Nong Lam University - Website cá nhân giáo viên - cán ... · Nong Lam University. 06/10/2012 2...
43
06/10/2012 1 Master PHUC NGUYEN [email protected] Christian ANTOINE [email protected] Sébastien HENRY [email protected] Industrial Robotic Nong Lam University
Transcript of Nong Lam University - Website cá nhân giáo viên - cán ... · Nong Lam University. 06/10/2012 2...

06/10/2012
1
Master PHUC [email protected]
Christian [email protected]
Sébastien [email protected]
Industrial Robotic
Nong Lam University

06/10/2012
2
1
Robot architecture
Arm position1) Join position.
2) Cartesian position.
Move the robot1) Join move.2) Cartesian move.
Robotics and Vision IndustrialRobotics and Vision IndustrialRobotics and Vision IndustrialRobotics and Vision Industrial

06/10/2012
3
2
Robot Architecture
Controler (CS8C)Arm
MCPManual Control PanelWMS
Working Mode Selection
Flange

06/10/2012
4
3
Robot Architecture
brushless motorwith position sensor
Hall-effect
ControlerArm
Control voltage
Hall voltage
Program

06/10/2012
5
4
ATTENTION - VERY DANGEROUS
06/10/2012
6
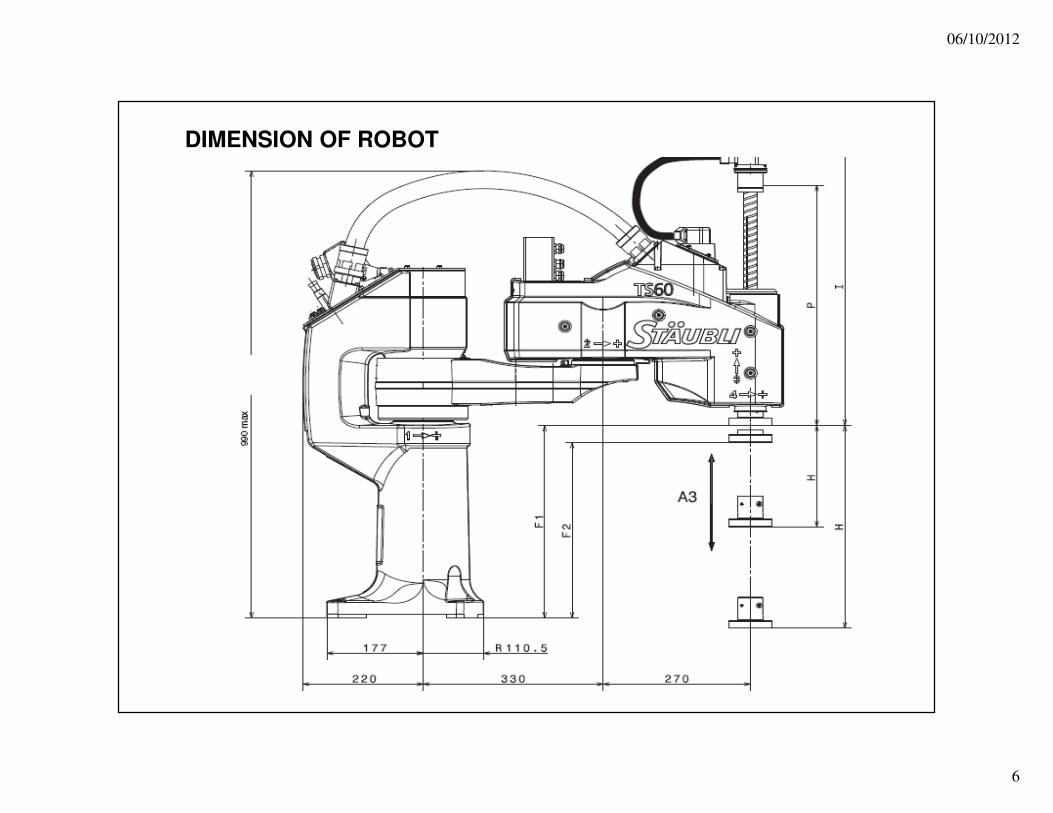
DIMENSION OF ROBOT

