
notes part 3 - UBCcourses.ece.ubc.ca/359/notes/notes_part3.pdfEECE 359 - Signals and Communications:...
50
EECE 359 - Signals and Communications: Part 3 Spring 2014 Introduction to probability with applications in communications 1 Probability theory is useful in many areas of engineering in which uncertainty plays an important role, e.g. noisy signals in a communication system. Example: Bits output by a binary symmetric source (BSS). Binary symmetric source (BSS) BSS output is a sequence of bits, each equal to ‘0’ or ‘1’. The chance for a ‘0’ is the same as for a ‘1’. The source has no memory. A random experiment is one in which the outcome cannot be predicted with certainty, e.g coin tossing. Defn: The sample space, S , is the set of all possible outcomes of the experiment. 1 These slides are based on lecture notes of Professors L. Lampe, C. Leung, and R. Schober SM 1
Transcript of notes part 3 - UBCcourses.ece.ubc.ca/359/notes/notes_part3.pdfEECE 359 - Signals and Communications:...
EECE 359 - Signals and Communications: Part 3 Spring 2014
Introduction to probability with applications
in communications1
Probability theory is useful in many areas
of engineering in which uncertainty plays
an important role, e.g. noisy signals in a
communication system.
Example: Bits output by a binary symmetric
source (BSS).
Binary symmetric
source (BSS)
BSS output is a sequence of bits,
each equal to ‘0’ or ‘1’. The
chance for a ‘0’ is the same as for
a ‘1’. The source has no memory.
A random experiment is one in which the
outcome cannot be predicted with certainty,
e.g coin tossing.
Defn: The sample space, S, is the set of all
possible outcomes of the experiment.1These slides are based on lecture notes of Professors L.
Lampe, C. Leung, and R. Schober
SM 1

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: For an experiment in which two
coins are tossed,
S = {(H,H), (H,T ), (T,H), (T, T )}.
Example: For an experiment in which two
dice are tossed,
S = {(i, j) : i, j = 1, 2, 3, 4, 5, 6}
where i (j) appears on the first (second) die.
Defn: An event, A, is some subset of S.
Event A is said to have occurred if the
outcome of the experiment is contained in
A.
An axiomatic approach to probability theory
is possible. Here, we adopt a commonly used
engineering approach.
SM 2

EECE 359 - Signals and Communications: Part 3 Spring 2014
Defn: The probability of an event A is
P (A) = limn→∞
(nA
n
)
(1)
where nA is the number of occurrences of A
in n trials.
Example: Suppose that we toss a coin 100
times and a head (H) comes up 51 times.
Then, P (H) ≈ 0.51.
Example: Consider a sequence of three bits
output by a BSS. What is the probability that
the sequence contains two consecutive 0’s?
Example: Lotto 6/49. What is the probability
of a given ticket winning the jackpot?
From (1), we conclude that
0 ≤ P (A) ≤ 1 (2)
for any event A. If A = ∅, i.e. a null
SM 3

EECE 359 - Signals and Communications: Part 3 Spring 2014
event, P (A) = 0; if A = S, i.e. a sure event,
P (A) = 1.
Defn: The union of two events A and B,
denoted by A ∪B, is the event consisting of
all outcomes that are either in A or in B or
in both A and B.
Example: In the two coin tossing experiment,
let A be the event that the first coin shows
a head, i.e. A = {(H,H), (H,T )} and let
B = {(T,H)}. Then,
A ∪B = {(H,H), (H,T ), (T,H)}
i.e. the event that we have one head on
either coin.
Defn: The intersection of two events A and
B, denoted by AB or A ∩B, is the event
consisting of all outcomes that are in both A
and B.
SM 4

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: In the two coin tossing experiment,
let A be the event that at least one head
occurs, i.e. A = {(H,H), (H,T ), (T,H)}and let B be the event that at least one tail
occurs, i.e. B = {(H,T ), (T,H), (T, T )}.Then,
AB = {(H,T ), (T,H)}i.e. the event that we have exactly one head
and one tail.
Defn: Two events, A and B, are said to be
mutually exclusive or disjoint if AB is a null
event, i.e. AB = ∅.
Example: In the two coin tossing experiment,
let A be the event that the first coin shows
a head, i.e. A = {(H,H), (H,T )} and let B
be the event that the first coin shows a tail,
i.e. B = {(T,H), (T, T )}. Then,
AB = ∅.SM 5

