Nonlinear electroelastic deformations of dielectric elastomer ......Nonlinear electroelastic...
33
Nonlinear electroelastic deformations of dielectric elastomer composites: II — Non-Gaussian elastic dielectrics Victor Lefèvre, Oscar Lopez-Pamies n Department of Civil and Environmental Engineering, University of Illinois, Urbana–Champaign, IL 61801, USA article info Article history: Received 3 March 2016 Received in revised form 23 June 2016 Accepted 4 July 2016 Available online 27 July 2016 Keywords: Comparison medium methods Crouzeix–Raviart conforming elements Microstructures Electroactive materials Electrostriction abstract This paper presents an analytical framework to construct approximate homogenization solutions for the macroscopic elastic dielectric response — under finite deformations and finite electric fields — of dielectric elastomer composites with two-phase isotropic par- ticulate microstructures. The central idea consists in employing the homogenization so- lution derived in Part I of this work for ideal elastic dielectric composites within the context of a nonlinear comparison medium method — this is derived as an extension of the comparison medium method of Lopez-Pamies et al. (2013) in nonlinear elastostatics to the coupled realm of nonlinear electroelastostatics — to generate in turn a corresponding solution for composite materials with non-ideal elastic dielectric constituents. Com- plementary to this analytical framework, a hybrid finite-element formulation to construct homogenization solutions numerically (in three dimensions) is also presented. The proposed analytical framework is utilized to work out a general approximate homogenization solution for non-Gaussian dielectric elastomers filled with nonlinear elastic dielectric particles that may exhibit polarization saturation. The solution applies to arbitrary (non-percolative) isotropic distributions of filler particles. By construction, it is exact in the limit of small deformations and moderate electric fields. For finite deforma- tions and finite electric fields, its accuracy is demonstrated by means of direct compar- isons with finite-element solutions. Aimed at gaining physical insight into the extreme enhancement in electrostriction properties displayed by emerging dielectric elastomer composites, various cases wherein the filler particles are of poly- and mono-disperse sizes and exhibit different types of elastic dielectric behavior are discussed in detail. Contrary to an initial conjecture in the literature, it is found (inter alia) that the isotropic addition of a small volume fraction of stiff (semi-)conducting/high-permittivity particles to dielectric elastomers does not lead to the extreme electrostriction enhancements observed in ex- periments. It is posited that such extreme enhancements are the manifestation of inter- phasial phenomena. & 2016 Elsevier Ltd. All rights reserved. 1. Introduction and main analytical result In Part I of this work (Lefèvre and Lopez-Pamies, 2016), we determined a general approximate homogenization solution for the macroscopic elastic dielectric response of Gaussian dielectric elastomers filled with any type of non-percolative isotropic distribution of ideal elastic dielectric particles. In this Part II of the work, we make use of this fundamental result as Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/jmps Journal of the Mechanics and Physics of Solids http://dx.doi.org/10.1016/j.jmps.2016.07.005 0022-5096/& 2016 Elsevier Ltd. All rights reserved. n Corresponding author. E-mail addresses: [email protected] (V. Lefèvre), [email protected] (O. Lopez-Pamies). Journal of the Mechanics and Physics of Solids 99 (2017) 438–470
Transcript of Nonlinear electroelastic deformations of dielectric elastomer ......Nonlinear electroelastic...
-
Contents lists available at ScienceDirect
Journal of the Mechanics and Physics of Solids
Journal of the Mechanics and Physics of Solids 99 (2017) 438–470
http://d0022-50
n CorrE-m
journal homepage: www.elsevier.com/locate/jmps
Nonlinear electroelastic deformations of dielectric elastomercomposites: II — Non-Gaussian elastic dielectrics
Victor Lefèvre, Oscar Lopez-Pamies n
Department of Civil and Environmental Engineering, University of Illinois, Urbana–Champaign, IL 61801, USA
a r t i c l e i n f o
Article history:Received 3 March 2016Received in revised form23 June 2016Accepted 4 July 2016Available online 27 July 2016
Keywords:Comparison medium methodsCrouzeix–Raviart conforming elementsMicrostructuresElectroactive materialsElectrostriction
x.doi.org/10.1016/j.jmps.2016.07.00596/& 2016 Elsevier Ltd. All rights reserved.
esponding author.ail addresses: [email protected] (V. Lefèvr
a b s t r a c t
This paper presents an analytical framework to construct approximate homogenizationsolutions for the macroscopic elastic dielectric response — under finite deformations andfinite electric fields — of dielectric elastomer composites with two-phase isotropic par-ticulate microstructures. The central idea consists in employing the homogenization so-lution derived in Part I of this work for ideal elastic dielectric composites within thecontext of a nonlinear comparison medium method — this is derived as an extension ofthe comparison medium method of Lopez-Pamies et al. (2013) in nonlinear elastostatics tothe coupled realm of nonlinear electroelastostatics — to generate in turn a correspondingsolution for composite materials with non-ideal elastic dielectric constituents. Com-plementary to this analytical framework, a hybrid finite-element formulation to constructhomogenization solutions numerically (in three dimensions) is also presented.
The proposed analytical framework is utilized to work out a general approximatehomogenization solution for non-Gaussian dielectric elastomers filled with nonlinearelastic dielectric particles that may exhibit polarization saturation. The solution applies toarbitrary (non-percolative) isotropic distributions of filler particles. By construction, it isexact in the limit of small deformations and moderate electric fields. For finite deforma-tions and finite electric fields, its accuracy is demonstrated by means of direct compar-isons with finite-element solutions. Aimed at gaining physical insight into the extremeenhancement in electrostriction properties displayed by emerging dielectric elastomercomposites, various cases wherein the filler particles are of poly- and mono-disperse sizesand exhibit different types of elastic dielectric behavior are discussed in detail. Contrary toan initial conjecture in the literature, it is found (inter alia) that the isotropic addition of asmall volume fraction of stiff (semi-)conducting/high-permittivity particles to dielectricelastomers does not lead to the extreme electrostriction enhancements observed in ex-periments. It is posited that such extreme enhancements are the manifestation of inter-phasial phenomena.
& 2016 Elsevier Ltd. All rights reserved.
1. Introduction and main analytical result
In Part I of this work (Lefèvre and Lopez-Pamies, 2016), we determined a general approximate homogenization solutionfor the macroscopic elastic dielectric response of Gaussian dielectric elastomers filled with any type of non-percolativeisotropic distribution of ideal elastic dielectric particles. In this Part II of the work, we make use of this fundamental result as
e), [email protected] (O. Lopez-Pamies).
www.sciencedirect.com/science/journal/00225096www.elsevier.com/locate/jmpshttp://dx.doi.org/10.1016/j.jmps.2016.07.005http://dx.doi.org/10.1016/j.jmps.2016.07.005http://dx.doi.org/10.1016/j.jmps.2016.07.005http://crossmark.crossref.org/dialog/?doi=10.1016/j.jmps.2016.07.005&domain=pdfhttp://crossmark.crossref.org/dialog/?doi=10.1016/j.jmps.2016.07.005&domain=pdfhttp://crossmark.crossref.org/dialog/?doi=10.1016/j.jmps.2016.07.005&domain=pdfmailto:[email protected]:[email protected]://dx.doi.org/10.1016/j.jmps.2016.07.005
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 439
a building block to construct in turn a general approximate analytical solution for the macroscopic response of isotropicdielectric elastomer composites with non-ideal elastic dielectric constituents. This is accomplished by means of a nonlinearcomparison medium method.
We recall that comparison medium methods are analytical techniques that allow one to construct variational approx-imations for the macroscopic properties of a given composite material in terms of the macroscopic properties of anothermaterial. The latter is referred to as the comparison medium. The central defining idea of these methods can be traced back1
to the pioneering work of Talbot and Willis (1985) who laid out a complete comparison medium formalism — where thecomparison medium is of arbitrary choice, possibly nonlinear and heterogeneous — for properties characterized by convexpotentials of a single field. By introducing suitable partial Legendre transforms, Lopez-Pamies et al. (2013) extended thegeneral formalism of Talbot and Willis (1985) to nonlinear properties characterized by the class of non-convex potentialsthat are inherent to nonlinear elasticity. In this paper, we work out an extension of the comparison medium method ofLopez-Pamies et al. (2013) to the coupled realm of nonlinear electroelastostatics, where the properties of interest arecharacterized by non-convex potentials that are functions of two (one mechanical and one electrical) fields. With suitablyselected ideal elastic dielectric composites as choices for the comparison medium, we then employ this new formulation toconstruct a general approximate homogenization solution for the macroscopic elastic dielectric response of non-Gaussiandielectric elastomers filled with nonlinear elastic dielectric particles that may exhibit polarization saturation. The solution isvalid for any non-percolative two-phase isotropic particulate microstructure of choice. Aimed at scrutinizing experimentalresults for emerging dielectric elastomer composites, we work out and discuss in detail its specialization to two specifictypes of microstructures: (i) an isotropic iterative microstructure wherein the particles are infinitely polydisperse in size and(ii) an isotropic distribution of monodisperse spherical particles.
Complementary to the analytical approach outlined above, we also present in this paper a hybrid finite-element (FE)formulation to construct homogenization solutions numerically for the macroscopic elastic dielectric response of isotropicdielectric elastomer composites. These are viewed as infinite periodic media where their defining repeated unit cells containa large but finite number of particles that are randomly distributed (as dictated by a sequential adsorption algorithm) so asto approximate their isotropy. The independent variables in the conforming hybrid FE formulation that we adopt are takenas the displacement field, the electric potential, and a pressure field which allow for the analysis of the incompressiblebehaviors of the matrix and filler particles of interest in this work. The nonlinear algebraic equations that result from the FEdiscretization are solved by means of an arc-length method in order to be able to carry calculations passed the electro-mechanical limit loads inherent to nonlinear electroelastostatics. Also in complement to the analytical results to be workedout from the comparison medium method, we work out and discuss in detail FE solutions for two types of microstructures:(i) an isotropic distribution of polydisperse spherical particles of a finite number of different sizes and (ii) an isotropicdistribution of monodisperse spherical particles.
