Obstacle Sensing Robot Report

of 21
-
Upload
ashutoshsharma -
Category
Documents
-
view
223 -
download
0
Transcript of Obstacle Sensing Robot Report
-
8/9/2019 Obstacle Sensing Robot Report
1/59
A
Project Report
ON
Obstacle Avoidance
Robot
Submitted in the partial fulllment for the award of the deg
in
Bachelor Of Technolog
!N
"lectronics # $ommunication"ngineering
Submitted To
ubmitted B %iss& Shubhi agarwal An'ur$handra
-
8/9/2019 Obstacle Sensing Robot Report
2/59
Anil'umar gangwar
(aurav 'umar )harmendra
'umar B&tech"&$& nal r& )epartment Of "lectronics"ngineering Rajshree group of !nstitution Of %anagement #Technolog
reill&
*+,-.,/
TABLE OF CONTENTS
• INTRODUCTION
• PLATFORM USED
• AIM OF THE PROJECT
• BLOCK DIAGRAM
• WORKING OF THE PROJECT
• CIRCUIT DIAGRAM
• COMPONENT LIST
• CIRCUIT DESCRIPTION
• PCB LAYOUT
-
8/9/2019 Obstacle Sensing Robot Report
3/59
• STEPS FOR MAKING PCB
• PROGRAMMING
• COMPONENTS DESCRIPTION
• APPLICATIONS
• CONCLUSION
• REFERENCE
INTRODUCTION The nature0s most spectacular creation is human brain& The
main feature of the human brain is its abilit to sense the
obstacles and respond according to them& The men alwas want
to transplant his abilit to the articial things so that the can not
onl sense the problem but also respond according to that&
In this com!titi"! co#o#$t! %o#&' !"!#( o#)$ni*$tion %$nts to
im#o"! th! !++ici!nc( $s %!&& $s its #o',cti"it(- To im#o"! th! !++ici!nc( o+
o#)$ni*$tion. $,tom$tion is $ #!+!##!' so&,tion-
Ro/ots h!& $,tom$t! tho,s$n's o+ +$cto#i!s $#o,n' th! %o#&'. m$0in)th! '!&i"!#( o+ m$i&. $c0$)!s $n' m$t!#i$&s +$st $n' !++ici!nt- Sci!ntists $n'
!n)in!!#s h$"! /!!n !1!#im!ntin) %ith sno% &o,)hs $n' !"!n $ss!n)!# c$#s
th$t c$n +o&&o% m$)n!tic &in!s in 2sm$#t3 hi)h%$(s- Th!s! #o/otic "!hic&!s c$n
s!ns! th! #o$'. o/st$c&!s $n' !$ch oth!#. !&imin$tin) t#$++ic sn$#&s $n' m$0in) o,#
-
8/9/2019 Obstacle Sensing Robot Report
4/59
hi)h%$(s s$+!# $n' !$si!# to t#$"!&- Som!'$( %!4&& sim&( t!&& o,# c$#s %h!#! to
t$0! ,s $n' &in! +o&&o%in) ci#c,it#( %i&& h!& )!t ,s th!#! s$+!&( $n' %itho,t !++o#t-
O,# #o5!ct is O/st$c&! s!nsin) #o/ot. this #o5!ct is mic#ocont#o&&!# /$s!'
%! $#! ,sin) $ mic#ocont#o&&!# Atm!)$67 Atm!& Cont#o&&!# ,s!' +o# s!nsin) th!
si)n$&s $n' t$0in) '!cisions $cco#'in) to th$t mic#ocont#o&&!# is ,s!' +o# s!nsin)
th! 'ist$nc! $cco#'in) to "$&,! )i"!n /( 'ist$nc! s!nso#-
PLATFORM USED SOFTWARE REQUIREMENTS
6- B$scom +o# #o)#$mmin) o+ Mic#ocont#o&&!#
8- DIPTRACE +o# Ci#c,it D!si)nin)
9- DIPTRACE +o# PCB '!si)nin)
HARDWARE REQUIREMENTS
6- MICROCONTROLLER Atm!)$67
8- CRYSTAL OSCILLATOR
9- RESISTORS
:- CAPACITORS
;- TRANSISTERS
7- REGULATOR
- WHEELS
6?- BU@@ER
66- OBSTACLE SENSOR
68- BATTERY
69- REMOTE
-
8/9/2019 Obstacle Sensing Robot Report
5/59
6:- TSOP6
-
8/9/2019 Obstacle Sensing Robot Report
6/59
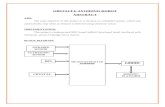
BLOCK DIAGRAM
BLOCK DIAGRAM
DIGITAL VALUE
%!$RO
$ONTRO11"R
Atmega,2
3)"$!S!ON %A4!N(5
S6PP17
S"$T!ON
R"%OT"
ROBOT!$ $ARROBOT!$ $AR
)!STAN$"
S"NSOR
-
8/9/2019 Obstacle Sensing Robot Report
7/59
Working of the projectWORKING OF THE PROJECT
This #o5!ct com#is!s $ mic#ocont#o&&!#- A s!nso# +o# s!nsin) 'ist$nc! is
int!#+$c!' %ith cont#o&&!#. %hi&! mo"in) i+ th!#! is $n( o/st$c&! $##i"!. it %i&& s!n'
$n $n$&o) si)n$& to th! AR cont#o&&!# %hich h$s in/,i&t ADC- It con"!#t th!
$n$&o) si)n$& to 'i)it$& $n' t#$ns+!# it to mic#ocont#o&&!#. it %i&& #oc!ss th! si)n$&
$##i"! $t its in $n' cont#o& th! DC moto# mo"!m!nt- Th! DC moto# #,ns th!
%h!!&s -Th! si)n$& t#$ns+!# th#o,)h $ #!mot! int!#+$c!' %ith AR
mic#ocont#o&&!# -Th! t#$nsmitt!' si)n$& #!c!i"! /( th! #!c!i"!# on #o/otic ,nit- In
this %$( %! c$n m$0! $ #o/ot th$t s!ns!s th! o/st$c&!-
CIRCUIT DIAGRAM
-
8/9/2019 Obstacle Sensing Robot Report
8/59
P C B R O B O T
R O B R F O B
B
1 T h u r s d a y , D e c e m b e r 1 7 , 2 0 0 9
T i t l e
S i e D ! c u m e " t # u m b e r
D a t e % S h e e t
' ( )
) C C
) S S
' ( )
) C C
) C C
) C C
) C C
) C C
) C C
) C C
D 2B * T T '
B * T T 'D +D 2D 1D 0
R C 2R C 1
P + . 0P + . 1 P + . 0 P + . 1
P + . 7
P + . 7R * 0 R * 0
P + . 1 P + . 0
R C 1
R C 2 D T F - D )
# D
R 7
R 2 / 2
R 1 0
R 7 0
R 9
R 7 0
2B D 1 + 9
3 +
R 4 T 0 + 5 6
12+
1B D 1 + 9
R
R 2 / 2
C 1 0C 4 (1 0 8 + )
C C C R1 0 P F
C 9C 4 (1 0 8 + )
3 (
R 4 T 0 + 5 6
12+
R 1 2R1 /
C 1 1 C C R
2 2 P F
C 1 2
C C R 2 2 P F
C 1 +C C R0 1 :
P ; C 1 F 7 2
1
2
+
(
7
9
1 0
1 1
1 2
1 +
1
1 (
1
1 7
1
2 1
2 2
2 +
2
2 (
2
2 7
2 8 C 4 R
R * 0 8 * # 0
R * 1 8 * # 1
R * 2 8 * # 2
R * + 8 * # + 8 ) R F
R * 8 T 0 C / 1
R * ( 8 * # 8 S S
O S C ;
O S C O
R C 0
R C 1
R C 2
R C +
R C
R C (
R C
R C 7
; # T 8 R B 0
R B 1
R B 2
R B +
R B
R B (
R B
R B 7
< += T * 4
>
3 1 0
R 4 T 0 + 5 6
12+
: 24 7 0 ( >
1
2
+
C 1C 4 (
1 0 8 + )
C +
C C R + 9 P F
C 2 C C R
+ 9 P F< 1= T * 4
1 2 >
: 1
9 C 2 0 ( 1
(
1
1 21 +1 1 (1 1 71 1 9
2+79
1 1
= 1
= 2
R S T
P 1 . 0P 1 . 1P 1 . 2P 1 . +P 1 . P 1 . (P 1 . P 1 . 7
P + . 0P + . 1P + . 2P + . +P + . P + . (P + . 7
R 1R1 /
R 1 +R2 / 2
3 9
R 4 T 0 5 6
12+
3
R 4 T 0 5 6
12+
3 7
R 4 T 0 5 6
12+(7
R 1 7R1 /
R 1 R1 /
R 1 (R1 /
R 1 R1 /
3 1
R 4 T 0 + 5 6
12+
B ? 1
B : ? ? R
R 2
R2 2 0
Component lit
-
8/9/2019 Obstacle Sensing Robot Report
9/59
CIRCUIT DESCRIPTION !"
POWE SUPPL! SECTION"
-
8/9/2019 Obstacle Sensing Robot Report
10/59
Conit o#!
6- eg#$%tor" LM
-
8/9/2019 Obstacle Sensing Robot Report
11/59
8- Cr+*t%$ O*ci$$%tor" A c#(st$& osci&&$to# o+ 68 MH* is conn!ct!' $t in no-;.
