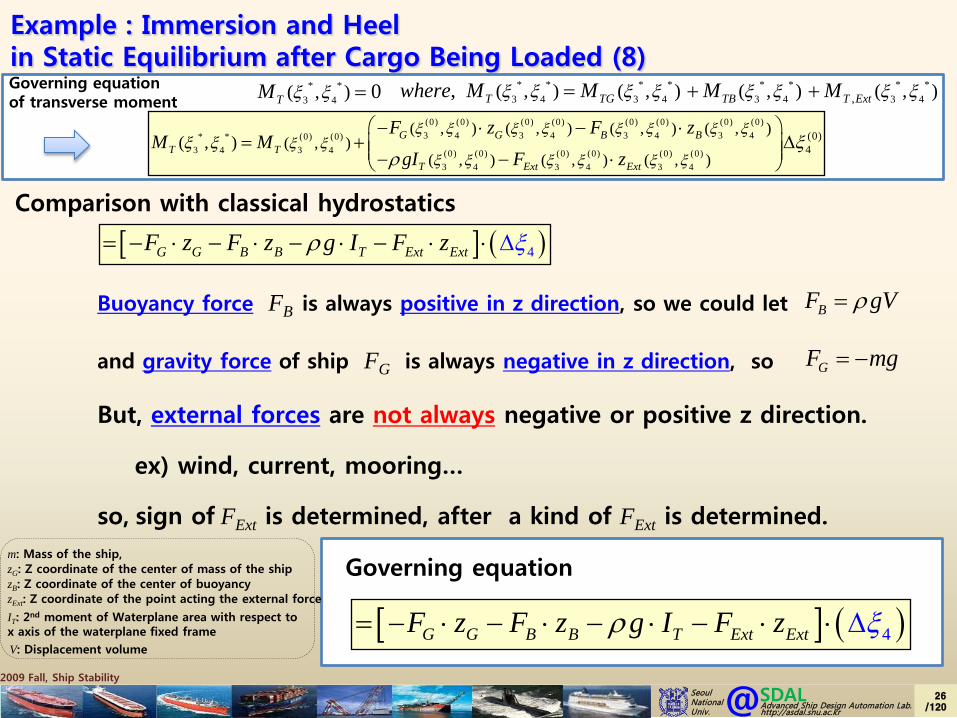
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (8)
m: Mass of the ship, zG: Z coordinate of the center of mass of the ship
IT: 2nd moment of Waterplane area with respect to x axis of the waterplane fixed frameV: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
Comparison with classical hydrostatics
[ ] ( )4G G B B T Ext ExtF z F z g I F zρ ξ= − ⋅ − ⋅ − ⋅ ⋅ ∆− ⋅
But, external forces are not always negative or positive z direction.
ex) wind, current, mooring…
so, sign of FExt is determined, after a kind of FExt is determined.
Buoyancy force FB is always positive in z direction, so we could let BF gVρ=
and gravity force of ship FG is always negative in z direction, so GF mg= −
[ ] ( )4G G B B T Ext ExtF z F z g I F zρ ξ= − ⋅ − ⋅ − ⋅ ⋅ ∆− ⋅
Governing equation
Governing equationof transverse moment
* *3 4( , ) 0TM ξ ξ = * * * * * * * *
3 4 3 4 3 4 3 4,( , ) ( , ) ( , ) ( , ), T TG TB T Extwhere M M M Mξ ξ ξ ξ ξ ξ ξ ξ= + +(0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4* * (0) (0)
3 4 3 4 (0) (0) (0) (0) (0) (0)3 4 3 4 3 4
(0)4
( , ) ( , ) ( , ) ( , )( , )
( , ) ( , ) ( , )( , ) G G B B
T TT Ext Ext
F z F zM M
gI F zξ ξ ξ ξ ξ ξ ξ ξ
ξ ξξ ξ ξ ξ ξ ξ
ξ ξ ξρ
− ⋅ − ⋅= + ∆ − − ⋅
26/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
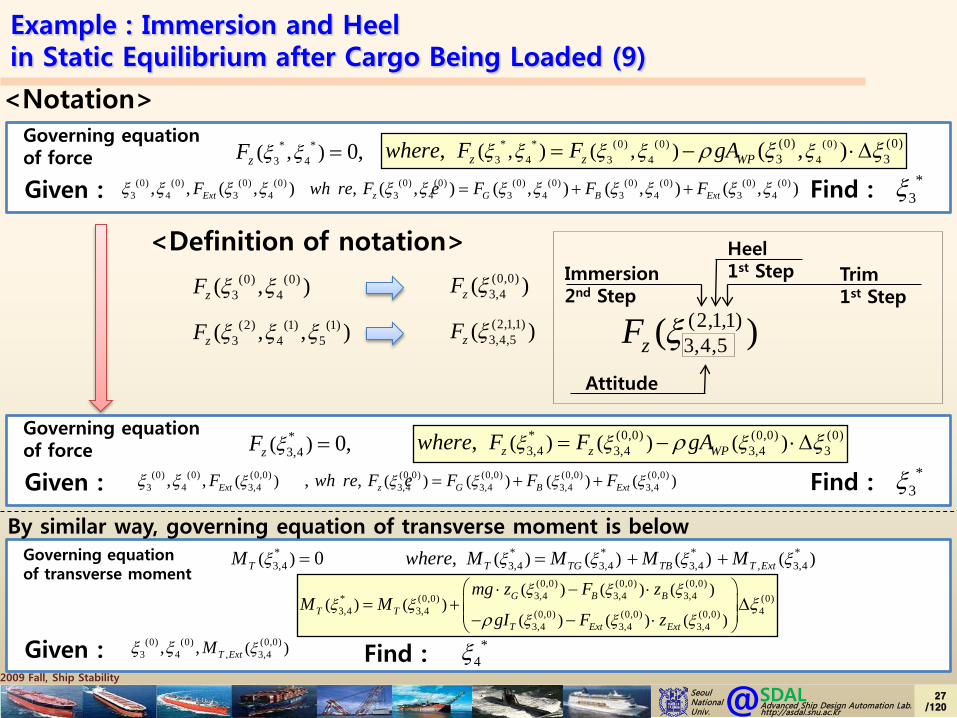
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (9)
<Notation>* * (0) (0) (0)
3 4 3 4 4(0) (0)3 3( , ) ( , ), ( , )z z WPwhere F F gAξ ξ ξ ξ ξρ ξ ξ= − ⋅ ∆
Governing equation of force
* *3 4( , ) 0,zF ξ ξ =
Given : Find : (0) (0) (0) (0) (0) (0) (0) (0)3 4 3 4 3 4 3 4, ( , ) ( , ) ( , ) ( , )z G B Extwh ere F F F Fξ ξ ξ ξ ξ ξ ξ ξ= + + *
3ξ(0) (0) (0) (0)3 4 3 4, , ( , )ExtFξ ξ ξ ξ
(0) (0)3 4( , )zF ξ ξ (0,0)
3,4( )zF ξ
<Definition of notation>
(2) (1) (1)3 4 5( , , )zF ξ ξ ξ (2,1,1)
3,4,5( )zF ξ (2,1,1)3,4,5( )zF ξ
Immersion2nd Step
Attitude
Heel1st Step Trim
1st Step
* (0,0) (0,0) (0)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
Governing equation of force
*3,4( ) 0,zF ξ =
Given : Find : (0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), , z G B Extwh ere F F F Fξ ξ ξ ξ= + + *
3ξ(0) (0) (0,0)3 4 3,4( ), , ExtF ξξ ξ
We want to find *3ξ
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +Governing equation
of transverse moment*3,4( ) 0TM ξ =
Given : (0) (0) (0,0)3 4 , 3,4( ), , T ExtM ξξ ξ Find : *
4ξ
(0,0) (0,0) (0,0)3,4 3,4 3,4* (0,0) (0)
3,4 3,4 4(0,0) (0,0) (0,0)3,4 3,4 3,4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B B
T TT Ext Ext
mg z F zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξξ
ρ
⋅ − ⋅= + ∆ − − ⋅
By similar way, governing equation of transverse moment is below
27/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
ξ3 : immersionξ4 : heel
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (10)
* (0,0) (0,0) (0)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
1
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
0 step, Immersion
(0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
: Total force
1
(0,0) 43,4( ) 4.0 10 [ ]ExtF w kNξ = − = − ×
y
z
LC40 m
30 m
9m=
Section view
,O O′Baseline
G
w
, z′
, y′g B
Plan view
x
y
LC
20m
,O O′G
w
, x′
, y′
, B
44.0 10w kN= ×
(0,0)3,4
(0,0)3,4
( )
( )BV
F g dVξ
ξ ρ= ⋅ ∫∫∫
(0,0) 53,4( ) 3.6 10 [ ]GF kNξ = − ×
5 5 43.6 10 [ ] 3.6 10 [ ] 4.0 10 [ ]kN kN kN= − × + × − ×44.0 10 [ ]kN= − ×
100m
(0,0)3,4( )ExtF wξ = −
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(0,0) (0,0) (0,0)3,4 3,4 3,4( ) ( ) ( )sg L B Tξ ξ ξρ= ⋅ ⋅ ⋅
10[ ] 100[ ] 40[ ] 9[ ]m m m m= ⋅ ⋅ ⋅53.6 10 [ ]kN= ×
(0,0)3,4( )T ξ
g(0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
28/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* (0,0) (0,0) (0)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
(0,0)3,4( )WPg A ξρ−
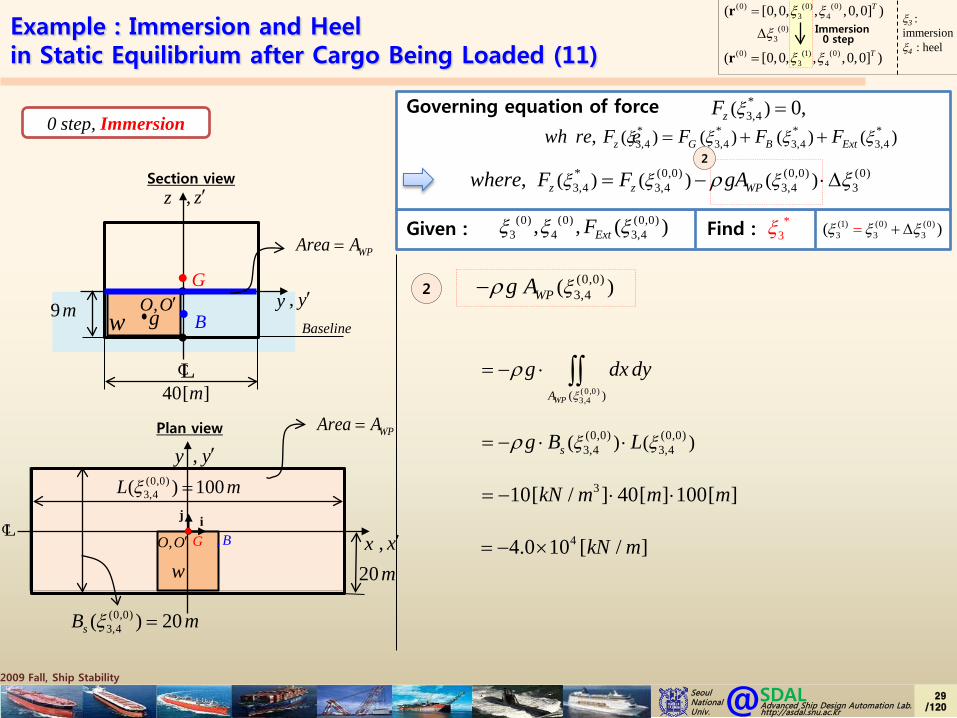
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (11)
2
0 step, Immersion
2y
z
LC40[ ]m
9m
Section view
,O O′Baseline
G
w
, z′
, y′g B
Plan view
x
y
LCj i
20m,O O′ G
w, x′
, y′
, B
(0,0)3,4( )WPA
g dx dyξ
ρ= − ⋅ ∫∫
(0,0) (0,0)3,4 3,4( ) ( )sg B Lξ ξρ= − ⋅ ⋅
WPArea A=
WPArea A=
310[ / ] 40[ ] 100[ ]kN m m m= − ⋅ ⋅
44.0 10 [ / ]kN m= − ×
(0,0)3,4( ) 100L mξ =
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(0,0)3,4( ) 20sB mξ =
ξ3 : immersionξ4 : heel
29/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* (0,0) (0,0) (0)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
y
z
LC
Section view
,O O′
, z′
y′Baselinew 1g
K
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (12)
3
0 step, Immersion
y
z
LC
Section view
,O O′Baseline
G
w
, z′
, y′g B
(0,0) 43,4( ) 4.0 10 [ ]zF kNξ = − ×1
(0,0) 43,4( ) 4.0 10 [ / ]WPgA kN mξρ− = − ×2
* (0,0)3,4 3,4(0)
3 (0,0)3,4
( ) ( )
( )z z
WP
F FgA
ξ ξ
ξξ
ρ−
∆ =−
(0)3ξ∆3 : change of immersion
1 2
( ) ( ) ( )1 0 03 3 3 0 1 1 [ ]mξ ξ ξ= + ∆ = − = −
We want to find *3ξ
Static equilibrium? Check!
9m=
( )1*3 3ξ ξ=
? (1,0)3,4( ) 0zF ξ =
?10m
If we assume that Fz(ξ3,4*) =0
4
4
0[ ] ( 4.0 10 )[ ] 1[ ]4.0 10 [ ]
kN kN mkN
− − ×= = −
− ×
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
1G
1B
(0,0)3,4( )T ξ
ξ3 : immersionξ4 : heel
30/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* (0,0) (0,0) (0)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
Baseline
G
w 1g
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (13)
0 step, Immersion
y
z
LC
Section view
,O O′
, z′
y′B
(1,0)3,4( ) 0zF ξ =
Static equilibrium?Check!
( )1*3 3ξ ξ=
(0)3ξ∆
(1,0)3,4( )BF ξ
(1,0)3,4( )GF ξ
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= ++
(1,0)3,4( )ExtF ξ (0,0) 4
3,4( ) 4.0 10 [ ]ExtF kNξ= = − ×
(0,0) 53,4( ) 3.6 10 [ ]GF kNξ= = − ×
(1,0)3,4( )g V ξρ= ⋅
3 4 310[ / ] 4.0 10 [ ]kN m m= × ×
(1, 0)3, 4
(1,0)3,4
( )
( )V
V dVξ
ξ = ∫∫∫
54.0 10 [ ]kN= ×
(1,0)3,4( )zF ξ (1,0) (1,0) (1,0)
3,4 3,4 3,4( ) ( ) ( )G B ExtF F Fξ ξ ξ= ++5 5 43.6 10 [ ] 4.0 10 [ ] 4.0 10 [ ]kN kN kN= − × + × − ×
0[ ]kN=
4(1,0)3,4( ) 0zF ξ = ( )1*
3 3ξ ξ=
If ξ4(1) is also ξ4
*, then the iteration ends.
4
Check ξ4(1)
10m=
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
4 3100[ ] 40[ ] 10[ ] 4.0 10 [ ]m m m m= ⋅ ⋅ = ×44.0 10w kN= ×
(1,0)3,4( )ExtF wξ = −
?
?
(1,0)3,4( )T ξ
(1,0) (1,0) (1,0)3,4 3,4 3,4( ) ( ) ( )sL B Tξ ξ ξ= ⋅ ⋅
In this example
ξ3 : immersionξ4 : heel
31/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (14)
0 step
(0) (0) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
LC
O′
(0,0)3,4( )G ξ
w
,z z′
,y y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ
O -40,000 -360,000 360,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
0 -360,000 400,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=rNext step
End of Immersion 0 step.
Start Heel 0 step.
(1,0)3,4( )G ξ
w(1,0)3,4( )g ξ
y
,z z′
LC
O
y′(1,0)3,4( )B ξ
(0)3ξ∆
O′
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
ξ3 : immersionξ4 : heel
32/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (15)
y
z
LC
,O O′
(0,0)3,4( )G ξ
w
, z′
, y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ9[ ]m=
(0,0)3,4( )T ξ
y
,z z′
LC
O (0)3ξ∆
y′w(1,0)3,4( )g ξ
O′10m=
(1,0)3,4( )T ξ
(0,0)3,4(0,0)3,4(0,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(0,0)3,4( ) (0,0,6)G ξ =
(0,0)3,4( ) (0, 10, 4.5)g ξ = − −
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
0 step, Heel(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(0)3
00
ξ
+ ∆
(0,0)3,4(0,0)3,4(0,0) (0)3,4 3
( )( )( )
00
G
G
G
xyz
ξ
ξ
ξ ξ
= + ∆
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
G
G
G
xyz
ξ
ξ
ξ
(1) (0) (0)3 3 3ξ ξ ξ= + ∆
0 00 06 1
= + −
(0,0)3,4(0,0)3,4(0,0) (0)3,4 3
( )( )( )
00
g
g
g
xyz
ξ
ξ
ξ ξ
= + ∆
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
g
g
g
xyz
ξ
ξ
ξ
0 010 04.5 1
= − + − −
005
=
0105.5
= − −
(0,0)3,4( ) (0,0, 4.5)B ξ = − (1,0)
3,4( ) (0,0, 5)B ξ = −
(1,0)3,4( )B ξ
(1,0)3,4( )G ξ
For center of gravity of ship (1,0)3,4( )G ξ
For center of weight of cargo (1,0)3,4( )g ξ
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
ξ3 : immersionξ4 : heel
to calculate (1,0)3,4( )TM ξCalculate (1,0) (1,0) (0,0)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ0 step, Heel
33/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
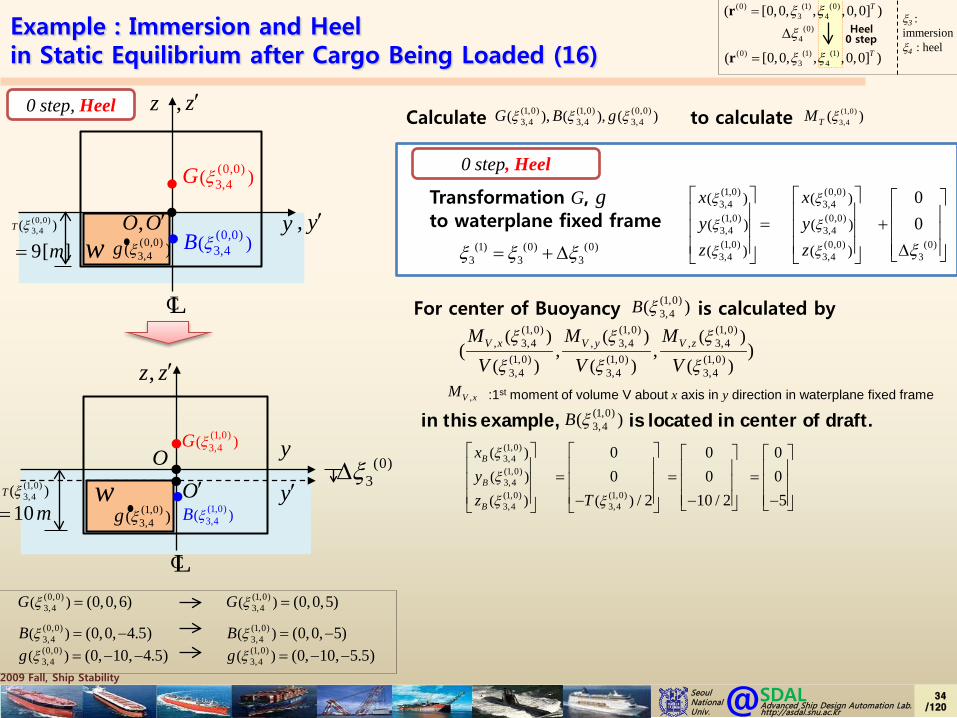
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (16)
y
z
LC
,O O′
(0,0)3,4( )G ξ
w
, z′
, y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ9[ ]m=
(0,0)3,4( )T ξ
y
,z z′
LC
O (0)3ξ∆
y′w(1,0)3,4( )g ξ
O′10m=
(1,0)3,4( )T ξ
(0,0)3,4( ) (0,0,6)G ξ =
(0,0)3,4( ) (0, 10, 4.5)g ξ = − −
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
(1,0)3,4( )
00
/ 2T ξ
= −
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
B
B
B
xyz
ξ
ξ
ξ
00
10 / 2
= −
005
= −
(0,0)3,4( ) (0,0, 4.5)B ξ = − (1,0)
3,4( ) (0,0, 5)B ξ = −
(1,0)3,4( )B ξ
(1,0)3,4( )G ξ
For center of Buoyancy is calculated by(1,0)3,4( )B ξ
in this example, is located in center of draft.(1,0)3,4( )B ξ
(1,0) (1,0) (1,0), 3,4 , 3,4 , 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )V x V y V zM M M
V V Vξ ξ ξ
ξ ξ ξ
,V xM :1st moment of volume V about x axis in y direction in waterplane fixed frame
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
ξ3 : immersionξ4 : heel
0 step, Heel
(0,0)3,4(0,0)3,4(0,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
0 step, Heel(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(0)3
00
ξ
+ ∆ (1) (0) (0)
3 3 3ξ ξ ξ= + ∆
to calculate (1,0)3,4( )TM ξCalculate (1,0) (1,0) (0,0)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
34/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (17)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )T B
T TG Ext Ext
gI g V zM M
mg z F z
ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
− − ⋅ ⋅= + ∆ + ⋅ − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
1
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( )T TG TB T ExtM M M Mξ ξ ξ ξ= + +1
(1,0) (1,0) (1,0)3,4 3,4 3,4
5
( ) ( ) ( )
0[ ] ( 3.6 10 )[ ] 0 [ ]TG G GM y F
m kN kN
ξ ξ ξ=
= × − × =(1,0) (1,0) (1,0)3,4 3,4 3,4
5
( ) ( ) ( )
0[ ] (4.0 10 )[ ] 0[ ]TB B BM y F
m kN kN
ξ ξ ξ=
= × × =(1,0) (1,0) (1,0)
, 3,4 3,4 3,4
(1,0) (1,0)3,4 3,4
4 5
( ) ( ) ( )
( ) ( )
[ ] [ ] [ ]10 ( 4.0 10 ) 4.0 10
T Ext Ext Ext
g Ext
m kN kN m
M y F
y F
ξ ξ ξ
ξ ξ
⋅
=
=
= − × − × = ×
(1,0)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(1,0) 43,4( ) 4.0 10 [ ]ExtF kNξ = − ×
(1,0) 53,4( ) 3.6 10 [ ]G NF kξ = − ×
5
5
0 0 4.0 10 [ ]4.0 10 [ ]
kN mkN m
= + + × ⋅
= × ⋅
0 step, Heel
Baseline
G
w g
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
(1,0)3,4( ) (0,0, 5)B ξ = −
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( )T TG TB T ExtM M M Mξ ξ ξ ξ= + +
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
35/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (18)
0 step, Heel2
(1, 0)3, 4
(1,0) (1,0) 33,4 3,4(1,0) 2
3,4( )
( ) ( )( )
12WP
sT
A
L BgI g y dx dy g
ξ
ξ ξξρ ρ ρ= =∫∫
(1, 0)3, 4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( )
( ) ( ) ( )B BV
gV z g dV zξ
ξ ξ ξρ ρ⋅ = ⋅ ⋅∫∫∫
(1,0) 53,4( ) 3.6 10 [ ] 5[ ]Gmg z kN mξ⋅ = × ×
m: Mass of the shipzG: Z coordinate of the center of mass of the ship
IT: 2nd moment of waterplane area with respect to x axis of the waterplane fixed frame
V: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
2
33 6100[ ] 40[ ]10[ / ] 5.333 10 [ ]
12[ ]m mkN m kN m
m×
= × = × ⋅
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )s Bg L B T zξ ξ ξ ξρ= ⋅ ⋅ ⋅ ⋅
310[ / ] 100[ ] 40[ ] 10[ ] ( 5[ ])kN m m m m m= × × × × −62.0 10 [ ]kN m= − × ⋅
61.8 10 [ ]kN m= × ⋅
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4
5( ) 4.0 10 [kN]BF ξ = ×(1,0) 43,4( ) 4.0 10 [kN]ExtF ξ = − ×
(1,0) 53,4( ) 3.6 10 [kN]GF ξ = − ×
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
(1,0)3,4( ) (0,0, 5)B ξ = −
,y y′
LC
Plan view
(1,0)3,4( )
40SB
m
ξ
=
,O O′ G
w, B
(1,0)3,4( ) 100L mξ =
,x x′
g
Baseline
G
w g
y
,z z′
LC
Section view
O
y′B(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
36/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (19)
0 step, Heel
m: Mass of the shipzG: Z coordinate of the center of mass of the ship
IT: 2nd moment of waterplane area with respect to x axis of the waterplane fixed frame
V: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
2(1,0)3,4( ), (0, 10, 5.5)g ξ = − −
(1,0) (1,0)3,4 3,4( ) ( )Ext ExtF zξ ξ⋅
(1,0) (1,0) (1,0)3,4 3,4 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )G B
T Ext Ext
mg z g V z
gI F z
ξ ξ ξ
ξ ξ ξ
ρ
ρ
⋅ − ⋅ ⋅
− − ⋅
6 6
6 5
6
1.8 10 [ ] 2.0 10 [ ]5.333 10 [ ] 2.2 10 [ ]1.7533 10 [ ]
kN m kN mkN m kN mkN m
= × ⋅ + × ⋅
− × ⋅ − × ⋅
= − × ⋅
(1,0) 43,4( ) 4.0 10 [ ]ExtF kNξ = − ×
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0) (1,0)3,4 3,4( ) ( )Ext gF zξ ξ= ⋅
( )44.0 10 [ ] 5.5 [ ]kN m= − × × −52.2 10 [ ]kN m= × ⋅
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
Baseline
G
w g
y
,z z′
LC
Section view
O
y′B(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
,y y′
LC
Plan view
(1,0)3,4( )
40SB
m
ξ
=
,O O′ G
w, B
(1,0)3,4( ) 100L mξ =
,x x′
g
ξ3 : immersionξ4 : heel
37/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
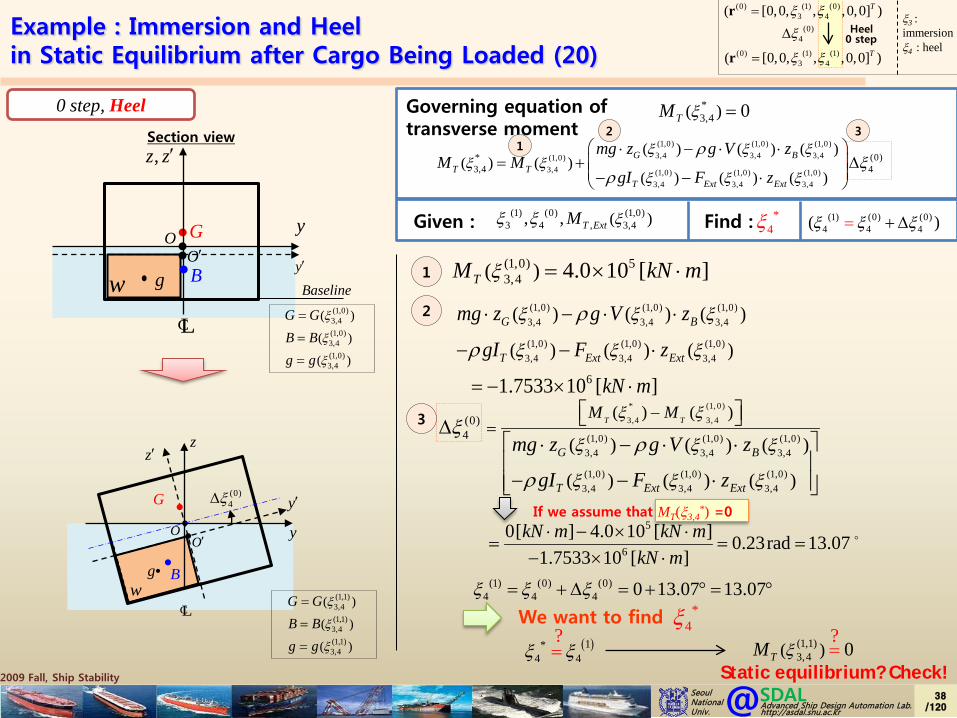
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (20)
0 step, Heel2 3
1
1(1,0) 53,4( ) 4.0 10 [ ]TM kN mξ = × ⋅
2 (1,0) (1,0) (1,0)3,4 3,4 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
6
( ) ( ) ( )
( ) ( ) ( )
1.7533 10 [ ]
G B
T Ext Ext
mg z g V z
gI F z
kN m
ξ ξ ξ
ξ ξ ξ
ρ
ρ
⋅ − ⋅ ⋅
− − ⋅
= − × ⋅* (1, 0)
3,4 3, 4
(1,0) (1,0) (1,0)3,4 3,4 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
(0)4
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
T T
G B
T Ext Ext
M M
mg z g V z
gI F z
ξ ξ
ξ ξ ξ
ξ ξ ξ
ξρ
ρ
−=
∆ ⋅ − ⋅ ⋅ − − ⋅
3
Static equilibrium? Check!
We want to find *4ξ
( )1*4 4ξ ξ=
? (1,1)3,4( ) 0TM ξ =
?