The presentation of the work is organized as follows. Section 2 introduces some basic notation and formulates theproblem that defines the macroscopic response of non-Gaussian dielectric elastomers, filled with an arbitrary isotropicdistribution of nonlinear elastic dielectric particles, under finite deformations and finite electric fields. Section 3 presents thecomparison medium method for nonlinear electroelastostatics in its general form. Its application to the class of dielectricelastomer composites described in Section 2, which constitutes the main analytical result of this paper, is presented inSection 4. For convenience, we record this main result here:
The macroscopic elastic dielectric response of a non-Gaussian dielectric elastomer with (incompressible) free-energy functionΨ ε= ( ) −W I I /2Em 1 5 , filled with any type of isotropic distribution of nonlinear elastic dielectric particles with (incompressible) free-
energy function μ= [ − ] − ( )W I I/2 3 Ep p 1 5 at volume fraction c, is characterized by the (incompressible) effective free-energyfunction
Ψμ μ ε ε
= ( − ) ( ) −( − )
[ − ] + [ − ] − ( ) + +−
−∼∼ ͠ ͠
W cc
I cc m
Im
I11
23
23
2 2 2,K E K E1 0 1 0 1 5
05
04 5
p 0 0
where = ·I F F1 , = ·I E EE4 , = ·
− −I F E F EE
T T5 are isotropic invariants of the macroscopic deformation gradient F and macroscopic
Lagrangian electric field E,
μμ μ ε
εε ε
=−
∂∂
− +−
∂∂
− + = −∂∂
−∂∂
+∂∂
∼∼ ͠ ͠ ͠⎡⎣ ⎤⎦ ⎡⎣ ⎤⎦⎛⎝⎜⎜
⎞⎠⎟⎟c I c
mI I
cm
Ic
mI
11
31
13,
1 1,K E E K E K E1 0
01
04 5 5
0 04
05
0 0
p
0
p
0
p
and μ∼0, ε∼0, m͠K0 are microstructure-dependent coefficients that are defined in terms of the solutions of two uncoupled linear pdes(given by expressions (49) below), while the variables μ0 and ε0p are implicitly defined as the solution of the following system oftwo nonlinear algebraic equations:
μ ε Ψμ
μ εε
{ } = ′( ) − = { } = ′( ) − =,2
0, ,2
0.1 0 0 10
2 0 0 50
p pp
Sections 4.1 and 4.2 report the specialization of the proposed solution to the infinitely polydisperse and the
1 The interested reader is referred to Lopez-Pamies et al. (2013) for a discussion of the historical development of comparison medium methods andfurther references on this topic.
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470440
monodisperse microstructures mentioned above. Section 5 presents the FE formulation. Section 6 provides sample resultsdetermined from the analytical approximate solution derived in Section 4 together with comparisons to FE solutions. Finally,Section 7 confronts the theoretical constitutive results derived in this work to experimental data and records some con-cluding remarks.
2. The problem
The general problem to be addressed is that of determining the macroscopic elastic dielectric response of a dielectricelastomer, filled with an isotropic distribution of particles firmly bonded across interfaces, that is subjected to arbitrarilylarge deformations and electric fields. The sizes of the particles are taken to be much smaller than the macroscopic size. Theconstitutive behaviors of the dielectric elastomer and filler particles are characterized by “total” free-energy functions Wmand Wp of the deformation gradient F and Lagrangian electric field E so that the Lagrangian pointwise (or local) constitutiverelation for the dielectric elastomer composite is formally given by
= ∂∂
( ) = − ∂∂
( ) ( )W W
SF
X F E DE
X F E, , and , , 1
with
θ θ( ) = [ − ( )] ( ) + ( ) ( ) ( )W W WX F E X F E X F E, , 1 , , . 2m p
Here, S and D denote the first Piola–Kirchhoff stress tensor and Lagrangian electric displacement field, while θ is the in-dicator function of the spatial regions occupied collectively by the particles, taking the value of 1 if the position vector X liesin a particle and zero otherwise.
The dielectric elastomer composite is considered to occupy a domain Ω, with boundary Ω∂ , in its undeformed stress-freepolarization-free configuration and, for convenience, units of length are chosen so that Ω has unit volume. The macroscopicresponse of the material is defined as the relation between the averages of the first Piola–Kirchhoff stress S and the de-formation gradient F over the volume Ω under affine displacement and electric potential boundary conditions: =x FX andΦ = − ·E X on Ω∂ , where the second-order tensor F and vector E are prescribed quantities. In this case, it follows from thedivergence theorem that ∫ ( ) =
ΩF X X Fd and ∫ ( ) =
ΩE X X Ed , and hence the derivation of the macroscopic response reduces
to finding the average stress ∫≐ ( )Ω
S S X Xd and average electric displacement ∫≐ ( )Ω
D D X Xd for given F and E. The result
reads formally as (Lopez-Pamies, 2014)
( ) ( )= ∂∂ = −∂∂ ( )
Wc
WcS
FF E D
EF E, , and , , 3
with
∫( ) ( )= ( )Ω∈ ∈W c WF E X F E X, , min max , , d . 4F EIn these last expressions, W corresponds physically to the total electroelastic free energy (per unit undeformed volume) ofthe composite, ∫ θ= ( )
Ωc X Xd is the initial volume fraction or concentration of particles, and , denote sufficiently large
sets of admissible deformation gradients F and curl-free electric fields E consistent with the applied affine boundaryconditions.
The F and D formulation: At several passages in the sequel, it will prove useful to treat the local and macroscopic electricdisplacement fields D and D as the independent local and macroscopic electric variables instead of the electric fields E and E.Among several possibilities, this can be readily accomplished with help of suitable partial Legendre transforms. Indeed, forthe case of interest here when ( )W X F E, , is concave in E, the partial Legendre transform
{ }*( ) = · + ( )( )
W WX F D D E X F E, , sup , , ,5E
which physically corresponds to the local Helmholtz free energy, allows us to write formally the local constitutive relationfor the dielectric elastomer composite in the form
= ∂*
∂( ) = ∂
*∂
( ) ( )W W
SF
X F D ED
X F D, , and , , , 6
where now D plays the role of independent electric variable. Similarly, for the case when ( )W cF E, , is concave in E, thepartial Legendre transform
{ }*( ) = · + ( ) ( )W c W cF D D E F E, , sup , , 7Eallows us to write formally the macroscopic constitutive relation for the dielectric elastomer composite in the form
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 441
( ) ( )= ∂*
∂= ∂
*
∂ ( )W
cW
cSF
F D ED
F D, , and , , 8
with D now as the independent macroscopic electric variable.For later reference, we note that the effective Helmholtz free energy *W defined by the partial Legendre transform (7)
can be computed directly from the minimization of the local Helmholtz free energy (5):
∫( ) ( )* = * ( )Ω∈ ∈W c WF D X F D X, , min min , , d . 9F DHere, it is recalled that stands for a sufficiently large set of admissible deformation gradients F consistent with affineboundary conditions and, similarly, denotes a sufficiently large set of divergence-free electric displacement fields D alsoconsistent with affine boundary conditions.
2.1. Non-Gaussian dielectric elastomers isotropically filled with nonlinear elastic dielectric particles
The object of this paper is to generate solutions for the effective free energy W defined by the variational problem (4) forthe practically relevant case of dielectric elastomer composites wherein the distribution of filler particles is isotropic, theelastomeric matrix is non-Gaussian, and the particles are nonlinear elastic dielectrics whose polarization may possiblysaturate.
Non-Gaussian dielectric elastomers: In particular, we consider in this work elastomeric matrix materials characterized byfree-energy functions of the form
Ψ ε( ) =
( ) − =
+ ∞ ( )
⎧⎨⎪⎩⎪
WI I
F EF
, 2if det 1
otherwise, 10
E
m1 5
where = ·I F F1 , = ·− −I F E F EE T T5 , Ψ is any non-negative function of choice (suitably well-behaved) satisfying the linearizationconditions
Ψ Ψ μ( ) = ′( ) = ( )3 0 and 3 2 11
with μ and ε denoting the initial shear modulus and the initial permittivity of the material; throughout this paper, we makeuse of the convention ′( ) = ( )y x y x xd /d to denote the derivative of functions of a single scalar variable. We recall that basicphysical considerations dictate that μ > 0 and ε ε≥ 0, where ε ≈ ×
−8.85 10 F/m012 stands for the permittivity of vacuum.
We remark that free-energy functions of the form (10) have been shown to describe reasonably well the response of abroad variety of dielectric elastomers over wide ranges of deformations and electric fields (see, e.g., Wissler, 2007; Lopez-Pamies, 2010). While analytical results will be worked out in Section 4 for arbitrary choices of the function Ψ , in Section 6sample numerical results will be presented in particular for the choice
Ψα
μα
μ( ) = [ − ] + [ − ]( )
αα α
αα α
− −I I I
32
332
3 .121
1
11 1
1
22 1
11 1
22 2
In this expression, μ1, μ2, α1, α2 are real-valued material parameters that may be associated with the non-Gaussian statisticaldistribution of the underlying polymer chains. In addition to its mathematical simplicity and physical meaning of itsparameters, we choose this class of functions because of its rich functional form and demonstrated descriptive and pre-dictive capabilities (Lopez-Pamies, 2010).
For later use, we note that the partial Legendre transform (5) corresponding to the local free-energy function (10) issimply given by
{ } Ψ ε* ( ) = · + ( ) = ( ) + =+ ∞ ( )
⎧⎨⎪⎩⎪
W WI I
F D D E F EF
, sup ,1
2if det 1
otherwise, 13
D
Em m
1 5
where = ·I FD FDD5 .Nonlinear elastic dielectric particles: On the other hand, we consider the elastic dielectric behavior of the filler particles to
be characterized by free-energy functions of the form
μ( ) =
[ − ] − ( ) =
+ ∞ ( )
⎧⎨⎪⎩⎪
WI I
F EF
, 23 if det 1
otherwise, 14
E
p
p1 5
where, again, = ·I F F1 , = ·− −I F E F EE T T5 , μp stands for the initial shear modulus of the particles, and is any function of choicesatisfying the linearization conditions
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470442
ε( ) = ′( ) = ( )0 0 and 0 2
, 15p
with εp denoting the initial permittivity of the particles, and the convexity conditions
′( ) > ′( ) + ″( ) > ( )I I I I0 and 2 0. 16E E E E5 5 5 5
The inequalities (16) on the function ensure that the free energy (14) is, much like (10), concave in E.Free-energy functions of the form (14) are general enough to adequately model the elastic dielectric responses over wide
ranges of deformations and electric fields of hard polymers such as polyaniline (PANI) and copper phthalocyanine oligomers(O-CuPc), ceramics such as titania (TiO2), and liquids such as Galinstan, which have been utilized/suggested as filler particlesin experimental investigations (see, e.g., Li et al., 2004; Huang et al., 2005; Liu et al., 2013; Fassler and Majidi, 2015). Weemphasize in particular that free-energy functions of the form (14) are general enough to model (albeit ignoring dissipativeeffects) polarization saturation phenomena typical, for instance, of ferroelectric ceramics at large electric fields. In this case,noting that the polarization p (per unit deformed volume) implied by (14) is given by the expression
ε ε= −∂∂
( ) − = ′( ) − ( )− −⎡⎣ ⎤⎦W Ip F E F E F E F E, 2 , 17
T E Tp0 5 0
in addition to the linearization and convexity conditions (15)–(16), it must be required that
( )( ) ε′ = + +( )
Ip
Io I
2 21/
18
E s
EE
50
55
in the limit as → ∞IE5 . In this last expression, the positive material constant ps characterizes the magnitude of the saturatedpolarization. While analytical results will be worked out in Section 4 for any function of choice, in Section 6 samplenumerical results will be presented in particular for the classical polarization-saturation model due to Debye (Langevin,1905; Debye, 1929):
( ) ε ε εε ε ε ε
= +( − )
( − )−
( − )
( )
⎡
⎣⎢⎢
⎛
⎝⎜⎜
⎛
⎝⎜⎜
⎞
⎠⎟⎟
⎞
⎠⎟⎟
⎛
⎝⎜⎜
⎞
⎠⎟⎟
⎤
⎦⎥⎥I I
p I
p
I
p2 3ln sinh
3ln
3.