EECE 359 - Signals and Communications: Part 3 Spring 2014
Fact: If two events, A and B, are mutually
exclusive, then
P (A ∪B) = P (A) + P (B) (3)
Proof:
Defn: The complement of an event A,
denoted by Ac, is the event consisting of
all outcomes in S that not in A. Thus, Ac
occurs if and only if A does not occur.
Example: In the one coin tossing experiment,
let A be the event that the coin shows a head.
Then, Ac is the event that the coin shows a
tail.
Note that Sc = ∅ since the experiment always
results in some outcome.
Fact: If B ⊂ A, then P (B) ≤ P (A).
SM 6

EECE 359 - Signals and Communications: Part 3 Spring 2014
Defn: The probability of a joint event, AB,
is
P (AB) = limn→∞
(nAB
n
)
(4)
where nAB is the number of occurrences of
the event AB in n trials.
Theorem:
P (A ∪B) = P (A) + P (B)− P (AB) (5)
Proof:
Defn: The conditional probability that an
event A occurs given that an event B has
occurred is
P (A|B) =P (AB)
P (B)(6)
SM 7

EECE 359 - Signals and Communications: Part 3 Spring 2014
provided P (B) > 0.
From (6), we have
P (AB) = P (A)P (B|A)
= P (B)P (A|B) (7)
Defn: Events A1, A2, . . . , An are said to
form a partition of the sample space S if
1. A1, A2, . . . , An are mutually exclusive, i.e.
Ai
⋂
Aj = ∅ for i 6= j.
2. A1 ∪A2 ∪ . . . ∪An = S.
Total Probability Theorem: LetA1, A2, . . . , An
form a partition of S. Then, for any event B,
P (B) =n∑
i=1
P (B|Ai)P (Ai) (8)
SM 8

EECE 359 - Signals and Communications: Part 3 Spring 2014
Using (7) and (8), we can write
Theorem (Bayes):
P (A|B) =P (B|A)P (A)
P (B)
=P (B|A)P (A)
∑ni=1P (B|Ai)P (Ai)
(9)
Example: Binary asymmetric channel
The input bit, X, is equally likely to be 0 or
1, i.e. P (X = 0) = P (X = 1) = 12.
Determine(a) P (X = 0|Y = 0).(b) P (X = 1|Y = 1).
SM 9

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: Breathalyzer
Suppose that 10% of the drivers on the
road after midnight are legally drunk. A
police officer stops a driver at random and
administers the breathalyzer test.
SM 10

EECE 359 - Signals and Communications: Part 3 Spring 2014
Suppose that
Pr{test indicates driver is drunk | driver is drunk}=0.95 and
Pr{test indicates driver is drunk | driver is not drunk}=0.01
What is the probability that the driver is drunk
given that the test is positive, i.e. indicates
the driver is drunk?
Solution:
Let A1 be the event that the driver is drunk,
A2 be the event that the driver is not drunk
and B be the event that the test is positive.
Then, from Bayes’ Theorem (9),
P (A1|B) =P (B|A1)P (A1)
P (B|A1)P (A1) + P (B|A2)P (A2)
=0.95× 0.1
0.95× 0.1 + 0.01× 0.9≈ 0.91
Defn: Two events A and B are said to be
SM 11

EECE 359 - Signals and Communications: Part 3 Spring 2014
independent if
P (AB) = P (A)P (B) (10)
Example: In the two coin tossing experiment,
let A be the event that the first coin shows a
head and let B be the event that the second
coin shows a tail. Then,
P (A) =1
2
P (B) =1
2
P (AB) =1
4
Thus, the event that the first coin shows
a head is independent of the event that the
second coin shows a tail.
SM 12

EECE 359 - Signals and Communications: Part 3 Spring 2014
Random variables
Defn: A real-valued random variable (rv) is a
function which associates a real number X(s)
with each possible outcome s in the sample
space S.
Example: In the coin tossing experiment,
X(H) = +1
X(T ) = −1
Cumulative distribution and probability
density functions
Defn: The cumulative distribution function
(CDF) of the rv X is
FX(x) = P (X ≤ x) (11)
Defn: The probability density function (pdf)
SM 13

EECE 359 - Signals and Communications: Part 3 Spring 2014
of the rv X is
fX(x) =dFX(x)
dx(12)
Properties of CDFs
• F (x) is a non-decreasing function.
• 0 = F (−∞) ≤ F (x) ≤ F (+∞) = 1
• F (a) is continuous from the right, i.e. for
any ε > 0,
F (a) = limε→0
F (a+ ε) (13)
• For any ε > 0,
F (a) = limε→0
∫ a+ε
−∞f(x)dx (14)
SM 14