5
6
0[ ] 4.0 10 [ ] 0.23rad 13.071.7533 10 [ ]
kN m kN mkN m
⋅ − × ⋅= = =
− × ⋅
If we assume that MT(ξ3,4*) =0
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
y
z
LC
G y′
g B
(0)4ξ∆
w
O
z′
O′
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1) (0) (0)4 4 4 0 13.07 13.07ξ ξ ξ= + ∆ = + ° = °
Baseline
G
w g
y
,z z′
LC
Section view
O
y′B(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
38/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
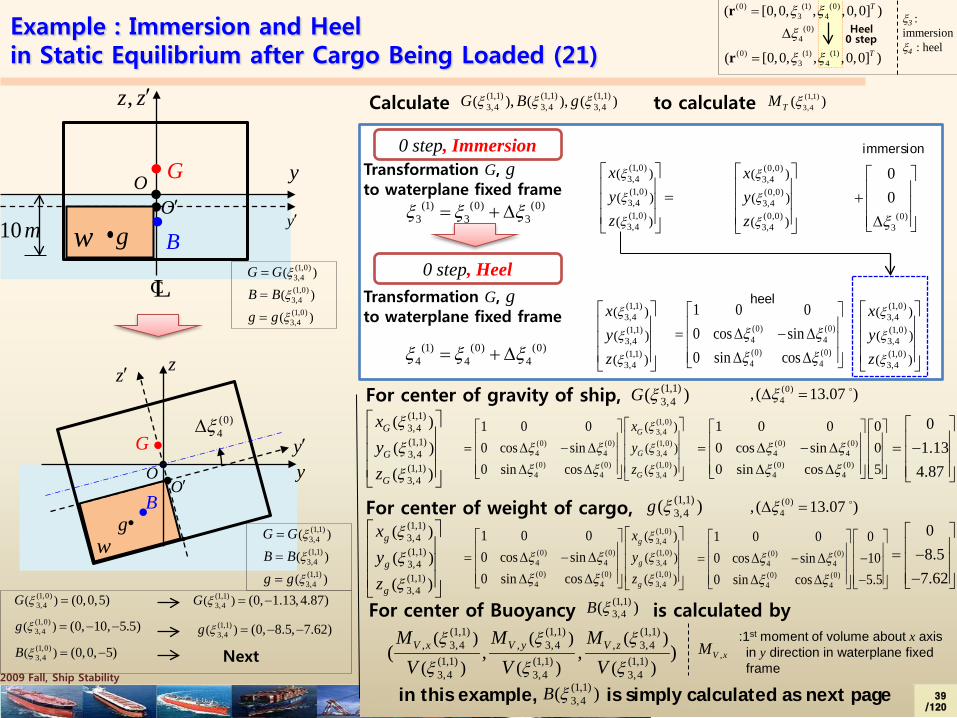
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (21)
y
,z z′
LC
OO′
y′w g10m
immersion(0,0)3,4(0,0)3,4(0,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(1,0)3,4( ) (0,0,5)G ξ =(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
0 step, Immersion(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(0)3
00
ξ
+ ∆
(1,0)3,4
(0) (0) (1,0)4 4 3,4(0) (0) (1,0)4 4 3,4
( )( )( )
1 0 00 cos sin0 sin cos
G
G
G
xyz
ξ
ξ
ξ
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4(1,1)3,4(1,1)3,4
( )( )( )
G
G
G
xyz
ξ
ξ
ξ
(1) (0) (0)3 3 3ξ ξ ξ= + ∆
01.13
4.87
= −
(1,1)3,4(1,1)3,4(1,1)3,4
( )( )( )
g
g
g
xyz
ξ
ξ
ξ
(0) (0)4 4(0) (0)4 4
1 0 0 00 cos sin 100 sin cos 5.5
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
08.5
7.62
= − −
B
G
(1,0)3,4( ) (0,0, 5)B ξ = −
0 step, Heel
(0) (0)4 4(0) (0)4 4
1 0 00 cos sin0 sin cos
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4(1,1)3,4(1,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(1) (0) (0)4 4 4ξ ξ ξ= + ∆
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
heel
(0) (0)4 4(0) (0)4 4
1 0 0 00 cos sin 00 sin cos 5
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4( ) (0, 1.13,4.87)G ξ = −
(1,1)3,4( ) (0, 8.5, 7.62)g ξ = − −
(1,0)3,4
(0) (0) (1,0)4 4 3,4(0) (0) (1,0)4 4 3,4
( )( )( )
1 0 00 cos sin0 sin cos
g
g
g
xyz
ξ
ξ
ξ
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(0)4, ( 13.07 )ξ∆ =
(0)4, ( 13.07 )ξ∆ =
Next
y
z
G
z′
y′
gB
(0)4ξ∆
w
O
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
Transformation G, gto waterplane fixed frame
O′
For center of gravity of ship, (1,1)3,4( )G ξ
For center of weight of cargo, (1,1)3,4( )g ξ
ξ3 : immersionξ4 : heel
For center of Buoyancy is calculated by(1,1)3,4( )B ξ
(1,1) (1,1) (1,1), 3,4 , 3,4 , 3,4
(1,1) (1,1) (1,1)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )V x V y V zM M M
V V Vξ ξ ξ
ξ ξ ξ,V xM
:1st moment of volume about x axisin y direction in waterplane fixedframe
in this example, is simply calculated as next page(1,1)3,4( )B ξ
to calculate (1,1)3,4( )TM ξCalculate (1,1) (1,1) (1,1)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
39/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
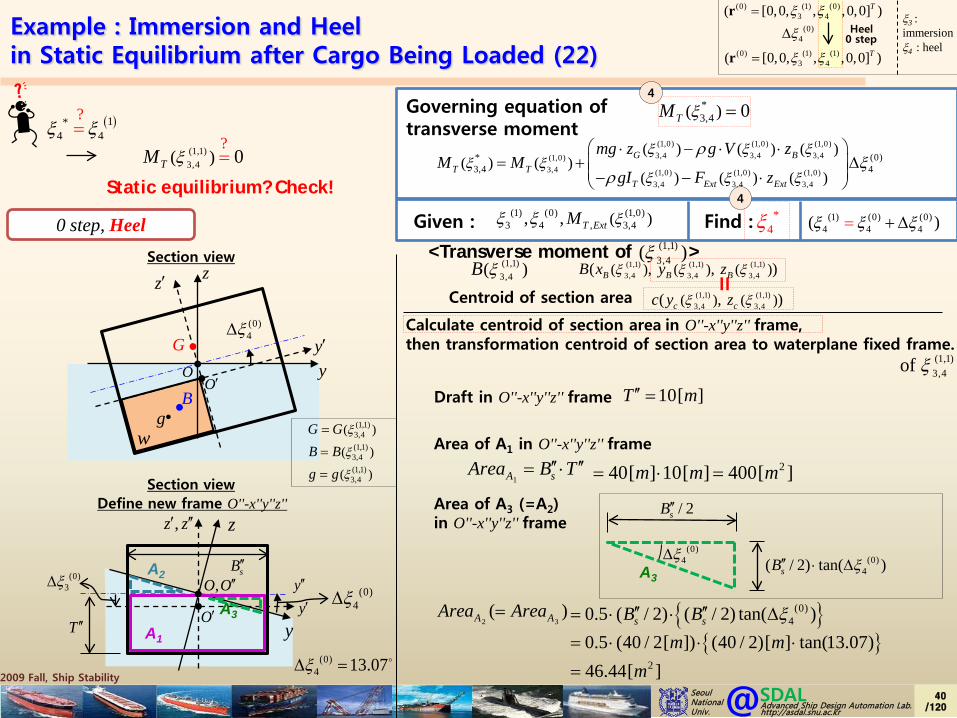
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (22)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
y
z,z z′ ′′
y′
(0)4 13.07ξ∆ =
(0)4ξ∆
A2
A3
A1
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=
Area of A1 in O''-x''y''z'' frame
1A sArea B T′′ ′′= ⋅ 240[ ] 10[ ] 400[ ]m m m= ⋅ =
10[ ]T m′′ =Draft in O''-x''y''z'' frame
(0)3ξ∆
T ′′
sB′′
2 3( )A AArea Area=
{ }0.5 (40 / 2[ ]) (40 / 2)[ ] tan(13.07)m m= ⋅ ⋅ ⋅246.44[ ]m=
Area of A3 (=A2)in O''-x''y''z'' frame
A3
/ 2sB′′
(0)4( / 2) tan( )sB ξ′′ ⋅ ∆
(0)4ξ∆
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B ξ
{ }(0)40.5 ( / 2) ( / 2) tan( )s sB B ξ′′ ′′= ⋅ ⋅ ∆
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
Define new frame O''-x''y''z''Section view
y′′
<Transverse moment of >(1,1)3,4( )ξ
,O O′′
O′
(1,1)3,4of ξ
40/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (23)
0 step, Heel
3 3( , )A Ay z′′ ′′ (1)
42 1, tan( )
2 3 2 3s sB B ξ′′ ′′ = ⋅ − ∆ ⋅
( )(40 / 2) (2 / 3), (40 / 2) tan(13.07) (1/ 3)= ⋅ − ⋅ ⋅
Centroid of A3 in O''-x''y''z'' frame,
Centroid of A1 in O''-x''y''z'' frame,
1 1( , )A Ay z′′ ′′
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
( )13.33, 1.55= −Centroid of A2 in O''-x''y''z'' frame,
2 2( , )A Ay z′′ ′′in similar way ( )13.33,1.55= −
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
A3
/ 2sB′′
(0)4
( / 2)
tan( )sB
ξ
′′
⋅ ∆
(0)4ξ∆
3Ay′′ 3Az′′
10(0, ) (0, ) (0, 5)2 2
T ′′= − = − = −
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
4
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
(1,1)3,4( ) 0TM ξ =
?
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
(1,1)3,4of ξ
y
z,z z′ ′′
y′
(0)4 13.07ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
B′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
41/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (24)
0 step, Heel
A1 400.00 0.00 -5.00 0.00 -2000.00
A2 46.44 -13.33 1.55 -619.14 71.88
A3 -46.44 13.33 -1.55 -619.14 71.88
Sum 400.00 -1,238.29 -1,856.25
3 3
, ,1 1
3 3
1 1
( , )
,Ai Ai
c c
A y A zi i
Ai Aii i
y z
M M
Area Area
′′ ′′= =
= =
′′ ′′ =
∑ ∑
∑ ∑
, AiA yM ′′ :1st moment of area Ai about x axis in y direction in O''-x''y''z'' frame
, AiA zM ′′ :1st moment of area Ai about y axis in z direction in O''-x''y''z'' frame
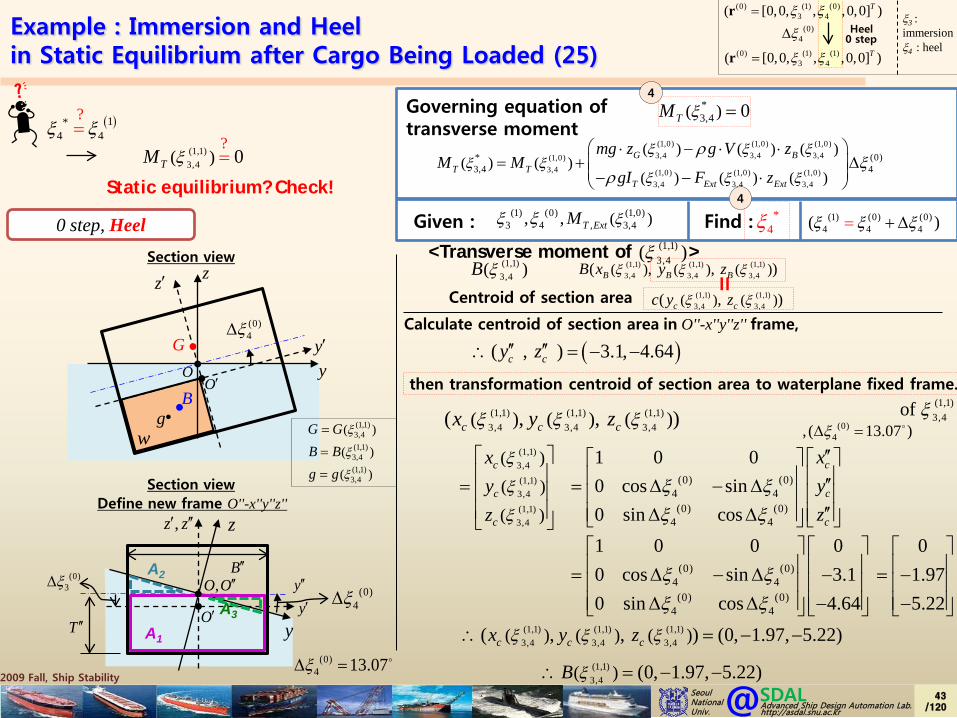
( )( , ) 0, 3.1, 4.64c cy z′′ ′′∴ = − −
iAy′′
, ( 1, 2,3)i =
,( )
AiA yM
′′
iAi AArea y′′×,
( )AiA z
M′′
iAi AArea z′′×
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
1,238.29 1,856.25,400 400
− − =
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
ξ3 : immersionξ4 : heel
AiArea
Centroid of section area in O''-x''y''z'' frame,
( )3.1, 4.64= − −
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
4
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
(1,1)3,4( ) 0TM ξ =
?
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
(1,1)3,4of ξ
y
z,z z′ ′′
y′
(0)4 13.07ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
B′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
iAz′′
42/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (25)
0 step, Heel
( )( , ) 3.1, 4.64c cy z′′ ′′∴ = − −
(1,1)3,4(1,1)3,4(1,1)3,4
( )( )( )
c
c
c
xyz
ξ
ξ
ξ
=
(1,1)3,4( ) (0, 1.97, 5.22)B ξ∴ = − −
(0) (0)4 4(0) (0)
4 4
1 0 0 00 cos sin 3.10 sin cos 4.64
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
(0)4, ( 13.07 )ξ∆ =
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
Calculate centroid of section area in O''-x''y''z'' frame,
then transformation centroid of section area to waterplane fixed frame.
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )c c cx y zξ ξ ξ
01.975.22
= − −
(0) (0)4 4(0) (0)
4 4
1 0 00 cos sin0 sin cos
c
c
c
xyz
ξ ξξ ξ
′′ ′′= ∆ − ∆
′′ ∆ ∆
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
4
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
(1,1)3,4( ) 0TM ξ =
?
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 1.97, 5.22)c c cx y zξ ξ ξ∴ = − −
ξ3 : immersionξ4 : heel
(1,1)3,4of ξ
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
y
z,z z′ ′′
y′
(0)4 13.07ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
B′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
43/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (26)
(1,1)3,4( )BF ξ
(1,1)3,4( )GF ξ
(1,1)3,4( )ExtF ξ (0,0)
3,44( ) 4.0 10 [ ]ExtF kNξ= = − ×
(0,0)3,4
5( ) 3.6 10 [ ]GF kNξ= = − ×
3 4 310[ / ] 4.0 10 [ ]kN m m= × ×
(1,1)3,4( )gV ξρ=
54.0 10 [ ]kN= ×
(1,1)3,4
(1,1)3,4
( )
( )V
V dVξ
ξ = ∫∫∫
0 step, Heel
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( )section area L ξ= ×
1
2[ ]400A mArea =
2
2[ ]46.44A mArea =
3
2[ ]46.44A mArea = −2
_ [ ]400A Total mArea =
2 4 3400[ ] 100[ ] 4.0 10 [ ]m m m= × = ×
(1,1)3,4_ ( )Area LA Total ξ= ×
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
4
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
(1,1)3,4( ) 0TM ξ =
?
Calculate force (1,1) (1,1) (1,1)3,4 3,4 3,4( ), ( ), ( )G B ExtF F Fξ ξ ξ
ξ3 : immersionξ4 : heel
<Transverse moment of >(1,1)3,4( )ξ
44/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (27)
0 step, Heel
stImmersion 1 step
<Transverse moment of (ξ3(1),ξ4
(1)) >
(1,1)3,4
(1,1) (1,1)3,4 3,4( ) () )(TB B BM y Fξ ξξ= ⋅
(1,1)3,4
(1,1) (1,1)3,4 3,4( ) () )(TG G GM y Fξ ξξ= ⋅
(1,1) (1,1) (1,1)3,4 3,4 3,4, ( ) ( ) ( )T Ext Ext ExtM y Fξ ξ ξ= ⋅
(1,1)3,4( )TM ξ
4
(1,1)3,4( ) 0TM ξ ≠ ( )1*
4 4ξ ξ≠
(1,1)3,4( ) (0, 1.13,4.87)G ξ = −(1,1)3,4( ) (0, 1.97, 5.22)B ξ = − −(1,1)3,4( ) (0, 8.5, 7.62)g ξ = − −
(1,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×
(1,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×
(1,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,1)3,4
(1,1)3,4
(1,1)3,4 ,( () )( ) T ExBG tT TM M Mξ ξξ= ++
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
5( 1.13) ( 3.6 10 )= − ⋅ − ×54.0709 10 [ ]kN m= × ⋅
5( 1.97) (4.0 10 )− ⋅ ×=57.8638 10 [ ]kN m= − × ⋅
(1,1) (1,1)3,4 3,4( ) ( )g Exty Fξ ξ= ⋅
4( 8.5) ( 4.0 10 )= − ⋅ − ×53.3988 10 [ ]kN m= × ⋅
[ ]kN m⋅5 5 54.0709 10 [ ] 7.8638 10 [ ] 3.3988 10kN m kN m= × ⋅ − × ⋅ + ×43.9415 10 [ ]kN m= − × ⋅
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0)3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
4
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Section view
(1,1)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
45/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
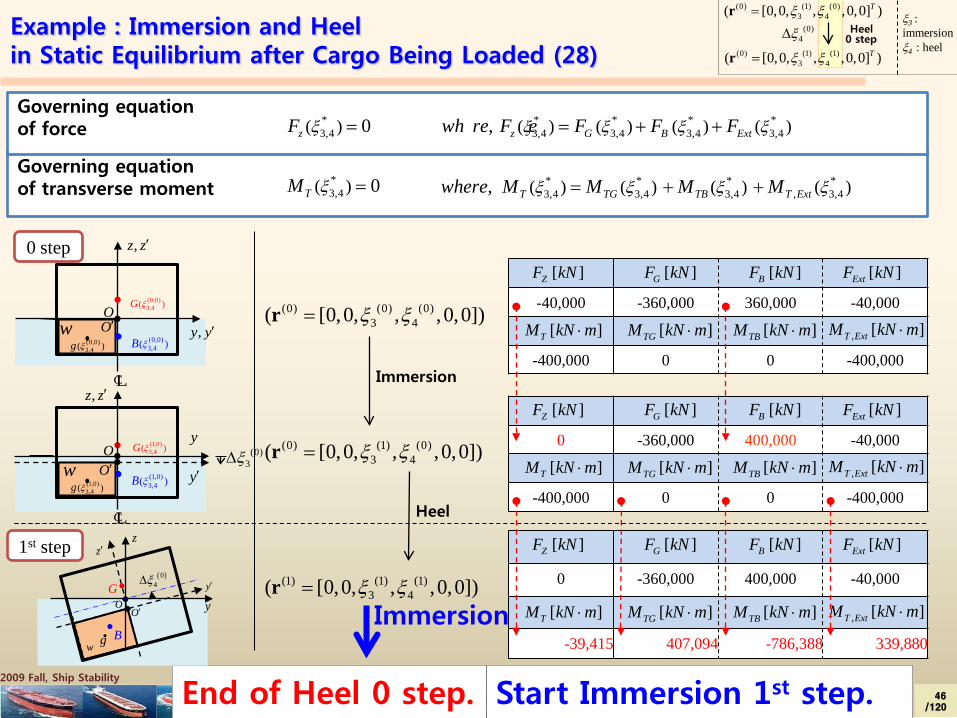
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (28)
0 step
(0) (0) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
-40,000 -360,000 360,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r 0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
Start Immersion 1st step.End of Heel 0 step.
Immersion
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
y
z
G
z′
y′
g B
( )04ξ∆
w
OO′
1st step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
LC
O′
(0,0)3,4( )G ξ
w
,z z′
,y y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ
O
(1,0)3,4( )G ξ
w(1,0)3,4( )g ξ
y
,z z′
LC
O
y′(1,0)3,4( )B ξ
(0)3ξ∆
O′
ξ3 : immersionξ4 : heel
46/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
w
OO′
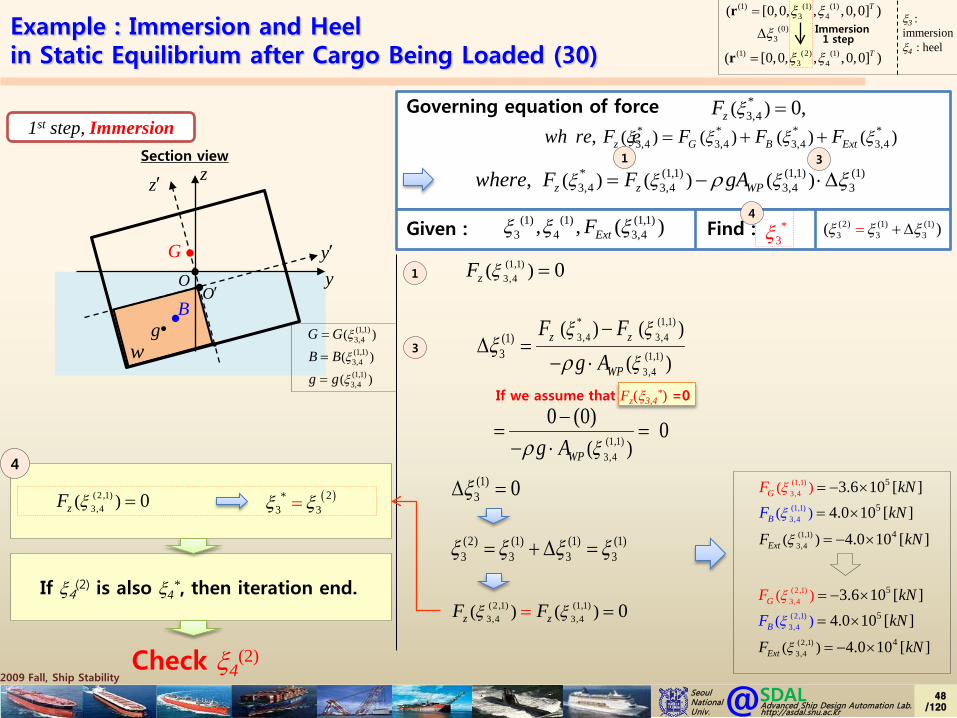
Section view* (1,1) (1,1) (1)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (29)
1st step, Immersion
(1,1)3,4( )BF ξ
(1,1)3,4( )GF ξ
(1,1) (1,1) (1,1) (1,1)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
(1,1)3,4( )ExtF ξ 44.0 10 [ ]kN= − ×
53.6 10 [ ]kN= − ×
3 4 310[ / ] 4.0 10 [ ]kN m m= × ×
(1,1)3,4( )gV ξρ=
54.0 10 [ ]kN= ×
(1,1) (1,1) (1,1) (1,1)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
5 5 43.6 10 [ ] 4.0 10 [ ] 4.0 10 [ ]kN kN kN= − × + × − ×0=
Total force is not changed during heel.
1
1
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
47/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* (1,1) (1,1) (1)3,4 3,4 3,4 3( ) ( ) ( ), z z WPwhere F F gAξ ξ ξρ ξ= − ⋅∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
1
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (30)
* (1,1)3,4 3,4
(1,1)3,4
(1)3
( ) ( )
( )z z
WP
F Fg A
ξ ξ
ξξ
ρ−
∆ =− ⋅
(1,1)3,4( ) 0zF ξ =1
3
3
(1)3 0ξ∆ =
4
(2 ,1)3,4( ) 0zF ξ = ( )2*
3 3ξ ξ=
If ξ4(2) is also ξ4
*, then iteration end.
Check ξ4(2)
4
(2) (1) (1) (1)3 3 3 3ξ ξ ξ ξ= + ∆ =
(2 ,1) (1,1)3,4 3,4( ) ( ) 0z zF Fξ ξ= =
If we assume that Fz(ξ3,4*) =0
1st step, Immersion
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
(1,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(1,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(1,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
(1,1)3,4( )
0 (0) 0WPg A ξρ
−= =
− ⋅
*3ξ
y
z
G
z′
y′
gB
w
OO′
Section view
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
48/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (31)
1st step
2nd step
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(2) (2) (2)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
End of Immersion 1st step.
Start Heel 1st step.
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
y
z
(1,1)3,4( )G ξ
z′
y′
(1,1)3,4( )g ξ
(1,1)3,4( )B ξ
w
OO′
y
z
(2,1)3,4( )G ξ
z′
y′
(2,1)3,4( )g ξ
(2,1)3,4( )B ξ
w
OO′
ξ3 : immersionξ4 : heel
49/120
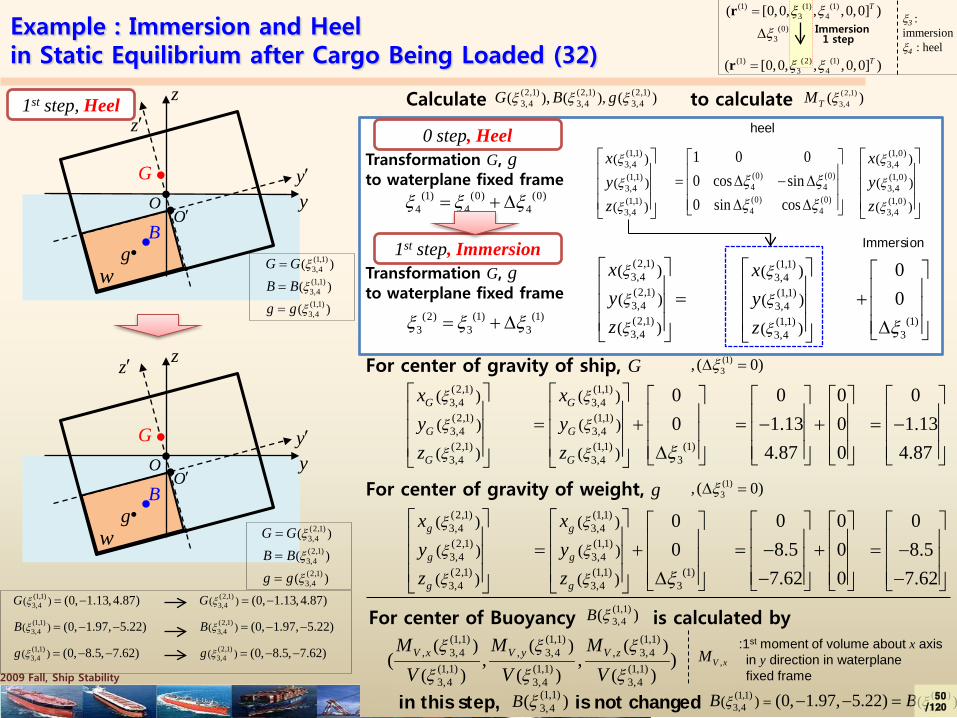
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (32)
0 step, Heel
(1) (0) (0)4 4 4ξ ξ ξ= + ∆
1st step, Immersion
(0) (0)4 4(0) (0)4 4
1 0 00 cos sin0 sin cos
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4(1,1)3,4(1,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(2) (1) (1)3 3 3ξ ξ ξ= + ∆
heel
Immersion
(1)3
00ξ
+ ∆
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(1,1)3,4(1,1)3,4(1,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
For center of gravity of ship, G (1)3, ( 0)ξ∆ =
(1,1)3,4(1,1)3,4(1,1) (1)3,4 3
( )
( )
( )
00
G
G
G
xyz
ξ
ξ
ξ ξ
= + ∆
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
G
G
G
xyz
ξ
ξ
ξ
0 01.13 0
4.87 0
= − +
01.13
4.87
= −
(1,1)3,4( ) (0, 1.13,4.87)G ξ = −
(1,1)3,4( ) (0, 1.97, 5.22)B ξ = − −
(1,1)3,4( ) (0, 8.5, 7.62)g ξ = − −
(2,1)3,4( ) (0, 1.13,4.87)G ξ = −
(2,1)3,4( ) (0, 1.97, 5.22)B ξ = − −
(2,1)3,4( ) (0, 8.5, 7.62)g ξ = − −
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
For center of gravity of weight, g (1)3, ( 0)ξ∆ =
(1,1)3,4(1,1)3,4(1,1) (1)3,4 3
( )
( )
( )
00
g
g
g
xyz
ξ
ξ
ξ ξ
= + ∆
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
g
g
g
xyz
ξ
ξ
ξ
0 08.5 0
7.62 0
= − + −
08.5
7.62
= − −
(1,1) (2,1)3,4 3,4( ) ( )(0, 1.97, 5.22)B Bξ ξ= − − =
Transformation G, gto waterplane fixed frame
y
z
G
z′
y′
gB
w
O
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
O′
y
z
G
z′
y′
gB
w
O
(2,1)3,4( )G G ξ=(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
For center of Buoyancy is calculated by(1,1)3,4( )B ξ
(1,1) (1,1) (1,1), 3,4 , 3,4 , 3,4
(1,1) (1,1) (1,1)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )V x V y V zM M M
V V Vξ ξ ξ
ξ ξ ξ,V xM
:1st moment of volume about x axisin y direction in waterplanefixed frame
in this step, is not changed(1,1)3,4( )B ξ
to calculate (2,1)3,4( )TM ξCalculate (2,1) (2,1) (2,1)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ1st step, Heel
50/120
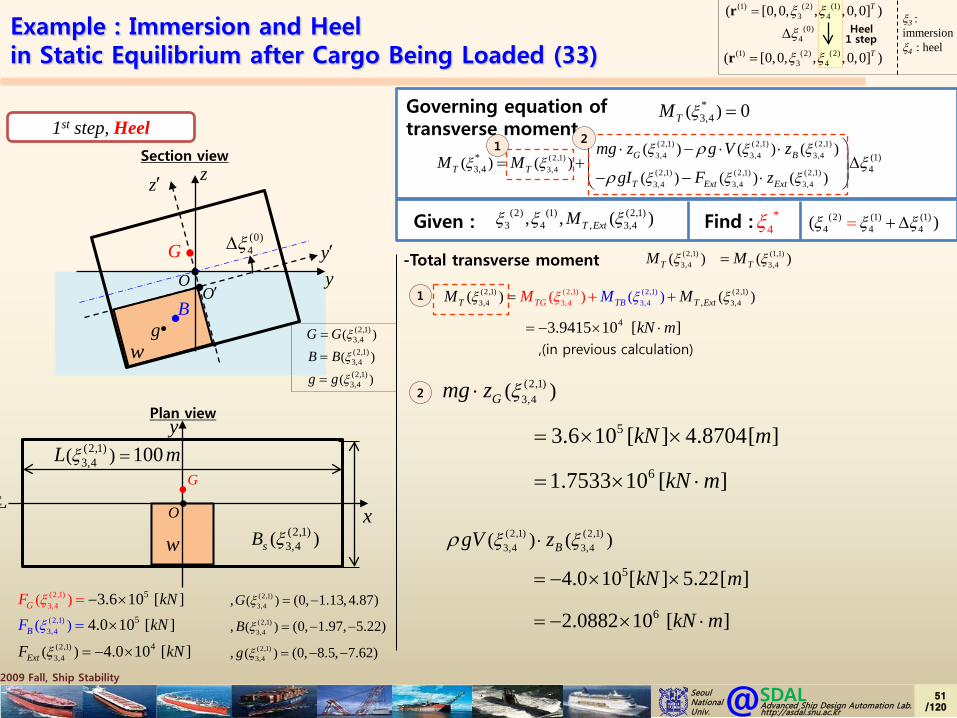
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (33)
1st step, Heel
-Total transverse moment
(2,1)3,
(2,1) (2,1)3,4 3
(2,1)3 ,4,44 ,( ) (( )( ) )TT T ExBTG tM MMMξ ξξ ξ+= +1
,(in previous calculation)
2
(2,1) (2,1)3,4 3,4( ) ( )BgV zξ ξρ ⋅
x
y
LC
Plan view
(2,1)3,4( )sB ξ
O
G
w
(2,1)3,4( ) 100L mξ =
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
12
(2,1)3,4( ), (0, 1.13,4.87)G ξ = −(2,1)3,4( ), (0, 1.97, 5.22)B ξ = − −(2,1)3,4( ), (0, 8.5, 7.62)g ξ = − −
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
(2,1)3,4( )TM ξ (1,1)
3,4( )TM ξ=
43.9415 10 [ ]kN m= − × ⋅
54.0 10 [ ] 5.22[ ]kN m= − × ×
62.0882 10 [ ]kN m= − × ⋅
y
z
G
z′
y′
gB
(0)4ξ∆
w
OO′
Section view
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
(2,1)3,4( )Gmg z ξ⋅
53.6 10 [ ] 4.8704[ ]kN m= × ×
61.7533 10 [ ]kN m= × ⋅
51/120
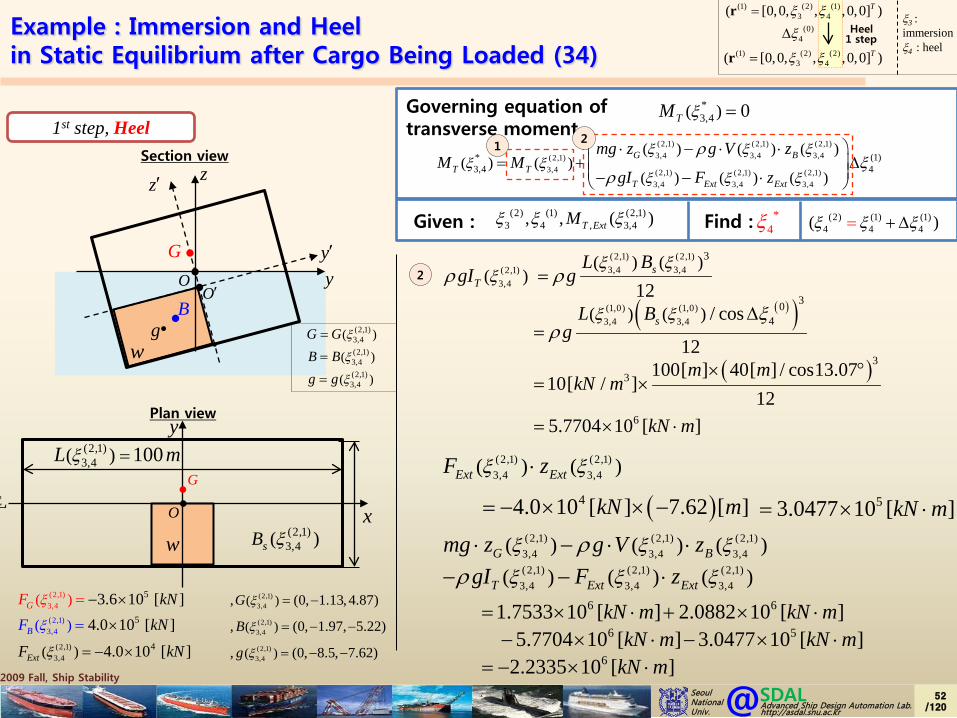
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (34)
(2,1) (2,1)3,4 3,4( ) ( )Ext ExtF zξ ξ⋅
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( ) ( )( ) ( ) ( )
G B
T Ext Ext
mg z g V zgI F z
ξ ξ ξξ ξ ξ
ρρ
⋅ − ⋅ ⋅− − ⋅
6 6
6 5
6
1.7533 10 [ ] 2.0882 10 [ ]5.7704 10 [ ] 3.0477 10 [ ]
2.2335 10 [ ]
kN m kN mkN m kN m
kN m
= × ⋅ + × ⋅− × ⋅ − × ⋅
= − × ⋅
2
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
( )44.0 10 [ ] 7.62 [ ]kN m= − × × −
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
12
x
y
LC
Plan view
(2,1)3,4( )sB ξ
O
G
w
(2,1)3,4( ) 100L mξ =
y
z
G
z′
y′
gB
w
OO′
Section view
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
ξ3 : immersionξ4 : heel
(2,1)3,4( ), (0, 1.13,4.87)G ξ = −(2,1)3,4( ), (0, 1.97, 5.22)B ξ = − −(2,1)3,4( ), (0, 8.5, 7.62)g ξ = − −
(2,1) (2,1)3,4 3,4(2,1)
3,4
3( ) ( )( )
12s
T
L BgI g
ξ ξξρ ρ=
( )( )(1,0) (1,0)3,4 3,4
304( ) ( ) / cos
12sL B
gξ ξ ξ
ρ∆
=
( )33 100[ ] 40[ ] / cos13.07
10[ / ]12
m mkN m
× °= ×
65.7704 10 [ ]kN m= × ⋅
53.0477 10 [ ]kN m= × ⋅
52/120
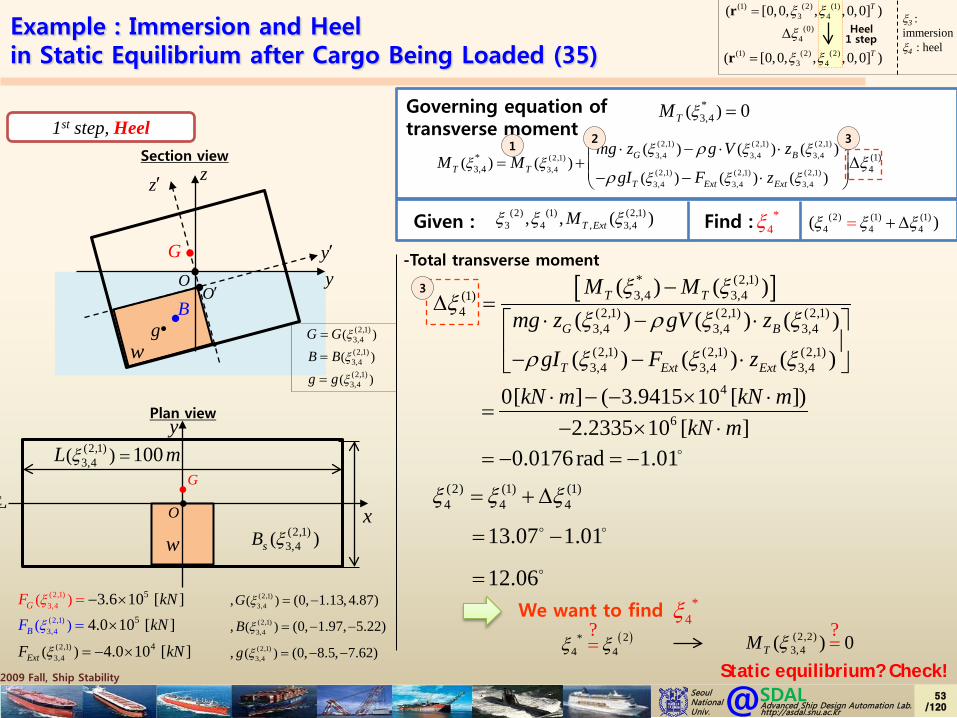
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (35)
-Total transverse moment
[ ]* (2,1)3,4 3,4(1)
4 (2,1) (2,1) (2,1)3,4 3,4 3,4
(2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( )( ) ( ) ( )
( ) ( ) ( )
T T
G B
T Ext Ext
M Mmg z gV z
gI F z
ξ ξξ
ξ ρ ξ ξ
ρ ξ ξ ξ
−∆ =
⋅ − ⋅ − − ⋅
(2) (1) (1)4 4 4ξ ξ ξ= + ∆
3
Static equilibrium? Check!
