Introduction Psycho-Acoustics Definition Psycho-acoustics is ...

arX
iv:0
807.
3790
v1 [
nlin
.AO
] 2
4 Ju
l 200
8
Nonlinear Quantum Neuro–Psycho–Dynamics
with Topological Phase Transitions
Vladimir G. Ivancevic∗ Tijana T. Ivancevic†
Abstract
We have proposed a novel model of general quantum, stochastic and chaotic psychody-namics. The model is based on the previously developed Life–Space Foam (LSF) frameworkto motivational and cognitive dynamics. The present model extends the LSF–approachby incorporating chaotic and topological non-equilibrium phase transitions. Such extendedLSF–model is applied for rigorous description of multi–agent joint action. The present modelis related to Haken–Kelso–Bunz model of self-organization in the human motor system (in-cluding: multi-stability, phase transitions and hysteresis effects, presenting a contrary viewto the purely feedback driven neural systems), as well as the entropy–approach to adaptationin human goal–directed motor control.
Keywords: Quantum probability, Life–Space Foam, noisy decision making, chaos, topolog-ical phase transitions, multi–agent joint action, goal–directed motor control
∗Human Systems Integration, Land Operations Division, Defence Science & Technology Organisation, P.O.Box 1500, Edinburgh SA 5111, Australia ([email protected])
†School of Electrical and Information Engineering, University of South Australia, Mawson Lakes, S.A. 5095,Australia ([email protected])
1

1 Introduction
Classical physics has provided a strong founda-tion for understanding brain function throughmeasuring brain activity, modelling the func-tional connectivity of networks of neurons withalgebraic matrices, and modelling the dynamicsof neurons and neural populations with sets ofcoupled differential equations (Freeman, 1975,2000). Various tools from classical physics en-abled recognition and documentation of aspectsof the physical states of the brain; the struc-tures and dynamics of neurons, the operationsof membranes and organelles that generate andchannel electric currents; and the molecular andionic carriers that implement the neural ma-chineries of electrogenesis and learning. Theysupport description of brain functions at sev-eral levels of complexity through measuring neu-ral activity in the brains of animal and humansubjects engaged in behavioral exchanges withtheir environments. One of the key propertiesof brain dynamics are the coordinated oscil-lations of populations of neurons that changerapidly in concert with changes in the environ-ment (Freeman and Vitiello, 2006; Ivancevic,2006a, 2007b). Also, most experimental neuro-biologists and neural theorists have focused onsensorimotor functions and their adaptationsthrough various forms of learning and memory.Reliance has been placed on measurements ofthe rates and intervals of trains of action poten-tials of small numbers of neurons that are tunedto perceptual invariances and modelling neu-ral interactions with discrete networks of simu-lated neurons. These and related studies havegiven a vivid picture of the cortex as a mosaicof modules, each of which performs a sensoryor motor function; they have not given a pic-ture of comparable clarity of the integration of
modules.According to Freeman and Vitiello (2006),
many–body quantum field theory appears to bethe only existing theoretical tool capable to ex-plain the dynamic origin of long–range correla-tions, their rapid and efficient formation anddissolution, their interim stability in groundstates, the multiplicity of coexisting and pos-sibly noninterfering ground states, their degreeof ordering, and their rich textures relating tosensory and motor facets of behaviors. It is his-torical fact that many–body quantum field the-ory has been devised and constructed in pastdecades exactly to understand features like or-dered pattern formation and phase transitionsin condensed matter physics that could not beunderstood in classical physics, similar to thosein the brain.
The domain of validity of the ‘quantum’ isnot restricted to the microscopic world (Umeza-va, 1993). There are macroscopic features ofclassically behaving systems, which cannot beexplained without recourse to the quantum dy-namics. This field theoretic model leads to theview of the phase transition as a condensationthat is comparable to the formation of fog andrain drops from water vapor, and that mightserve to model both the gamma and beta phasetransitions. According to such a model, theproduction of activity with long–range correla-tion in the brain takes place through the mech-anism of spontaneous breakdown of symmetry(SBS), which has for decades been shown to de-scribe long-range correlation in condensed mat-ter physics. The adoption of such a field theo-retic approach enables modelling of the wholecerebral hemisphere and its hierarchy of com-ponents down to the atomic level as a fully in-tegrated macroscopic quantum system, namelyas a macroscopic system which is a quantum
2

system not in the trivial sense that it is made,like all existing matter, by quantum compo-nents such as atoms and molecules, but in thesense that some of its macroscopic propertiescan best be described with recourse to quan-tum dynamics (see Freeman and Vitiello, 2006and references therein).
It is well–known that non-equilibrium phasetransitions (Haken, 1983, 1993, 1996) are phe-nomena which bring about qualitative physicalchanges at the macroscopic level in presenceof the same microscopic forces acting amongthe constituents of a system. Phase transi-tions can also be associated with autonomousrobot competence levels, as informal specifica-tions of desired classes of behaviors for robotsover all environments they will encounter, asdescribed by Brooks’ subsumption architectureapproach (Brooks, 1986, 1989, 1990). The dis-tributed network of augmented finite–state ma-chines can exist in different phases or modal-ities of their state–space variables, which de-termine the systems intrinsic behavior. Thephase transition represented by this approachis triggered by either internal (a set–point) orexternal (a command) control stimuli, such asa command to transition from a sleep mode toawake mode, or walking to running.
On the other hand, it is well–known thathumans possess more degrees of freedom thanare needed to perform any defined motor task,but are required to co-ordinate them in order toreliably accomplish high-level goals, while facedwith intense motor variability. In an attemptto explain how this takes place, Todorov andJordan (2002) formulated an alternative the-ory of human motor coordination based on theconcept of stochastic optimal feedback control.They were able to conciliate the requirementof goal achievement (e.g., grasping an object)
with that of motor variability (biomechanicaldegrees of freedom). Moreover, their theoryaccommodates the idea that the human mo-tor control mechanism uses internal ‘functionalsynergies’ to regulate task–irrelevant (redun-dant) movement.
Until recently, research concerning sensoryprocessing and research concerning motor con-trol have followed parallel but independent paths.The partitioning of the two lines of research inpractice partly derived from and partly fostereda bipartite view of sensorimotor processing inthe brain – that a sensory/perceptual systemcreates a general purpose representation of theworld which serves as the input to the motorsystems (and other cognitive systems) that gen-erate action/behavior as an output. Recent re-sults from research on vision in natural taskshave seriously challenged this view, suggest-ing that the visual system does not generatea general–purpose representation of the world,but rather extracts information relevant to thetask at hand (Droll et al, 2005; Land and Hay-hoe, 2001). At the same time, researchers inmotor control have developed an increasing un-derstanding of how sensory limitations and sen-sory uncertainty can shape the motor strategiesthat humans employ to perform tasks. More-over, many aspects of the problem of sensori-motor control are specific to the mapping fromsensory signals to motor outputs and do notexist in either domain in isolation. Sensoryfeedback control of hand movements, coordi-nate transformations of spatial representationsand the influence of processing speed and atten-tion on sensory contributions to motor controlare just a few of these. In short, to under-stand how human (and animal) actors use sen-sory information to guide motor behavior, wemust study sensory and motor systems as an
3

integrated whole rather than as decomposablemodules in a sequence of discrete processingsteps (Knill et al, 2007).
Cognitive neuroscience investigations, inclu-ding fMRI studies of human co–action, sug-gest that cognitive and neural processes sup-porting co–action include joint attention, ac-tion observation, task sharing, and action co-ordination (Fogassi et al, 2005; Knoblich andJordan, 2003; Newman et al, 2007; Sebanz atal, 2006). For example, when two actors aregiven a joint control task (e.g., tracking a mov-ing target on screen) and potentially conflictingcontrols (e.g., one person in charge of accelera-tion, the other – deceleration), their joint per-formance depends on how well they can antici-pate each other’s actions. In particular, bettercoordination is achieved when individuals re-ceive real–time feedback about the timing ofeach other’s actions (Sebanz at al, 2006).
A developing field in coordination dynam-ics involves the theory of social coordination,which attempts to relate the DC to normal hu-man development of complex social cues follow-ing certain patterns of interaction. This work isaimed at understanding how human social in-teraction is mediated by meta-stability of neu-ral networks. fMRI and EEG are particularlyuseful in mapping thalamocortical response tosocial cues in experimental studies. In partic-ular, a new theory called the Phi complex hasbeen developed by S. Kelso and collaborators,to provide experimental results for the theoryof social coordination dynamics (see the recentnonlinear dynamics paper discussing social co-ordination and EEG dynamics of Tognoli et al,2007). According to this theory, a pair of phirhythms, likely generated in the mirror neuronsystem, is the hallmark of human social coor-dination. Using a dual-EEG recording system,
the authors monitored the interactions of eightpairs of subjects as they moved their fingerswith and without a view of the other individ-ual in the pair.
Recently developed Life Space Foam (LSF)model (Ivancevic and Aidman, 2007) is an inte-gration of two modern approaches to cognition:(i) dynamical field theory (DFT, Amari, 1977;Schoner, 2007) and (ii) quantum–probabilisticdynamics (QP, Glimcher, 2005; Busemayer etal, 2006). In this paper we expand the LSF–concept to model decision making process inhuman–robot joint action and related LSF–phasetransitions.
2 Classical versus Quantum
Probability
As quantum probability in human cognition anddecision making has recently become popular,let us briefly describe this fundamental concept(for more details, see Ivancevic, 2007a, 2007c,2008b).
2.1 Classical Probability and
Stochastic Dynamics
Recall that a random variable X is defined byits distribution function f(x). Its probabilistic
description is based on the following rules: (i)P (X = xi) is the probability that X = xi;and (ii) P (a ≤ X ≤ b) is the probability thatX lies in a closed interval [a, b]. Its statisticaldescription is based on: (i) µX or E(X) is themean or expectation of X; and (ii) σX is thestandard deviation of X. There are two casesof random variables: discrete and continuous,each having its own probability (and statistics)theory.
4