19
E E sE
s
E
s5
05
2
p 0
p 0 5 p 0 5
Also for later use, we note that the partial Legendre transform (5) corresponding to the local free-energy function (14) isgiven by
{ }μ
*( ) = · + ( ) =[ − ] + *( ) =
+ ∞ ( )
⎧⎨⎪⎩⎪
W WI I
F D D E F EF
, sup , 23 if det 1
otherwise, 20
D
Ep p
p1 5
where, again, = ·I FD FDD5 and *( ) = ′( ( )) − ( ( ))− −I I z I z I/2D D D D5 5
15
15 with z
�1 denoting the inverse of the function z defined by
( ) = ( ′( ))z x x x4 2. Given the properties (15)–(16) of the function , it follows that
ε*( ) = * ( ) =
( )′0 0, 0
12
,21p
and
* ( ) > * ( ) + * ( ) > ( )′ ′ ′′I I I I0, 2 0, 22D D D D5 5 5 5
the latter of which implies that the free-energy function (20) is convex in D, in agreement with its very definition.The macroscopic response: Owing to the assumed isotropy of the microstructure and the constitutive isotropy and in-
compressibility of the matrix material (10) and filler particles (14), the resulting macroscopic elastic dielectric response isisotropic and incompressible. This implies that the effective free-energy function (4) in this case only depends on themacroscopic deformation gradient F and macroscopic Lagrangian electric field E through five invariants and becomes un-bounded for non-isochoric deformations when ≠Fdet 1. Consistent with the variables employed in Part I, with a slightabuse of notation, we write
( ) = ( ) =+ ∞ ( )
⎪
⎪⎧⎨⎩
W c W I I I I I cF E F, , , , , , , if det 1
otherwise 23
E E E1 2 4 5 6
in terms of the five standard invariants
= · = · = · = · = · ( )− − − − − − − −
I I I I IF F F F E E F E F E F F E F F E, , , , . 24T T E E T T E T T
1 2 4 5 61 1
Similarly, we write the partial Legendre transform (7) of the effective free-energy function (23) as
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 443
*( ) =*( ) =
+ ∞ ( )⎪
⎪⎧⎨⎩
W c W I I I I I cF D F, , , , , , , if det 1
otherwise 25
D D D1 2 4 5 6
in terms of the five standard invariants (24)1,2 and
= · = · = · ( )I I ID D FD FD F FD F FD, , . 26D D DT T
4 5 6
3. A nonlinear comparison medium method in nonlinear electroelastostatics
In this section, we put forth a comparison medium method that allows us to generate variational approximations for theeffective free-energy function W of a given two-phase elastic dielectric composite, as defined by the variational problem (4),in terms of the effective free-energy function, W0 say, of another elastic dielectric composite (possibly comprising finitely orinfinitely many phases). For clarity of exposition, the method is presented in its general form. Its specialization to the non-Gaussian dielectric elastomers isotropically filled with nonlinear elastic dielectric particles of interest in this work will bepresented in Section 4.
As will become apparent below, contrary to the minimax nature of the variational problem (4) defining W , the overallminimum nature of the variational problem (9) defining *W shall prove gainful in our strategy. We thus begin by con-sidering an elastic dielectric composite characterized locally by the (possibly compressible and anisotropic) two-phaseHelmholtz free-energy function θ θ*( ) = [ − ( )] * ( ) + ( ) *( )W W WX F D X F D X F D, , 1 , ,m p , where the indicator function θ is thesame as in (2). Following Lopez-Pamies et al. (2013), we consider as well an arbitrary comparison medium with pointwisefree energy *( )W X F D, ,0 , introduce the functions = ( )f f JX F D, , , and = ( )f f JX F D, , ,0 0 such that
θ θ( ) = *( ) = [ − ( )] * ( ) + ( ) *( ) = ( )f J W W W JX F D X F D X F D X F D F, , , , , 1 , , when det 27m p
and
( ) = *( ) = ( )f J W JX F D X F D F, , , , , when det , 280 0
and define the Legendre transform
( − )*( ) ≐ [ · + + · − ( ) + ( )]( )
f f Q JQ f J f JX P R F P D R X F D X F D, , , sup , , , , , , .29JF D
0, ,
0
Now, for any P, Q, and R it follows from (29) that
( ) ≥ ( ) + · + + · − ( − )*( ) ( )f J f J JQ f f QX F D X F D F P D R X P R, , , , , , , , , 300 0
and therefore that
∫ ∫( )* ≥ [ ( ) + · + + · ] − ( − )*( ) ( )Ω Ω∈ ∈W c f J JQ f f QF D X F D F P D R X X P R X, , min min , , , d , , , d , 31F D 0 0where =J Fdet here and henceforth. We recall that the minima sought in the right-hand side of (31) are over the sets and
of admissible deformation gradients ( )F X with prescribed volume average F and of admissible divergence-free electricdisplacement fields ( )D X with volume average D. A well-known property of minima of sums yields the further inequality
∫ ∫ ∫ ∫( )* ≥ *( ) + · + + · − ( − )*( ) ( )Ω Ω Ω Ω∈ ∈ ∈W c W JQ f f QF D F D F P X X D R X X P R X, , , min d min d min d , , , d , 32F F D0 0where the notation *W0 has been introduced to denote the effective free-energy function of the comparison medium withlocal free energy ( ) = *( )f J WX F D X F D, , , , ,0 0 :
∫*( ) = ( ) ( )Ω∈ ∈W f JF D X F D X, min min , , , d . 33F D0 0The second, third, and fourth terms in the right-hand side of (32) are bounded from below provided that P is a divergence-free field, Q is a constant, and R is a curl-free field. For simplicity, we select all these fields to be constant and denote them by
=P P, =Q Q , and =R R . After a standard calculation, this simplifying prescription gives
∫( )* ≥ *( ) + · + + · − ( − )*( ) ( )ΩW c W J Q f f QF D F D F P D R X P R X, , , , , , d , 340 0where the definition ≐J Fdet has been employed.
The inequality (34) is valid for any choice of constant fields P, Q , and R , as well as for any choice of local free-energyfunction ( )f JX F D, , ,0 describing the microstructure and local elastic dielectric behavior of the comparison medium. Opti-mizing with respect to P, Q , and R yields
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470444
{ }∫∫
( )* ≥ *( ) + · + + · − ( − )*( ) = *( )
+ ( − )**
( )( )
Ω
Ω⎜ ⎟⎛⎝
⎞⎠
W c W J Q f f Q W
f f J
F D F D F P D R X P R X F D
X F D
, , , sup , , , d ,
d , , .35
QP R0
, ,0 0
0
Optimizing in turn with respect to f0 leads formally to
∫( )* ≥ *( ) + ( − )* *( )( )Ω
⎜ ⎟⎪ ⎪
⎧⎨⎩
⎛⎝
⎞⎠
⎫⎬⎭W c W f f JF D F D X F D, , sup , d , , . 36f 0 00
3.1. A partially optimized explicit formulation
The computation of the optimized bound (36) involves two technical difficulties. The first one is that the function ( − )*f f0may exhibit corners, and hence the computation of the Legendre transform of its average in (36) may require the use ofsubgradients as opposed to standard differentiation; this is a difficulty that already appears in the classical context of convexenergies of a single field (see, e.g., Willis, 1991). The second and more severe technical obstacle is that the supremumoperation in (36) involves the optimization with respect to the microstructure of the comparison medium (in addition, aswell, to the optimization with respect to its constitutive elastic dielectric behavior). Such an optimization requires thecomputation of complicated integrals involving the product of different indicator functions — the indicator function θ ( )Xassociated with f and the indicator function, θ ( )X0 say, associated with f0 — in the second term of the right-hand side of (36).In this work, in the interest of analytical tractability, we shall be content with employing a partially optimized version of theresult (34) — and not the fully optimized bound (36) — which avoids the two above-mentioned technical difficultiesaltogether.
Thus, in order to avoid the use of subgradients we set =P 0, =Q 0, and =R 0 so that, upon recognizing the string ofequalities
( − )*( ) = [ − ( ) + ( )] = − [ ( ) − ( )]( )
f f f a f a f a f aX 0 0 X A B X A B X A B X A B, , 0, sup , , , , , , inf , , , , , , ,37a aA B A B
0, ,
0, ,
0
relation (34) reduces to
∫( )* ≥ *( ) + [ ( ) − ( )] ( )ΩW c W f a f aF D F D X A B X A B X, , , inf , , , , , , d . 38aA B0 , , 0
Further, in order to avoid the computation of complicated integrals in (38) we restrict attention to comparison media withthe same microstructure as the actual elastic dielectric composite, namely,
θ θ( ) = [ − ( )] ( ) + ( ) ( ) ( )f J f J f JX F D X F D X F D, , , 1 , , , , , 390 0 0m p
where the indicator function θ is the same as in (2). With this choice, relation (38) leads2 to the following lower bound for*W :
( )* ≥ *( ) + ( − ) [ ( ) − ( )] + [ ( ) − ( )] ( )W c W c f a f a c f a f aF D F D A B A B A B A B, , , 1 inf , , , , inf , , , , , 40a aA B A B0 , , m 0 , , p 0m pwhere, in analogy with (27), we have made use of the notation ( ) = * ( )f J WF D F D, , ,m m and ( ) = *( )f J WF D F D, , ,p p . Moreover,
the symmetry of relation (38) in the pairs ( * )W f, and ( * )W f,0 0 implies as well the following upper bound:
( )* ≤ *( ) + ( − ) [ ( ) − ( )] + [ ( ) − ( )]( )
W c W c f a f a c f a f aF D F D A B A B A B A B, , , 1 sup , , , , sup , , , , .41a aA B A B
0, ,
m 0, ,
p 0m p
Note that the lower bound (40) is non-trivial provided that − > − ∞f fm 0m and − > − ∞f fp 0p , while the upper bound (41) isnon-trivial provided that − < ∞f fm 0m and − < ∞f fp 0p . Combining the inequalities (40) and (41) leads to the followingapproximate solution for the effective free-energy function (9):
2 An alternative direct derivation of the formula (40) follows from a straightforward extension of the derivation of Willis (see, e.g., equation (3.3) inWillis, 1991; see also deBotton and Shmuel, 2010) of the bound of Ponte Castañeda (1991) in the context of convex energies of a single field:
∫ ∫* = * + ( * − *) ≥ + ( * − *)Ω Ω∈ ∈⎡⎣ ⎤⎦W W W W W W WX Xmin min d min dF D 0 0 0 0 .