EECE 359 - Signals and Communications: Part 3 Spring 2014
Properties of pdf’s
• f(x) is a non-negative function, i.e.
f(x) ≥ 0.
•∫ ∞
−∞f(x)dx = 1. (15)
Note that f(x) may exceed one; however, the
area under f(x) is always equal to one.
Discrete random variables
A discrete rv is one that takes on a finite or
countable number of possible values. Such a
rv is commonly defined by its probability mass
function (pmf)
pX(a) = P (X = a) (16)
SM 15

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: Binomial distribution
The binary symmetric channel (BSC) shown
below is a commonly used model in
communications.
InputX
0 0
1 1
OutputY
ε
ε
1 ε–
1 ε–
Errors affecting successive bit transmissions
on a BSC are independent.
Suppose that we transmit a block consisting
of n bits over a BSC with bit error probability
ε. What is the probability that k of these
n bits will be in received in error?
The probability of a specific error pattern with
exactly k bit errors (e.g. first k bits are in
error and the remaining n−k bits are correct)
SM 16

EECE 359 - Signals and Communications: Part 3 Spring 2014
is
εk(1− ε)n−k (17)
The number of error patterns with exactly k
bit errors is
(
n
k
)
∆=
n!
k!(n− k)!(18)
Hence, the probability that k of the n bits
will be in received in error is
P (X = k) =
(
n
k
)
εk(1− ε)n−k (19)
Equation (19) is referred to as the binomial
pmf.
Example: Poisson distribution
Consider the binomial pmf with nε = λ,
where λ is a constant, and n → ∞.
SM 17
EECE 359 - Signals and Communications: Part 3 Spring 2014
Then,
P (X = k) =n!
k!(n − k)!
(
λ
n
)k (
1 − λ
n
)n−k
=λk
k!
n!
(n − k)!
1
nk
(
1 − λ
n
)−k (
1 − λ
n
)n
=λk
k!
n!
(n − k)!
(
1
n − λ
)k (
1 − λ
n
)n
(20)
Using
limn→∞
(
1− λ
n
)n
= e−λ (21)
and taking the limit as n → ∞ of the RHSof (20), we have
P (X = k) =λk
k!e−λ, k = 0, 1, 2, . . . (22)
Equation (22) is referred to as the Poisson
pmf. The Poisson pmf is plotted below for
λ = 0.5, 1 and 2.
SM 18

EECE 359 - Signals and Communications: Part 3 Spring 2014
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7Poisson pmf with λ = 0.5
k
P(k
)
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Poisson pmf with λ = 1
k
P(k
)
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
0.35Poisson pmf with λ = 2
k
P(k
)
SM 19

