
Object Recognition & Model Based Tracking © Danica Kragic Tracking system.
56
ject Recognition & Model Based Trackin © Danica Kragic Tracking system
-
Upload
philip-osborne -
Category
Documents
-
view
221 -
download
1
Transcript of Object Recognition & Model Based Tracking © Danica Kragic Tracking system.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Tracking systemTracking system

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
MotivationMotivation
Manipulating objects in domestic environments
Localization / NavigationObject RecognitionServoing TrackingGrasping Pose estimation

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
StepsSteps
Recognition (2D)Tracking (2D)Pose estimation (3D) :
Initial pose estimation
Where in the image … ?
Where in the world … ?

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Initial Pose EstimationInitial Pose Estimation
Recognition/Tracking Pose estimation (x,y) (X,Y,Z, , , )

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Example ObjectsExample Objects

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
CharacteristicsCharacteristics
Simple geometry (polyhedra, cones,
cylinders)Specular surfacesBackgroundIlluminationSlippery objects

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
CharacteristicsCharacteristics
Simple geometry wireframe modelsSpecular surfaces - ll – Illumination - ll – Background - ll – Highly texture appearanceSlippery objects power grasps

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Model Based Techniques
Model Based Techniques
Appearance based methods Geometry based methods
3D wireframe modelsComplete pose estimationTechniques from computer graphics used for rendering
FUSION!

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Object RecognitionObject Recognition
Removes background, preserves object.Necessary to raise the signal to noise ratio, for the pose estimatior.Solved using color cooccurrence histograms.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose EstimationPose Estimation
An apperance based method is used to recognize the object, and estimate an initial pose.A geometric model based method is used to obtain an accurate pose.Algorithm combines the robustness of appearance based methods with the accuracy of feature based methods.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Color Cooccurrence Histograms
Color Cooccurrence Histograms
Apperance based method.Based on color cues only.Superior to standard color histograms.Invariant to translation and rotation.Robust towards scale changes.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Building Color Cooccurrence Histograms
Building Color Cooccurrence Histograms
All pairs of pixels within a certain radius contribute to the histogram.Example: 4x4 image with 3 colors, and a maximum radius of 3 pixels.
Histogram:

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Building Color Cooccurrence Histograms
Building Color Cooccurrence Histograms
When all pairs have been counted, the histogram is normalized. Each bin is divided with the total number of pixel pairs.
Histogram:
50 %

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Color Cooccurrence Histograms - Matching
Color Cooccurrence Histograms - Matching
A common histogram matching method is used.
N
i
ihihMatch1
21 ])[],[min(
Reduces the effect of background noise, as unexpected colors will not penalize the match value.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Color QuantizationColor Quantization
Before the histogram can be built, the colors in the image need to be quantized. This is done using k-means clustering.
Red
Green
Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
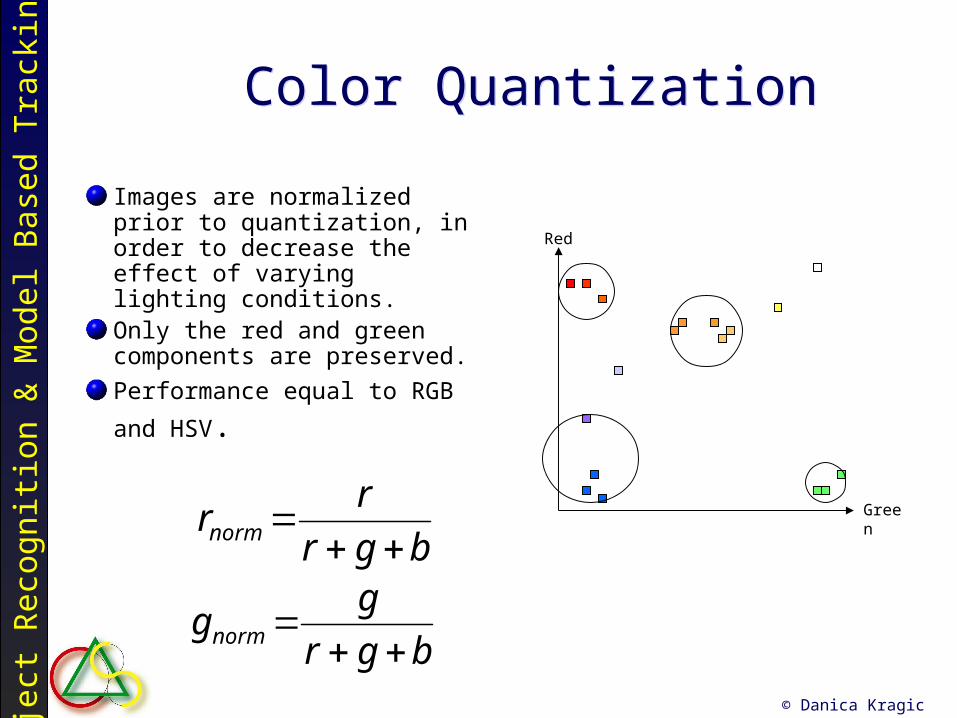
Color QuantizationColor Quantization
Images are normalized prior to quantization, in order to decrease the effect of varying lighting conditions.Only the red and green components are preserved.
Performance equal to RGB
and HSV.
Red
Green
bgr
rrnorm
bgr
ggnorm