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 445
( )* =
*( ) + ( − ) [ ( ) − ( )]
+ [ ( ) − ( )]
− > − ∞
− > − ∞
*( ) + ( − ) [ ( ) − ( )]
+ [ ( ) − ( )]
− < ∞
− < ∞( )
⎪
⎪
⎪
⎪
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎧⎨⎩⎧⎨⎩
W c
W c f a f a
c f a f a
f f
f f
W c f a f a
c f a f a
f f
f f
F D
F D A B A B
A B A B
F D A B A B
A B A B
, ,
, 1 min , , , ,
min , , , ,if
, 1 max , , , ,
max , , , ,if
,42
a
a
a
a
A B
A B
A B
A B
0, ,
m 0
, ,p 0
m 0
p 0
0, ,
m 0
, ,p 0
m 0
p 0
m
p
m
p
m
p
m
p
where the equality in this last expression has been used in the sense of a variational approximation. The result (42) is validfor any choice of free-energy functions f0m and f0p describing the elastic dielectric behaviors of the matrix and filler particles
in the comparison medium. Optimizing (42) with respect to these free energies leads formally to
}( )* =
*( ) + ( − ) [ ( ) − ( )]
+ [ ( ) − ( )]
− > − ∞
− > − ∞
*( ) + ( − ) [ ( ) − ( )]
+ [ ( ) − ( )]
− < ∞
− < ∞
( )
⎪
⎪
⎪
⎪
⎪
⎪⎧
⎨
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎧⎨⎩ ⎧⎨
⎩
⎧⎨⎩⎫⎬⎭
⎧⎨⎩
W c
W c f a f a
c f a f a
f f
f f
W c f a f a
c f a f a
f f
f f
F D
F D A B A B
A B A B
F D A B A B
A B A B
, ,
sup , 1 min , , , ,
min , , , ,
if
inf , 1 max , , , ,
max , , , ,
if.
43
f f a
a
f f a
a
A B
A B
A B
A B
,0
, ,m 0
, ,p 0
m 0
p 0
,0
, ,m 0
, ,p 0
m 0
p 0
0m 0pm
p
m
p
0m 0pm
p
m
p
Expression (43) constitutes the main result of this section: it provides a variational approximation for the effective free-energy function (9) of a two-phase elastic dielectric composite with local free energy (27) in terms of the effective free-energy function (33) of another two-phase elastic dielectric composite with local free energy (39). For the case when the
effective Helmholtz free-energy function *W resulting from (43) is convex in D, the corresponding effective free-energyfunction W in terms of F and E can be expediently computed via the following partial Legendre transform:
{ }( ) = − · − *( ) ( )W c W cF E D E F D, , sup , , . 44DIt is plain that the usefulness of the variational approximation (43) — or more generally (42) — hinges upon havingknowledge of the effective free-energy function *W0 for the comparison medium. While there have been no prior resultsavailable heretofore, we now have at our disposal the results for ideal elastic dielectric composites worked out in Part I.
4. Application to non-Gaussian dielectric elastomers isotropically filled with nonlinear elastic dielectric particles
In the sequel, we make use of the ideal elastic dielectric composites considered in Part I as choices for the comparisonmedium in the formulation (43)–(44) in order to construct an approximate homogenization solution for the effective freeenergy (4) of non-Gaussian dielectric elastomers, characterized by free-energy functions of the form (10), isotropically filledwith nonlinear elastic dielectric particles characterized by free-energy functions of the form (14).
We begin by setting
Ψε
μ( ) =
( ) + =
+ ∞( ) =
− + *( ) =
+ ∞ ( )
⎧⎨⎪⎩⎪
⎧⎨⎪⎩⎪
⎡⎣ ⎤⎦f J
I I Jf J
I I JF D F D, ,
12
if 1
otherwise,, , 2
3 if 1
otherwise, 45
D D
m1 5
p
p1 5
and
με
μ
ε( ) =− + =
+ ∞( ) =
− + =
+ ∞ ( )
⎧⎨⎪⎩⎪
⎡⎣ ⎤⎦ ⎧⎨⎪⎩⎪
⎡⎣ ⎤⎦f J
I I Jf J
I I JF D F D, , 2
31
2if 1
otherwise,
, , 23
12
if 1
otherwise. 46
D D
0
01
05
0
01
05
m m p
p
p
Upon substitution of these expressions in the general variational approximation (43), it is not difficult to deduce that theoptimal comparison medium is such that ε ε=0m , μ μ=0 pp and, moreover, that
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470446
( )
Ψμ
ε
Ψ μ
ε
Ψμ
ε
Ψ μ
ε
* =
*( ) + ( − ) [ ( ) − ( − )]
+ [ *( ) − ]
( ) − > − ∞*( ) − > − ∞
*( ) + ( − ) [ ( ) − ( − )]
+ [ *( ) − ]
( ) − < ∞*( ) − < ∞
=
+ ∞ ( )
μ ε
μ ε
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎧
⎨
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎧
⎨
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎧⎨⎩⎫⎬⎭
⎧⎨⎩
⎧⎨⎩⎫⎬⎭
⎧⎨⎩
W c
W c
c
W c
c
JF D
F D
F D, ,
max , 1 min2
3
min1
2
if/2
2 /
min , 1 max2
3
max1
2
if/2
2 /
if 1
otherwise 47
,0 1
01
50
5
1 0 1
5 5 0
,0 1
01
50
5
1 0 1
5 5 0
0 0p 1
5 p
p
0 0p 1
5 p
p
In this result, it is worth remarking that the macroscopic incompressibility constraint =J 1 that ensues from the localincompressibility constraint J¼1 in (45)–(46) is indeed the exact constraint (within the broad context of comparisonmedium methods, this is a highly non-trivial result, see, e.g., Lahellec et al., 2004, deBotton and Shmuel, 2010).
Next, we recall from Part I that the effective free-energy function (33) of an elastic dielectric composite wherein thematrix and filler particles are characterized by the ideal elastic dielectric free energies (46) reads as
μ η ηη η η*( ) =
− ++ + [ − ]
+ + +=
+ ∞ ( )
∼ ∼∼ ∼ ∼
∼
͠
⎧⎨⎪⎪
⎩⎪⎪
⎡⎣ ⎤⎦⎡⎣⎢⎢
⎤⎦⎥⎥W I m
I I I I I
I IJ
F D, 23
12 1
if 1
otherwise, 48
K
D D D D
0
01
5 02
4 0 1 5 6
03
02
2 0 10
where the coefficient η ε= ( − )∼∼ ͠ ͠m m/K K0 0 0 0 has been introduced to ease notation and the effective coefficients μ∼
0, ε∼0, m͠K0 aregiven by
∫
∫
∫
μ θ μ θ μ Γ
ε θ ε θ ε γ
θ ε θ ε Γ γ γ
= − ( ) + ( )
= − ( ) + ( )
= − ( ) + ( )( )
∼
∼
͠
Ω
Ω
Ω
⎛⎝⎜
⎡⎣ ⎤⎦ ⎞⎠⎟⎛⎝⎜
⎡⎣ ⎤⎦ ⎞⎠⎟⎛⎝⎜
⎡⎣ ⎤⎦ ⎞⎠⎟m
X X X
X X X
X X X
15
1 d ,
13
1 d ,
15
1 d .49
klmn mkl n
m m
K ijkl rij s rsuv u k v l
0 0 p ,
0 0 ,
0 , , ,
p
0 p
In these formulae, explicit use has been made of the optimality conditions ε ε=0m and μ μ=0 pp ,δ δ δ δ δ δ= ( + ) −1/2 1/3ijkl ik jl il jk ij kl with δij denoting the Kronecker delta, the notation ,i represents partial differentiation with
respect to the material point coordinate Xi, and the tensor fields Γ and γ are defined as the solutions of the followinguncoupled linear boundary value problems:
θ μ θ μ Γ δ
Γ
Ω Γ δ Ω− ( ) + ( ) + =
=
∈ = ∈ ∂
( )
⎧⎨⎪
⎩⎪
⎡⎣⎢
⎛⎝⎜
⎡⎣ ⎤⎦ ⎞⎠⎟⎤⎦⎥q XX X X X1
12
0
0
for , for
50
ijmn mkl n ij klj
mkl m
ikl ik l0 p ,
,
,
and
( )θ ε θ ε γ Ω γ Ω− ( ) + ( ) = ∈ = ∈ ∂ ( )⎡⎣ ⎡⎣ ⎤⎦ ⎤⎦ XX X X X1 0 for , for . 51i j i i i0 , ,pGranted the result (48) for the effective free-energy function of the comparison medium, irrespectively of the growth
conditions of the functions Ψ and *, the variational approximation (47) can be shown to reduce to
( )
Ψμ μ
εη η
η η η
* =
( − ) ( ) −( − )
[ − ] + −
+ *( ) − ++ + [ − ]
+ + +
=
+ ∞ ( )
∼ ∼∼ ∼ ∼
∼
͠
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
⎡⎣ ⎤⎦⎡⎣⎢⎢
⎤⎦⎥⎥
W c
cc
I
cc
m
I I I I I
I I
JF D, ,
112
32
3
21
2 1
if 1
otherwise 52
K
D D D D
10
10
1
50
55 0
24 0 1 5 6
03
02
2 0 1p 0
with
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 447
( )( )
μμ μ
η ηη η η
η η η η η
η η η
=−
( − )∂∂
−∂∂
+ [ + − ] + + −+ + +
−+ + [ − ] + [ + ] + [ + ] +
+ + ++
( )
∼ ∼∼ ∼ ∼
∼ ∼ ∼ ∼ ∼
∼ ∼ ∼
∼
͠͠
⎡
⎣⎢⎢⎢
⎛
⎝⎜⎜⎜
⎡⎣ ⎤⎦
⎞
⎠⎟⎟⎟
⎤
⎦⎥⎥⎥
cI
m
m I I I I I I I I I
I I
I I I I I I I I I
I I
11
31 3 2
1
2 2 3 3
13
53
K
KD D D D D D D
D D D D
1 10
02
0
4 02
0 1 5 4 6 1 5 5 6
03
02
2 0 1
5 02
4 0 1 5 6 1 0 1 2 02
2 03
03
02
2 0 12
0
0
and
( )( )
ε
εη η
η η η
εη
εεε
ηη η η
η η η η
η η η
=∂∂
+ + [ − ]+ + +
+ ( + )∂∂
− ∂∂
×− +
+ + +−
+ + [ − ] + +
+ + + ( )
∼∼ ∼∼ ∼ ∼
∼
∼∼ ∼ ∼
∼ ∼ ∼ ∼
∼ ∼ ∼
͠͠
͠͠
⎡
⎣⎢⎢⎢
⎤
⎦⎥⎥⎥
⎡
⎣⎢⎢⎢
⎤
⎦⎥⎥⎥
⎡
⎣⎢⎢⎢ ⎡⎣ ⎤⎦
⎤
⎦⎥⎥⎥
cm
m I I I I I
I I cm
m
I I I I
I I
I I I I I I I
I I
11
21
2 3
1,
54
K
KD D D D
K
K
D D D D D D D
502
20
5 4 02
0 1 5 6
03
02
2 0 1
02
2 00
0
0
1 5 6 0 4
03
02
2 0 1
5 02
4 0 1 5 6 1 0 2 02
03
02
2 0 12
p
0
0
p
p
0
0
p p
where the variables μ0 and ε0p are defined implicitly as the solution of the following system of two nonlinear algebraicequations:
μ ε Ψμ
μ εε
*{ } ≐ ′( ) − = *{ } ≐ * ( ) − =( )
′,2
0, ,1
20.