EECE 359 - Signals and Communications: Part 3 Spring 2014
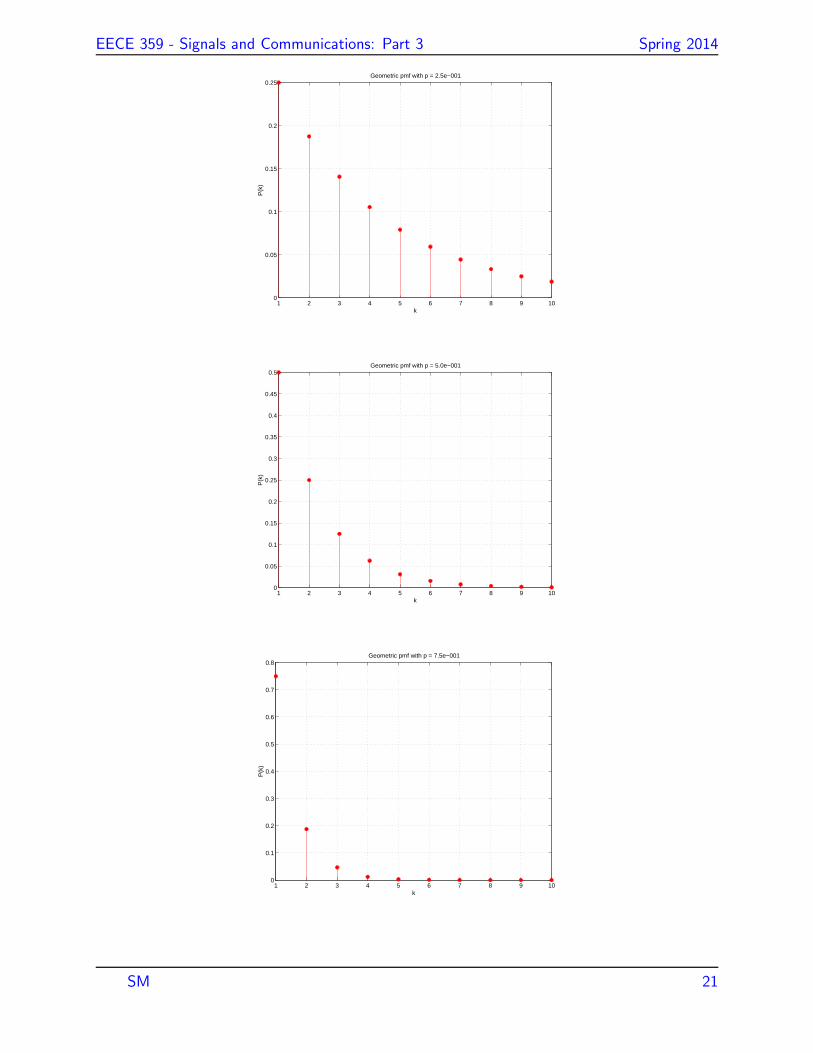
Example: Geometric distribution
Consider the transmission of a data packet
over a communication channel. If the
packet is not received successfully, the
sender retransmits the packet. This process
is repeated until the packet is received
successfully.
Suppose that packet errors are independent
and the probability that the packet is
successfully received on any transmission or
retransmission is p. Let X be the number of
transmissions required. Then,
P (X = k) = (1− p)k−1p, k = 1, 2, . . . (23)
Any rv with pmf given by (23) is referred to
as a geometric rv with parameter p.
The geometric pmf is plotted below for p =
0.25, 0.5 and 0.75.
SM 20
EECE 359 - Signals and Communications: Part 3 Spring 2014
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25Geometric pmf with p = 2.5e−001
k
P(k
)
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5Geometric pmf with p = 5.0e−001
k
P(k
)
1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Geometric pmf with p = 7.5e−001
k
P(k
)
SM 21

EECE 359 - Signals and Communications: Part 3 Spring 2014
Continuous random variables
A continuous rv is one which takes on
a continuum of values and is commonly
described by its probability density function
(pdf) or its cumulative distribution function
(CDF).
Example: Uniform distribution
The rv X is said to be uniformly distributed
over the interval (a, b), denoted by U(0, 1), if
its pdf is given by
fX(x) =
{
1b−a, a < x < b
0, otherwise.(24)
xa
1/(b-a)
b
f(x)
SM 22
EECE 359 - Signals and Communications: Part 3 Spring 2014
The uniform distribution is commonly used to
model quantization noise. We will also see
how it can be used to generate samples of
rv’s with arbitrary distributions.
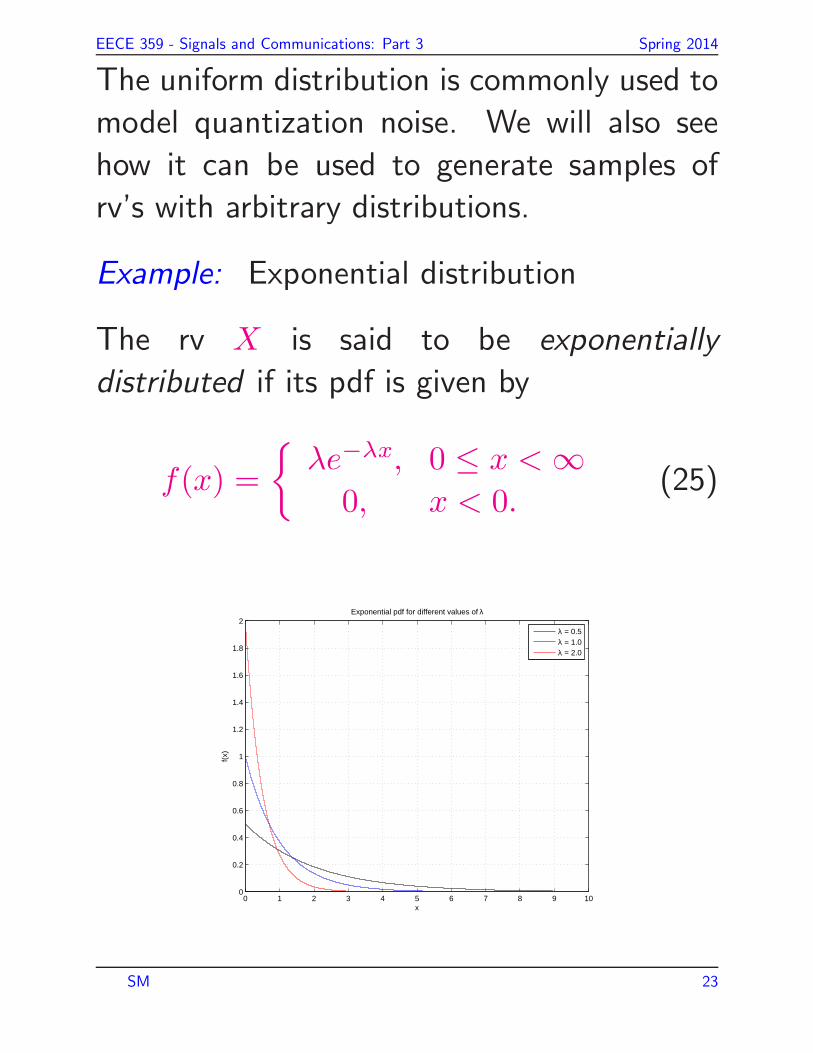
Example: Exponential distribution
The rv X is said to be exponentially
distributed if its pdf is given by
f(x) =
{
λe−λx, 0 ≤ x < ∞0, x < 0.
(25)
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Exponential pdf for different values of λ
x
f(x)
λ = 0.5λ = 1.0λ = 2.0
SM 23

