
O ;MhP -ht b Zinoue.s201.xrea.com/dissertation.pdf · `|f g w ÔùtmMo EMO Ow°mpK è $ = $ ... it...
133
九州大学 博士論文 進化的計算手法を用いた建築計画に関する研究 A Study of Architectural Planning Using Evolutionary Computing Methods 2009 年 1 月 井上 誠 Makoto Inoue http://inoue.s201.xrea.com/fs/
Transcript of O ;MhP -ht b Zinoue.s201.xrea.com/dissertation.pdf · `|f g w ÔùtmMo EMO Ow°mpK è $ = $ ... it...

九州大学 博士論文
進化的計算手法を用いた建築計画に関する研究
A Study of Architectural Planning Using Evolutionary Computing Methods
2009年 1月
井上 誠
Makoto Inoue
http://inoue.s201.xrea.com/fs/

概要
集積回路などの小さなスケールから建築・造園,さらには地域や都市までのス
ケールで,それぞれの空間計画分野がある.この場合の空間とはその目的に必要
なモジュール,部屋,建物などを指し,これらをある範囲内にいかに配置,または
範囲を分割することで部分空間を秩序付けるかという問題が空間計画である.こ
の空間計画にはその対象に応じて計画要件や条件が多数あるため,空間計画を人
間が行うには経験や技能,さらにはセンスなどが必要とされている.
本研究の目的は進化的計算(EC)手法を用いて建築計画,主に建築平面(間取
り)計画を行うことに関する提案を行い,その実験と考察によって実際の建築計
画への利用可能性を示すことである.具体的には,ユーザにとって好ましい多様
な空間配置案を提示できる支援システムを構築することで,空間配置計画の未習
熟者であっても利用が可能で,空間配置計画の習熟者であれば業務短縮を可能と
するものを目指している.また,この建築(空間)計画ではその複数の条件に合致
し,ユーザの好みや意図を反映する結果(計画案)を複数提示でき,さらにユーザ
が思いもよらなかったがあり得る結果をも提案できる仕組みを目指すものとする.
計算機を用いて建築計画を行うには,まず空間構成をどのように表現するか,つ
まりモデル化が必要である.それらのモデルの部屋に関する問題点の要約は次の
通りである.部屋間に隙間ができる場合がある.部屋空間の重複がある場合があ
る.部屋の形状が矩形になり難い場合がある.一方,部屋の形状が変化できない,
一定である場合がある.部屋の形状が矩形のみで L字形などのバリエーションが
できない場合がある.部屋の位置が変更できない,一定である場合がある.建築を
はじめとする空間計画分野ではその目的が多数にわたることが一般的である.多
目的を最適化する技術として進化的多目的最適化手法を用いることがあるが,空
間計画分野においてこの進化的多目的最適化手法を用いた研究はそれ程度多くな
い.進化的多目的最適化と対話型進化計算を組み合わせた空間計画支援システム
はまだない.この二つの進化計算手法の有効な組み合わせ方も研究課題の一つで
ある.
進化的計算手法を用いた建築計画(支援)システムは空間配置案生成部と最適
化部からなる.空間配置案生成部は空間生成アルゴリズムと成長ルールを核とし
て建築間取り案を生成し,最終的な最適化部は,要求仕様の多制約下で多目的を
最適化するための進化的多目的最適化(EMO)と,経験・知識・感性など定量化
が困難な目的をも満たす設計のための対話型進化的計算(IEC)からなる.

本研究で行う主な項目は次の通りである.
1. 空間配置案を作成する新しい手法を提案すること.
2. この手法を建築間取り案作成に応用し,作成された間取り案がEC手法によ
る進化的多目的最適化できることを示すこと.
3. さらにユーザの経験,知識及び好みを多目的最適化に組込む枠組み(対話型
進化的計算)を導入し実験・研究をすること.
1番目の空間生成アルゴリズムはセルラ・オートマトンにヒントを得たもので,
その成長プロセスによって必要な部分空間を作成する.また成長ルールによって
その形状をコントロールする仕組みを提案する.提案手法は生成される部分空間
の形,大きさ,位置の制約が少なく,部分空間の間の隙間の大きさが調整できる
ことが特徴である.2番目の進化的多目的最適化は建築計画に必要な 4目的と 6目
的を設定し,それぞれの場合について EMO手法の一つである多目的進化的アル
ゴリズム(MOGA)で生成された建築間取り案が最適化されることを実験的に示
す.また,多様な建築間取り案が生成できるようニッチ手法のEMOへの導入の効
果も評価する.この実験結果は,提案した空間生成アルゴリズムと成長ルールが,
空間計画支援システムに応用できることを裏付ける.3番目のEMOへの IEC手法
の導入検証のために複数の組み合わせの実験を行った.この実験には擬似人間に
よる評価を用いた.次に被験による実験も行った.
本研究で成し遂げた独自性のある事項をまとめると,建築計画のための ECに
よって最適化可能な空間生成アルゴリズム及びそのルールを作成し提案したこと,
今回設定した建築計画問題に合うように EMO(MOGA)を調整したこと,対話
型進化的多目的最適化として EMOに対話型進化的最適化手法の導入を試み,そ
の組み合わせ方について有用な検証を行ったことが上げられる.また今までは空
間計画において制約が伴っていたが,本研究提案のものは空間計画支援システム
に利用可能なレベルに達したと言える.

Abstract
Architectural (spatial) planning problems are how necessary rooms (subspaces) are
arranged within a planning area or how the subspaces are ordered by dividing the
area. The experience, the skill, and the sense, etc. are needed so that planners may
hold the space plan because there are a lot of plan requirements and conditions in
this space plan according to the objects.
The purpose of this research is to propose it concerning the architectural plan, es-
pecially the (room layouts) plans by using Evolutionary Computation (EC) meth-
ods, and the use possibility to actual architectural plans is shown by the experi-
ments and consideration. It is general that the purposes extend to many in the
space plan fields including Architecture. Evolutionary Multi-objective Optimiza-
tion (EMO) methods might be used as a technology that optimizes multi-objective.
However, there is too no research that uses this EMO in the space plan fields. In
addition, there is no spatial planning support system that combines EMO with
Interactive Evolutionary Computation (IEC) yet.
Architectural planning (support) system that uses EC methods of the proposal
consists of the optimization part with spatial layout planning generation part. The
spatial layout planning generation part consists of the space generation algorithm
and the growth rules, generates the architectural room layout plans. The opti-
mization part consists of EMO to optimize multi-objective under restrictions of
specifications, and IEC for planning that fills difficult objectives to quantify like
experience, knowledge, and sensibility, etc...
This research shows a proposal of the new method that makes the spatial layout
plans, the made room layout plans should be able to be optimized by EC methods
by applying this technique to the architectural room plan making, and the spa-
tial generation algorithm and the growth rule proposes by the experiment can be
applied to the spatial planning support system.
The original matter that is accomplished by this research is brought together
as follows. It made and it proposed the spatial generation algorithm and the rule
that were able to be optimized for architectural planning by EC, EMO has been
adjusted to be suitable for the architectural planning problem of setting it this
time, and the introduction of the IEC method was tried to EMO as the interactive

EMO and a useful verification was done about the how to combine. Moreover,
it can be said that the one of this study proposal reached at the level that can
be used for the spatial planning support system though the restriction had been
accompanied in the space plan up to now.

目 次
第 1章 序論 1
1.1 背景と従来の問題点・課題 . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.2 従来の問題点と課題 . . . . . . . . . . . . . . . . . . . . . . 3
1.2 目的とアプローチ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 空間計画支援システムの全体構成 . . . . . . . . . . . . . . . . . . . 7
1.4 章構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
第 2章 関連技術と関連研究 11
2.1 関連技術 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 人工生命 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.2 ボロノイ図 . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.3 進化的多目的最適化 . . . . . . . . . . . . . . . . . . . . . . 13
2.1.4 対話型進化的計算 . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 関連研究 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
第 3章 空間生成アルゴリズム 24
3.1 アルゴリズムの提案 . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1 空間生成アルゴリズム . . . . . . . . . . . . . . . . . . . . . 25
3.1.2 成長ルール . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.1.3 実験で用いた成長アルゴリズムと成長ルール . . . . . . . . . 29
3.1.4 遺伝子コーディング . . . . . . . . . . . . . . . . . . . . . . 30
3.2 空間生成アルゴリズムの実験 . . . . . . . . . . . . . . . . . . . . . 32
3.3 間取り計画への応用 . . . . . . . . . . . . . . . . . . . . . . . . . . 37
第 4章 進化的多目的最適化 39
4.1 最適化部の手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
i

4.2 間取り問題の目的(4部屋の場合) . . . . . . . . . . . . . . . . . . 41
4.3 進化的多目的最適化(4部屋の場合)実験 . . . . . . . . . . . . . . 46
4.3.1 実験条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3.2 評価実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3.3 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4 間取り問題の目的(6部屋と廊下の場合) . . . . . . . . . . . . . . 54
4.5 進化的多目的最適化(6部屋と廊下の場合)実験 . . . . . . . . . . . 57
4.5.1 実験条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.5.2 評価実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.5.3 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
第 5章 対話型進化的多目的最適化 65
5.1 対話型システムの意義と課題 . . . . . . . . . . . . . . . . . . . . . 66
5.2 システム構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2.1 EMOと IECの組み合わせ . . . . . . . . . . . . . . . . . . . 67
5.2.2 擬似人間の設定 . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.3 実験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.4 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
第 6章 建築計画支援システム主観評価実験 85
6.1 実験仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.1.1 目的と概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.1.2 実験の手順 . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.1.3 実験の説明 . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.2 評価実験 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.2.1 各目的値の結果 . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.2.2 アンケート結果 . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.3 考察 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
第 7章 考察と今後の課題 108
第 8章 結言 112
謝辞 115
ii

公表論文 124
付録 125
iii

第1章 序論
1

1.1 背景と従来の問題点・課題
1.1.1 背景
集積回路(図 1.1),電子部品の基板配置,出版物及びウェブページのレイアウ
トデザイン,建築(図 1.2)や庭園の設計,地域及び都市計画などの空間配置案作
成には技能,知識,経験,美的センスや感性などが必要である.また複数の評価
項目を満たすような多目的最適化も多くの空間計画で求められる.さらにこれら
の多目的がお互いにトレードオフの関係にある場合や定性的な場合も多く,その
最適化は容易ではない.そのため空間計画の支援システムが求められている.
空間計画の実務では計画を担当する者が単独であったり計画手法が固定されて
いたりしていては多様な計画案は作成できない.計画者にとって計画条件が多数
であったり複雑過ぎたりする場合は複数の計画案を作成・検討することは出来な
いことも少なくない.さらには 1つの計画案すら導き出すことが出来ない場合も
ある.人間が行う空間計画の手法は,部分から全体を積み上げるボトムアップ型
アプローチ,全体から部分へと流れるウォーターフォール型アプローチとそれら
を繰り返すアプローチが多い.部分空間を変更する場合にその空間に影響される
周辺を調整または変更する必要が出てくることがほとんどであるため,人間の用
いている上記のアプローチでは一から計画をやり直す事も少なくない.これらの
ことからも空間計画支援システムの需要が高い.
図 1.1: VIA Nano Processor[66].
2

図 1.2: スケルトン・インフィル住宅(SI住宅)[28].国土交通省の普及促進す
る集合住宅のあり方で,建物のスケルトン(柱・梁・床等の構造躯体)とインフィ
ル(住戸内の内装・設備等)とを分離した工法による共同住宅.インフィル部分
の個々の計画ニーズが見込まれる.
1.1.2 従来の問題点と課題
(a) 間取り生成
空間配置案作成支援システムを設計するには,まず空間構成をどのように表
現するか,つまりモデル化が必要である.建築間取りの分野でもこれまでい
ろいろなモデルが提案されてきた [43, 44, 45, 48].それらのモデルの部屋に
関する問題点の要約は以下の通りである(詳細は第 2.2節で述べる).なお,
ここでは建築の空間の場合を想定しているため,「部屋」という表現を用いて
いる.建築以外の一般的な空間計画の応用先のためには「部分空間」とする.
1. 部屋間に隙間ができる場合がある.
2. 部屋空間の重複がある場合がある.
3. 部屋の形状が矩形になり難い場合がある.
4. 一方,部屋の形状が変化できない,一定である場合がある.
5. 部屋の形状が矩形のみで L字形などのバリエーションができない場合
がある.
6. 部屋の位置が変更できない,一定である場合がある.
(b) 間取り計画のための多目的
建築をはじめとする空間計画分野ではその目的が多数にわたることが一般的
である.多目的を最適化する技術として進化的多目的最適化手法を用いるこ
3

とがあるが,空間計画分野においてこの進化的多目的最適化手法を用いた研
究はそれ程度多くない.例えば,徳田らは集合住宅配置計画 [64]の,谷垣ら
は一戸建て住宅部屋配置計画 [62]の,各目的に比重を掛け合わせて単目的に
することで最適化を行っている.目的の比重を予め限定することは,トレー
ドオフ関係にある複数の目的の関係性を固定してその優劣を判定することに
なり,また建築の利用者や計画者の意図を計画に反映する可能性を狭めるこ
とにもなる.多目的の関係性を維持しつつ多様な解を導き出すことが課題で
ある.
(c) 定性的要素の最適化
従来の対話型進化計算ではユーザ評価だけで進化計算が進められるのが一般
的である.しかし建築などの空間計画分野では短時間での視覚情報や直感だ
けでは個体の優劣の判断ができない.また計画の専門家であっても計画に必
要な項目のチェック漏れが生じることもある.そこで定量的要素は計算機で
最適化を行い,計算機では難しいと思われる定性的要素を対話型進化計算で
行うといった組合せが有効だと思われる.
進化的多目的最適化と対話型進化計算を組み合わせた空間計画支援システム
はまだない.この二つの進化計算手法の有効な組み合わせ方も研究課題の一
つである.
目的数が 5つ以上のような多数目的の場合,進化計算が途中で進まなくなる
問題も近年指摘されている [23] .その一つの解決策として多数目的の中から
重要なものを選択し進化的計算に用いる「意思決定者の選好 [42]」が提案さ
れている.この意思決定者の選好の一つの仕組みとしての対話型技術利用の
可能性もある.
4

1.2 目的とアプローチ
本研究の目的は進化的計算手法を用いて建築計画,主に建築平面(間取り)計画
を行うことに関する提案を行い,その実験と考察によって実際の建築計画への利
用可能性を示すことである.具体的には,ユーザにとって好ましい多様な空間配
置案を提示できる支援システムを構築することで,空間配置計画の未習熟者であっ
ても利用が可能で,空間配置計画の習熟者であれば業務短縮を可能とするものを
目指している.また,この建築(空間)計画ではその複数の条件に合致し,ユー
ザの好みや意図を反映する結果(計画案)を複数提示でき,さらにユーザが思い
もよらなかったがあり得る結果をも提案できる仕組みを目指すものとする.
本研究の建築計画支援システムは建築計画エスキース段階でのブロック・プラ
ン作成の支援的利用を想定している.そしてその計画対象は集合住宅の一住戸の
間取り計画を例に上げ,計画空間のモジュール化,部屋の形状などを限定するこ
とで最適化の探索空間を制限している.また,間取り成立のための目的も建築計
画的に最小限の一般的なものとしている.
本研究の主な目的を以下にまとめる.
1. 空間配置案を作成する新しい手法を提案すること.特に今まで出来なかった
以下の点を同時に満たすことを目標にする.
(a) 部屋(部分空間)の形状が計画対象に適した,まとまりのあるものが生
成できる.
(b) 部屋の位置,大きさが計画対象に応じた自由度で変化できるものとする.
(c) 計画範囲に無駄な隙間が生じ難いものとする.
(d) 進化的計算(EC)による最適化に適したものとする.
2. この手法を建築間取り案作成に応用し,作成された間取り案がEC手法によ
る多目的最適化(進化的多目的最適化(EMO))できることを示すこと.
3. さらに EMOに対話型進化的計算(IEC)手法を導入し,今までに無かった
ユーザの経験,知識及び好みをも含む多目的最適化システムを構築すること.
本研究のアプローチを次に示す.
5

1. 人工生命にヒントを得て空間配置案生成のためのアルゴリズムとルールを提
案する.
2. その提案のアルゴリズムとルールをプログラミングする.
3. 実験で使用する建築のマンションの一住戸の間取りのための設定をする.
4. 進化計算での目的(多目的)を設定する.
5. 進化的多目的最適化と対話型進化計算を今回の問題に合うように調整し組合
せを検討する.
6. 以上の条件でプログラムを走らせ進化計算実験を行う.
7. 実験の結果得られた間取りと目的値の進化状況を観察及び評価を行う.
6

1.3 空間計画支援システムの全体構成
建築間取り案作成支援システムは空間配置案生成部と最適化部からなる.空間
配置案生成部は第 3章の空間生成アルゴリズムと成長ルールを核として建築間取
り案を生成し,最終的な最適化部は,要求仕様の多制約下で多目的を最適化する
ための進化的多目的最適化(EMO)と,経験・知識・感性など定量化が困難な目
的をも満たす設計のための対話型進化的計算(IEC)[61]からなる.図 1.3はその
全体像を示す.第 3章で述べる空間生成アルゴリズムと成長ルールは建築間取りに
限定されるものではなく,汎用的な空間配置案生成手法であり,図 1.3の構成をほ
とんど変えることなく,他分野の空間配置案生成支援システムとすることができ
る.IECを組み込んだ場合は,生成された間取りをユーザが評価できるよう,間
取り図として可視化する必要がある.図 1.3上半分の空間配置案生成部にはユーザ
へ可視化した間取り図を提示するための間取り図生成部が,下半分の最適化部に
は IECが組み込まれている.
図 1.3: 空間配置案生成部(上部)と最適化部(下部)からなる建築間取り案生成
支援システム.
7

ECによる空間計画支援システムは以下の様に間取り(プラン)を最適化する:
1. 初期個体の染色体を構成する座標は乱数で,または前もって手動で初期化さ
れる.
2. 空間生成アルゴリズムと成長ルールは染色体からそれらに対応する間取り
データを作成する.
3. EMO部で間取りデータの多目的(定量的要素)に対する評価を行い,その
評価に基づき進化的最適化を行う.
4. 間取り図生成部は間取りデータから図(プラン)を作成しグラフィカル・ユー
ザ・インタフェース(GUI)上に表示する.ユーザはそれらを見て評価(定
性的要素を含む)を行い,その評価に基づき EC部で進化的最適化を行う.
5. 統合部では EMO部と EC部の統合を行う.実際には EMO部と EC部は一
体的に遺伝的最適化を行う.
6. 最適化された個体群(染色体)を次世代のものとして 2へ返す.
7. 以上のステップを必要な間取りが得られるまで繰り返すことで間取りを最適
化する.
8

1.4 章構成
図 1.4に章と章の関係を示す.
• 第 1章では序論として,研究の背景とこれに関する問題点と課題,研究の目
的とアプローチについて述べる.
• 第 2章では,本研究に関係する技術と研究についてまとめる.
• 第 3章では,第 1章と第 2章を受けて,空間計画支援システムの空間配置案
生成部を構成する空間生成のための成長アルゴリズムとその成長を制御する
成長ルールを提案する.その空間生成アルゴリズムを用いて空間レイアウト
を作成しその特徴を述べる.
• 第 4章では,第 3章で得られた建築間取り案を進化的手法で最適化する最適
化部について述べ,進化的多目的最適化(EMO)による建築間取り案の最
適化を実験的に評価する.具体的には集合住宅の 1つの住戸内に部屋を配置
する問題を扱う.4部屋を計画する場合と 6部屋及び住戸内廊下を計画する
場合の 2種類の実験を行う.
• 第 5章では,対話型進化計算(IEC)を EMOに組入れた手法による建築間
取り案の最適化を実験的に評価する.擬似人間を用いた実験によって IECと
EMO組み合わせ方について検討を行う.ここでは 6部屋と住戸内廊下の最
適化を行う.
• 第 6章では,IECをEMOに組入れた手法による建築間取り案の最適化を被
験者実験により評価する.ここでは 4部屋の計画を行う.
• 第 7章では研究全体と特に第 4章,第 5章及び第 6章で行った実験とその結
果に対する考察と今後の課題に付いて述べる.
• 第 8章では結言を述べる.
9