A discrete random variable X has only acountable number of values {xi}. Its distribu-tion function f(xi) has the following properties:
P (X = xi) = f(xi), f(xi) ≥ 0,∑
i
f(xi) dx = 1.
Statistical description of X is based on itsdiscrete mean value µX and standard deviationσX , given respectively by
µX = E(X) =∑
i
xif(xi),
σX =√
E(X2)− µ2X .
Here f(x) is a piecewise continuous functionsuch that:
P (a ≤ X ≤ b) =
∫ b
af(x) dx, f(x) ≥ 0,
∫ ∞
−∞
f(x) dx =
∫
R
f(x) dx = 1.
Statistical description of X is based on itscontinuous mean µX and standard deviationσX , given respectively by
µX = E(X) =
∫ ∞
−∞
xf(x) dx,
σX =√
E(X2)− µ2X .
Now, let us observe the similarity betweenthe two descriptions. The same kind of similar-ity between discrete and continuous quantumspectrum stroke P. Dirac when he suggested thecombined integral approach, that he denoted
by
∫
Σ – meaning ‘both integral and sum atonce’: summing over a discrete spectrum andintegration over a continuous spectrum.
To emphasize this similarity even further,as well as to set–up the stage for the path inte-gral, recall the notion of a cumulative distribu-
tion function of a random variable X, that is afunction F : R −→ R, defined by
F (a) = P (X) ≤ a.
In particular, suppose that f(x) is the distri-bution function of X. Then
F (x) =∑
xi≤x
f(xi), or
F (x) =
∫ ∞
−∞
f(t) dt,
according to as x is a discrete or continuousrandom variable. In either case, F (a) ≤ F (b)whenever a ≤ b. Also,
limx−→−∞
F (x) = 0 and limx−→∞
F (x) = 1,
that is, F (x) is monotonic and its limit to theleft is 0 and the limit to the right is 1. Further-more, its cumulative probability is given by
P (a ≤ X ≤ b) = F (b)− F (a),
and the Fundamental Theorem of Calculus tellsus that, in the continuum case,
f(x) = ∂xF (x).
Now, recall that Markov stochastic process
is a random process characterized by a lack of
memory, i.e., the statistical properties of theimmediate future are uniquely determined bythe present, regardless of the past (Gardiner,1985; Ivancevic, 2006b).
For example, a random walk is an exam-ple of the Markov chain, i.e., a discrete–timeMarkov process, such that the motion of the
5

system in consideration is viewed as a sequenceof states, in which the transition from one stateto another depends only on the preceding one,or the probability of the system being in statek depends only on the previous state k − 1.The property of a Markov chain of prime im-portance in biomechanics is the existence of aninvariant distribution of states: we start withan initial state x0 whose absolute probability is1. Ultimately the states should be distributedaccording to a specified distribution.
Between the pure deterministic dynamics,in which all DOF of the system in considera-tion are explicitly taken into account, leadingto classical dynamical equations, for examplein Hamiltonian form (using ∂x ≡ ∂/∂x),
qi = ∂piH, pi = −∂qiH, (1)
(where qi, pi are coordinates and momenta, whileH = H(q, p) is the total system energy) – andpure stochastic dynamics (Markov process), thereis so–called hybrid dynamics, particularly Brow-nian dynamics, in which some of DOF are rep-resented only through their stochastic influence
on others. As an example, suppose a systemof particles interacts with a viscous medium.Instead of specifying a detailed interaction ofeach particle with the particles of the viscousmedium, we represent the medium as a stochas-tic force acting on the particle. The stochasticforce reduces the dimensionally of the dynam-ics.
Recall that the Brownian dynamics repre-sents the phase–space trajectories of a collec-tion of particles that individually obey Langevinrate equations in the field of force (i.e., the par-ticles interact with each other via some deter-ministic force). For a free particle, the Langevin
equation reads (Gardiner, 1985):
mv = R(t) − βv,
where m denotes the mass of the particle andv its velocity. The right–hand side representthe coupling to a heat bath; the effect of therandom force R(t) is to heat the particle. Tobalance overheating (on the average), the par-ticle is subjected to friction β. In humanoiddynamics this is performed with the Rayleigh–Van der Pol’s dissipation. Formally, the solu-tion to the Langevin equation can be writtenas
v(t) = v(0) exp
(
− β
mt
)
+1
m
∫ t
0exp[−(t− τ)β/m]R(τ ) dτ ,
where the integral on the right–hand side isa stochastic integral and the solution v(t) is arandom variable. The stochastic properties ofthe solution depend significantly on the stochas-tic properties of the random force R(t). In theBrownian dynamics the random force R(t) isGaussian distributed. Then the problem boilsdown to finding the solution to the Langevinstochastic differential equation with the supple-mentary condition (zero and mean variance)
< R(t) >= 0, < R(t)R(0) >= 2βkBTδ(t),
where < . > denotes the mean value, T is tem-perature, kB−equipartition (i.e., uniform dis-tribution of energy) coefficient, Dirac δ(t)−func-tion.
Algorithm for computer simulation of theBrownian dynamics (for a single particle) canbe written as (Heermann, 1990):
1. Assign an initial position and velocity.
6

2. Draw a random number from a Gaussiandistribution with mean zero and variance.
3. Integrate the velocity to get vn+1.
4. Add the random component to the veloc-ity.
Another approach to taking account the cou-pling of the system to a heat bath is to subjectthe particles to collisions with virtual particles
(Heermann, 1990). Such collisions are imag-ined to affect only momenta of the particles,hence they affect the kinetic energy and in-troduce fluctuations in the total energy. Eachstochastic collision is assumed to be an instan-taneous event affecting only one particle.
The collision–coupling idea is incorporatedinto the Hamiltonian model of dynamics (1) byadding a stochastic force Ri = Ri(t) to the pequation
qi = ∂piH, pi = −∂qiH +Ri(t).
On the other hand, the so–called Ito stochas-
tic integral represents a kind of classical Riemann–Stieltjes integral from linear functional analy-sis, which is (in 1D case) for an arbitrary time–function G(t) defined as the mean square limit
∫ t
t0
G(t)dW (t) =
ms limn→∞
{n∑
i=1
G(ti−1[W (ti)−W (ti−1]}.
Now, the general ND Markov process canbe defined by Ito stochastic differential equa-tion (SDE),
dxi(t) = Ai[xi(t), t]dt+Bij [x
i(t), t] dW j(t),
xi(0) = xi0, (i, j = 1, . . . , N)
or corresponding Ito stochastic integral equa-
tion
xi(t) = xi(0) +
∫ t
0dsAi[x
i(s), s]
+
∫ t
0dW j(s)Bij [x
i(s), s],
in which xi(t) is the variable of interest, thevector Ai[x(t), t] denotes deterministic drift, thematrix Bij[x(t), t] represents continuous stochas-tic diffusion fluctuations, and W j(t) is an N−variableWiener process (i.e., generalized Brow-nian motion, see Wiener, 1961) and
dW j(t) = W j(t+ dt)−W j(t).
Now, there are three well–known special casesof the Chapman–Kolmogorov equation (see Gar-diner, 1985):
1. When both Bij[x(t), t] andW (t) are zero,i.e., in the case of pure deterministic mo-tion, it reduces to the Liouville equation
∂tP (x′, t′|x′′, t′′) =
−∑
i
∂
∂xi{
Ai[x(t), t]P (x′, t′|x′′, t′′)}
.
2. When only W (t) is zero, it reduces to theFokker–Planck equation
∂tP (x′, t′|x′′, t′′) =
−∑
i
∂
∂xi{
Ai[x(t), t]P (x′, t′|x′′, t′′)}
+
1
2
∑
ij
∂2
∂xi∂xj{
Bij[x(t), t]P (x′, t′|x′′, t′′)}
.
3. When both Ai[x(t), t] and Bij [x(t), t] arezero, i.e., the state–space consists of inte-
7