551 0 0 1
02 0 0 5
0p p
p
Having obtained the approximation (52) for the effective Helmholtz free energy of the composite, the final step of thederivation consist in computing its Legendre transform (44). After making use of the stationarity conditions
μ ε∂ * ∂ = ∂ * ∂ = ∂ * ∂ = ∂ * ∂ =W W W W/ / / / 01 5 0 0p and the convexity properties (22) of the function *, the result can be writtenas
( ) ( )
Ψμ μ
ε ε=
( − ) ( ) −( − )
[ − ] + −
− + +−
−=
+ ∞ ( )
∼
∼
͠ ͠
⎧
⎨⎪⎪⎪
⎩⎪⎪⎪
⎡⎣ ⎤⎦W c
cc
I
cc m
Im
IJ
F E, ,
112
32
3
2 2 2
if 1
otherwise 56
K E K E
10
10
1
50
50
4 5p 0 0
with
μμ μ ε
εε ε
=−
∂∂
[ − ] +−
∂∂
− + = −∂∂
− ∂∂
+∂∂ ( )
∼∼ ͠ ͠ ͠⎡⎣ ⎤⎦⎛⎝⎜⎜
⎞⎠⎟⎟c I c
mI I
cm
Ic
mI
11
31
13 and
1 1,
57
K E E K E K E1
0
01
04 5 5
0
0
04
05
0 0
p p
0
p
where, again, I1, IE4 , I
E5 stand for the standard ( )F E, -based invariants defined by (24)1,3,4, μ∼0, ε∼0, m͠K0 are the effective elastic
dielectric coefficients of the comparison medium, as defined by relations (49) with (50)–(51), while the variables μ0 and ε0pare defined implicitly as the solution of the system of two nonlinear algebraic equations
( )μ ε Ψ μ μ ε ε{ } ≐ ′( ) − = { } ≐ ′ − = ( ), 2 0, , 2 0. 581 0 0 10
2 0 0 50
p pp
Expression (56) constitutes the main analytical result of this paper: it provides a variational approximation for the effectivefree energy (4) of a non-Gaussian dielectric elastomer, with free-energy function (10), filled with any type of non-percolativeisotropic distribution of nonlinear elastic dielectric particles, with free-energy function (14). The following remarks are inorder.
(i) The macroscopic constitutive response. In view of the equivalence between Eqs. (57)–(58) and the stationarity conditionsμ ε∂ ∂ = ∂ ∂ = ∂ ∂ = ∂ ∂ =W W W W/ / / / 01 5 0 0p , the macroscopic electromechanical constitutive relation (3) implied by the
effective free energy (56) is given by
μ= + ⊗ − ( )∼ ͠− − − −
m pS F F E F F E F , 59KT T T
01
0
where p stands for the arbitrary hydrostatic pressure associated with the incompressibility constraint =J 1, and
ε= ( − ) + ( )∼ ͠ ͠− −
m mD E F F E. 60K KT
01
0 0
Much like the computation of the effective free energy (56) itself, the computation of the macroscopic stress (59) andmacroscopic electric displacement (60) for a given microstructure (i.e., a given indicator function θ ( )X ), givenconstitutive relations for the matrix and particles (i.e., given Ψ ( )I1 , εm, μp, and ( )I5 ), and given macroscopic deformation
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470448
gradient F and macroscopic electric field E amounts to solving the uncoupled linear pdes (50)–(51) for the fields Γ and γ ,evaluating the integrals (49) to determine the effective coefficients μ∼0, ε∼0, m͠K0, and solving the system of nonlinearalgebraic equation (58) for μ0 and ε0p.
(ii) The limit of small deformations and moderate electric fields. By construction, the effective free energy (56) isasymptotically exact in the classical limit of small deformations and moderate electric fields. Indeed, in the limit when
→F I and →E 0, the nonlinear algebraic equations (58) admit the explicit solution μ Ψ μ= ′( ) =2 30 and ε ε= ′( ) =2 00 ppto leading order, and the effective free energy (56) reduces asymptotically to (see Section 2.1 in Part I)
( )μ λ λ λ ε
λ λ λλ λ λ
=
( − ) + ( − ) + ( − ) − + +
+ ( − ) + ( − ) + ( − )=
+ ∞ ( )
∼∼
͠
⎧
⎨⎪⎪
⎩⎪⎪
⎡⎣⎢
⎤⎦⎥
⎡⎣⎢
⎤⎦⎥
⎡⎣ ⎤⎦W c
E E E
m E E EF E, ,
2 1 1 12
1 1 1if 1
otherwise. 61
K
12
22
32
12
22
32
1 12
2 22
3 32
1 2 3
Here, λ1, λ2, λ3 stand for the singular values of the macroscopic deformation gradient tensor F, E1, E2, E3 are thecomponents of the macroscopic electric field E with respect to the Lagrangian principal axes (i.e., the principal axes of
F FT), and the effective shear modulus μ∼, effective permittivity ε∼, and effective electrostrictive constant m͠K are defined by
relations (49) with (50)–(51) when evaluated at the aforementioned solution of Eqs. (58), namely, μ μ=0 and ε ε=0 pp .(iii) Independence of W on the invariants I2 and I
E6 . For finite deformations and finite electric fields, the effective free energy
(56) is in general not exact. The direct comparisons with FE simulations presented further below in Section 6 supportthat it does provide, however, an accurate approximation. In this regard, we remark in particular that the effective freeenergy (56) is independent of the invariants I2 and I
E6 . The FE simulations presented in Section 6 indicate that this
distinctive functional trait is indeed exhibited by the corresponding exact solutions.(iv) The case of ideal elastic dielectric constituents. For finite deformations and finite electric fields, the nonlinear algebraic
Eqs. (58) do not generally admit explicit solutions. There are, nonetheless, a number of special cases of practical interestfor which they do. The first one that we report here corresponds to the basic case when both the matrix and theparticles are ideal elastic dielectrics, which was the focus of Part I. Namely, when
Ψ με
( ) = [ − ] ( ) = ( )I I I I23 and
2, 62
E E1 1 5
p5
Eqs. (58) are solved by μ μ=0 and ε ε=0 pp . In this case, the effective free energy (56) reduces, of course, to the resultobtained in Part I:
( )μ ε
=− + − − =
+ ∞ ( )
∼∼ ͠ ͠⎧⎨⎪⎩⎪
⎡⎣ ⎤⎦W c Im
Im
I JF E, , 2
32 2
if 1
otherwise, 63
E K E K E1 4 5
where, as in the asymptotic result (61), the effective constants μ∼, ε∼, m͠K are defined by relations (49) with (50)–(51) whenμ μ=0 and ε ε=0 pp .
(v) The limiting case of rigid particles: μ =+∞p . The majority of existing experimental investigations on dielectric elastomercomposites involve filler particles that are mechanically much stiffer than the underlying elastomeric matrix. For ex-ample, PANI, O-CuPc, and TiO2 particles, which have been often utilized in experimental investigations (see, e.g., Li et al.,2004; Huang et al., 2005; Liu et al., 2013), all exhibit initial shear moduli that are several orders of magnitude larger thanthe shear moduli of typical dielectric elastomers, such as for instance acrylic elastomers and silicones. This prompts theanalysis of the effective free energy (56) in the limit of rigid particles when μ =+∞p .Now, for the case of rigid particles when μ =+∞p , the effective shear modulus μ∼0 of the comparison medium isnecessarily linear in μ0, while the effective electrostrictive coefficient m͠K0 is independent of μ0. More specifically, wehave that
μ μμ
= ( − ) ( )∂∂
=( )
∼ ͠c r cm
1 and 064
K0 0
0
0
with
∫ θ Γ( ) = ( − ) − ( ) ( )Ω ⎡⎣ ⎤⎦r c c X X1
5 11 d ,
65klmn mkl n,
where the field Γ here corresponds to the solution of the linear boundary value problem (50) for the choice of particleshear modulus μ =+∞p . It follows from (64) that Eq. (58)1 can be solved in closed form for μ0. The result reads as
( )μ Ψ= ′ ( )[ − ] +r c I2 3 30 1 . In turn, the effective free energy (56) simplifies to
-
(
(v
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 449
( ) ( )Ψε ε
=( − ) ( ) − + − + +
−− =
+ ∞ ( )
∼͠ ͠⎧⎨⎪
⎩⎪
⎛⎝⎜
⎡⎣ ⎤⎦⎞⎠⎟W c c r c I c
c mI
mI J
F E, ,1 3 3
2 2 2if 1
otherwise, 66
K E K E1 5
05
04 5
p 0 0
where we recall that the variable 5 is given by expression (57)2, ε∼0 and m͠K0 are the effective permittivity andelectrostrictive coefficient of the comparison medium, as defined by relations (49)2 and (49)3 with (50)–(51) for the casewhen ( )μ Ψ= ′ ( )[ − ] +r c I2 3 30 1 and μ =+∞p , while the variable ε0p is defined implicitly as the solution of the nonlinearalgebraic equation (58)2.In the absence of an electric field when =E 0, it is fitting to mention that Eq. (58)2 is solved by ε ε=0 pp and the effectivefree-energy function (66) reduces to an earlier result of Lopez-Pamies et al. (2013) for the effective stored-energyfunction of an isotropic suspension of rigid inclusions in non-Gaussian rubber (see also Section 5 of deBotton andShmuel, 2010):
( )( ) Ψ= ( − ) ( ) − + =+ ∞ ( )
⎪
⎪⎧⎨⎩
⎡⎣ ⎤⎦W c c r c I JF 0, , 1 3 3 if 1otherwise. 67
1
(vi) The limiting case of liquid-like particles: μ = 0p . Recent theoretical (Lopez-Pamies, 2014; Spinelli et al., 2015) andexperimental (Fassler and Majidi, 2015) investigations have indicated that the addition of liquid-like filler particles —that is, incompressible particles of vanishingly small shear resistance — to dielectric elastomers may have the potentialto lead to significantly enhanced elastic dielectric properties.In the present context, liquid-like particles can be modeled by setting μ = 0p . In this limiting case, much like for rigidparticles, the effective shear modulus μ∼0 of the comparison medium can be shown to depend linearly on μ0, while theeffective electrostrictive coefficient m͠K0 is independent altogether of the value of μ0. In particular, we have that
μ μμ
= ( − ) ( )∂∂
=( )
∼ ͠c l cm
1 and 068
K0 0
0
0
with
∫ θ Γ( ) = ( − ) − ( ) ( )Ω ⎡⎣ ⎤⎦l c c X X1
5 11 d ,
69klmn mkl n,
where the field Γ in this last expression corresponds to the solution of the linear boundary value problem (50) for thechoice of particle shear modulus μ = 0p . Given relations (68), it is a simple matter to recognize that Eq. (58)1 can besolved in closed form for the variable μ0. The result reads as ( )μ Ψ= ′ ( )[ − ] +l c I2 3 30 1 . This in turn leads to the followingsimplification of the effective free energy (56):
( ) ( )Ψε ε
=( − ) ( ) − + − + +
−− =
+ ∞ ( )
∼͠ ͠⎧⎨⎪
⎩⎪
⎛⎝⎜
⎡⎣ ⎤⎦⎞⎠⎟W c c l c I c
c mI
mI J
F E, ,1 3 3
2 2 2if 1
otherwise, 70
K E K E1 5
05
04 5
p 0 0
where, again, the variable 5 is given by expression (57)2, ε∼0 and m͠K0 are the effective permittivity and electrostrictivecoefficient of the comparison medium, as defined by relations (49)2 and (49)3 with (50)–(51) for the case when
( )μ Ψ= ′ ( )[ − ] +l c I2 3 30 1 and μ = 0p , while the variable ε0p is defined implicitly by Eq. (58)2.vii) The F and D formulation. With help of the effective Helmholtz free energy (52) and relations (8), it is straightforward to
partly invert the macroscopic constitutive relations (59)–(60) in order to rewrite them with the electric displacementfield D playing the role of electric independent variable instead of the electric field E. The result reads as
( )
μη η η
η η ηη
η η ηη η
= − −+ + [ − ]
+ + +−
++ + +
− ⊗ − ⊗ + + ⊗( )
∼ ∼ ∼
∼ ∼ ∼∼
∼ ∼ ∼∼ ∼
∼͠
͠
− − − −
⎜ ⎟
⎡⎣ ⎤⎦⎡⎣⎢
⎤⎦⎥
⎡⎣ ⎤⎦⎛⎝
⎡⎣⎢
⎤⎦⎥
⎞⎠
qI I I I I
m I I
m I II I
S F F F F F F
F FD F FD FF FD D FD D
1
1
11 ,
71
TD D D D
K
T T
K
D T T
00 5 0
34 0
21 5 6
03
02
2 0 12 0
1
03
02
2 0 10 5 1 0
0
0
where we recall that η ε= ( − )∼∼ ͠ ͠m m/K K0 0 0 0, q stands for the arbitrary hydrostatic pressure associated with theincompressibility constraint =J 1, and
( )η η η η η η= + + + + + − ( )∼ ∼ ∼∼ ∼ ∼
͠ ⎡⎣ ⎤⎦⎡⎣⎢
⎤⎦⎥m I I IE F FD D F FF FD
1
11 .