図 1.4: 章構成.
10

第2章 関連技術と関連研究
11

2.1 関連技術
2.1.1 人工生命
最近ではロボットのような物理的な形を持った動的な機械を指す場合もあるが,
一般にコンピュータ内でアルゴリズムによって動的に変化する個体あるいは個体
群を指す.人工生命の代表的な仕組みの 1つにセルラ・オートマトンがある.一
定間隔に並んだ細胞状の自動機械のことで,決められた隣接関係などのルールに
よって時系列に変化していく仕組みである.生物が生長,進化する過程をモデル
化している.そのルールは単純なものであっても結果は時間経過と共複雑なもの
となることを利用する [60].本研究の空間生成アルゴリズムは一部この原理にヒン
トを得て,成長プロセスを導入している.人工生命が常に動的に変化するものが
多い一方,本論文で提案の成長アルゴリズムは成長の限界を設けており,その時
点で空間の生成を完了するものとしている.
2.1.2 ボロノイ図
前節で本論文提案の空間生成アルゴリズムが人工生命の概念を一部導入してい
ると述べた.人工生命は時系列変化や成長プロセスを含んでいる.一方,ボロノ
イ図は一般に母点からの距離を基にその部分空間を決定しているが,同時に成長
プロセスによる部分空間の生成の特徴も持っている.本論文で提案しているシス
テムでの生成した空間計画案を観察すると各空間の成長の始点を中心とした空間
となっていることが解る.この視点で提案のアルゴリズムを解釈した時に計算幾
何学分野で扱われているボロノイ図 [1, 50, 51]に該当することが理解できる.詳
細は第 3.1.1節で述べる.点 pと点 pnとの間のユークリッド距離を d(p,pn)とする
と点 piのボロノイ領域 V (pi)は式 2.1と図 2.1で表される [51].一般にボロノイ図
は空間の分析やデータ圧縮技術に用いられる.空間計画に用いることはほとんど
ない.特許検索で大規模集積回路(VLSI)のモジュールの位置決定に用いるもの
はあったが,ボロノイ領域をモジュール空間そのものとして用いてはいない.よっ
て本論文提案の空間生成アルゴリズムに独自性の可能性がある.
V (pi) = {p|d(p, pi)≦ d(p, pj), j≠ i} (2.1)
12

図 2.1: ボロノイ図
2.1.3 進化的多目的最適化
EMOの概要
進化的計算(EC)[14, 27, 60]では単目的を最適化するものが一般的であった.
しかし近年は多目的の最適化を目標とする進化的多目的最適化(EMO)の研究が
進んできている.特に工学や計画設計分野における問題の最適化への EC応用を
目標とした場合,その分野での問題は目的が複数存在するものがほとんどである
ため,ECを用いて最適化を行う必要があればEMO手法を導入することは必然だ
と言える.
EMOの手法
具体的なEMOの手法は様々に提案されている [5, 55].その初期である 1985年
には非パレート・アプローチによるVector Evaluated Genetic Algorithm(VEGA)
[57]が Schafferによって提案された.次にパレート・アプローチによる手法とし
てGoldbergによる非劣勢ソーティング [13]が,FonsecaらによるMulti-Objective
Genetic Algorithm(MOGA)[7]が提案された.それ以後様々な手法が提案され
ている [4, 52].その多くがパレート・ランキングを基にして適応度を求め,遺伝
的操作を行うための個体選択に利用している.近年では Non-dominated Sorting
Genetic Algorithm-II ( NSGA-II ) [6]が良く用いられる EMO手法である.
本研究ではEMOの手法の内MOGAを使用した.本研究でもEMO部でMOGA
13

を使用しているが,それはMOGAが離散値問題にも対応できることやニッチング
が導入できること [5],進化的多目的最適化の研究を始めるにあたってまずはその
体表的な手法で行いたいということが選択の理由である.
パレート・アプローチ
MOGAはパレート・アプローチによるEMOアルゴリズムである.ここではEC
での選択過程における適応度の根拠にパレート最適性によるランクを用いること
をパレートアプローチとしている.パレート最適性とはイタリアの経済学者,社
会学者であるVilfredo Federico Damaso Pareto(1848-1923)が提唱したもので,複
数の目的を持つ事項の優劣関係を求める概念である.多目的を重み付けし単目的
に変換する方法もあるが,これでは優劣判断において多目的のトレードオフ関係
を考慮したことにならない.
パレート最適解
多目的計画において,目的関数を f1, ..., fp,実行可能集合をXとするとき,
fi(x) ≤ fi(x∗) ∀i = 1, ..., p (2.2)
fi(x) < fi(x∗) ∃i ∈ {1, ..., p} (2.3)
が成り立つ x∗ ∈ X のことをパレート最適解,または非劣解と呼ぶ [46].
パレート・ランキング
FonsecaらのMOGAの場合,個体 iのパレート・ランク riは,i番目の個体の
は全ての目的に関して優越されている比較対象個体が ni個とすると式 2.4,図 2.2
で表される.
ri = 1 + ni (2.4)
14

図 2.2: Fonsecaらによるパレート・ランキング法 [7].点A~Hは個体を,丸括弧
内の数字はその個体のパレート・ランクを表す.ここでは目的関数値 f1,f2が最
大となるほど最良としている.
一般に多目的最適化では一つの最適解を求めるのではなく,多様なパレート最
適解を求めることが目標とされている.EMOによって得られた多様な解を案とし
てユーザに提示することが本研究システムの目的である.それを最終的な解とし
て絞り込むことは計画における次のステップである.
MOGAの適応度
MOGAは解の多様性を保持するための手法であるニッチングが導入されている.
まずは個体 iと個体 j との目的関数値空間での距離 dij を式 2.5で求める.なお,
fmaxk ,fmin
k は個体 kの目的関数値の最大値と最小値とする.なお,本研究では目
的関数値空間ではなく個体の表現型である間取りにおいて個体間距離 dijを求めて
いる(第 4.3.1節参照).
dij =
√√√√ M∑k=1
(f
(i)k − f
(j)k
fmaxk − fmin
k
)2 (2.5)
個体 iからの範囲(σshare)を指定し,比較対象である個体 kがその範囲内に存
在する場合にその距離 dikに応じて 0から 1を割り当てる関数をシェアリング関数
15
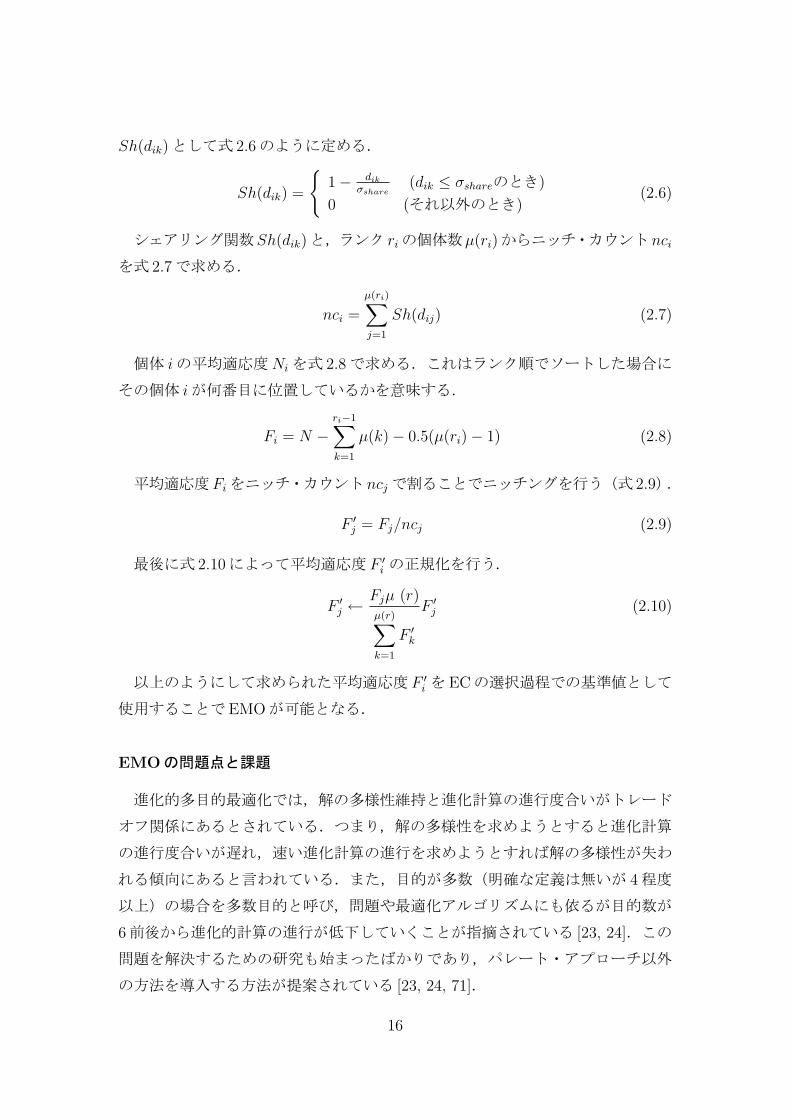
Sh(dik)として式 2.6のように定める.
Sh(dik) =
{1− dik
σshare (dik ≤ σshareのとき)
0 (それ以外のとき)(2.6)
シェアリング関数Sh(dik)と,ランク riの個体数µ(ri)からニッチ・カウント nci
を式 2.7で求める.
nci =
µ(ri)∑j=1
Sh(dij) (2.7)
個体 iの平均適応度Niを式 2.8で求める.これはランク順でソートした場合に
その個体 iが何番目に位置しているかを意味する.
Fi = N −ri−1∑k=1
µ(k)− 0.5(µ(ri)− 1) (2.8)
平均適応度Fiをニッチ・カウント ncjで割ることでニッチングを行う(式 2.9).
F ′j = Fj/ncj (2.9)
最後に式 2.10によって平均適応度 F ′i の正規化を行う.
F ′j ←
Fjµ (r)µ(r)∑k=1
F ′k
F ′j (2.10)
以上のようにして求められた平均適応度 F ′i をECの選択過程での基準値として
使用することで EMOが可能となる.
EMOの問題点と課題
進化的多目的最適化では,解の多様性維持と進化計算の進行度合いがトレード
オフ関係にあるとされている.つまり,解の多様性を求めようとすると進化計算
の進行度合いが遅れ,速い進化計算の進行を求めようとすれば解の多様性が失わ
れる傾向にあると言われている.また,目的が多数(明確な定義は無いが 4程度
以上)の場合を多数目的と呼び,問題や最適化アルゴリズムにも依るが目的数が
6前後から進化的計算の進行が低下していくことが指摘されている [23, 24].この
問題を解決するための研究も始まったばかりであり,パレート・アプローチ以外
の方法を導入する方法が提案されている [23, 24, 71].
16

2.1.4 対話型進化的計算
一般的な進化的計算では個体の適応度を基に遺伝的操作を行う個体の選択を行
う.予め設定した目的関数によって個体の適応度が求められる.一方,対話型進化
的計算ではユーザが個体の表現型を見て評価を行い,その値を基に個体の適応度
とする.よって対話型進化的計算では予め目的関数を設定する必要が無く,目的関
数を設定することが困難な問題を最適化するのに向いている.美的要素,ユーザの
好みや経験などの定性的要素に関して最適化が出来るため,デザインや工学分野
での利用が想定できる [60, 61].対話型進化的計算システムを図 2.3に示す.ユー
ザが評価対象を見聞きし,ユーザの好み,知見,知識を基に主観的または予め設
定した目的関数値を含めて総合的に評価し,個体毎に評価点を決める.評価は 10
段階,5段階,2段階など様々なものがある.それらの評価値をECの「評価」で
の適応度(フィットネス)として用いることで対象の最適化を行う.
図 2.3: 対話型進化的計算システム
人間が評価を行うため,疲労などを考慮すると評価する個体数や回数が限られ
る.また,評価にばらつきがあり安定性もないため,一般にその評価にはノイズ
が含まれている.設定を変えた複数の評価実験を行う際にはその実験ケースの順
序が評価に大きく影響するなどの問題もある.
17

2.2 関連研究
この節では本研究に関連する研究のサーベイを行い,本研究との類似点と相違
点を述べる.また,これを受けて最後には本研究の独自性を提示する.
独立した空間や物の配置計画
本研究は「空間」計画を行う.空間計画とは部分空間(例えば部屋など)を計
画範囲に配置する,言い換えれば計画範囲を分割することになる.空間計画では
そのほとんどの場合,部分空間が重なることや部分空間の間に隙間ができること
を避けることが要求される.
一方,独立した空間や物の場合は計画範囲にいくつかの物をその位置と方向を変
えて配置することを目的とするものが多い.それらの物が重ならない限り,物と物
との間に隙間があっても,計画案として成立する.そのため空間計画と比べて計画
案の生成が容易である.例えば,室内での家具の配置を最適化する研究 [12, 16, 37]
がそれにあたる.また,独立した空間の配置計画では,[19]が対話型遺伝的アルゴ
リズムによって定形のカード(矩形)のレイアウトを,[33]が有向グラフと対話型
遺伝子アルゴリズムを用いて大きさが可変の矩形の位置を決定する研究を行って
いる.
ビン・パッキング問題
本研究で扱う空間計画に似た問題としてビン・パッキング問題 [67, 68]やパレタ
イジング問題 [63]が上げられるが,ビン・パッキング問題の目的はできるだけ隙
間を少なくし多くの物を詰め込むことである.この問題は物の向きと位置の最適
化を行う.詰め込む物の大きさと形状が固定される点が本論文で扱う問題にない
制約である.
対角2座標を設計パラメータとするモデル
上述の空間配置案作成の研究以外に,矩形の部屋の対角 2座標を設計パラメー
タとするモデル化も容易に考えられる [22](図 2.4).しかし,この方法では部屋
同士の部分重複や部屋間の隙間が生じやすい.それらのような間取りとして成立
しない個体は進化的計算(EC)において評価することができない.また,作成で
18

きる部屋形状が矩形に限られることも間取りの多様性が限られるため不利である.
図 2.4: 対角 2座標によるアプローチを使用して作られた間取り例.例えば,居間
(L,黄色)の形と位置は点L1と点L2によって決定される.この方法は部屋の重
なりや部屋間の隙間が生じやすい傾向を持っている.
空間二分割によるフロア・プランニング
空間二分割の繰り返しによる方法 [38]で生成できる部屋の形状は矩形のみであ
るため,この手法で生成できる空間案数は他の手法と比べて比較的少ないものと
なる.この研究は寸法を持った空間計画を狙ったものではなく計算幾何学的研究
であるため,部分空間の大きさを定義する事は行っていない.現実の空間を計画
するためにはそれらの情報も別に付加する必要がある.
グラフを用いた室配置
各部分空間をグラフのノード,部分空間の繋がりをグラフのパスと見立てるこ
とで,グラフを用いた空間構成の分析手法に関する研究が古くから多数存在する
[15, 43, 44, 48].しかし,グラフはトポグラフィー,つまり空間を抽象化して捉え
ているため建築の間取りのような現実の2次元や3次元の空間を直接的に表現し
ているわけではない.そのためグラフを用いて空間の計画を行うことは一般に困
難であると言える.
そこで [35]は直交グラフを用いることでグラフでも室配置を表現している.直
交グラフでは,部屋の境界となる壁をグラフの辺,壁の交点をグラフの点として
19

平面グラフを構成し,各点の座標によって部屋の寸法が決定される.この論文で
は進化的計算手法ではなく希求水準法 [42]を用いた多目的最適化によって直交グ
ラフを決定し,その室配置を設計者が直接的にグラフの角点を修正する「対話型」
の繰り返しによって室配置の最適化を行っている点も本論文とは大きく異なる点
である.[10]は矩形双対グラフを用いて区画配置の最適化を行っている.矩形双
対グラフは,矩形領域の配置問題において各配置要素間の隣接関係を効率的に扱
うためにKozminskiら [30]によって導入された方法である.計画範囲を隙間無く
区画することが出来るが,生成される部分空間は矩形のみでその大きさも制限さ
れる.
Lシステム(木構造)による間取り計画
玄関を根として各部屋の関係性を記述した木と各部屋に該当する矩形空間を準
備し,その木の関係性に従って玄関から順に計画範囲に部屋を配置していく.こ
の方法では各部屋の関係性や動線に問題がない間取りが生成できる.一方でそれ
以外の間取りは生成できない.また部屋の形状も予め準備したものに限定される.
設計資産(データベース)よるプラン作成
[31]は過去の設計事例(設計資産)による設計事例データベースから概念設計
(空間の接続関係)を検索し,それを基に基本設計を行う.次に室面積データベー
スから各室の面積を割当て最終的な平面プランを得ている.設計資産(データベー
ス)を利用するため室接続関係が良好なプランが得られるが,各室に面積を与える
段階で室接続関係が失われる場合があること,部屋形状は矩形のみであること,計
画する敷地の形状も単純なもののみに限定されること等,解決すべき課題がある.
独立建築計画最適化
セルの成長によって部屋空間を作成し,独立住宅の間取りを最適化する研究 [62]
は,本研究に最も近い研究と言える.異なる点はまずセルの増殖ルールを 1方向
ずつ遺伝子で指定していることである.本研究のような基点(種)の位置関係で
空間の境界を決定するものではないため,部屋形状のまとまりが不利であり,ま
た部屋間に隙間ができることなどの課題がある.次に最適化する部分が室形状最
20

適化と動線・室配置最適化の多重ループの構造になっている.最適化する部分が
二重になっていることで,一方の最適化が進んだとしても,もう一方に変化があ
ればその最適化が意味をなさないことなる.目的の評価関数の設定では本研究と
共通する点が多いが,最適化においてはパレート・アプローチによる多目的最適
化ではなく複数の目的を単目的に統合した評価関数を用いている点が異なる.
[54]はゾーニング配列→クラスター配列→室配列と言う風に空間の大きさを段
階的に小さくし計画していくことで,建物全体の形状がまとまりやすく,部屋間
の関係性も保ちながら間取りの計画を可能にしている.これにより実用的な間取
り案が作成できている.しかし空間の形状は目標面積に合致する矩形パターンの
組み合わせである.そのために部屋間に隙間が出来ることがあり,その場合の隙
間は廊下として利用するなどの調整を設計者が手動で行うようである.各段階で
計画範囲に部分空間をパッキングできるかの全数探索検索を行い,条件に合致す
るかをチェックしている.全数探索を行っているため条件によっては高い計算コス
トを必要とし,条件を厳しくすれば計算コストを抑えることは出来るが得られる
間取りのパターンが限定されるというジレンマが存在する.また,矩形以外の平
面の部屋が出来ない.このシステムは設計支援システムであるので最終建築計画
(間取り)案の作成には設計者が空間の調整を行っている.
[59]は,各階の平面を 3×3の室ユニットとし,3次元室配置システムによって 3
階建て住宅計画を行っている.ユニット数を限定したことで計画のバリエーショ
ンは限られるが,複数階の計画を目標にした点を今後の研究の参考にしたい.
独立建築(病院)の平面計画の研究 [21]では,部屋を定形としてその配置のみ
によって計画を行うため,部屋の形状を自由に変化することができないという制
約がある.
[25]は,正方形のセルをモジュールとし,そのセルを複数用いて部屋とする.セ
ルの成長に関する染色体は成長進行方向の組で構成される.オフィスとすること
が出来る部分を限定し,その範囲を分割することで計画を行っている.
集合住宅(配置)計画最適化
[64]では計画範囲をグリッド状に切り,集合住宅の 1住戸を 1つのセルに割り当
てている.集合住宅全体の形状をまとめる仕組みが無いままでセルを独立した状
態で住戸を割り当てると探索空間が広くなりすぎると思われる.そのため集合住
宅全体の形状がまとまり難いために,一般的に利用できるような計画案が得られ
21

ていないようである.[20]も集合住宅の 1住戸を 1つのセルに割り当て,各セルの
ポテンシャルをリカレントな関数として設定,最適化することで集合住宅の計画
を行っている.
[53]の研究では,正方形のセルをモジュールとし,そのセルを複数用いて部屋と
する.遺伝子型は開始点からセルの辺の進行方向とその距離で構成され,長方形
以外の自由な記述が可能である.最適化はECを用いている.セルの一辺を隣接す
る部屋との出入り口として接続することで間取り全体を構成する.よって間取り
の中に隙間が出来易く,間取りの輪郭,つまり建物全体の形状も矩形にまとまり
難い.敷地に余裕のある独立住宅の計画であれば問題はないであろう.
多目的土地利用計画
[34]は多目的土地利用計画への遺伝的アルゴリズムの応用を行っている.建築計
画とは対象のスケールが異なる点や空間の形状は変えずにある一定のエリアの利
用を割り当てる点が本研究とは大きく異なる.
大規模集積回路のフロア・プラン問題
大規模集積回路(VLSI,または LSI)のフロア・プランニングも盛んに行われ
ている研究テーマのひとつである.
[41]は通常のビン・パッキング問題と同様の方法,つまり水平・垂直制約グラフ
を用いて部分空間の位置を決定し,矩形空間を計画範囲内にパッキングしている.
よって作成できる部分空間の形状は矩形のみで計画範囲内に隙間も生じる.[49]は,
最初に計画範囲を定めず,一定の条件下で必要なモジュールをプランニングする.
よって空間全体の形状は一定でなく,その中にデッドスペースも生じる.[58]では,
初期配置,自由空間バランス,コンパクション,形状変更,配線領域割当,アス
ペクト比調整の順にフロア・プランを行う.これも作成できる部分空間の形状は
矩形のみで計画範囲内に隙間も生じる.[65]は必要な回路モジュールを矩形で配置
するのではなくフレキシブルに変形させて配置することで LSI全体をコンパクト
化している.
建築計画とは目的,条件,スケールなどが異なるが,必要な部分空間を目的に
合わせ,かつ無駄な空間を最小化しながら配置する点など共通する事項が多い.
22