06/10/2012
7
DIMENSION OF ROBOT

06/10/2012
8
7
TS60 WORK AREA

06/10/2012
9
8
WORK SPACE OF TS 60

06/10/2012
10
9
SAFETY WORK-SPACE

06/10/2012
11
10
Arm position
ConversionHall voltage
Joint position
Axis 1, revolute axis, value of the angle of rotation of part B relative to part AAxis 2, revolute axis, value of the angle of rotation of part C relative to part BAxis 3, linear axis, value of linear position of part D relative to part CAxis 4, revolute axis, value of the angle of rotation of part D relative to part C
Joint positionθ1 θ2 d3 θ4
θ4
d3
θ2
θ1
A
BC
D

06/10/2012
12
11
Cartesian position
Calculation of the Cartesian position from the angular position
Data:
• Joint position (θ1 θ2 θ3 θ4 θ5 θ6)
• Geometry of the robot (dimension of part A, B, C, etc)
Only one solution !
Arm position- BÀI TOÁN ðỘNG HỌC
Conversion
Hal
l vol
tage
Joint Pos.θ1 …θ6 Calculation
RmF/RfW
Cartesian position RmB/RfW
6 components
geometric model
WFWFWFWFWFWF RzRyRxzyx ////// ,,,,,

06/10/2012
13
12
Arm position
Cartesian positions
Conversion
Hal
l vol
tage
Joint Pos.θ1 …θ6 Calcul
RmF/RfW
Cart. Pos.RmF/RfW
Geometric model
Frameschift
RmT: tool frame
Pos. Cart.RmT/RfW
Frameschift
Pos. Cart.RmT/RfU
RfU: user frame
Displayon MCP
Joint position
Defined by you !