gers only, it reduces to the Master equa-
tion of discontinuous jumps
∂tP (x′, t′|x′′, t′′) =∫
dxW (x′|x′′, t)P (x′, t′|x′′, t′′)
−∫
dxW (x′′|x′, t)P (x′, t′|x′′, t′′).
The Markov assumption can now be formu-lated in terms of the conditional probabilitiesP (xi, ti): if the times ti increase from right toleft, the conditional probability is determinedentirely by the knowledge of the most recentcondition. Markov process is generated by a setof conditional probabilities whose probability–density P = P (x′, t′|x′′, t′′) evolution obeys thegeneral Chapman–Kolmogorov integro–differen-
tial equation
∂tP = −∑
i
∂
∂xi{Ai[x(t), t]P}
+1
2
∑
ij
∂2
∂xi∂xj{Bij [x(t), t]P}
+
∫
dx{
W (x′|x′′, t)P −W (x′′|x′, t)P}
including deterministic drift, diffusion fluctua-
tions and discontinuous jumps (given respec-tively in the first, second and third terms onthe r.h.s.).
It is this general Chapman–Kolmogorov inte-gro–differential equation, with its conditionalprobability density evolution, P = P (x′, t′|x′′, t′′),that we are going to model by the Feynman
path integral
∫
Σ , providing us with the phys-ical insight behind the abstract (conditional)probability densities.
2.2 Quantum Probability Concept
An alternative concept of probability, the so–called quantum probability, is based on the fol-lowing physical facts (elaborated in detail inthis section):
1. The time–dependent Schrodinger equation
represents a complex–valued generalization
of the real–valued Fokker–Planck equa-
tion for describing the spatio–temporalprobability density function for the sys-tem exhibiting continuous–time Markov
stochastic process.
2. The Feynman path integral
∫
Σ is a gen-eralization of the time–dependent Schro-dinger equation, including both continuous–time and discrete–time Markov stochasticprocesses.
3. Both Schrodinger equation and path in-tegral give ‘physical description’ of anysystem they are modelling in terms of itsphysical energy, instead of an abstractprobabilistic description of the Fokker–Planck equation.
Therefore, the Feynman path integral
∫
Σ , asa generalization of the time–dependent Schro-dinger equation, gives a unique physical de-scription for the general Markov stochastic pro-cess, in terms of the physically based general-ized probability density functions, valid bothfor continuous–time and discrete–time Markovsystems.
Basic consequence: a different way for cal-
culating probabilities. The difference is rootedin the fact that sum of squares is different from
the square of sums, as is explained in the fol-lowing text.
8

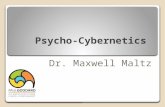
In Dirac–Feynman quantum formalism, eachpossible route from the initial system state Ato the final system state B is called a history.This history comprises any kind of a route (seeFigure 1), ranging from continuous and smoothdeterministic (mechanical–like) paths to com-pletely discontinues and randomMarkov chains(see e.g., Gardiner, 1985). Each history (la-belled by index k) is quantitatively describedby a complex number, zk = rke
iθk (with i =√−1), called the ‘individual transition ampli-
tude’. Its absolute square, |zk|2, is called theindividual transition probability. Now, the to-
tal transition amplitude is the sum of all indi-vidual transition amplitudes,
∑
k zk, called thesum–over–histo-ries. The absolute square ofthis sum–over–histories, |∑k zk|2, is the total
transition probability.In this way, the overall probability of the
system’s transition from some initial state Ato some final state B is given not by adding upthe probabilities for each history–route, but by‘head–to–tail’ adding up the sequence of am-plitudes making–up each route first (i.e., per-forming the sum–over–histories) – to get the to-tal amplitude as a ‘resultant vector’, and thensquaring the total amplitude to get the overalltransition probability.
3 The Life Space Foam
General nonlinear attractor dynamics, both de-terministic and stochastic, as well as possiblychaotic, developed in the framework of Feyn-man path integrals, have recently been appliedby Ivancevic and Aidman (2007) to formalizeclassical Lewinian field–theoretic psychodynam-ics (Lewin, 1951, 1997; Gold, 1999), resulting inthe development of a new concept of life–space
Figure 1: Two ways of physical transition from an
initial state A to the corresponding final state B.
(a) Classical physics proposes a single determinis-
tic trajectory, minimizing the total system’s energy.
(b) Quantum physics proposes a family of Markov
stochastic histories, namely all possible routes from
A to B, both continuous–time and discrete–time
Markov chains, each giving an equal contribution
to the total transition probability.
foam (LSF) as a natural medium for motiva-tional and cognitive psychodynamics. Accord-ing to the LSF–formalism, the classic Lewinianlife space can be macroscopically represented asa smooth manifold with steady force–fields andbehavioral paths, while at the microscopic levelit is more realistically represented as a collec-tion of wildly fluctuating force–fields, (loco)mo-tion paths and local geometries (and topologieswith holes).
We have used the new LSF concept to de-velop modelling framework for motivational dy-namics (MD) and induced cognitive dynamics(CD). Motivation processes both precede andcoincide with every goal–directed action. Usu-ally these motivation processes include the se-quence of the following four feedforward phases
(Ivancevic and Aidman, 2007): (*)
9

1. Intention Formation F , including: deci-sion making, commitment building, etc.
2. Action Initiation I, including: handlingconflict of motives, resistance to alterna-tives, etc.
3. Maintaining the Action M, including: re-sistance to fatigue, distractions, etc.
4. Termination T , including parking andavoiding addiction, i.e., staying in con-trol.
With each of the phases {F ,I,M,T } in (*), wecan associate a transition propagator – an en-semble of (possibly crossing) feedforward pathspropagating through the ‘wood of obstacles’(including topological holes in the LSF, see Fig-ure 3), so that the complete transition is aproduct of propagators (as well as sum overpaths). All the phases–propagators are con-trolled by a unique Monitor feedback process.
A set of least–action principles is used tomodel the smoothness of global, macro–levelLSF paths, fields and geometry, according tothe following prescription. The action S[Φ],psycho–physical dimensions of
Energy × T ime = Effort
and depending on macroscopic paths, fieldsand geometries (commonly denoted by an ab-stract field symbol Φi) is defined as a temporalintegral from the initial time instant tini to thefinal time instant tfin,
S[Φ] =
∫ tfin
tini
L[Φ] dt, (2)
with Lagrangian density given by
L[Φ] =
∫
dnxL(Φi, ∂xjΦi),
where the integral is taken over all n coordi-nates xj = xj(t) of the LSF, and ∂xjΦi are timeand space partial derivatives of the Φi−variablesover coordinates. The standard least actionprinciple
δS[Φ] = 0, (3)
gives, in the form of the so–called Euler–Lagran-gian equations, a shortest (loco)motion path,an extreme force–field, and a life–space geom-etry of minimal curvature (and without holes).In this way, we effectively derive a unique glob-ally smooth transition map
F : INTENTIONtini✲ ACTIONtfin ,
(4)performed at a macroscopic (global) time–levelfrom some initial time tini to the final timetfin. In this way, we have obtained macro–objects in the global LSF: a single path de-scribed by Newtonian–like equation of motion,a single force–field described by Maxwellian–like field equations, and a single obstacle–freeRiemannian geometry (with global topologywithout holes).
To model the corresponding local, micro–level LSF structures of rapidly fluctuating cog-nitive dynamics, an adaptive path integral isformulated, defining a multi–phase and multi–path (multi–field and multi–geometry) transi-tion amplitude from the state of Intention tothe state of Action,
〈Action|Intention〉total :=∫
Σ D[wΦ] eiS[Φ],(5)
where the Lebesgue integration is performedover all continuous Φi
con = paths + fields +geometries, while summation is performed overall discrete processes and regional topologiesΦjdis. The symbolic differential D[wΦ] in the
10