EECE 359 - Signals and Communications: Part 3 Spring 2014
From (25), the CDF of the exponential
distribution is
F (x) =
{
1− e−λx, 0 ≤ x < ∞0, x < 0.
(26)
The exponential distribution is commonly
used to model the time between adjacent
arrivals (also referred to as the inter-arrival
time) in a queueing system; in this case,
the parameter λ represents the arrival rate of
customers to the system.
The exponential distribution has an
interesting memoryless property. It can be
shown that
Pr{X ≤ x+ x0|X > x0}
=
{
1− e−λx, 0 ≤ x < ∞0, x < 0.
(27)
SM 24

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: Gaussian or normal distribution
The Gaussian distribution, denoted by
N (µ, σ2), is one of the most important
distributions used in the analyses of
communication problems. Its pdf is given
by
f(x) =1√2πσ
e−(x−µ)2/2σ2,−∞ < x < ∞(28)
where µ is the mean, σ2 is the variance and
σ is the standard deviation.
−5 −4 −3 −2 −1 0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7zero mean Gaussian pdfs with variances σ2 = 0.5, 1, 2.0
x
f(x)
σ2 = 0.5
σ2 = 1.0
σ2 = 2.0
SM 25

EECE 359 - Signals and Communications: Part 3 Spring 2014
Important functions in error analyses:
The erfc(.) and Q(.) functions are defined
as:
erfc(α)∆=
2√π
∫ ∞
α
e−x2 dx (29)
Q(α)∆=
1√2π
∫ ∞
α
e−x2
2 dx (30)
The Q(.) function is the area under the “tail”
of a zero mean, unit variance Gaussian pdf.
−5 −4 −3 −2 −1 0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4zero mean, unit variance Gaussian pdf
x
SM 26

EECE 359 - Signals and Communications: Part 3 Spring 2014
Fact:
Q(x) =1
2erfc
(
x√2
)
(31)
In general, the values of these functions have
to be obtained numerically or looked up in
tables. Corresponding MATLAB functions
are erfc and qfunc.
Useful bounds for Q(.):
1√2πx
e−x2/2
(
1− 1
x2
)
< Q(x) <1√2πx
e−x2/2 (32)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 510
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
Q function and bounds
x
SM 27

EECE 359 - Signals and Communications: Part 3 Spring 2014
Fact: Suppose the random variable (rv) X is
Gaussian with mean µ and variance σ2, i.e.
X ∼ N (µ, σ2). Then
P (X ≥ a) = Q
(
a− µ
σ
)
(33)
Proof:
Note: By symmetry,
P (X ≤ a) = P (X ≥ 2µ− a)
= Q
(
µ− a
σ
)
(34)
SM 28