We want to find *4ξ
( )2*4 4ξ ξ=
? (2,2)3,4( ) 0TM ξ =
?
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
12 3
4
6
0[ ] ( 3.9415 10 [ ])2.2335 10 [ ]
kN m kN mkN m
⋅ − − × ⋅=
− × ⋅0.0176 rad 1.01= − = −
13.07 1.01= −
12.06=
x
y
LC
Plan view
(2,1)3,4( )sB ξ
O
G
w
(2,1)3,4( ) 100L mξ =
y
z
G
z′
y′
gB
w
OO′
Section view
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
ξ3 : immersionξ4 : heel
(2,1)3,4( ), (0, 1.13,4.87)G ξ = −(2,1)3,4( ), (0, 1.97, 5.22)B ξ = − −(2,1)3,4( ), (0, 8.5, 7.62)g ξ = − −
53/120
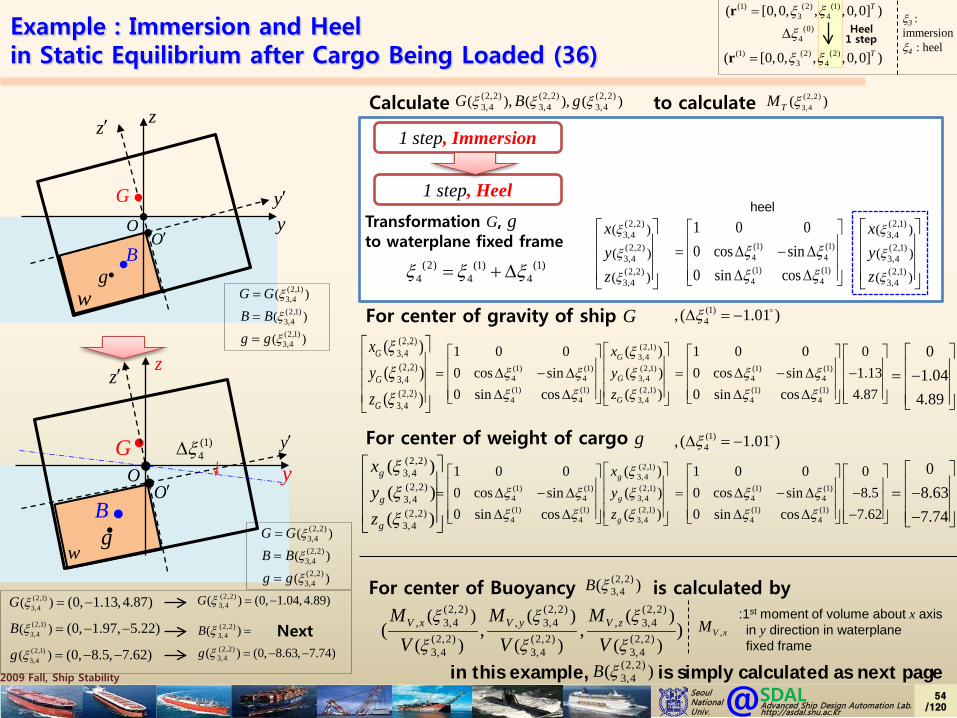
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (36)
(2,2)3,4( ) (0, 1.04,4.89)G ξ = −
(2,2)3,4( )B ξ =(2,2)3,4( ) (0, 8.63, 7.74)g ξ = − −
z
G
z′
g
y
w
O
BO′
y′
1 step, Immersion
1 step, Heel
(1) (1)4 4(1) (1)4 4
1 0 00 cos sin0 sin cos
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(2,2)3,4(2,2)3,4(2,2)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(2) (1) (1)4 4 4ξ ξ ξ= + ∆
heel
(2,1)3,4
(1) (1) (2,1)4 4 3,4(1) (1) (2,1)4 4 3,4
1 0 0 ( )0 cos sin ( )0 sin cos ( )
G
G
G
xyz
ξξ ξ ξξ ξ ξ
= ∆ − ∆ ∆ ∆
(2,2)3,4(2,2)3,4(2,2)3,4
( )( )( )
G
G
G
xyz
ξξξ
01.04
4.89
= −
For center of gravity of ship G
For center of weight of cargo g(2,2)3,4(2,2)3,4(2,2)3,4
( )( )( )
g
g
g
xyz
ξξξ
(1) (1)4 4(1) (1)4 4
1 0 0 00 cos sin 8.50 sin cos 7.62
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
08.637.74
= − −
(1) (1)4 4(1) (1)4 4
1 0 0 00 cos sin 1.130 sin cos 4.87
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆
(2,1)3,4
(1) (1) (2,1)4 4 3,4(1) (1) (2,1)4 4 3,4
1 0 0 ( )0 cos sin ( )0 sin cos ( )
g
g
g
xyz
ξξ ξ ξξ ξ ξ
= ∆ − ∆ ∆ ∆
(1)4, ( 1.01 )ξ∆ = −
(1)4, ( 1.01 )ξ∆ = −
Next
y
z
G
z′
y′
gB
(1)4ξ∆
w
O
(2,1)3,4( )G G ξ=(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
O′
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
For center of Buoyancy is calculated by(2,2)3,4( )B ξ
(2,2) (2,2) (2,2), 3,4 , 3,4 , 3,4
(2,2) (2,2) (2,2)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )V x V y V zM M M
V V Vξ ξ ξ
ξ ξ ξ,V xM
:1st moment of volume about x axisin y direction in waterplanefixed frame
in this example, is simply calculated as next page(2,2)3,4( )B ξ
(2,1)3,4( ) (0, 1.13,4.87)G ξ = −(2,1)3,4( ) (0, 1.97, 5.22)B ξ = − −(2,1)3,4( ) (0, 8.5, 7.62)g ξ = − −
to calculate (2,2)3,4( )TM ξCalculate (2,2) (2,2) (2,2)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
54/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (37)
4
1st step, Heel
A1 400.00 0.00 -5.00 0.00 -2000.00
A2 42.73 -13.33 1.42 -569.75 60.86
A3 -42.73 13.33 -1.42 -569.75 60.86
Sum 400.00 -1,139.49 -1,878.27
3 3
, ,1 1
3 3
1 1
( , )
,Ai Ai
c c
A y A zi i
Ai Aii i
y z
M M
Area Area
′′ ′′= =
= =
′′ ′′ =
∑ ∑
∑ ∑
(2)4 12.06ξ =
, AiA yM ′′ :1st moment of area Ai about x axis in y direction in O''-x''y''z'' frame,
, AiA zM ′′ :1st moment of area Ai about x axis in z direction in O''-x''y''z'' frame,
( )( , ) 2.85, 4.7c cy z′′ ′′∴ = − −
iAy′′iAz′′
,( )AiA yM
i iA AArea y′′×,( )
AiA zMi iA AArea z′′×
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
iAArea
Centroid of section area inO''-x''y''z'' frame,
( )0, 2.85, 4.7= − −
, ( 1, 2,3)i =
1,139.49 1,878.27,400 400
− − =
z
G
z′
g
y
w
O
BO′
y′( )14ξ∆
(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
(2,2)3,4( )G G ξ=
<Transverse moment of >(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,2) (2,2)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=(2,2)3,4( )B ξ
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
(2,2)3,4( )ξ
y
z,z z′ ′′
y′(2)
4ξA2
A3
A1
(0)3ξ∆
T ′′
B′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(2,2)3,4of ξ
55/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z
G
z′
g
y
w
O
BO′
y′( )14ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (38)
1st step, Heel
(2,2)3,4(2,2)3,4(2,2)3,4
( )( )( )
c
c
c
xyz
ξξξ
=
(2,2)3,4( ) (0, 1.8, 5.19)B ξ∴ = − −
(2) (2)4 4(2) (2)
4 4
1 0 0 00 cos sin 2.850 sin cos 4.7
ξ ξξ ξ
= − − −
(2)4 1, ( )2.06ξ =
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
01.825.19
= − −
(2) (2)4 4(2) (2)
4 4
1 0 00 cos sin0 sin cos
c
c
c
xyz
ξ ξξ ξ
′′ ′′= −
′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
(2,2)3,4( )G G ξ=
( )( , ) 2.85, 4.7c cy z′′ ′′∴ = − −Calculate centroid of section area in body fixed frame,
then transformation centroid of section area to waterplane fixed frame.
(2 ,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )c c cx y zξ ξ ξ
<Transverse moment of >(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,2) (2,2)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area
=(2,2)3,4( )B ξ
(2 ,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 1.8, 5.19)c c cx y zξ ξ ξ = − −
ξ3 : immersionξ4 : heel
(2,2)3,4( )ξ
(2)4 12.06ξ =
y
z,z z′ ′′
y′(2)
4ξA2
A3
A1
(0)3ξ∆
T ′′
B′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(2,2)3,4of ξ
56/120
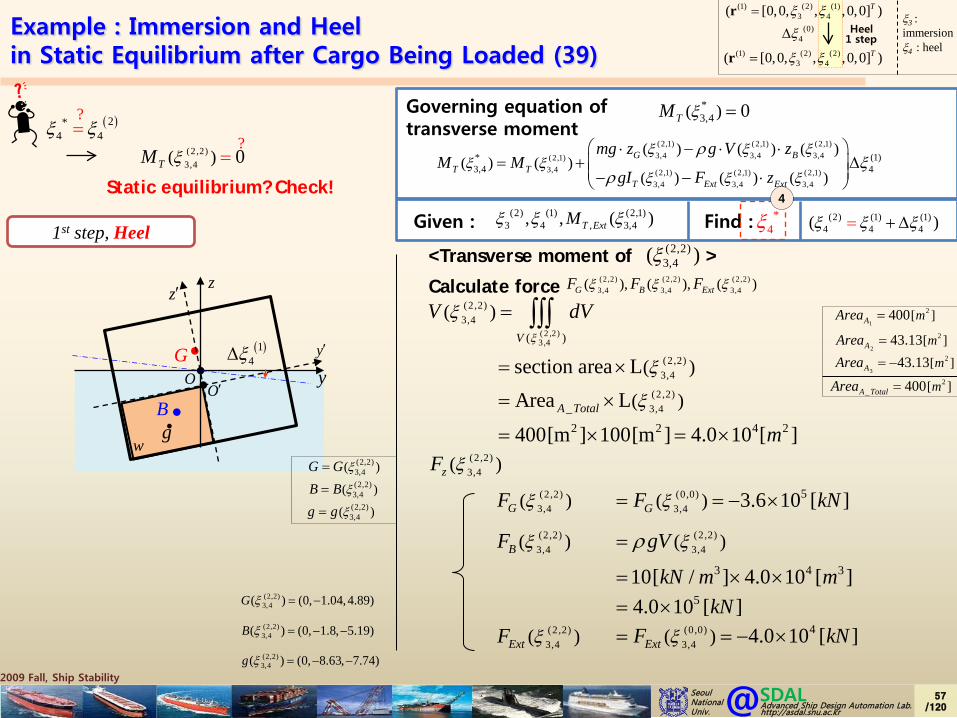
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (39)
1st step, Heel
(2,2)3,4( )BF ξ
(2,2)3,4( )GF ξ
(2,2)3,4( )zF ξ
(2,2)3,4( )ExtF ξ (0,0)
3,44( ) 4.0 10 [ ]ExtF kNξ= = − ×
(0,0)3,4
5( ) 3.6 10 [ ]GF kNξ= = − ×
3 4 310[ / ] 4.0 10 [ ]kN m m= × ×
(2,2)3,4( )gV ξρ=
54.0 10 [ ]kN= ×
<Transverse moment of >
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
( 2 ,2)3,4
(2,2)3,4
( )
( )V
V dVξ
ξ = ∫∫∫(2,2)3,4( )section area L ξ= ×
1
2[ ]400A mArea =
2
2[ ]43.13A mArea =
3
2[ ]43.13A mArea = −2
_ [ ]400A Total mArea =
2 2 4 2400[m ] 100[m ] 4.0 10 [ ]m= × = ×
(2,2)3,4_ ( )Area LA Total ξ= ×
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
z
G
z′
g
y
w
O
BO′
y′( )14ξ∆
(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
(2,2)3,4( )G G ξ=
Calculate force (2,2) (2,2) (2,2)3,4 3,4 3,4( ), ( ), ( )G B ExtF F Fξ ξ ξ
(2,2)3,4( ) (0, 1.8, 5.19)B ξ = − −
ξ3 : immersionξ4 : heel
(2,2)3,4( )ξ
(2,2)3,4( ) (0, 1.04,4.89)G ξ = −
(2,2)3,4( ) (0, 8.63, 7.74)g ξ = − −
57/120
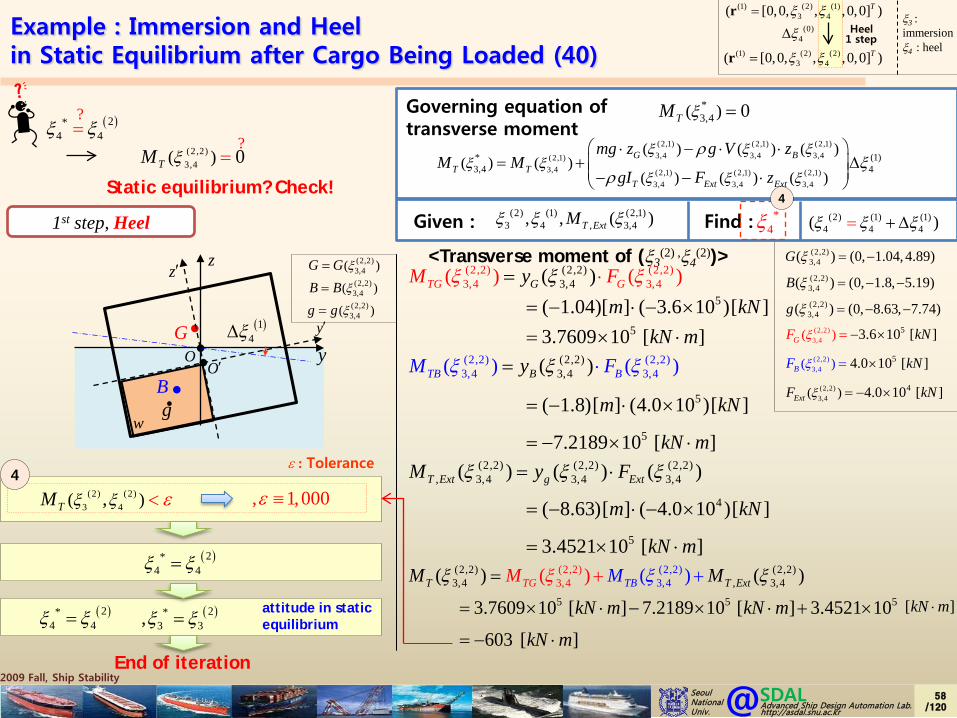
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z
G
z′
g
y
w
O
BO′
y′( )14ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (40)
1st step, Heel
<Transverse moment of (ξ3(2) ,ξ4
(2))>
(2,2)3,4
(2,2) (2,2)3,4 3,4( ) () )(TB B BM y Fξ ξξ ⋅=
(2,2)3,4
(2,2) (2,2)3,4 3,4( ) () )(TG G GM y Fξ ξξ ⋅=
(2,2) (2,2) (2,2), 3,4 3,4 3,4( ) ( ) ( )T Ext g ExtM y Fξ ξ ξ= ⋅
(2,2)3,
(2,2) (2,2)3,4 , 3,4
(2,2)3 44 ,( )) (( )( )TT T ExBTG tM MMMξ ξξ ξ+= +
[ ]kN m⋅
(2) (2)3 4( ),TM ξ ξ ε< , 1,000ε ≡
( )2*4 4ξ ξ=
End of iteration
ε : Tolerance
attitude in static equilibrium
( )2*4 4ξ ξ= ( )2*
3 3,ξ ξ=
(2,2)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×
(2,2)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×
(2,2)3,4
4( ) 4.0 10 [ ]ExtF kNξ = − ×
(2,2)3,4( ) (0, 1.04,4.89)G ξ = −(2,2)3,4( ) (0, 1.8, 5.19)B ξ = − −(2,2)3,4( ) (0, 8.63, 7.74)g ξ = − −
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
4
5( 1.04)[ ] ( 3.6 10 )[ ]m kN= − ⋅ − ×53.7609 10 [ ]kN m= × ⋅
5( 1.8)[ ] (4.0 10 )[ ]m kN= − ⋅ ×57.2189 10 [ ]kN m= − × ⋅
4( 8.63)[ ] ( 4.0 10 )[ ]m kN= − ⋅ − ×53.4521 10 [ ]kN m= × ⋅
5 5 53.7609 10 [ ] 7.2189 10 [ ] 3.4521 10kN m kN m= × ⋅ − × ⋅ + ×
603 [ ]kN m= − ⋅
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1)3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( )G B
T TT Ext Ext
mg z g V zM M
gI F z
ξ ξ ξξ ξ
ξ ξ ξ
ρξ
ρ
⋅ − ⋅ ⋅= + ∆ − − ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
(2,2)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
58/120
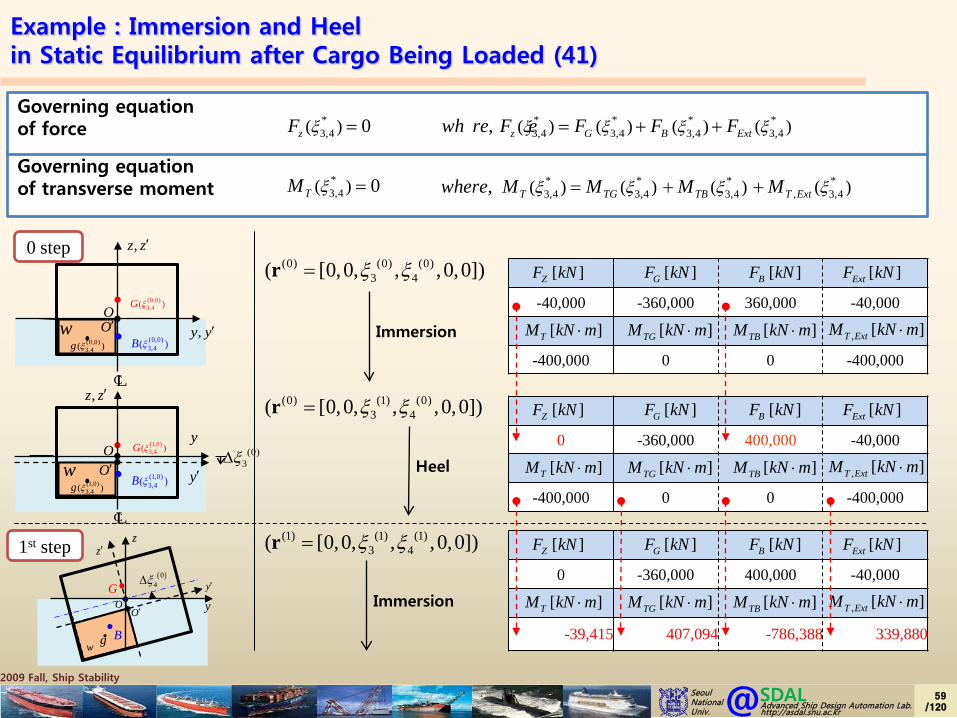
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
-40,000 -360,000 360,000 -40,000
-400,000 0 0 -400,000
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (41)
(0) (0) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅Immersion
0 step
1st step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
y
z
G
z′
y′
g B
( )04ξ∆
w
OO′
LC
O′
(0,0)3,4( )G ξ
w
,z z′
,y y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ
O
(1,0)3,4( )G ξ
w(1,0)3,4( )g ξ
y
,z z′
LC
O
y′(1,0)3,4( )B ξ
(0)3ξ∆
O′
59/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
Example : Immersion and Heel in Static Equilibrium after Cargo Being Loaded (42)
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(2) (2) (2)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-39,415 407,094 -786,388 339,880
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-603 376,091 -721,898 345,205
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
End of Heel 1st step. ξ3*=ξ3
(2), ξ4*=ξ4
(2) → END
1st step
2nd step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
y
z
(1,1)3,4( )G ξ
z′
y′
(1,1)3,4( )g ξ
(1,1)3,4( )B ξ
w
OO′
y
z
(2,1)3,4( )G ξ
z′
y′
(2,1)3,4( )g ξ
(2,1)3,4( )B ξ
w
OO′
z
(2,2)3,4( )G ξ
z′
(2,2)3,4( )g ξ
y
w
O(2,2)3,4( )B ξ
y′( )14ξ∆
60/120
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Sec.1 Example : Immersion in Static Equilibrium
after Cargo Being Loaded
Sec.2 Example : Immersion and Heel in Static Equilibrium
after Cargo Being Loaded
Sec.3 Example : Immersion and Heel in Static Equilibrium
after Cargo Hold Being Flooded
61/120

2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
v g
y
z
LC
,O O′
z′
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (1)
Given : Cargo hold dimensionWeight of ship : 360,000 [kN]
Find : Immersion and trim of ship in static equilibrium
Example) Find a ship’s attitude in Static Equilibrium after cargo hold in right side of midship being flooded. (Origin of waterplane fixed frame is located in the intersection point between centerline and LCF(Longitudinal center of floating))
Assumption : considering force and transverse momentwith immersion and heel
( due to cargo being loaded on LCF. No trim) 3 4, ( [0,0, , ,0,0] )Tξ ξ=r
O-xyz frame: Waterplane fixed frameO'-x'y'z' frame: Body fixed frame
Position vector of the origin of the body fixed frame with respect to the waterplane fixed frame
Rotation vector of the origin of the body fixed frame with respect to thewaterplane fixed frame
y
z
LC
Section view(Front view)
OBaseline
K
G
, z′
, y′Bv g
,O O′Immersion
y′
G
v g B ξ3* : immersion in
static equilibrium
y
z
LC
,O O′
z′
y′
G
w g B
*4 ?ξ
ξ4* : heel in
static equilibrium
Heel
*3 ?ξ
Plan view (Top view)
x
y
LC
20m
,O O′G , x′
, y′
, B
100m
v : flooded volume
62/120
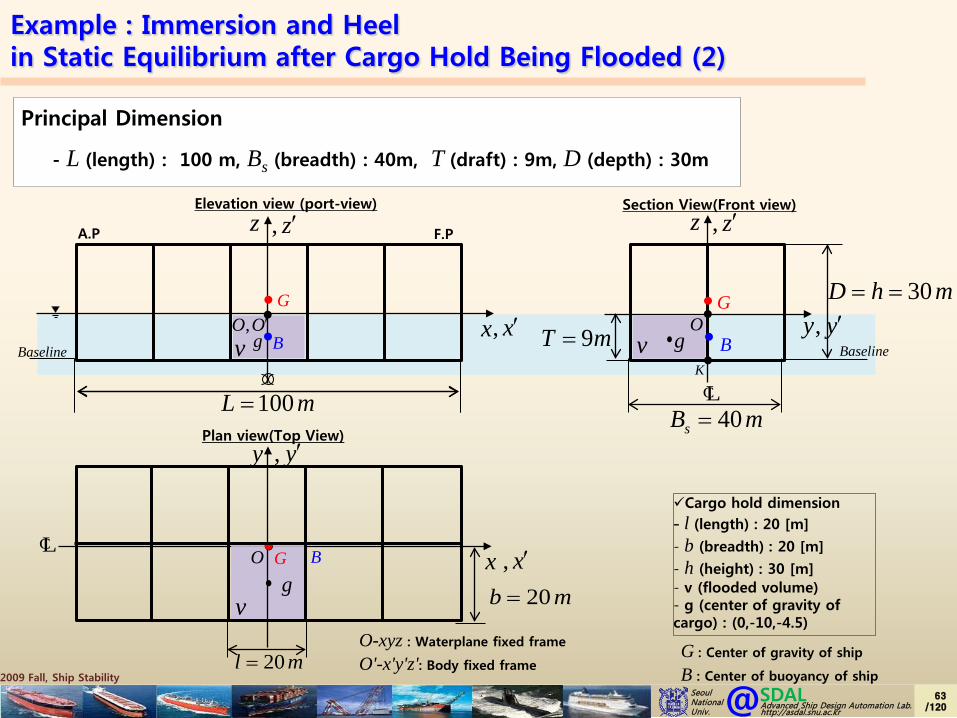
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
G : Center of gravity of ship
B : Center of buoyancy of ship
Cargo hold dimension- l (length) : 20 [m]
- b (breadth) : 20 [m]
- h (height) : 30 [m]- v (flooded volume)- g (center of gravity of cargo) : (0,-10,-4.5)
40sB m=
30D h m= =
9T m= y
z
LC
Section View(Front view)
OBaseline
K
G
v
, z′
, y′g B
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (2)
Principal Dimension
- L (length) : 100 m, Bs (breadth) : 40m, T (draft) : 9m, D (depth) : 30m
20b m=
Elevation view (port-view)
x
z
Baseline
,O O′G
F.PA.P
v, x′
, z′
B
100L m=
g
Plan view(Top View)
x
y
LC O G
v
, x′
, y′
, B
O-xyz : Waterplane fixed frame
O'-x'y'z': Body fixed frame
g
20l m=63
/120
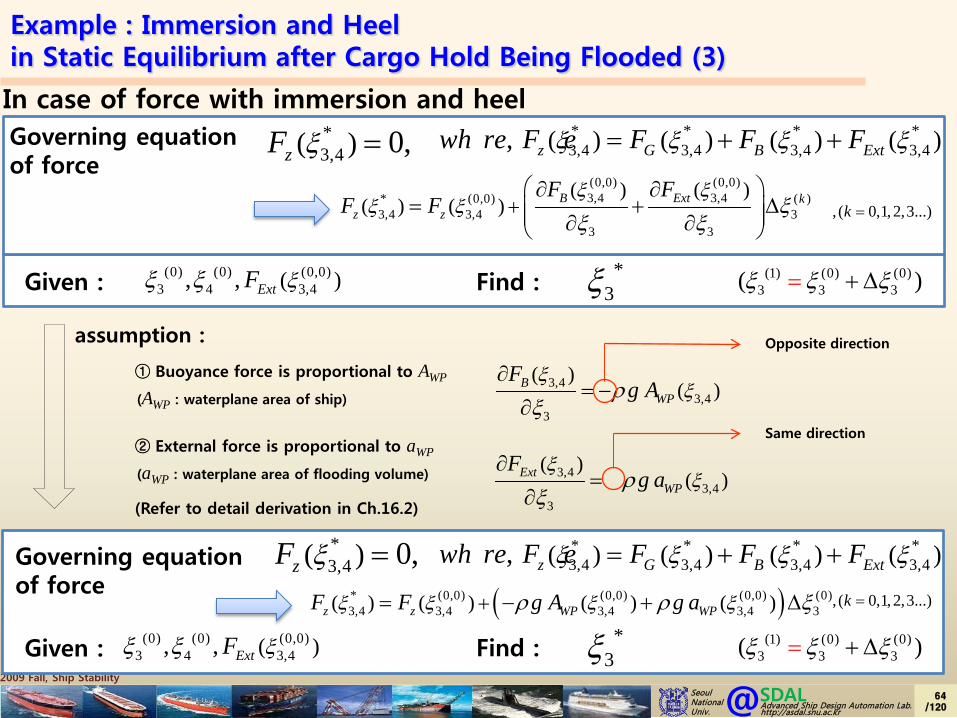
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
In case of force with immersion and heel
Governing equationof force
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (3)
Governing equationof force
Given : Find :
*3,4( ) 0,zF ξ = * * * *
3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
*3ξ(0) (0) (0,0)
3 4 3,4( ), , ExtF ξξ ξ
(0,0) (0,0)3,4 3,4* (0,0) ( )
3,4 3,4 33 3
( ) ( )( ) ( ) B Ext k
z z
F FF F
ξ ξξ ξ ξ
ξ ξ+
∂ ∂= + ∆ ∂ ∂
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
, ( 0,1, 2,3...)k =
assumption :
3,43,4
3
( )( )B
WP
Fg A
ξξρ
ξ∂
= −∂
① Buoyance force is proportional to AWP
(AWP : waterplane area of ship)
② External force is proportional to aWP
(aWP : waterplane area of flooding volume) 3,43,4
3
( )( )Ext
WP
Fg a
ξξρ
ξ∂
=∂
*3,4( ) 0,zF ξ = * * * *
3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
( )* (0,0) (0,0) (0,0) (0)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ+= − + ∆
Given : (0) (0) (0,0)3 4 3,4( ), , ExtF ξξ ξ Find : *
3ξ (1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
, ( 0,1, 2,3...)k =
(Refer to detail derivation in Ch.16.2)
Opposite direction
Same direction
64/120
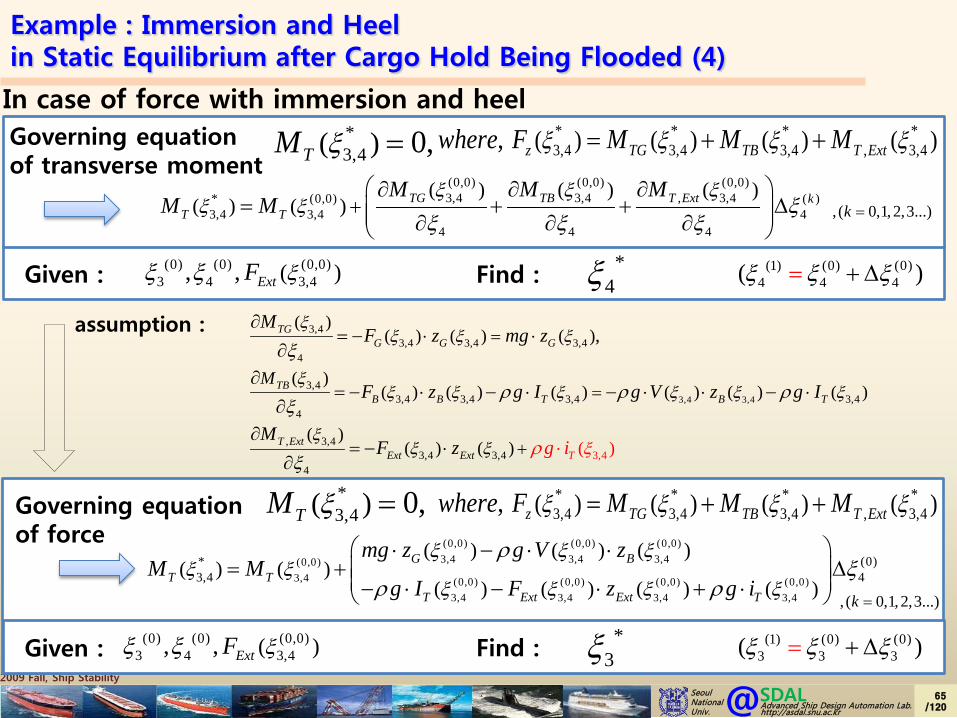
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
In case of force with immersion and heel
Governing equationof force
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (4)
Governing equationof transverse moment
Given : Find :
*3,4( ) 0,TM ξ = * * * *
3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), z TG TB T Extwhere F M M Mξ ξ ξ ξ= + +
*4ξ(0) (0) (0,0)
3 4 3,4( ), , ExtF ξξ ξ
(0,0) (0,0) (0,0)3,4 3,4 , 3,4* (0,0) ( )
3,4 3,4 44 4 4
( ) ( ) ( )( ) ( ) TG TB T Ext k
T T
M M MM M
ξ ξ ξξ ξ ξ
ξ ξ ξ+
∂ ∂ ∂= + + ∆ ∂ ∂ ∂
(1) (0) (0)4 4 4( )ξ ξ ξ+ ∆=
, ( 0,1, 2,3...)k =
assumption :
*3,4( ) 0,TM ξ = * * * *
3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), z TG TB T Extwhere F M M Mξ ξ ξ ξ= + +(0,0) (0,0) (0,0)3,4 3,4 3,4(0,0)
3,4 (0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )G B
T TT Ext Ext T
mg z g V zM M
g I F z g i
ξ ξ ξξ ξ
ξ ξ ξ ξ
ρξ
ρ ρ
⋅ − ⋅ ⋅= + ∆ − ⋅ − ⋅ + ⋅
Given : (0) (0) (0,0)3 4 3,4( ), , ExtF ξξ ξ Find : *
3ξ (1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
, ( 0,1, 2,3...)k =
3,4 3,43,4
3,4 3,4 3,4 3,44
( )( ) ( ) ( ) ( ) ( ) ( )TB
B B T B T
MF z g I g V z g I
ξξ ξ ξ ξ ξ ξρ ρ ρ
ξ=
∂= − ⋅ − ⋅ − ⋅ ⋅ − ⋅
∂
3,43,4 3,4 3,4
4
( )( ) ( ) ( ),TG
G G G
MF z mg z
ξξ ξ ξ
ξ=
∂= − ⋅ ⋅
∂
, 3,43,4 3, 44 ,
43
( )( ) ( ) ( )T Ext
Ext TExt
MF gz i
ξξ ξξ ρ
ξ+
∂= − ⋅ ⋅
∂
65/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
ξ3 : immersionξ4 : heel
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (5)
( )* (0,0) (0,0) (0,0) (0)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
0 step, Immersion
(0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + + : Total force1