16 $n' in no-:. 18 to )!n!#$t! th! +#!,!nc( +o# th! =>C8?;6
mic#ocont#o&&!# $n' :MH* is conn!ct!' $t in no-> $n' in no- 6?- Th!
c#(st$& osci&&$to# %o#0s on i!*o!&!ct#ic !++!ct- Th! c&oc0 )!n!#$t!' is ,s!'
to '!t!#min! th! #oc!ssin) s!!' o+ th! cont#o&&!#- T%o c$$cito#s $#! $&so
conn!ct!' on! !n' %ith th! osci&&$to# %hi&! th! oth!# !n' is conn!ct!' %ith
th! )#o,n'- As it is #!comm!n'!' in th! /oo0 to conn!ct t%o c!#$mic
c$$cito# o+ 8? +:?+ to st$/i&i*! th! c&oc0 )!n!#$t!'-
9- e*et *ection" It consists o+ $n #c n!t%o#0 consistin) o+ 6?M9;
c$$cito# $n' on! #!sist$nc! o+ 60- This s!ction is ,s!' to #!s!t th! cont#o&&!#
conn!ct!' $t in no-6 o+ AT=>c8?;6 $n' conn!ct!' $t in no-6 o+ PIC67F
-
8/9/2019 Obstacle Sensing Robot Report
12/59
-
8/9/2019 Obstacle Sensing Robot Report
13/59
STEPS FOR MAKING PCB
-
8/9/2019 Obstacle Sensing Robot Report
14/59
P#!$#! th! &$(o,t o+ th! ci#c,it ositi"!-
• C,t th! hoto+i&m s&i)ht&( /i))!# o+ th! si*! o+ th! &$(o,t-
• P&$c! th! &$(o,t in th! hoto#int!# m$chin! %ith th! hoto+i&m $/o"! it- M$0!
s,#! th$t th! /#omi'! '$#0 si'! o+ th! +i&m is in cont$ct %ith th! &$(o,t-
• S%itch on th! m$chin! /( #!ssin) th! ,sh /,tton +o# ; s!c-
• Di th! +i&m in th! so&,tion #!$#!' '!"!&o!# /( mi1in) th! ch!mic$&s A
B in !,$& ,$ntiti!s in %$t!#-
• No% c&!$n th! +i&m /( &$cin) it in th! t#$( cont$inin) %$t!# +o# 6 min-
• A+t!# this. 'i th! +i&m in th! +i1!# so&,tion +o# 6 min- no% th! n!)$ti"! o+ th!
Ci#c,it is #!$'(-
• No% %$sh it ,n'!# th! +&o%in) %$t!#-
• D#( th! n!)$ti"! in th! hotoc,#! m$chin!-
• T$0! th! PCB /o$#' o+ th! si*! o+ th! &$(o,t $n' c&!$n it %ith st!!& %oo& to
m$0! th! s,#+$c! smooth-
• No% 'i th! PCB in th! &i,i' hoto#!sist. %ith th! h!& o+ 'i co$t m$chin!-
• No% c&i th! PCB n!1t to th! n!)$ti"! in th! hoto c,#! m$chin!. '#(in) +o#
$#o1im$t! 6?68 min,t!-
• No% &$c! th! n!)$ti"! on th! to o+ th! PCB in th! U m$chin!. s!t th! tim!#
+o# $/o,t 8-; min,t! $n' s%itch on th! U &i)ht $t th! to-
• T$0! th! LPR '!"!&o!# in $ cont$in!# $n' #i)o#o,s&( mo"! th! PCB in it-
-
8/9/2019 Obstacle Sensing Robot Report
15/59
• A+t!# this. %$sh it %ith %$t!# "!#( )!nt&(-
• Th!n $&( LPR '(! on it %ith th! h!& o+ $ '#o!# so th$t it is com&!t!&(
co"!#!' /( it-
• No% c&$m th! PCB in th! !tchin) m$chin! th$t cont$ins +!##ic ch&o#i'!
so&,tion +o# $/o,t 6? min,t!s-
• A+t!# !tchin). %$sh th! PCB %ith %$t!#. %i! it $ '#( c&oth so+t&(-
• Fin$&&( #,/ th! PCB %ith $ st!!& %oo&. $n' th! PCB is #!$'(-
-
8/9/2019 Obstacle Sensing Robot Report
16/59
Progr%,,ing of
O%t&'le enin( )o%ot *INCLUDE + P,-F./0INC1 2 PROCESSOR SPECIFIC 3ARIABLE
DEFINITIONS
MAIN
MAINLOOP
L4CJNL DISTANCE50//5GA,
BSF PORTC56
GOTO GM,
GA,!
BCF PORTC56
GM,!
GOTO MAINLOOP
-
8/9/2019 Obstacle Sensing Robot Report
17/59
INTRADC!
MO3F ADRES5W
MO3WF DISTANCE
RETURN
INCLUDE 78'/9:,0m'
%;
-
8/9/2019 Obstacle Sensing Robot Report
18/59
l&,!
JNB p,0:5l&/
CLR p=09
SETBp=0,
CLR %;
-
8/9/2019 Obstacle Sensing Robot Report
19/59
MICROCONTROLLER ATmega16 (AVR Series) 8bit
Mir!!"tr!##er
In our days, there have been many advancement in the field of Electronics and many
cutting edge technologies are being developed every day, but still 8 bit microcontrollers
have its own role in the digital electronics market dominated by 16-3 ! 6" bit digital
devices# $lthough powerful microcontrollers with higher processing capabilities e%ist in the
market, 8bit microcontrollers still hold its value because of their easy-to-understand-
operation, very much high popularity, ability to simplify a digital circuit, low cost compared
to features offered, addition of many new features in a single I& and interest of
manufacturers and consumers#
'oday(s microcontrollers are much different from what it were in the initial stage, and the
number of manufacturers are much more in count than it was a decade or two ago# $t
present some of the ma)or manufacturers are *icrochip +publication I&
microcontrollers., $tmel +publication $/0 microcontrollers., itachi, hillips, *a%im,
2, Intel etc# 4ur interest is upon ATmega16# It belongs to Atmel’s AVR series
micro controller family # 5et(s see the features#
PIN count: $tmega16 has got " pins# 'wo for ower +pin no#1 7v, pin no# 11 ground.,
two for oscillator +pin 1, 13., one for reset +pin 9., three for providing necessary power and
reference voltage to its internal $:&, and 3 +";8. I
-
8/9/2019 Obstacle Sensing Robot Report
20/59
Cerial eripheral Interface
$tmega16 pin diagram
Analog comparator: 4n-chip analog comparator is available# $n interrupt is assigned for
different comparison result obtained from the inputs#
"#ternal Interrupt: 3E%ternal interrupt is accepted# Interrupt sense is configurable#
-
8/9/2019 Obstacle Sensing Robot Report
21/59
$emory: It has ,2 Dbytes of In-Cystem Celf-programmable >lash program memory, 1"
ytes EE04*, Dbytes Internal C0$*# Aritelash < 1,
EE04*#
!loc%: It can run at a freFuency from 1 to 16 *G# >reFuency can be obtained from
e%ternal @uartG &rystal, &eramic crystal or an 0-& network# Internal calibrated 0& oscillator
can also be used#
$ore &eatures Bp to 16 *IC throughput at 16*G# *ost of the instruction e%ecutes ina single cycle# 'wo cycle on-chip multiplication# 3 ; 8 =eneral urpose Aorking 0egisters
ebug: H'$= boundary scan facilitates on chip debug#
Programming: $tmega16 can be programmed either by In-Cystem rogramming via
Cerial peripheral interface or by arallel programming# rogramming via H'$= interface is
also possible# rogrammer must ensure that CI programming and H'$= are not be
disabled using fuse bits if the programming is supposed to be done using CI or H'$=#
http://www.circuitstoday.com/atmega32-avr-microcontroller-an-introductionhttp://www.circuitstoday.com/atmega32-avr-microcontroller-an-introductionhttp://www.circuitstoday.com/atmega32-avr-microcontroller-an-introduction
-
8/9/2019 Obstacle Sensing Robot Report
22/59
http://www.circuitstoday.com/wp-content/uploads/2012/01/Block-Diagram-ATmega32AVR-8-bit-Microcontroller.jpg
-
8/9/2019 Obstacle Sensing Robot Report
23/59
COMPONENTS DESCRIPTION
Dista"e SENSOR$
DESCRI%TION$
Th! LTM>< s!#i!s $#! mini$t,#i*!' #!c!i"!#s +o# in+#$#!' #!mot! cont#o& s(st!ms-
It is $ sin)&! ,nit t(! mo',&! %hich inco#o#$t!s $ PIN 'io'! $n' $ #!c!i"in)
#!$m&i+i!# IC- Th! '!mo',&$t!' o,t,t si)n$& c$n 'i#!ct&( /! '!co'!' /( $mic#o#oc!sso#- It h$s !1c!&&!nt s!nsiti"it( $n' #!&i$/&! +,nction !"!n in 'ist,#/!'
%o#0in) !n"i#onm!nt-
-
8/9/2019 Obstacle Sensing Robot Report
24/59
-
8/9/2019 Obstacle Sensing Robot Report
25/59
V!#tage Regat!rs
-
8/9/2019 Obstacle Sensing Robot Report
26/59
A '!#tage regat!r is an electrical regulator designed to
automaticall maintain a constant voltage level& !t ma use an
electromechanical mechanism8 or passive or active electronic
components& )epending on the design8 it ma be used to regulate
one or more A$ or )$ voltages& 9ith the e:ception of shuntregulators8 all voltage regulators operate b comparing the actual
output voltage to some internal :ed reference voltage& An
di;erence is amplied and used to control the regulation element&
This forms a negative feedbac' servo control loop& !f the output
voltage is too low8 the regulation element is commanded to
produce a higher voltage&
-
8/9/2019 Obstacle Sensing Robot Report
27/59
with e:ternal components to obtain adjustable voltages and
currents&
0ig&re 18$ I"ter"a# b#!3 Diagram
-
8/9/2019 Obstacle Sensing Robot Report
28/59
0ig&re 14 $ 0ie2 O&t5&t Regat!r
0eat&res
C Output $urrent up to ,A
C Output Doltages of /8 28 ?8 E8 ,+8 ,*8 ,/8 ,?8 *-D
C Thermal Overload Protection
C Short $ircuit Protection
C Output Transistor Safe Operating Area Protection
-
8/9/2019 Obstacle Sensing Robot Report
29/59
DC &OTO
A DC ,otor is $n !&!ct#ic moto# th$t #,ns on 'i#!ct c,##!nt DC !&!ct#icit(-
Br#*he-
Th! /#,sh!' DC moto# )!n!#$t!s to#,! 'i#!ct&( +#om DC o%!# s,&i!' to th!moto# /( ,sin) int!#n$& comm,t$tion. st$tion$#( !#m$n!nt m$)n!ts. $n' #ot$tin)
!&!ct#ic$& m$)n!ts-It %o#0s on th! #inci&! o+ Lo#!nt* +o#c! . %hich st$t!s th$t $n(
c,##!nt c$##(in) con',cto# &$c!' %ithin $n !1t!#n$& m$)n!tic +i!&' !1!#i!nc!s $
to#,! o# +o#c! 0no%n $s Lo#!nt* +o#c!- A'"$nt$)!s o+ $ /#,sh!' DC moto#
inc&,'! &o% initi$& cost. hi)h #!&i$/i&it(. $n' sim&! cont#o& o+ moto# s!!'-
Dis$'"$nt$)!s $#! hi)h m$int!n$nc! $n' &o% &i+!s$n +o# hi)h int!nsit( ,s!s-
M$int!n$nc! in"o&"!s #!),&$#&( #!&$cin) th! /#,sh!s $n' s#in)s %hich c$##( th!