EECE 359 - Signals and Communications: Part 3 Spring 2014
Example: What is the probability that the
rv X ∼ N (µ, σ2) deviates from its mean, µ,
by more than cσ, i.e. Pr{|X − µ| > cσ}?
Solution:
Some numerical values
c 2Q(c)
0.5 0.617
1 0.317
2 4.55× 10−2
3 2.70× 10−3
4 6.33× 10−5
SM 29

EECE 359 - Signals and Communications: Part 3 Spring 2014
From the table, we can say that in a
population of Gaussian distributed values,
about 95.5% of the values will be within two
standard deviations of the mean value.
The Q(.) function arises frequently in error
analyses when an additive white Gaussian
noise (AWGN) channel is assumed.
Suppose that the received signal in a certain
binary communication system is
r = s+ n (35)
where the transmitted signal, s, takes on
value +1 or −1 with equal probability of 12
and n is a sample value drawn from a Gaussian
distribution with zero mean and variance σ2.
We can view s as being sent over an additive
Gaussian noise channel.
Then, the conditional probability of error,
SM 30

EECE 359 - Signals and Communications: Part 3 Spring 2014
given either +1 or −1 is sent, can be easily
obtained in terms of the Q(.) function.
Here is how
What should the decision threshold, T , be set
to?
If T is set to 0, then by symmetry, the
probability of error, Pe, is the same whether
+1 or −1 is sent. Assuming −1 is sent, we
have
Pe|s=−1 = Pr{R > 0}
= Q
(
0− (−1)
σ
)
= Q
(
1
σ
)
. (36)
SM 31

EECE 359 - Signals and Communications: Part 3 Spring 2014
Averages and moments
We are often interested in evaluating the
average value of a rv X or some function
of the rv.
Defn: Suppose that Y = h(X). The
expected value, expectation or ensemble
average of Y is
E[Y ] = Y =
∫ ∞
−∞h(x)fX(x)dx (37)
For a discrete rv X, from (37), the expected
value can be evaluated as
E[Y ] = Y =M∑
i=1
h(xi)p(xi) (38)
where M is the number of possible values of
X.
Remark: The expectation operator is linear,
SM 32

EECE 359 - Signals and Communications: Part 3 Spring 2014
i.e.
E[ah1(X) + bh2(X)] = aE[h1(X)] + bE[h2(X)] (39)
Notation: The expected value, E[X], of a rv
X is commonly called its mean and denoted
by mX. It gives the “center of mass” of the
distribution.
Exercise: Determine the expected value of
the uniform distribution in (24).
Solution: From (37), we have
E[X] = X =
∫ b
a
x1
b− adx
=1
b− a
[
x2
2
]b
a
=a+ b
2
Exercise: Show that
SM 33

EECE 359 - Signals and Communications: Part 3 Spring 2014
1. the mean of the exponential distribution in
(25) is 1λ
2. the mean of the Gaussian distribution in
(28) is µ
3. the mean of the Binomial distribution in
(19) is nε
4. the mean of the Poisson distribution in (22)
is λ
5. the mean of the geometric distribution in
(23) is 1p
Other common measures of a distribution:
• the median is the value, x, of X at which
P (X > x) = P (X < x) (40)
SM 34

EECE 359 - Signals and Communications: Part 3 Spring 2014
• the mode is the value, x, of X at which
fX(x) is maximum.
Moments
Moments are defined as the expected values
of specific functions of X.
Defn: The rth moment of X, denoted by µr,
is
E[Xr]∆=
∫ ∞
−∞xrfX(x) dx (41)
Remark: µ1 is the mean value and µ2 is the
mean square value of X.
Defn: The rth central moment ofX, denotedby µ′
r, is
E[(X −mX)r]∆=
∫ ∞
−∞(x−mX)rfX(x) dx (42)
Remark: The second central moment, µ′2,
is called the variance of X, and is denoted
SM 35

EECE 359 - Signals and Communications: Part 3 Spring 2014
by σ2X; σX is termed the standard deviation
and is commonly used as a measure of the
dispersion of X.
Fact:
σ2X = E[X2]−m2
X (43)
Proof:
Exercise: Determine the variance of the
uniform distribution in (24).
SM 36