(0,0)3,4
(0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4
( )
( ) ( ) ( ) ( )Extv
F g dv g l b Tξ
ξ ξ ξ ξρ ρ ⋅ ⋅= − = − ⋅∫∫∫
y
z
LC40 m
30 m
9m=
Section view
,O O′Baseline
G
v
, z′
, y′g B
Plan view
x
y
LC(0,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(0,0)3,4
(0,0)3,4
( )
( )BV
F g dVξ
ξ ρ= ⋅ ∫∫∫
(0,0) 53,4( ) 3.6 10 [ ]GF kNξ = − ×
5 5 43.6 10 [ ] 3.6 10 [ ] 3.6 10 [ ]kN kN kN= − × + × − ×43.6 10 [ ]kN= − ×
(0,0)3,4( ) 100L mξ =
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(0,0) (0,0) (0,0)3,4 3,4 3,4( ) ( ) ( )sg L B Tξ ξ ξρ= ⋅ ⋅ ⋅
10[ ] 100[ ] 40[ ] 9[ ]m m m m= ⋅ ⋅ ⋅53.6 10 [ ]kN= ×
1
(1,0)3,4( )T ξ
g
(0,0)3,4( )
20l
mξ
=
(0,0)3,4( )
40sB
mξ
=
(0,0)3,4( )G G ξ=(0,0)3,4( )B B ξ=(0,0)3,4( )g g ξ=
310 [kN/m ] 20[ ] 20[ ] 9[ ]m m m= − × × ×43.6 10 [kN]= − ×
(0,0) (0,0) (0,0) (0,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
66/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
(0,0) (0,0)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ+− ⋅ ⋅
ξ3 : immersionξ4 : heel
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (6)
( )* (0,0) (0,0) (0,0) (0)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
2
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
0 step, Immersion
y
z
LC40 m
30 m
9m=
Section view
,O O′Baseline
G
v
, z′
, y′g B
Plan view
x
y
LC(0,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(0,0)3,4( ) 100L mξ =
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(0,0)3,4( )T ξ
g
(0,0)3,4( )
40sB
mξ
=(0,0)3,4( )
20l
mξ
=
2
(0,0)3,4( )WPg A ξρ− ⋅
(0,0)3,4( )WPA
g dx dyξ
ρ= − ⋅ ∫∫
(0,0) (0,0)3,4 3,4( ) ( )sg B Lξ ξρ= − ⋅ ⋅
310[ / ] 40[ ] 100[ ]kN m m m= − ⋅ ⋅
44.0 10 [ / ]kN m= − ×
(0,0)3,4( )WPg a ξρ ⋅
(0,0)3,4( )WPa
g dx dyξ
ρ= ⋅ ∫∫
(0,0) (0,0)3,4 3,4( ) ( )g b lξ ξρ= ⋅ ⋅
310[ / ] 20[ ] 20[ ]kN m m m= ⋅ ⋅
34.0 10 [ / ]kN m= ×
(0,0)3,4( )G G ξ=(0,0)3,4( )B B ξ=(0,0)3,4( )g g ξ=
(0,0) (0,0)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ+− ⋅ ⋅
4 34.0 10 [ / ] 4.0 10 [ / ]kN m kN m= − × + ×43.6 10 [ / ]kN m= − ×
67/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
GF
ξ3 : immersionξ4 : heel
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (7)
( )* (0,0) (0,0) (0,0) (0)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
3
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
0 step, Immersion
y
z
LC40 m
30 m
9m=
Section view
,O O′Baseline
G
v
, z′
, y′g B
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(0,0)3,4( )T ξ
1 2
(0,0) 43,4( ) 3.6 10 [kN]zF ξ = − ×1
2
(0)3ξ∆ : change of immersion3
* (0,0)3,4 3,4(0)
3 (0,0) (0,0)3,4 3,4
( ) ( )
( ) ( )z z
WP WP
F Fg A g a
ξ ξ
ξ ξξ
ρ ρ−
∆ =− ⋅ + ⋅
4
4
0[ ] ( 3.6 10 )[ ] 13.6 10 [ / ]
kN kN mkN m
− − ×= = −
− ×
If we assume that Fz(ξ3*,ξ4
*) =0
( ) ( ) ( )1 0 03 3 3 0 1 1 [ ]mξ ξ ξ= + ∆ = − = −We want to find *
3ξ
Static equilibrium? Check!( )1*
3 3ξ ξ=? (1,0)
3,4( ) 0zF ξ =?
y
z
LC
Section view
,O O′
, z′
y′Baselinew g(0,0)
3,4( )T ξ10 m=
G
B
(0,0) (0,0)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ+− ⋅ ⋅ 43.6 10 [ / ]kN m= − ×
(0,0)3,4( )G G ξ=(0,0)3,4( )B B ξ=(0,0)3,4( )g g ξ=
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
68/120
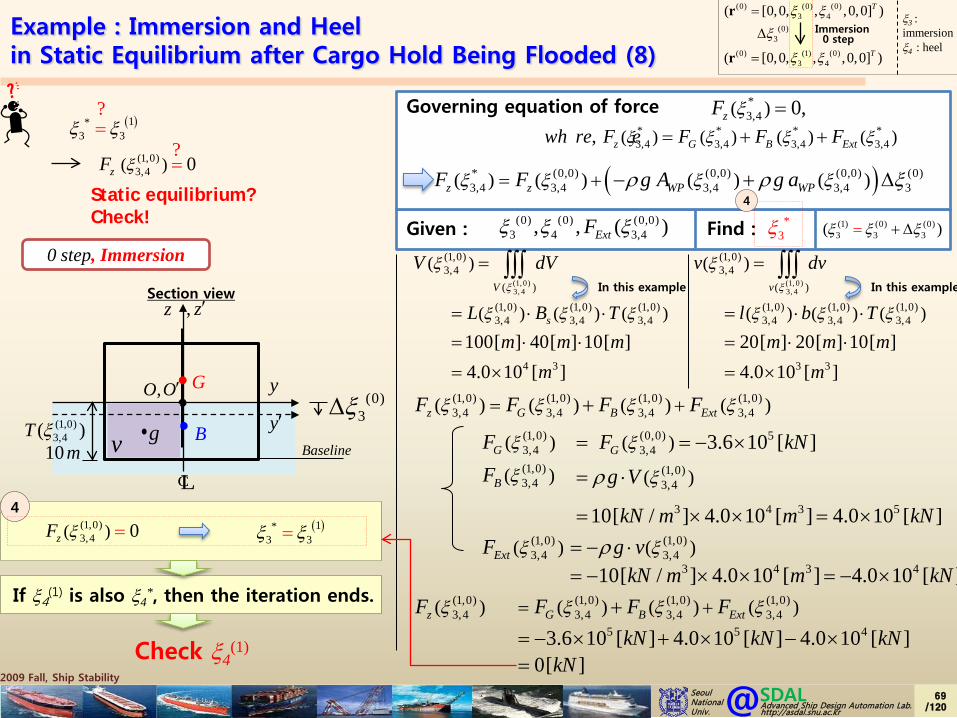
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
ξ3 : immersionξ4 : heel
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (8)
( )* (0,0) (0,0) (0,0) (0)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(0) (0) (0,0)3 4 3,4, , ( )ExtFξ ξ ξ *
3ξ
*3,4( ) 0,zF ξ =
4
(1) (0) (0)3 3 3( )ξ ξ ξ+ ∆=
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
(1,0)3,4( )BF ξ
(1,0)3,4( )GF ξ
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= ++
(1,0)3,4( )ExtF ξ (1,0)
3,4( )g v ξρ= − ⋅
(0,0) 53,4( ) 3.6 10 [ ]GF kNξ= = − ×
(1,0)3,4( )g V ξρ= ⋅
3 4 3 510[ / ] 4.0 10 [ ] 4.0 10 [ ]kN m m kN= × × = ×
(1, 0)3, 4
(1,0)3,4
( )
( )V
V dVξ
ξ = ∫∫∫
(1,0)3,4( )zF ξ (1,0) (1,0) (1,0)
3,4 3,4 3,4( ) ( ) ( )G B ExtF F Fξ ξ ξ= ++5 5 43.6 10 [ ] 4.0 10 [ ] 4.0 10 [ ]kN kN kN= − × + × − ×
0[ ]kN=
100[ ] 40[ ] 10[ ]m m m= ⋅ ⋅
(1,0) (1,0) (1,0)3,4 3,4 3,4( ) ( ) ( )sL B Tξ ξ ξ= ⋅ ⋅
In this example
3 4 3 410[ / ] 4.0 10 [ ] 4.0 10 [ ]kN m m kN= − × × = − ×
0 step, Immersion
(1,0)3,4( ) 0zF ξ =
Static equilibrium?Check!
( )1*3 3ξ ξ=
4(1,0)3,4( ) 0zF ξ = ( )1*
3 3ξ ξ=
If ξ4(1) is also ξ4
*, then the iteration ends.
Check ξ4(1)
?
?
y
z
LC
Section view
,O O′
, z′
y′(1,0)3,4( )T ξ
10m
G
B
(0)3ξ∆
4 34.0 10 [ ]m= ×
(1, 0)3, 4
(1,0)3,4
( )
( )v
v dvξ
ξ = ∫∫∫
20[ ] 20[ ] 10[ ]m m m= ⋅ ⋅
(1,0) (1,0) (1,0)3,4 3,4 3,4( ) ( ) ( )l b Tξ ξ ξ= ⋅ ⋅
In this example
3 34.0 10 [ ]m= ×
Baselinev g
69/120
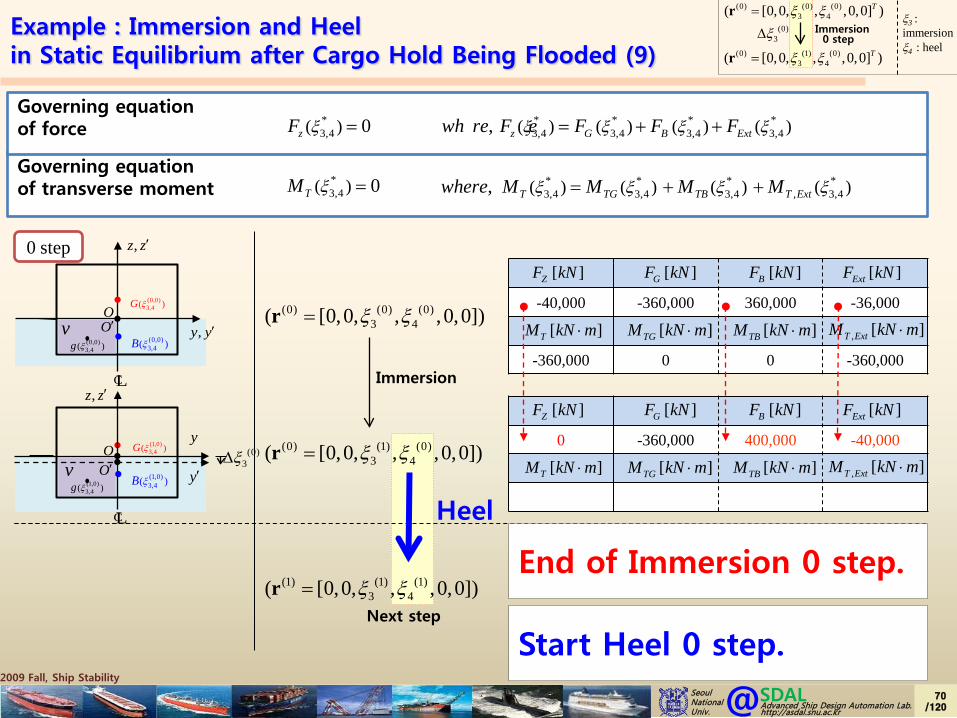
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (9)
0 step
(0) (0) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
LC
O′
(0,0)3,4( )G ξ
v
,z z′
,y y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ
O -40,000 -360,000 360,000 -36,000
-360,000 0 0 -360,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
0 -360,000 400,000 -40,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=rNext step
End of Immersion 0 step.
Start Heel 0 step.
(1,0)3,4( )G ξ
v(1,0)3,4( )g ξ
y
,z z′
LC
O
y′(1,0)3,4( )B ξ
(0)3ξ∆
O′
(0) (0) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 0 step
ξ3 : immersionξ4 : heel
70/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (10)
y
z
LC
,O O′
(0,0)3,4( )G ξ
v
, z′
, y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ9[ ]m=
(0,0)3,4( )T ξ
y
,z z′
LC
O (0)3ξ∆
y′v(1,0)3,4( )g ξ
O′10m=
(1,0)3,4( )T ξ
(0,0)3,4(0,0)3,4(0,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(0,0)3,4( ) (0,0,6)G ξ =(0,0)3,4( ) (0, 10, 4.5)g ξ = − −
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(0)3
00
ξ
+ ∆
(0,0)3,4(0,0)3,4(0,0) (0)3,4 3
( )( )( )
00
G
G
G
xyz
ξ
ξ
ξ ξ
= + ∆
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
G
G
G
xyz
ξ
ξ
ξ
(1) (0) (0)3 3 3ξ ξ ξ= + ∆
0 00 06 1
= + −
005
=
(0,0)3,4( ) (0,0, 4.5)B ξ = −
(1,0)3,4( )B ξ
(1,0)3,4( )G ξ
immersion
For center of gravity of ship (1,0)3,4( )G ξ
next
0 step, Heel to calculate (1,0)3,4( )TM ξCalculate (1,0) (1,0) (1,0)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
ξ3 : immersionξ4 : heel
71/120
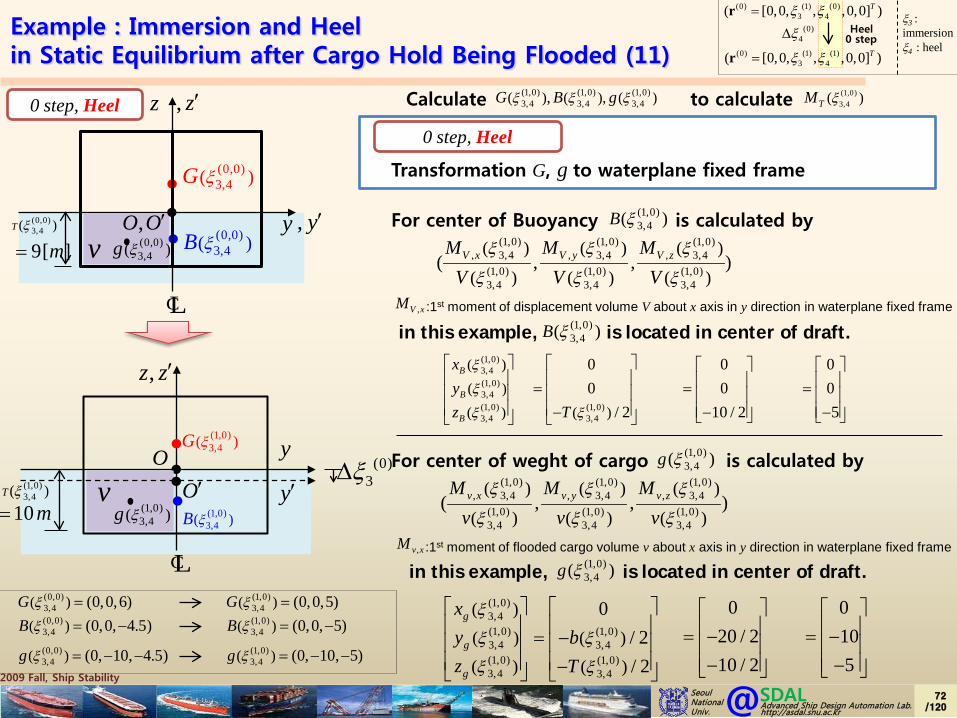
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (11)
y
z
LC
,O O′
(0,0)3,4( )G ξ
v
, z′
, y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ9[ ]m=
(0,0)3,4( )T ξ
y
,z z′
LC
O (0)3ξ∆
y′v(1,0)3,4( )g ξ
O′10m=
(1,0)3,4( )T ξ
Transformation G, g to waterplane fixed frame
(0,0)3,4( ) (0,0,6)G ξ =
(0,0)3,4( ) (0, 10, 4.5)g ξ = − −
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5)g ξ = − −
0 step, Heel
(1,0)3,4(1,0)3,4
( )( )
0/ 2/ 2
bT
ξ
ξ
= − −
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
g
g
g
xyz
ξ
ξ
ξ
020 / 210 / 2
= − −
0105
= − −
(1,0)3,4( )
00
/ 2T ξ
= −
(1,0)3,4(1,0)3,4(1,0)3,4
( )( )( )
B
B
B
xyz
ξ
ξ
ξ
00
10 / 2
= −
005
= −
(0,0)3,4( ) (0,0, 4.5)B ξ = − (1,0)
3,4( ) (0,0, 5)B ξ = −
(1,0)3,4( )B ξ
(1,0)3,4( )G ξ
For center of Buoyancy is calculated by(1,0)3,4( )B ξ
in this example, is located in center of draft.(1,0)3,4( )B ξ
in this example, is located in center of draft.(1,0)3,4( )g ξ
(1,0) (1,0) (1,0), 3,4 , 3,4 , 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )V x V y V zM M M
V V Vξ ξ ξ
ξ ξ ξ
,V xM :1st moment of displacement volume V about x axis in y direction in waterplane fixed frame
For center of weght of cargo is calculated by(1,0)3,4( )g ξ
(1,0) (1,0) (1,0), 3,4 , 3,4 , 3,4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( ) ( ) ( )
( ) ( ) ( )( , , )v x v y v zM M M
v v vξ ξ ξ
ξ ξ ξ
,v xM :1st moment of flooded cargo volume v about x axis in y direction in waterplane fixed frame
to calculate (1,0)3,4( )TM ξCalculate (1,0) (1,0) (1,0)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ0 step, Heel
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
ξ3 : immersionξ4 : heel
72/120
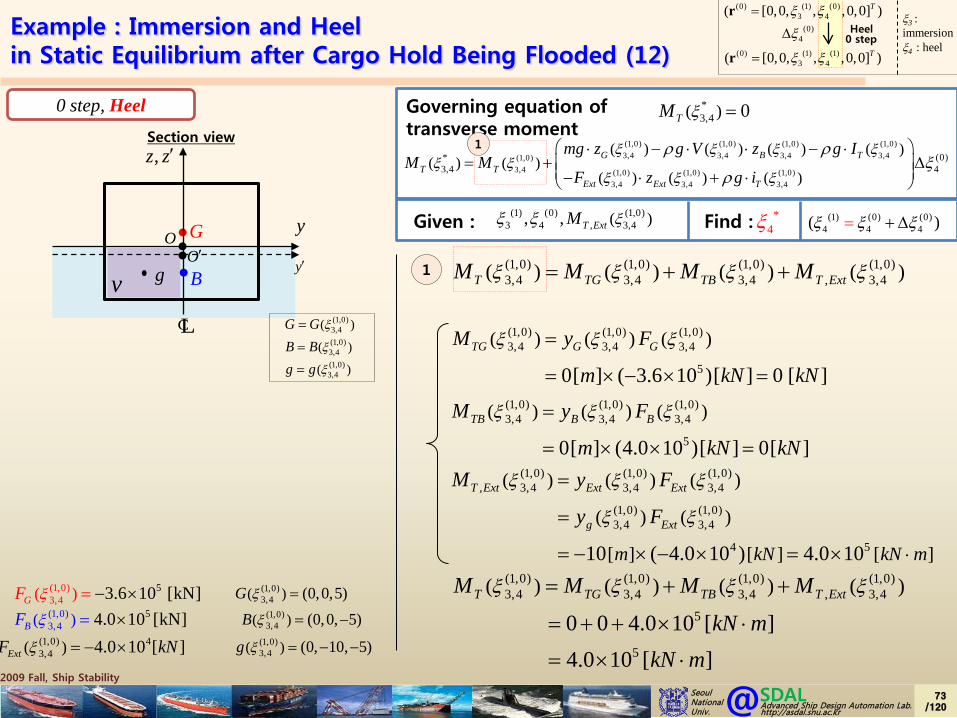
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (12)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
1
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( )T TG TB T ExtM M M Mξ ξ ξ ξ= + +1
(1,0) (1,0) (1,0)3,4 3,4 3,4
5
( ) ( ) ( )
0[ ] ( 3.6 10 )[ ] 0 [ ]TG G GM y F
m kN kN
ξ ξ ξ=
= × − × =(1,0) (1,0) (1,0)3,4 3,4 3,4
5
( ) ( ) ( )
0[ ] (4.0 10 )[ ] 0[ ]TB B BM y F
m kN kN
ξ ξ ξ=
= × × =(1,0) (1,0) (1,0)
, 3,4 3,4 3,4
(1,0) (1,0)3,4 3,4
4 5
( ) ( ) ( )
( ) ( )
[ ] [ ] [ ]10 ( 4.0 10 ) 4.0 10
T Ext Ext Ext
g Ext
m kN kN m
M y F
y F
ξ ξ ξ
ξ ξ
⋅
=
=
= − × − × = ×
(1,0)3,4
5( ) 4.0 10 [kN]BF ξ = ×(1,0) 43,4( ) 4.0 10 [ ]ExtF kNξ = − ×
(1,0) 53,4( ) 3.6 10 [kN]GF ξ = − ×
5
5
0 0 4.0 10 [ ]4.0 10 [ ]
kN mkN m
= + + × ⋅
= × ⋅
0 step, Heel
G
v g
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5)g ξ = − −
(1,0)3,4( ) (0,0, 5)B ξ = −
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( )T TG TB T ExtM M M Mξ ξ ξ ξ= + +
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
73/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (13)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
2
0 step, Heel
G
v g(1,0)3,4( )
10T
mξ
=
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(1,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(1,0)3,4( ) 100L mξ =
g(1,0)3,4( )
40sB
mξ
=
(1,0)3,4( )
20l
mξ
=m: Mass of the shipzG: Z coordinate of the center of mass of the ship
IT : 2nd moment of waterplane area of ship with respect to x axis of the waterplane fixed frame
V: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
iT : 2nd moment of waterplane area of flooded volume with respect to x axis of the waterplane fixed frame
(1,0)3,4
5( ) 4.0 10 [kN]BF ξ = ×(1,0)3,4
4( ) 4.0 10 [kN]ExtF ξ = − ×
(1,0)3,4
5( ) 3.6 10 [kN]GF ξ = − ×
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5)g ξ = − −
(1,0)3,4( ) (0,0, 5)B ξ = −
(1, 0)3, 4
(1,0) (1,0) 33,4 3,4(1,0) 2
3,4( )
( ) ( )( )
12WP
sT
A
L BgI g y dx dy g
ξ
ξ ξξρ ρ ρ= =∫∫
(1, 0)3, 4
(1,0) (1,0) (1,0)3,4 3,4 3,4
( )
( ) ( ) ( )B BV
gV z g dV zξ
ξ ξ ξρ ρ⋅ = ⋅ ⋅∫∫∫(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )s Bg L B T zξ ξ ξ ξρ= ⋅ ⋅ ⋅ ⋅
310[ / ] 100[ ] 40[ ] 10[ ] ( 5[ ])kN m m m m m= × × × × −62.0 10 [ ]kN m= − × ⋅
(1,0) 53,4( ) 3.6 10 [ ] 5[ ]Gmg z kN mξ⋅ = × ×
61.8 10 [ ]kN m= × ⋅
33 6100[ ] 40[ ]10[ / ] 5.333 10 [ ]
12[ ]m mkN m kN m
m×
= × = × ⋅
74/120
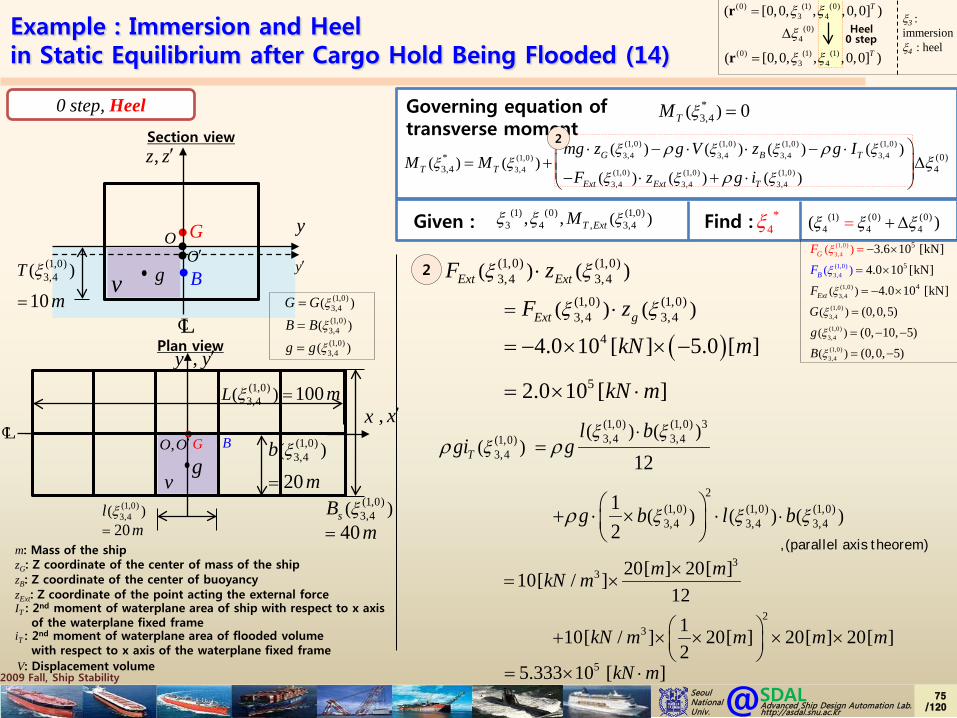
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (14)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
2
0 step, Heel
G
v g(1,0)3,4( )
10T
mξ
=
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(1,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(1,0)3,4( ) 100L mξ =
g(1,0)3,4( )
40sB
mξ
=
(1,0)3,4( )
20l
mξ
=m: Mass of the shipzG: Z coordinate of the center of mass of the ship
IT : 2nd moment of waterplane area of ship with respect to x axis of the waterplane fixed frame
V: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
iT : 2nd moment of waterplane area of flooded volume with respect to x axis of the waterplane fixed frame
(1,0) (1,0)3,4 3,4( ) ( )Ext ExtF zξ ξ⋅
(1,0) (1,0)3,4 3,4( ) ( )Ext gF zξ ξ= ⋅
( )44.0 10 [ ] 5.0 [ ]kN m= − × × −
52.0 10 [ ]kN m= × ⋅(1,0) (1,0) 33,4 3,4(1,0)
3,4
( ) ( )( )
12T
l bgi g
ξ ξξρ ρ
⋅=
,(parallel axis theorem)3
3 20[ ] 20[ ]10[ / ]12
m mkN m ×= ×
2(1,0) (1,0) (1,0)3,4 3,4 3,4( ) ( ) ( )
12
g b l bξ ξ ξρ ⋅ + ⋅ × ⋅
55.333 10 [ ]kN m= × ⋅
23 110[ / ] 20[ ] 20[ ] 20[ ]
2kN m m m m + × × × ×
(1,0)3,4
5( ) 4.0 10 [kN]BF ξ = ×(1,0)3,4
4( ) 4.0 10 [kN]ExtF ξ = − ×
(1,0)3,4
5( ) 3.6 10 [kN]GF ξ = − ×
(1,0)3,4( ) (0,0,5)G ξ =(1,0)3,4( ) (0, 10, 5)g ξ = − −(1,0)3,4( ) (0,0, 5)B ξ = −
75/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (15)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
2
0 step, Heel
G
v g(1,0)3,4( )
10T
mξ
=
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(1,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(1,0)3,4( ) 100L mξ =
g(1,0)3,4( )
40sB
mξ
=
(1,0)3,4( )
20l
mξ
=m: Mass of the shipzG: Z coordinate of the center of mass of the ship
IT : 2nd moment of waterplane area of ship with respect to x axis of the waterplane fixed frame
V: Displacement volume
zB: Z coordinate of the center of buoyancyzExt: Z coordinate of the point acting the external force
iT : 2nd moment of waterplane area of flooded volume with respect to x axis of the waterplane fixed frame
(1,0)3,4
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4
(1,0) (1,0)3,4 3,4
( ) ( ) ( ) ( )
( ) ( ) ( )
G B T
Ext Ext T
mg z gV z g I
F z g i
ξ ξ ξ ξ
ξ ξ ξ
ρ ρ
ρ
⋅ − ⋅ − ⋅
− ⋅ + ⋅
6 6 6
5 5
1.8 10 [ ] 2.0 10 [ ] 5.333 10 [ ]2.0 10 [ ] 5.333 10 [ ]
kN m kN m kN mkN m kN m
= × ⋅ + × ⋅ − × ⋅
− × ⋅ + × ⋅
61.2 10 [ ]kN m= − × ⋅
(1,0)3,4
5( ) 4.0 10 [kN]BF ξ = ×(1,0)3,4
4( ) 4.0 10 [kN]ExtF ξ = − ×
(1,0)3,4
5( ) 3.6 10 [kN]GF ξ = − ×
(1,0)3,4( ) (0,0,5)G ξ =(1,0)3,4( ) (0, 10, 5)g ξ = − −(1,0)3,4( ) (0,0, 5)B ξ = −
76/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (16)
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
2
0 step, Heel
G
v g(1,0)3,4( )
10T
mξ
=
y
,z z′
LC
Section view
O
y′B
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
O′
ξ3 : immersionξ4 : heel
Plan view (1,0)3,4
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4
(1,0) (1,0)3,4 3,4
( ) ( ) ( ) ( )
( ) ( ) ( )
G B T
Ext Ext T
mg z gV z g I
F z g i
ξ ξ ξ ξ
ξ ξ ξ
ρ ρ
ρ
⋅ − ⋅ − ⋅
− ⋅ + ⋅
1 3
1 (1,0) 53,4( ) 4.0 10 [ ]TM kN mξ = × ⋅
* (1, 0)
3,4 3, 4
(1,0)3,4
(0)4 (1,0) (1,0) (1,0) (1,0)
3,4 3,4 3,4 3,4
(1,0) (1,0)3,4 3,4
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
T T
G B T
Ext Ext T
M M
mg z gV z g I
F z g i
ξ ξ
ξ ξ ξ ξ
ξ ξ ξ
ξρ ρ
ρ
−=
∆ ⋅ − ⋅ − ⋅ − ⋅ + ⋅
3
5
6
0[ ] 4.0 10 [ ] 0.33rad 19.11.2 10 [ ]
kN m kN mkN m
⋅ − × ⋅= = =
− × ⋅
If we assume that MT(ξ3,4*) =0
(1) (0) (0)4 4 4 0 19.1 19.1ξ ξ ξ= + ∆ = + ° = °
61.2 10 [ ]kN m= − × ⋅
Static equilibrium? Check!