06/10/2012
14
13
•THIẾT LẬP LẠI MA TRẬN DH CHO ROBOT SCARA TS60 3 bậc .
•TÍNH BÀI TOÁN ðỘNG HỌC THUẬN VỊ TRÍ CHO ROBOT.
•SO SÁNH K�T QU� TÍNH TOÁN V�I PH�N MÔ PH�NG 3D.
BÀI TẬP LỚN 1 – TÍNH TOÁN ðỘNG HỌC CHO ROBOT DỰA VÀO KÍCH THƯỚC CỦA ROBOT.
06/10/2012
15
14
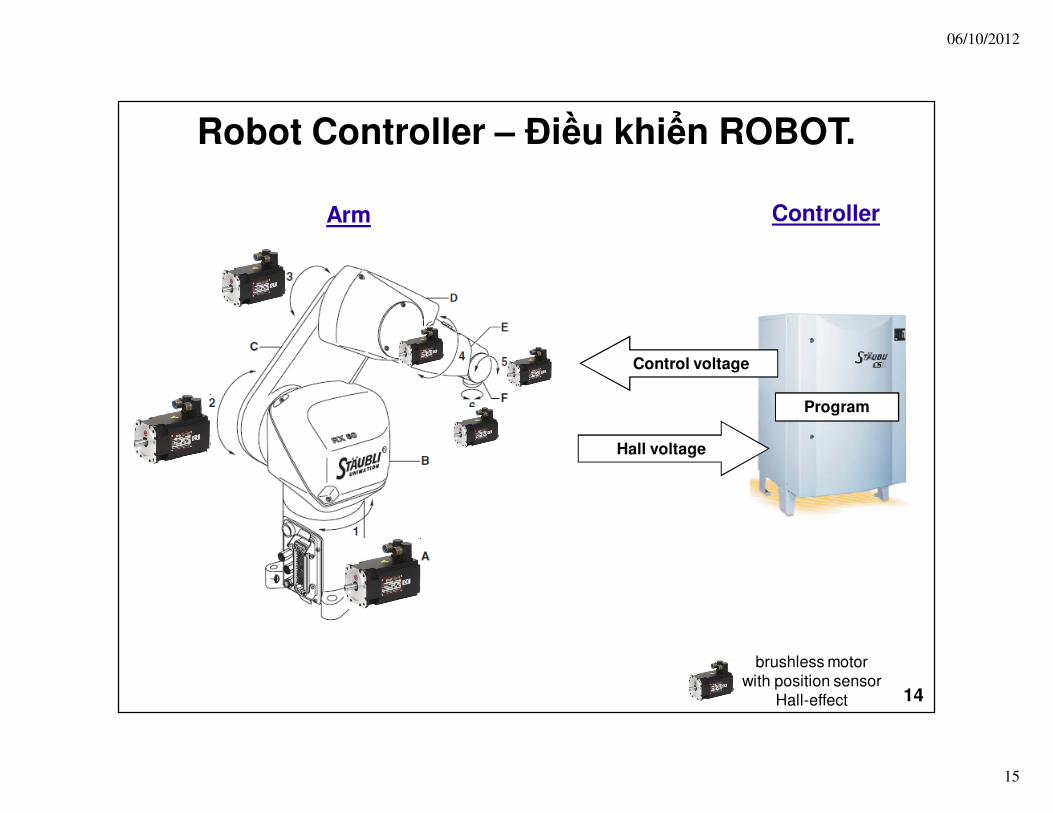
Robot Controller – ðiều khiển ROBOT.
ControllerArm
Control voltage
Hall voltage
Program
brushless motorwith position sensor
Hall-effect
06/10/2012
16
15
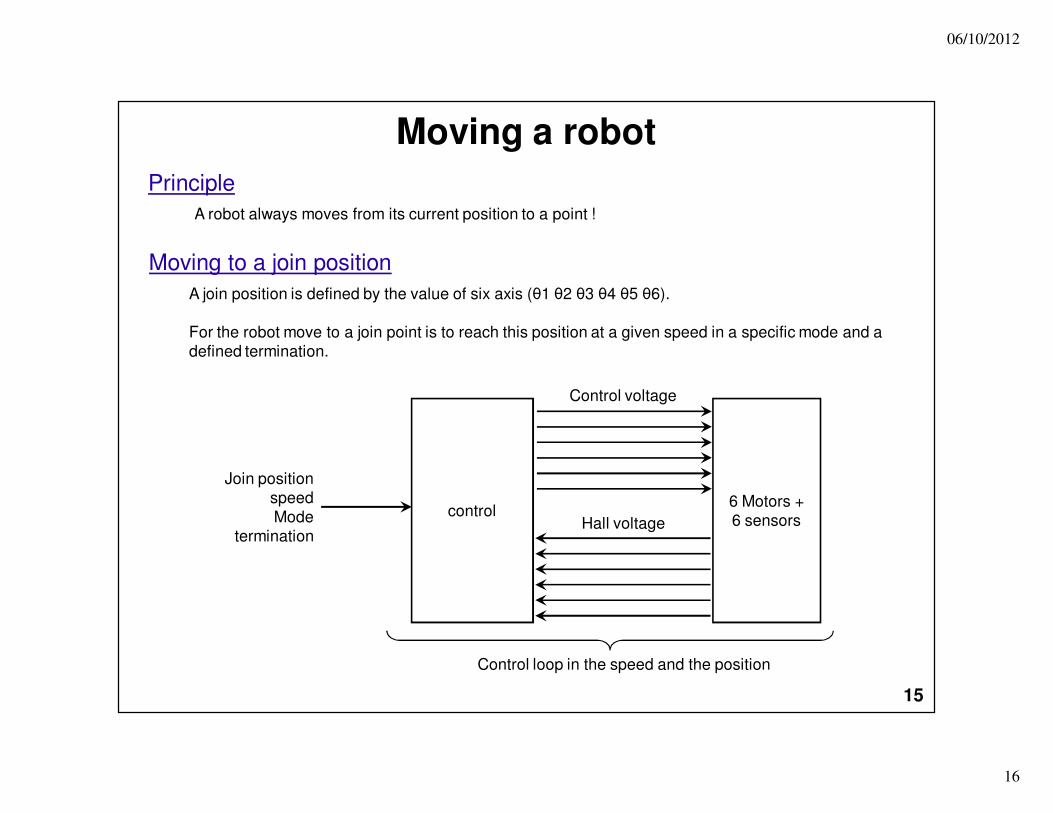
Moving a robotPrinciple
A robot always moves from its current position to a point !
Moving to a join positionA join position is defined by the value of six axis (θ1 θ2 θ3 θ4 θ5 θ6).
For the robot move to a join point is to reach this position at a given speed in a specific mode and a defined termination.