EECE 359 - Signals and Communications: Part 3 Spring 2014
Solution: From (41), we have
E[X2] =
∫ b
a
x2 1
b− adx
=1
b− a
[
x3
3
]b
a
=a2 + ab+ b2
3
Using (43), we have
var(X) = σ2X = E[X2]− (E[X])2
=a2 + ab+ b2
3−
(
a+ b
2
)2
=(b− a)2
12
Exercise: Show that
1. the variance of the exponential distribution
SM 37

EECE 359 - Signals and Communications: Part 3 Spring 2014
in (25) is 1λ2
2. the variance of the Gaussian distribution in
(28) is σ2
3. the variance of the Binomial distribution in
(19) is nε(1− ε)
4. the variance of the Poisson distribution in
(22) is λ
5. the variance of the geometric distribution
in (23) is 1−pp2
SM 38

EECE 359 - Signals and Communications: Part 3 Spring 2014
Generating samples of a random variable
with an arbitrary probability distribution
Random number generators (RNGs) are
commonly used in computer simulations to
assess the performance of communication
systems. For example, MATLAB provides
rand (randn) for generating samples drawn
from U(0, 1) (N (0, 1)) distributions. (See
below)
>> help randRAND Uniformly distributed pseudorandom numbers.R = RAND(N) returns an N-by-N matrix containingpseudorandom values drawn from the standard uniformdistribution on the open interval(0,1).
>> help randnRANDN Normally distributed pseudorandom numbers.R = RANDN(N) returns an N-by-N matrix containingpseudorandom values drawn from the standard normaldistribution.
How can we generate samples, x1, x2, x3, . . .,
from an arbitrary distribution with CDF
SM 39

EECE 359 - Signals and Communications: Part 3 Spring 2014
FX(x)?
�� = ����(��)
��
0
��(�)
�
1
Step 1: Generate independent samples of
U(0, 1); call them ui, i = 1, 2, . . .
Step 2: Let xi = F−1X (ui), as shown in the
above figure. Then, the values xi, i = 1, 2, . . .
are drawn from the desired distribution.
Why?
We can check the distribution from which the
SM 40
EECE 359 - Signals and Communications: Part 3 Spring 2014
values xi, i = 1, 2, . . . are drawn as follows.
FXi(x)
∆= P (Xi ≤ x)
= P (F−1X (Ui) ≤ x)
= P (Ui ≤ FX(x))
= FX(x) (44)
Equation (44) shows that the samples,
x1, x2, x3, . . ., are drawn from a distribution
with CDF FX(x), as desired.
Example: Generate samples from the
exponential distribution with CDF
FX(x) =
{
1− e−x, 0 ≤ x < ∞0, x < 0.
(45)
Solution: In this case,
u = FX(x) = 1− e−x. (46)
SM 41
EECE 359 - Signals and Communications: Part 3 Spring 2014
Hence,
x = − ln(1− u). (47)
So, we first generate U(0, 1) samples
{ui, i = 1, 2, . . .}.
Then, the values {xi = − ln(1− ui), i = 1, 2, . . .}are samples from the desired exponential
distribution.
SM 42

EECE 359 - Signals and Communications: Part 3 Spring 2014
Functional transformation of random
variables
� � = �(�)
�(�)
In the above figure, assume that the output
y = g(x) at any time instant depends only
on the input x at that time instant, i.e. the
system is memoryless.
Then, the pdf, fY (y), of the output, Y , can
be written in terms of the pdf, fX(x), of the
input, X as follows:
Theorem (Couch, p. 704)
fY (y) =M∑
i=1
fX(x)
|dy/dx|
∣
∣
∣
∣
x=xi
(48)
where x1, x2, . . . , xM are the M values of x
for which g(x) = y, |.| denotes the absolute
SM 43

EECE 359 - Signals and Communications: Part 3 Spring 2014
value and the last vertical line denotes the
evaluation at x = xi.
Example: Rayleigh fading is commonly used
to model the amplitude of a signal transmitted
over a wireless communication channel. The
pdf of the channel amplitude gain follows a
Rayleigh distribution, i.e.
fA(a) =
{
2ab e−a2/b, a ≥ 0
0, a < 0.(49)
The channel power gain, Γ, is the square of
the channel amplitude gain, A. We wish to
determine the pdf, fΓ(γ), of Γ.
Using (48), with y = γ, x = a, and dγda = 2a,
we have
fΓ(γ) =fA(a)
2a
∣
∣
∣
∣
a=+√γ
+fA(a)
2a
∣
∣
∣
∣
a=−√γ
(50)
Note that the second term on the RHS of
SM 44