general path integral (5), represents an adap-tive path measure, defined as a weighted prod-uct (with i = 1, ..., n = con+ dis)
D[wΦ] = limN−→∞
N∏
s=1
wsdΦis. (6)
The adaptive path integral (5)–(6) representsan∞−dimensional neural network, with weightsw updating by the general rule (Ivancevic andAidman, 2007):
new value(t+1) = old value(t)+ innovation(t).
The adaptive path integral (5) incorporatesthe local Bernstein adaptation process (Bern-stein, 1967, 1982):
desired state SW (t+ 1) =
current state IW (t) + adjustment step ∆W (t)
as well as the augmented finite state machineof Brooks’ subsumption architecture (Brooks,1986, 1989, 1990), with a networked behaviorfunction:
final state w(t+ 1) =
current state w(t) +
adjustment behavior f(∆w(t)).
We remark here that the traditional neuralnetworks approaches are known for their classesof functions they can represent. This limitationhas been attributed to their low-dimensionality(the largest neural networks are limited to theorder of 105 dimensions, see Izhikevich and Edel-man, 2008). The proposed path integral ap-proach represents a new family of function-re-presentation methods, which potentially offersa basis for a fundamentally more expansive so-lution.
On the macro–level in LSF we have the(loco)motion action principle
δS[x] = 0,
with the Newtonian–like action S[x] given by
S[x] =
∫ tfin
tini
dt [1
2gij x
ixj + ϕi(xi)], (7)
where xi represents motivational (loco)motionvelocity vector with cognitive processing speed.The first bracket term in (7) represents the ki-netic energy T ,
T =1
2gij x
ixj ,
generated by theRiemannian metric tensor gij ,while the second bracket term, ϕi(xi), denotesthe family of potential force–fields, driving the(loco)motions xi = xi(t) (the strengths of thefields ϕi(xi) depend on their positions xi inLSF. The corresponding Euler–Lagrangian equa-tion gives the Newtonian–like equation of mo-tion
d
dtTxi − Txi = −ϕi
xi , (8)
(subscripts denote the partial derivatives), whichcan be put into the standard Lagrangian form
d
dtLxi = Lxi , with L = T − ϕi(xi).
Now, according to Lewin, the life space alsohas a sophisticated topological structure. Asa Riemannian smooth n−manifold, the LSF–manifold Σ gives rise to its fundamental n−groupoid, or n−category Πn(Σ) (see Ivancevic,2006b, 2007a). In Πn(Σ), 0–cells are points inΣ; 1–cells are paths in Σ (i.e., parameterizedsmooth maps f : [0, 1] → Σ); 2–cells are smooth
homotopies (denoted by ≃) of paths relative
11

to endpoints (i.e., parameterized smooth mapsh : [0, 1]× [0, 1] → Σ); 3–cells are smooth homo-
topies of homotopies of paths inΣ (i.e., param-eterized smooth maps j : [0, 1]× [0, 1]× [0, 1] →Σ). Categorical composition is defined by past-
ing paths and homotopies. In this way, the fol-lowing recursive homotopy dynamics emergeson the LSF–manifold Σ (**):
12

0− cell : x0 • x0 ∈ M ; in the higher cells below: t, s ∈ [0, 1];
1− cell : x0 •f ✲ •x1 f : x0 ≃ x1 ∈ M,
f : [0, 1] → M, f : x0 7→ x1, x1 = f(x0), f(0) = x0, f(1) = x1;
e.g., linear path: f(t) = (1− t)x0 + t x1; or
Euler–Lagrangian f − dynamics with endpoint conditions (x0, x1) :
d
dtfxi = fxi , with x(0) = x0, x(1) = x1, (i = 1, ..., n);
2− cell : x0 •
f
g
h❘
✒∨ •x1 h : f ≃ g ∈ M,
h : [0, 1] × [0, 1] → M, h : f 7→ g, g = h(f(x0)),
h(x0, 0) = f(x0), h(x0, 1) = g(x0), h(0, t) = x0, h(1, t) = x1
e.g., linear homotopy: h(x0, t) = (1− t) f(x0) + t g(x0); or
homotopy between two Euler–Lagrangian (f, g)− dynamics
with the same endpoint conditions (x0, x1) :
d
dtfxi = fxi , and
d
dtgxi = gxi with x(0) = x0, x(1) = x1;
3− cell : x0 •
f
g
h ij
y x
>❘
✒•x1 j : h ≃ i ∈ M,
j : [0, 1] × [0, 1] × [0, 1] → M, j : h 7→ i, i = j(h(f(x0)))
j(x0, t, 0) = h(f(x0)), j(x0, t, 1) = i(f(x0)),
j(x0, 0, s) = f(x0), j(x0, 1, s) = g(x0),
j(0, t, s) = x0, j(1, t, s) = x1
e.g., linear composite homotopy: j(x0, t, s) = (1− t)h(f(x0)) + t i(f(x0));
or, homotopy between two homotopies between above two Euler-
Lagrangian (f, g)− dynamics with the same endpoint conditions (x0, x1).
13

On the micro–LSF level, instead of a singlepath defined by the Newtonian–like equationof motion (8), we have an ensemble of fluctuat-ing and crossing paths with weighted probabil-ities (of the unit total sum). This ensemble ofmicro–paths is defined by the simplest instanceof our adaptive path integral (5), similar to theFeynman’s original sum over histories,
〈Action|Intention〉paths =∫
Σ D[wx] eiS[x], (9)
where D[wx] is a functional measure on thespace of all weighted paths, and the exponentialdepends on the action S[x] given by (7). Thisprocedure can be redefined in a mathematicallycleaner way if we Wick–rotate the time variablet to imaginary values, t 7→ τ = it, thereby mak-ing all integrals real:
∫
Σ D[wx] eiS[x]Wick✲
∫
Σ D[wx] e−S[x]. (10)
Discretization of (10) gives the standard thermo-
dynamic–like partition function
Z =∑
j
e−wjEj/T , (11)
where Ej is the motion energy eigenvalue (re-flecting each possible motivational energetic state),T is the temperature–like environmental con-trol parameter, and the sum runs over all mo-tion energy eigenstates (labelled by the indexj). From (11), we can further calculate allthermodynamic–like and statistical propertiesof MD and CD, as for example, transition en-
tropy, S = kB lnZ, etc.
3.1 Noisy Decision Making in the LSF
From CD–perspective, our adaptive path inte-gral (9) calculates all (alternative) pathways of
information flow during the transition Intention−→ Action. In the connectionist language, (9)represents activation dynamics, to which ourMonitor process gives a kind of backpropaga-tion feedback, a common type of supervisedlearning1
ws(t+ 1) = ws(t)− η∇J(t), (12)
where η is a small constant, called the step size,or the learning rate, and ∇J(n) denotes thegradient of the ‘performance hyper–surface’ atthe t-th iteration.
Now, the basic question about our local de-cision making process, occurring under uncer-tainty at the intention formation faze F , is:Which alternative to choose? In our path–integral language this reads: Which path (al-ternative) should be given the highest proba-bility weight w? This problem can be eitheriteratively solved by the learning process (12),controlled by the MONITOR feedback, whichwe term algorithmic approach, or by the lo-cal decision making process under uncertainty,which we term heuristic approach (Ivancevicand Aidman, 2007). This qualitative analy-sis is based on the micro–level interpretationof the Newtonian–like action S[x], given by (7)and figuring both processing speed x and LTM(i.e., the force–field ϕ(x), see next subsection).Here we consider three different cases:
1. If the potential ϕ(x) is not very depen-dent upon position x(t), then the more di-rect paths contribute the most, as longer
1Note that we could also use a reward–based, rein-forcement learning rule (Suttton and Barto, 1998), inwhich system learns its optimal policy:
innovation(t) = |reward(t)− penalty(t)|.
14

paths, with higher mean square velocities[x(t)]2 make the exponent more negative(after Wick rotation (10)).
2. On the other hand, suppose that ϕ(x)does indeed depend on position x. Forsimplicity, let the potential increase forthe larger values of x. Then a direct pathdoes not necessarily give the largest con-tribution to the overall transition prob-ability, because the integrated value ofthe potential is higher than over anotherpaths.
3. Finally, consider a path that deviates wide-ly from the direct path. Then ϕ(x) de-creases over that path, but at the sametime the velocity x increases. In this case,we expect that the increased velocity xwould more than compensate for the de-creased potential over the path.
Therefore, the most important path (i.e., thepath with the highest weight w) would be theone for which any smaller integrated value ofthe surrounding field potential ϕ(x) is morethan compensated for by an increase in kinetic–like energy m
2 x2. In principle, this is neither
the most direct path, nor the longest path, butrather a middle way between the two. For-mally, it is the path along which the averageLagrangian is minimal,
<m
2x2 + ϕ(x) > −→ min, (13)
i.e., the path that requires minimal memory (bothLTM and WM) and processing speed. This me-chanical result is consistent with the ‘cognitivefilter theory’ of selective attention (Broadbent,1958), which postulates a low level filter thatallows only a limited number of percepts to
reach the brain at any time. In this theory,the importance of conscious, directed attentionis minimized. The type of attention involvinglow level filtering corresponds to the concept ofearly selection.
Although we termed this ‘heuristic approach’in the sense that we can instantly feel both theprocessing speed x and the LTM field ϕ(x) in-volved, there is clearly a psycho–physical rulein the background, namely the averaging min-imum relation (13).
From the decision making point of view, allpossible paths (alternatives) represent the con-sequences of decision making. They are, bydefault, short–term consequences, as they aremodelled in the micro–time–level. However,the path integral formalism allows calculationof the long–term consequences, just by extend-ing the integration time, tfin −→ ∞. Besides,this averaging decision mechanics – choosingthe optimal path – actually performs the ‘aver-aging lift’ in the LSF: from the micro–level tothe macro–level.
For example, one of the simplest types ofperformance–degrading disturbances in the LSFis what we term motivational fatigue – a moti-vational drag factor that slows the actors’ prog-ress towards their goal. There are two funda-mentally different sources of this motivationaldrag, both leading to apparently the same re-duction in performance: (a) tiredness / exhaus-tion and (b) satiation (e.g., boredom). Both in-volve the same underlying mechanism (the rais-ing valence of the alternatives to continuing theaction) but the alternatives will differ consider-ably, depending on the properties of the task,from self–preservation / recuperation in the ex-haustion case through to competing goals in thesatiation case.
The spatial representation of this motiva-
15