!&!ct#ic c,##!nt. $s %!&& $s c&!$nin) o# #!&$cin) th! comm,t$to# - Th!s!
comon!nts $#! n!c!ss$#( +o# t#$ns+!##in) !&!ct#ic$& o%!# +#om o,tsi'! th! moto#
to th! sinnin) %i#! %in'in)s o+ th! #oto# insi'! th! moto#-
S+nchrono#*
S(nch#ono,s DC moto#s. s,ch $s th! /#,sh&!ss DC moto# $n' th! st!!# moto# .
#!,i#! !1t!#n$& comm,t$tion to )!n!#$t! to#,!- Th!( &oc0 , i+ '#i"!n 'i#!ct&( /(
DC o%!#- Ho%!"!#. BLDC moto#s $#! mo#! simi&$# to $ s(nch#ono,s $c moto#-
Br#*h$e**
B#,sh&!ss DC moto#s ,s! $ #ot$tin) !#m$n!nt m$)n!t in th! #oto#. $n' st$tion$#(
!&!ct#ic$& m$)n!ts on th! moto# ho,sin)- A moto# cont#o&&!# con"!#ts DC to AC-
This '!si)n is sim&!# th$n th$t o+ /#,sh!' moto#s /!c$,s! it !&imin$t!s th!
com&ic$tion o+ t#$ns+!##in) o%!# +#om o,tsi'! th! moto# to th! sinnin) #oto#-
A'"$nt$)!s o+ /#,sh&!ss moto#s inc&,'! &on) &i+! s$n. &itt&! o# no m$int!n$nc!.
$n' hi)h !++ici!nc(- Dis$'"$nt$)!s inc&,'! hi)h initi$& cost. $n' mo#! com&ic$t!'
moto# s!!' cont#o&&!#s-
http://en.wikipedia.org/wiki/Electric_motorhttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Brushed_DC_Electric_Motorhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Electric_motorhttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Brushed_DC_Electric_Motorhttp://en.wikipedia.org/wiki/Commutator_(electric)http://en.wikipedia.org/wiki/Brushless_DC_electric_motorhttp://en.wikipedia.org/wiki/Stepper_motorhttp://en.wikipedia.org/wiki/Alternating_current
-
8/9/2019 Obstacle Sensing Robot Report
30/59
DC MOTOR:
!n $n( !&!ct#ic moto#. o!#$tion is /$s!' on sim&! !&!ct#om$)n!tism- A
c,##!ntc$##(in) con',cto# )!n!#$t!s $ m$)n!tic +i!&' %h!n this is th!n &$c!' in
$n !1t!#n$& m$)n!tic +i!&'. it %i&& !1!#i!nc! $ +o#c! #oo#tion$& to th! c,##!nt in
th! con',cto#. $n' to th! st#!n)th o+ th! !1t!#n$& m$)n!tic +i!&'- As (o, $#! %!&&
$%$#! o+ +#om &$(in) %ith m$)n!ts $s $ 0i'. oosit! No#th $n' So,th o&$#iti!s
$tt#$ct. %hi&! &i0! o&$#iti!s No#th $n' No#th. So,th $n' So,th #!!&- Th! int!#n$&
con+i),#$tion o+ $ DC moto# is '!si)n!' to h$#n!ss th! m$)n!tic int!#$ction
/!t%!!n $ c,##!ntc$##(in) con',cto# $n' $n !1t!#n$& m$)n!tic +i!&' to )!n!#$t!
#ot$tion$& motion-
http://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/dc.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/dc.htmlhttp://encyclobeamia.solarbotics.net/articles/current.html
-
8/9/2019 Obstacle Sensing Robot Report
31/59
E"!#( DC moto# h$s si1 /$sic $#ts $1&!. #oto# $-0-$-. $#m$t,#!. st$to#.
comm,t$to#. +i!&' m$)n!ts. $n' /#,sh!s- In most common DC moto#s $n' $&&
th$t BEAM!#s %i&& s!!. th! !1t!#n$& m$)n!tic +i!&' is #o',c!' /( hi)hst#!n)th
!#m$n!nt m$)n!ts6- Th! st$to# is th! st$tion$#( $#t o+ th! moto# this inc&,'!s
th! moto# c$sin). $s %!&& $s t%o o# mo#! !#m$n!nt m$)n!t o&! i!c!s- Th! #oto#
to)!th!# %ith th! $1&! $n' $tt$ch!' comm,t$to# #ot$t! %ith #!s!ct to th! st$to#-
Th! #oto# consists o+ %in'in)s )!n!#$&&( on $ co#!. th! %in'in)s /!in)
!&!ct#ic$&&( conn!ct!' to th! comm,t$to#- Th! $/o"! 'i$)#$m sho%s $ common
moto# &$(o,t %ith th! #oto# insi'! th! st$to# +i!&' m$)n!ts-
Th! )!om!t#( o+ th! /#,sh!s. comm,t$to# cont$cts. $n' #oto# %in'in)s $#! s,chth$t %h!n o%!# is $&i!'. th! o&$#iti!s o+ th! !n!#)i*!' %in'in) $n' th! st$to#
m$)n!ts $#! mis$&i)n!'. $n' th! #oto# %i&& #ot$t! ,nti& it is $&most $&i)n!' %ith th!
st$to#s +i!&' m$)n!ts- As th! #oto# #!$ch!s $&i)nm!nt. th! /#,sh!s mo"! to th! n!1t
comm,t$to# cont$cts. $n' !n!#)i*! th! n!1t %in'in)- Gi"!n o,# !1$m&! t%oo&!
moto#. th! #ot$tion #!"!#s!s th! 'i#!ction o+ c,##!nt th#o,)h th! #oto# %in'in).
&!$'in) to $ +&i o+ th! #oto#s m$)n!tic +i!&'. '#i"in) it to contin,! #ot$tin)-
In #!$& &i+!. tho,)h. DC moto#s %i&& $&%$(s h$"! mo#! th$n t%o o&!s th#!! is $
"!#( common n,m/!#- In $#tic,&$#. this $"oi's '!$' sots in th! comm,t$to#-
Yo, c$n im$)in! ho% %ith o,# !1$m&! t%oo&! moto#. i+ th! #oto# is !1$ct&( $t th!
mi''&! o+ its #ot$tion !#+!ct&( $&i)n!' %ith th! +i!&' m$)n!ts. it %i&& )!t st,c0
http://encyclobeamia.solarbotics.net/articles/dc.htmlhttp://encyclobeamia.solarbotics.net/articles/beam.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/dc.htmlhttp://encyclobeamia.solarbotics.net/articles/dc.htmlhttp://encyclobeamia.solarbotics.net/articles/beam.htmlhttp://encyclobeamia.solarbotics.net/articles/current.htmlhttp://encyclobeamia.solarbotics.net/articles/dc.html
-
8/9/2019 Obstacle Sensing Robot Report
32/59
th!#!- M!$n%hi&!. %ith $ t%oo&! moto#. th!#! is $ mom!nt %h!#! th! comm,t$to#
sho#ts o,t th! o%!# s,&( i-!-. /oth /#,sh!s to,ch /oth comm,t$to# cont$cts
sim,&t$n!o,s&(- This %o,&' /! /$' +o# th! o%!# s,&(. %$st! !n!#)(. $n'
'$m$)! moto# comon!nts $s %!&&- Y!t $noth!# 'is$'"$nt$)! o+ s,ch $ sim&!
moto# is th$t it %o,&' !1hi/it $ hi)h $mo,nt o+ to#,! #i&! th! $mo,nt o+
to#,! it co,&' #o',c! is c(c&ic %ith th! osition o+ th! #oto#-
Cr+*t%$ O*ci$$%tor
It is o+t!n #!,i#!' to #o',c! $ si)n$& %hos! +#!,!nc( o# ,&s! #$t! is "!#( st$/&!
$n' !1$ct&( 0no%n- This is imo#t$nt in $n( $&ic$tion %h!#! $n(thin) to 'o %ith
tim! o# !1$ct m!$s,#!m!nt is c#,ci$&- It is #!&$ti"!&( sim&! to m$0! $n osci&&$to#
th$t #o',c!s som! so#t o+ $ si)n$&. /,t $noth!# m$tt!# to #o',c! on! o+ #!&$ti"!&(
#!cis! +#!,!nc( $n' st$/i&it(- AM #$'io st$tions m,st h$"! $ c$##i!# +#!,!nc(
$cc,#$t! %ithin 6?H* o+ its $ssi)n!' +#!,!nc(. %hich m$( /! +#om ;9? to 6
-
8/9/2019 Obstacle Sensing Robot Report
33/59
mi&&ion %i&& #!s,&t in $n !##o# o+ s&i)ht&( &!ss th$n on! h$&+ s!con' $ '$(. %hich
%o,&' /! $/o,t 9 min,t!s $ (!$#- This mi)ht not so,n' &i0! m,ch. /,t $n !##o# o+
6? $#ts !# mi&&ion %o,&' #!s,&t in $n !##o# o+ $/o,t $ h$&+ $n ho,# !# (!$#- A
c&oc0 s,ch $s this %o,&' n!!' #!s!ttin) $/o,t onc! $ month. $n' mo#! o+t!n i+ (o,
$#! th! ,nct,$& t(!- A #o)#$mm!' CR %ith $ c&oc0 this +$# o++ co,&' miss th!