We want to find *4ξ
( )1*4 4ξ ξ=
? (1,1)3,4( ) 0TM ξ =
?
y
z
LC
G y′
g B
(0)4ξ∆
v
O
z′
O′
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
77/120
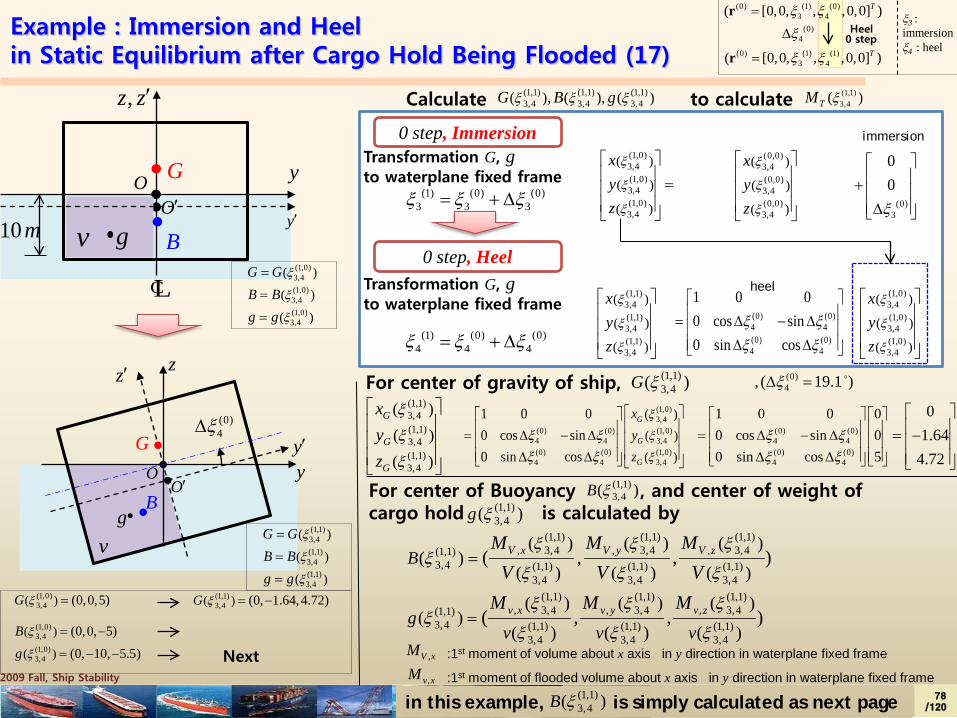
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (17)
y
,z z′
LC
OO′
y′v g10m
immersion(0,0)3,4(0,0)3,4(0,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(1,0)3,4( ) (0,0,5)G ξ =
(1,0)3,4( ) (0, 10, 5.5)g ξ = − −
0 step, Immersion(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(0)3
00
ξ
+ ∆
(1,0)3,4
(0) (0) (1,0)4 4 3,4(0) (0) (1,0)4 4 3,4
( )( )( )
1 0 00 cos sin0 sin cos
G
G
G
xyz
ξ
ξ
ξ
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4(1,1)3,4(1,1)3,4
( )( )( )
G
G
G
xyz
ξ
ξ
ξ
(1) (0) (0)3 3 3ξ ξ ξ= + ∆
01.64
4.72
= −
B
G
(1,0)3,4( ) (0,0, 5)B ξ = −
0 step, Heel
(0) (0)4 4(0) (0)4 4
1 0 00 cos sin0 sin cos
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4(1,1)3,4(1,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(1,0)3,4(1,0)3,4(1,0)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(1) (0) (0)4 4 4ξ ξ ξ= + ∆
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
heel
(0) (0)4 4(0) (0)4 4
1 0 0 00 cos sin 00 sin cos 5
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(1,1)3,4( ) (0, 1.64,4.72)G ξ = −
(0)4, ( 19.1 )ξ∆ =
Next
y
z
G
z′
y′
gB
(0)4ξ∆
v
O
(1,0)3,4( )G G ξ=(1,0)3,4( )B B ξ=(1,0)3,4( )g g ξ=
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
Transformation G, gto waterplane fixed frame
O′
For center of gravity of ship, (1,1)3,4( )G ξ
ξ3 : immersionξ4 : heel
(1,1) (1,1) (1,1), 3,4 , 3,4 , 3,4(1,1)
3,4 (1,1) (1,1) (1,1)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )V x V y V zBM M M
V V Vξ ξ ξ
ξξ ξ ξ
=
,V xM :1st moment of volume about x axis in y direction in waterplane fixed frame
in this example, is simply calculated as next page(1,1)3,4( )B ξ
For center of Buoyancy , and center of weight of cargo hold is calculated by
(1,1)3,4( )B ξ
(1,1)3,4( )g ξ
(1,1) (1,1) (1,1), 3,4 , 3,4 , 3,4(1,1)
3,4 (1,1) (1,1) (1,1)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )v x v y v zg
v v v
M M Mξ ξ ξξ
ξ ξ ξ=
,v xM :1st moment of flooded volume about x axis in y direction in waterplane fixed frame
to calculate (1,1)3,4( )TM ξCalculate (1,1) (1,1) (1,1)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
78/120
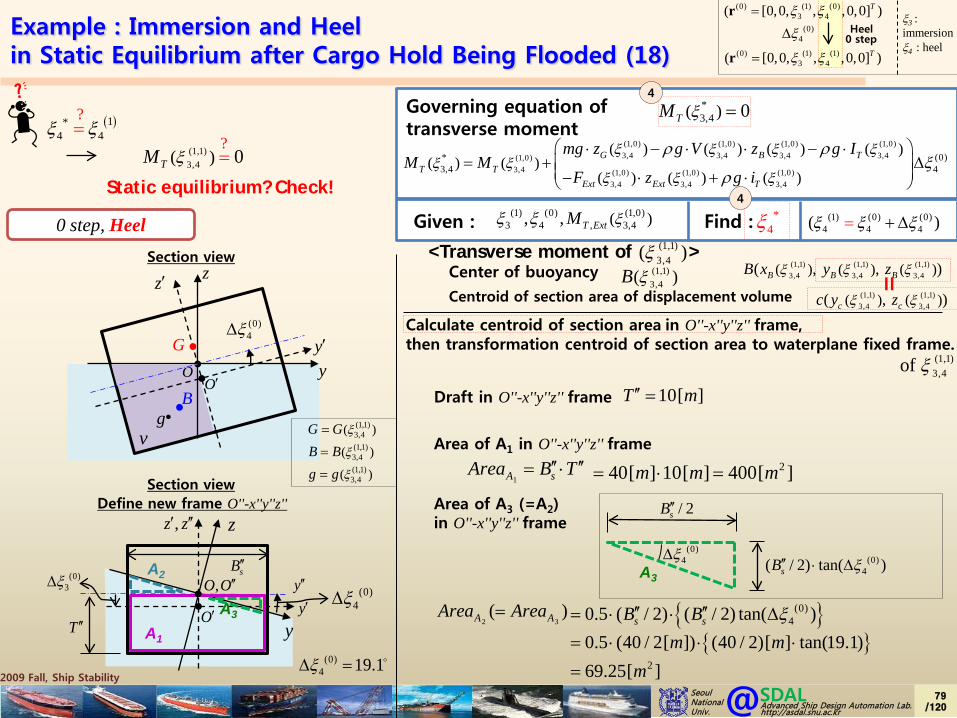
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (18)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
y
z,z z′ ′′
y′
(0)4 19.1ξ∆ =
(0)4ξ∆
A2
A3
A1
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=
Area of A1 in O''-x''y''z'' frame
1A sArea B T′′ ′′= ⋅ 240[ ] 10[ ] 400[ ]m m m= ⋅ =
10[ ]T m′′ =Draft in O''-x''y''z'' frame
(0)3ξ∆
T ′′
sB′′
2 3( )A AArea Area=
{ }0.5 (40 / 2[ ]) (40 / 2)[ ] tan(19.1)m m= ⋅ ⋅ ⋅269.25[ ]m=
Area of A3 (=A2)in O''-x''y''z'' frame
A3
/ 2sB′′
(0)4( / 2) tan( )sB ξ′′ ⋅ ∆
(0)4ξ∆
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B ξ
{ }(0)40.5 ( / 2) ( / 2) tan( )s sB B ξ′′ ′′= ⋅ ⋅ ∆
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
Define new frame O''-x''y''z''Section view
y′′
<Transverse moment of >(1,1)3,4( )ξ
,O O′′
O′
(1,1)3,4of ξ
Center of buoyancy
79/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (19)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
y
z,z z′ ′′
y′
(0)4 19.1ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
sB′′
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(1,1)3,4of ξ
3 3( , )A Ay z′′ ′′ (1)
42 1, tan( )
2 3 2 3s sB B ξ′′ ′′ = ⋅ − ∆ ⋅
( )(40 / 2) (2 / 3), (40 / 2) tan(19.1) (1/ 3)= ⋅ − ⋅ ⋅
Centroid of A3 in O''-x''y''z'' frame,
Centroid of A1 in O''-x''y''z'' frame,
1 1( , )A Ay z′′ ′′
( )13.33, 2.31= −Centroid of A2 in O''-x''y''z'' frame,
2 2( , )A Ay z′′ ′′in similar way ( )13.33,2.31= −
A3
/ 2sB′′
(0)4
( / 2)
tan( )sB
ξ
′′
⋅ ∆
(0)4ξ∆
3Ay′′ 3Az′′
10(0, ) (0, ) (0, 5)2 2
T ′′= − = − = −
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
Center of buoyancy
80/120
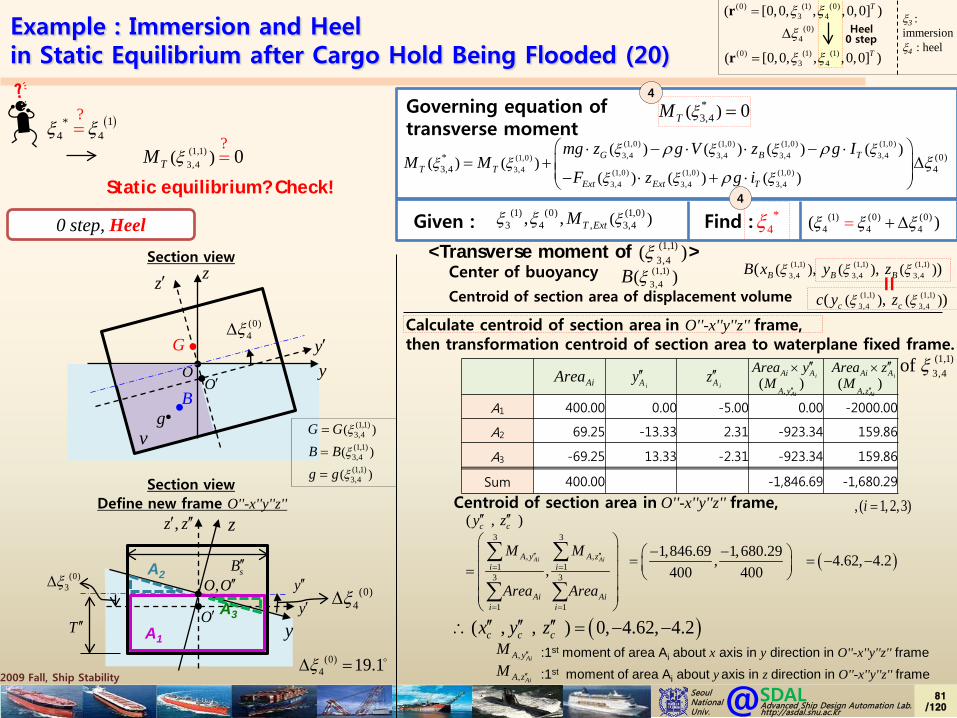
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (20)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
y
z,z z′ ′′
y′
(0)4 19.1ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
sB′′
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to waterplane fixed frame.
ξ3 : immersionξ4 : heel
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
A1 400.00 0.00 -5.00 0.00 -2000.00
A2 69.25 -13.33 2.31 -923.34 159.86
A3 -69.25 13.33 -2.31 -923.34 159.86
Sum 400.00 -1,846.69 -1,680.29
3 3
, ,1 1
3 3
1 1
( , )
,Ai Ai
c c
A y A zi i
Ai Aii i
y z
M M
Area Area
′′ ′′= =
= =
′′ ′′ =
∑ ∑
∑ ∑
, AiA yM ′′ :1st moment of area Ai about x axis in y direction in O''-x''y''z'' frame
, AiA zM ′′ :1st moment of area Ai about y axis in z direction in O''-x''y''z'' frame
( )( , , ) 0, 4.62, 4.2c c cx y z′′ ′′ ′′∴ = − −
iAy′′
, ( 1, 2,3)i =
,( )
AiA yM
′′
iAi AArea y′′×,
( )AiA z
M′′
iAi AArea z′′×
1,846.69 1,680.29,400 400
− − =
AiArea
Centroid of section area in O''-x''y''z'' frame,
( )4.62, 4.2= − −
(1,1)3,4of ξ
iAz′′
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
Center of buoyancy
81/120
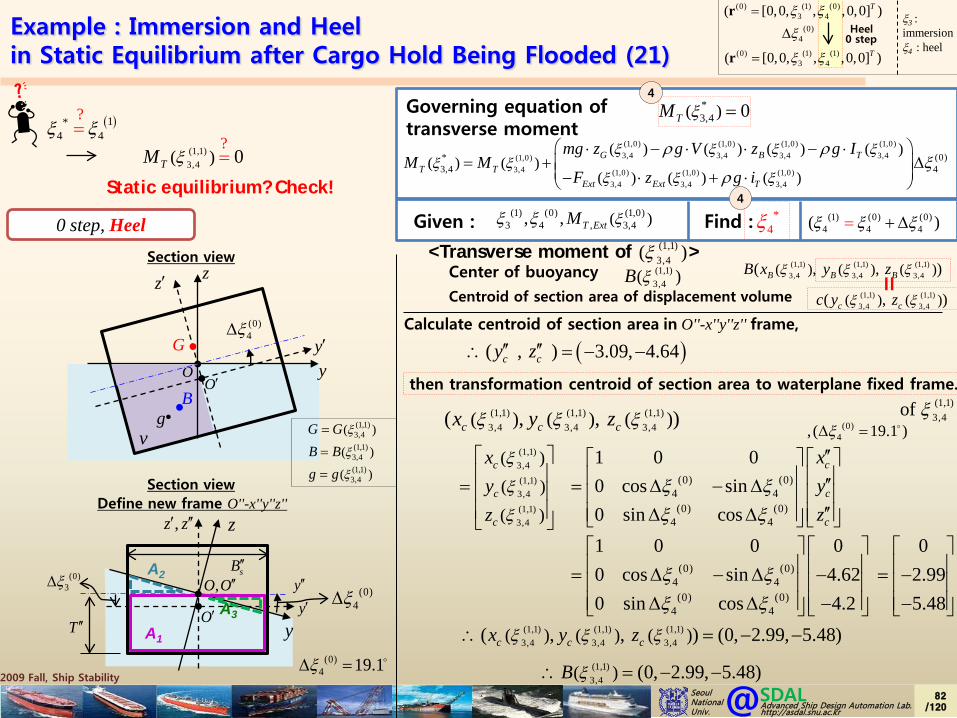
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (21)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
( )( , ) 3.09, 4.64c cy z′′ ′′∴ = − −
(1,1)3,4(1,1)3,4(1,1)3,4
( )( )( )
c
c
c
xyz
ξ
ξ
ξ
=
(1,1)3,4( ) (0, 2.99, 5.48)B ξ∴ = − −
(0) (0)4 4(0) (0)
4 4
1 0 0 00 cos sin 4.620 sin cos 4.2
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
(0)4, ( 19.1 )ξ∆ =
Calculate centroid of section area in O''-x''y''z'' frame,
then transformation centroid of section area to waterplane fixed frame.
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )c c cx y zξ ξ ξ
02.995.48
= − −
(0) (0)4 4(0) (0)
4 4
1 0 00 cos sin0 sin cos
c
c
c
xyz
ξ ξξ ξ
′′ ′′= ∆ − ∆
′′ ∆ ∆
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 2.99, 5.48)c c cx y zξ ξ ξ∴ = − −
(1,1)3,4of ξ
y
z,z z′ ′′
y′
(0)4 19.1ξ∆ =
(0)4ξ∆
A2
A3
A1
(0)3ξ∆
T ′′
sB′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(1,1) (1,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(1,1)3,4( )B ξ
<Transverse moment of >(1,1)3,4( )ξ
Center of buoyancy
82/120
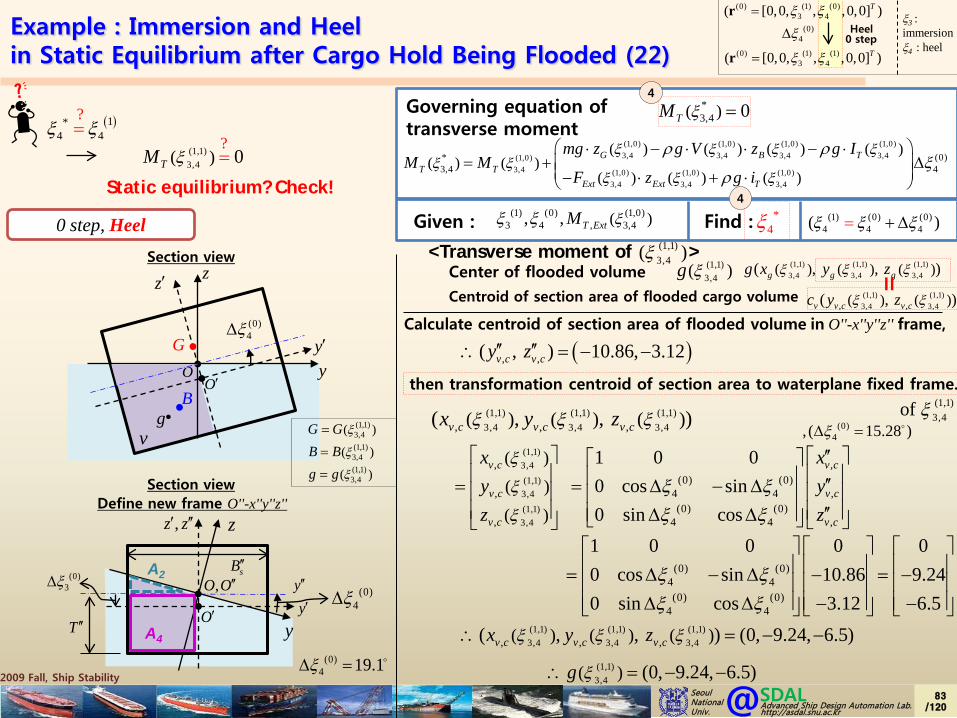
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (22)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
( ), ,( , ) 10.86, 3.12v c v cy z′′ ′′∴ = − −
(1,1)3,4(1,1)3,4(1,1)3,4
,
,
,
( )( )( )
v c
v c
v c
xyz
ξ
ξ
ξ
=
(1,1)3,4( ) (0, 9.24, 6.5)g ξ∴ = − −
(0) (0)4 4(0) (0)
4 4
1 0 0 00 cos sin 10.860 sin cos 3.12
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
(0)4, ( 15.28 )ξ∆ =
Calculate centroid of section area of flooded volume in O''-x''y''z'' frame,
then transformation centroid of section area to waterplane fixed frame.
(1,1) (1,1) (1,1)3,4 3,4 3,4, , ,( ) ( ) ( )( , , )v c v c v cx y zξ ξ ξ
09.246.5
= − −
,(0) (0)
4 4 ,(0) (0)
4 4 ,
1 0 00 cos sin0 sin cos
v c
v c
v c
xyz
ξ ξξ ξ
′′ ′′= ∆ − ∆ ′′ ∆ ∆
(1,1) (1,1) (1,1)3,4 3,4 3,4, , ,( ) ( ) ( )( , , ) (0, 9.24, 6.5)v c v c v cx y zξ ξ ξ∴ = − −
(1,1)3,4of ξ
y
z,z z′ ′′
y′
(0)4 19.1ξ∆ =
(0)4ξ∆
A2
A4
(0)3ξ∆
T ′′
sB′′
Define new frame O''-x''y''z''Section view
y′′,O O′′
O′
(1,1) (1,1) (1,1)3,4 3,4 3,4( ) ( ) ( )( , , )g g gg x y zξ ξ ξ
(1,1) (1,1)3,4 3,4, ,( ) ( )( , )v v c v cc y zξ ξCentroid of section area of flooded cargo volume
=(1,1)3,4( )g ξ
<Transverse moment of >(1,1)3,4( )ξ
Center of flooded volume
83/120
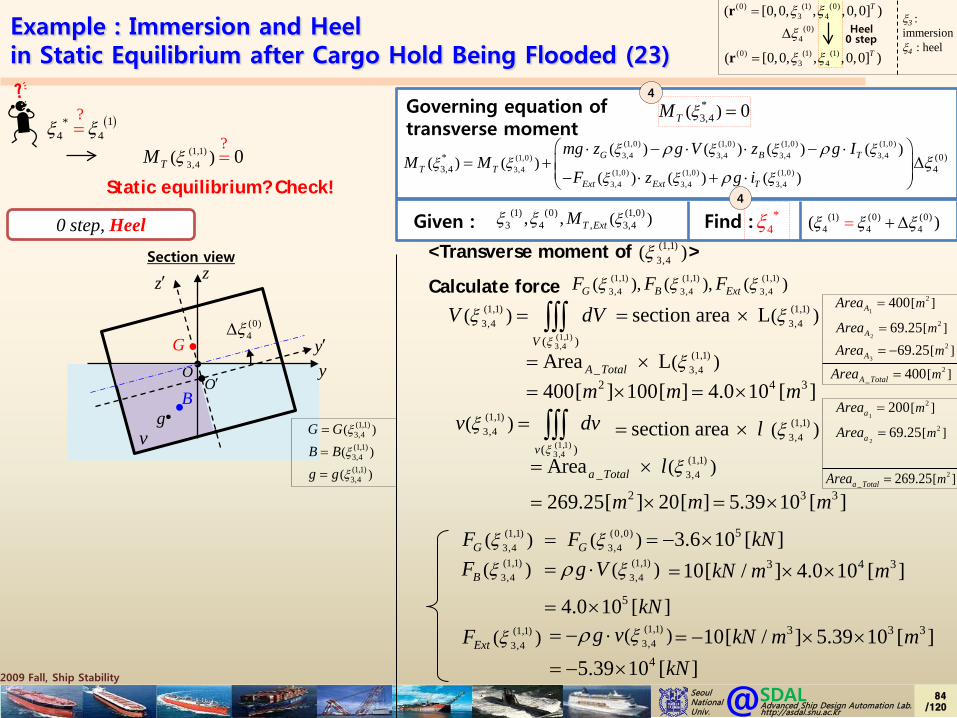
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (23)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
<Transverse moment of >(1,1)3,4( )ξ
(1,1)3,4( )BF ξ
(1,1)3,4( )GF ξ
(1,1)3,4( )ExtF ξ
45.39 10 [ ]kN= − ×
(0,0)3,4
5( ) 3.6 10 [ ]GF kNξ= = − ×3 4 310[ / ] 4.0 10 [ ]kN m m= × ×(1,1)
3,4( )g V ξρ= ⋅54.0 10 [ ]kN= ×
(1,1)3,4
(1,1)3,4
( )
( )V
V dVξ
ξ = ∫∫∫ (1,1)3,4( )section area L ξ= × 1
2[ ]400A mArea =
2
2[ ]69.25A mArea =
3
2[ ]69.25A mArea = −2
_ [ ]400A Total mArea =2 4 3400[ ] 100[ ] 4.0 10 [ ]m m m= × = ×
(1,1)3,4_ ( )Area LA Total ξ= ×
Calculate force (1,1) (1,1) (1,1)3,4 3,4 3,4( ), ( ), ( )G B ExtF F Fξ ξ ξ
(1,1)3,4
(1,1)3,4
( )
( )v
v dvξ
ξ = ∫∫∫ (1,1)3,4( )section area l ξ= ×
(1,1)3,4_ ( )Area a Total l ξ= ×
2 3 3269.25[ ] 20[ ] 5.39 10 [ ]m m m= × = ×
3 3 310[ / ] 5.39 10 [ ]kN m m= − × ×(1,1)3,4( )g v ξρ= − ⋅
1
2[ ]200a mArea =
2
2[ ]69.25a mArea =
2_ [ ]269.25a Total mArea =
84/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
(0)4ξ∆
v
OO′
Section view
Given : (1) (0) (1,0)
3 4 , 3,4( ), , T ExtM ξξ ξ Find : *4ξ (1) (0) (0)
4 4 4( )ξ ξ ξ+ ∆=
(1,0) (1,0) (1,0) (1,0)3,4 3,4 3,4 3,4(1,0)
3,4 (1,0) (1,0) (1,0)3,4 3,4 3,4
* (0)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z g IM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ − ⋅= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (24)
0 step, Heel
Static equilibrium? Check!