EMOへの IECの導入
[26]ではEMOと IECとを組合せてECを行うことでユーザ評価に伴う疲労軽減
について実験・研究を行っている.[3]では実験のタスクとしてフロア・プランを
取り上げているが,各部屋の2方向の寸法を最適化しているだけであり,部屋の
位置は一定である.研究の目的は多目的対話型遺伝的アルゴリズム(多目的 IGA)
とパラレル対話型遺伝的アルゴリズム(パラレル IGA)等の提案と評価であり,部
屋の最適化問題ではない.[56]は多目的フィットネス値空間上で参照点をユーザが
指定することによる「対話型」によって進化的多目的最適化の探索を有効に行う
という試みである.本研究は表現型(計画案)に対する評価を「対話型」として
いる点で異なる.[2]は 80,160,240,400,560,800世代で個体の表現型と目的
値を表示し対話型プロセスをGAに割り込ませることで航空機設計を行っている.
本研究の独自性(まとめ)
• 部屋(部分空間)の形状が計画対象に適した,まとまりのあるものが生成できる.
• 部屋の位置,大きさが計画対象に応じた自由度で変化できるものとする.
• 計画範囲に無駄な隙間が生じ難いものとする.
• 間取りの現実性と自由度をもった多様性の両方を求める.
• 空間計画を進化的多目的最適化する.
• 対話型進化的計算を導入することにより,予め設定した定性的要素以外のユーザの持つ定性的要素も最適化する.
23

第3章 空間生成アルゴリズム
24

3.1 アルゴリズムの提案
3.1.1 空間生成アルゴリズム
第 1章で述べたこれまでの研究では困難であった以下の 2点を目指した空間生
成アルゴリズムを提案する.
1. 計画する部屋の大きさ,形状,位置が可変
2. 無駄な隙間が少ない
空間二分割の繰り返しでは隙間無く計画範囲を分割できるが,部分空間の形状
は矩形に限定される [38].矩形のみの間取りではパターン数が少なく,建築計画に
は不十分である.そのため本研究では成長アルゴリズムによる空間分割を提案し
ている.直線以外の線分で計画範囲を分割すれば,矩形以外の形状の部分空間が
隙間無く計画できる可能性はあるが,提案の成長アルゴリズムより複雑なアルゴ
リズムと遺伝子コーディングとなることが予想される.成長アルゴリズムはその
仕組みや染色体がシンプルでスキーマも ECにも適していると考える.
次にアルゴリズムの概略を述べる.まず,各部分空間(本論文の場合は部屋)の
成長開始座標点である「種」を計画範囲空間に配置する.次に,種から近い距離
の点(本論文の場合はセル)の集合をその種の部分空間とする.距離の定義とそ
の測定ルール,及び種座標を制御することで空間配置案生成を行う.
建築間取り案生成に応用する空間生成アルゴリズムを以下に示す.ここでの空
間は離散化されたセルで構成されているものとし,座標と距離はこのセルで表わ
す.種座標からの距離に基づいて部分空間を徐々に形成することを,本論文では
「成長」と表現している.
1. 各部屋の成長開始点(種)をm×nセル上へランダムにあるいは知見に基づ
いて初期配置する.
2. 各部屋を隣接セルへ成長させる.
3. 成長方向に他の部屋や壁などの障害物がある場合はその方向へは成長しない.
4. 上記 2と 3を成長できなくなるまで反復する.
25

このアルゴリズムは,セルラ・オートマトンにヒントを得たものである.
この空間生成アルゴリズムを部屋の間取り作成支援システムへ応用する場合,部
分空間が部屋に,全体空間が居住空間になる.図 3.1はアルゴリズムに基づいた部
分空間の成長過程の概要を示す.
図 3.1: 提案アルゴリズムに基づく建築間取りの成長過程の例.成長の順序は上段
の左から右へ,そして下段の左から右へと進む.L,K,W,Bは居間,台所,水
廻り,寝室を表す.
提案の空間生成アルゴリズムを今後改良していくための理論的背景として,ボロ
ノイ図との類似性の視点から提案アルゴリズムを解釈することが有用であると思
われる.本アルゴリズムで形成される部分空間は種座標に支配されるので,離散ボ
ロノイ図,長方形ボロノイ図 [51]に近い性質を持っている.ボロノイ図も growth
modelによる解釈が可能 [51]であり,本空間生成アルゴリズムの各部屋(空間)を
逐次的に成長させることは,このボロノイ図の性質に矛盾するものではない.
ボロノイ図は母点からの距離によってボロノイ領域を定義するため,その領域
形状は距離の定義に依存する [51].今後の展開として逐次成長ではなく,ボロノイ
図のアルゴリズムで間取りを一括生成する場合は,ボロノイ図の視点から生成形
26

状が解析できる.例えば,市街地距離を用いれば部分空間の境界線は水平・垂直
だけでなく 45 度や 135 度などのものにすることができ,Karlsruhe距離を用いれ
ば部分空間の境界線はある中心から出る放射線と円弧の組合せにすることができ
る.更には線ボロノイ図などを使用することも考えられる.
また,逐次成長させる本空間生成アルゴリズムでの成長速度は,ボロノイ図で
の距離に対応すると考えられる.例えば,本論文の実験で行ったような一律の成
長速度はメッシュ空間の市街地距離に相当すると考えられる.種座標間の距離に
応じて,あるいは,他から成長して来る生成空間との隙間距離に応じて成長速度
を制御するなど,将来複雑な成長ルールを導入した場合でも,対応するボロノイ
図の距離の観点から考察することで生成される空間形状が理論的に解析できる可
能性がある.
母点からの距離で支配空間を決定するボロノイ図は,計画範囲を隙間無く,部
分空間の位置,大きさ,形状を,計画対象に適した範囲で,自由に計画できる.こ
れは成長アルゴリズムの特徴に酷似し,同位であるといえる.そのため研究の今
後の発展のためにもこの件について記述した.
3.1.2 成長ルール
第 3.1節の空間生成アルゴリズムの枠組みの下で,部分空間の成長形成方法(成
長の方向,順序,成長量,他の部分空間との衝突時の成長制限方法など)を記述
したものが成長ルールある.前節の空間生成アルゴリズムがいろいろな分野の空
間配置問題に対する1つの共通思想を定義しているのに対し,成長ルールは空間
配置の応用問題毎に,部分空間の成長形成の方法を設計しておく点が異なる.
距離定義と種座標からの距離計測方法によっていろいろな部分空間形状が形成
できる他,成長方法や他部分空間との衝突対処法でいろいろな形状生成が可能に
なる.
成長方法には,例えば次のような例が考えられる.
• 4方向のうち n (=1, 2, 3, or 4)方向ずつ順に成長させる場合,
• 斜めセル方向に成長させる場合とさせない場合,
• 各部分空間が同時成長する場合と順に成長する場合,
• 成長速度が全部分空間で同じ場合と部分空間毎に異なる場合,
27

• 成長速度が全ての成長方向で同じ場合と方向毎に異なる場合,など.
また成長してくる他の部分空間に接した時の対応にもいろいろな対処処理が考
えられる.大別すれば,
• 成長方向に障害物がないセルのみ成長を続ける場合(図 3.2左),
• 上下左右の成長方向の内2つの合成方向つまり角方向を含む一部分でも障害物がある時にはその方向の成長を全ての部分空間のセルについて止める場合
(図 3.2中央),
• 上下左右の成長方向の内2つの合成方向つまり角方向に障害物があり,その2方向のどちらかに障害物がない時に,その一方のみの方向に成長する場合
(図 3.2右)
などの処理が考えられる.この処理によって部分空間の間に隙間が生じること,部
分空間が正方形や長方形以外の不整形状になるなどの現象がそれぞれ生じる.
図 3.2: 同じ種と異なるルールによる間取り生成例.
このように成長ルールによって空間配置結果が異なるため,計画分野や要求仕
様によって成長ルールを調整したり修正したりする必要がある.建築間取り案作成
の場合の一般的な要求仕様では,生成する空間は矩形を基本とし,その一部が欠け
た L字形や十字形などの形状までにしたいと言うものが考えられるが,成長ルー
ルはそれらの部屋形状が生成可能となるように調整及び修正をする必要がある.
以上を踏まえ,本論文での建築間取り案作成で用いる成長ルールを次のように
設定する.
28

• 各部屋は同時ではなく順に成長する.
• 各部屋の成長方向について,
– 上下左右成長方向の各々の隣接セルに障害物や他の部屋がなければ,そ
の方向へ成長できる.
– 障害物や他の部屋がある場合はその方向への成長をここで終える.
– 既に成長した隣接する上下左右方向の合成方向である斜め方向につい
て,もし障害物や他の部屋がなければ,成長する.
成長に順序があることについて,成長が同時であれば部分空間の成長に衝突が
生じる場合が生じる.この衝突の回避のためにはどちらの部分空間をそこへ成長
させるかの「優先順位」を決める必要が出てくるが,今回採用している成長順序
がその優先順位と同位であるとも言える.次に,成長順序をランダムにしなかっ
たのは,一つの染色体が常に一つの間取りを生成するという対応関係を重視した
ためである.なお,成長順序を染色体に組み込むことは発展研究として可能性が
あると考えている.
3.1.3 実験で用いた成長アルゴリズムと成長ルール
実験で用いた成長アルゴリズムと成長ルールのProblem Analysis Diagram(PAD)
[11]を図 3.3で示す.本研究は主に建築の部屋を目標にしているため,部屋の形状
が矩形(正方形,長方形)を基本とし,計画範囲に隙間が出来にくくするために
矩形の角が欠けた L字形や凸形などまでを許容するものとして成長ルールを決定
している.上下左右ごとに方向フラグを設定し,成長方向ごとに1つでも障害物
に当たればその方向の成長を止めることにしている.このことで部屋の境界線が
ジグザグにならず部屋の形状が矩形になりやすくなる.斜め方向(角)を上下左
右方向と分けて処理することによって矩形以外の形状を作ることができる.
29

図 3.3: 実験で用いた成長アルゴリズムと成長ルールの PAD.
3.1.4 遺伝子コーディング
本研究ではEMOによって間取りの最適化を行うため,各部屋(部分空間)の種座
標の集まりを染色体と定義する.例えば,図3.1左上の染色体は [(6,5),(3,7),(2,3),(8,7)]
のように表現される.なお,図の左上を原点とし,下方向の座標,右方向の座標の
順に部屋数分の座標組を記述している.染色体と間取りとの関係を図 3.4に示す.
成長アルゴリズムと成長ルールが一つの染色体から一つの間取りを生成する.
30

図 3.4: 染色体と間取りとの関係図.
31

3.2 空間生成アルゴリズムの実験
各部屋の種座標をランダムに生成し,提案アルゴリズムと成長ルールで部屋を
成長させて得られた間取りの特性を観察する [22].これは図 1.3の空間配置案生成
部(上部)出力であり,まだ最適化部処理は行われていない.提案のアルゴリズ
ムと成長ルールが間取りを生成できるかを確認することがここでの目的である.
観察によると,生成される部屋の形状は基本的に長方形や正方形であり,さら
に L字形,凸形,十字形などの四角形の角の一部が欠けた形状の部屋も作成でき
る(図 3.5).
図 3.5: 生成された様々な形の部屋の例(最適化前).
間取りにはそれほど大きな隙間を作ることがない.隙間ができる場合でも,幅
1m程度に留まっている(図 3.6).止まってしまった成長方向には再度成長しない
という成長ルールによってこの隙間は生じている.
隙間の生じる頻度は少なくサイズも小さいので,建築計画支援システムには問
題のないレベルである.さらに必要であれば成長過程終了後に隙間を埋めるプロ
セスを導入することも可能であろう.
32

図 3.6: 部屋間に生じた隙間の例.
部屋座標(種)の重なりがある場合,間取りにおいて現れない部屋が生じる(図
3.7).必要な部屋数を確保するためには,部屋の成長開始点(種)座標の生成時
にシステムは部屋座標の重なりの有無を確認する必要がある.部屋形状が L字形
の場合,建築計画的に見て細く長くなりすぎることがある(図 3.1の右下).これ
を回避するためには,あるステップで成長を止める必要がある.
図 3.7: 種座標が同じ(重なる)場合は必要な部屋数 nが生成されない.この例で
は水廻り(W)と台所(K)が重なっているため,台所が間取りには現れていない.
本空間生成アルゴリズムと成長ルールでは,長方形の単純な組み合わせの間取
り,他の部屋で囲まれた島状態で計画範囲の端の障害物に接していない部屋を持
つ間取り,L字形の部屋を持つ間取りも生成できる(図 3.8).しかし“「」”のよ
うな L字形の向かい合った組み合わせは生成できない [22].
33

図 3.8: 正方形や長方形の部屋で構成される間取りの例(左と中央)と計画範囲の
境界に接しない島状の部屋がある間取りの例(右).
空間配置案生成部には,間取り案を制御する 3つの要因,つまり部屋種座標の初
期値,成長順序及び成長速度がある.部屋種座標の初期値は,部屋の配置と位置
決定において支配的な要因である.また部屋の種の位置関係が部屋の大きさを決
定している(図 3.9).どの部屋から成長させるかの成長順序も生成間取り案に影
響を及ぼす.今回の間取りの基本設定で,間取りの最小単位であるセルは 1m単位
の離散データである.そのため種の間のセル数が奇数である場合は,当然このシ
ステムはその中央(セルの中)に境界線を引くことが出できない.この場合どち
らか一方の部屋がそのセルを埋めることになる.そこで複数の部屋の間には優先
順位が必要となる.優先順位つまり成長ステップの順序が,競合する位置にある
セルがどちらの部屋になるかを決定する要因となっている(図 3.10).なお,セル
の最小単位をもっと細かいものにすれば,近似的ではあるが,各部屋の成長プロ
セス順序をなくし同時とすることもできる.成長速度は,主に部屋の形状に影響
を与える.矩形だけでなく L字形や凸形などの部屋生成を可能にし,また制限す
ることもできる.成長プロセスにおいて,次の成長方向に障害物や他の部屋があ
る場合,実験で用いた成長ルールは,それ以降のその方向への成長を止める.こ
の部屋形状への制約は,隙間が生じる要因にもなっている.成長ルールの例外処
理や時間的な変更によって隙間を回避できることもある.
34

図 3.9: 部屋の種座標のわずかな違いが異なる間取りをもたらす.左図の種 2が右
方向に一つ移動することにより,右図では 2と 4の部屋の大きさが変わり,隙間が
無くなっている.
図 3.10: 間取り生成における成長順序が異なれば異なる間取りを生成する.図中
の数字は成長順序を表す.左図における種 3と 4の順序を右図では逆にすること
で,部屋 3と 4の大きさが変化し隙間が無くなっている.
このアルゴリズムを用いた間取り生成では,個体の持つべきデータは種座標だ
けであり(第 3.1.4節),部屋の寸法や向きに関する情報は不要である.そのため,
第 4章のEC手法による最適化時には,染色体の情報量を比較的少なくすることが
できる.
各セルの部屋割当ての組合せ数,つまり間取り総数について,次の 3種類の方
法で検討を行う.
1. 7× 7=49のセルをそれぞれ独立にランダムに 4種類の部屋に割り当てる場合
の,組合せ数は 449(; 3.17× 1029)通りになる.
35

2. 7× 7=49のセルを一つの空間として二等分して行きそれを 3回繰り返し 4つ
の部屋を作る(正方形と長方形のみ)場合,文献 [38]では,その間取り総数
は 49,344通りである.これは同じ条件である 7×7=49のセルの場合で,分割
パターンと線引きの選択数より次の通り算出した.(6C3× 2 + (6C2× 6C1)×18 + (6C1 × 6C1 × 6C1)× 2− (6C1 × 6C1))× 4! =49,344.
3. 7×7=49のセルの中に 4種類の種の取り得る組み合わせ数は 49P4 = 49×48×47×46 = 5, 085, 024通りである.これにさらに成長させる部屋の順序を考慮
すると,4部屋の場合は 4!=24通り乗算され,122,040,576通りとなる.ただ
し,本提案アルゴリズムでは種座標の組合せが異なる場合でも同じ間取りに
なることがある(図 3.11)ため,生成され得る間取りの総数は 122,040,576通
りよりも少ない.実際のパターン数は計算か実験により確かめる必要がある.
図 3.11: これら左右 2つの間取り図の種座標は異なるが,種間のバランスが同じ
であるため,同じ間取りが生成されている.
以上の間取り総数を表 3.1にまとめる.
表 3.1: 間取り総数独立セル・ランダム 449通り
二分割手法 [38] 49,344通り本提案手法 122,040,576通り未満
提案アルゴリズムと成長ルールは計画する空間配置問題に必要な部分空間の形
状を作成することができ,さらに最適化を行う探索空間を有効に限定することが
できるため空間配置案生成にとって有用である.
36

3.3 間取り計画への応用
空間計画は様々な分野にわたるが,本論文では建築計画(間取り案の作成及び
その最適化)を扱う.具体的には,1m× 1mのセルを最小単位(モジュール)と
し,集合住宅(例えば図 3.12のような)の 7m× 7mと 12m× 7m住戸の間取り案
を作成することとする(図 3.1).住宅は建築の代表的なものであり,建築計画研
究の題材として相応しいと考えるからである.そして集合住宅の住戸のような限
定された範囲内に隙間無く部屋を計画することは敷地に建つ独立住宅の計画より
も難しく,もしこの条件で計画できるのであれば独立住宅も可能であると考える
からである.
図 3.12: 集合住宅と住戸の間取り例.左図は,国土交通省WEBページより「スケ
ルトン・インフィル (SI)住宅」[28](※図とモデルの縮尺は異なる)
日本の伝統的家屋建築では,メートル単位(1,000mm)ではなく三尺 (910mm
など)を最小単位とする事も多いが,本論文では現代的な集合住宅の住戸を扱うの
で 1mを最小単位とした.この単位は計画対象や計画コンセプトに応じて様々に設
定できる.
一般的な鉄筋コンクリート造では 7m× 7mが経済的にも理にかなったもの(経
済スパン:スパンは平面における構造体のピッチ,または柱間の距離)と言われて
いる.一級建築士の資格試験・設計課題の対策においても 7m×7mを基本と指導し
ている事が多い [29, 70].実際の設計では状況に応じて多少の変動はあるが,本論
文での問題設定もこのスパンを用いる.なお,7m× 7mの間取りの場合の共同通
路とベランダのスラブ(床)は片持ち梁によって支持するものとする.12m× 7m
37

の間取りの場合は 7m× 7mスパンを 2つ並べ,共同通路の 2m幅のスラブはスパ
ン内とし,ベランダのスラブは片持ち梁での支持とする.
本論文ではこの住戸内に居間,台所,水廻り,寝室の 4部屋の場合と更に寝室
を 2室と住戸内廊下を加えた場合の 2通りの配置案を作成する.どちらの場合に
おいても計画範囲の周囲は,平面図の上方向が北とすると,北側を共同廊下(玄
関側),東西側を隣接住戸の壁,南側をこの住戸のベランダとする.この周囲は空
間生成アルゴリズムにおける成長の限界点(障害物)としての機能も果たす.
各部屋の境界は壁を意味する.実際の建築ではその壁に出入り口や窓などを設
置する必要があるが,本論文の間取り案作成支援システムではそれらの具体的な
位置の決定は行わない.また本システム上では壁の厚みも表現していない.
提案の空間生成アルゴリズムと成長ルールが各部屋の成長開始点「種」からそ
れらの部屋を障害物(他の部屋と住戸の周囲)まで成長させることで,種の初期
座標を中心にした部屋の形状,大きさ,位置を決定する.
38

第4章 進化的多目的最適化
39

4.1 最適化部の手順
最適化部では以下の手順で処理を行う.
1. 空間配置案生成部で作成された各間取りを目的毎に評価をする.
2. 得られた評価値に基づきパレート・ランク [7]を計算する.
3. 間取りの個体間距離を求め,ニッチ・カウント [5]を計算する.
4. パレート・ランクとニッチ・カウントに基づいた各個体の適応度を求める.
5. 適応度に基づき個体を選択し,その選択した親個体に対し遺伝的操作を行う
ことで子個体を生成する.
6. 子個体である部屋の成長開始点(種)座標が計画範囲に合致しない,あるい
は複数の種座標の一致がある個体は致死個体として破棄し,再び親個体に対
し遺伝的操作を行う.
7. 以上の手順を個体数分の子個体が得られるまで繰り返す.
8. 得られた個体数分の染色体を次世代個体として空間配置案生成部へ返す.
本論文の評価実験では,第 4.3.1節の表 4.1に示すように,ルーレット選択,バ
イナリ変換した後の一様交差,突然変異を上記 EC演算処理としている.
40