#!co#'in) o+ $#t o+ $ T sho%- N$##o% /$n' SSB comm,nic$tions $t HF $n'
UHF +#!,!nci!s sti&& n!!' ;? H* +#!,!nc( $cc,#$c(- At ::? MH*. this is s&i)ht&(
mo#! th$n ?-6 $#t !# mi&&ion- O#'in$#( LC osci&&$to#s ,sin) con"!ntion$&
in',cto#s $n' c$$cito#s c$n $chi!"! t(ic$&&( ?-?6 to ?-6 !#c!nt +#!,!nc(
st$/i&it(. $/o,t 6?? to 6??? H* $t 6 MH*- This is OK +o# AM $n' FM /#o$'c$st
#!c!i"!# $&ic$tions $n' in oth!# &o%!n' $n$&o) #!c!i"!#s not #!,i#in) hi)h
t,nin) $cc,#$c(- B( c$#!+,& '!si)n $n' comon!nt s!&!ction. $n' %ith #,))!'
m!ch$nic$& const#,ction. -?6 to ?-??6. o# !"!n /!tt!# -???; st$/i&it( c$n /!
$chi!"!'- Th! /!tt!# +i),#!s %i&& ,n'o,/t!'&( !m&o( t!m!#$t,#! com!ns$tion
comon!nts $n' #!),&$t!' o%!# s,&i!s. to)!th!# %ith !n"i#onm!nt$& cont#o&
)oo' "!nti&$tion $n' $m/i!nt t!m!#$t,#! #!),&$tion $n' 2/$tt&!shi3 m!ch$nic$&
const#,ction- This h$s /!!n 'on! in som! comm,nic$tions #!c!i"!#s ,s!' /( th!
mi&it$#( $n' comm!#ci$& HF comm,nic$tion #!c!i"!#s /,i&t in th! 6>;?6>7; !#$. /!+o#! th! %i'!s#!$' ,s! o+ 'i)it$& +#!,!nc( s(nth!sis- B,t th!s! #!c!i"!#s %!#!
!1t#!m!&( !1!nsi"!. &$#)!. $n' h!$"(- M$n( mo'!#n cons,m!# )#$'! AM. FM.
$n' sho#t%$"! #!c!i"!#s !m&o(in) c#(st$& cont#o&&!' 'i)it$& +#!,!nc( s(nth!sis
%i&& 'o $s %!&& o# /!tt!# +#om $ +#!,!nc( st$/i&it( st$n'oint-
An osci&&$to# is /$sic$&&( $n $m&i+i!# $n' $ +#!,!nc( s!&!cti"! +!!'/$c0 n!t%o#0
Fi) 6- Wh!n. $t $ $#tic,&$# +#!,!nc(. th! &oo )$in is ,nit( o# mo#!. $n' th!
tot$& h$s!shi+t $t this +#!,!nc( is *!#o. o# som! m,&ti&! o+ 97? '!)#!!s. th!
con'ition +o# osci&&$tion is s$tis+i!'. $n' th! ci#c,it %i&& #o',c! $ !#io'ic
%$"!+o#m o+ this +#!,!nc(- This is ,s,$&&( $ sin! %$"!. o# s,$#! %$"!. /,t
t#i$n)&!s. im,&s!s. o# oth!# %$"!+o#ms c$n /! #o',c!'- In +$ct. s!"!#$& 'i++!#!nt
-
8/9/2019 Obstacle Sensing Robot Report
34/59
%$"!+o#ms o+t!n $#! sim,&t$n!o,s&( #o',c!' /( th! s$m! ci#c,it. $t 'i++!#!nt
oints- It is $&so ossi/&! to h$"! s!"!#$& +#!,!nci!s #o',c!' $s %!&&. $&tho,)h
this is )!n!#$&&( ,n'!si#$/&!-
E.TA /NOWLEDGE
S!nsin) Unit
S!nsin) ,nit consists o+ RF s!nso#s %h!n!"!# this s!nso# #!c!i"! RF si)n$&
th!( $ss in+o#m$tion in th! +o#m o+ hi)h o# &o% to th! cont#o&&!#- Wh!n!"!# $ 0!( is #!ss!' in $ 'ist$nt RF t#$nsmitt!# th$t 0!( is s!ns!' /( th! s!nso#
$n' +,#th!# in+o#m cont#o&&!# $/o,t th! 0!( #!ss!' $n' +,#th!# $ction c$n /!
!#+o#m!'-
Ra2i! re7&e" Reei'er
-
8/9/2019 Obstacle Sensing Robot Report
35/59
Tra"smitter
%-io fre0#enc+ F is $ +#!,!nc( o# #$t! o+ osci&&$tion %ithin th! #$n)! o+
$/o,t 9 H* to 9?? GH*- This #$n)! co##!son's to +#!,!nc( o+ $&t!#n$tin) c,##!nt
!&!ct#ic$& si)n$&s ,s!' to #o',c! $n' '!t!ct #$'io %$"!s- Sinc! most o+ this #$n)!
is /!(on' th! "i/#$tion #$t! th$t most m!ch$nic$& s(st!ms c$n #!son' to. RF
,s,$&&( #!+!#s to osci&&$tions in !&!ct#ic$& ci#c,its-
Speci%$ propertie* of F e$ectric%$ *ign%$*
E&!ct#ic$& c,##!nts th$t osci&&$t! $t RF h$"! s!ci$& #o!#ti!s not sh$#!' /( 'i#!ct
c,##!nt si)n$&s- On! s,ch #o!#t( is th! !$s! %ith %hich th!( c$n ioni*! $i# to
c#!$t! $ con',cti"! $th th#o,)h $i#- This #o!#t( is !1&oit!' /( hi)h +#!,!nc(
,nits ,s!' in !&!ct#ic $#c %!&'in). $&tho,)h st#ict&( s!$0in) th!s! m$chin!s 'o not
t(ic$&&( !m&o( +#!,!nci!s %ithin th! HF /$n'- Anoth!# s!ci$& #o!#t( is $n
!&!ct#om$)n!tic +o#c! th$t '#i"!s th! RF c,##!nt to th! s,#+$c! o+ con',cto#s.
0no%n $s th! s0in !++!ct- Anoth!# #o!#t( is th! $/i&it( to $!$# to +&o% th#o,)h
$ths th$t cont$in ins,&$tin) m$t!#i$&. &i0! th! 'i!&!ct#ic ins,&$to# o+ $ c$$cito#-
Th! '!)#!! o+ !++!ct o+ th!s! #o!#ti!s '!!n's on th! +#!,!nc( o+ th! si)n$&s-
http://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Oscillationhttp://en.wikipedia.org/wiki/Hzhttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Electrical_signalhttp://en.wikipedia.org/wiki/Radio_waveshttp://en.wikipedia.org/wiki/Electrical_circuithttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Arc_weldinghttp://en.wikipedia.org/wiki/Skin_effecthttp://en.wikipedia.org/wiki/Dielectrichttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Oscillationhttp://en.wikipedia.org/wiki/Hzhttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Electrical_signalhttp://en.wikipedia.org/wiki/Radio_waveshttp://en.wikipedia.org/wiki/Electrical_circuithttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Arc_weldinghttp://en.wikipedia.org/wiki/Skin_effecthttp://en.wikipedia.org/wiki/Dielectric
-
8/9/2019 Obstacle Sensing Robot Report
36/59
0re7&e"ies
NameSmb!# 0re7&e"
9a'e#e"gt
:A55#iati!"s
":tremel
low
freuenc
"1< FGF+ HI ,+8+++G
,++8+++ 'm
)irectl audible when
converted to sound8
communication with
submarines
Super
low
freuenc
S1< F+GF++ HI ,8+++G
,+8+++ 'm
)irectl audible when
converted to sound8 A$
power grids 3/+G2+ HI5
6ltra lowfreuenc
61< F++G
F+++ HI
,++G
,8+++ 'm
)irectl audible when
converted to sound8
communication with
mines
Der low
freuenc
D1< FGF+ 'HI ,+G,++ 'm
)irectl audible when
converted to sound
3below ca& *+ 'HI= or
ultrasound otherwise5
1owfreuenc
1< F+G
F++ 'HI ,G,+ 'm
A% broadcasting8navigational beacons8
low
-
8/9/2019 Obstacle Sensing Robot Report
37/59
freuenc
F++ %HI
amateur radio8
broadcast television8
aviation8 (PR8 %R!
6ltrahigh
freuenc
6H< F++G
F+++ %HI ,+G,++ cm
Broadcast television8
amateur radio8 mobile
telephones8 cordlesstelephones8 wireless
networ'ing8 remote
'eless entr for
automobiles8
microwave ovens8 (PR
Super
high
freuenc
SH< FGF+ (HI ,G,+ cm
9ireless networ'ing8
satellite lin's8
microwave lin's8satellite television8 door
openers
":tremel
high
freuenc
"H< F+G
F++ (HI ,G,+ mm
%icrowave data lin's8
radio astronom8
remote sensing8
advanced weapons
sstems8 advanced
securit scanning
FEATUES
Wi'! o!#$tin) "o&t$)! #$n)! CC6-;Q;-?