72K
T T T
03
02
2 0 11 0 0
20
0
iii) Material instabilities. In addition to facilitating the computation of the macroscopic electromechanical constitutive re-sponse (71)–(72), the effective Helmholtz free-energy function (52) in terms of F and D provides the means toconveniently determine the possible onset of two classes of material instabilities: (i) instabilities associated with
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470450
electromechanical limit loads and (ii) microstructural instabilities of long wavelength. Section 5.2 of Part I discusses therelevant conditions that signal the triggering of these instabilities and hence we do not repeat them here.
As already indicated above, the variational solution (56) applies to arbitrary non-percolative isotropic distributions offiller particles. With the two-pronged objective of demonstrating its use and of facilitating comparisons with experimentalresults, in the next two subsections we present the specialization of the approximation (56) to two specific types of isotropicdistributions of filler particles: (i) an isotropic iterative microstructure wherein the particles are infinitely polydisperse insize and (ii) an isotropic distribution of monodisperse spherical particles. For conciseness, we shall restrict attention to thepractically relevant cases of rigid and liquid-like filler particles.
4.1. An isotropic iterative microstructure with infinitely polydisperse particles
We begin with the specialization of (56) to the iterative microstructure of Lopez-Pamies (2014), wherein the fillerparticles are infinitely polydisperse in size. In a recent contribution, Spinelli et al. (2015) worked out exact closed-formsolutions for the effective elastic dielectric tensors that characterize the response of dielectric elastomer composites withsuch iterative microstructures in the limit of small deformations and moderate electric fields. In its general form, theirsolution applies to anisotropic microstructures, as well as to compressible and anisotropic matrix and filler particle beha-viors. In the sequel, we invoke its specialization to the two cases of interest here: incompressible matrix materials andisotropic distributions of rigid and liquid-like particles.
Rigid particles: When specialized to incompressible dielectric elastomers with initial shear modulus μ0 and initial per-mittivity ε and to isotropic distributions of rigid particles with initial shear modulus μ =+∞p and initial permittivity ε0p, theresult of Spinelli et al. (2015) for the effective elastic dielectric coefficients (49) reduces to
μ μ μ ε εε ε
ε εε
εε ε ε ε
ε εε
= +( − )
= +( − )
( + ) + ( − )
= +( − )[( + ) + ( − ) ]
[( + ) + ( − ) ] ( )
∼∼
͠
cc
c
c c
mc c c
c c
52 1
,3
2 1,
3 23 7 7 1
10 2 1.
73K
0 0 0 00
0
0 0
02
p
p
0p p
p
It is trivial to deduce from (73)1 that the corresponding function r(c) defined by (65) is thus given by
( ) = +( − ) ( )
r cc
c
2 32 1
.742
Moreover, it is a simple matter to deduce that the finite branch of the effective free-energy function (66) for this class ofdielectric elastomer composites specializes to
( )( ) Ψ ε ε= ( − ) +( − )
− + − + +−
−( )
∼͠ ͠⎛⎝⎜
⎡⎣ ⎤⎦⎞⎠⎟W c c
c
cI c
c mI
mIF E, , 1
2 32 1
3 32 2 2
,75
K E K E2 1 5
HJ 05HJ 0
4 5r rp 0 0
where ε∼0 and m͠K0 are given by expressions (73)2,3,
ε ε ε
ε ε
ε ε ε
ε ε=
( − )( − )
[( + ) + ( − ) ]+
[( + ) + ( − ) ]
[( + ) + ( − ) ] ( )
c
c cI
c c
c cI
27 1
5 2 1
9 13 2 2 1
5 2 1,
76
E E5HJ 0
2
03 4
02
03 5
r p
p
p
p
and the variable ε0p is defined as the solution of the nonlinear algebraic equation
( ) ε′ − = ( )2 0, 775HJ0
r p
which, in general, for most choices of the function , needs to be solved numerically.The effective free-energy function (75) contains several limiting cases of practical significance. Here, we report the case
corresponding to filler particles that, in addition to being infinitely stiff, are electrically conducting so that the function
( ) =I 0E5 if =I 0E5 and ( )=+∞IE5 otherwise. For such a limiting case, the solution of Eq. (77) can be shown to be given byε =+∞0p and the effective free-energy function (75) simplifies to the following fully explicit expression:
( ) Ψ ε ε= ( − ) +( − )
− + −( − )
− ( + )( − ) ( )
⎛⎝⎜
⎡⎣ ⎤⎦⎞⎠⎟W c c
c
cI
cc
Icc
IF E, , 12 3
2 13 3
920 1
10 1120 1
.78
E E2 1 4 5
The result (78) is relevant for dielectric elastomer composites wherein the filler particles are hard (semi-)conductingpolymers (e.g., PANI and O-CuPc) or metals.
Liquid-like particles: When specialized to incompressible dielectric elastomers with initial shear modulus μ0 and initialpermittivity ε and to isotropic distributions of liquid-like particles with initial shear modulus μ = 0p and initial permittivityε0p, the result of Spinelli et al. (2015) for the effective elastic dielectric coefficients (49) reduces to
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 451
μ μ μ ε εε ε
ε εε
εε ε ε ε
ε εε
= −+
= +( − )
( + ) + ( − )
= +( − )[( + + ) + ( − )( + ) ]
( + )[( + ) + ( − ) ] ( )
∼∼
͠
cc
c
c c
mc c c c c
c c c
53 2
,3
2 1,
3 42 26 7 1 3 7
5 3 2 2 1.
79K
0 0 0 00
0
02
0
02
p
p
0p p
p
The corresponding function l(c) defined by (69) is given by
( ) =+ ( )
l cc
33 2
.80
In view of the above expressions, the finite branch of the effective free-energy function (70) for this class of dielectricelastomer composites reduces to
( )( ) Ψ ε ε= ( − ) + − + − + +−
−( )
∼͠ ͠⎛⎝⎜
⎡⎣ ⎤⎦⎞⎠⎟W c c c I c
c mI
mIF E, , 1
33 2
3 32 2 2
,81
K E K E1 5
HJ 05HJ 0
4 5l lp 0 0
where ε∼0 and m͠K0 are given by expressions (79)2,3,
ε ε ε
ε ε
ε ε ε
ε ε=
( − )( + )( − )
( + )[( + ) + ( − ) ]+
[( + + ) − ( − )( − ) ]
( + )[( + ) + ( − ) ] ( )
c c
c c cI
c c c c
c c cI
54 1 4
5 3 2 2 1
9 54 17 4 1 9 4
5 3 2 2 1,
82
E E5HJ 0
2
03 4
20
2
03 5
l p
p
p
p
and ε0p is defined implicitly by the nonlinear algebraic equation
( ) ε′ − = ( )2 0, 835HJ0
l p
which, similar to (77), for most choices of the function , needs to be solved numerically.For the limiting case when the particles, in addition to being of vanishingly small shear resistance, are electrically
conducting, the solution of Eq. (83) can be shown to be given by ε =+∞0p and the effective free-energy function (81) reducesto
( ) Ψ ε ε= ( − ) + − + −( + )
( − − )− ( + + )
( − − ) ( )
⎛⎝⎜⎜ ⎡⎣ ⎤⎦
⎞⎠⎟⎟W c c c I
c c
c cI
c c
c cIF E, , 1
33 2
3 39 4
10 3 215 4 1110 3 2
.84
E E1 2 4
2
2 5
The simple and fully explicit result (84) is relevant for dielectric elastomer composites wherein the filler particles areconducting liquids (e.g., Galinstan).
4.2. An isotropic distribution of monodisperse spherical particles
Complementary to the foregoing results, in this subsection we present the specialization of the effective free energy (56)to an isotropic distribution of monodisperse spherical particles.