4.2 間取り問題の目的(4部屋の場合)
建築間取りに対する評価項目は多数ある.それらは具体的には,各部屋の床面
積及び形状,動線等の居住者の利便性,採光などの建築関係法令への適合性,配
管長や壁長等の経済性などである.また,好みなどの主観評価項目もある.本論
文では EMOで最適化するこれらの定量的な多目的として以下の 6目的を定義す
る.実験では,これらの中から 4目的の最適化と 6目的の最適化を行う.また,計
画要件や計画意図によってはこれ以外の目的も当然あり得る.さらに本研究では
今後 IECの導入によって定性的評価も 7番目の目的として導入する.
集合住宅住戸の間取りの成立には今回設定した目的(その中でも特に最初の 4目
的)が一般的に必要と考えられる.類似研究 [62]でも同様に設定されている.具
体的な実施計画への応用では個々に必要とされる特別な目的が追加されるであろ
う.例えば,構造に関する項目,換気や熱などの環境工学に関する項目,避難な
どの安全に関する項目,室内外の景観などの美観に関する項目等の目的が考えら
れる.また,ユーザが独自に希望する目的は IECによって最適化へ反映されるこ
とも考慮している.
各フィットネス関数への入力値は,生成された間取り図から求める.
目的1 床面積
住戸全体の床面積を 49 m2とした場合の各部屋の床面積の目標を居間=16m2,
台所=12m2,水廻り=9m2,寝室=12m2とする.次に部屋 iの床面積 aiと目標床
面積 aiからこの部屋のフィットネス関数 f 1i (ai)を図 4.1のように定める.要求され
る床面積の±10% 以内になるように計画することが一級建築士設計製図試験対策
において求められていること [29, 70]を根拠としている.間取り全体の床面積仕様
に対するフィットネス値をこれら 4部屋のフィットネス値の総和 f1 =∑4
i=1 f1i (ai)
で表す.
41
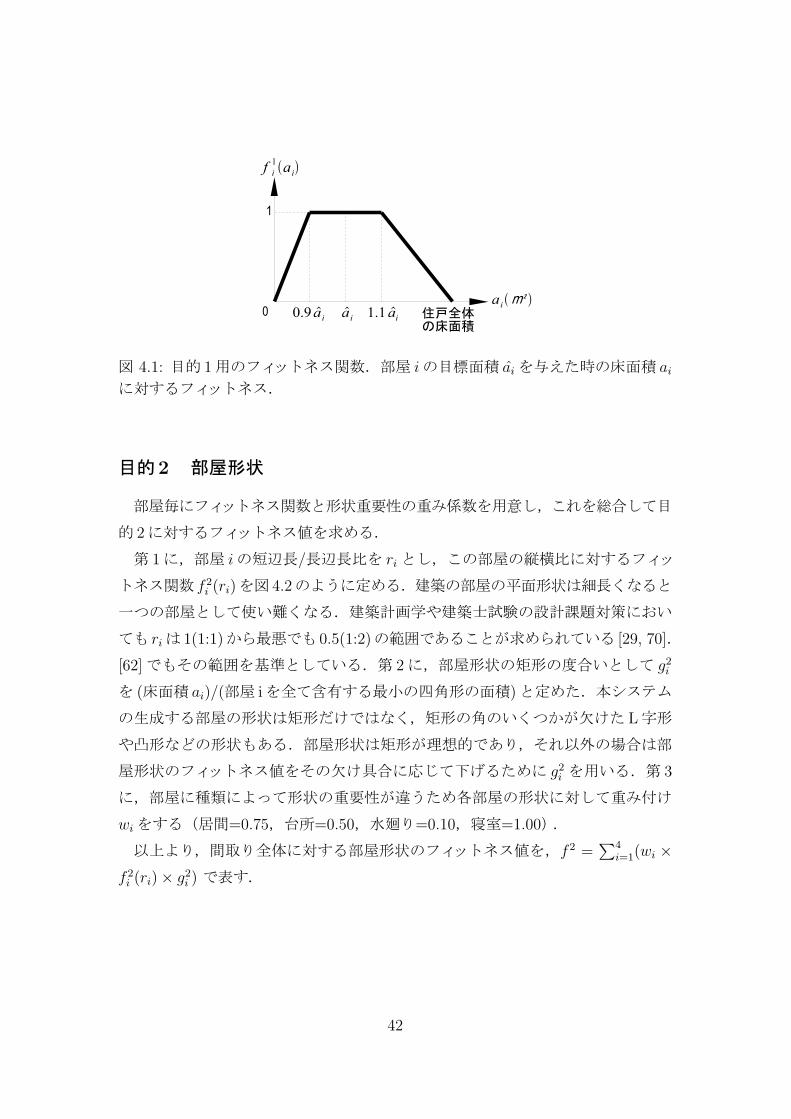
図 4.1: 目的 1用のフィットネス関数.部屋 iの目標面積 aiを与えた時の床面積 ai
に対するフィットネス.
目的2 部屋形状
部屋毎にフィットネス関数と形状重要性の重み係数を用意し,これを総合して目
的 2に対するフィットネス値を求める.
第 1に,部屋 iの短辺長/長辺長比を riとし,この部屋の縦横比に対するフィッ
トネス関数 f2i (ri)を図 4.2のように定める.建築の部屋の平面形状は細長くなると
一つの部屋として使い難くなる.建築計画学や建築士試験の設計課題対策におい
ても riは 1(1:1)から最悪でも 0.5(1:2)の範囲であることが求められている [29, 70].
[62]でもその範囲を基準としている.第 2に,部屋形状の矩形の度合いとして g2i
を (床面積 ai)/(部屋 iを全て含有する最小の四角形の面積)と定めた.本システム
の生成する部屋の形状は矩形だけではなく,矩形の角のいくつかが欠けた L字形
や凸形などの形状もある.部屋形状は矩形が理想的であり,それ以外の場合は部
屋形状のフィットネス値をその欠け具合に応じて下げるために g2i を用いる.第 3
に,部屋に種類によって形状の重要性が違うため各部屋の形状に対して重み付け
wiをする(居間=0.75,台所=0.50,水廻り=0.10,寝室=1.00).
以上より,間取り全体に対する部屋形状のフィットネス値を,f 2 =∑4
i=1(wi ×f2
i (ri)× g2i ) で表す.
42
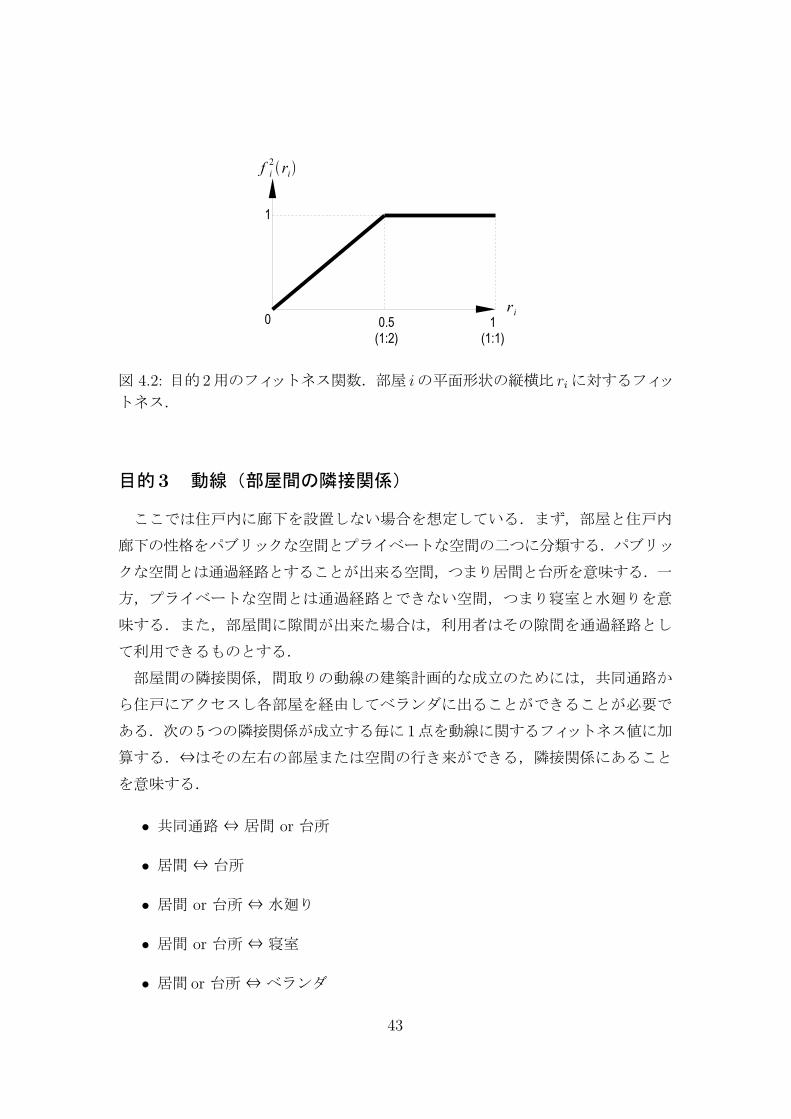
図 4.2: 目的 2用のフィットネス関数.部屋 iの平面形状の縦横比 riに対するフィッ
トネス.
目的3 動線(部屋間の隣接関係)
ここでは住戸内に廊下を設置しない場合を想定している.まず,部屋と住戸内
廊下の性格をパブリックな空間とプライベートな空間の二つに分類する.パブリッ
クな空間とは通過経路とすることが出来る空間,つまり居間と台所を意味する.一
方,プライベートな空間とは通過経路とできない空間,つまり寝室と水廻りを意
味する.また,部屋間に隙間が出来た場合は,利用者はその隙間を通過経路とし
て利用できるものとする.
部屋間の隣接関係,間取りの動線の建築計画的な成立のためには,共同通路か
ら住戸にアクセスし各部屋を経由してベランダに出ることができることが必要で
ある.次の 5つの隣接関係が成立する毎に 1点を動線に関するフィットネス値に加
算する.⇔はその左右の部屋または空間の行き来ができる,隣接関係にあること
を意味する.
• 共同通路 ⇔ 居間 or 台所
• 居間 ⇔ 台所
• 居間 or 台所 ⇔ 水廻り
• 居間 or 台所 ⇔ 寝室
• 居間 or 台所 ⇔ ベランダ
43

目的4 採光(窓面積)
建築基準法第二十八条により各居室(ただし建築基準法第二条により水廻りは
居室ではない)の床面積の 1/7以上の採光(窓)面積を取る必要がある.居間と
台所が接する場合は襖等の可動式間仕切りで仕切る場合を考慮する.採光は共同
通路に接する壁に 1m2/m,ベランダに接する壁に 2m2/m取ることができるもの
とする.フィットネス値は 1/7以上取れる場合を 1とし,それ以外をその度合いに
応じて 0から 1とする(図 4.3).間取り全体の採光に関するフィットネス値 f 4を
それらの総和で表す.
図 4.3: 目的 4用のフィットネス関数.部屋 iの床面積 aiを与えた時の採光(窓)面
積wiに対するフィットネス.
目的5 住戸内壁長
計画する 4部屋間で隣接するセルの辺数を加算することで住戸内壁長を求め,経
済性の指標とする.EMOでの他の目的と合わせるため,フィットネス値はこの数
値の逆数で定義する.また,この住戸内壁は構造体ではなく,建築の躯体と比べ
ると経済的影響はそれ程大きくないため,4目的実験ではこの目的 5は含めない.
目的6 住戸内給排水管長
今回の実験では台所と水廻りの各セル間のユークリッド距離の平均をその長さ
とする.EMOでの他の目的と合わせるため,フィットネス値はこの数値の逆数で
定義する.給排水管長に依存するコストは建築の躯体と比べると経済的影響はそ
44

れ程大きくないため,4目的実験ではこの目的 6は含めない.なお,通常はパイプ
スペースからの距離も考慮し経済性の指標とする.また配水管は排水勾配が必要
となる.集合住宅においてパイプスペースの位置や範囲が限定されることが多い.
またメーターボックスも必要とされ一般に共同通路側に面する位置に配置される.
目的7 定性的評価
上記の 6つの定量的目的を定め,4目的と 6目的の 2つの場合について第 4.3節
で建築的間取りを最適化する評価実験を行う.計画要件や計画意図によってはこ
れ以外の目的も当然あり得る.また第 5章では IECによる定性的評価を 7番目の
目的として導入する.
45

4.3 進化的多目的最適化(4部屋の場合)実験
4.3.1 実験条件
計画範囲を 7m×7m= 49m2とし,その中に 4部屋(居間,台所,寝室,水廻り)
を計画する.なお,本章と第 5章の実験に用いるシステムはフランス国立情報学自
動制御研究所(INRIA)製の Scilab(数値解析プログラミング環境)で開発した.
評価実験の目的は,第 3章で説明した空間配置案生成部の空間生成アルゴリズ
ムとルールで生成された間取りを最適化部で多目的最適化できるかをどうか確認
することである(そのために間取りを構成する部屋をシンプルにするために 4部
屋とした).その際に目的の収束性と解としての間取りの多様性について観察す
る.評価実験は,4目的(目的 1~目的 4)の場合と 6目的(目的 1~目的 6)の場
合とで行う.実験条件を表 4.1に示す.
表 4.1: 実験条件試行数 10目的数 4と 6世代数 50世代個体数 21個体選択方法 ルーレット選択
突然変異率 1%交差率 100%交差方法 一様交差
ニッチの境界閾σshare セル数 (49)/4
なお,各目的の数値(フィットネス)は最大値(最適値)が1になるよう正規化
している.図 1.3でも示したように今後の研究展開では IEC導入を考えているた
め,最適化部でユーザに提示できる画面上の間取り図数を考慮し,個体数を一般
のEMOよりは少ない 21とする.実験での空間配置案生成部では部屋の成長順序
を寝室→水廻り→台所→居間としている.成長の順序は部屋の大きさも影響を及
ぼす [22]ので大きくしたい部屋を早い順序にした方が自然であるということもで
きる.一方,これを打ち消すような種の位置を求めることができれば好ましい間
取りを得ることも可能だということもできる.このことから今回は目標とする部
屋の大きさはあえて考慮せしない成長順で間取りが最適化できるかをも確認する
ために任意のひとつであるこの成長順序とした.また,それぞれの試行において
46

4目的と 6目的とで各部屋の成長開始点(種)の乱数初期値は同じものを用いて比
較実験を行っている.
実験での EMOにはMulti Objective Genetic Algorithm (MOGA) [7]を用いる.
その理由はMOGAの構造がシンプルであり,かつ,ニッチングによる目的空間に
おける解の広がりを求めるのに適している [5]からである.
本論文のMOGAが通常のものと異なる第1の点はそのパレート・ランキングに
ある.通常用いるパレート・ランキング法 [7]が比較対象の個体から優越されてい
る場合にのみランクを下げるのに対し,本論文では弱パレート解の位置となる場
合にもランキングを下げている.その理由は,本論文で扱う間取り最適化問題で
は目的 3(動線)や目的 4(採光)が他の目的と比べて収束しやすく,また同じ数
値になりやすいため,通常のパレート・ランキング法では個体間の差が生じ難い
からである.今回設定した間取り問題の目的の値はこのように最良値である 1や
同じ数値になる個体が多く,つまり弱パレート解の位置にある個体が多く存在す
る(図 4.4).通常のパレート・ランキングのように弱パレート解の個体もランキ
ングを下げないことにすれば,個体間の優劣が付き難いため ECが進まないこと
になる.このことを確認するため通常のランキング方法で実験を行ったが,まっ
たく ECが進展していない(図 4.5).一方,本論文提案のパレート・ランキング
法では各目的共に進展が見られる(図 4.8(a)).
図 4.4: 試行 1,第1世代の 4目的中 2目的の目的値関係性.Objは目的を示す.
47

5 10 15 20 25 30 35 40 45 50
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Generations
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
図 4.5: 通常のパレート・ランキング法(弱パレート解もランクを下げない)によ
る 10試行平均の 4つの目的の収束特性.各収束曲線は,Obj1=床面積,Obj2=部
屋形状,Obj3=動線,Obj4=採光の目的に対する収束特性を表す.
本論文のMOGAが通常のものと異なる第 2の点は,ニッチングにおける個体間
距離 dの算出方法である.建築間取り計画への応用で求められる多様性は「目的
空間」ではなく表現型である「間取り」においてである.通常のMOGAであれば
ニッチングは目的空間で行われるが,目的空間において近い個体であっても間取
りがまったく違う個体もありえるため,本論文では表現型である建築間取り図に
ついてニッチ計算を行う.個体間距離 dの具体的計算方法は,同じパレート・ラン
クの個体間で間取りの各セルを比較し,違う部屋であれば個体間距離 dに 1を加
算する.それをすべてのセルについて行う.ニッチの境界閾σshareは個体のセル
数 (本論文では 49)/4とする.
4.3.2 評価実験結果
図 4.6はランダムに初期化した部屋の成長開始点(種)から空間配置案生成部が
生成した間取り図(最適化部でのEMO最適化を行う前)である.空間配置案生成
48

部の目標である部屋の形状と隙間問題を克服し様々な間取りが作成できることを
示している.
図 4.6: 第 1世代の間取り図例.凡例:緑色 (B)=寝室,水色 (W)=水廻り,赤色
(K)=台所,黄色 (L)=居間.ただし,ここでのB,W,K,Lは種の位置を表すもので
はない.
これらを第1世代の個体群として 4目的で最適化を行った第 50世代目の間取り
を図 4.7(a)に示す.4目的を満たす幾つかの間取りが生成できている.ただしこの
例の多くの個体は台所と居間が入れ替わった 2種類の間取りに限られている.世
代–目的値の図 4.8(a)においても 4目的すべてにおいて第 25世代目前後で一応の
収束点に達する様子が観察された.
49

(a) 4目的
(b) 6目的
図 4.7: 最適化した第 50世代目の間取り図例.凡例は図 4.6と同様.
目的数を 6つにした場合の間取り(図 4.7(b))は給排水管の長さに関する目的を
追加したため,台所と水廻りが近接する間取りが多く見られる.一方で,多目的
間でのトレードオフ関係が生じるためか,床面積と部屋形状に関する目的に合わ
ない間取りも多くなっている. 4目的最適化では特に床面積の目的(Obj1)と部
屋形状の目的(Obj2)が顕著に収束した(図 4.8(a))が,6目的最適化では全ての
目的で収束の改善が乏しい(図 4.8(b)).1世代から 25世代までにおいて極僅かに
進展が見られるものの,それ以降ほとんど改善は見られない.
50

0 5 10 15 20 25 30 35 40 45 50
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Generations
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(a) 4目的
0 5 10 15 20 25 30 35 40 45 50
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Generations
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
Obj5 Wall
Obj6 Duct
(b) 6目的
図 4.8: 10試行平均の収束特性.各収束曲線は,Obj1=床面積,Obj2=部屋形状,
Obj3=動線,Obj4=採光,Obj5=壁長,Obj6=管長の目的に対する収束特性を表す.
51

参考として 6目的で 1000世代までの実験を行ったが進展は見られなかった(図
4.9).
0 100 200 300 400 500 600 700 800 900 1000
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
6 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
Obj5 Wall
Obj6 Duct
図 4.9: 1000世代までの 10試行平均の収束特性.各収束曲線は,Obj1=床面積,
Obj2=部屋形状,Obj3=動線,Obj4=採光,Obj5=壁長,Obj6=管長の目的に対
する収束特性を表す.
4.3.3 考察
今回の実験結果では,4目的最適化では各目的で十分な収束が得られた一方で,
解の多様性は十分ではなかった(図 4.7(a)).次の研究ステップとして定性的目的
に対応するための IEC導入することを前提に個体数を 21としたが,これは通常の
EC手法に比べて少ない個体数であり,この点も解の多様性に影響している可能性
がある.最近の IEC研究では IECユーザの評価特性を学習し,疑似ユーザとして
多数の個体数でシミュレーションを行いながら人間の評価と組み合わせる疲労軽
52

減手法が多く提案されるようになってきた [18, 32, 36, 47]ので,少数個体数であっ
ても多様性が得られる研究の進展も将来期待できる.しかしなから,IECユーザ
そのものが評価する個体数が増える訳ではないので,IEC導入を前提にする限り,
目的関数の設定やニッチング・パラメータの調整などで多様性維持を行うことも
並行して探求していく必要がある.
6目的最適化の場合,多数目的になってしまうためパレート・ランキングによる
ECの性能が著しく低下している(図 4.8(b)).この傾向は石渕らの報告 [23]と合
致する.これは個体数の大小に関わらない現象であると考えられる.現時点では
目的数を減らす,あるいはパレート・ランク以外の方法によるフィットネス値の導
入などが解決策として提案されている.これは今後の研究テーマのひとつである
と考える.
住戸内壁と住戸内給排水管の経済性は建築躯体と比べて一般に小さく,これら
の目的は他の 4目的と比べ重要性は低いと考えられる.また,他の 4目的によって
妥当な部屋の生成が確かめられたので,この 4目的によって今後のシステム構築
を進めることができる.今後,IECを導入することで多数目的空間での最適化す
べき方向(ベクトル)をユーザが示すことが可能になる期待もある.
53