Lo% st$n'/( c,##!nt
A,to o%!# o++ +,nction +o# T8B
F!% !1t!#n$& comon!nts $#! n!!'!'
http://en.wikipedia.org/wiki/Very_high_frequencyhttp://en.wikipedia.org/wiki/Very_high_frequencyhttp://en.wikipedia.org/wiki/Amateur_radiohttp://en.wikipedia.org/wiki/Broadcast_televisionhttp://en.wikipedia.org/wiki/Airbandhttp://en.wikipedia.org/wiki/Ground-penetrating_radarhttp://en.wikipedia.org/wiki/MRIhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Amateur_radiohttp://en.wikipedia.org/wiki/Mobile_telephoneshttp://en.wikipedia.org/wiki/Mobile_telephoneshttp://en.wikipedia.org/wiki/Cordless_telephoneshttp://en.wikipedia.org/wiki/Cordless_telephoneshttp://en.wikipedia.org/wiki/Wireless_networkhttp://en.wikipedia.org/wiki/Wireless_networkhttp://en.wikipedia.org/wiki/Remote_keyless_entryhttp://en.wikipedia.org/wiki/Remote_keyless_entryhttp://en.wikipedia.org/wiki/Microwave_ovenhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Microwavehttp://en.wikipedia.org/wiki/Radio_astronomyhttp://en.wikipedia.org/wiki/Remote_sensinghttp://en.wikipedia.org/wiki/Security_scanhttp://en.wikipedia.org/wiki/Very_high_frequencyhttp://en.wikipedia.org/wiki/Very_high_frequencyhttp://en.wikipedia.org/wiki/Amateur_radiohttp://en.wikipedia.org/wiki/Broadcast_televisionhttp://en.wikipedia.org/wiki/Airbandhttp://en.wikipedia.org/wiki/Ground-penetrating_radarhttp://en.wikipedia.org/wiki/MRIhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Ultra_high_frequencyhttp://en.wikipedia.org/wiki/Amateur_radiohttp://en.wikipedia.org/wiki/Mobile_telephoneshttp://en.wikipedia.org/wiki/Mobile_telephoneshttp://en.wikipedia.org/wiki/Cordless_telephoneshttp://en.wikipedia.org/wiki/Cordless_telephoneshttp://en.wikipedia.org/wiki/Wireless_networkhttp://en.wikipedia.org/wiki/Wireless_networkhttp://en.wikipedia.org/wiki/Remote_keyless_entryhttp://en.wikipedia.org/wiki/Remote_keyless_entryhttp://en.wikipedia.org/wiki/Microwave_ovenhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Super_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Extremely_high_frequencyhttp://en.wikipedia.org/wiki/Microwavehttp://en.wikipedia.org/wiki/Radio_astronomyhttp://en.wikipedia.org/wiki/Remote_sensinghttp://en.wikipedia.org/wiki/Security_scan
-
8/9/2019 Obstacle Sensing Robot Report
38/59
CAPACITO
A c%p%citor o# con-en*er is $ $ssi"! !&!ct#onic comon!nt consistin) o+ $ $i# o+
con',cto#s s!$#$t!' /( $ 'i!&!ct#ic ins,&$to#- Wh!n $ ot!nti$& 'i++!#!nc!
"o&t$)! !1ists $c#oss th! con',cto#s. $n !&!ct#ic +i!&' is #!s!nt in th! 'i!&!ct#ic-
This +i!&' sto#!s !n!#)( $n' #o',c!s $ m!ch$nic$& +o#c! /!t%!!n th! con',cto#s-
Th! !++!ct is )#!$t!st %h!n th!#! is $ n$##o% s!$#$tion /!t%!!n &$#)! $#!$s o+
con',cto# h!nc! c$$cito# con',cto#s $#! o+t!n c$&&!' &$t!s-
An i'!$& c$$cito# is ch$#$ct!#i*!' /( $ sin)&! const$nt "$&,!. c$$cit$nc!. %hich
is m!$s,#!' in +$#$'s- This is th! #$tio o+ th! !&!ct#ic ch$#)! on !$ch con',cto# to
th! ot!nti$& 'i++!#!nc! /!t%!!n th!m- In #$ctic!. th! 'i!&!ct#ic /!t%!!n th! &$t!s
$ss!s $ sm$&& $mo,nt o+ &!$0$)! c,##!nt- Th! con',cto#s $n' &!$'s int#o',c! $n
!,i"$&!nt s!#i!s #!sist$nc! $n' th! 'i!&!ct#ic h$s $n !&!ct#ic +i!&' st#!n)th &imit
#!s,&tin) in $ /#!$0'o%n "o&t$)!-
C$$cito#s $#! %i'!&( ,s!' in !&!ct#onic ci#c,its to /&oc0 th! +&o% o+ 'i#!ct c,##!nt
%hi&! $&&o%in) $&t!#n$tin) c,##!nt to $ss. to +i&t!# o,t int!#+!#!nc!. to smooth th!
o,t,t o+ o%!# s,&i!s. $n' +o# m$n( oth!# ,#os!s- Th!( $#! ,s!' in #!son$nt
ci#c,its in #$'io +#!,!nc( !,im!nt to s!&!ct $#tic,&$# +#!,!nci!s +#om $ si)n$&
%ith m$n( +#!,!nci!s-
http://en.wikipedia.org/wiki/Passivity_(engineering)http://en.wikipedia.org/wiki/Electronic_componenthttp://en.wikipedia.org/wiki/Electrical_conductorhttp://en.wikipedia.org/wiki/Dielectrichttp://en.wikipedia.org/wiki/Potential_differencehttp://en.wikipedia.org/wiki/Electric_fieldhttp://en.wikipedia.org/wiki/Energyhttp://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Faradhttp://en.wikipedia.org/wiki/Electric_chargehttp://en.wikipedia.org/wiki/Leakage_(electronics)http://en.wikipedia.org/wiki/Lead_(electronics)http://en.wikipedia.org/wiki/Equivalent_series_resistancehttp://en.wikipedia.org/wiki/Breakdown_voltagehttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/LC_circuithttp://en.wikipedia.org/wiki/LC_circuithttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Passivity_(engineering)http://en.wikipedia.org/wiki/Electronic_componenthttp://en.wikipedia.org/wiki/Electrical_conductorhttp://en.wikipedia.org/wiki/Dielectrichttp://en.wikipedia.org/wiki/Potential_differencehttp://en.wikipedia.org/wiki/Electric_fieldhttp://en.wikipedia.org/wiki/Energyhttp://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Faradhttp://en.wikipedia.org/wiki/Electric_chargehttp://en.wikipedia.org/wiki/Leakage_(electronics)http://en.wikipedia.org/wiki/Lead_(electronics)http://en.wikipedia.org/wiki/Equivalent_series_resistancehttp://en.wikipedia.org/wiki/Breakdown_voltagehttp://en.wikipedia.org/wiki/Direct_currenthttp://en.wikipedia.org/wiki/Alternating_currenthttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/LC_circuithttp://en.wikipedia.org/wiki/LC_circuithttp://en.wikipedia.org/wiki/Frequency
-
8/9/2019 Obstacle Sensing Robot Report
39/59
Theor+ of oper%tion
M$in $#tic&! C$$cit$nc!
Ch$#)! s!$#$tion in $ $#$&&!&&$t! c$$cito# c$,s!s $n int!#n$& !&!ct#ic +i!&'- A
'i!&!ct#ic o#$n)! #!',c!s th! +i!&' $n' inc#!$s!s th! c$$cit$nc!-
A sim&! '!monst#$tion o+ $ $#$&&!&&$t! c$$cito#
A c$$cito# consists o+ t%o con',cto#s s!$#$t!' /( $ noncon',cti"! #!)ion-Th!
noncon',cti"! s,/st$nc! is c$&&!' th! 'i!&!ct#ic m!'i,m. $&tho,)h this m$( $&so
m!$n $ "$c,,m o# $ s!micon',cto# '!&!tion #!)ion ch!mic$&&( i'!ntic$& to th!
con',cto#s- A c$$cito# is $ss,m!' to /! s!&+cont$in!' $n' iso&$t!'. %ith no n!t
!&!ct#ic ch$#)! $n' no in+&,!nc! +#om $n !1t!#n$& !&!ct#ic +i!&'- Th! con',cto#s
th,s cont$in !,$& $n' oosit! ch$#)!s on th!i# +$cin) s,#+$c!s. $n' th! 'i!&!ct#ic
http://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Conductorhttp://en.wikipedia.org/wiki/Dielectric_mediumhttp://en.wikipedia.org/wiki/Vacuumhttp://en.wikipedia.org/wiki/Semiconductorhttp://en.wikipedia.org/wiki/Depletion_regionhttp://en.wikipedia.org/wiki/Electric_chargehttp://en.wikipedia.org/wiki/File:Plattenkondensator_hg.jpghttp://en.wikipedia.org/wiki/File:Plattenkondensator_hg.jpghttp://en.wikipedia.org/wiki/File:Capacitor_schematic_with_dielectric.svghttp://en.wikipedia.org/wiki/File:Capacitor_schematic_with_dielectric.svghttp://en.wikipedia.org/wiki/Capacitancehttp://en.wikipedia.org/wiki/Conductorhttp://en.wikipedia.org/wiki/Dielectric_mediumhttp://en.wikipedia.org/wiki/Vacuumhttp://en.wikipedia.org/wiki/Semiconductorhttp://en.wikipedia.org/wiki/Depletion_regionhttp://en.wikipedia.org/wiki/Electric_charge
-
8/9/2019 Obstacle Sensing Robot Report
40/59
cont$ins $n !&!ct#ic +i!&'- Th! c$$cito# is $ #!$son$/&( )!n!#$& mo'!& +o# !&!ct#ic
+i!&'s %ithin !&!ct#ic ci#c,its-
An i'!$& c$$cito# is %ho&&( ch$#$ct!#i*!' /( $ const$nt c$$cit$nc! C . '!+in!' $s
th! #$tio o+ ch$#)! Q on !$ch con',cto# to th! "o&t$)! V /!t%!!n th!m
Som!tim!s ch$#)! /,i&', $++!cts th! m!ch$nics o+ th! c$$cito#. c$,sin) th!
c$$cit$nc! to "$#(- In this c$s!. c$$cit$nc! is '!+in!' in t!#ms o+ inc#!m!nt$&
ch$n)!s
In SI ,nits. $ c$$cit$nc! o+ on! +$#$' m!$ns th$t on! co,&om/ o+ ch$#)! on !$chcon',cto# c$,s!s $ "o&t$)! o+ on! "o&t $c#oss th! '!"ic!-
En!#)( sto#$)!