EECE 359 - Signals and Communications: Part 3 Spring 2014
(50) is 0, since fA(a) = 0, a < 0. Therefore,
fΓ(γ) =
{
1b e−γ/b, γ ≥ 0
0, γ < 0.(51)
Equation (51) is the exponential pdf with
mean b. We conclude that the pdf of
the square of a Rayleigh distributed rv is
exponential.
The two pdfs are plotted in the figure below,
with b = 4/π which corresponds to a unity
mean for the Rayleigh distribution.
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Rayleigh and Exponential pdfs for b=4/pi
x
f(x)
Rayleigh Exponential
SM 45

EECE 359 - Signals and Communications: Part 3 Spring 2014
Multivariate statistics
So far, we have looked at pdfs and CDFs of
one rv. These can be extended to the case of
N > 1 rv’s. For simplicity, we focus on the
N = 2, i.e. bivariate case.
Defn: The 2-dimensional cumulative
distribution function (CDF) of the rv’s X
and Y is
FX,Y (x, y) = P (X ≤ x and Y ≤ y) (52)
Defn: The 2-dimensional probability density
function (pdf) of the rv’s X and Y is
fX,Y (x0, y0) =∂2FX,Y (x, y)
∂x∂y
∣
∣
∣
∣
(x,y)=(x0,y0)
(53)
Properties of 2-D CDFs
• FX,Y (x, y) is a non-decreasing function of
x and y.
SM 46
EECE 359 - Signals and Communications: Part 3 Spring 2014
• FX,Y (−∞,−∞) = 0
• FX,Y (∞,∞) = 1
Note that FX,Y (x,∞) = FX(x).
Properties of 2-D pdf’s
• f(x, y) is a non-negative function, i.e.
f(x, y) ≥ 0.
•∫ ∞
−∞
∫ ∞
−∞f(x, y)dxdy = 1. (54)
• f(x, y) = f(x)f(y|x).
Defn: The expected value of g(X,Y ) is
E[g(X,Y )] =
∫ ∞
−∞
∫ ∞
−∞g(x, y)fX,Y (x, y)dxdy (55)
SM 47

EECE 359 - Signals and Communications: Part 3 Spring 2014
Defn: Two rv’s X and Y are independent if
fX,Y (x, y) = fX(x)fY (y). (56)
Defn: The correlation of X and Y is
E[XY ] =
∫ ∞
−∞
∫ ∞
−∞xyfX,Y (x, y)dxdy. (57)
Defn: Two rv’s X and Y are uncorrelated if
E[XY ] = E[X]E[Y ]. (58)
Defn: The covariance of X and Y is
Cov(X,Y ) = E[(X − mX)(Y − mY )] (59)
=
∫ ∞
−∞
∫ ∞
−∞(x − mX)(y − mY )fX,Y (x, y)dxdy. (60)
Exercise: Show that
• Cov(X, Y ) = E[XY ]− E[X ]E[Y ]
SM 48

EECE 359 - Signals and Communications: Part 3 Spring 2014
• Var(X + Y ) = Var(X) + Var(Y ) + 2 Cov(X, Y )
Defn: The correlation coefficient (also called
the normalized covariance) of X and Y is
ρ =Cov(X,Y )
σXσY. (61)
Facts:
• −1 ≤ ρ ≤ +1.
• If X and Y are independent, then they
are also uncorrelated. The converse is not
generally true. However, the converse is
true for bivariate Gaussian rv’s (See Couch,
p. 712, for the pdf).
• If X and Y are independent, then their
covariance is zero. The converse is not
generally true. However, the converse is
true for jointly Gaussian rv’s.
SM 49

EECE 359 - Signals and Communications: Part 3 Spring 2014
• The pdf of the sum of independent rv’s is
given by the convolution of the individual
pdf’s.
Exercise: Determine the pdf of the sum of
two independent U(0, 1) rv’s.
• Central Limit Theorem (CLT) The CDF of
a sum of N independent rv’s approaches a
Gaussian CDF as N increases.
• Chebyshev’s Inequality If X is a rv with
finite mean µ and variance σ2, then for any
k > 0,
P (|X − µ| ≥ kσ) ≤ 1
k2(62)
Exercise: Let Xn be the number of headsin n tosses of a fair coin and Yn = Xn/n.Show that
P (|Yn − 0.5| ≥ ε) ≤ 1
4nε2(63)
SM 50


