4.4 間取り問題の目的(6部屋と廊下の場合)
目的1 床面積
住戸全体の床面積を 84 m2とした場合の各部屋の床面積の目標を居間=20m2,
台所=16m2,寝室 1=12m2,寝室 2=12m2,寝室 3=12m2,水廻り=9m2,住戸内
廊下=1m2とする.なお,この設定での合計は 82m2である.
次に部屋 iの床面積 aiと目標床面積 aiからこの部屋のフィットネス関数 f1i (ai)
を図 4.1のように定める.間取り全体の床面積仕様に対するフィットネス値をこれ
ら 6部屋と住戸内廊下のフィットネス値の総和(f1 =∑7
i=1 f1i (ai) )で表す.
目的2 部屋形状
部屋毎にフィットネス関数と形状重要性の重み係数を用意し,これを総合して目
的 2に対するフィットネス値を求める.
第 1に,部屋 iの短辺長/長辺長比を riとし,この部屋の縦横比に対するフィッ
トネス関数 f 2i (ri)を図 4.2のように定める.
第 2に,部屋形状の矩形の度合いとして g2i を (床面積 ai)/(部屋 iを全て含有す
る最小の四角形の面積)と定めた.
第 3に,部屋に種類によって形状の重要性が違うため各部屋の形状に対して重
み付け wiをする(居間=0.75,台所=0.50,寝室 1~3=1.00,水廻り=0.25,住戸
内廊下=0.00).なお,4部屋の最適化時は水回り=0.10としていた.
以上より,間取り全体に対する部屋形状のフィットネス値を,f 2 =∑7
i=1(wi ×f2
i (ri)× g2i ) で表す.
目的3 動線(部屋間の隣接関係)
今回は住戸内に廊下を設置する場合を想定しているが,4部屋の場合と同じく,
空間の性格をパブリックとプライベートの二つに分類し,パブリックな性格の空
間を通過経路として利用できるものとする.パブリックな空間(通過経路とでき
る)は居間,台所,住戸内廊下であり,プライベートな空間(通過経路とできな
い)は寝室 1~3と水廻りとする.また,隙間が出来た場合にはその隙間を通過経
路とすることができるものとする.
54

部屋間の隣接関係,間取りの動線の建築計画的な成立のためには,共同通路か
ら住戸にアクセスし各部屋を経由してベランダに出ることができることが必要で
ある.次の 7つの隣接関係が成立する毎に 1点を動線に関するフィットネス値に加
算する.⇔はその左右の部屋または空間の行き来ができる,隣接関係にあること
を意味する.
• 共同通路 ⇔ (住戸内廊下 or 居間 or 台所) または
共同通路 ⇔ 隙間 ⇔ (住戸内廊下 or 居間 or 台所)
• 寝室 1 ⇔ (居間 or 台所 or 住戸内廊下) または
寝室 1 ⇔ 隙間 ⇔ (居間 or 台所 or 住戸内廊下)
• 寝室 2 ⇔ (居間 or 台所 or 住戸内廊下) または
寝室 2 ⇔ 隙間 ⇔ (居間 or 台所 or 住戸内廊下)
• 寝室 3 ⇔ (居間 or 台所 or 住戸内廊下) または
寝室 3 ⇔ 隙間 ⇔ (居間 or 台所 or 住戸内廊下)
• 水廻り ⇔ (居間 or 台所 or 住戸内廊下) または
水廻り ⇔ 隙間 ⇔ (居間 or 台所 or 住戸内廊下)
• ベランダ ⇔ (居間 or 台所 or 住戸内廊下) または
ベランダ ⇔ 隙間 ⇔ (居間 or 台所 or 住戸内廊下)
• (居間 ⇔ 台所) and (居間 ⇔ 住戸内廊下) または
(居間 ⇔ 台所) and (台所 ⇔ 住戸内廊下) または
(居間 ⇔ 住戸内廊下) and (台所 ⇔ 住戸内廊下)
(厳密にはここも隙間経由の場合を含める必要がある.)
目的4 採光(窓面積)
4部屋の場合と同様.
目的5 住戸内壁長
4部屋の場合と同様.
55

目的6 住戸内給排水管長
4部屋の場合と同様.
目的7 定性的評価
4部屋の場合と同様.
56

4.5 進化的多目的最適化(6部屋と廊下の場合)実験
4.5.1 実験条件
計画範囲を 12m×7m= 84m2とし,その中に 6部屋(居間,台所,寝室 1~3,
水廻り)と住戸内廊下を計画する.ここでは,実際の建築計画に利用できるかど
うかを確かめるためには現実にあり得る設定での実験及び検証を行った.
成長順序は居間,台所,寝室 1,寝室 2,寝室 3,水廻り,住戸内廊下の順であ
る.最適化部の手順は第 4.1節で,6部屋と住戸内廊下の配置計画のための目的は
第 4.4節で,進化的多目的最適化における実験条件は 4部屋の場合(表 4.1)で示
したものを使用する.
4.5.2 評価実験結果
図 4.10はランダムに初期化した部屋の成長開始点(種)から空間配置案生成部
が生成した間取り図(最適化部でのEMO最適化を行う前)である.空間配置案生
成部の目標である部屋の形状と隙間問題を克服し様々な間取りが作成できること
を示している.
次に,これら第1世代の個体群を 4目的について最適化を行い,その第 50世代
目の間取り(個体)が図 4.11(a)である.部屋の大きさや採光が取れていない間取
り,動線に問題のある間取りもあるが,4目的を満たす幾つかの間取りが生成でき
ている.多くの間取りで住戸内廊下が北東(右上)角に位置しており,玄関とし
て機能している.部屋の大きさや採光が取れていない間取りや動線に問題のある
間取りもあるが.その多くの間取りにおいて住戸内廊下が北東(右上)角に位置
しており,その住戸内廊下の一部が玄関として機能している.
4目的で 10回の試行を行った結果の世代–目的値の関係を図 4.12(a)に示す.4目
的すべてにおいて第 25世代目前後で一応の収束点に達する様子が観察される.
目的数を 6つにした場合の間取り(図 4.11(b))は給排水管の長さに関する目的
を追加したため,台所と水廻りが近接する間取りが多く見られる.
6目的最適化では目的の収束が 4目的の時と比べて遅い(図 4.12(b)).1世代か
ら 50世代に渡って少しずつ進展が見られる.50世代での目的 1から目的4までを
比べると 6目的の方がおおよそ 0.05程度悪い.また,この問題では目的 5と目的
6の値は他の目的と比べ第 1世代から低く,かつ進展も良くない.
57

図 4.10: 第 5試行の第 1世代の間取り(6部屋と住戸内廊下).凡例:黄色 (L)=居
間,赤色 (K)=台所,緑色 (B)=寝室,水色 (W)=水廻り,灰色 (記号なし)=住戸内
廊下,白色 (記号なし)=隙間.ただし,ここでの L,K,B,Wは種の位置を表す
ものではない.
58

(a) 4目的
(b) 6目的
図 4.11: 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
59

0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(a) 4目的
0 5 10 15 20 25 30 35 40 45 50
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
6 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
Obj5 Wall
Obj6 Duct
(b) 6目的
図 4.12: 10試行平均の収束特性.各収束曲線は,Obj1=床面積,Obj2=部屋形状,
Obj3=動線,Obj4=採光,Obj5=壁長,Obj6=管長の目的に対する収束特性を表す.
60

4.5.3 考察
4部屋の場合と比べて 6目的の最適化に進展が見られるのは,部屋数が増えたこ
とや住戸内廊下を設置することによって間取り(個体)間の差が大きく現れるこ
とが要因であると考えられる.
住戸内廊下は空間生成部で他の6部屋と同様の成長アルゴリズムとルールによっ
て生成され,最適化部では面積や形状の設定値が異なるもののそれ以外は同じ方
法での最適化を行っている.目標面積や形状に関する目的の変数に違いはあるも
のの,その他は部屋と条件の違いは無い.にもかかわらず廊下としての形状や機
能が十分に形成されている.例えば,その住戸内廊下の一端が共同廊下からのア
プローチ,つまり玄関と成って,それが台所や居間へと繋がっている,あるいは部
屋同士を間接的に繋ぐ役目も担っていることもある.これらのことが最適化され
た間取りを観察することによって確認された.
次に,試行毎に出来た間取り(図 4.13)に関して考察を行う.
• 第 1試行:玄関は台所の一部に取ることになる.居間と台所の境界を可動間
仕切り等にすることで一体的に扱っても採光が不十分である.建築基準法を
満たすには居間南(下)側の寝室との境界も可動間仕切りにする必要がある.
また,住戸内廊下が機能していない.2つの寝室がベランダに面することが
この間取りの特徴である.
• 第 2試行:玄関が居間の一部になることが(今回の実験では動線に関する目
的で居間の一部が玄関となることを許可しているが,これを禁止することも
当然出来る.今回の実験は間取りの多様性を確認する意味が大きいためこの
ような設定としている),実際の設計ではあまり見られないケースであり,
好みの分かれるところであろう.この居間と台所が入れ替わればあり得る間
取りである.パブリックな性格の部屋(ここでは台所)への繋がりが直線的
でなく曲がっていることが玄関からの視線のコントロールの点では良い.共
同通路側の 2寝室が狭い.
• 第 3試行:居間の一部が玄関になることは第 2試行の間取りと同様である.
ベランダ側に寝室が 2つあるが 1つは台側から,もう 1つは住戸内廊下を通
じて,住戸中央の水廻りの左右に分かれてアクセスする.採光の必要が無い
水廻りが住戸の中心にあり,その使い勝手が様々に想定できるのもこの間取
りの特徴である.
61

• 第 4試行:共同通路側の 2つの寝室は,1つは狭く,もう 1つはアクセスが
出来ない.水廻りには住戸内廊下を通じてアクセスできる.その住戸内廊下
は L字形になっており,先に述べた水廻りへのアクセスから曲がった先は無
駄である.これらの他は台所の一部からのアプローチと居間への繋がり,ベ
ランダ側の寝室などは問題ない.
• 第 5試行:住戸内廊下の端が玄関として上手く機能し,台所へと繋がってい
る.そして台所から居間への繋がりは 90度曲がっているので,住戸内廊下と
台所の接点だけで視線の制御を行へば良い.居間の広さは十分すぎるので,
それを狭い台所,共同通路側の 2つの寝室,水廻りの大きさと調整の必要が
ある.この間取りも第1試行の間取りと同様に,採光のために居間と台所の
境界を可動間仕切り等にする必要がある.
• 第 6試行:設定した条件によって最も一般的に考え得る間取りである.住戸
内廊下の幅が大きいが,好みによってはL(居間)とK(台所)が入れ替わっ
た良いとすることも考えられる.この間取りも第1試行の間取りと同様に,
採光のために居間と台所の境界を可動間仕切り等にする必要がある.
• 第 7試行:住戸内廊下の端が玄関になり,90度曲がって居間へと繋がる.そ
こでの住戸内廊下の幅は 2mとやや大きめであるが,上下 2つの寝室への入
り口をここに設定するのならばあり得る大きさである.居間と台所の位置関
係は好みの分かれるところではある.この間取りも第1試行の間取りと同様
に,採光のために居間と台所の境界を可動間仕切り等にする必要がある.さ
らに寝室の 1つも無窓となるので,この寝室と居間・台所の境界も可動間仕
切り等にする必要がある.
• 第 8試行:住戸内廊下が上手く機能していないが,台所から共同通路側の寝
室へ,居間から水廻りへは住戸内廊下を通じてアクセスにすることも出来る.
水廻りとベランダに面する寝室に挟まれた寝室は無窓なので,ベランダ側の
寝室あるいは居間との境界を可動間仕切り等にする必要がある.
• 第 9試行:住戸内廊下の一端が玄関となり居間へと短い距離で続く.この間取
りも居間と台所の位置関係は好みの分かれるところである.3つの寝室と水
廻りは大きさ,形状,位置に問題は無い.この間取りも第1試行の間取りと
同様に,採光のために居間と台所の境界を可動間仕切り等にする必要がある.
62

• 第 10試行:台所の一角からのアプローチになっている.この台所の幅が狭く
十分でない.一方でこの台所から続く住戸内廊下の幅が大きい.居間もやや
狭い.住戸内共同廊下を調整し北東角に位置する寝室の大きさも確保したい.
設定のような条件が与えられた時,一般に第 6試行のような間取り案が考えら
れるが,本システムはそれ以外にも目的条件に近い多様な間取り案を作成するこ
とが出来ると言える.これらの間取り案が直接的に設計図面となるのではないが,
複数の計画案を作る際のヒントとなり,十分に空間計画支援システムの役割を果
たすと考えられる.
図 4.13: 6部屋と住戸内廊下の配置が最適化された間取りの例.10試行の中から代
表的な間取り各 1を選別した.上段左から第 1~5試行,下段左から第 6~10試行.
本論文のシステムでは 21個体での実験検証を主に行っているが,この個体数は
一般的なECでのものと比べて非常に少ない.この個体数で問題は無いのかを確認
するために 1000個体,6目的,50世代,6部屋と住戸内廊下の計画での実験を行っ
た.その結果は図 4.14の通りである.21個体の場合(図 4.12(b))と比べて目的 6
(給排水管長)は 0.07ほど良くなっているが,これ以外の目的ではそれほど差は見
受けられない.今回のシステム設定では少なくとも 5つの目的については 21個体
63

でも 1000個体と同様の最適化が行われると言える.なお,計算コスト(時間)は
6日 15時間 13分かかった.実験では数値解析プログラミング環境は Scilab-4.1.2,
計算機はDell社(Pentium 4 CPU 3.2GHz 3.19GHz, RAM 1GB),OSはMicrosoft
Windows XP SP2を使用した.
0 5 10 15 20 25 30 35 40 45 50
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
6 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
Obj5 Wall
Obj6 Duct
図 4.14: 1000個体,6目的,50世代,6部屋と住戸内廊下の計画での 10試行平均の
収束特性.各収束曲線は,Obj1=床面積,Obj2=部屋形状,Obj3=動線,Obj4=
採光,Obj5=壁長,Obj6=管長の目的に対する収束特性を表す.
64

第5章 対話型進化的多目的最適化
65

5.1 対話型システムの意義と課題
進化的多目的最適化によって建築平面計画(間取り)を最適化することが可能
であることが第 4章で確かめられた.計画に関する目的を予め関数化できれば,こ
れらの多目的に適応する間取りを得ることは出来る.建築計画の要件(目的)は
多数存在するため,計画を行う者はそれらを一つ一つチェックしながら計画を行
う.もし計画要件が関数化することが出来るならば,そのチェックや最適化はコン
ピュータで行う方が有利である.
しかし,目的関数が設定出来ない,あるいは困難な要素が空間計画,特に建築
分野などでは多く存在する.例えば利用する人によって建築の利用目的が様々に
存在し,それによって部屋の位置や部屋間の関係性(繋がり)に関する考え方が大
きく異なることなどである.また,それらの人によって異なる,流動的な要素は
予め目的関数として設定しない方が解(間取り)を過度に限定することなく,解
の多様性を保持する可能性もある.予め目的関数を設定しない進化的最適化手法
に対話型進化的計算技術(IEC)がある.IECを用いることでユーザの好みや目的
関数化が困難な要素についても最適な解を探し出すことが出来る.
建築計画では関数化できる目的,出来ないあるいは困難な目的の両方が多数存
在するため,IECと EMOとを組合せた最適化が有効であると思われる.しかし,
この IECと EMOの組合せに関する研究 [3, 26]は少なく,一般に進化的計算では
最適化する個々の問題に合わせて進化的計算のパラメータを調整する必要がある
ため,本研究の建築計画最適化問題について,IECとEMOの組合せ方法を検討す
ることが大きな課題のひとつとなる.
66

5.2 システム構成
建築(間取り)計画のための対話型進化的多目的最適化システムの構成は第 1.3
節の図 1.3に示したとおりである.本節ではそのシステムの中の最適化部について,
特に EMOと IECの取り扱い方について述べ,この構成での実験の準備とする.
5.2.1 EMOと IECの組み合わせ
通常のEMO(本研究では具体的にはMOGAを用いている)では複数の目的関
数のフィットネス値をパレート手法によってランキングを行い,そのランクに基づ
いて個体のフィットネスとしている(第 2.1.3節).一方,IECはユーザ評価をそ
のままフィットネスとすることが一般的である.本研究の目標とする最終の建築計
画支援システムは EMOと IECを組み合わせて最適化を行うが,その組み合わせ
は大きくは次の 2つの方法が考えられる(更にその 2つを複合的に行う方法も考
えられる).
• IECでのユーザ評価値を EMOにおける多目的関数のフィットネス値の 1つ
としてパレート・ランキングの過程に組み入れる.
• 進化的計算の世代によって,通常のEMOによる多目的最適化を行う世代と
通常の IECによる最適化を行う世代を組み合わせる.
実際に人間に評価を行わせるには,評価に伴う疲労などを考慮するとその回数
が問題となる.疲労を軽減することを目的とした EMOと IECの組み合わせの研
究 [26]がある.本章の実験では様々な組み合わせを試みるために,被験者の代わ
りとして擬似人間を用いる.
本章の実験は擬似人間による IECのスコアが良いと言うためのものではない.
IECによっても最適化が出来ること及びユーザ(擬似人間)評価とEMO部におけ
る目的との関係性を確認・検証することが実験の主な動機である.
5.2.2 擬似人間の設定
被験者を用いた対話型進化的計算の実験での人間の評価は常に一定であること
はなく,いわゆる「ノイズ」を含んでいると言われている.また被験者を用いた
実験では何度も評価を繰り返すことが疲労や時間の関係で難しく,また条件を変
67

えた比較実験では人間の慣れの問題があり,実験の順序が大きく影響する.これ
らのことから評価の安定した,繰り返しに適した擬似人間を用いた実験が対話型
進化計算を用いたシステムの実験には有効である.
擬似人間であっても 5段階評価に変換する際に量子化によるノイズが含まれる
ことになる.EC(GA)は量子化ノイズに強いとされ [39],特に専門性を要求する
タスク,例えばMicro Electro Mechanical Systems(MEMS)などに対しては擬似
人間と人間評価との違いは小さい [17].よって建築(間取り)計画問題のECで最
適化においても擬似人間による検証が有効であると思われる.
今回の実験では目標とする間取り(図 5.1)を予め設定する.その目標の間取り
と個体の間取りをセル単位で比較し差を求める.その差が小さいほど個体の間取
りは目標の間取りに近いことになるので,擬似人間の評価として高い値を与える.
具体的には,個体群の中で差の最も大きいものと差の最も小さいものの差を 5等
分し,差が小さい方から 5点,4点,3点,2点,1点を該当する個体に対する擬
似人間の評価値として割り当てる.5点が最良,1点が最悪となる.なお,個体と
目標間取りとの差が全ての個体で同じである場合は全て同じ評価値(例えば 3)と
する.
擬似人間の目標間取りは,進化的多目的最適化で用いる目的(計画条件)と計
画範囲の周囲に合うもので建築計画的に最も一般的に考え得るであろうものを設
定した.計画範囲の周囲は左右に条件の違いが無いため目標の間取りも左右対称
の 2種類(図 5.1)を用意した.この 2つの目標間取りと個体の間取りを比較し,
その内の差の小さい方の値を評価に用いる.また寝室に関する目的は寝室 3部屋
に共通するので,寝室であれば同じであると判定するものとした.擬似人間の目
標間取りの詳細は次の通りである.
• 計画範囲は縦 12m×横 7m= 84m2の集合住宅の 1つの住戸とする.
• 計画範囲の周囲は上(北)が共同廊下,左右(東西)が隣接住戸を隔てる壁,下(南)がベランダである.採光条件は第 4章と同様である.
• 計画する部屋とその面積は居間=20m2,台所=15m2,寝室1~3=各12m2,水
廻り=9m2,屋内廊下=4m2とする.
• 各目的のフィットネス値(正規化後)は,目的 1=0.9950,目的 2=0.9861,目
的 3=1.0000,目的 4=1.0000,目的 5=0.3870,目的 6=0.2481である.
68

図 5.1: 擬似人間の目標とする間取り.計画範囲の周囲は左右に条件の違いが無い
ため目標の間取りも左右対称の 2種類を用意した.黄色=居間,赤色=台所,緑色
=寝室 1~3,水色=水廻り,灰色=屋内廊下.
69

5.3 実験
6種類の実験結果は以下の通りである.
1. 第 1~50世代を擬似人間による評価での単目的最適化(図 5.2).まずは擬似
人間が機能しているかを確認するために擬似人間の評価のみで最適化を行っ
た.間取り図(図 5.3(a))の観察によると住戸内廊下が台所まで届いていな
い,台所が目標間取りと比べて横長すぎるなどの問題もあるが,最適化でき
ると言える.4目的の関数値は全てにおいて第 15世代までに高い値にまで急
速に収束している.ただし目的 3の動線の値は他の実験と比べて悪く,さら
に第 35世代以降は下降している(図 5.3(b)).
図 5.2: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~50世
代を擬似人間による評価での単目的最適化.灰色のセルはその世代において目的
をパレート・ランキングに反映することを意味する.
70

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.3: 第 1~50世代を擬似人間による評価での単目的最適化の 10試行平均の収
束特性.
71