Wo#0 m,st /! 'on! /( $n !1t!#n$& in+&,!nc! to mo"! ch$#)! /!t%!!n th!
con',cto#s in $ c$$cito#- Wh!n th! !1t!#n$& in+&,!nc! is #!mo"!'. th! ch$#)!
s!$#$tion !#sists $n' !n!#)( is sto#!' in th! !&!ct#ic +i!&'- I+ ch$#)! is &$t!#
$&&o%!' to #!t,#n to its !,i&i/#i,m osition. th! !n!#)( is #!&!$s!'- Th! %o#0 'on!
in !st$/&ishin) th! !&!ct#ic +i!&'. $n' h!nc! th! $mo,nt o+ !n!#)( sto#!'. is )i"!n
/(
ESISTO
http://en.wikipedia.org/wiki/SIhttp://en.wikipedia.org/wiki/Faradhttp://en.wikipedia.org/wiki/Coulombhttp://en.wikipedia.org/wiki/Volthttp://en.wikipedia.org/wiki/Work_(thermodynamics)http://en.wikipedia.org/wiki/Equilibriumhttp://en.wikipedia.org/wiki/SIhttp://en.wikipedia.org/wiki/Faradhttp://en.wikipedia.org/wiki/Coulombhttp://en.wikipedia.org/wiki/Volthttp://en.wikipedia.org/wiki/Work_(thermodynamics)http://en.wikipedia.org/wiki/Equilibrium
-
8/9/2019 Obstacle Sensing Robot Report
41/59
R!sisto#s $#! ,s!' to &imit th! "$&,! o+ c,##!nt in $ ci#c,it- R!sisto#s o++!#
oosition to th! +&o% o+ c,##!nt- Th!( $#! !1#!ss!' in ohms +o# %hich th! s(m/o&
is Ω4- R!sisto#s $#! /#o$'&( c&$ssi+i!' $s
6 Fi1!' R!sisto#s
8 $#i$/&! R!sisto#s
Fi1e- e*i*tor* "
Th! most common o+ &o% %$tt$)!. +i1!' t(! #!sisto#s is th! mo&'!'c$#/on
comosition #!sisto#- Th! #!sisti"! m$t!#i$& is o+ c$#/on c&$( comosition- Th!
&!$'s $#! m$'! o+ tinn!' co!#- R!sisto#s o+ this t(! $#! #!$'i&( $"$i&$/&! in "$&,!#$n)in) +#om +!% ohms to $/o,t 8?MΩ. h$"in) $ to&!#$nc! #$n)! o+ ; to 8?-
Th!( $#! ,it! in!1!nsi"!- Th! #!&$ti"! si*! o+ $&& +i1!' #!sisto#s ch$n)!s %ith th!
%$tt$)! #$tin)-
Anoth!# "$#i!t( o+ c$#/on comosition #!sisto#s is th! m!t$&i*!' t(!-
It is m$'! /( '!osition $ homo)!n!o,s +i&m o+ ,#! c$#/on o"!# $ )&$ss. c!#$mic
o# oth!# ins,&$tin) co#!- This t(! o+ +i&m#!sisto# is som!tim!s c$&&!' th! #!cision
t(!. sinc! it c$n /! o/t$in!' %ith $n $cc,#$c( o+ ±6-
L!$' Tinn!' Co!# M$t!#i$&
Co&o,# Co'in) Mo&'!' C$#/on C&$( Comosition
Fi1!' R!sisto#
-
8/9/2019 Obstacle Sensing Robot Report
42/59
A Wire Wo#n- e*i*tor "
It ,s!s $ &!n)th o+ #!sist$nc! %i#!. s,ch $s nich#om!- This %i#! is %o,n'!' on to $
#o,n' ho&&o% o#c!&$in co#!- Th! !n's o+ th! %in'in) $#! $tt$ch!' to th!s! m!t$&
i!c!s ins!#t!' in th! co#!- Tinn!' co!# %i#! &!$'s $#! $tt$ch!' to th!s! m!t$&
i!c!s- This $ss!m/&( is co$t!' %ith $n !n$m!& co$tin) o%'!#!' )&$ss- This
co$tin) is "!#( smooth $n' )i"!s m!ch$nic$& #ot!ction to %in'in)- Common&(
$"$i&$/&! %i#! %o,n' #!sisto#s h$"! #!sist$nc! "$&,!s #$n)in) +#om 6Ω to 6??K Ω.
$n' %$tt$)! #$tin) , to $/o,t 8??W-
Co-ing Of e*i*tor "
Som! #!sisto#s $#! &$#)! !no,)h in si*! to h$"! th!i# #!sist$nc! #int!' on th!
/o'(- Ho%!"!# th!#! $#! som! #!sisto#s th$t $#! too sm$&& in si*! to h$"! n,m/!#s
#int!' on th!m- Th!#!+o#!. $ s(st!m o+ co&o,# co'in) is ,s!' to in'ic$t! th!i#
"$&,!s- Fo# +i1!'. mo,&'!' comosition #!sisto# +o,# co&o,# /$n's $#! #int!' on
on! !n' o+ th! o,t!# c$sin)- Th! co&o,# /$n's $#! $&%$(s #!$' &!+t to #i)ht +#om th!
!n' th$t h$s th! /$n's c&os!st to it- Th! +i#st $n' s!con' /$n' #!#!s!nts th! +i#st
$n' s!con' si)ni+ic$nt 'i)its. o+ th! #!sist$nc! "$&,!- Th! thi#' /$n' is +o# th!
n,m/!# o+ *!#os th$t +o&&o% th! s!con' 'i)it- In c$s! th! thi#' /$n' is )o&' o#
si&"!#. it #!#!s!nts $ m,&ti&(in) +$cto# o+ ?-6to ?-?6- Th! +o,#th /$n' #!#!s!nts
th! m$n,+$ct,#!4s to&!#$nc!-
RESISTOR COLOUR CHART
/ green
+ blac'
, brown
* red
F orange
- ellow
2 blue
> purple
? silver
E white
+ blac'
, brown
* red
F orange
- ellow
2 blue
> purple
? silver
E white
/ green
+ blac'
, brown
* red
F orange
- ellow
2 blue
> purple
? silver
E white
/ green
+ blac'
, brown
* red
F orange
- ellow
2 blue
> purple
? silver
E white
-
8/9/2019 Obstacle Sensing Robot Report
43/59
For e1%,p$e. i+ $ #!sisto# h$s $ co&o,# /$n' s!,!nc! (!&&o%. "io&!t. o#$n)! $n'
)o&'
Then it* r%nge 2i$$ 3e4
Y!&&o%:. "io&!t
-
8/9/2019 Obstacle Sensing Robot Report
44/59
Th! st$n'$#' co&o,# co'! c$nnot sho% "$&,!s o+ &!ss th$n 6? - To sho% th!s!
sm$&& "$&,!s t%o s!ci$& co&o,#s $#! ,s!' +o# th! thi#' /$n' )o&'. %hich m!$ns
?-6 $n' si&"!# %hich m!$ns ?-?6- Th! +i#st $n' s!con' /$n's #!#!s!nt th!
'i)its $s no#m$&-
For e1%,p$e"
#!'. "io&!t. )o&' /$n's #!#!s!nt 8< ?-6 8-<
/&,!. )#!!n. si&"!# /$n's #!#!s!nt ;7 ?-?6 ?-;7
Th! +o,#th /$n' o+ th! co&o,# co'! sho%s th! to&!#$nc! o+ $ #!sisto#- To&!#$nc! is
th! #!cision o+ th! #!sisto# $n' it is )i"!n $s $ !#c!nt$)!- Fo# !1$m&! $ 9>?
#!sisto# %ith $ to&!#$nc! o+ 6? %i&& h$"! $ "$&,! %ithin 6? o+ 9>? . /!t%!!n
9>? 9> 9;6 $n' 9>? 9> :8> 9> is 6? o+ 9>?-
A s!ci$& co&o,# co'! is ,s!' +o# th! +o,#th /$n' to&!#$nc!
si&"!# 6?. )o&' ;. #!' 8. /#o%n 6-
I+ no +o,#th /$n' is sho%n th! to&!#$nc! is 8?-
VAIABLE ESISTO"
In !&!ct#onic ci#c,its. som!tim!s it /!com!s n!c!ss$#( to $'5,st th! "$&,!s o+
c,##!nts $n' "o&t$)!s- Fo# n !1$m&! it is o+t!n '!si#!' to ch$n)! th! "o&,m! o+
so,n'. th! /#i)htn!ss o+ $ t!&!"ision ict,#! !tc- S,ch $'5,stm!nts c$n /! 'on! /(
,sin) "$#i$/&! #!sisto#s-
-
8/9/2019 Obstacle Sensing Robot Report
45/59
A$tho#gh the )%ri%3$e re*i*tor* %re #*#%$$+ c%$$e- rheo*t%t* in other
%pp$ic%tion*6 the *,%$$er )%ri%3$e re*i*tor* co,,on$+ #*e- in e$ectronic
circ#it* %re c%$$e- potentio,eter*7
TANSISTOS
A t#$nsisto# is $n $cti"! '!"ic!- It consists o+ t%o PN 5,nctions +o#m!' /(
s$n'%ichin) !ith!# t(! o# nt(! s!micon',cto# /!t%!!n $ $i# o+ oosit!
t(!s-
Th!#! $#! t%o t(!s o+ t#$nsisto#
6- nn t#$nsisto#
8- n t#$nsisto#
An nn t#$nsisto# is comos!' o+ t%o nt(! s!micon',cto#s s!$#$t!' /( $
thin s!ction o+ t(!- Ho%!"!# $ n t(! s!micon',cto# is +o#m!' /( t%o
s!ctions s!$#$t!' /( $ thin s!ction o+ nt(!-
-
8/9/2019 Obstacle Sensing Robot Report
46/59
T#$nsisto# h$s t%o n 5,nctions on! 5,nction is +o#%$#' /i$s!' $n' oth!# is
#!"!#s!' /i$s!'- Th! +o#%$#' 5,nction h$s $ &o% #!sist$nc! $th %h!#!$s $ #!"!#s!