tional drag is relatively simple: uni–dimensionalLSF–coordinates may be sufficient for most pur-poses, which makes it attractive for the initialvalidation of our predictive model. Similarlyuncomplicated spatial representations can beachieved for what we term motivational boostderived from the proximity to the goal (includ-ing the well–known phenomenon of ‘the homestretch’): the closer the goal (e.g., a finishingline) is perceived to be, the stronger its ‘pullingpower’ (Lewin 1951, 1997). Combinations ofmotivational drag and motivational boost ef-fects may be of particular interest in a range ofapplications. These combinations can be mod-elled within relatively simple uni–dimensionalLSF–coordinate systems.
4 Geometric Chaos and Topo-
logical Phase Transitions
In this section we extend the LSF–formalism toincorporate geometrical chaos (Ivancevic et al,2008; Ivancevic, 2006c, 2008a) and associatedtopological phase transitions.
It is well–known that on the basis of the er-godic hypothesis, statistical mechanics describesthe physics of many–degrees of freedom sys-tems by replacing time averages of the relevantobservables with ensemble averages. Therefore,instead of using statistical ensembles, we caninvestigate the Hamiltonian (microscopic) dy-namics of a system undergoing a phase tran-sition. The reason for tackling dynamics istwofold. First, there are observables, like Lya-punov exponents, that are intrinsically dynam-ical. Second, the geometrization of Hamilto-nian dynamics in terms of Riemannian geom-etry provides new observables and, in general,an interesting framework to investigate the phe-
nomenon of phase transitions (Caiani et al, 1997;Pettini, 2007). The geometrical formulationof the dynamics of conservative systems (seeIvancevic, 2006b, 2008a) was first used by Krylov(1979) in his studies on the dynamical founda-tions of statistical mechanics and subsequentlybecame a standard tool to study abstract sys-tems in ergodic theory.
The simplest, mechanical–like LSF–actionin the individual’s LSF–manifold Σ has a Rie-mannian locomotion form (summation conven-tion is always assumed)
S[q] =1
2
∫ tfin
tini
[aij qiqj − V (q)] dt, (14)
where aij is the ‘material’ metric tensor thatgenerates the total ‘kinetic energy’ of cognitive(loco)motions defined by their configuration co-ordinates qi and velocities qi, with the motiva-tional potential energy V (q) and the standardHamiltonian
H(p, q) =
N∑
i=1
1
2p2i + V (q), (15)
where pi are the canonical (loco)motion mo-menta.
Dynamics of N DOF mechanical–like sys-tems with action (14) and Hamiltonian (15) arecommonly given by the set of geodesic equations(Ivancevic, 2006b, 2007a)
d2qi
ds2+ Γi
jk
dqj
ds
dqk
ds= 0, (16)
where Γijk are the Christoffel symbols of the
affine Levi–Civita connection of the Rieman-nian LSF–manifold Σ.
Alternatively, a description of the extremaof the Hamilton’s action (14) can be obtained
16

using the Eisenhart metric (see Eisenhart, 1929)on an enlarged LSF space-time manifold (givenby {q0 ≡ t, q1, . . . , qN} plus one real coordinateqN+1), whose arc–length is
ds2 = −2V (q)(dq0)2 + aijdqidqj + 2dq0dqN+1.
(17)The manifold has a Lorentzian structure (Pet-tini, 2007) and the dynamical trajectories arethose geode-sics satisfying the condition ds2 =Cdt2, where C is a positive constant. In thisgeometrical framework, the instability of thetrajectories is the instability of the geodesics,and it is completely determined by the curva-ture properties of the LSF–manifold Σ accord-ing to the Jacobi equation of geodesic deviation(see Ivancevic, 2006b, 2007a)
D2J i
ds2+Ri
jkm
dqj
dsJk dq
m
ds= 0, (18)
whose solution J , usually called Jacobi vari-
ation field, locally measures the distance be-tween nearby geodesics; D/ds stands for thecovariant derivative along a geodesic and Ri
jkm
are the components of the Riemann curvaturetensor of the LSF–manifold Σ.
Using the Eisenhart metric (17), the rele-vant part of the Jacobi equation (18) is givenby the tangent dynamics equation (Casetti etal, 1996; Caiani et al, 1997)
d2J i
dt2+Ri
0k0Jk = 0, (i = 1, . . . , N), (19)
where the only non-vanishing components ofthe curvature tensor of the LSF–manifold Σ
are
Ri0k0 = ∂2V/∂qi∂qj.
The tangent dynamics equation (19) is com-monly used to define Lyapunov exponents in
dynamical systems given by the Riemannianaction (14) and Hamiltonian (15), using the for-mula (Casetti et al, 2000)
λ1 = limt→∞
1/2t log(ΣNi=1[J
2i (t) (20)
+ J2i (t)]/Σ
Ni=1[J
2i (0) + J2
i (0)]).
Lyapunov exponents measure the strength of
dynamical chaos.Now, to relate these results to topological
phase transitions within the LSF–manifold Σ,recall that any two high–dimensional manifoldsΣv and Σv′ have the same topology if they canbe continuously and differentiably deformed intoone another, that is if they are diffeomorphic.Thus by topology change the ‘loss of diffeomor-phicity’ is meant (Pettini, 2007). In this re-spect, the so–called topological theorem (Fran-zosi and Pettinni, 2004) says that non–analyti-city is the ‘shadow’ of a more fundamental phe-nomenon occurring in the system’s configura-tion manifold (in our case the LSF–manifold):a topology change within the family of equipo-tential hypersurfaces
Σv = {(q1, . . . , qN ) ∈ RN | V (q1, . . . , qN ) = v},
where V and qi are the microscopic interactionpotential and coordinates respectively. Thistopological approach to PTs stems from the nu-merical study of the dynamical counterpart ofphase transitions, and precisely from the obser-vation of discontinuous or cuspy patterns dis-played by the largest Lyapunov exponent λ1 atthe transition energy (Casetti et al, 2000). Lya-punov exponents cannot be measured in labo-ratory experiments, at variance with thermo-dynamic observables, thus, being genuine dy-namical observables they are only be estimatedin numerical simulations of the microscopic dy-
17

namics. If there are critical points of V in con-figuration space, that is points qc = [q1, . . . , qN ]such that ∇V (q)|q=qc
= 0, according to theMorse Lemma (see e.g., Hirsch, 1976), in theneighborhood of any critical point qc there al-ways exists a coordinate systemq(t) = [q1(t), .., qN (t)] for which
V (q) = V (qc)− q21 − · · · − q2k + q2k+1 + · · ·+ q2N ,(21)
where k is the index of the critical point, i.e.,the number of negative eigenvalues of the Hes-sian of the potential energy V . In the neigh-borhood of a critical point of the LSF–manifoldΣ, (21) yields
∂2V/∂qi∂qj = ±δij ,
which gives k unstable directions which con-tribute to the exponential growth of the normof the tangent vector J (Casetti et all, 2000).
This means that the strength of dynami-cal chaos within the individual’s LSF–manifoldΣ, measured by the largest Lyapunov exponentλ1 given by (20), is affected by the existence ofcritical points qc of the potential energy V (q).However, as V (q) is bounded below, it is a goodMorse function, with no vanishing eigenvaluesof its Hessian matrix. According to Morse the-
ory, the existence of critical points of V is asso-ciated with topology changes of the hypersur-faces {Σv}v∈R.
More precisely, let VN (q1, . . . , qN ) : RN →R, be a smooth, bounded from below, finite-range and confining potential2. Denote by Σv =V −1(v), v ∈ R, its level sets, or equipotentialhypersurfaces, in the LSF–manifold Σ. Then
2These requirements for V are fulfilled by standardinteratomic and intermolecular interaction potentials,as well as by classical spin potentials.
let v = v/N be the potential energy per degreeof freedom. If there exists N0, and if for anypair of values v and v′ belonging to a given in-terval Iv = [v0, v1] and for any N > N0 thenthe sequence of the Helmoltz free energies{FN (β)}N∈N – where β = 1/T (T is the tem-perature) and β ∈ Iβ = (β(v0), β(v1)) – isuniformly convergent at least in C2(Iβ) [thespace of twice differentiable functions in the in-terval Iβ], so that limN→∞ FN ∈ C2(Iβ) andneither first nor second order phase transitionscan occur in the (inverse) temperature interval(β(v0), β(v1)), where the inverse temperature isdefined as (Pettini, 2007)
β(v) = ∂S(−)N (v)/∂v, while
S(−)N (v) = N−1 log
∫
V (q)≤vNdNq
is one of the possible definitions of the micro-canonical configurational entropy. The inten-sive variable v has been introduced to ease thecomparison between quantities computed at dif-ferent N -values.
This theorem means that a topology changeof the {Σv}v∈R at some vc is a necessary con-dition for a phase transition to take place atthe corresponding energy value. The topol-ogy changes implied here are those describedwithin the framework of Morse theory through‘attachment of handles’ to the LSF–manifold Σ
(Hirsch, 1976).In the LSF path–integral language, we can
say that suitable topology changes of equipo-tential submanifolds of the individual’s LSF–manifoldΣ can entail thermodynamic–like phasetransitions, according to the general formula:
〈phase out |phase in〉 :=∫
topology−changeΣ D[wΦ] eiS[Φ].
18