2. 第 1~50世代を 4目的と擬似人間による評価での多目的最適化(計 5目的)
(図 5.4).被験者が 50世代も評価するのは不可能であるが,擬似人間による
評価を進化的多目的最適化の 5番目の目的とした場合の最適化を確認するた
めにこの組合せで実験を行った.この第 50世代の間取り図(図 5.5(a))によ
ると,擬似人間の目標間取りとは異なるものになっている.収束特性は 4目的
だけの最適化(図 4.12(a))と比べてやや悪いものとなっている(図 5.5(b)).
図 5.4: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~50世
代を 4目的と擬似人間による評価での多目的最適化(計 5目的).灰色のセルはそ
の世代において目的をパレート・ランキングに反映することを意味する.
72

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.5: 第 1~50世代を 4目的と擬似人間による評価での多目的最適化(計 5目的)
の 10試行平均の収束特性.
73

3. 第 1~4世代を 4目的の多目的最適化,第 5世代を擬似人間による評価での
単目的最適化の 10回繰り返し(図 5.6).擬似人間の評価回数を人間評価で
も可能な回数へ減らすための検証として 5世代毎に設定した.擬似人間評価
を行う時は単独の最適化としている.第 5試行の第 50世代の間取り図(図
5.7(a))では居間と台所が擬似人間の目標間取りとは入れ違いがあるものの,
この他はかなり目標間取りに近いものとなっている.図 5.7(b)は 4目的の収
束特性を示す.
図 5.6: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~4世代
を 4目的の多目的最適化,第 5世代を擬似人間による評価での単目的最適化の 10
回繰り返し.灰色のセルはその世代において目的をパレート・ランキングに反映
することを意味する.
74

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.7: 第 1~4世代を 4目的の多目的最適化,第 5世代を擬似人間による評価での
単目的最適化を 10回繰り返し第 50世代まで行った 10試行平均の収束特性.
75

4. 第 1~4世代を 4目的の多目的最適化,第 5世代を 4目的と擬似人間による評
価での多目的最適化(計 5目的)の 10回繰り返し(図 5.8).擬似人間の評
価回数を人間評価でも可能な回数へ減らすための検証として 5世代毎に設定
した.擬似人間評価を行う時は 4目的と組み合わせて最適化を行った.第 50
世代の間取り図(図 5.9(a))では擬似人間の目標間取りに近いものとなって
いるが,住戸内廊下は異なる位置で機能している.図 5.9(b)は 4目的の収束
特性を示す.
図 5.8: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~4世代
を 4目的の多目的最適化,第 5世代を 4目的と擬似人間による評価での多目的最
適化(計 5目的)の 10回繰り返し.灰色のセルはその世代において目的をパレー
ト・ランキングに反映することを意味する.
76

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.9: 第 1~4世代を 4目的の多目的最適化,第 5世代を 4目的と擬似人間による
評価での多目的最適化(計 5目的)を 10回繰り返し第 50世代まで行った 10試行
平均の収束特性. 77

5. 第 1~5世代を擬似人間による評価での単目的最適化,第 6~50世代を 4目的
の多目的最適化(図 5.10).初期世代において擬似人間評価を中心に最適化
を行うことでその後の最適化にどのような影響があるかを確かめる目的でこ
の設定の実験を行った.第 1~5世代を擬似人間による評価での単目的最適化
であるが,15世代までの進化が 4目的だけの実験(図 4.12(a))よりも速く,
更に 35世代以降の値も高くなっていることは注目に値する(図 5.11(b)).図
5.11(a)は第 5試行における第 50世代目の間取り図を示す.
図 5.10: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~5世
代を擬似人間による評価での単目的最適化,第 6~50世代を 4目的の多目的最適
化.灰色のセルはその世代において目的をパレート・ランキングに反映すること
を意味する.
78

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.11: 第 1~5世代を擬似人間による評価での単目的最適化,第 6~50世代を 4
目的の多目的最適化の 10試行平均の収束特性.
79

6. 第 1~5世代を 4目的と擬似人間による評価での多目的最適化(計 5目的),
第 6~50世代を 4目的の多目的最適化(図 5.12).初期世代において擬似人
間評価を中心に最適化を行うことでその後の最適化にどのような影響がある
かを確かめる目的でこの設定の実験を行った.結果は図 5.13の通りである.
図 5.12: パレート・ランキングに用いる目的の組み合わせ(世代毎).第 1~5世
代を 4目的と擬似人間による評価での多目的最適化(計 5目的),第 6~50世代を
4目的の多目的最適化.灰色のセルはその世代において目的をパレート・ランキン
グに反映することを意味する.
80

(a) 第 5試行の第 50世代目の間取り図例.凡例は図 4.10と同様.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
(b) 10試行平均の収束特性.
図 5.13: 第 1~5世代を 4目的と擬似人間による評価での多目的最適化(計 5目的),
第 6~50世代を 4目的の多目的最適化の 10試行平均の収束特性.
81

5.4 考察
実験毎及び 2つの実験を比べての考察を述べる.
• 1番目の第 1~50世代を擬似人間による評価での単目的最適化(図 5.3).が
4目的共に最適化が速い.ただし擬似人間が間取りのセルを単位として比較
しているためか,面積の小さい住戸内廊下に関しては蔑ろになっている可能
性がある.住戸内廊下が機能しないために目的 3の動線に値が低くなってい
ると思われる.
• 2番目の第 1~50世代を 4目的と擬似人間による評価での多目的最適化(計 5
目的)(図 5.5)は全世代にわたって 5目的の最適化を行っているためか,目
的値がやや悪いものとなっている.
• 3番目の第 1~4世代を 4目的の多目的最適化,第 5世代を擬似人間による評
価での単目的最適化の 10回繰り返し(図 5.7)と 4番目の第 1~4世代を 4目
的の多目的最適化,第 5世代を 4目的と擬似人間による評価での多目的最適
化(計 5目的)の 10回繰り返し(図 5.9)を比べると,全世代で 4目的につ
いて最適化を行っている 4番目の方が 4目的については 25世代目までは値
が良い.しかしそれ以降はほとんど同じになっている.このことからこの問
題設定では一定間隔で 5目的での最適化は初期世代において比較的有効であ
ると言える.
• 6番目の第 1~5世代を 4目的と擬似人間による評価での多目的最適化(計 5
目的),第 6~50世代を 4目的の多目的最適化(図 5.13)では,初期世代で
5目的で最適化を行っているために進化が速くない.一方,5番目の第 1~5
世代を擬似人間による評価での単目的最適化,第 6~50世代を 4目的の多目
的最適化(図 5.11)では,初期世代で擬似人間による単目的最適化によって
部屋(種)の位置が大まかに最適化され,それ以降は 4目的の最適化によっ
て部屋の形状などが決定されていると思われる.
4目的のみの最適化では試行毎に収束する間取りが大きく違うので,種の初期値
が重要であると考えられる.人間評価を組み合わせる大きな目的は「好み」を間
取りに反映させることで,設定している 4目的では直接的に決定できない「部屋
の位置」がここでは好みにあたると考えられる.これらとユーザ評価の回数を少
82

なくするために,早い世代(1~5世代)で擬似人間評価を行い,その後(6世代以
降)で 4目的のみのMOGAでの最適化は,擬似人間の目標とする間取りに近く,
かつ世代の後半では 4目的のみの最適化や擬似人間のみの最適化よりも良いフィッ
トネス値を得ることがこの問題設定では可能であることが判明した.更に人間評
価の回数を 5回以下にできる可能性もあり,最初に大まかな部屋の位置を手動で
指定することも考えられる.
動線や採光などの不可避な条件も適応度判定に取り入れている.その不可避な
条件は全てを満たさない個体は間取りとして成立しないが,その個体が進化の過
程で最適化される可能性があるため,本研究の設定では無効の個体(計画案)と
して破棄することはしていない.無効個体として破棄し個体を再算出した場合は,
より広域の探索を行うアルゴリズムとなる.広域探索は利点ではあるが進化速度
は遅くなることが予想される.また,本システムは自動計画システムではなく計
画支援システムであり,計画案の一部分に致命的な欠点があったとしてもユーザ
がその判断によって計画案を修正することを想定している.ただしユーザがその
ような判断ができない場合は目的のフィットネスや問題点を表示するなどの必要は
ある.
今回の実験では部屋の種初期値を乱数により決定している.それは先見知識を
用いず設定した条件(目的)のみでの最適化実験のためでもある.先見知識を用
いて大まかな種の位置を決めれば探索空間を限定することができ進化計算も効率
的に行われる.しかし一方では解を限定することにもなるため,本システムの目
標のである「思いもよらなかった案」や解の「多様性」に反することになる.
第 50世代が進化の到着地点であるということではない.例示した図は進化過程
の瞬間であり,そこで現れる間取りが必ずしもその試行の最終的な結果を示すも
のではない.またその時点において明らかに排除されるような解であっても後の
進化によって良い解となる可能性は残されている.システムを使用する者の計画
に関する知識や技能が不十分ならば,不適切な解の排除を行うシステムの方が良
いであろう.これに対して計画の専門家であれば,不適切な解も僅かな修正によっ
て良い解にすることが出来る可能性もある.
83

擬似人間の評価値のみでの最適化で 100試行の実験も行った.10試行の場合(図
5.3(b))と比べてほとんど差は見受けられない(図 5.14).今回のシステム設定で
は 21個体,10試行でも 100試行と同様の平均フィットネス値が得られると言える.
0 5 10 15 20 25 30 35 40 45 50
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
4 Objectives
Generation
Fit
ne
ss
Obj1 Area Size
Obj2 Proportion
Obj3 Circulation
Obj4 Sunlighting
図 5.14: 第 1~50世代を擬似人間による評価での単目的最適化の 100試行平均の 4
目的に関する収束特性.
84

第6章 建築計画支援システム主観評
価実験
85

6.1 実験仕様
6.1.1 目的と概要
この実験の主な目的はシステムの有用性を実験データ及びユーザの反応から得
ることである.今のシステムではEMOだけでは 20世代前後である一つ解に収束
してしまうが,IECによってその速度の変化や違う解が得られることはあるのか
を調べる.
以下に実験の概要を述べる.
• 第 5章より前段階の実験である.よって配置するのは 4部屋である.計画範
囲は 7m×7m=49m2,個体数は 21個体,計画要件なども第 4章の 4部屋の場
合と同様である.
• 実験の設定は次の 2種類とする.なお,第 4章の実験においておおよそ第 15
世代から第 20世代で目的値(フィットネス)の収束が見られることにより実
験世代数を 15世代とし,被験者の評価による疲労度を鑑みて 1つの実験あ
たりの評価回数を 5世代までとした.また被験者の評価と予め設定した 4目
的との組み合わせ方については [26]を参考に決定した.
– 実験 1:まず 4目的最適化を 2世代行い,次に 4目的とユーザ評価によ
る最適化を 1世代行う.それを 5回繰り返す合計 15世代の実験.
– 実験 2:まず 4目的最適化を 10世代行い,次に 4目的とユーザ評価によ
る最適化を 5世代行う合計 15世代の実験.
• 被験者は 5名ずつ 3種類のグループで計 15名の被験者に対して実験を行っ
た.各グループの構成は次のように建築計画の経験及び学習の度合いによっ
て分けられる.
– 建築計画の経験及び学習のまったく無いメンバー(九州大学芸術工学府
及び芸術工学部の芸術情報系の大学院生と学部学生)で構成されるグ
ループ.
– 建築計画の学習を行っているメンバー(九州大学芸術工学部環境設計学
科(建築系)学部学生)で構成されるグループ.
86

– 仕事として建築計画を行っているメンバー(建築士を含む建築設計事務
所所員)で構成されるグループ.
• 実験場所:九州大学大橋キャンパス 5号館 7階ゼミ室.
• 使用機材:ノート PC(15インチワイド画面),マウス,マウスパッド,筆
記具(シャープペンシル,消しゴム,マーカー 4色),アンケート用紙,間
取り用メモ用紙(7×7グリッド).
• 注意すべき設定事項:初期乱数を同じにする.評価前のGUIボタンはデフォ
ルトではクリア(無評価)状態にしておく.
• GUI(図 6.1)
– 「間取り図」表示:平面図
– 1~5点のボタン:1点が最低で 5点が最高の評価点である.
– 「Generation」表示:実験の進行状況を把握できるように進化的計算の
世代数を表示している.
– 「並べ替え」ボタン:ユーザの評価に伴う疲労を軽減するために設置し
ている.提示しているいくつかの個体に評価点を付けた後は,異なる
点数がバラバラに並ぶことが通常である.そこで今一度その評価点を
チェックしようとした場合,全体を見比べながらの作業は容易ではなく
疲労を伴う.「並べ替え」ボタンで評価点順に個体(間取り図)とその評
価点を合わせて表示の並び替えを行えば,個体の隣同士を比較するだけ
で評点チェックが行え,疲労軽減になる.
– 「次の世代」ボタン:全ての個体(間取り図)についての評価が終了し,
設定した評価すべき次の世代へ進化的計算のプロセスを進める.
– 「終了」ボタン:評価すべき世代を全て評価し終わった,あるいは途中
で評価を終える際にこのボタンによってプログラムを終了させる.
– メニューにある「表示」で間取り表示を通常の 2次元平面図と壁が立ち
上がって見えるアイソメ図(3次元)とを切り替えることが出来る(図
6.2).
87

図 6.1: GUI
図 6.2: 2次元/3次元の表示切替.
なお,本章の実験に用いるシステムはマイクロソフト社製のVisual Studio C++
で開発を行った.
88

6.1.2 実験の手順
以下の手順,スケジュールで実験を行った.
1. 実験及びシステム操作の説明(第 6.1.3節).5分程度.
2. システム操作に慣れるよう,事前に準備期間を設け,システム不慣れによる
低評価がでないようにする.5分程.
3. システム Aの実験(実験 1か実験 2を被験者によって行う順序を換える).
15~20分程度.
4. システム Bの実験(実験 1か実験 2を被験者によって行う順序を換える).
15~20分程度.
2種類のシステムを被験者にはどのシステムがどの機能を持っているかを見
せない.被験者を3グループ(できるだけ同じカテゴリ内の被験者を 2通り)
に分けて,提示順をバラバラにし,順序効果が生じないようにすること.た
だし被験者にはシステムA, Bの名前を与えて 2通りのシステム比較をする
ことは明示する.そうしないとアンケート解析が難しくなる.
5. アンケート(付録参照)記入及び実験を終えてあなたの理想とする間取りを
手書きで描写(複数可).10分程度.
6.1.3 実験の説明
実験に際し被験者に対し以下の事項を説明した.
• 目的:システムが提示するマンションの一つの住戸の間取りを評価しながら,部屋配置を計画していただきます.目標はあなたの判断基準,好みなどに合っ
た複数の間取りを計画することです.
• システムの説明:
– 計画対象:マンションの一つの住戸(中層の 1階以外,RC造,計画範
囲の面積は 49m2).
– 計画の基本単位:間取り図面の1つのセル(グリッド)は1m2(1m×1m).
89

– 計画する部屋:リビングルーム(LR),ダイニングキッチン(DK),水
周り(水),ベッドルーム(BR)の4部屋です.水周りは風呂,便所,
洗面,洗濯機置き場などを含みます.今回はこの内部までの計画は行い
ません.
– アクセス:共同通路から住戸に入ります.
– 方角:上(共同通路)側が北です.
– 2D/3D表示切替:間取り図の 2D/3Dの切り替えはいつでも好きなよう
に行ってください.固定でも良いです.
• 計画条件:目標面積(±10%程度):LR=16m2,DK=12m2,水=9m2,BR=12m2
動線(共同廊下側から住戸に入り各部屋への出入り)を考慮してください.
基本的に部屋と部屋との間は壁によって隔てられるものとし,必要に応じて
扉等を付けるものとします今回は住戸内に廊下はありません.よって共同通
路側の一つのセルを玄関として下さい.採光:水周り以外の部屋の採光を考
慮してください(建築基準法では床面積に対する 1/7以上の採光(窓)面積
が必要).共同通路側には玄関と必要に応じて窓(腰壁付き)(1m2/m程度)
を設置し,ベランダ側にはベランダへ繋がる開口部(2m2/m程度)を設置す
るものとします.DKと LRが接する場合,その接する壁面は可動間仕切り
(ふすま,アコーデオンカーテン)とすることが出来ます.そのため採光の
計算やその利用方法(例えば食事をする場所やさらに一室のように使うこと
も出来るなど)に関しても自由度があるものとします.間取り図に時々表れ
る「空(から)」はどの部屋にも割り当てられていません.システム上の欠
点なのですが,今回ここは通路や物入れとして使えるものとします.
• 評価方法:
1. 表示された間取りに対して全て 1~5の評価をして下さい.評価は相対
評価とします.主観的な評価でかまいません.5点評価で 5が最も良い,
1が最も悪いとします.例えば,一つの画面上(21の間取り)で最も良
いと思われるものに 5を,最も悪いと思われるものに 1を付け,その間
の評価も相対的に行ってください.同じ点数が複数あり得ます.注意:
とても良いと言える間取りがない場合や,すべて良い間取りばかりに
90

なった場合があるかもしれませんが,必ず最高 5点と最低 1点の間取り
を選び全体を相対評価してください.
2. 「並び替え」ボタンについて:評価した評価値を順に間取り図を並び替
えます.これによって同じ点数同士の間取りなどを比べながら評価をし
直すことができ,かつ,評価の精度を上げると同時に気楽に評価ができ
るようになります.また評価していない間取りを簡単に知ることもでき
ます.
3. 全ての間取りを評価し終えたら「次の世代」ボタンを押します.
4. 計算が終わるとまた次の評価を行ってください.1回の実験で複数回程
度繰り返します.システムA,Bの実験があり,1回当たり 15分を目標
に評価をお願いします.
• その他:途中での質問もかまいません,操作の時間は 1つのシステム実験に
15分から 20分を目安としてください.
91

6.2 評価実験
図 6.3: 実験風景
6.2.1 各目的値の結果
実験 1,2の結果として 4目的のフィットネス値-世代数の関係を芸術情報系学生
グループは図 6.4,建築設計実務者グループは図 6.5でそれぞれ表した.値はグルー
プそれぞれ 5名の平均である.実験 1とは,まず 4目的最適化を 2世代行い,次に
4目的とユーザ評価による最適化を 1世代行い,それを 5回繰り返す合計 15世代の
実験である.実験 2とは,まず 4目的最適化を 10世代行い,次に 4目的とユーザ評
価による最適化を 5世代行う合計 15世代の実験である.なお,建築系学生グルー
プの実験時にシステムに不具合があったための,そのデータは使用しなかった.
芸術情報系学生グループの実験 2(図 6.4(b))の第 11世代以降の目的 1(床面
積),目的 2(部屋形状),目的 3(動線)のフィットネス値の上昇が顕著に見られ
る.一方,建築設計実務者グループの実験 2(図 6.5(b))では反対に下降している.
92

(a)実験 1
(b)実験 2
図 6.4: 芸術情報系学生グループ 5名平均:世代-目的値(フィットネス)グラフ.
目的値は 1が最良.
93

(a)実験 1
(b)実験 2
図 6.5: 建築設計実務者グループ 5名平均:世代-目的値(フィットネス)グラフ.
目的値は 1が最良.
6.2.2 アンケート結果
アンケート(付録参照)の 7項目についての結果を表 6.1に,システム(実験)
A・Bについての結果を表 6.2にまとめた.またこれらを図 6.6,図 6.7,図 6.8に
94

表した.次に,各項目についてグループ別の特徴を述べる.
• 操作は簡単だった(図 6.6(上)):両学生のグループで全員が「強くそう思
う」,建築実務者グループでは概ね「そう思う」の傾向が見られた.
• 評価するのは簡単だった(図 6.6(中)):芸術情報系学生は「そう思う」,建
築系学生は「どちらでもない」,建築実務者は「そう思わない」にグラフの
山がある.
• 最終的に又は途中であなたの欲しい間取りができた(図 6.6(下)):芸術情
報系学生は全体に分散しているが,建築系学生と建築実務者は「そう思う」
に山がある.
• 最終的に又は途中で妥当な複数の間取りができた(図 6.7(上)):芸術情報
系学生は全体に分散しているが,建築系学生と建築実務者は全員が「そう思
う」を選んでいる.
• 最終的に又は途中で思ってもみなかった間取りができた(図 6.7(中)):芸
術情報系学生は「そう思う」と「強くそう思う」を選び,建築系学生は「ど
ちらでもない」を中心に分散し,建築実務者は「そう思わない」に山がある
が「そう思う」の方にも分散している.
• 刺激になった(図 6.7(下)):芸術情報系学生と建築実務者は「そう思う」方
に山があり,建築系学生は全体に分散している.
• このシステムに実用の可能性はあると思う(図 6.8(上)):3つのグループ共
に「そう思う」に山がある.
• 2つのシステムの違い(良い間取りが得られたまでの時間,待ち時間,その
他)が感じられましたか?1,2の順序で実験(図 6.8(中)):全体として見
ると「ほぼ同じ」と「システムBが良い」付近を多く選んでいる.
• 2つのシステムの違い(良い間取りが得られたまでの時間,待ち時間,その
他)が感じられましたか?2,1の順序で実験(図 6.8(下)):建築系学生の
一人を除いて,「システム Bが少し良い」と「システム Bが良い」を選んで
いる.
95