Now, for an isotropic distribution of monodisperse spherical particles, the pdes (50) and (51) do not admit an analyticalsolution. As discussed in Appendix A of Spinelli et al. (2015), however, they can be readily solved numerically by means offinite elements (FE). This in turn allows for the numerical evaluation of the effective coefficients (49) required in thecomputation of the effective free energy (56). In general, since the derivatives μ μ∂ ∂∼ /0 0, μ∂ ∂m͠ /K 00 , ε ε∂ ∂
∼ /0 0p, ε∂ ∂m͠ /K 00 p of theeffective coefficients (49) are also needed in the computation of (56), the pdes (50) and (51) need to be solved multipletimes for a sufficiently wide range of values μ > 00 and ε ε≥0 0p to make possible the numerical computation of thesederivatives. For the two specific cases of interest here when the filler particles are either rigid or liquid-like, the pde (50)needs to be solved only once since it is independent of μ0 (see remarks v and vi above) and only the pde (51) needs to besolved multiple times for a sufficiently wide range of values ε ε≥0 0p . For these two cases, moreover, it is possible to obtainfrom the FE solutions simple explicit interpolating formulas for the effective elastic dielectric coefficients (49) over a largerange of volume fractions of particles c. In the sequel, we report such formulas for the practically relevant range ∈ [ ]c 0, 0.25 .These interpolating formulas are selected so that they are asymptotically exact to ( )O c2 in the dilute limit of particles as
→ +c 0 .Rigid particles: For incompressible dielectric elastomers, with initial shear modulus μ0 and initial permittivity ε, and rigid
spherical particles, with initial shear modulus μ =+∞p and initial permittivity ε0p, the FE solutions for the effective elasticdielectric coefficients (49) are accurately described for the range of volume fraction of particles ∈ [ ]c 0, 0.25 by the followingexplicit formulas:
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470452
μμ
ε εε ε εε ε
εε ε ε ε ε
ε ε
=( − )
= +( − )
( + ) + ( − )
= +( − )[( + + ) + ( − )( + ) ]
[( + ) + ( − ) ] ( )
∼∼
͠
c
c
c c
mc c c c c
c c
1,
3
2 1,
3 10 2 3 1 5 3
5 2 1.
85K
00
5/2 00
0
02
0
02
p
p
0p p
p
The corresponding function r(c) defined by (65) is given by
( ) =( − ) ( )
r cc
1
1.
867/2
In view of relations (85)–(86), the finite branch of the effective free-energy function (66) for this class of dielectric elastomercomposites specializes to
( )( ) Ψ ε ε= ( − ) −( − )
+ − + +−
−( )
∼͠ ͠⎛⎝⎜⎜
⎞⎠⎟⎟W c c I
cc
c mI
mIF E, , 1
3
13
2 2 2,
87
K E K E17/2 5
Sph 05Sph 0
4 5r rp 0 0
where ε∼0 and m͠K0 are given by expressions (85)2,3,
ε ε ε
ε ε
ε ε ε
ε ε= −
( − )( − )
[( + ) + ( − ) ]+
[( − + ) + ( + − ) ]
[( + ) + ( − ) ] ( )
c c
c cI
c c c c
c cI
54 1
5 2 1
9 10 6 5 6
5 2 1,
88
E E5Sph 0
2
03 4
2 20
2
03 5
r p
p
p
p
and the variable ε0p is defined implicitly by the nonlinear algebraic equation
( ) ε′ − = ( )2 0. 895Sph0
r p
For the limiting case when the particles are electrically conducting, Eq. (89) admits the explicit solution ε =+∞0p and theeffective free-energy function (87) reduces to
( ) Ψ ε ε= ( − ) −( − )
+ +( − )
− ( + + )( − ) ( )
⎛⎝⎜⎜
⎞⎠⎟⎟W c c I
c
cc
Ic c
cIF E, , 1
3
13
910 1
5 10 910 1
.90
E E17/2
2
4
2
5
Again, much like the effective free-energy function (78), the fully explicit effective free-energy function (90) is relevant fordielectric elastomer composites wherein the filler particles are hard (semi-)conducting materials.
Liquid-like particles: For incompressible dielectric elastomers, with initial shear modulus μ0 and initial permittivity ε, andliquid-like spherical particles, with initial shear modulus μ = 0p and initial permittivity ε0p, the FE solutions for the effectiveelastic dielectric coefficients (49) are accurately described for the range of volume fraction of particles ∈ [ ]c 0, 0.25 by thefollowing formulas:
μ μ ε εε ε εε ε
εε ε ε
ε εε
ε ε
= ( − ) = +( − )
( + ) + ( − )
= +( − )
[( + ) + ( − ) ]− +
− ( )
∼∼
͠⎛⎝⎜⎜
⎞⎠⎟⎟
cc
c c
mc c
c c c
1 ,3
2 1,
9
2 1445
81500
.91
K
05/3
0 00
0
02
02
2 61/25
0
p
p
0p
p p
The corresponding function l(c) defined by (69) is given by
( ) = ( − ) ( )l c c1 . 922/3
It follows from expressions (91)–(92) that the finite branch of the effective free-energy function (70) for this class of di-electric elastomer composites reduces to
( ) ( )( ) Ψ ε ε= ( − ) ( − ) − + − + + − − ( )∼͠ ͠⎡⎣ ⎤⎦W c c c I c
c mI
mIF E, , 1 1 3 3
2 2 2, 93
K E K E2/31 5
Sph 05Sph 0
4 5l lp 0 0
where ε∼0 and m͠K0 are given by expressions (91)2,3,
ε ε ε
ε ε
ε ε ε ε
ε ε=
( − + )( − )
[( + ) + ( − ) ]−
[( − + )( − ) − ]
[( + ) + ( − ) ] ( )
c c
c cI
c c
c cI
3 1500 1900 729
250 2 1
3 750 1150 729 2250
250 2 1,
94
E E5Sph
36/250
2
03 4
36/250
2
03 5
l p
p
p
p
and ε0p is implicitly defined by the nonlinear algebraic equation
( ) ε′ − = ( )2 0. 955Sph0
l p
For the limiting case when the particles, in addition to being of vanishingly small shear resistance, are electrically
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 453
conducting, the solution of Eq. (95) is simply given by ε =+∞0p and the effective free-energy function (93) simplifies to
( )( ) Ψ εε
= ( − ) ( − ) − + − ( − + )( − )
− ( − + − )( − ) ( )
⎡⎣ ⎤⎦W c c c I c c cc
I
c c c
cI
F E, , 1 1 3 31500 1900 729
1000 1
500 1000 900 7291000 1
.96
E
E
2/31
36/25
2 4
2 61/25
2 5
Akin to the effective free-energy function (84), the fully explicit effective free-energy function (96) is relevant for dielectricelastomer composites wherein the fillers are conducting liquids.
4.3. Electrostriction
We conclude this section by spelling out the response predicted by the effective free-energy function (56) for the ex-perimentally prominent boundary conditions of uniaxial electrostriction when the macroscopic first Piola–Kirchhoff stress Sand macroscopic electric field E are of the form
= =( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎡
⎣⎢⎢
⎤
⎦⎥⎥S E
E
0 0 00 0 00 0 0
,00 ;
97ij i
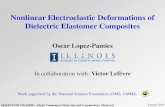
the components of all tensorial quantities throughout this subsection are referred to the Cartesian laboratory axes e e e, ,1 2 3depicted in Fig. 1. It follows from the constitutive relations (59) and (60) that
λλ
λ
= =
( )
−
−
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
F D
D
0 0
0 00 0
and00 ,
98
ij i
1/2
1/2
where the electrostriction stretch λ in the direction of the applied electric field (see Fig. 1) and the non-trivial component Dof the electric displacement field are defined by the relations
λ λμ
ελ
− + = = − −( )
∼∼͠
͠⎡⎣⎢
⎛⎝⎜
⎞⎠⎟
⎤⎦⎥
mE D m E0 and 1
1
99K
K4
0
20 2
00
in terms of the applied electric field E . Here, we stress yet again that the coefficients μ∼0, ε∼0, m͠K0 in (99) are ultimatelyfunctions of the microstructure through the indicator function θ ( )X , of the properties of the dielectric elastomeric matrixthrough the functionΨ and initial permittivity ε, of the properties of the filler particles through the initial shear modulus μp
Fig. 1. Schematic of the typical experimental setup, in (left) the undeformed and (right) the deformed configurations, to probe the electrostriction ofdielectric elastomers under the application of an uniaxial Lagrangian electric field Φ= −E L/ 3.
and function , and of the macroscopic deformation gradient F and electric field E, in this case, through the electrostrictionstretch λ and uniaxial component E .
4.3.1. The case of an isotropic distribution of monodisperse spherical particlesFor demonstration purposes and later use in Section 6, we spell out next the specialization of the general results (99) to
the case discussed in Section 4.2 when the microstructure consists of an isotropic distribution of monodisperse sphericalparticles that are either rigid or liquid-like.
Rigid particles: For the case of rigid spherical particles, the coefficients μ∼0, ε∼0, m͠K0 are given by expressions (85) so thatrelations (99) defining the electrostriction stretch λ and electric displacement D specialize to
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470454
λ λ
ε ε εε ε
ε ε
ε ε
Ψ λ λ− +
( − ) ( − )( − )
+( + + ) + ( − )( + )
[( + ) + ( − ) ]
′ + −( − )
+=
( )
−
⎡⎣⎢⎢
⎤⎦⎥⎥
⎛⎝⎜⎜
⎞⎠⎟⎟
c cc
c c c c
c c
c
E
3 11
3
10 2 3 1 5 3
5 2 1
22 3
13
0
100
4
5/20
0
20
02
2 1
7/2
2p
p
p
p
and
εε ε
ε ελ ε ε
ε ε λ λ=
( − )( + ) + ( − )
+( − )[( + + ) + ( − )( + ) ]
[( + ) + ( − ) ]+
( )
⎡
⎣⎢⎢
⎛⎝⎜⎜
⎞⎠⎟⎟
⎤
⎦⎥⎥D
c
c c
c c c c
c cE
3
2 11
1 10 2 3 1 5 3
5 2 11
,101
0
0
2 20
02 2
p
p
p
p
where ε0p is solution of the nonlinear algebraic equation
( ) ε′ − = ( )2 0 1025Sph0
r p
with
ε ε ε
ε ε
ε ε ε
ε ε λ= −
( − )( − )
[( + ) + ( − ) ]+
[( − + ) + ( + − ) ]
[( + ) + ( − ) ] ( )
c c
c cE
c c c c
c c
E54 1
5 2 1
9 10 6 5 6
5 2 1.