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Color Constancy Problem
Color Constancy Problem
If lighting conditions change, colors may ”fall out of” their original cluster, or even worse, into another one.
Red
Green
green light

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Object Segmentation - Training
Object Segmentation - Training
The system was trained using both front and back sides of the objects.The background of the training images was manually removed before training.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Object SegmentationObject Segmentation
A search window scans through the image, comparing the cooccurrence histogram with the stored histogram from the training images. The result is a vote matrix.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Object SegmentationObject Segmentation
From the vote matrix, segmentation windows are contructed.Starting from the global maximum, adjacent rows and columns are added as long as the vote values give sufficient support.
Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Object Segmentation - Results
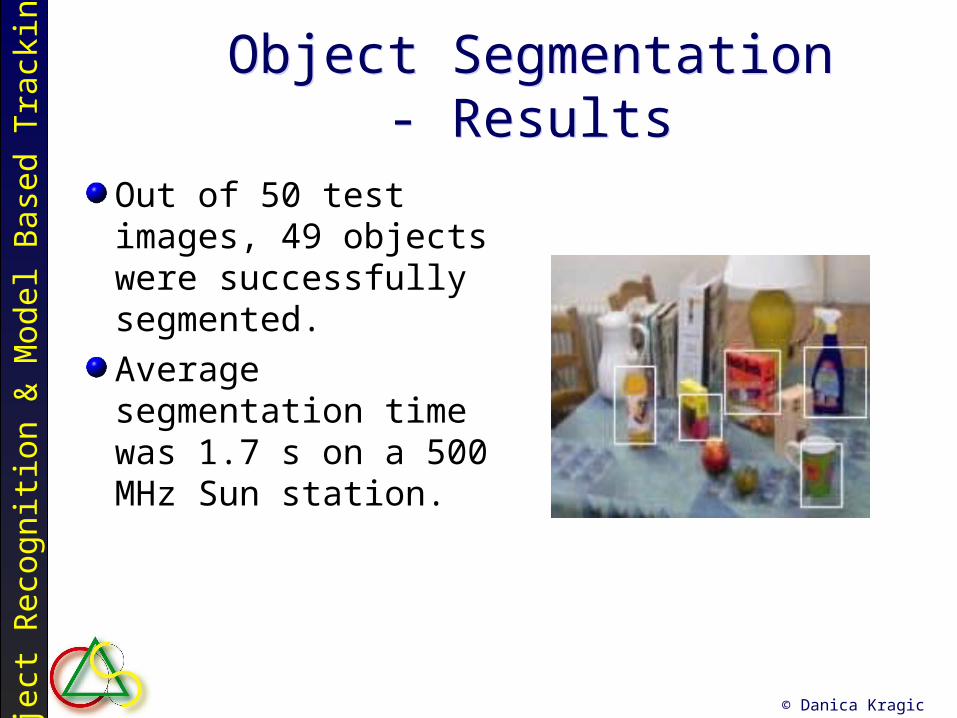
Object Segmentation - Results
Out of 50 test images, 49 objects were successfully segmented. Average segmentation time was 1.7 s on a 500 MHz Sun station.
Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose EstimationPose Estimation
The geometric model based pose estimator requires an initial pose to converge. The initial pose is estimated using color cooccurrence histograms.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose Estimation - Training
Pose Estimation - Training
70 training images were used.The pose of the object varied over the training images.The correct pose of the object in the training image was stored, together with the cooccurrence histogram.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose EstimationPose Estimation
The object with the unknown pose is compared to each of the training examples. The result is a match value graph.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose EstimationPose Estimation
The match value graph is filtered using a Gaussian kernel.Superior method compared to a nearest-neighbor approach.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Initial Pose EstimationInitial Pose Estimation
Appearance based