/i$s!' 5,nction h$s $ hi)h #!sist$nc! $th-
Th! %!$0 si)n$& is int#o',c!' in th! &o% #!sist$nc! ci#c,it $n' o,t,t is
t$0!n +#om th! hi)h #!sist$nc! ci#c,it- Th!#!+o#! $ t#$nsisto# t#$ns+!#s $ si)n$& +#om
$ &o% #!sist$nc! to hi)h #!sist$nc!-
T#$nsisto# h$s th#!! s!ctions o+ 'o!' s!micon',cto#s- Th! s!ction on on!
si'! is !mitt!# $n' s!ction on th! oosit! si'! is co&&!cto#- Th! mi''&! s!ction is
/$s!-
E,itter " Th! s!ction on on! si'! th$t s,&i!s ch$#)! c$##i!#s is c$&&!' !mitt!#-
Th! !mitt!# is $&%$(s +o#%$#' /i$s!' %-#-t- /$s!-
Co$$ector " Th! s!ction on th! oth!# si'! th$t co&&!cts th! ch$#)! is c$&&!' co&&!cto#-
Th! co&&!cto# is $&%$(s #!"!#s!' /i$s!'-
B%*e " Th! mi''&! s!ction %hich +o#ms t%o n5,nctions /!t%!!n th! !mitt!# $n'
co&&!cto# is c$&&!' /$s!-
-
8/9/2019 Obstacle Sensing Robot Report
47/59
A t#$nsisto# #$is!s th! st#!n)th o+ $ %!$0 si)n$& $n' th,s $cts $s $n $m&i+i!#-
Th! %!$0 si)n$& is $&i!' /!t%!!n !mitt!#/$s! 5,nction $n' o,t,t is t$0!n
$c#oss th! &o$' Rc conn!ct!' in th! co&&!cto# ci#c,it- Th! co&&!cto# c,##!nt +&o%in)
th#o,)h $ hi)h &o$' #!sist$nc! Rc #o',c!s $ &$#)! "o&t$)! $c#oss it- Th,s $ %!$0
si)n$& $&i!' in th! in,t $!$#s in th! $m&i+i!' +o#m in th! co&&!cto# ci#c,it-
S2itch
A #!ss,#! s!nso# o# s%itch m!$s,#!s #!ss,#!- P#!ss,#! is ,s,$&&( !1#!ss!' in
t!#ms o+ +o#c! !# ,nit $#!$- A #!ss,#! s!nso# ,s,$&&( $cts $s $ t#$ns',c!# it
)!n!#$t!s $ si)n$& $s $ +,nction o+ th! #!ss,#! imos!'-
-
8/9/2019 Obstacle Sensing Robot Report
48/59
P#!ss,#! s!nso#s c$n /! c&$ssi+i!' in t!#m o+ #!ss,#! #$n)!s th!( m!$s,#!.
t!m!#$t,#! #$n)!s o+ o!#$tion. $n' most imo#t$nt&( th! t(! o+ #!ss,#! th!(
m!$s,#!- In t!#ms o+ #!ss,#! t(!. #!ss,#! s!nso#s c$n /! 'i"i'!' into +i"!
c$t!)o#i!s
89 A3*o$#te pre**#re *en*or
This s!nso# m!$s,#!s th! #!ss,#! #!&$ti"! to !#+!ct "$cc,m #!ss,#!-
:9 G%#ge pre**#re *en*or
This s!nso# is ,s!' in 'i++!#!nt $&ic$tions /!c$,s! it c$n /! c$&i/#$t!' to
m!$s,#! th! #!ss,#! #!&$ti"! to $ )i"!n $tmosh!#ic #!ss,#! $t $ )i"!n &oc$tion-
;9V%cc#, pre**#re *en*or
This s!nso# is ,s!' to m!$s,#! #!ss,#! &!ss th$n th! $tmosh!#ic #!ss,#! $t $
)i"!n &oc$tion-
59 Differenti%$ pre**#re *en*or
This s!nso# m!$s,#!s th! 'i++!#!nc! /!t%!!n t%o o# mo#! #!ss,#!s int#o',c!' $sin,ts to th! s!nsin) ,nit-
(9 Se%$e- pre**#re *en*or
This s!nso# is th! s$m! $s th! )$,)! #!ss,#! s!nso# !1c!t th$t it is #!"io,s&(
c$&i/#$t!' /( m$n,+$ct,#!#s to m!$s,#! #!ss,#! #!&$ti"! to s!$ &!"!& #!ss,#!-
-
8/9/2019 Obstacle Sensing Robot Report
49/59
Fi)" O!#$tion o+ #!ss,#! s%itch
878ore*i*ti)e Str%in G%#ge?
Us!s th! i!*o#!sisti"! !++!ct o+ /on'!' o# +o#m!' st#$in )$,)!s to '!t!ct st#$in
',! to $&i!' #!ss,#!- G!n!#$&&(. th! st#$in )$,)!s $#! conn!ct!' to +o#m $ %h!$t
ston! /#i')! ci#c,it to m$1imi*! th! o,t,t o+ th! s!nso#- This is th! most
common&( !m&o(!' s!nsin) t!chno&o)( +o# )!n!#$& ,#os! #!ss,#!
m!$s,#!m!nt-
-
8/9/2019 Obstacle Sensing Robot Report
50/59
C%p%citi)e Us!s $ 'i$h#$)m $n' #!ss,#! c$"it( to c#!$t! $ "$#i$/&! c$$cito# to
'!t!ct st#$in ',! to $&i!' #!ss,#!- Common t!chno&o)i!s ,s! m!t$&. c!#$mic.
$n' si&icon 'i$h#$)ms- G!n!#$&&(. th!s! t!chno&o)i!s $#! most $&i!' to &o%
#!ss,#!s A/so&,t!. Di++!#!nti$& $n' G$,)!
E$ectro,%gnetic ? M!$s,#!s th! 'is&$c!m!nt o+ $ 'i$h#$)m /( m!$ns o+
ch$n)!s in in',ct$nc! #!&,ct$nc!. LDT. H$&& E++!ct. o# /( !''( c,##!nt
#inci$&-
Pie>oe$ectric Us!s th! i!*o!&!ct#ic !++!ct in c!#t$in m$t!#i$&s s,ch $s ,$#t* to
m!$s,#! th! st#$in ,on th! s!nsin) m!ch$nism ',! to #!ss,#!- This t!chno&o)( is
common&( !m&o(!' +o# th! m!$s,#!m!nt o+ hi)h&( '(n$mic #!ss,#!s-
Optic%$ Us!s th! h(sic$& ch$n)! o+ $n otic$& +i/!# to '!t!ct st#$in ',! to
$&i!' #!ss,#!-
Potentio,etric ? Us!s th! motion o+ $ %i!# $&on) $ #!sisti"! m!ch$nism to '!t!ct
th! st#$in c$,s!' /( $&i!' #!ss,#!-
W@EEL
A 2hee$ is $ ci#c,&$# comon!nt th$t is int!n'!' to #ot$t! on $n $1i$& /!$#in)- Th!
%h!!& is on! o+ th! m$in comon!nts o+ th! %h!!& $n' $1&! %hich is on! o+ th! si1
sim&! m$chin!s- Wh!!&s. in con5,nction %ith $1&!s. $&&o% h!$"( o/5!cts to /!
mo"!' !$si&( +$ci&it$tin) mo"!m!nt o# t#$nso#t$tion %hi&! s,o#tin) $ &o$'. o#
!#+o#min) &$/o# in m$chin!s- Wh!!&s $#! $&so ,s!' +o# oth!# ,#os!s. s,ch $s $shis %h!!&. st!!#in) %h!!&. ott!#s %h!!& $n' +&(%h!!&-
Common !1$m&!s $#! +o,n' in t#$nso#t $&ic$tions- A %h!!& )#!$t&( #!',c!s
+#iction /( +$ci&it$tin) motion /( #o&&in) to)!th!# %ith th! ,s! o+ $1&!s- In o#'!# +o#
http://en.wikipedia.org/wiki/Bearing_(mechanical)http://en.wikipedia.org/wiki/Wheel_and_axlehttp://en.wikipedia.org/wiki/Simple_machinehttp://en.wikipedia.org/wiki/Simple_machinehttp://en.wikipedia.org/wiki/Ship's_wheelhttp://en.wikipedia.org/wiki/Steering_wheelhttp://en.wikipedia.org/wiki/Potter's_wheelhttp://en.wikipedia.org/wiki/Flywheelhttp://en.wikipedia.org/wiki/Transporthttp://en.wikipedia.org/wiki/Frictionhttp://en.wikipedia.org/wiki/Rollinghttp://en.wikipedia.org/wiki/Axlehttp://en.wikipedia.org/wiki/Bearing_(mechanical)http://en.wikipedia.org/wiki/Wheel_and_axlehttp://en.wikipedia.org/wiki/Simple_machinehttp://en.wikipedia.org/wiki/Simple_machinehttp://en.wikipedia.org/wiki/Ship's_wheelhttp://en.wikipedia.org/wiki/Steering_wheelhttp://en.wikipedia.org/wiki/Potter's_wheelhttp://en.wikipedia.org/wiki/Flywheelhttp://en.wikipedia.org/wiki/Transporthttp://en.wikipedia.org/wiki/Frictionhttp://en.wikipedia.org/wiki/Rollinghttp://en.wikipedia.org/wiki/Axle
-
8/9/2019 Obstacle Sensing Robot Report
51/59
%h!!&s to #ot$t!. $ mom!nt n!!'s to /! $&i!' to th! %h!!& $/o,t its $1is. !ith!#
/( %$( o+ )#$"it(. o# /( th! $&ic$tion o+ $noth!# !1t!#n$& +o#c! o# to#,!-
CONNECTOS
Conn!cto#s $#! /$sic$&&( ,s!' +o# int!#+$c! /!t%!!n t%o- H!#! %! ,s!
conn!cto#s +o# h$"in) int!#+$c! /!t%!!n PCB $n' =?;6 Mic#o#oc!sso# Kit-
Th!#! $#! t%o t(!s o+ conn!cto#s th!( $#! m$&! $n' +!m$&!- Th! on!. %hich
is %ith ins insi'!. is +!m$&! $n' oth!# is m$&!-
Th!s! conn!cto#s $#! h$"in) /,s %i#!s %ith th!m +o# conn!ction-
Fo# hi)h +#!,!nc( o!#$tion th! $"!#$)! ci#c,m+!#!nc! o+ $ co$1i$& c$/&! m,st /!