The statistical behavior of the LSF–(loco)moti-on system (14) with the standard Hamiltonian(15) is encompassed, in the canonical ensemble,by its partition function, given by the phase–space path integral (Ivancevic, 2007a, 2008a)
ZN =
∫
top−chΣ D[p]D[q] exp{i
∫ t′
t[pq−H(p, q)] dτ},
(22)where we have used the shorthand notation∫
top−chΣ D[p]D[q] ≡
∫
∏
τ
dq(τ)dp(τ )
2π.
The phase–space path integral (22) can be cal-culated as the partition function (Franzosi etal, 2000)
ZN (β) =
∫ N∏
i=1
dpidqie−βH(p,q)
=
(
π
β
)N2
∫ N∏
i=1
dqie−βV (q)
=
(
π
β
)N2
∫ ∞
0dv e−βv
∫
Σv
dσ
‖∇V ‖, , (23)
where the last term is written using the so–called co–area formula (Federer, 1969), and vlabels the equipotential hypersurfaces Σv of theLSF–manifold Σ,
Σv = {(q1, . . . , qN ) ∈ RN |V (q1, . . . , qN ) = v}.
Equation (23) shows that the relevant statis-tical information is contained in the canonicalconfigurational partition function
ZCN =
∫
∏
dqiV (q)e−βV (q).
Note that ZCN is decomposed, in the last term
of (23), into an infinite summation of geometric
integrals,
∫
Σv
dσ /‖∇V ‖,
defined on the {Σv}v∈R. Once the microscopicinteraction potential V (q) is given, the configu-ration space of the system is automatically fo-liated into the family {Σv}v∈R of these equipo-tential hypersurfaces. Now, from standard sta-tistical mechanical arguments we know that, atany given value of the inverse temperature β,the larger the number N , the closer to Σv ≡Σuβ
are the microstates that significantly con-tribute to the averages, computed through ZN (β),of thermodynamic observables. The hypersur-face Σuβ
is the one associated with
uβ = (ZCN )−1
∫
∏
dqiV (q)e−βV (q),
the average potential energy computed at a givenβ. Thus, at any β, if N is very large the effec-tive support of the canonical measure shrinksvery close to a single Σv = Σuβ
. Hence, thebasic origin of a phase transition lies in a suit-able topology change of the {Σv}, occurringat some vc (Franzosi et al, 2000). This topol-ogy change induces the singular behavior of thethermodynamic observables at a phase transi-tion. It is conjectured that the counterpart of aphase transition is a breaking of diffeomorphic-ity among the surfaces Σv, it is appropriate tochoose a diffeomorphism invariant to probe ifand how the topology of the Σv changes as afunction of v. Fortunately, such a topologicalinvariant exists, the Euler characteristic of theLSF–manifold Σ, defined by (Ivancevic, 2007a)
χ(Σ) =
N∑
k=0
(−1)kbk(Σ), (24)
19

where the Betti numbers bk(Σ) are diffeomor-phism invariants.3 This homological formulacan be simplified by the use of the Gauss–Bonnet–Hopf theorem, that relates χ(Σ) with the totalGauss–Kronecker curvature KG of the LSF–manifold Σ
χ(Σ) =
∫
ΣKG dσ, (25)
where
dσ =√
det(a)dx1dx2 · · · dxn
is the invariant volume measure of the LSF–manifold Σ and a is the determinant of theLSF metric tensor aij (Ivancevic, 2008a).
The domain of validity of the ‘quantum’ isnot restricted to the microscopic world (Umezawa,1993). There are macroscopic features of clas-sically behaving systems, which cannot be ex-plained without recourse to the quantum dy-namics. This field theoretic model leads to theview of the phase transition as a condensationthat is comparable to the formation of fog andrain drops from water vapor, and that mightserve to model both the gamma and beta phasetransitions. According to such a model, theproduction of activity with long-range correla-tion in the brain takes place through the mech-anism of spontaneous breakdown of symmetry(SBS), which has for decades been shown to de-scribe long-range correlation in condensed mat-ter physics. The adoption of such a field theo-retic approach enables modelling of the wholecerebral hemisphere and its hierarchy of com-ponents down to the atomic level as a fully in-tegrated macroscopic quantum system, namely
3The Betti numbers bk are the dimensions of the deRham’s cohomology vector spaces Hk(Σ;R) (thereforethe bk are integers).
as a macroscopic system which is a quantumsystem not in the trivial sense that it is made,like all existing matter, by quantum compo-nents such as atoms and molecules, but in thesense that some of its macroscopic propertiescan best be described with recourse to quan-tum dynamics (see Freeman and Vitiello, 2006and references therein).
Phase transitions can also be associated withautonomous robot competence levels, as infor-mal specifications of desired classes of behav-iors for robots over all environments they willencounter, as described by Brooks’ subsump-tion architecture approach. The distributednetwork of augmented finite–state machines canexist in different phases or modalities of theirstate–space variables, which determine the sys-tems intrinsic behavior. The phase transitionrepresented by this approach is triggered by ei-ther internal (a set–point) or external (a com-mand) control stimuli, such as a command totransition from a sleep mode to awake mode,or walking to running.
5 Joint Action of Several
Agents
In this section we propose an LSF–based modelof the joint action of two or more actors, whereactors can be both humans and robots. Thisjoint action takes place in the joint LSF mani-fold ΣJ , composed of individual LSF manifoldsΣα,Σβ, .... It has a sophisticated geometricaland dynamical structure as follows.
To model the dynamics of the two–actor co–action, we propose to associate each of the ac-tors with a set of their own time dependent tra-jectories, which constitutes an n−dimensionalRiemannian LSF–manifold, Σα = {xi(ti)} and
20

Σβ = {yj(tj)}, respectively. Their associatedtangent bundles contain their individual nD(loco)motion velocities, TΣα = {xi(ti) = dxi/dti}and TΣβ = {yj(tj) = dyj/dtj}. Further, fol-lowing the general LSF–formalism, outlined inthe introduction, we use the modelling machin-ery consisting of: (i) Adaptive joint action atthe top–master level, describing the externally–appearing deterministic, continuous and smoothdynamics, and (ii) Corresponding adaptive pathintegral (30) at the bottom–slave level, describ-ing a wildly fluctuating dynamics including bothcontinuous trajectories and Markov chains. Thislower–level joint dynamics can be further dis-cretized into a partition function of the corre-sponding statistical dynamics.
The smooth joint action with two terms,representing cognitive/motivational potential en-ergy and physical kinetic energy, is formallygiven by:
A[x, y; ti, tj ] =
1
2
∫
ti
∫
tj
αiβj δ(I2ij) x
i(ti) yj(tj) dtidtj
+1
2
∫
tgij x
i(t)xj(t) dt, (26)
with I2ij =[
xi(ti)− yj(tj)]2
,
where IN ≤ ti, tj, t ≤ OUT.
The first term in (26) represents potential en-ergy of the cognitive/motivational interactionbetween the two agents αi and βj .
4 It is a dou-ble integral over a delta function of the squareof interval I2 between two points on the pathsin their Life–Spaces; thus, interaction occursonly when this interval, representing the mo-tivational cognitive distance between the two
4Although, formally, this term contains cognitive ve-locities, it still represents ‘potential energy’ from thephysical point of view.
agents, vanishes. Note that the cognitive (loco)motions of the two agents αi[x
i(ti)] and βj [yj(tj)],
generally occur at different times ti and tj un-less ti = tj , when cognitive synchronization oc-curs.
The second term in (26) represents kineticenergy of the physical interaction. Namely, whenthe cognitive synchronization in the first termtakes place, the second term of physical kineticenergy is activated in the common manifold,which is one of the agents’ Life Spaces, sayΣα = {xi(ti)}.
Conversely, if we have a need to representcoaction of three actors, say αi, βj and γk (e.g.,αi in charge of acceleration, βj – decelerationand γk− steering), we can associate each ofthem with an nD Riemannian Life–Space man-ifold, Σα = {xi(ti)}, Σβ = {yj(tj)}, and Σγ ={zk(tk)}, respectively, with the correspondingtangent bundles containing their individual (loco)motion velocities, TΣα = {xi(ti) = dxi/dti},TΣβ = {yj(tj) = dyj/dtj} and TΣγ = {zk(tk)= dzk/dtk}. Then, instead of (26) we have
A[ti, tj , tk; t] =
1
2
∫
ti
∫
tj
∫
tk
αi(ti)βj (tj) γk (tk)×
δ(I2ijk) xi(ti) y
j(tj) zk(tk) dtidtjdtk
+1
2
∫
tWM
rs (t, q, q) qr qs dt, (27)
where IN ≤ ti, tj , tk, t ≤ OUT, with
I2ijk = [xi(ti)− yj(tj)]2 + [yj(tj)− zk(tk)]
2
+ [zk(tk)− xi(ti)]2,
Due to an intrinsic chaotic coupling, thethree–actor (or, n−actor, n > 3) joint action(27) has a considerably more complicated geo-metrical structure then the bilateral co–action
21