表 6.1: アンケート結果1.凡例:(1)まったくそう思わない,(2)そう思わない,
(3)どちらでもない,(4)そう思う,(5)強くそう思う.単位は人.
芸術情報系学生グループ (1) (2) (3) (4) (5)
操作は簡単だった 0 0 0 0 5
評価するのは簡単だった 0 0 1 3 1
最終的に又は途中であなたの欲しい間取りができた 0 2 1 2 0
最終的に又は途中で妥当な複数の間取りができた 1 0 1 2 1
最終的に又は途中で思ってもみなかった間取りができた 0 0 0 2 3
刺激になった 0 1 1 3 0
このシステムに実用の可能性はあると思う 0 0 2 3 0
建築系学生グループ (1) (2) (3) (4) (5)
操作は簡単だった 0 0 0 0 5
評価するのは簡単だった 0 1 2 1 1
最終的に又は途中であなたの欲しい間取りができた 0 0 1 4 0
最終的に又は途中で妥当な複数の間取りができた 0 0 0 5 0
最終的に又は途中で思ってもみなかった間取りができた 0 1 2 1 1
刺激になった 0 1 2 0 2
このシステムに実用の可能性はあると思う 0 0 2 3 0
建築設計実務者グループ (1) (2) (3) (4) (5)
操作は簡単だった 0 0 1 2 2
評価するのは簡単だった 1 2 1 0 1
最終的に又は途中であなたの欲しい間取りができた 0 1 0 4 0
最終的に又は途中で妥当な複数の間取りができた 0 0 1 4 0
最終的に又は途中で思ってもみなかった間取りができた 0 3 0 1 1
刺激になった 0 0 1 2 2
このシステムに実用の可能性はあると思う 0 0 2 2 1
合計 (1) (2) (3) (4) (5)
操作は簡単だった 0 0 1 2 12
評価するのは簡単だった 1 3 4 4 3
最終的に又は途中であなたの欲しい間取りができた 0 3 2 10 0
最終的に又は途中で妥当な複数の間取りができた 1 0 2 11 1
最終的に又は途中で思ってもみなかった間取りができた 0 4 2 4 5
刺激になった 0 2 4 5 4
このシステムに実用の可能性はあると思う 0 0 6 8 1
96

表 6.2: 2つのシステムの違い(良い間取りが得られたまでの時間,待ち時間,そ
の他)が感じられましたか?凡例:(1)システムAが良い, (2)システムAが少し
良い, (3)ほぼ同じ, (4)システムBが少しよい, (5)システムBがよい.単位は人.
(1) (2) (3) (4) (5)
芸術情報系学生グループ
1,2の順序で実験 0 0 2 0 1
2,1の順序で実験 0 0 0 2 0
建築系学生グループ
1,2の順序で実験 0 0 1 2 0
2,1の順序で実験 0 1 0 1 0
建築設計実務者グループ
1,2の順序で実験 0 0 0 2 0
2,1の順序で実験 0 0 0 1 2
合計
1,2の順序で実験 0 0 3 4 1
2,1の順序で実験 0 1 0 4 2
97

図 6.6: グループ別アンケート結果グラフ 1.
98

図 6.7: グループ別アンケート結果グラフ 2.
99

図 6.8: グループ別アンケート結果グラフ 3.
100

次に,記述式アンケートのコメントを以下にまとめる.なお,重複するコメン
トは省略した.
• あなたが評価のために注意した事項(評価基準)は何ですか?(複数回答可)
– 極端な形(細長いなど)の室空間ができないように考慮した.(1名)
– 水まわりの位置,リビングの広さ,リビングとダイニングの関係,リビ
ング・水まわりの採光・通風.(1名)
– 4つの部屋の広さ,位置.(1名)
– 部屋同士のアクセス,広さ,最初に入る部屋,採光など.(1名)
– 採光がしやすいものか.一定の動作ができる面積が確保されているか.
(1名)
– 水まわりの位置,大きさ.南面に接する部屋が水まわり以外のもの.南
北,それぞれ一面に部屋がないもの.玄関の位置に水まわりやBRがな
いもの.(1名)
– 間取り.廊下からLR,LRから各室への出入り口.採光(年面を水また
はDK等ですべてつぶさない).廊下からの出入口(LDとつながる).
(1名)
– 水まわりの位置,規模,形状.ベッドルームの大きさとDK・LRとの
関係.(1名)
– 機能的にあり得ない状態を「1」とした(1グリッド巾のもの).水まわ
りなどでの必要な大きさと大きく外れるもの(大きすぎる,小さすぎ
る)を低い評価とした.部屋の南北など,個人の好みが分かれる所は極
力評価しなかった.(1名)
– はじめは単純に 1つ 1つを見て,それぞれについてどんな間取りか判断
しようといたのですが,途中からそれでは終わらないと思い,少し自分
の評価基準を入れて判断しました.1.水まわりをDKが隣合せの方が良
い,2.水まわりとBRが隣合せの方が良い.(1名)
– 各々の部屋の広さ(リビングは広め,ベッドルームは狭め).部屋の位
置(北と南を強く意識しました).(1名)
– それぞれの部屋の大きさ(縦横比).BR,水だけが通路側になっていな
いか.(1名)
101
– 部屋間の移動は便利か.極端な広さの偏りが出ないようにした.(1名)
– 部屋の大きさが極端でないこと.LRとDKが面していること.LRが
窓(南)側にあること.(1名)
– 水場の大きさと位置.ベッドルームの大きさ.リビングの大きさ.(1名)
• 操作性はどうでしたか?自由に記述ください.
– 簡単だった.
– 扱いやすかった.
– 軽快で良かったと思います.
– 5段階評価で考えやすかったが慣れてくると 10段階でも良いのでは.(1
名)
– 画像から実像を頭の中に描いてイメージする必要,時間が要るのでその
意味では大変だった.(1名)
– 操作性は問題ないのですが,だんだん同じプランが複数出てくるように
なって,それらを分けようと荒く判断をして並べ替えをするのですが,
その時に同じプランがまとまってくれなかったのが,少しわかりにくい
と思いました.(1名)
– わかりやすかった.(1名)
– 特に問題はありませんでした.(1名)
– 操作は簡単で比較しやすかったが,もう少し細かい分類(複数の比較項
目)レベルで比較できるオプションが欲しいと思った.(1名)
• 表示は 2D,3Dのどちらをどの程度使用しましたか?
– 2Dを使用した.3Dの方が空間を想像しやすかったが間取り同士を比較
する時に面積の違いがわかりにくい印象を得た.(1名)
– 2Dのみ使用.(複数名)
– 2Dが 7割,3Dが 3割.(1名)
– ほぼ 2D.(1名)
– ほぼ全て 3D.(1名)
102

– 2Dのみ(3Dになるとイメージが縛られ,窓,入口,廊下など,その他
のイメージを想像し難くなると思ったため).(1名)
• 全体システムについての問題点・改良点,アドバイスがありましたらお願いします.
– 空間として想像するのが少し難しかった.例えば,家具の大きさがわか
るものが画面上にあれば,よりスケール感がつかみやすくなるのではな
いかと感じた.
– 玄関などもっと具体性を増した方がよいと思う.(1名)
– 3Dの方がもう少し立体的だともっと間取りの違いがわかりやすかった
かと感じました.(1名)
– DR,LRの違いをつけても良いかもしれません.→個人的にはあまり
違いをつけませんでした.(1名)
– BR南面パターンが少なかったように思う.1つのテーマに沿って答え
るように出来れば(リビングが南面しない時のパターン作りなど).(1
名)
– 4つの機能での分類で限定されているため「空」があるものほど魅力的
な感じがする.5段階評価の中にも多種の評価理由があるので,その部
分も踏まえて統計できればこのシステムの完成度も増すのではないか.
(1名)
– 水廻りについてはサイズを 6~12とか,ある範囲で絞った方が良いので
は.1グリッド巾のでない様にすることができればベター.(1名)
– テストが進むにつれて,プランが絞られてくると思うのですが,21あ
るプランを同じように何度も見ていると頭が疲れてきて微妙な違いの
判断をするのがつらくなってきました.進むにつれて,プラン数は減っ
てきてはだめなんでしょうか?(1名)
– 3Dの場合,もう少しリアルな表現があるといいと思います.例えば陰
影です.間取りよりも家具の配置システムの方があると便利だと思いま
した.(1名)
– 数字が 5,4,3,2,1になっていると並び替え時に見やすいかもしれません.
(1名)
103

– もっと広さのイメージが持ちやすい目安のようなものがあると助かりま
す(日頃,メートルで部屋や空間を考えることが少ないので).(1名)
– 各部屋の大きさはある程度満足が得られましたが,配置のパターンに多
様性が無く似たような配置ばかり出ました.(1名)
– 同じ間取りが表示されることで,無駄な再試行が必要になってしまう.
入口,窓,廊下の配置も含めた上で,このシステムを使ってみたい.(1
名)
• 質問その他ありましたら自由にご記入ください
– 非常に可能性を感じます.これからの発展,期待しています.(1名)
– 最初の段階の方のプランは通常しないような間取りの組合せなんです
が,これやってみたいとか見てみたいなというのが結構あって,まった
く何もない状態からのプランを作る 1つのやり方として面白いなと思い
ました.(1名)
– Bのシステム(実験 1)で途中良い間取りが複数でたのですが,最後に
はほとんど同じになってしまいました.(1名)
104

6.3 考察
各目的(フィットネス)値
芸術情報系学生グループの実験 2(図 6.4(b))の第 11世代以降の目的 1(床面
積),目的 2(部屋形状),目的 3(動線)のフィットネス値の上昇が顕著に見られ,
建築設計実務者グループの実験 2(図 6.5(b))では反対に下降しているのは,芸術
情報系学生が評価においても 4目的を強く意識し,一方建築実務者は 4目的以外
の事項についても判断基準に取り込んだ結果という推測もできる.
アンケート
アンケートの各項目の回答について考察を行う.
• 操作は簡単だった(図 6.6(上)):システムの操作性については概ね問題な
いようである.
• 評価するのは簡単だった(図 6.6(中)):建築計画の経験があるほど間取り
の評価を難しく感じている傾向が見られる.多様な評価基準を持つほど評価
は難しくなるだろう.
• 最終的に又は途中であなたの欲しい間取りができた(図 6.6(下)):芸術情
報系学生にはそれほど欲しい間取りが得られたと感じられなかったのは建築
計画の経験の無さによることが原因なのだろうか.
• 最終的に又は途中で妥当な複数の間取りができた(図 6.7(上)):この項目
についても前項同様,芸術情報系学生の評価が悪い.これも建築計画の経験
の無さによることが原因なのだろうか.
• 最終的に又は途中で思ってもみなかった間取りができた(図 6.7(中)):こ
の項目は前項,前々項と反対に建築計画経験の無いグループほど「思っても
見なかった間取り」があったと思っている.建築計画経験があれば既に多く
の間取りパターンを知っているので当然の結果だとも言える.
• 刺激になった(図 6.7(下)):はっきりとした傾向は見られないが全体的に
見て「どちらでもない」~「そう思う」と感じているようである.
105
• このシステムに実用の可能性はあると思う(図 6.8(上)):3つのグループ共
に概ね「そう思う」と感じている.
• 2つのシステムの違い(良い間取りが得られたまでの時間,待ち時間,その
他)が感じられましたか?(図 6.8(中),(下)):1,2の順序で実験と 2,1
の順序で実験共に「ほぼ同じ」~「システム(実験)Bが少し良い」の傾向
が見られる.システムBは後に行った実験なので被験者はシステム操作か評
価の「慣れ」によって 2つのシステムの差を感じた可能性が高い.なお,実
験の開始前には 5分程度の操作練習を行っている.
• あなたが評価のために注意した事項(評価基準)は何ですか?(複数回答可):間取り計画に不慣れな被験者のために,どのような観点で評価すべきものな
のかも実験の前に説明した.建築系学生と建築実務者のグループへも条件を
同じにするために同じ説明をした.そのためか説明した評価観点を強く意識
した評価となってしまった.
• 操作性はどうでしたか?自由に記述ください:これについては概ね問題ないとの回答を得た.また,評価方法のヒントとなる意見も頂いた.
• 表示は 2D,3Dのどちらをどの程度使用しましたか?:ほとんどが 2Dを使用
している.今回の計画の目はが平面プランニングであるから 2D表示が基本
であるのは自然である.
• 全体システムについての問題点・改良点,アドバイスがありましたらお願いします:スケール感を把握するための仕組み,例えば家具などを大きさがわ
かるものの表示の希望があった.
• 質問その他ありましたら自由にご記入ください:指摘のあった通り,実験で用いたシステムは世代が進むにつれて個体群の中に同じ間取りが多くなる傾
向があった.これは直ぐに解決すべき問題である.
システム全体について
被験者の本システムに対する印象は概ね良好なものであったと言える.ユーザ
の建築計画習熟度の違いによって反応の異なる項目もあったが,本システムは幅
広いユーザ層を対象にできる手応えを得た.一方,問題や課題も残っている.例え
106

ば間取り図にスケール感がないと言った直ぐに解決できるようなものから,間取
りの多様性が生まれにくいと言った多目的最適化の根本的な問題まである.また,
建築間取り図は瞬間的に見た印象だけで判断できるような問題でないため,間取り
を 5段階で総合的評価することに被験者も疑問を感じているようであった.EMO
部で設定した定量的要素の目的をユーザが再度判断しなくても良いような仕組み
が必要である.また 5段階評価のGUIではなく,間取りの情報を直接的にユーザ
が指定や調整ができるようなインタラクションを導入する発展研究も考えられる.
107

第7章 考察と今後の課題
108

空間生成アルゴリズム
提案の空間生成アルゴリズムを今後改良していくための理論的背景として,ボ
ロノイ図との類似性の視点から提案アルゴリズムを解釈することが有用であると
思われる.種座標間の距離に応じて,あるいは他から成長して来る生成空間との
隙間距離に応じて成長速度を制御するなど,将来複雑な成長ルールを導入した場
合でも,対応するボロノイ図の距離の観点から考察することで生成される空間形
状が理論的に解析できる可能性がある.
この空間生成アルゴリズムによって作成できる間取り数がまだ正確には判って
いない.理論的に検証を行うか実験的にその数をカウントする必要がある.
本研究の計画範囲は矩形のものとしたが,実際の建築計画では不整形な敷地や
住戸形状も当然ありうる.その場合にも適応できるのかどうか今後確かめる必要
がある.
建築計画の進化的多目的最適化
本研究のMOGAでの目的関数フィットネス値の最適化は比較的速いが,解(計
画案)の多様性までは確保できていない.これはパレート・ランキングでの優劣
判断で弱パレート解を劣勢解としているために,ニッチングにおける比較対象の
同ランクの個体数が少ないことに起因している可能性が高い.また,研究ステッ
プとして定性的目的に対応するための IEC導入することを前提に個体数を 21とし
たが,これは通常のEC手法に比べて少ない個体数であり,この点も解の多様性に
影響している可能性がある.これらの問題についてのパラメータ調整や改良,さ
らにMOGA以外の EMOアルゴリズムを使用した場合の検証も行う必要がある.
実用的な間取りとして 6部屋+住戸内廊下の配置計画も問題なく最適化が行わ
れた.住戸内廊下は空間生成部で他の6部屋と同様の成長アルゴリズムとルール
によって生成され,最適化部では面積や形状の設定値が異なるもののそれ以外は
同じ方法での最適化を行っている.目標面積や形状に関する目的の変数に違いは
あるものの,その他は部屋と条件の違いは無い.にもかかわらず廊下としての形
状や機能が十分に形成されている.住戸内廊下はその住戸内廊下の一端が共同廊
下からのアプローチ,つまり玄関と成って,それが台所や居間へと繋がっている,
あるいは部屋同士を間接的に繋ぐ役目も担っていることもある.また,4部屋の場
合と比べて 6部屋と住戸内廊下の場合の方が 6目的の最適化に進展が見られるが,
109

部屋数が増えたことや住戸内廊下を設置することによって間取り(個体)間の差
が大きく現れることが要因であると考えられる.
4部屋の配置計画,6目的の場合での本システムは最適化が行われなかった.こ
れを解決するための多数目的問題の研究に取り組む必要がある.
本研究はパレート・アプローチによる多目的最適化を行っているが,この手法
が重み付けによる単目的最適化と単純に優劣の判断は出来ない.単目的化する場
合の「重み」が最適化の前に決定しているのならば,単目的化による最適化は有
効であるが,多くの場合「重み」は未確定であろう.研究の発展として,支援シ
ステムの使用中に IECによって「重み」を決定する仕組みは発展研究として十分
考えられる.
建築計画の対話型進化的多目的最適化
4目的のみの最適化では試行毎に収束する間取りが大きく違うので,種の初期値
が重要であると考えられる.人間評価を組み合わせる大きな目的は「好み」を間
取りに反映させることで,設定している 4目的では直接的に決定できない「部屋
の位置」がここでは好みにあたると考えられる.更に人間評価の回数を 5回以下
にできる可能性もあり,最初に大まかな部屋の位置を手動で指定することも考え
られる.今後も IEC手法の EMOへの組み込み組み合わせについて研究を続ける
必要がある.少ないユーザ評価回数によって多目的空間での進化の方向性を決定
できるような手法の導入も考えられる.
本研究が将来的に多数目的の解決策としての対話型 EMOの研究に繋がる可能
性もある.EMOにおける目的数が多くなり過ぎると進化が止まる,あるいは遅れ
ることが指摘されており,その解決の方法として,関係性の強い目的同士をまと
める,あるいは重要性の低い目的をランキングに算入させないなどが考えられて
いる.IECの評価値による目的の扱い方の研究は今後のテーマとなるであろう.
建築計画支援システム
建築間取り図は瞬間的に見た印象だけで判断できるような問題でないため,間取
りを 5段階で総合的評価することに被験者も疑問を感じているようであった.EMO
部で設定した定量的要素の目的をユーザが再度判断しなくても良いような仕組み
110

が必要である.また 5段階評価のGUIではなく,間取りの情報を直接的にユーザ
が指定や調整ができるようなインタラクションを導入する発展研究も考えられる.
今後の発展
建築以外の空間計画分野(VLSIから都市スケールまで)への応用,造園などの
計画で要求されるような曲線を含む部分空間の計画,2階建て以上の建物の様な 3
次元空間の配置問題への研究発展が期待される.
111

第8章 結言
112

空間生成アルゴリズム
提案アルゴリズムと成長ルールは計画する空間配置問題に必要な,計画する部
分空間の大きさ,形状,位置が可変で計画範囲に無駄な隙間生じにくい計画案を
作成することができる.さらに最適化を行う探索空間を有効に限定することがで
きるため空間配置案生成にとって有用である.
建築計画の進化的多目的最適化
空間配置案生成部と EMO部による最適化部で構成される建築間取り案作成支
援システムを構築した.EMOによる 4目的最適化の場合には最適化された間取り
を得ることができ,提案アルゴリズムと成長ルールで生成された建築間取りが多
目的最適化されることを確認した.実用的な間取りとして 6部屋+住戸内廊下の配
置計画を行ったが,この場合も問題なく最適化が行われた.住戸内廊下も部屋と
同じアルゴリズムとルールによって配置でき,これによって間取りの実用性と多
様性が増した.本システムは一般に考えられる間取り案以外にも目的条件に近い
多様な間取り案を作成することが出来ると言える.これらの間取り案が直接的に
設計図面となるのではないが,複数の計画案を作る際のヒントとなり,十分に空
間計画支援システムの役割を果たすと考えられる.
建築計画の対話型進化的多目的最適化
擬似人間による評価実験で建築計画の対話型進化的多目的最適化ができること
が確かめられた.IECの EMOへの導入においてその組み合わせ方でユーザ評価
がユーザ評価をしない世代にも影響を与えることが確認された.ユーザ評価の回
数を少なくするために,早い世代(1~5世代)で擬似人間評価を行い,その後(6
世代以降)で 4目的のみのMOGAでの最適化は,擬似人間の目標とする間取りに
近く,かつ世代の後半では 4目的のみの最適化や擬似人間のみの最適化よりも良
いフィットネス値を得ることがこの問題設定では可能であることが判明した.
EMOに IECを組み入れる研究は未だ非常に少なく,個体の表現型に対して評価
を行う IECと EMOの組み合わせに関する研究は本研究で 3例目である.定性的
要素と複数の定量的要素を最適化するシステムは進化的計算研究に大きく貢献す
るであろう.
113