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Principle Component Analisys
Principle Component Analisys
Learning stage – compressing image set using eigenspace representation PCA PCAPose recognition stage – closest point search on appearance manifold PCAFitting stage – closest line search for pose refinement

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
PCA – i(q)PCA – i(q)
Pose Appearance
Eigenstructure decomposition problem
PCA

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
PCAPCA
Implicit covariance matrix (conjugate gradient method)
PCA

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
PCAPCA
Pose determination
PCA

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Initialization by PCAInitialization by PCA
Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Geometric Model Based Pose Estimation
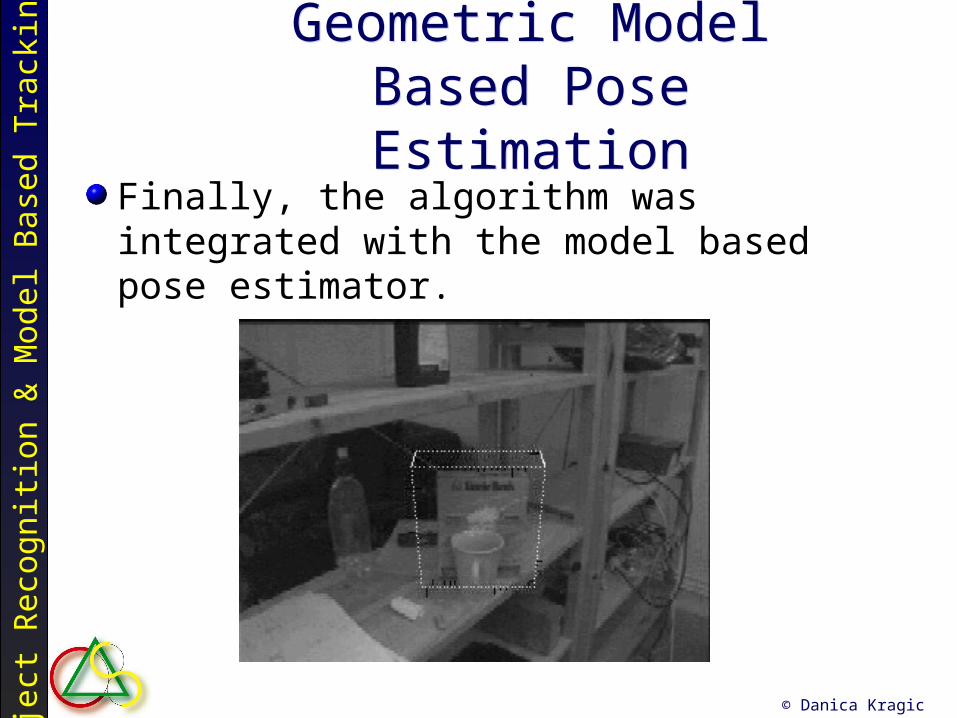
Geometric Model Based Pose Estimation
Finally, the algorithm was integrated with the model based pose estimator.

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Geometric Model Based Pose Estimation
Geometric Model Based Pose Estimation

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Local refinement by tracking
Local refinement by tracking
H = (14 0 60 15 6 5) [mm, deg]

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
ModelingModeling

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
ModelingModeling

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pose estimationPose estimation
DeMenthon and Davis 1995Orthographic projectionIterative methodNo initial guess needed
This step is followed by an extension of Lowe’s nonlinear approach
(Canceroni, Araujo and Brown et al.)