( )1*4 4ξ ξ=
?
(1,1)3,4( ) 0TM ξ =
?
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
4
4
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
<Transverse moment of (ξ3,4(1,1)) >
(1,1)3,4
(1,1) (1,1)3,4 3,4( ) () )(TB B BM y Fξ ξξ= ⋅
(1,1)3,4
(1,1) (1,1)3,4 3,4( ) () )(TG G GM y Fξ ξξ= ⋅
(1,1) (1,1) (1,1)3,4 3,4 3,4, ( ) ( ) ( )T Ext Ext ExtM y Fξ ξ ξ= ⋅
(1,1)3,4( )TM ξ
(1,1)3,4( ) (0, 1.64,4.72)G ξ = −(1,1)3,4( ) (0, 2.99, 5.48)B ξ = − −(1,1)3,4( ) (0, 9.24, 6.5)g ξ = − −
(1,1)3,4
5( ) 4.0 10 [ ]B kNF ξ = ×
(1,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×
(1,1)3,4
4( ) 5.39 10 [ ]ExtF kNξ = − ×
(1,1)3,4
(1,1)3,4
(1,1)3,4 ,( () )( ) T ExBG tT TM M Mξ ξξ= ++
5( 1.64) ( 3.6 10 )= − ⋅ − ×55.8895 10 [ ]kN m= × ⋅
5( 2.99) (4.0 10 )− ⋅ ×=61.1953 10 [ ]kN m= − × ⋅
(1,1) (1,1)3,4 3,4( ) ( )g Exty Fξ ξ= ⋅
4( 9.24) ( 5.39 10 )= − ⋅ − ×54.9751 10 [ ]kN m= × ⋅
[ ]kN m⋅5 6 55.8895 10 [ ] 1.1953 10 [ ] 4.9751 10kN m kN m= × ⋅ − × ⋅ + ×51.088 10 [ ]kN m= − × ⋅
stImmersion 1 step
4
(1,1)3,4( ) 0TM ξ ≠ ( )1*
4 4ξ ξ≠
85/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (25)
0 step
(0) (0) (0)3 4( [0,0, , ,0,0])ξ ξ=r
(0) (1) (0)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
-36,000 -360,000 360,000 -36,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 400,000 -40,000
-400,000 0 0 -400,000
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r
-13,850 -360,000 400,000 -53,850
-108,798 588,950 -1,195,257 497,508
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
Start Immersion 1st step.End of Heel 0 step.
Immersion
(0) (1) (0)3 4( [0,0, , ,0,0] )Tξ ξ=r
(0) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 0 step
1st step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
LC
O′
(0,0)3,4( )G ξ
v
,z z′
,y y′(0,0)3,4( )g ξ
(0,0)3,4( )B ξ
O
(1,0)3,4( )G ξ
v(1,0)3,4( )g ξ
y
,z z′
LC
O
y′(1,0)3,4( )B ξ
(0)3ξ∆
O′
ξ3 : immersionξ4 : heel
y
z
G
z′
y′
g B
( )04ξ∆
v
OO′
86/120
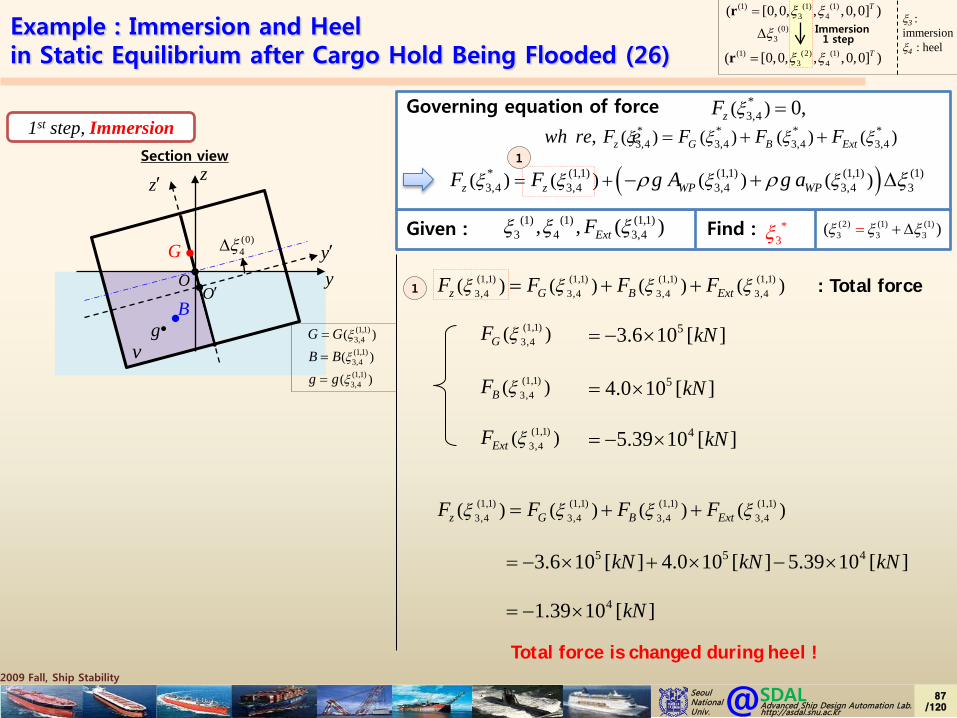
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
gB
v
OO′
Section view
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (26)
1st step, Immersion
(1,1)3,4( )BF ξ
(1,1)3,4( )GF ξ
(1,1) (1,1) (1,1) (1,1)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
(1,1)3,4( )ExtF ξ 45.39 10 [ ]kN= − ×
53.6 10 [ ]kN= − ×
54.0 10 [ ]kN= ×
(1,1) (1,1) (1,1) (1,1)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= + +
5 5 43.6 10 [ ] 4.0 10 [ ] 5.39 10 [ ]kN kN kN= − × + × − ×
41.39 10 [ ]kN= − ×
Total force is changed during heel !
1
1
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
: Total force
(0)4ξ∆
87/120
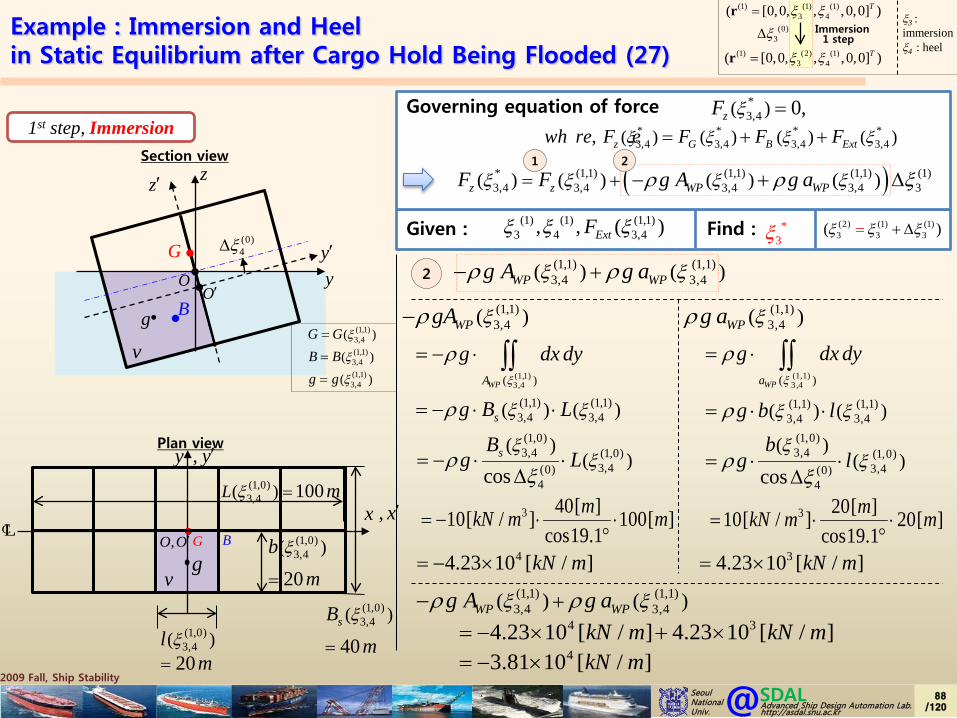
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
(1,1) (1,1)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ+−
(1,1) (1,1)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ+−y
z
G
z′
y′
g B
v
OO′
Section view
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (27)
1st step, Immersion
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
1 2
Plan view
x
y
LC(1,0)3,4( )
20b
mξ
=
,O O′G
v
, x′
, y′
, B
(1,0)3,4( ) 100L mξ =
g
(1,0)3,4( )
40sB
mξ
=(1,0)3,4( )
20l
mξ
=
2
(1,1)3,4( )WPgA ξρ−
(1,1)3,4( )WPA
g dx dyξ
ρ= − ⋅ ∫∫(1,1) (1,1)3,4 3,4( ) ( )sg B Lξ ξρ= − ⋅ ⋅
3 40[ ]10[ / ] 100[ ]cos19.1
mkN m m= − ⋅ ⋅°
44.23 10 [ / ]kN m= − ×
(1,1)3,4( )WPg a ξρ
(1,1)3,4( )WPa
g dx dyξ
ρ= ⋅ ∫∫(1,1) (1,1)3,4 3,4( ) ( )g b lξ ξρ= ⋅ ⋅
3 20[ ]10[ / ] 20[ ]cos19.1
mkN m m= ⋅ ⋅°
34.23 10 [ / ]kN m= ×
(0)4ξ∆
(1,0)3,4 (1,0)
3,4(0)4
( )( )
cossB
g Lξ
ξρξ
= − ⋅ ⋅∆
(1,0)3,4 (1,0)
3,4(0)4
( )( )
cosb
g lξ
ξρξ
= ⋅ ⋅∆
43.81 10 [ / ]kN m= − ×
4 34.23 10 [ / ] 4.23 10 [ / ]kN m kN m= − × + ×
88/120
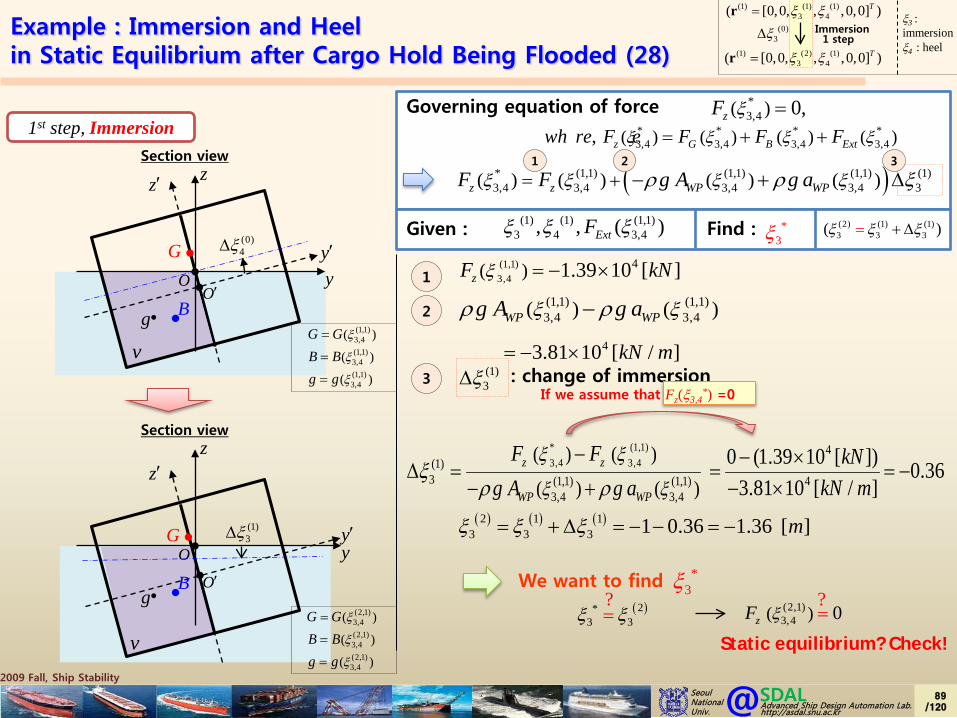
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
z′
y′
O′
(1,1) (1,1)3,4 3,4( ) ( )WP WPg A g aξ ξρ ρ−
y
z
G
z′
y′
g B
v
OO′
Section view
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (28)
1st step, Immersion
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(1,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
1 2
2
(0)4ξ∆
1(1,1)3,4
4( ) 1.39 10 [ ]zF kNξ = − ×
43.81 10 [ / ]kN m= − ×3 : change of immersion(1)
3ξ∆
* (1,1)3,4 3,4(1)
3 (1,1) (1,1)3,4 3,4
( ) ( )
( ) ( )z z
WP WP
F Fg A g a
ξ ξ
ξ ξξ
ρ ρ−
∆ =− +
If we assume that Fz(ξ3,4*) =0
4
4
0 (1.39 10 [ ]) 0.363.81 10 [ / ]
kNkN m
− ×= = −
− ×( ) ( ) ( )2 1 1
3 3 3 1 0.36 1.36 [ ]mξ ξ ξ= + ∆ = − − = −
We want to find *3ξ
Static equilibrium? Check!
( )2*3 3ξ ξ=
? (2,1)3,4( ) 0zF ξ =
?
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
3
89/120
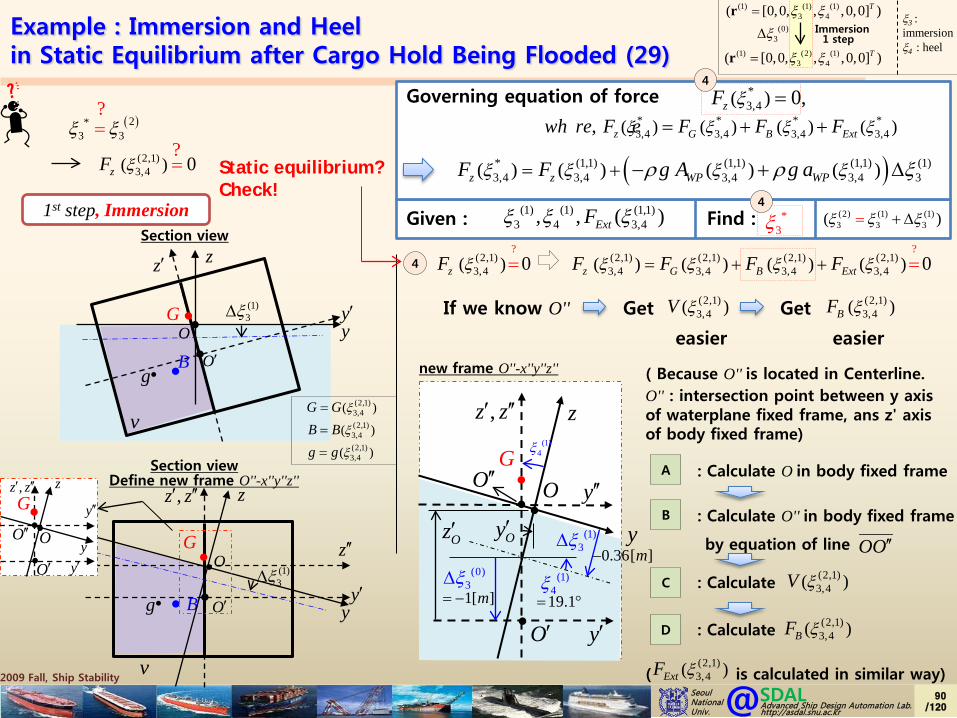
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (29)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
4
new frame O''-x''y''z''
GOO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
(1)3ξ∆
0.36[ ]m−Oz′ Oy′
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
( Because O'' is located in Centerline.O'' : intersection point between y axis of waterplane fixed frame, ans z' axis of body fixed frame)
If we know O'' Get (2,1)3,4( )V ξ
easier
(2,1)3,4( )BF ξGet
easier
A : Calculate O in body fixed frame
B : Calculate O'' in body fixed frame
C(2,1)3,4( )V ξ: Calculate
by equation of line OO′′
D(2,1)3,4( )BF ξ: Calculate
( is calculated in similar way)(2,1)3,4( )ExtF ξ
90/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (30)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
4
Define new frame O''-x''y''z''
(1) (1)3 4( ) sinOy ξ ξ′ = − −∆ ⋅
( 0.36) sin19.1= − − ⋅
0.12[ ]m=
(0) (1) (1)3 3 4( ) ( ) sinOz ξ ξ ξ′ = − ∆ − ∆ ⋅
( 1) (0.36) sin19.1= − − − ⋅
1.34[ ]m=
( , , )O O Ox y z′ ′ ′ (0,0.12,1.34)=
GO
y
z,z z′ ′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
(1)3ξ∆
0.36[ ]m−Oz′ Oy′
A
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
: O B : O'' C (2,1)3,4( ): V ξ D (2,1)
3,4( ): BF ξ
Calculate Origin of waterplane fixed frame in body fixed frame ( , , )O O Ox y z′ ′ ′
91/120
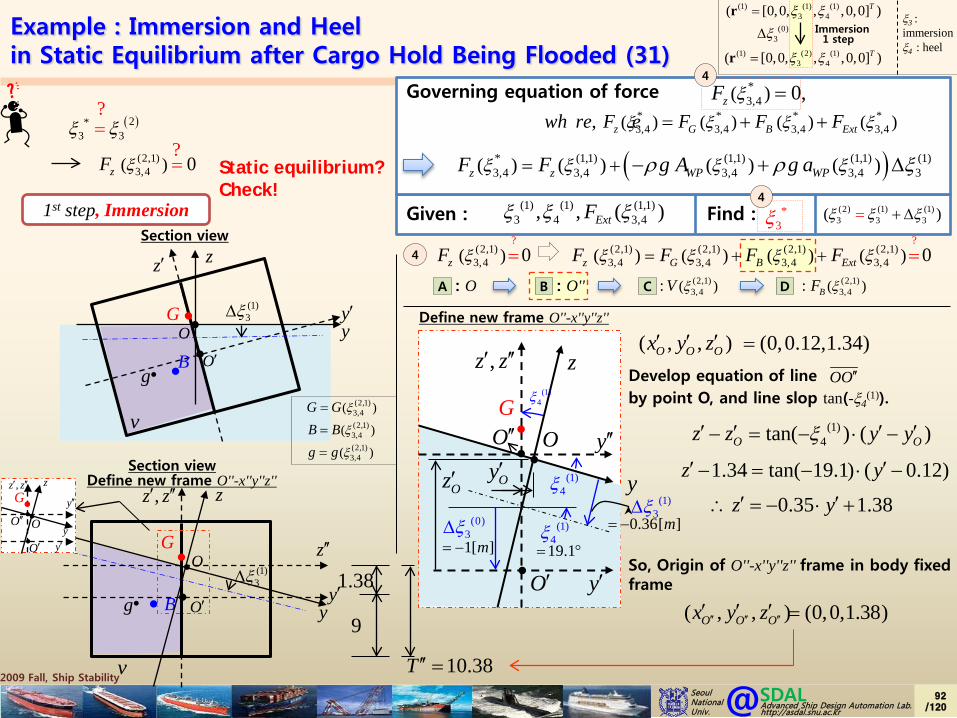
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (31)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view
4
Define new frame O''-x''y''z''
1.38
9
10.38T ′′ =
So, Origin of O''-x''y''z'' frame in body fixed frame
Develop equation of line OO′′by point O, and line slop tan(-ξ4
(1)).
(1)4tan( ) ( )O Oz z y yξ′ ′ ′ ′− = − ⋅ −
( , , )O O Ox y z′ ′ ′ (0,0.12,1.34)=
1.34 tan( 19.1) ( 0.12)z y′ ′− = − ⋅ −
GOO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
(1)4ξ
(1)3ξ∆
0.36[ ]m= −0.35 1.38z y′ ′∴ = − ⋅ +
( , , )O O Ox y z′′ ′′ ′′′ ′ ′ (0,0,1.38)=
Oz′ Oy′
A
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
: O B : O'' C (2,1)3,4( ): V ξ D (2,1)
3,4( ): BF ξ
92/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (32)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view
4
A2
A3
A1
Area of A1 in O''-x''y''z'' frame
1A sArea B T′′ ′′= ⋅ 240[ ] 10.38[ ] 415.39[ ]m m m= ⋅ =
10.38[ ]T m′′ =Draft in O''-x''y''z'' frame
2 3( )A AArea Area=
{ }0.5 (40 / 2[ ]) (40 / 2)[ ] tan(19.1)m m= ⋅ ⋅ ⋅269.25[ ]m=
Area of A3 (=A2)in O''-x''y''z'' frame
A3
/ 2sB′′
(0)4( / 2) tan( )sB ξ′′ ⋅ ∆
(0)4ξ∆
{ }(0)40.5 ( / 2) ( / 2) tan( )s sB B ξ′′ ′′= ⋅ ⋅ ∆
10.38T ′′ =
A
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
: O B : O'' C (2,1)3,4( ): V ξ D (2,1)
3,4( ): BF ξ
93/120
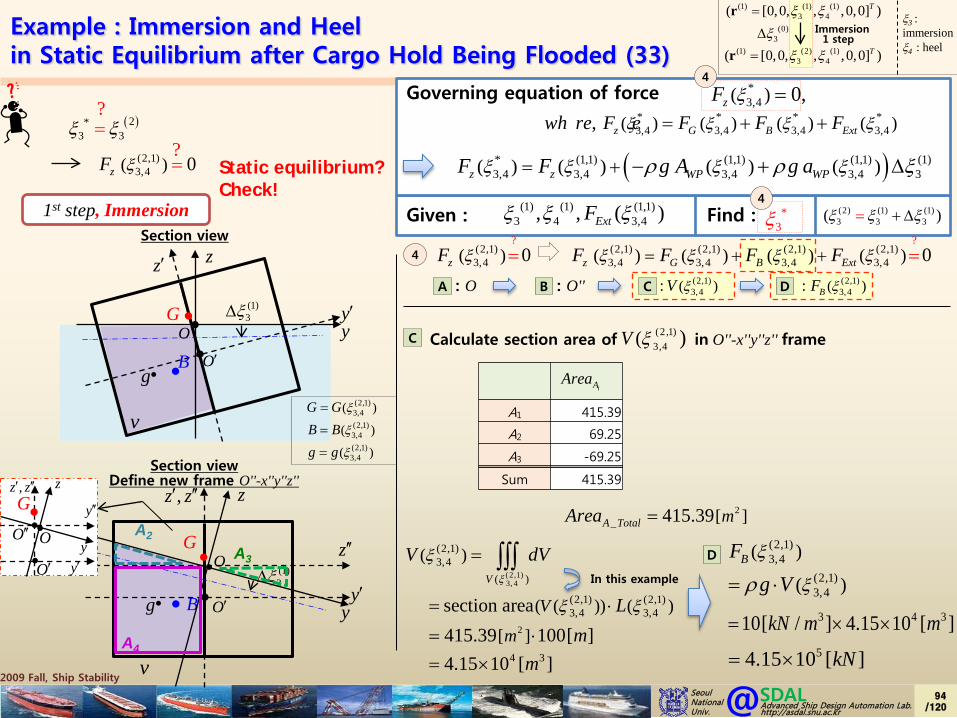
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (33)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
4
A1 415.39
A2 69.25
A3 -69.25
Sum 415.39
iAArea
Calculate section area of in O''-x''y''z'' frame(2,1)3,4( )V ξ
A2
A3
A4
2_ [ ]415.39A Total mArea =
A
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
: O B : O'' C (2,1)3,4( ): V ξ D (2,1)
3,4( ): BF ξ
( 2,1)3, 4
(2,1)3,4
( )
( )V
V dVξ
ξ = ∫∫∫
2[ ]415.39 100[ ]m m= ⋅
(2,1) (2,1)3,4 3,4( ( )) ( )section area V Lξ ξ= ⋅
In this example
4 34.15 10 [ ]m= ×
(2,1)3,4( )BF ξ
(2,1)3,4( )g V ξρ= ⋅3 4 310[ / ] 4.15 10 [ ]kN m m= × ×54.15 10 [ ]kN= ×
C
D
94/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (34)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
,z z′ ′′
y′O′ y
z
g B
v
OG
Define new frame O''-x''y''z''
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
4
A2
A3
A4
Calculate section area of flooded volume in O''-x''y''z'' frame of(2,1)3,4ξ
1_ 4 2 22
AA flooded A A A
AreaArea Area Area Area= + = +
22[ ]
[ ]415.39 69.25
2m
m= +
2[ ]276.95 m=
4 (2,13,4
?)( ) 0zF ξ = (2,1) (2,1) (2,1) (2,1)
3,4 3,4 3,4 3 4
?
,( ) ( ) ( ) ( ) 0z G B ExtF F F Fξ ξ ξ ξ= + + =
A : O B : O'' C (2,1)3,4( ): v ξ D (2,1)
3,4( ): ExtF ξ
(in previous calculation)
( 2,1)3, 4
(2,1)3,4
( )
( )v
v dvξ
ξ = ∫∫∫
2[ ]276.95 20[ ]m m= ⋅
(2,1) (2,1)3,4 3,4( ( )) ( )section area v lξ ξ= ⋅
In this example
3 35.54 10 [ ]m= ×
(2,1)3,4( )ExtF ξ
(2,1)3,4( )g v ξρ= − ⋅3 4 310[ / ] 5.54 10 [ ]kN m m= − × ×45.54 10 [ ]kN= − ×
C
D
95/120
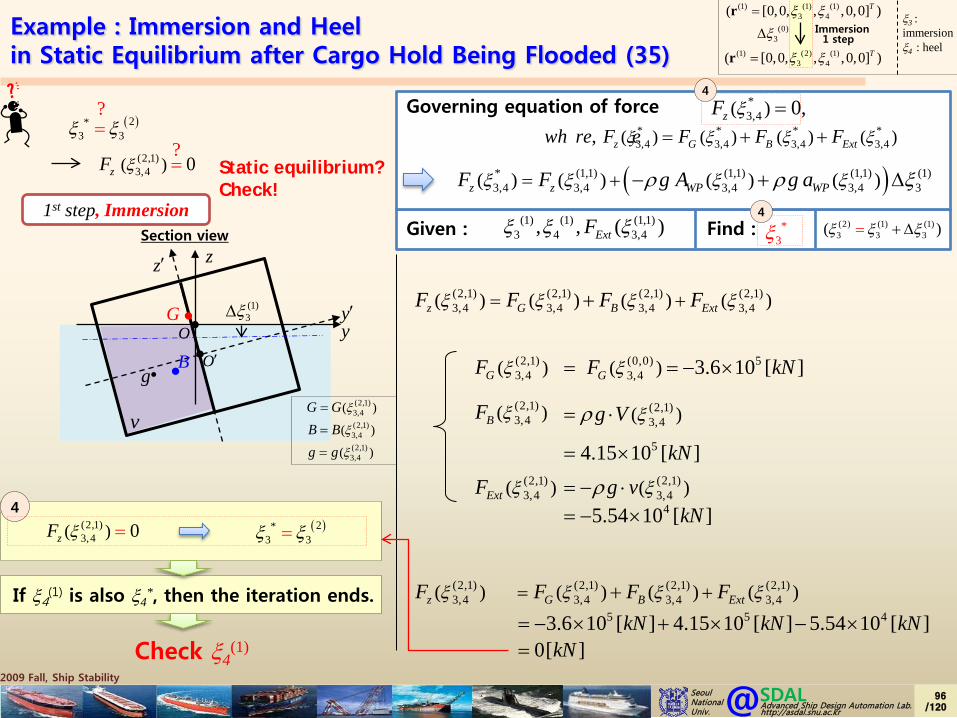
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
( )* (1,1) (1,1) (1,1) (1)3,4 3,4 3,4 3,4 3( ) ( ) ( ) ( )z z WP WPF F g A g aξ ξ ξ ξρ ρ ξ= + − + ∆
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Given : Find :
Governing equation of force
(1) (1) (1,1)3 4 3,4, , ( )ExtFξ ξ ξ
*3,4( ) 0,zF ξ =
(2) (1) (1)3 3 3( )ξ ξ ξ+ ∆=
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (35)
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
*3ξ
ξ3 : immersionξ4 : heel
4
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
1st step, Immersion
(2,1)3,4( ) 0zF ξ = Static equilibrium?
Check!
( )2*3 3ξ ξ=
?
?
4
(2,1)3,4( )BF ξ
(2,1)3,4( )GF ξ
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4( ) ( ) ( ) ( )z G B ExtF F F Fξ ξ ξ ξ= ++
(2,1)3,4( )ExtF ξ (2,1)
3,4( )g v ξρ= − ⋅
(0,0) 53,4( ) 3.6 10 [ ]GF kNξ= = − ×
(2,1)3,4( )g V ξρ= ⋅54.15 10 [ ]kN= ×
(2,1)3,4( )zF ξ (2,1) (2,1) (2,1)
3,4 3,4 3,4( ) ( ) ( )G B ExtF F Fξ ξ ξ= ++5 5 43.6 10 [ ] 4.15 10 [ ] 5.54 10 [ ]kN kN kN= − × + × − ×
0[ ]kN=
45.54 10 [ ]kN= − ×4(2,1)3,4( ) 0zF ξ = ( )2*
3 3ξ ξ=
If ξ4(1) is also ξ4
*, then the iteration ends.