1035Sph 0
2
03
22 2
02
03
2
2r p
p
p
p
If, in addition to being rigid, the particles are electrically conducting, the results (100)–(101) reduce to
λ λ ε
Ψ λ λ− + ( − ) ( + + )
′ + −( − )
+=
( )
−⎛⎝⎜⎜
⎞⎠⎟⎟
c c c
c
E1 5 10 9
102 3
13
0
104
43/2 2
2 1
7/2
2
and
λ ελ
= [ + + ( − )]( − ) ( )
Dc c
cE
5 10 9 15 1
.105
2 2
2
Liquid-like particles: For the case of liquid-like spherical particles, the coefficients μ∼0, ε∼0, m͠K0 are given by expressions (91)so that relations (99) defining the electrostriction stretch λ and electric displacement D take the form
( )λ λε
ε ε ε
ε εε
ε ε
Ψ λ λ− +
+( − )
[( + ) + ( − ) ]− +
−
( − ) ′ ( − ) [ + − ] +=
( )−
⎛⎝⎜⎜
⎞⎠⎟⎟c c
c c c
c cE
9
2 1445
81500
2 1 1 2 3 30
106
4
02
02
2 61/25
0
5/3 2/3 2 1
2
p
p p
and
εε ε
ε ελ ε ε
ε ε λ λ=
( − )( + ) + ( − )
+( − )[( − + ) + ( − ) ]
[( + ) + ( − ) ]+
( )
⎡
⎣⎢⎢
⎛
⎝⎜⎜
⎞
⎠⎟⎟
⎤
⎦⎥⎥D
c
c c
c c c c
c cE
3
2 11
1 4500 400 729 400 729
1500 2 11
,107
0
0
2 36/25 11/250
02 2
p
p
p
p
where ε0p is implicitly defined by the nonlinear algebraic equation
( ) ε′ − = ( )2 0 1085Sph0
l p
with
ε ε ε
ε ε
ε ε ε ε
ε ε λ=
( − + )( − )
[( + ) + ( − ) ]−
[( − + )( − ) − ]
[( + ) + ( − ) ] ( )
c c
c cE
c c
c c
E3 1500 1900 729
250 2 1
3 750 1150 729 2250
250 2 1.
1095Sph
36/250
2
03
236/25
02
03
2
2l p
p
p
p
If, in addition to exhibiting a vanishingly small shear resistance, the particles are electrically conducting, the results (106)–(107) specialize further to
( )λ λε
Ψ λ λ− + ( − + − )
( − ) ′ ( − ) [ + − ] +=
( )−
c c c
c cE
500 1000 900 729
1000 1 1 2 3 30
110
42 61/25
11/3 2/3 2 1
2
and
-
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470 455
λ λ λ ελ
= [ − ( − ) − ( − ) + ( − )]( − ) ( )
Dc c c
cE
500 729 1 500 2 3 100 9 19500 1
.111
61/25 2 2 2 2
2 2
5. A hybrid FE formulation for homogenization problems in nonlinear electroelastostatics
Complementary to the analytical framework put forth in the two preceding sections, we present in this section a hybrid FEformulation to construct homogenization solutions numerically for the macroscopic elastic dielectric response of dielectric elas-tomer composites subjected to finite deformations and finite electric fields. Non-hybrid FE formulations for this class of problemsappear to have been first reported by Li and Landis (2012) and by Keip et al. (2014) in the context of two spatial dimensions, whilenon-hybrid FE formulations in three dimensions have been just recently reported by Miehe et al. (2016). These works also includesample solutions for square/cubic distributions of elliptical/ellipsoidal distributions of filler particles in compressible ideal elasticdielectric matrix materials under conditions of uniaxial electrostriction. Because of the well-known issue of volumetric locking, theabove referenced non-hybrid formulations are not applicable to study incompressible or nearly incompressible dielectric elastomercomposites, which are the case of most practical relevance and of interest here.
For definiteness, we restrict attention to dielectric elastomer composites of infinite extent whose initial microstructures aredefined by the periodic repetition of a cubic unit cell, = { ∈ [ ] }Y X X: 0, 1 3 say, containing a finite, possibly large, number of fillerparticles. The hybrid FE formulation that we pursue here stems from the definitions of a function ( )W JX F E, , , that agreesidentically with the local free-energy function ( )W X F E, , when =J Fdet and of its transform (see, e.g., Chi et al., 2014)
{ }*( ) ≐ ( − ) − ( ) ( )W p p J W JX F E X F E, , , max 1 , , , . 112JProvided that W is convex in its argument J, the duality relation
{ }( ) = ( − ) − *( ) ( )W J p J W pX F E X F E, , , max 1 , , , 113pfollows from (112). Direct use of (113) and restricting attention to Y-periodic solutions3 allows one to rewrite the variationalproblem (4) in the alternative form
{ }∫( ) Φ= [ ( ) − ] − *( ( ) ( )) ( )Φ∈ ∈ ∈W c p W pF E F u X F u E X, , min max max det 1 , , , d , 114p Yuwhere the displacement vector field = −u x X and the electric potential scalar field Φ, both free of any differential constraint, areconveniently chosen as the independent arguments in lieu of the deformation gradient F and the curl-free Lagrangian electric fieldE. For clarity, we write the dependence of δ( ) = +F u uij i ij i j, and Φ Φ( ) = −Ei i, on u and Φ explicitly. In the hybrid variationalprinciple (114), , , and stand for sufficiently large sets of admissible displacements u, admissible electric potentials Φ, andadmissible pressure fields p that are consistent with the following periodicity conditions:
Φ Φ Φ Φ
( ) = ( − ) + ( ) − ( ) =
( ) = − · + ( ) − ( ) =
− ( )
͠ ͠ ͠
∼ ∼ ∼Y
Y
p Y
u X F I X u X u u 0 0
X E X X 0
, where is periodic, ,
, where is periodic, 0,
is periodic. 115
The weak form of the Euler–Lagrange equations associated with the variational principle (114) reads as
∫
∫
∫
( ) Φ
Φ ψ ψ
Φ
( ) ( ) − ∂*
∂( ( ) ( )) = ∀ ∈
∂ *
∂( ( ) ( )) = ∀ ∈
( ) − − ∂*
∂( ( ) ( )) = ∀ ∈
( )
−⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎧⎨⎩
⎫⎬⎭
⎧⎨⎩
⎫⎬⎭
⎧⎨⎩
⎫⎬⎭
p FWF
p v
WE
p
Wp
p q q
F u u X F u E X v
X F u E X
F u X F u E X
det , , , d 0 ,
, , , d 0 ,
det 1 , , , d 0 ,116
Yji
iji j
Y ii
Y
1,
0
,0
where 0 and 0 stand for sufficiently large spaces of vector fields v and scalar fields ψ that are Y-periodic and satisfy( ) =v 0 0 and ψ ( ) =0 0.A convenient yet robust method, which we pursue here, to construct numerical solutions for the type of Euler–Lagrange
equation (116) is the conforming FE method. This requires the selection of suitable finite dimensional subspaces of , , and. The details of the construction of such subspaces and of the FE solutions for the Euler–Lagrange equation (116) that they
3 Periodic solutions of larger period than the unit cell Y may exist. These are associated with the development of microscopic instabilities (see, e.g.,Geymonat et al., 1993; Michel et al., 2010). We shall not consider such solutions in this work.
-
Fig. 2. Meshes for unit cells Y containing: (a) N¼36 randomly distributed spherical particles of three different sizes with ≈N 150, 000e elements( ≈N 670, 000n nodes) and (b) N¼30 randomly distributed spherical particles of identical size with ≈N 80, 000e elements ( ≈N 345, 000n nodes). Thevolume fraction of particles in both meshes is c¼0.15.
V. Lefèvre, O. Lopez-Pamies / J. Mech. Phys. Solids 99 (2017) 438–470456
allow to generate are provided in the Appendix.
5.1. Application to non-Gaussian dielectric elastomers isotropically filled with nonlinear elastic dielectric particles
The hybrid FE formulation presented in the Appendix is applicable to arbitrary types — in terms of local elastic dielectricbehaviors as well as microstructures — of dielectric elastomer composites. The interest of this work is in non-Gaussiandielectric elastomers, characterized by free-energy functions of the form (10), isotropically filled with nonlinear elasticdielectric particles characterized by free-energy functions of the form (14). For this class of dielectric elastomer composites,the transform function *( )W pX F E, , , required in the hybrid variational principle (114) is simply given by
θ θ*( ) = [ − ( )] * ( ) + ( ) *( ) ( )W p W p W pX F E X F E X F E, , , 1 , , , , 117m p
with
( )Ψ ε μ* ( ) = − ( ) + *( ) = − [ − ] + ( )W p I I W p I IF E F E, , 2 and , , 2 3 , 118E E
m 1 5 pp
1 5
this for any isotropic indicator function θ of choice.Now, by definition, an isotropic distribution of particles involves an infinite number of particles. Within the present context,
however, it suffices to consider a large but finite number of particles randomly distributed in the repeating unit cell Y. In this paper,we follow this approach to work out FE results for two types of microstructures: (i) an isotropic distribution of polydispersespherical particles of a finite number of different sizes and (ii) an isotropic distribution of monodisperse spherical particles, asdescribed in Sections 4.1 and 4.2 of Part I. Representative meshes for two realizations of suchmicrostructures are shown in Fig. 2 fora composite where the volume fraction of particles is c¼0.15. Mesh sensitivity analyses have indicated that meshes comprising
≈N 150, 000e elements ( ≈N 670, 000n nodes) for the polydisperse microstructure and ≈N 80, 000e elements ( ≈N 345, 000nnodes) for the monodisperse microstructure are refined enough to deliver accurate results, at least for the range of volume fractionof particles considered in this work, ∈ [ ]c 0, 0.25 . Finally, we note that all the FE results presented throughout this work correspondto the average of three realizations (see Sections 4.1 and 4.2 of Part I). The responses of all three realizations exhibited very smalldifferences (less than 1%) between one another. All the FE results are presented up to the point at which we were able to computethem.
6. Sample results
Next, we present sample results for the macroscopic electromechanical behaviors of a typical non-Gaussian dielectricelastomer filled with several physically significant types of nonlinear elastic dielectric filler particles, as characterized by theanalytical variational solution (56) and by the hybrid FE formulation of Section 5. Throughout this section, for definiteness,we make use of the choice (12) for the function Ψ ( )I1 described in Section 2.1, so that
αμ
αμ ε( ) = [ − ] + [ − ] − =
+ ∞ ( )
αα α
αα α
− −⎧⎨⎪
⎩⎪W
I I IF E
F,
32
332
32
if det 1
otherwise, 119
E
m
1
11 1
1
22 1 5
11 1
22 2
with the material parameters listed in Table 1. This choice of free-energy function provides an accurate model for a standardsilicone elastomer over large ranges of deformations and electric fields; see Section 2.3 in Lopez-Pamies (2010) and Liu et al. (2013).
-
Table 1Values for the material parameters α1, μ1, α2, μ2, ε in the free-energy function (119) fitted to model a silicone elastomer.
α1 μ1 (MPa) α2 μ2 (MPa) ε (F/m)
Silicone elastomer 3.837 0.032 0.559 0.3 ε3.2 0
Table 2Values for the material parameters μp, εp, ps in the free-energy function (120) utilized to model rigid conducting particles, rigid high-permittivity particleswith polarization saturation, and liquid-like high-permittivity particles.
μp (MPa) εp (F/m) ps (C/m2)
Rigid conducting particles +∞ +∞ +∞Rigid high-permittivity particles
with polarization saturation+∞ ε320 0 10
�2, 10�4
Liquid-






![Nonlinear Electroelastic Deformations · the theoretical foundations of electromagnetic continua within a flnite defor- ... and Kovetz [10] and references ... as in elasticity theory,](https://static.fdocuments.us/doc/165x107/5b92154209d3f274268d3c01/nonlinear-electroelastic-deformations-the-theoretical-foundations-of-electromagnetic.jpg)