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
TrackingTracking
Lie algebra approach Rigid body motion SE(3) (6D Lie group)
0000000000010010
0000000100000100
0000001001000000
zyxGGG
0000000000010010
0000000100000100
0000001001000000
zyxGGG
0000100000000000
0000000010000000
0000000000001000
zyx ttt GGG
0000100000000000
0000000010000000
0000000000001000
zyx ttt GGG

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Image motionImage motion
with:
L - observed motion in an image point
wvwu
yxandZ
YX
AEwvu
//
1
wvwu
yxandZ
YX
AEwvu
//
1
2
2
1w
wv
w
vw
wu
w
u
yxLandZ
YX
AEGwvu
ii
2
2
1w
wv
w
vw
wu
w
u
yxLandZ
YX
AEGwvu
ii
i

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Normal flowNormal flow

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Rendering exampleRendering example

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
3D pose update3D pose update
The change in pose is estimated using least square approach:
where represents the quantities of Euclidian motion
iiji
p
ppj
ppiij
p
ppi
pi
OC
nLnLC
nLdO
1
))((
)(
iiji
p
ppj
ppiij
p
ppi
pi
OC
nLnLC
nLdO
1
))((
)(
i

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
3D pose update3D pose update
iiGIM iiGIM
)(),(),( 1ii
tt GItRHtRH )(),(),( 1ii
tt GItRHtRH

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
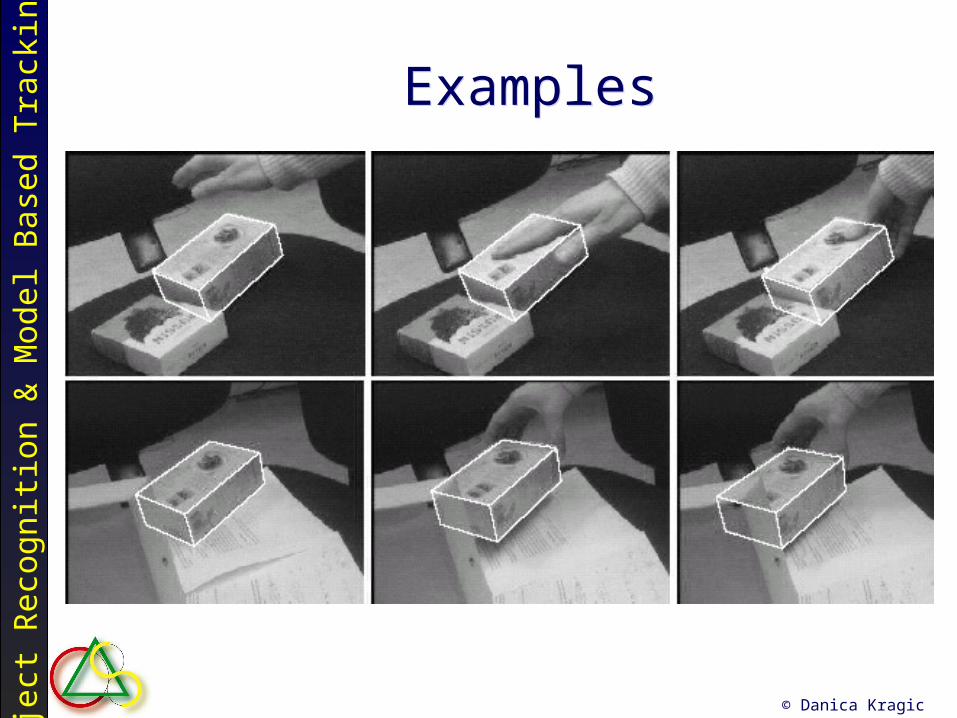
ExamplesExamples
Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
ExamplesExamples

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
ExampleExample

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Task 1 – Align and Track
Task 1 – Align and Track

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Task 1 – Align and Track
Task 1 – Align and Track

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Task 2 – Object Positioning
Task 2 – Object Positioning

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Task 3 - InsertionTask 3 - Insertion

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Insertion taskInsertion task
How much a-priori info can we used?

Ob
ject
Reco
gnit
ion
& M
od
el B
ase
d T
rack
ing
© Danica Kragic
Pick and PlacePick and Place


