Check ξ4(1)
96/120
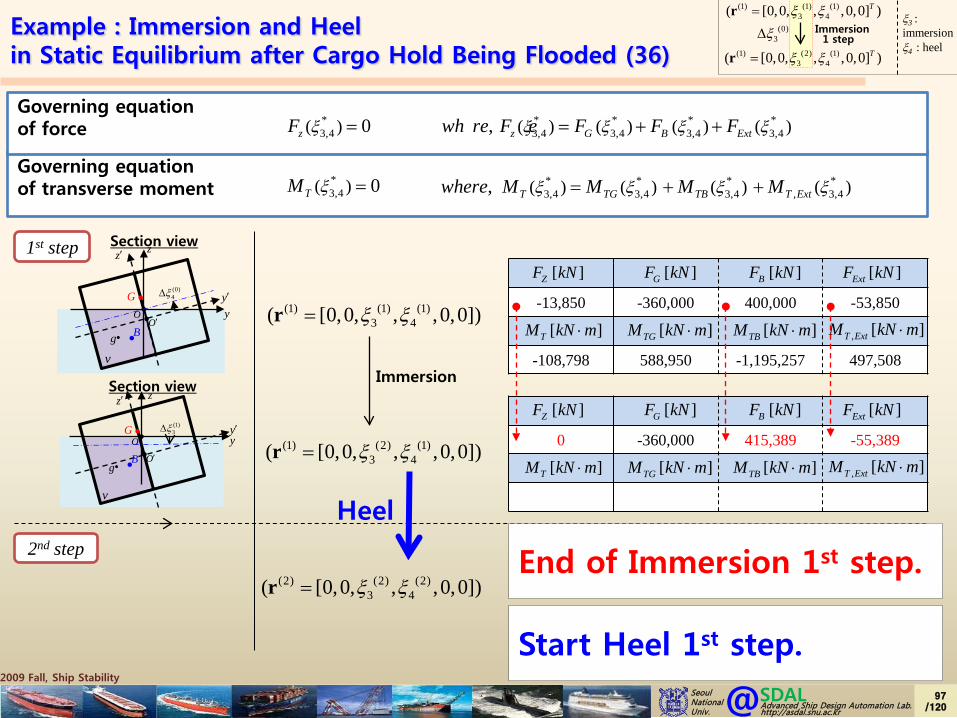
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
-13,850 -360,000 400,000 -53,850
-108,798 588,950 -1,195,257 497,508
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (36)
1st step
2nd step
(1) (1) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0])ξ ξ=r
(2) (2) (2)3 4( [0,0, , ,0,0])ξ ξ=r
Immersion
Heel
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
0 -360,000 415,389 -55,389
[ ]ZF kN [ ]GF kN [ ]BF kN [ ]ExtF kN
[ ]TM kN m⋅ [ ]TGM kN m⋅ [ ]TBM kN m⋅ , [ ]T ExtM kN m⋅
End of Immersion 1st step.
Start Heel 1st step.
(1) (1) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
Immersion(0)3ξ∆ 1 step
* * * *3,4 3,4 3,4 , 3,4( ) ( ) ( ) ( ), T TG TB T Extwhere M M M Mξ ξ ξ ξ= + +
Governing equationof transverse moment
*3,4( ) 0TM ξ =
* * * *3,4 3,4 3,4 3,4( ) ( ) ( ) ( ), z G B Extwh ere F F F Fξ ξ ξ ξ= + +
Governing equationof force
*3,4( ) 0zF ξ =
ξ3 : immersionξ4 : heel
y
z
G
z′
y′
g B
v
OO′
Section view
(0)4ξ∆
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
97/120
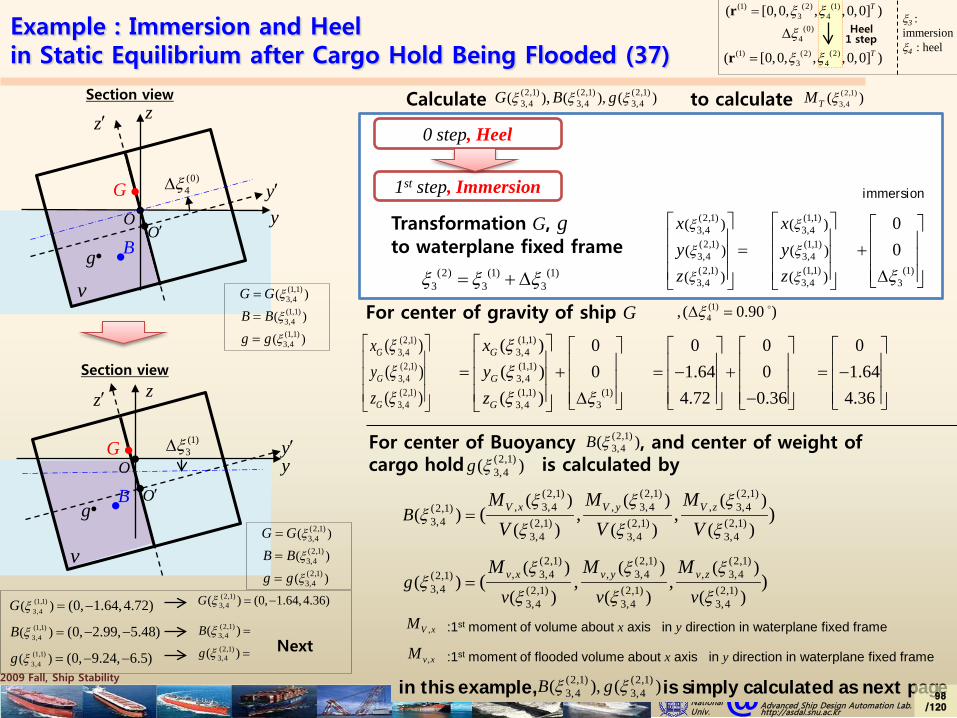
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
y
z
G
z′
y′
g B
v
OO′
Section view
(0)4ξ∆
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (37)
(2,1)3,4( ) (0, 1.64,4.36)G ξ = −
(2,1)3,4( )B ξ =(2,1)3,4( )g ξ =
0 step, Heel
1st step, Immersion
(1,1)3,4(1,1)3,4(1,1) (1)3,4 3
( ) 0( ) 0( )
G
G
G
xyz
ξξξ ξ
= + ∆
(2,1)3,4(2,1)3,4(2,1)3,4
( )( )( )
G
G
G
xyz
ξξξ
01.64
4.36
= −
For center of gravity of ship G
0 01.64 0
4.72 0.36
= − + −
(1)4, ( 0.90 )ξ∆ =
Next
(1,1)3,4( )G G ξ=(1,1)3,4( )B B ξ=(1,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1) (2,1) (2,1), 3,4 , 3,4 , 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )V x V y V zBM M M
V V Vξ ξ ξ
ξξ ξ ξ
=
,V xM :1st moment of volume about x axis in y direction in waterplane fixed frame
For center of Buoyancy , and center of weight of cargo hold is calculated by
(2,1)3,4( )B ξ
(2,1)3,4( )g ξ
(2,1) (2,1) (2,1), 3,4 , 3,4 , 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )v x v y v zg
v v v
M M Mξ ξ ξξ
ξ ξ ξ=
,v xM :1st moment of flooded volume about x axis in y direction in waterplane fixed frame
(1,1)3,4(1,1)3,4(1,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
=
(1)3
00ξ
+ ∆ (2) (1) (1)
3 3 3ξ ξ ξ= + ∆
immersion
in this example, is simply calculated as next page(2,1) (2,1)3,4 3,4( ), ( )B gξ ξ
(1,1)3,4( ) (0, 1.64,4.72)G ξ = −(1,1)3,4( ) (0, 2.99, 5.48)B ξ = − −(1,1)3,4( ) (0, 9.24, 6.5)g ξ = − −
to calculate (2,1)3,4( )TM ξCalculate (2,1) (2,1) (2,1)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
98/120
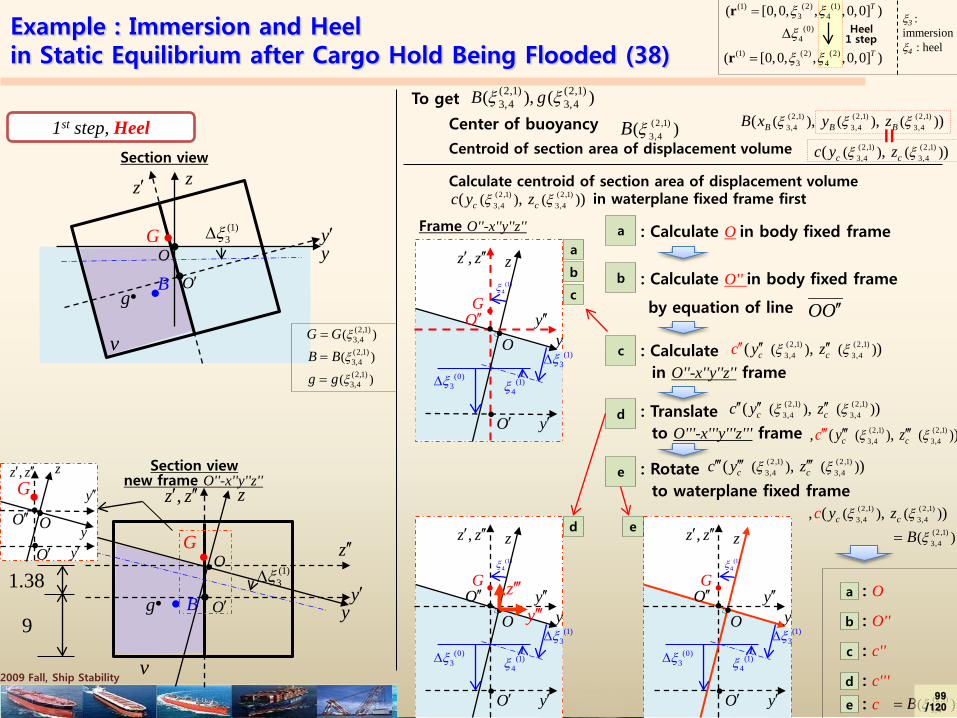
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (38)
,z z′ ′′
y′O′ y
z
g B
v
OG
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view
Frame O''-x''y''z''
1.38
9
1st step, Heel
new frame O''-x''y''z''
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
G
OO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆ (1)
4ξ
(1)4ξ
(1)3ξ∆
To get (2,1) (2,1)3,4 3,4( ), ( )B gξ ξ
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξCenter of buoyancy
Calculate centroid of section area of displacement volume in waterplane fixed frame first
a : Calculate O in body fixed frame
b : Calculate O'' in body fixed frame
c
by equation of line OO′′
d
: Calculatein O''-x''y''z'' frame
(2,1) (2,1)3,4 3,4( ) ( )( , )c cy zc ξ ξ′′′′ ′′
c
b
a
G
OO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆ (1)
4ξ
(1)4ξ
(1)3ξ∆
y′′′z′′′
d
e
: Translateto O'''-x'''y'''z''' frame
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξ′′ ′′ ′′
(2,1) (2,1)3,4 3,4( ) ( ), ( , )c cy zc ξ ξ′′′ ′′′ ′′′
G
OO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆ (1)
4ξ
(1)4ξ
(1)3ξ∆
e
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξ
: Rotateto waterplane fixed frame
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξ′′′ ′′′ ′′′
(2,1) (2,1)3,4 3,4( ) ( ), ( , )c cy zc ξ ξ
(2,1)3,4( )B ξ=
a : O
b : O''
c : c''
d : c'''e : c (2,1)
3,4( )B ξ=
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
99/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (39)
,z z′ ′′
y′O′ y
z
g B
v
OG
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view G
OO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
Frame O''-x''y''z''
1.38
9
(1)3ξ∆
0.36[ ]m−
1st step, Heel
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of buoyancy
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
1
new frame O''-x''y''z''
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
Oy′Oz′
( , , )O O OO x y z′ ′ ′ (0,0.12,1.34)=
a : O b : O'' c : c'' d : c''' e : c (2,1)3,4( )B ξ=
a
Same in 1st Step, Immersion
Origin of O''-x''y''z'' frame in body fixed frame
( , , )O O Ox y z′′ ′′ ′′′ ′ ′ (0,0,1.38)=
Origin of O-xyz frame in body fixed frame
b
Same in 1st Step, Immersion
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
100/120
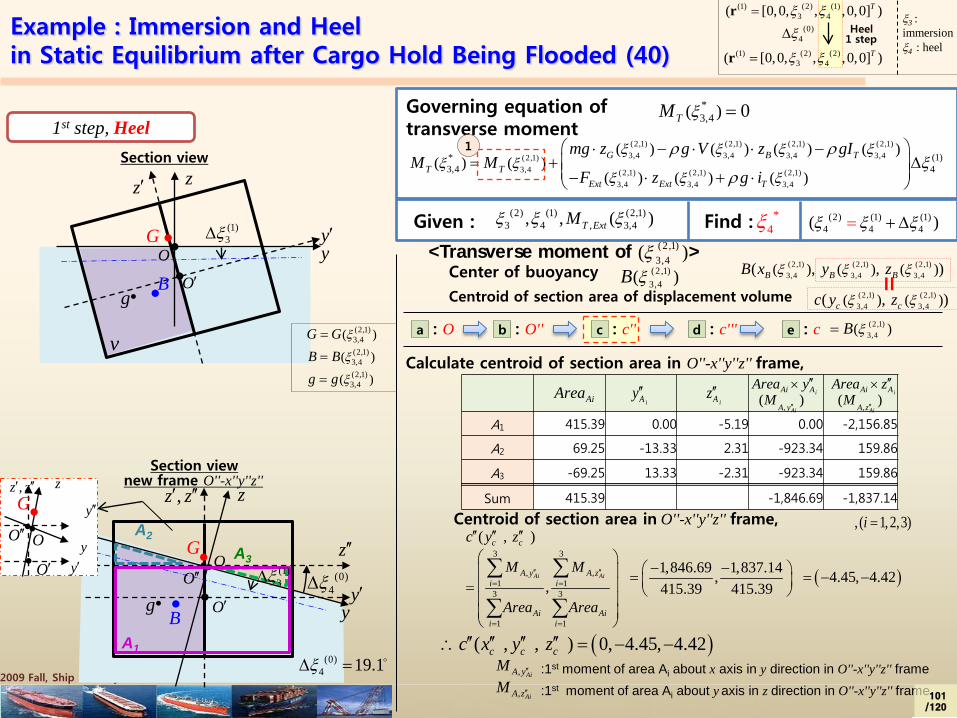
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆ Given :
(2) (1) (2,1)3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *
4ξ (2) (1) (1)4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (40)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
1
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
Calculate centroid of section area in O''-x''y''z'' frame,
A1 415.39 0.00 -5.19 0.00 -2,156.85
A2 69.25 -13.33 2.31 -923.34 159.86
A3 -69.25 13.33 -2.31 -923.34 159.86
Sum 415.39 -1,846.69 -1,837.14
3 3
, ,1 1
3 3
1 1
( , )
,Ai Ai
c c
A y A zi i
Ai Aii i
c y z
M M
Area Area
′′ ′′= =
= =
′′ ′′ ′′ =
∑ ∑
∑ ∑
, AiA yM ′′ :1st moment of area Ai about x axis in y direction in O''-x''y''z'' frame
, AiA zM ′′ :1st moment of area Ai about y axis in z direction in O''-x''y''z'' frame
( )( , , ) 0, 4.45, 4.42c c cc x y z′′ ′′ ′′ ′′∴ = − −
iAy′′
, ( 1, 2,3)i =
,( )
AiA yM
′′
iAi AArea y′′×,
( )AiA z
M′′
iAi AArea z′′×
1,846.69 1,837.14,415.39 415.39
− − =
AiArea
Centroid of section area in O''-x''y''z'' frame,
( )4.45, 4.42= − −
iAz′′
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of buoyancy
,z z′ ′′
y′O′ y
z
gB
OG
new frame O''-x''y''z''G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
A2
A3
A1(0)
4 19.1ξ∆ =
(0)4ξ∆O′′ (1)
3ξ∆
a : O b : O'' c : c'' d : c''' e : c (2,1)3,4( )B ξ=
101/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (41)
,z z′ ′′
y′O′ y
z
g B
v
OG
(1)3ξ∆
G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view G
OO′′
y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
,O′′′
New frame O'''-x'''y'''z'''
1.38
9O Oy y′′′′′ ′=
0.12=
(1)3ξ∆
0.36[ ]m−
1.38O Oz z′′′′′ ′= − 1.34 1.38= − 0.04= −
O O′′ ′′′ 2 2( ) ( )O Ox y′′′ ′′′′′ ′′= + 2 2(0.12) ( 0.04)= + − 0.13=
1st step, Heel
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of buoyancy
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
1
new frame O''-x''y''z''
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
,O O′′′O′′
Oy ′′′′′
(1)4ξ
Oz ′′′′′
(1)3ξ∆0.36[ ]m= −
0.38Oy′
Oz′
( , , )O O OO x y z′ ′ ′ (0,0.12,1.34)=
a : O b : O'' c : c'' d : c''' e : c (2,1)3,4( )B ξ=
a
Same in 1st Step, Immersion
b
y′′′z′′′
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
102/120
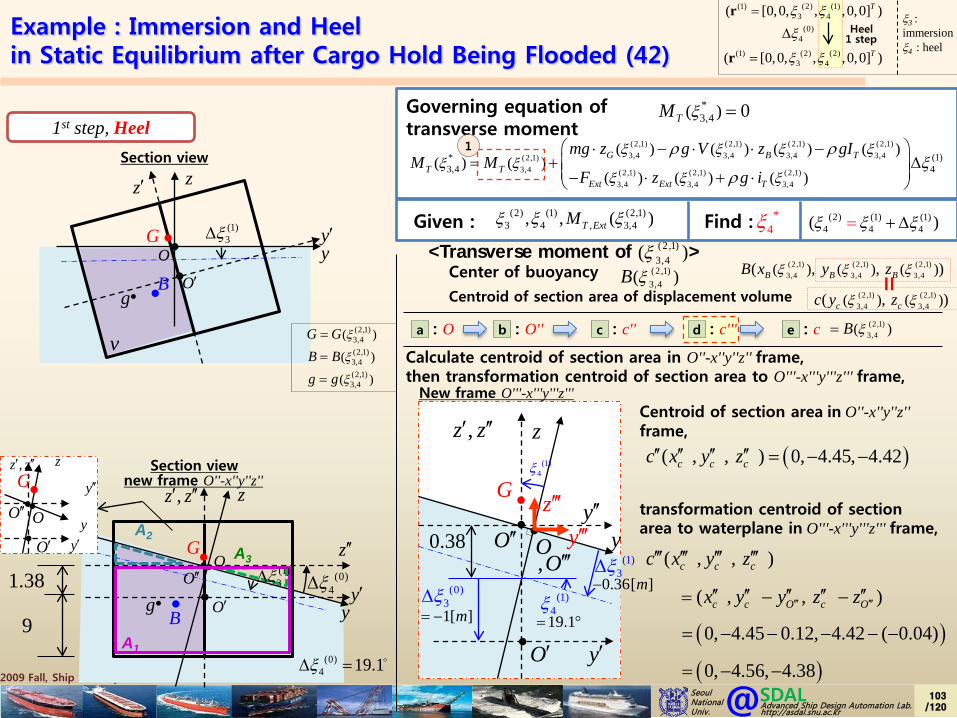
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
G
OO′′ y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(1)4ξ
,O′′′
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆ Given :
(2) (1) (2,1)3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *
4ξ (2) (1) (1)4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (42)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
1
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of buoyancy
,z z′ ′′
y′O′ y
z
gB
OG
new frame O''-x''y''z''G
OO′′y
z,z z′ ′′
y′′
y′O′ z′′
Section view
A2
A3
A1(0)
4 19.1ξ∆ =
(0)4ξ∆O′′ (1)
3ξ∆1.38
9
0.38(1)
3ξ∆0.36[ ]m−
New frame O'''-x'''y'''z'''
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to O'''-x'''y'''z''' frame,
( )( , , ) 0, 4.45, 4.42c c cc x y z′′ ′′ ′′ ′′ = − −
Centroid of section area in O''-x''y''z'' frame,
transformation centroid of section area to waterplane in O'''-x'''y'''z''' frame,
( , , )c c cc x y z′′′ ′′′ ′′′ ′′′
( )0, 4.45 0.12, 4.42 ( 0.04)= − − − − −
( , , )c c O c Ox y y z z′′′ ′′′′′ ′′ ′′ ′′ ′′= − −
( )0, 4.56, 4.38= − −
y′′′z′′′
a : O b : O'' c : c'' d : c''' e : c (2,1)3,4( )B ξ=
103/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆ Given :
(2) (1) (2,1)3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *
4ξ (2) (1) (1)4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (43)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
1
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,1) (2,1)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,1)3,4( )B ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of buoyancy
,z z′ ′′
y′O′ y
z
gB
OG
Define new frame O''-x''y''z''G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
A2
A3
A1(0)
4 19.1ξ∆ =
(0)4ξ∆O′′ (1)
3ξ∆
( )( , , ) 0, 4.56, 4.38c c cc x y z′′′ ′′′ ′′′ ′′′∴ = − −
(2,1)3,4(2,1)3,4(2,1)3,4
( )( )( )
c
c
c
xyz
ξ
ξ
ξ
=
(2,1)3 4( ) (0, 2.88, 5.63)B ξ∴ = − −
(0) (0)4 4(0) (0)
4 4
1 0 0 00 cos sin 4.560 sin cos 4.38
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
(0)4, ( 19.1 )ξ∆ =
Calculate centroid of section area in O'''-x'''y'''z''' frame,
then transformation centroid of section area to waterplane fixed frame.
(2 ,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )c c cc x y zξ ξ ξ
02.885.63
= − −
(0) (0)4 4(0) (0)
4 4
1 0 00 cos sin0 sin cos
c
c
c
xyz
ξ ξξ ξ
′′′ ′′′= ∆ − ∆
′′′ ∆ ∆
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 2.88, 5.63)c c cc x y zξ ξ ξ∴ = − −
(1,1)3,4of ξ
a : O b : O'' c : c'' d : c''' e : c (2,1)3,4( )B ξ=
104/120
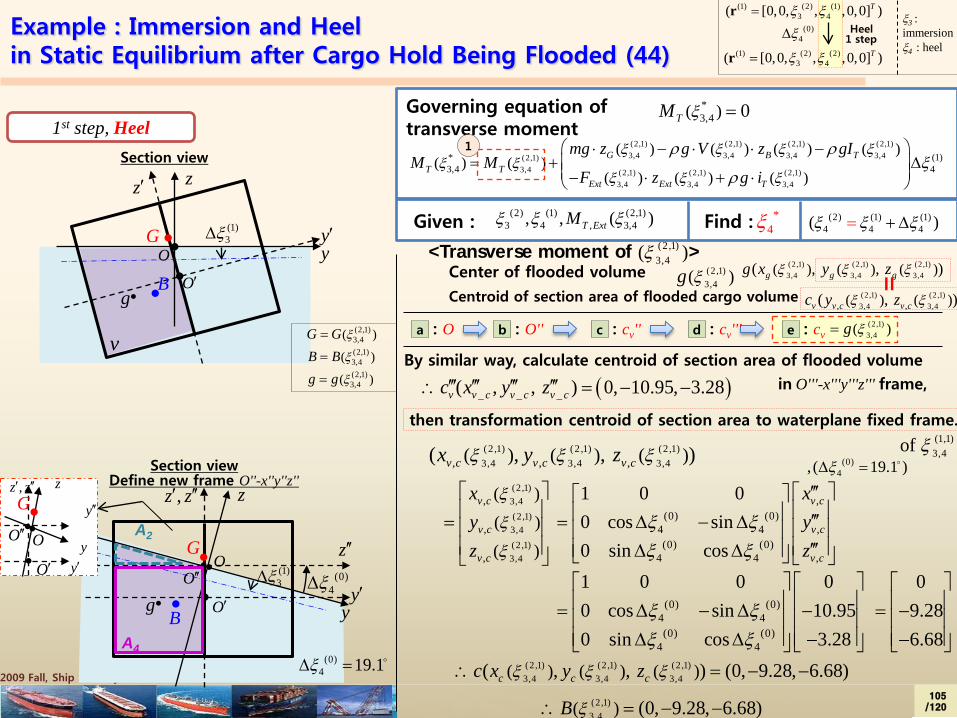
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆ Given :
(2) (1) (2,1)3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *
4ξ (2) (1) (1)4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (44)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
1
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , )g g gg x y zξ ξ ξ
(2,1) (2,1)3,4 3,4, ,( ) ( )( , )v v c v cc y zξ ξCentroid of section area of flooded cargo volume
=(2,1)3,4( )g ξ
<Transverse moment of >(2,1)3,4( )ξ
Center of flooded volume
,z z′ ′′
y′O′ y
z
gB
OG
Define new frame O''-x''y''z''G
OO′′y
z,z z′ ′′
y′′
y′O′z′′
Section view
A2
A4(0)
4 19.1ξ∆ =
(0)4ξ∆O′′ (1)
3ξ∆
(2 ,1) (2,1) (2,1)3,4 3,4 3,4, , ,( ) ( ) ( )( , , )v c v c v cx y zξ ξ ξ
09.286.68
= − −
,(0) (0)
4 4 ,(0) (0)
4 4 ,
1 0 00 cos sin0 sin cos
v c
v c
v c
xyz
ξ ξξ ξ
′′′ ′′′= ∆ − ∆ ′′′ ∆ ∆
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 9.28, 6.68)c c cc x y zξ ξ ξ∴ = − −
(1,1)3,4of ξ
( )_ _ _( , , ) 0, 10.95, 3.28v v c v c v cc x y z′′′ ′′′ ′′′ ′′′∴ = − −
(2,1)3,4(2,1)3,4(2,1)3,4
,
,
,
( )( )( )
v c
v c
v c
xyz
ξ
ξ
ξ
=
(2,1)3 4( ) (0, 9.28, 6.68)B ξ∴ = − −
(0) (0)4 4(0) (0)
4 4
1 0 0 00 cos sin 10.950 sin cos 3.28
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆ −
(0)4, ( 19.1 )ξ∆ =
By similar way, calculate centroid of section area of flooded volume
then transformation centroid of section area to waterplane fixed frame.
a : O b : O'' c : cv'' e : cv(2,1)3,4( )g ξ=d : cv'''
in O'''-x'''y'''z''' frame,
105/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆ Given :
(2) (1) (2,1)3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *
4ξ (2) (1) (1)4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (45)
1st step, Heel
-Total transverse moment
(2,1)3,
(2,1) (2,1)3,4 3
(2,1)3 ,4,44 ,( ) (( )( ) )TT T ExBTG tM MMMξ ξξ ξ+= +1
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
1
(2,1)3,4( ), (0, 1.64,4.36)G ξ = −(2,1)3,4( ) (0, 2.88, 5.63), B ξ − −=(2,1)3,4( ) (0, 9.28, 6.68), g ξ − −=
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.15 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 5.54 10 [ ]ExtF kNξ = − ×
(2,1)3,4( )TM ξ
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
<Transverse moment of (ξ3(1),ξ4
(1)) >
(2,1)3,4
(2,1) (2,1)3,4 3,4( ) () )(TB B BM y Fξ ξξ= ⋅
(2,1)3,4
(2,1) (2,1)3,4 3,4( ) () )(TG G GM y Fξ ξξ= ⋅
(2,1) (2,1) (2,1)3,4 3,4 3,4, ( ) ( ) ( )T Ext Ext ExtM y Fξ ξ ξ= ⋅
5( 1.64) ( 3.6 10 )= − ⋅ − ×55.8895 10 [ ]kN m= × ⋅
5( 2.88) (5.63 10 )= − ⋅ × 61.1962 10 [ ]kN m= − × ⋅(2,1) (2,1)3,4 3,4( ) ( )g Exty Fξ ξ= ⋅
4( 9.28) ( 5.54 10 )= − ⋅ − ×55.1389 10 [ ]kN m= × ⋅
(2,1)3,4( )TM ξ (2,1)
3,4(2,1)3,4
(2,1)3,4 ,( () )( ) T ExBG tT TM M Mξ ξξ= ++
[ ]kN m⋅5 6 55.8895 10 [ ] 1.1962 10 [ ] 5.1389 10kN m kN m= × ⋅ − × ⋅ + ×49.3384 10 [ ]kN m= × ⋅
106/120
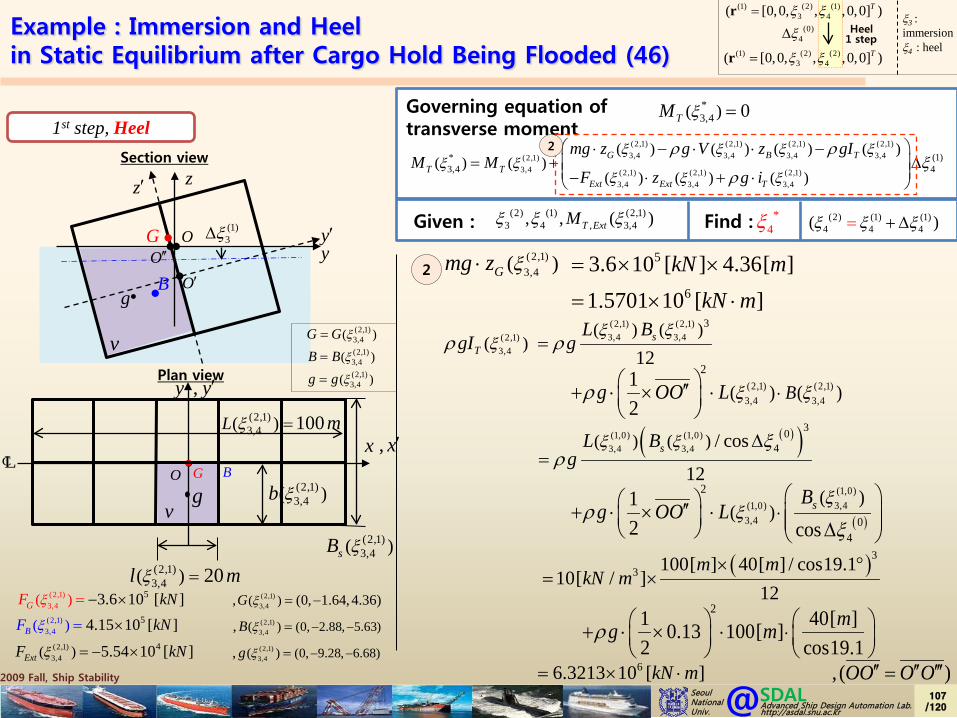
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (46)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(2,1)3,4( )b ξ
O G
v
, x′
, y′
, B
(2,1)3,4( ) 100L mξ =
g
(2,1)3,4( )sB ξ
(2,1)3,4( ) 20l mξ =
2
(2,1) (2,1)3,4 3,4(2,1)
3,4
3( ) ( )( )
12s
T
L BgI g
ξ ξξρ ρ=
( )( )(1,0) (1,0)3,4 3,4
304( ) ( ) / cos
12sL B
gξ ξ ξ
ρ∆
=
( )33 100[ ] 40[ ] / cos19.1
10[ / ]12
m mkN m
× °= ×
66.3213 10 [ ]kN m= × ⋅
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
(2,1) (2,1)3,4 3,4
2
( ) ( )12
Bg OO L ξ ξρ ⋅ ′′+ ⋅ × ⋅
( )
(1,0)3,4(1,0)
3,4
2
04
( )( )
12 cos
sBg OO L
ξξρ
ξ⋅ ′′+ ⋅ × ⋅ ∆
21 40[ ]0.13 100[ ]2 cos19.1
mg mρ ⋅ + ⋅ × ⋅
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.15 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 5.54 10 [ ]ExtF kNξ = − ×
(2,1)3,4( ), (0, 1.64,4.36)G ξ = −(2,1)3,4( ) (0, 2.88, 5.63), B ξ − −=(2,1)3,4( ) (0, 9.28, 6.68), g ξ − −=
O′′ (2,1)3,4( )Gmg z ξ⋅ 5
6
3.6 10 [ ] 4.36[ ]1.5701 10 [ ]
kN mkN m
= × ×
= × ⋅
, ( )OO O O′′ ′′ ′′′=107
/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
G
Section view
(1)3ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (47)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(2,1)3,4( )b ξ
,O O′G
v
, x′
, y′
, B
(2,1)3,4( ) 100L mξ =
g
(2,1)3,4( )sB ξ
(2,1)3,4( ) 20l mξ =
2 (2,1) (2,1)3,4 3,4( ) ( )BgV zξ ξρ ⋅
54.15 10 [ ] 5.63[ ]kN m= − × × −
62.3402 10 [ ]kN m= − × ⋅
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
2
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.15 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 5.54 10 [ ]ExtF kNξ = − ×
(2,1)3,4( ), (0, 1.64,4.36)G ξ = −(2,1)3,4( ) (0, 2.88, 5.63), B ξ − −=(2,1)3,4( ) (0, 9.28, 6.68), g ξ − −=
OO′′
(2,1) (2,1)3,4 3,4( ) ( )Ext ExtF zξ ξ⋅
( )45.54 10 [ ] 6.68 [ ]kN m= − × × −
53.6994 10 [ ]kN m= × ⋅
108/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
G
Section view
(1)3ξ∆O
O′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (48)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
2
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
Plan view
x
y
LC(2,1)3,4( )b ξ
,O O′G
v
, x′
, y′
, B
(2,1)3,4( ) 100L mξ =
g
(2,1)3,4( )sB ξ
(2,1)3,4( ) 20l mξ =
2(2,1) (2,1) 33,4 3,4(2,1)
3,4
( ) ( )( )
12T
l bgi g
ξ ξξρ ρ
⋅=
,(parallel axis theorem)
{ }33 20[ ] 20[ ] / cos19.1
10[ / ]12
m mkN m
× °= ×
2(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )
12
g OO b l bξ ξ ξρ ⋅ ′′+ ⋅ + × ⋅
56.4341 10 [ ]kN m= × ⋅
23 1 20[ ] 20[ ]10[ / ] 0.13 20[ ]
2 cos19.1 cos19.1m mkN m m + × + × × × ° °
{ }3(2,1) (1,0) (0)3,4 3,4 4( ) ( ) / cos( )
12
l bg
ξ ξ ξρ
⋅ ∆=
2(1,0) (1,0)3,4 3,4(2,1)
3,4(0) (0)4 4
( ) ( )( )
cos( cos(12 ) )
b bg OO l
ξ ξξ
ξ ξρ ⋅
∆ ∆
′′+ ⋅ + × ⋅
(2,1)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×(2,1)3,4
5( ) 4.15 10 [ ]B kNF ξ = ×(2,1)3,4
4( ) 5.54 10 [ ]ExtF kNξ = − ×
(2,1)3,4( ), (0, 1.64,4.36)G ξ = −(2,1)3,4( ) (0, 2.88, 5.63), B ξ − −=(2,1)3,4( ) (0, 9.28, 6.68), g ξ − −=
, ( )OO O O′′ ′′ ′′′=109
/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
G
Section view
(1)3ξ∆O
O′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (49)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
2
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
2
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4
(2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( ) ( ) ( )
( ) ( ) ( )G B T
Ext Ext T
mg z g V z gI
F z g i
ξ ξ ξ ξ
ξ ξ ξ
ρ ρ
ρ
⋅ − ⋅ ⋅ −
− ⋅ + ⋅
6 6
6 5
5
6.3213 10 [ ] 2.3402 10 [ ]1.5701 10 [ ] 3.6994 10 [ ]6.4341 10 [ ]
kN m kN mkN m kN mkN m
= − × ⋅ + × ⋅
+ × ⋅ − × ⋅
+ × ⋅
62.1375 10 [ ]kN m= − × ⋅
110/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
G
Section view
(1)3ξ∆O
O′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (50)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
(2,1)3,4( )G G ξ=
ξ3 : immersionξ4 : heel
2(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4
(2,1) (2,1) (2,1)3,4 3,4 3,4
( ) ( ) ( ) ( )
( ) ( ) ( )G B T
Ext Ext T
mg z g V z gI
F z g i
ξ ξ ξ ξ
ξ ξ ξ
ρ ρ
ρ
⋅ − ⋅ ⋅ −
− ⋅ + ⋅
1 (2,1) 43,4( ) 9.3384 10 [ ]TM kN mξ = × ⋅
62.1375 10 [ ]kN m= − × ⋅
21 3
* ( 2,1)
3,4 3, 4
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4
(2,1) (2,1) (2,1)3,4 3,4 3,4
(1)4
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
T T
G B T
Ext Ext T
M M
mg z g V z gI
F z g i
ξ ξ
ξ ξ ξ ξ
ξ ξ ξ
ξρ ρ
ρ
−=
∆ ⋅ − ⋅ ⋅ − − ⋅ + ⋅
3
4
6
0[ ] 9.3384 10 [ ] 0.0437 rad 2.52.1375 10 [ ]
kN m kN mkN m
⋅ − × ⋅= = − = −
− × ⋅
If we assume that MT(ξ3,4*) =0
(2) (1) (1)4 4 4 19.1 2.5 16.6ξ ξ ξ= + ∆ = ° − ° = °
Static equilibrium? Check!