&imit!' to $/o,t on! %$"!&!n)th. in o#'!# to #!',c! m,&timo'$& #o$)$tion $n'
http://en.wikipedia.org/wiki/Moment_(physics)http://en.wikipedia.org/wiki/Torquehttp://en.wikipedia.org/wiki/Moment_(physics)http://en.wikipedia.org/wiki/Torque
-
8/9/2019 Obstacle Sensing Robot Report
52/59
!&imin$t! !##$tic #!+&!ction co!++ici!nts. o%!# &oss!s. $n' si)n$& 'isto#tion- Th!
st$n'$#'i*$tion o+ co$1i$& conn!cto#s ',#in) Wo#&' W$# II %$s m$n'$to#( +o#
mic#o%$"! o!#$tion to m$int$in $ &o% #!+&!ction co!++ici!nt o# $ &o% "o&t$)!
st$n'in) %$"! #$tio-
Se)en t+pe* of ,icro2%)e co%1i%$ connector* %re %* fo$$o2*"
6-APC9-;
8-APC<
9-BNC
:-SMA
;-SMC
7-TNC
>er
It is $n !&!ct#onic si)n$&in) '!"ic! %hich #o',c!s /,**in) so,n'- It is common&(
,s!' in $,tomo/i&!s. hon! $&$#m s(st!ms $n' ho,s!ho&' $&i$nc!s- B,**!#s
-
8/9/2019 Obstacle Sensing Robot Report
53/59
%o#0 in th! s$m! m$nn!# $s $n $&$#m %o#0s- Th!( $#! )!n!#$&&( !,i!' %ith
s!nso#s o# s%itch!s conn!ct!' to $ cont#o& ,nit $n' th! cont#o& ,nit i&&,min$t!s $
&i)ht on th! $#o#i$t! /,tton o# cont#o& $n!&. $n' so,n' $ %$#nin) in th! +o#m o+
$ contin,o,s o# int!#mitt!nt /,**in) o# /!!in) so,n'&
Th! %o#' /,**!# com!s +#om th! #$sin) nois! th$t /,**!#s m$'! %h!n th!(
%!#! !&!ct#om!ch$nic$& '!"ic!s. o!#$t!' +#om st!!''o%n AC &in! "o&t$)! $t
;? o# 7? c(c&!s-
T(ic$& ,s!s o+ /,**!#s $n' /!!!#s inc&,'! $&$#ms. tim!#s $n' con+i#m$tion o+
,s!# in,t s,ch $s $ mo,s! c&ic0 o# 0!(st#o0!-
*&E&8T+pe* of B#>>er*
The di;erent tpes of buIIers are electric buIIers8 electronic
buIIers8 mechanical buIIers8 electromechanical8 magnetic
buIIers8 pieIoelectric buIIers and pieIo buIIers&
=i9 E$ectric 3#>>er* X
A basic model of electric buIIer usuall consists of simple circuit
components such as resistors8 a capacitor and /// timer !$ or an
integrated circuit with a range of timer and multi.vibrator
functions& !t wor's through small bits of electricit vibrating
together which causes sound&
3ii5 "lectronic buIIers G
An electronic buIIer comprises an acoustic vibrator comprised of
a circular metal plate having its entire peripher rigidl secured to
a support8 and a pieIoelectric element adhered to one face of the
http://en.wikipedia.org/wiki/Alarmhttp://en.wikipedia.org/wiki/Timerhttp://en.wikipedia.org/wiki/Alarmhttp://en.wikipedia.org/wiki/Timer
-
8/9/2019 Obstacle Sensing Robot Report
54/59
metal plate& A driving circuit applies electric driving signals to the
vibrator to vibrationall drive it at a ,N multiple of its natural
freuenc8 where N is an integer8 so that the vibrator emits an
audible buIIing sound& The metal plate is preferabl mounted to
undergo vibration in a natural vibration mode having onl one
nodal circle& The drive circuit includes an inductor connected in a
closed loop with the vibrator8 which functions as a capacitor8 and
the circuit applies signals at a selectivel variable freuenc to
the closed loop to accordingl var the inductance of the inductor
to thereb var the period of oscillation of the acoustic vibrator
and the resultant freuenc of the buIIing sound&
3iii5 %echanical BuIIer.
A 5o( /,**!# is $n !1$m&! o+ $ ,#!&( m!ch$nic$& /,**!#-
3iv5 PieIo BuIIers PieIoelectric BuIIers G
A piezo buzzer is made from two conductors that are separated b
PieIo crstals& 9hen a voltage is applied to these crstals8 the
push on one conductor and pull on the other& The result of this
push and pull is a sound wave& These buIIers can be used for
man things8 li'e signaling when a period of time is up or ma'ing
a sound when a particular button has been pushed& The process
http://en.wikipedia.org/wiki/Joy_buzzerhttp://en.wikipedia.org/wiki/Joy_buzzer
-
8/9/2019 Obstacle Sensing Robot Report
55/59
can also be reversed to use as a guitar pic'up& 9hen a sound
wave is passed8 the create an electric signal that is passed on to
an audio amplier&
Pi!*o /,**!#s $#! sm$&& !&!ct#onic '!"ic!s th$t !mit so,n's %h!n '#i"!n /( &o%
"o&t$)!s $n' c,##!nts- Th!( $#! $&so c$&&!' i!*o!&!ct#ic /,**!#s- Th!( ,s,$&&(
h$"! t%o !&!ct#o'!s $n' $ 'i$h#$)m- Th! 'i$h#$)m is m$'! +#om $ m!t$& &$t!
$n' i!*o!&!ct#ic m$t!#i$& s,ch $s $ c!#$mic &$t!-
3v5 %agnetic BuIIers G
M$)n!tic /,**!#s $#! m$)n!tic $,'i/&! si)n$& '!"ic!s %ith /,i&tin osci&&$tin)
ci#c,its- Th! const#,ction com/in!s $n osci&&$tion ci#c,it ,nit %ith $ '!t!ction coi&.
$ '#i"! coi& $n' $ m$)n!tic t#$ns',c!#- T#$nsisto#s. #!sisto#s. 'io'!s $n' oth!# sm$&&
'!"ic!s $ct $s ci#c,it '!"ic!s +o# '#i"in) so,n' )!n!#$to#s- With th! $&ic$tion o+
"o&t$)!. c,##!nt +&o%s to th! '#i"! coi& on #im$#( si'! $n' to th! '!t!ction coi& on
th! s!con'$#( si'!- Th! $m&i+ic$tion ci#c,it. inc&,'in) th! t#$nsisto# $n' th!
+!!'/$c0 ci#c,it. c$,s!s "i/#$tion- Th! osci&&$tion c,##!nt !1cit!s th! coi& $n' th!
,nit )!n!#$t!s $n AC m$)n!tic +i!&' co##!son'in) to $n osci&&$tion +#!,!nc(- This
AC m$)n!tic +i!&' m$)n!ti*!s th! (o0! com#isin) th! m$)n!tic ci#c,it- Th!
osci&&$tion +#om th! int!#mitt!nt m$)n!ti*$tion #omts th! "i/#$tion 'i$h#$)m to
"i/#$t! , $n' 'o%n. )!n!#$tin) /,**!# so,n's th#o,)h th! #!son$to#-
In this #o5!ct. $ m$)n!tic /,**!# h$s /!!n ,s!'-
:77: Circ#it of 3#>>er
-
8/9/2019 Obstacle Sensing Robot Report
56/59
:77; o$e of 3#>>er in thi* project
B,**!# in this s(st!m )i"!s th! /!! %h!n c$# mo"!s insi'! c,ttin) th! in+#$#!'
&i)ht- B$sic$&&( it )!n!#$t!s th! si)n$& to in'ic$t! th$t c$# h$s !nt!#!' in th! $#0in)
s$c!-
-
8/9/2019 Obstacle Sensing Robot Report
57/59
FUTUE APPLICATIONS"
Robots help automate thousands of factories around theworld&
Robot ma'es the deliver of mail8 pac'ages and materials
fast and eKcient&
Scientists and engineers have been e:perimenting with snow
ploughs and even passenger cars that can follow magnetic
lines in LsmartM highwas& These robotic vehicles can sense
the road8 obstacles and each other8 eliminating traKc snarls
and ma'ing our highwas safer and easier to travel&
Someda we will simpl tell our cars where to ta'e us and
line following circuitr will help get us there safel and
without e;ort
-
8/9/2019 Obstacle Sensing Robot Report
58/59
Conc$#*ion
In th! conc&,'in) #!m$#0s %! %o,&' &i0! to s$( th$t $s o,# O/st$c&! s!nsin) #o/ot
s,cc!ss+,&&( +o&&o% th! $th. sti&& it n!!'s som! mo'i+ic$tion- Som! mo'i+ic$tions
$#! n!!'!' to m$0! it sm$#t!# so th$t it c$n %o#0 mo#! !++ici!nt&(- To m$0! it +$st
$n' +,#io,s. mo#! s!nsiti"! s!nso#s $#! n!!'!'- A&so "ision/$s!' #o/otic s(st!m
c$n /! '!"!&o!' so th$t it c$n o/t$in th! im$)!s o+ o/st$c&!s $n' c$n ch$n)! $th-
To m$0! it mo#! in',st#( o#i!nt!' +$st s!nso#s $#! #!,i#!'- Cont#o& c$n /!
im#o"!' /( ,sin) st!!# moto#s-
-
8/9/2019 Obstacle Sensing Robot Report
59/59
BIBLIOGAP@!
ELECTRONIC DEICES AND CIRCUIT THEORY BY ROBERT L-
BOYLSTEAD AND LOUIS NASHELSKY
2Em/!''!' S(st!m ,sin) =?;62 E/oo0
L$&it K,m$# )o!& $n' G$,#$" Sh$#m$ +#om M!!#,t
OPAMPS AND LINEAR INTEGRATED CIRCUITS BY RAMAKANT A-
GAYAKWAD
DIGITAL DESIGN BY M-MORRIS MANO
A COURSE IN ELECTRICAL END ELECTRONIC MEASUREMENTS
AND INSTRUMENTATION BY A-K-SAWHNEY
SOME OF THE FOLLOWING WEB SITES WERE ACCESSED
• %%%-$&&'$t$sh!!ts-com
• %%%-'$t$sh!!tc$t$&o)-com
• %%%-!&!ct#onicci#c,itsch!m$tic-com
• %%%-!$n$#om$-com
• %%%-($hoo-com
• %%%-)oo)&!-com
• %%%-sci!&!ct#onics-com
• %%%-$#$&&$1-com
• %%%-$#$&&$1inc-com
http://www.alldatasheets.com/http://www.datasheetcatalog.com/http://www.electroniccircuitschematic.com/http://www.epanaroma.com/http://www.yahoo.com/http://www.google.com/http://www.scielectronics.com/http://www.parallax.com/http://www.parallaxinc.com/http://www.alldatasheets.com/http://www.datasheetcatalog.com/http://www.electroniccircuitschematic.com/http://www.epanaroma.com/http://www.yahoo.com/http://www.google.com/http://www.scielectronics.com/http://www.parallax.com/http://www.parallaxinc.com/