進化的計算手法の最終目標は応用されることであり,応用先である問題があっ
て始めて研究が成立する.また,全ての問題に対して有効な進化的計算アルゴリ
ズムは存在しない [69]とされており,応用先の問題によってアルゴリズムを変え
る,または調整をする必要がある.本研究においても建築(空間)計画問題の最
適化に際し独自の調整等を行っており,この点においても進化的計算研究に寄与
している.また,進化的多目的最適化,MOGAが応用先として建築(空間)計画
問題の最適化できることを示したことも進化的計算研究への寄与があると言える.
建築計画支援システム
被験者実験で用いた支援システムは研究の途中でのものであったためその性能
や設定がまだ十分でなかった.しかし被験者の反応(アンケート)から本システ
ムの可能性に手応えを得た.被験者の本システムに対する印象は概ね良好なもの
であったと言える.ユーザの建築計画習熟度の違いによって反応の異なる項目も
存在したが,本システムは幅広いユーザ層を対象にできる手応えも得ることがで
きた.一方,問題や課題も残っている.例えば間取り図にスケール感がないと言っ
た直ぐに解決できるようなものから,間取りの多様性が生まれにくいと言った多
目的最適化の根本的な問題まで存在する.
本論文で提案している手法は未だ萌芽的段階であると言える.本研究は限定的
な例での実験を行い,その結果を示し,考察することで進められており,研究の
適用範囲も建築計画全般を網羅するものではない.
現実的な建築計画での本システムの利用に際しては,その計画範囲,周辺状況,
計画する部屋等,計画空間モジュールをその用途に応じて適切に設定し,計画案
の成立のための目的も本研究で設定したもの以外のものを計画コンセプトに応じ
て設けることが出来る.そして建築計画支援システムで得られた建築計画ブロッ
ク・プランは利用者や計画者が必要に応じて修正や変更を行うことで計画図とす
る,またはそれらのプランからヒントを得て,設計へと反映させていくことを想
定している.更には,支援システムを使用したことよって新たに生じた要求や仮
説を基に条件や目的を再びシステムへ追加・修正することを繰り返すことによっ
て,より深いデザインへと繋げていくことが出来る [8, 9, 40].
114

謝辞
本研究のご指導を賜りました九州大学大学院芸術工学研究院 高木英行准教授,
西山徳明教授,九州大学大学院総合理工学研究院 谷本潤教授,被験者実験用シス
テム構築を請け負ってくださった(株)システムサンク 中島太朗氏,被験者実験
に参加してくださった(株)環・設計工房の所員の方々と九州大学芸術工学部環
境設計学科の学生の方々と九州大学芸術工学部及び芸術工学府芸術情報学科の学
生の方々,研究室活動で多くの助言やヒントをくださった高木研究室及び同PDゼ
ミのメンバー各位,そして私の博士後期課程での研究活動を支えてくださった全
ての方々に心より感謝致します.
なお,本研究の一部は文部科学省 21世紀COEプログラム及び科学技術振興機
構平成 19年度シーズ発掘試験から支援を受けました.
115

参考文献
[1] 浅野哲夫. 計算幾何: 理論の基礎から実装まで. 共立出版, 2007.
[2] Oliver Bandte. Short communication: A broad and narrow approach to in-
teractive evolutionary design-an aircraft design example. Appl. Soft Comput.,
Vol. 9, No. 1, pp. 448–455, 2009.
[3] A. M. Brintrup, H. Takagi, A. T., and J. J. Ramsden. Evaluation of sequential,
multi-objective, and parallel interactive genetic algorithms for multi-objective
optimization problems. J. of Biological Physics and Chemistry, Vol. 6, pp.
137–146, 2006.
[4] Carlos A. Coello Coello. An updated survey of evolutionary multiobjective
optimization techniques: State of the art and future trends. In Peter J.
Angeline, Zbyszek Michalewicz, Marc Schoenauer, Xin Yao, and Ali Zalzala,
editors, Proceedings of the Congress on Evolutionary Computation, Vol. 1, pp.
3–13, Mayflower Hotel, Washington D.C., USA, 6-9 1999. IEEE Press.
[5] Kalyanmoy Deb. Multi-Objective Optimization using Evolutionary Algo-
rithms. John Wiley & Sons Inc., Chichester, 2001.
[6] Kalyanmoy Deb, Samir Agrawal, Amrit Pratap, and T Meyarivan. A fast eli-
tist non-dominated sorting genetic algorithm for multi-objective optimization:
Nsga-ii. pp. 849–858. Springer, 2000.
[7] C. Fonseca and P. Fleming. Genetic algorithms for multiobjective optimiza-
tion: Formulation, discussion and generalization. In Proceedings of the 5th
International Conference on Genetic Algorithms (ICGA’93), pp. 416–423, Ur-
bane/Champaign, IL, USA, July 1993.
116

[8] 藤井晴行, 中島秀之, 諏訪正樹. 構成論的方法論から見たイノベーションの諸
相-建築を題材として. 情報処理学会誌, Vol. 49, No. 4, pp. 1571–1580, 2008.
[9] 藤井晴行. 環境共生を実現するための科学とデザインの多重螺旋的循環. 建築
雑誌, Vol. 123, No. 1583, pp. 22–24, 2008/12.
[10] 藤田喜久雄, 赤木新介, 島崎定雄. 矩形双対グラフを用いた最適区画配置手法
に関する研究. 日本機械学會論文集. C編, Vol. 60, No. 579, pp. 3662–3669,
19941125.
[11] 二村良彦, 川合敏雄, 堀越彌, 堤正義. PAD (Problem Analysis Diagram)に
よるプログラムの設計および作成. 情報処理学会論文誌, Vol. 21, No. 4, pp.
259–267, 19800715.
[12] A. Garrett, B. Carnahan, R. Muhdi, J. Davis, G. Dozier, M.P. SanSoucie, P.V.
Hull, and M.L. Tinker. Evacuation planning via evolutionary computation.
Evolutionary Computation, 2006. CEC 2006. IEEE Congress on, pp. 157–164,
0-0 2006.
[13] David E. Goldberg. Genetic Algorithms in Search, Optimization and Machine
Learning. Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA,
1989.
[14] 萩原将文. ニューロ・ファジィ・遺伝的アルゴリズム: エレクトロニクス実践
シリーズ. 産業図書, 1994.
[15] 原広司, 鈴木成文, 服部岑生, 太田利彦, 守屋秀夫. 新建築学大系〈23〉建築計
画. 彰国社, 1982.
[16] S. Hashimoto, K. Haruyama, T. Nakamura, T. Nakajima, and Y. Osana. Of-
fice layout support system using island model genetic algorithm. Evolutionary
Computation, 2005. The 2005 IEEE Congress on, Vol. 1, pp. 120–127 Vol.1,
Sept. 2005.
[17] S. Henmi, S. Iwashita, and H. Takagi. Interactive evolutionary computation
with evaluation characteristics of multi-iec users. Systems, Man and Cybernet-
ics, 2006. SMC ’06. IEEE International Conference on, Vol. 4, pp. 3475–3480,
Oct. 2006.
117

[18] Shinya Henmi, Sino Iwashita, and Hideyuki Takagi. Interactive evolutionary
computation with evaluation characteristics of multi-iec users. In Proceed-
ings of IEEE International Conference on Systems, Man, and Cybernetics
(SMC2006), pp. 3475–3480, Taipei, Taiwan, October 2006. IEEE.
[19] 五十嵐健夫, 松岡聡, 増井俊之. ユーザによるレイアウトの適応的認識. 情報処
理学会研究報告. HI, ヒューマンインタフェース研究会報告, Vol. 95, No. 70,
pp. 33–40, 19950720.
[20] 井本優, 岸本達也. 11003 共有領域の形成を考慮した集合住宅における住戸配
置支援システム (設計システム・図形処理,情報システム技術). 学術講演梗概
集. A-2, 防火,海洋,情報システム技術, Vol. 2007, pp. 411–412, 20070731.
[21] 井上貴智, 小浜芳朗, 高田豊文. 最適化手法を用いた建築平面計画に関する研
究. 機械学会最適化シンポジウム講演論文集, pp. 281–285, October 2000.
[22] Makoto Inoue and Hideyuki Takagi. Layout algorithm for an ec-based room
layout planning support system. In IEEE Conference on Soft Computing in
Industrial Applications (SMCia/08 ). IEEE, June 2008.
[23] 石渕久生, 塚本実孝, 能島裕介. 進化型多数目的最適化. 進化計算研究会 進化
計算シンポジウム 2007 講演論文集, pp. 47–50, 洞爺湖, 北海道, 12 2007.
[24] Hisao Ishibuchi, Noritaka Tsukamoto, and Yusuke Nojima. Evolutionary
many-objective optimization: A short review. Evolutionary Computation,
2008. CEC 2008. (IEEE World Congress on Computational Intelligence).
IEEE Congress on, pp. 2419–2426, June 2008.
[25] Jun H. Jo and John S. Gero. Space layout planning using an evolutionary
approach. Artificial Intelligence in Engineering, Vol. 12, pp. 149–162, 1998.
[26] R. Kamalian, Ying Zhang, H. Takagi, and A.M. Agogino. Reduced human fa-
tigue interactive evolutionary computation for micromachine design. Machine
Learning and Cybernetics, 2005. Proceedings of 2005 International Conference
on, Vol. 9, pp. 5666–5671 Vol. 9, Aug. 2005.
[27] 北野宏明. 遺伝的アルゴリズム. 産業図書, 1993.
118

[28] 国土交通省. スケルトン・インフィル住宅(SI住宅)の普及促
進に向けた環境整備: SI住宅に係る登記上の取扱いを明確化.
http://www.mlit.go.jp/kisha/kisha02/07/071220 .html, 2002.
[29] 小見山健次. 速習・設計製図の進め方 (1級建築士受験パーフェクトガイド).
彰国社, 1997.
[30] Krzysztof Kozminski and Edwin Kinnen. An algorithm for finding a rectangu-
lar dual of a planar graph for use in area planning for vlsi integrated circuits.
In DAC ’84: Proceedings of the 21st conference on Design automation, pp.
655–656, Piscataway, NJ, USA, 1984. IEEE Press.
[31] 桑川栄一, 渡邉勝正. 平面プラン作成支援における設計資産の活用–建築平面
プランを対象として (2005年情報学シンポジウム講演論文集–社会システムを
支える情報学) – (ポスターセッション). 情報学シンポジウム講演論文集, Vol.
2005, pp. 47–52, 2005.
[32] Azahar Machwe and Ian C. Parmee. Integrating aesthetic criteria with evo-
lutionary processes in complex, free-form design? an initial investigation. In
Proceedings of IEEE Congress on Evolutionary Computation (CEC2006), pp.
165–172, Vancouver, BC, Canada, June 2006.
[33] 増井俊之. 遺伝子アルゴリズムを用いた対話式図形配置. ヒューマンインタ
フェース, pp. 41–48, 1992.
[34] Keith B. Matthews, Susan Craw, Stewart Elder, Alan R. Sibbald, and Iain
MacKenzie. Applying genetic algorithms to multi-objective land use plan-
ning. In Darrell Whitley, David Goldberg, Erick Cantu-Paz, Lee Spector, Ian
Parmee, and Hans-Georg Beyer, editors, Proceedings of the Genetic and Evo-
lutionary Computation Conference (GECCO-2000), pp. 613–620, Las Vegas,
Nevada, USA, 10-12 July 2000. Morgan Kaufmann.
[35] 宗本晋作,加藤直樹,今村元一. 直交グラフ描画法を用いた室配置手法 : タブー
探索法を用いた対話型多目的最適化. 日本建築学会計画系論文集, No. 529, pp.
279–286, 20000330.
119

[36] 長尾光悦, 山本雅人, 鈴木恵二, 大内東. インタラクティブGAに基づく画像検
索システムの評価. 人工知能学会誌, Vol. 13, No. 5, pp. 720–727, 1998.
[37] T. Nakajima, S. Hashimoto, K. Haruyama, T. Nakamura, and Y. Osana.
Office layout support system using interactive genetic algorithm. Evolutionary
Computation, 2006. CEC 2006. IEEE Congress on, pp. 56–63, 0-0 2006.
[38] Shin-ichi Nakano. Enumerating floorplans with n rooms. IEICE Trans. on
Fundamentals, Vol. E85-A, No. 7, pp. 1746–1750, 2002.
[39] 中野雄, 高木英行. 対話型PSOにおける評価値量子化ノイズの影響. インテリ
ジェント・システム・シンポジウム(FANシンポジウム), pp. 325–328, 2007.
[40] 中島秀之, 諏訪正樹, 藤井晴行. 構成的情報学の方法論からみたイノベーショ
ン. 情報処理学会誌, Vol. 49, No. 4, pp. 1508–1514, 2008.
[41] 中矢真吾, 小出哲士, 若林真一. 適応的遺伝的アルゴリズムに基づくVLSIフ
ロアプランニングの手法 (〈特集〉システムLSIの設計技術と設計自動化). 情
報処理学会論文誌, Vol. 43, No. 5, pp. 1361–1371, 20020515.
[42] 中山弘隆, 岡部達哉, 荒川雅生, 尹禮分. 多目的最適化と工学設計 : しなやか
システム工学アプローチ. 現代図書, 2008.
[43] 日本建築学会建築計画委員会. 設計方法論: 設計方法 �. 彰国社, 1981.
[44] 日本建築学会建築計画委員会. 設計方法と設計主体: 設計方法 �. 彰国社,
1989.
[45] 日本建築学会. やさしくわかる建築・都市・環境のためのソフトコンピュー
ティング. 日本建築学会, 2005.
[46] 日本オペレーションズ・リサーチ学会. パレート最適解 - ORWiki.
http://www.orsj.or.jp/˜wiki/wiki/index.php/パレート最適解.
[47] 大崎美穂, 高木英行. 対話型EC操作者の負担軽減-評価値予測による提示イ
ンタフェースの改善. 人工知能学会誌, Vol. 13, No. 5, pp. 712–719, 1998.
[48] 太田利彦. 設計方法論. 丸善, 1981.
120

[49] 大塚正臣, 伊藤和人. フロアプランと高位合成を同時に行う LSI設計手法 (設
計・合成,組込技術とネットワークに関するワークショップ). 情報処理学会研究
報告. SLDM, [システムLSI設計技術], Vol. 2005, No. 27, pp. 25–30, 20050317.
[50] 岡部篤行, 鈴木敦夫. 最適配置の数理: シリーズ「現代人の数理」. 朝倉書店,
1992.
[51] A. Okabe, B. Boots, K. Sugihara, and S. N. Chiu. Spatial Tessellations:
Concepts and Applications of Voronoi Diagrams. John Wiley & Sons Inc.,
Chichester, 2000.
[52] T. Okabe, Y. Jin, and B. Sendhoff. A critical survey of performance indices
for multi-objective optimisation. Evolutionary Computation, 2003. CEC ’03.
The 2003 Congress on, Vol. 2, pp. 878–885 Vol.2, Dec. 2003.
[53] M. A Rosenman and J. S. Gero. Evolutionary Design by Computers, chapter
15. Evolving designs by generating useful complex gene structures, pp. 345–
364. Morgan Kaufmann, San Francisco, 1999.
[54] 櫻井一弥, 野村希晶, カトフマリン, 伊藤邦明. 段階生成グリッド法を用いた室
配置システムに関する研究. 日本建築学会環境系論文集, No. 577, pp. 63–69,
20040330.
[55] 三宮信夫, 喜多一, 玉置久, 岩本貴司. 遺伝アルゴリズムと最適化. 朝倉書店,
1998.
[56] M. Sathe, G. Rudolph, and K. Deb. Design and validation of a hybrid inter-
active reference point method for multi-objective optimization. Evolutionary
Computation, 2008. CEC 2008. (IEEE World Congress on Computational
Intelligence). IEEE Congress on, pp. 2909–2916, June 2008.
[57] J. D. Schaffer. Multiple objective optimization with vector evaluated genetic
algorithms. In Proceedings of 1st International Conference on Genetic Algo-
rithms and Their Applications, pp. 93–100, 1985.
[58] 四方博実, 村石嘉人, 関直康, 守谷正一. LSIのフロアプラン自動化アルゴリズ
ム. 全国大会講演論文集, Vol. 39, No. 3, pp. 1628–1629, 19891016.
121

[59] 蘇剣鳴, 櫻井一弥, 野村希晶, 金起弘, 伊藤邦明. 周辺環境と室ユニットの関係
を重視した 3次元室配置システムに関する研究. 日本建築学会計画系論文集,
No. 595, pp. 221–228, 20050930.
[60] 田口善弘, 高木英行, 三井秀樹. 複雑性のキーワード: インターネット時代の
数学シリーズ. 共立出版, 2000.
[61] Hideyuki Takagi. Interactive evolutionary computation: Fusion of the capa-
bilities of ec optimization and human evaluation. Proceedings of the IEEE,
Vol. 89, pp. 1275–1296, 2001.
[62] 谷垣進也, 谷明勲, 山邊友一郎. 多重最適化による動線及び室形態の最適化シ
ステム-室接続に複数経路を有する場合における住宅室配置の最適化-. 第
30回情報・システム・利用・技術シンポジウム論文集,論文, pp. 7–12, 東京,
12 2007. 日本建築学会,情報システム技術委員会.
[63] 谷口典之, 亀井且有. 2-415 複数パレットを必要とするオーダーに対するパレ
タイジングの最適化に関する研究. インテリジェントシステム・シンポジウム
講演論文集, Vol. 12, pp. 523–526, 20021114.
[64] 徳田光弘, 本間俊雄, 松永安光, 有吉弘輔, 西村一成, 平野公平, 小佐見友子. 遺
伝子操作を導入した模擬育種法による低層集合住宅配置計画における設計支
援の可能性. 日本建築学会計画系論文集, No. 611, pp. 83–91, 20070130.
[65] 上田佳孝, 古市愼治, 向野守, 他. ディジタルスチルカメラ用システム LSIの
レイアウト設計技術 (開発・生産技術特集). 三洋電機技報, Vol. 34, No. 2, pp.
12–20, 2002.
[66] VIA Technologies Inc. VIA Nano Processor, Introductory White Paper.
http://www.via.com.tw/en/downloads/whitepapers/processors/WP080529VIA Nano.pdf,
2008.
[67] Heyong Wang, Kang Hu, Jing Liu, and Licheng Jiao. Multiagent evolutionary
algorithm for floorplanning using moving block sequence. Evolutionary Com-
putation, 2007. CEC 2007. IEEE Congress on, pp. 4372–4377, Sept. 2007.
122
[68] 渡邉真也, 廣安知之, 三木光範. 多目的方形パッキング問題に対する進化的手
法の有効性 (アルゴリズム). 電子情報通信学会論文誌. D-I, 情報・システム,
I-情報処理, Vol. 86, No. 11, pp. 791–799, 20031101.
[69] D.H. Wolpert and W.G. Macready. No free lunch theorems for search. Tech-
nical Report SFI-TR-95-02-010, Santa Fe, NM, 1995.
[70] 山本洋一. 設計製図のまとめ方―一級建築士合格 . オーム社, 1996.
[71] Xiufen Zou, Yu Chen, Minzhong Liu, and Lishan Kang. A new evolutionary
algorithm for solving many-objective optimization problems. Systems, Man,
and Cybernetics, Part B, IEEE Transactions on, Vol. 38, No. 5, pp. 1402–
1412, Oct. 2008.
123

公表論文
【学術論文】
1. 井上誠, 高木英行,「空間配置案生成手法と進化的多目的最適化手法を用いた
建築間取り案作成支援システム」, 人工知能学会論文誌, 24巻 1号, pp.25-33
(2009年 1月).
【国際会議】
1. Makoto Inoue and Hideyuki Takagi, “Layout Algorithm for an EC-based
Room Layout Planning Support System,” IEEE Conference on Soft Com-
puting in Industrial Applications (SMCia/08), Muroran, Hokkaido, Japan,
pp.165-170 (June 25-27, 2008).
【国内大会・シンポジウム】
1. 井上誠, 高木英行,「進化的空間計画のための計算幾何モデル」電子情報通信
学会総合大会, D-8-29, p.137 (2008年 3月 18-21日).
2. 井上誠, 高木英行, 「空間配置生成手法と進化的多目的最適化手法を用いた
建築間取り最適化 -集合住宅における 6部屋と住戸内廊下の配置-」, 日
本建築学会第 31回情報・システム・利用・技術シンポジウム論文集, 報告,
pp.163-166 (2008年 12月 4-5日).
124

付録:被験者実験書類
アンケート
お名前:
建築設計の経験(プロの場合 年,建築設計の授業履修学生,経験なし)
1=まったくそう思わない,2=そう思わない,3=どちらでもない,4=そう思
う,5=強くそう思う
●操作は簡単だった 1-2-3-4-5
●評価するのは簡単だった 1-2-3-4-5
●最終的に,又は途中であなたの欲しい間取りができた 1-2-3-4-5
●最終的に,又は途中で妥当な複数の間取りができた 1-2-3-4-5
●最終的に,又は途中で思ってもみなかった間取りができた 1-2-3-4-5
●刺激になった 1-2-3-4-5
●このシステムに実用の可能性はあると思う 1-2-3-4-5
■ 2つのシステムの違い(良い間取りが得られたまでの時間,待ち時間,その他)
が感じられましたか?なければ中間の「ほぼ同じ」を選んでください.
システムAが良い-システムAが少し良い-ほぼ同じ-システムBが少しよい-
システムBがよい
■あなたが評価のために注意した事項(評価基準)は何ですか?(複数回答可)
■操作性はどうでしたか?自由に記述ください.
■表示は 2D,3Dのどちらをどの程度使用しましたか?
■全体システムについての問題点・改良点,アドバイスがありましたらお願いし
ます.
■質問その他ありましたら自由にご記入ください
この度は実験に参加下さりありがとうございました.
125


