(26).5 It actually happens in the common 3nDFinsler manifold ΣJ = Σα ∪ Σβ ∪ Σγ , param-eterized by the local joint coordinates depen-dent on the common time t. That is, ΣJ ={qr(t), r = 1, ..., 3n}. Geometry of the jointmanifold ΣJ is defined by the Finsler metricfunction ds = F (qr, dqr), defined by
F 2(q, q) = grs(q, q)qr qs, (28)
and the Finsler tensor Crst(q, q), defined by(Ivancevic, 2007a)
Crst(q, q) =1
4
∂3F 2(q, q)
∂qr∂qs∂qt=
1
2
∂grs∂qr∂qs
. (29)
From the Finsler definitions (28)–(29), it fol-lows that the partial interaction manifolds, Σα∪Σβ, Σβ ∪ Σy and Σα ∪ Σy, have Riemannianstructures with the corresponding interactionkinetic energies,
Tαβ =1
2gij x
iyj , Tαγ =1
2gikx
izk,
Tβγ =1
2gjky
j zk.
At the slave LSF–level, the adaptive pathintegral, representing an ∞−dimensional neu-ral network, corresponding to the adaptive bi-lateral joint action (26), reads
〈OUT |IN〉 :=∫
Σ D[w, x, y] eiA[x,y;ti,tj ], (30)
where the Lebesgue integration is performedover all continuous paths xi = xi(ti) and yj =yj(tj), while summation is performed over allassociated discrete Markov fluctuations andjumps. The symbolic differential in the path
5Recall that the necessary condition for chaos in con-tinuous temporal or spatio-temporal systems is to havethree variables with nonlinear couplings between them.
integral (30) represents an adaptive path mea-sure, defined as a weighted product
D[w, x, y] = limN→∞
N∏
s=1
wsijdx
idyj, (31)
(i, j = 1, ..., n).
Similarly, in case of the triple joint action,the adaptive path integral reads,
〈OUT |IN〉 :=∫
Σ D[w;x, y, z; q] eiA[ti ,tj ,tk ;t],(32)
with the adaptive path measure defined by
D[w;x, y, z; q] = limN→∞
N∏
S=1
wSijkrdx
idyjdzkdqr,
(i, j, k = 1, ..., n; r = 1, ..., 3n). (33)
The proposed path integral approach repre-sents a new family of more expansive function-representation methods, which is now capableof representing input/output behavior of morethan one actor. However, as we add the sec-ond and subsequent actors to the model, therequirements for the rigorous geometrical rep-resentations of their respective LSFs becomenontrivial. For a single actor or a two–actorco–action the Riemannian geometry was suffi-cient, but it becomes insufficient for modellingthe n–actor (with n ≥ 3) joint action, due toan intrinsic chaotic coupling between the in-dividual actors’ LSFs. To model an n–actorjoint LSF, we have to use the Finsler geome-try, which is a generalization of the Riemannianone. This progression may seem trivial, bothfrom standard psychological point of view, andfrom computational point of view, but it is nottrivial from the geometrical perspective.
Our extended LSF formalism is closely re-lated to the Haken-Kelso-Bunz (HKB) model
22

of self-organization in the human motor sys-tem (Haken et al, 1985; Kelso, 1995), including:multi-stability, phase transitions and hystere-sis effects, presenting a contrary view to thepurely feedback driven neural systems. HKBuses the concepts of synergetics (order param-eters, control parameters, instability, etc) andthe mathematical tools of nonlinearly coupled(nonlinear) dynamical systems to account forself-organized behavior both at the coopera-tive, coordinative level and at the level of theindividual coordinating elements. The HKBmodel stands as a building block upon whichnumerous extensions and elaborations have beenconstructed. In particular, it has been possibleto derive it from a realistic model of the corticalsheet in which neural areas undergo a reorga-nization that is mediated by intra- and inter-cortical connections. Also, the HKB model de-scribes phase transitions (‘switches’) in coordi-nated human movement as follows: (i) whenthe agent begins in the anti-phase mode andspeed of movement is increased, a spontaneousswitch to symmetrical, in-phase movement oc-curs; (ii) this transition happens swiftly at acertain critical frequency; (iii) after the switchhas occurred and the movement rate is now de-creased the subject remains in the symmetricalmode, i.e. she does not switch back; and (iv) nosuch transitions occur if the subject begins withsymmetrical, in-phase movements. The HKBdynamics of the order parameter relative phaseas is given by a nonlinear first-order ODE:
φ = (α+ 2βr2) sinφ− βr2 sin 2φ,
where φ is the phase relation (that character-izes the observed patterns of behavior, changesabruptly at the transition and is only weaklydependent on parameters outside the phase tran-sition), r is the oscillator amplitude, while α, β
are coupling parameters (from which the criti-cal frequency where the phase transition occurscan be calculated).
From a quantum perspective, closely relatedto the LSF model are the recent developmentsof Hong and Newell (2008a, 2008b) in motorcontrol that deal with feedback information andenvironmental uncertainty. The probabilisticnature of human action can be characterizedby entropies at the level of the organism, task,and environment. Systematic changes in motoradaptation are characterized as task–organismand environment–organism tradeoffs in entropy.Such compensatory adaptations lead to a viewof goal–directed motor control as the productof an underlying conservation of entropy acrossthe task-organism-environment system. Theconservation of entropy supports the view thatcontext dependent adaptations in human goal–directed action are guided fundamentally bynatural law and provides a novel means of ex-amining human motor behavior. This is funda-mentally related to the Heisenberg uncertainty
principle and further support the argument forthe primacy of a probabilistic approach towardthe study of bio-psychological systems.
23

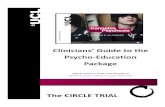
Figure 2: Diagram of the life space foam: classical representation of Lewinian life space, with
an adaptive path integral
∫
Σ (denoting integration over continuous paths and summation overdiscrete Markov jumps) acting inside it and generating microscopic fluctuation dynamics.
24

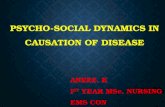
Figure 3: Transition–propagator corresponding to each of the motivational phases {F ,I,M,T },consisting of an ensemble of feedforward paths propagating through the ‘wood of obstacles’.The paths affected by driving and restraining force–fields, as well as by the local LSF–geometry.Transition goes from Intention, occurring at a sample time instant t0, to Action, occurring atsome later time t1. Each propagator is controlled by its own Monitor feedback.
25

Figure 4: Feynman action for modelling human joint action, including potential energy (motivational
cognition) in two timescales, physical energy in a single timescale (after synchronization has already
occurred), and the distance between two agents in the motivational cognition space.
26