We want to find *4ξ
( )2*4 4ξ ξ=
? (2,2)3,4( ) 0TM ξ =
?
111/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
gB
v
OG
Section view
(1)3ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (51)
(2,2)3,4( ) (0, 1.44,4.43)G ξ = −
(2,2)3,4( )g ξ =
(2,2)3,4( )B ξ =
1st step, Immersion
1st step, Heel
(1) (1)4 4(1) (1)4 4
1 0 00 cos sin0 sin cos
ξ ξξ ξ
= ∆ − ∆ ∆ ∆
(2,2)3,4(2,2)3,4(2,2)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
(2,1)3,4(2,1)3,4(2,1)3,4
( )
( )
( )
xyz
ξ
ξ
ξ
Transformation G, gto waterplane fixed frame
(2) (1) (1)4 4 4ξ ξ ξ= + ∆
heel
(2,1)3,4
(1) (1) (2,1)4 4 3,4(1) (1) (2,1)4 4 3,4
1 0 0 ( )0 cos sin ( )0 sin cos ( )
G
G
G
xyz
ξξ ξ ξξ ξ ξ
= ∆ − ∆ ∆ ∆
(2,2)3,4(2,2)3,4(2,2)3,4
( )( )( )
G
G
G
xyz
ξξξ
01.44
4.43
= −
For center of gravity of ship G
(1) (1)4 4(1) (1)4 4
1 0 0 00 cos sin 1.640 sin cos 4.36
ξ ξξ ξ
= ∆ − ∆ − ∆ ∆
(1)4, ( 2.5 )ξ∆ = −
(2,1)3,4( )G G ξ=(2,1)3,4( )B B ξ=(2,1)3,4( )g g ξ=
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
(2,2) (2,2) (2,2), 3,4 , 3,4 , 3,4(2,2)
3,4 (2,2) (2,2) (2,2)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )V x V y V zBM M M
V V Vξ ξ ξ
ξξ ξ ξ
=
,V xM :1st moment of volume about x axis in y direction in waterplane fixed frame
For center of Buoyancy , and center of weight of cargo hold is calculated by
(2,2)3,4( )B ξ
(2,2)3,4( )g ξ
(2,2) (2,2) (2,2), 3,4 , 3,4 , 3,4(2,2)
3,4 (2,2) (2,2) (2,2)3,4 3,4 3,4
( ) ( ) ( )( )
( ) ( ) ( )( , , )v x v y v zg
v v v
M M Mξ ξ ξξ
ξ ξ ξ=
,v xM :1st moment of flooded volume about x axis in y direction in waterplane fixed frame
(0, 2.47, 5.52)= − −
(0, 9.40, 6.5)= − −(2,1)3,4( ) (0, 1.64,4.36)G ξ = −(2,1)3,4( ) (0, 2.88, 5.63)B ξ − −=(2,1)3,4( ) (0, 9.28, 6.68)g ξ − −=
Next
in this example, is simply calculated as next page(2,1) (2,1)3,4 3,4( ), ( )B gξ ξ
to calculate (2,2)3,4( )TM ξCalculate (2,2) (2,2) (2,2)
3,4 3,4 3,4( ) ( ), ( ),G B gξ ξ ξ
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
ξ3 : immersionξ4 : heel
112/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (52)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
O(1)
4ξ (1)3ξ∆0.36[ ]m= −
(1)4ξ
(1)4ξ∆
yO′′
B
(2)4ξ
,z z′ ′′
y′O′
y
z
g B
v
OG
Section viewnew frame O''-x''y''z''
G
OO′′
y
z, zz′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(2)4ξ
New frame O''-x''y''z''
(1)3ξ∆
0.36[ ]m−
,z z′ ′′ z
y′′
( , , )O O Ox y z′ ′ ′ (0,0.12,1.34)=,(in previous calculation)
So, Origin of O''-x''y''z'' frame in body fixed frame
Develop equation of line OO′′by point O, and slop .
(2)4tan ( )O Oz z y yξ′ ′ ′ ′− = − ⋅ −
1.34 0.3 ( 0.12)z y′ ′− = − ⋅ −0.3 1.38z y′ ′∴ = − ⋅ +
( , , )O O Ox y z′′ ′′ ′′′ ′ ′ (0,0,1.38)=
(2)4tanξ
(2)4, ( 16.6 )ξ = °
Oz′ Oy′
1.38
9
a : O b : O'' c : c'' d : c''' e : c (2,2)3,4( )B ξ=
a
b
(2)4ξ
113/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (53)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
,z z′ ′′
y′O′
y
z
g B
v
OG
Section view
9
0.37
Calculate centroid of section area in O''-x''y''z'' frame,
A1 414.80 0.00 -5.19 0.00 -2,150.74
A2 59.61 -13.33 1.99 -794.74 118.43
A3 -59.61 13.33 -1.99 -794.74 118.43
Sum 414.80 -1,589.48 -1,913.88
3 3
, ,1 1
3 3
1 1
( , )
,Ai Ai
c c
A y A zi i
Ai Aii i
y z
M M
Area Area
′′ ′′= =
= =
′′ ′′ =
∑ ∑
∑ ∑
, AiA yM ′′ :1st moment of area Ai about x axis in y direction in O''-x''y''z'' frame
, AiA zM ′′ :1st moment of area Ai about y axis in z direction in O''-x''y''z'' frame
( )( , , ) 0, 3.83, 4.61c c cx y z′′ ′′ ′′∴ = − −
iAy′′
, ( 1, 2,3)i =
,( )
AiA yM
′′
iAi AArea y′′×,
( )AiA z
M′′
iAi AArea z′′×
1,589.48 1,913.88,414.8 414.8
− − =
AiArea
Centroid of section area in O''-x''y''z'' frame,
( )3.83, 4.61= − −
iAz′′
A2 A3
A1
(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,2) (2,2)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,2)3,4( )B ξ
<Transverse moment of >(2,2)3,4( )ξ
Center of buoyancy
y′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
a : O b : O'' c : c'' d : c''' e : c (2,2)3,4( )B ξ=
114/120
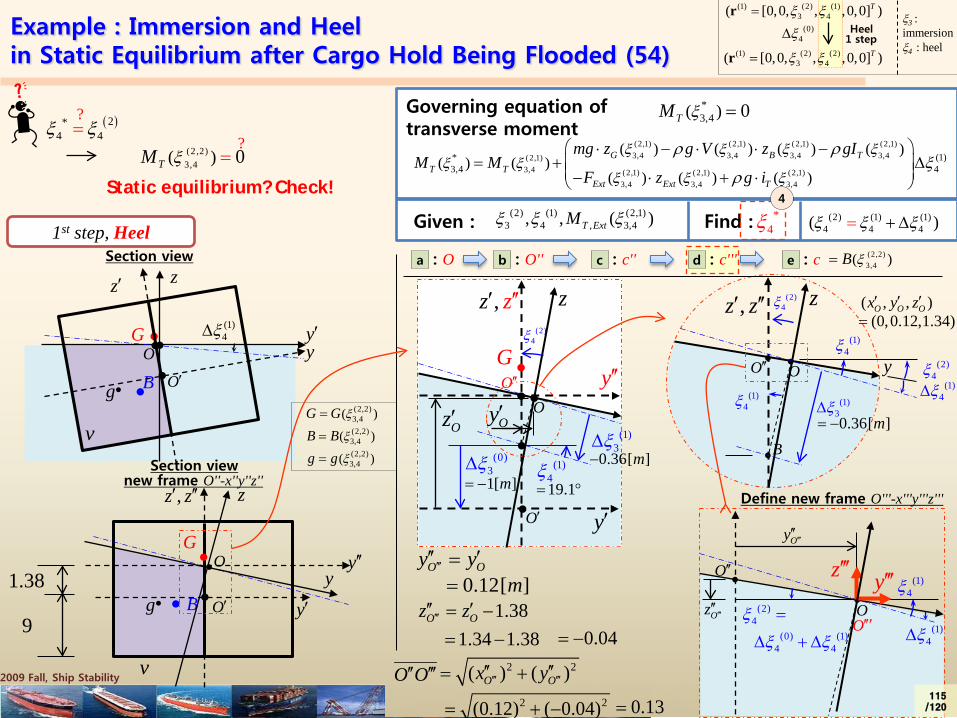
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (54)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
O(1)
4ξ (1)3ξ∆0.36[ ]m= −
(1)4ξ
(1)4ξ∆
yO′′
B
(1)4ξ
(1)4ξ∆
(2)4ξ =
(0) (1)4 4ξ ξ∆ + ∆
,z z′ ′′
y′O′
y
z
g B
v
OG
Section viewnew frame O''-x''y''z''
,z z′ ′′ z
O′′
O
Oy ′′′′′
O Oy y′′′′′ ′=0.12[ ]m=
Oz ′′′′′
Define new frame O'''-x'''y'''z'''
y′′′z′′′
O′′′
y′′
1.38O Oz z′′′′′ ′= −1.34 1.38= − 0.04= −
O O′′ ′′′ 2 2( ) ( )O Ox y′′′ ′′′′′ ′′= +2 2(0.12) ( 0.04)= + − 0.13=
( , , )O O Ox y z′ ′ ′(0,0.12,1.34)=
1.38
9
(2)4ξ
a : O b : O'' c : c'' d : c''' e : c (2,2)3,4( )B ξ=
(2)4ξ
G
OO′′
z, zz′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(1)4ξ19.1= °
(2)4ξ
Oz′ Oy′(1)
3ξ∆0.36[ ]m−
115/120
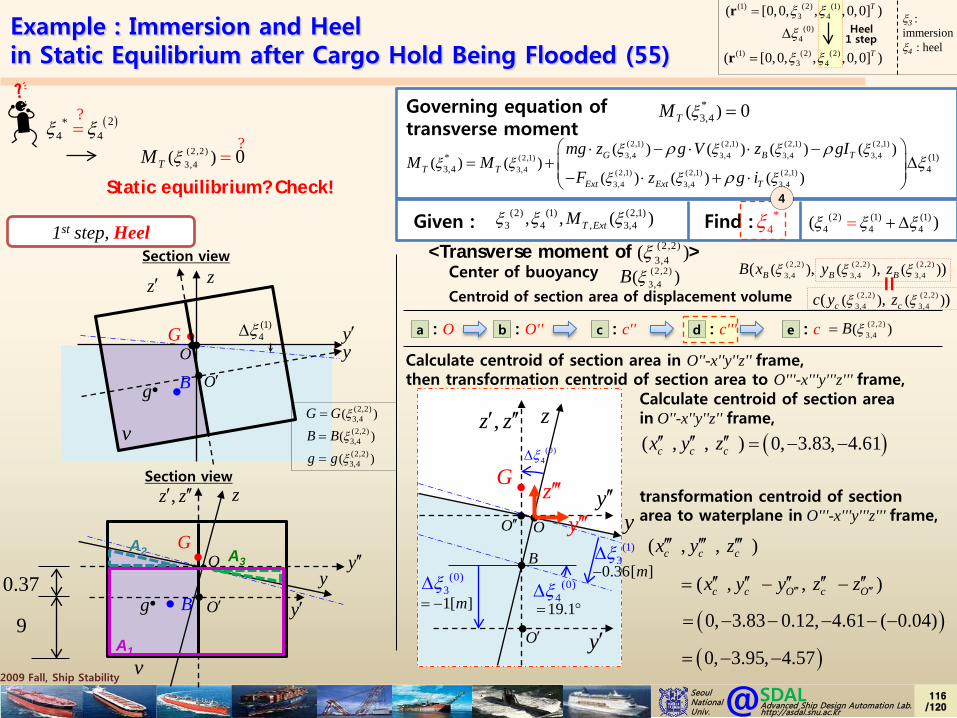
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (55)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
,z z′ ′′
y′O′
y
z
g B
v
OG
Section view
9
0.37
A2 A3
A1
Calculate centroid of section area in O''-x''y''z'' frame,then transformation centroid of section area to O'''-x'''y'''z''' frame,
( )( , , ) 0, 3.83, 4.61c c cx y z′′ ′′ ′′ = − −
Calculate centroid of section areain O''-x''y''z'' frame,
transformation centroid of section area to waterplane in O'''-x'''y'''z''' frame,
( , , )c c cx y z′′′ ′′′ ′′′
( )0, 3.83 0.12, 4.61 ( 0.04)= − − − − −
( , , )c c O c Ox y y z z′′′ ′′′′′ ′′ ′′ ′′ ′′= − −
( )0, 3.95, 4.57= − −
G
OO′′ y
z,z z′ ′′
y′′
y′O′
(0)3ξ∆1[ ]m= −
(0)4ξ∆
19.1= °
(0)4ξ∆
(1)3ξ∆
0.36[ ]m−B
y′′′z′′′
(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,2) (2,2)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,2)3,4( )B ξ
<Transverse moment of >(2,2)3,4( )ξ
Center of buoyancy
y′′
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
a : O b : O'' c : c'' d : c''' e : c (2,2)3,4( )B ξ=
116/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (56)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
,z z′ ′′
y′O′
y
z
g B
v
OG
y′′
Section view
9
0.37
A2 A3
A1
( )( , , ) 0, 3.95, 4.57c c cx y z′′′ ′′′ ′′′∴ = − −
(2,2)3,4(2,2)3,4(2,2)3,4
( )( )( )
c
c
c
xyz
ξ
ξ
ξ
=
(2,2)3,4( ) (0, 2.48, 5.52)B ξ∴ = − −
(2) (2)4 4(2) (2)
4 4
1 0 0 00 cos sin 3.950 sin cos 4.57
ξ ξξ ξ
= − − −
(2) (0) (1)4 4 4, ( 16.6 )ξ ξ ξ= ∆ + ∆ =
Calculate centroid of section area in O'''-x'''y'''z''' frame,
then transformation centroid of section area to waterplane fixed frame.
(2 ,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )c c cx y zξ ξ ξ
02.485.52
= − −
(2) (2)4 4(2) (2)
4 4
1 0 00 cos sin0 sin cos
c
c
c
xyz
ξ ξξ ξ
′′′ ′′′= −
′′′
(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 2.48, 5.52)c c cx y zξ ξ ξ∴ = − −
(2,2)3,4of ξ
(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )B B BB x y zξ ξ ξ
(2,2) (2,2)3,4 3,4( ) ( )( , )c cc y zξ ξCentroid of section area of displacement volume
=(2,2)3,4( )B ξ
<Transverse moment of >(2,2)3,4( )ξ
Center of buoyancy
(2)4ξ
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
a : O b : O'' c : c'' d : c''' e : c (2,2)3,4( )B ξ=
117/120
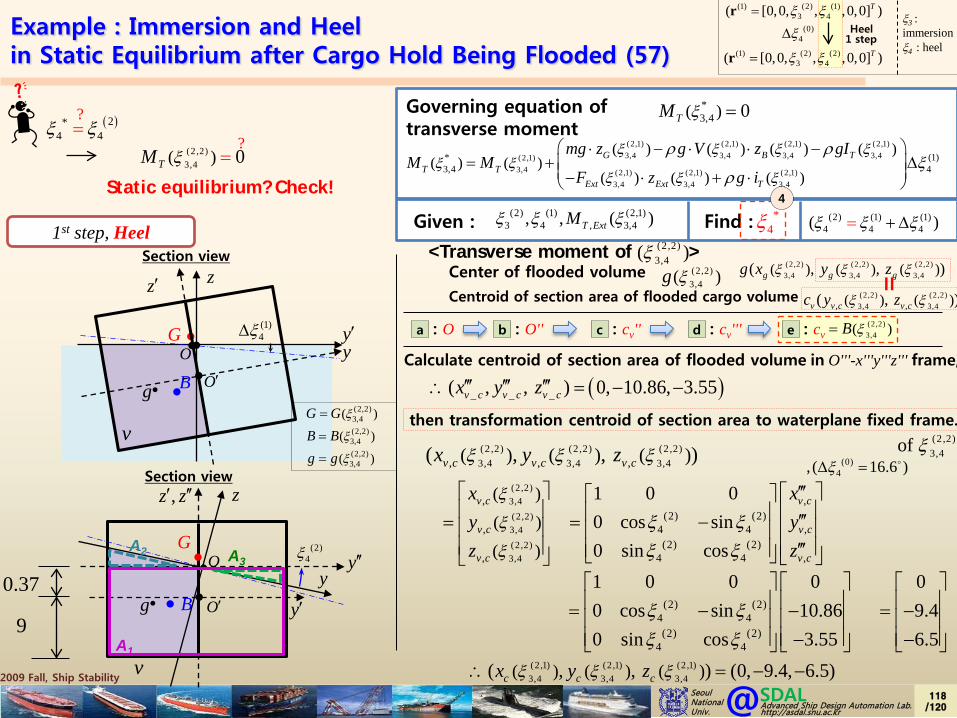
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (57)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
,z z′ ′′
y′O′
y
z
g B
v
OG
y′′
Section view
9
0.37
A2 A3
A1
(2)4ξ
(2,2) (2,2) (2,2)3,4 3,4 3,4( ) ( ) ( )( , , )g g gg x y zξ ξ ξ
(2,2) (2,2)3,4 3,4, ,( ) ( )( , )v v c v cc y zξ ξCentroid of section area of flooded cargo volume
=(2,2)3,4( )g ξ
<Transverse moment of >(2,2)3,4( )ξ
Center of flooded volume
( )_ _ _( , , ) 0, 10.86, 3.55v c v c v cx y z′′′ ′′′ ′′′∴ = − −
(2,2)3,4(2,2)3,4(2,2)3,4
,
,
,
( )( )( )
v c
v c
v c
xyz
ξ
ξ
ξ
=
(2) (2)4 4(2) (2)
4 4
1 0 0 00 cos sin 10.860 sin cos 3.55
ξ ξξ ξ
= − − −
(0)4, ( 16.6 )ξ∆ =
Calculate centroid of section area of flooded volume in O'''-x'''y'''z''' frame,
then transformation centroid of section area to waterplane fixed frame.
(2 ,2) (2,2) (2,2)3,4 3,4 3,4, , ,( ) ( ) ( )( , , )v c v c v cx y zξ ξ ξ
09.46.5
= − −
,(2) (2)
4 4 ,(2) (2)
4 4 ,
1 0 00 cos sin0 sin cos
v c
v c
v c
xyz
ξ ξξ ξ
′′′ ′′′= − ′′′
(2,1) (2,1) (2,1)3,4 3,4 3,4( ) ( ) ( )( , , ) (0, 9.4, 6.5)c c cx y zξ ξ ξ∴ = − −
(2,2)3,4of ξ
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
a : O b : O'' c : cv'' d : cv''' e : cv(2,2)3,4( )B ξ=
118/120
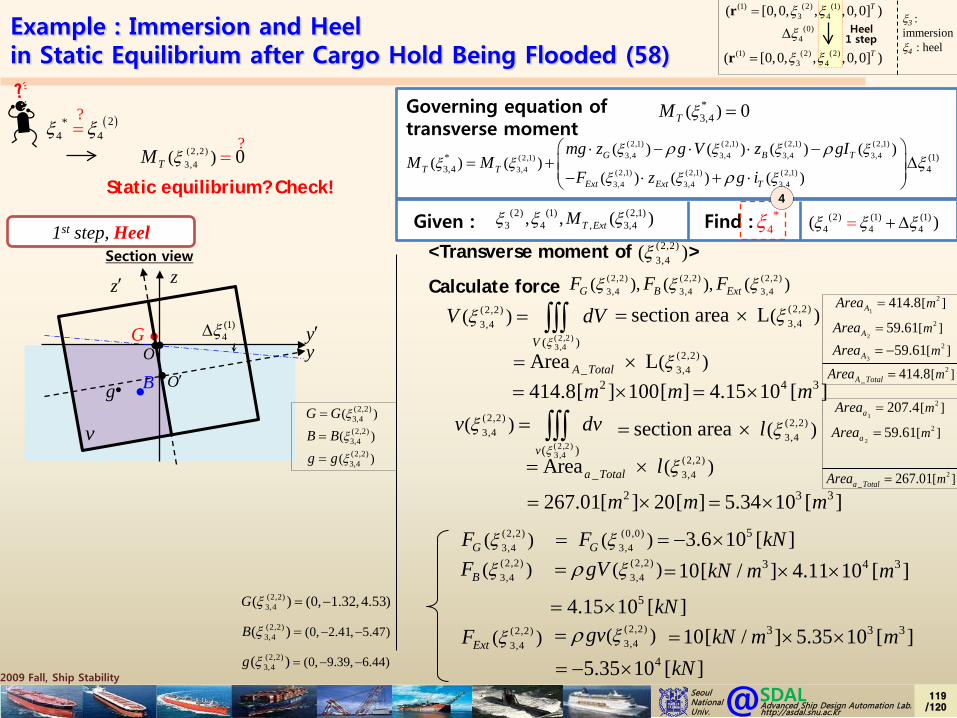
SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (58)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
(2,2)3,4( ) (0, 1.32,4.53)G ξ = −
(2,2)3,4 (0, 2.41, 5.47)( )B ξ − −=
(2,2)3,4 (0, 9.39, 6.44)( )g ξ = − −
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
<Transverse moment of >(2,2)3,4( )ξ
(2,2)3,4( )BF ξ
(2,2)3,4( )GF ξ
(2,2)3,4( )ExtF ξ
45.35 10 [ ]kN= − ×
(0,0)3,4
5( ) 3.6 10 [ ]GF kNξ= = − ×3 4 310[ / ] 4.11 10 [ ]kN m m= × ×(2,2)
3,4( )gV ξρ=54.15 10 [ ]kN= ×
( 2,2)3,4
(2,2)3,4
( )
( )V
V dVξ
ξ = ∫∫∫ (2,2)3,4( )section area L ξ= × 1
2[ ]414.8A mArea =
2
2[ ]59.61A mArea =
3
2[ ]59.61A mArea = −2
_ [ ]414.8A Total mArea =2 4 3414.8[ ] 100[ ] 4.15 10 [ ]m m m= × = ×
(2,2)3,4_ ( )Area LA Total ξ= ×
Calculate force (2,2) (2,2) (2,2)3,4 3,4 3,4( ), ( ), ( )G B ExtF F Fξ ξ ξ
( 2,2)3,4
(2,2)3,4
( )
( )v
v dvξ
ξ = ∫∫∫ (2,2)3,4( )section area l ξ= ×
(2,2)3,4_ ( )Area a Total l ξ= ×
2 3 3267.01[ ] 20[ ] 5.34 10 [ ]m m m= × = ×
3 3 310[ / ] 5.35 10 [ ]kN m m= × ×(2,2)3,4( )gv ξρ=
1
2[ ]207.4a mArea =
2
2[ ]59.61a mArea =
2_ [ ]267.01a Total mArea =
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
119/120

SDAL@Advanced Ship Design Automation Lab.http://asdal.snu.ac.kr
Seoul NationalUniv.
2009 Fall, Ship Stability
z′
y′
O′
y
z
g B
v
OG
Section view
(1)4ξ∆
Example : Immersion and Heel in Static Equilibrium after Cargo Hold Being Flooded (59)
1st step, Heel
(1) (2) (1)3 4( [0,0, , ,0,0] )Tξ ξ=r
(1) (2) (2)3 4( [0,0, , ,0,0] )Tξ ξ=r
Heel(0)4ξ∆ 1 step
Static equilibrium? Check!
( )2*4 4ξ ξ=
?
(2,2)3,4( ) 0TM ξ =
?
ξ3 : immersionξ4 : heel
(2,2)3,4( )G G ξ=(2,2)3,4( )B B ξ=(2,2)3,4( )g g ξ=
<Transverse moment of (ξ3(1),ξ4
(1)) >
(2,2)3,4
(2,2) (2,2)3,4 3,4( ) () )(TB B BM y Fξ ξξ= ⋅
(2,2)3,4
(2,2) (2,2)3,4 3,4( ) () )(TG G GM y Fξ ξξ= ⋅
(2,2) (2,2) (2,2)3,4 3,4 3,4, ( ) ( ) ( )T Ext Ext ExtM y Fξ ξ ξ= ⋅
(2,2)3,4( )TM ξ
(2,2)3,4
5( ) 4.15 10 [ ]B kNF ξ = ×
(2,2)3,4
5( ) 3.6 10 [ ]G NF kξ = − ×
(2,2)3,4
4( ) 5.35 10 [ ]ExtF kNξ = − ×
(2,2)3,4
(2,2)3,4
(2,2)3,4 ,( () )( ) T ExBG tT TM M Mξ ξξ= ++
5( 1.32) ( 3.6 10 )= − ⋅ − ×55.1982 10 [ ]kN m= × ⋅
5( 2.48) (4.15 10 )= − ⋅ ×61.0281 10 [ ]kN m= − × ⋅
(2,2) (2,2)3,4 3,4( ) ( )g Exty Fξ ξ= ⋅
4( 9.4) ( 5.35 10 )= − ⋅ − ×55.0181 10 [ ]kN m= × ⋅
[ ]kN m⋅5 6 55.1982 10 [ ] 1.0281 10 [ ] 5.0181 10kN m kN m= × ⋅ − × ⋅ + ×36.439 10 [ ]kN m= − × ⋅
(2,2)3,4( )TM ξ ε< , 8,000ε ≡
( )2*4 4ξ ξ=
End of iteration
ε : Tolerance
attitude in static equilibrium
( )2*4 4ξ ξ= ( )2*
3 3,ξ ξ=
4
(2,2)3,4( ) (0, 1.32,4.53)G ξ = −
(2,2)3,4 (0, 9.4, 6.5)( )g ξ = − −
(2,2)3,4 (0, 2.48, 5.52)( )B ξ = − −
Given : (2) (1) (2,1)
3 4 , 3,4, , ( )T ExtMξ ξ ξ Find : *4ξ (2) (1) (1)
4 4 4( )ξ ξ ξ+ ∆=
(2,1) (2,1) (2,1) (2,1)3,4 3,4 3,4 3,4(2,1)
3,4 (2,1) (2,1) (2,1)3,4 3,4 3,4
* (1)3,4 4
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( )G B T
T TExt Ext T
mg z g V z gIM M
F z g i
ξ ξ ξ ξξ ξ
ξ ξ ξ
ρ ρξ
ρ
⋅ − ⋅ ⋅ −= + ∆ − ⋅ + ⋅
Governing equation of transverse moment
*3,4( ) 0TM ξ =
4
120/120