6 Conclusion
General stochastic and quantum dynamics, de-veloped in a framework of Feynman path inte-grals, have recently been applied by Ivancevicand Aidman (2007) to Lewinian field–theoreticpsychodynamics, resulting in the developmentof a new concept of Life–Space Foam (LSF) asa natural medium for motivational (MD) andcognitive (CD) psychodynamics. According tothe LSF–formalism, the classic Lewinian lifespace can be macroscopically represented as asmooth manifold with steady force–fields andbehavioral paths, while at the microscopic levelit is more realistically represented as a collec-tion of wildly fluctuating force–fields, (loco)mo-tion paths and local geometries (and topolo-gies with holes). This paper extends the LSF–model to incorporate the notion of phase tran-sitions and complements it with embedded geo-metrical chaos. As a result, the extended LSF–model is able to rigorously represent co–actionby two or more human–like agents in the com-mon LSF–manifold. The extended LSF–modelis also related to the HKB–model of self-organi-zation in the human motor system, presentinga contrary view to the purely feedback drivenneural systems, as well as Hong–Newell entropy–approach to adaptation in human goal–directedmotor control.
References
Amari S. Dynamics of pattern formation inlateral-inhibition type neural fields. Biol Cy-bern 1977;27:77–87.
Bernstein NA, Latash ML and Turvey MT(Eds). Dexterity and its development. Hills-dale NJ England: Lawrence ErlbaumAssociates
1996.Bernstein NA. Some emergent problems of
the regulation of motor acts. In: Whiting H(ed) Human Motor Actions: Bernstein Reassessed343–358. North Holland, Amsterdam 1982.
Bernstein NA. The Coordination and Regu-lation of Movements. Pergamon London 1967.
Broadbent DE. Perception and communi-cations. Pergamon Press, London 1958.
Brooks RA. A Robust Layered Control Sys-tem for a Mobile Robot. IEEE Trans Rob Aut1986;(2)1:14–23.
Brooks RA. A robot that walks: Emergentbehavior form a carefully evolved network. NeuComp 1989;12:253–262.
Brooks RA. Elephants Don’t Play Chess.Rob Aut Sys 1990;6:3–15.
Busemeyer JR, Wang Z and Townsend JT.Quantum dynamics of human decision-making.J Math Psych 2006;50:220–241.
Caiani L, Casetti L, Clementi C and Pet-tini M. Geometry of Dynamics Lyapunov Ex-ponents and Phase Transitions. Phys Rev Lett1997;79:4361-4364.
Casetti L, Clementi C and Pettini M. Rie-mannian theory of Hamiltonian chaos and Lya-punov exponents. Phys Rev E 1996;54:5969.
Casetti L, Pettini M and Cohen EGD. Geo-metric Approach to Hamiltonian Dynamics andStatistical Mechanics. Phys Rep 2000;337:237-341.
Droll, JA, Hayhoe, MM, Triesch, J and Sul-livan, BT. Task demands control acquisitionand storage of visual information. J Exp Psych:Hum Perc Perf 2005;31:14161438.
Eisenhart LP. Dynamical trajectories andgeodesics. Math Ann 1929;30:591–606.
Federer H. Geometric Measure Theory.Springer New York 1969.
27

Fogassi L, Ferrari PF, Gesierich B, Rozzi S,Chersi F and Rizzolatti G. Parietal lobe: Fromaction organization to intention understanding.Science 2005;29:662–667.
Franzosi R and Pettini M. Theorem on theorigin of Phase Transitions. Phys Rev Lett2004;92:060601.
Franzosi R, Pettini M, Spinelli L. Topol-ogy and phase transitions: a paradigmatic evi-dence. Phys Rev Lett 2000;84:2774–2777.
FreemanWJ and Vitiello G. Nonlinear braindynamics as macroscopic manifestation of un-derlying many-body field dynamics. Phys LifeRev 2006;(3)2:93–118.
Freeman WJ. Mass Action in the NervousSystem. Acad Press, New York 1975/2004.
Freeman WJ. Neurodynamics. An Explo-ration of Mesoscopic Brain Dynamics. Springer,London 2000.
Gardiner C.W. Handbook of Stochastic Meth-ods for Physics Chemistry and Natural Sciences2nd ed. Springer, New York 1985.
Glimcher PW. Indeterminacy in brain andbehaviour. Ann Rev Psych 2005;56:25–56.
Gold M. A Kurt Lewin Reader the Com-plete Social Scientist. Am Psych Assoc Wash-ington 1999.
Haken H. Advanced Synergetics: Instabil-ity Hierarchies of Self-Organizing Systems andDevices (3nd ed). Springer, Berlin 1993.
Haken H. Principles of Brain Functioning:A Synergetic Approach to Brain Activity Be-havior and Cognition. Springer, Berlin 1996.
Haken H. Synergetics: An Introduction (3rded). Springer, Berlin 1983.
Haken, H, Kelso, JAS and Bunz H. A the-oretical model of phase transitions in humanhand movements. Biol Cybern 1985;51:347–356.
Heermann DW. Computer Simulation Meth-ods in Theoretical Physics (2nd ed). Springer,Berlin 1990.
Hirsch MW. Differential Topology. Springer,New York 1976.
Hong SL, Newell KM. Entropy compensa-tion in human motor adaptation. Chaos2008b;18(1):013108.
Hong SL, Newell KM. Entropy conserva-tion in the control of human action. Nonl DynPsych Life Sci 2008a;12(2):163-190.
Ivancevic T, Jain L, Pattison J and HarizA. Nonlinear Dynamics and Chaos Methods inNeurodynamics and Complex Data Analysis.Nonl Dyn 2008(in press, on line first, Springer).
Ivancevic V and Aidman E. Life-space foam:A medium for motivational and cognitive dy-namics. Physica A 2007;382:616–630.
Ivancevic V and Ivancevic T. Applied Dif-ferential Geometry: A Modern Introduction.World Scientific, Singapore 2007a.
Ivancevic V and Ivancevic T. Complex Non-linearity: Chaos, Phase Transitions, TopologyChange and Path Integrals. Springer, Berlin2008a.
Ivancevic V and Ivancevic T. ComputationalMind: A Complex Dynamics Perspective.Springer, Berlin 2007c.
Ivancevic V and Ivancevic T. GeometricalDynamics of Complex Systems: A Unified Mod-elling Approach to Physics Control Biomechan-ics Neurodynamics and Psycho-Socio-EconomicalDynamics. Springer, Dordrecht 2006b.
Ivancevic V and Ivancevic T. High–Dimen-sional Chaotic and Attractor Systems. Springer,Berlin 2006c.
Ivancevic V and Ivancevic T. Natural Bio-dynamics. World Scientific, Singapore 2006a.
Ivancevic V and Ivancevic T. Neuro–FuzzyAssociative Machinery for Comprehensive Brain
28

and Cognition Modelling. Springer, Berlin 2007b.Ivancevic V and Ivancevic T. Quantum Leap:
From Dirac and Feynman Across the Universeto Human Body and Mind. World Scientific,Singapore 2008b.
Izhikevich EM and Edelman GM. Large-Scale Model of Mammalian Thalamocortical Sys-tems. PNAS 2008;105:3593–3598.
Kelso, JAS. Dynamic Patterns: The SelfOrganization of Brain and Behavior. MIT Press,Cambridge 1995.
Knill DC, Maloney LT and TrommershauserJ. Sensorimotor Processing and Goal-DirectedMovement. J Vis 2007;7(5)i:1-2.
Knoblich G and Jordan S. Action coordina-tion in individuals and groups: Learning antic-ipatory control. J Exp Psych: Learn Mem Cog2003;29:1006–1016.
Krylov NS. Works on the foundations ofstatistical mechanics. Princeton Univ Press 1979.
Land, MF and Hayhoe, M. In what waysdo eye movements contribute to everyday ac-tivities? Vis Res 2001;41:35593565.
Lewin K. Field Theory in Social Science.Univ Chicago Press 1951.
Lewin K. Resolving Social Conflicts and FieldTheory in Social Science. Am Psych AssocWashington 1997.
Newman-Norlund RD, Noordzij ML, Meu-lenbroek RGJ and Bekkering H. Exploring thebrain basis of joint action: Co-ordination of ac-tions goals and intentions. Soc Neurosci2007;(2)1:48–65.
Pettini M. Geometry and Topology in Hamil-tonian Dynamics and Statistical Mechanics.Springer, New York 2007.
Schoner G. Dynamical Systems Approachesto Cognition. In: Cambridge Handbook of Com-putational Cognitive Modelling. Cambridge UnivPress 2007.
Sebanz N, Bekkering H and Knoblich G.Joint action: bodies and minds moving together.Tr Cog Sci 2006;(10)2:70–76.
Sutton RS and Barto AG. ReinforcementLearning: An Introduction. MIT Press, Cam-bridge 1998.
Todorov E, Jordan MI. Optimal feedbackcontrol as a theory of motor coordination. NatNeurosci 2002;(5)11:1226-1235.
Tognoli, E, Lagarde, J, DeGuzman, GC andKelso JAS The phi complex as a neuromarkerof human social coordination. PNAS2007;104(19):81908195.
Umezawa H. Advanced field theory: micromacro and thermal concepts. Am Inst Phys,New York 1993.
Wiener N. Cybernetics. Wiley, New York1961.
29