control
Control voltage
Join positionspeedMode
termination
6 Motors +6 sensorsHall voltage
Control loop in the speed and the position
06/10/2012
17
16
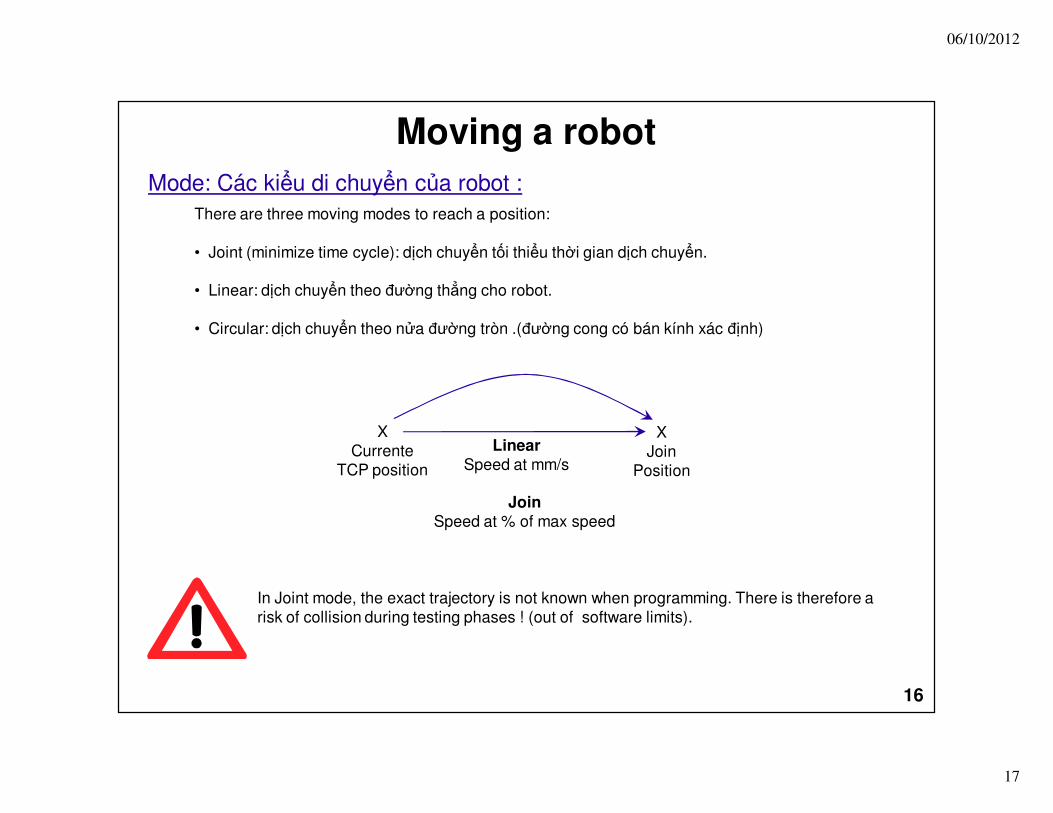
Moving a robotMode: Các kiểu di chuyển của robot :
There are three moving modes to reach a position:
• Joint (minimize time cycle): dịch chuyển tối thiểu thời gian dịch chuyển.
• Linear: dịch chuyển theo ñường thẳng cho robot.
• Circular: dịch chuyển theo nửa ñường tròn .(ñường cong có bán kính xác ñịnh)
XCurrente
TCP position
XJoin
Position
LinearSpeed at mm/s
JoinSpeed at % of max speed
In Joint mode, the exact trajectory is not known when programming. There is therefore a risk of collision during testing phases ! (out of software limits).
06/10/2012
18
17
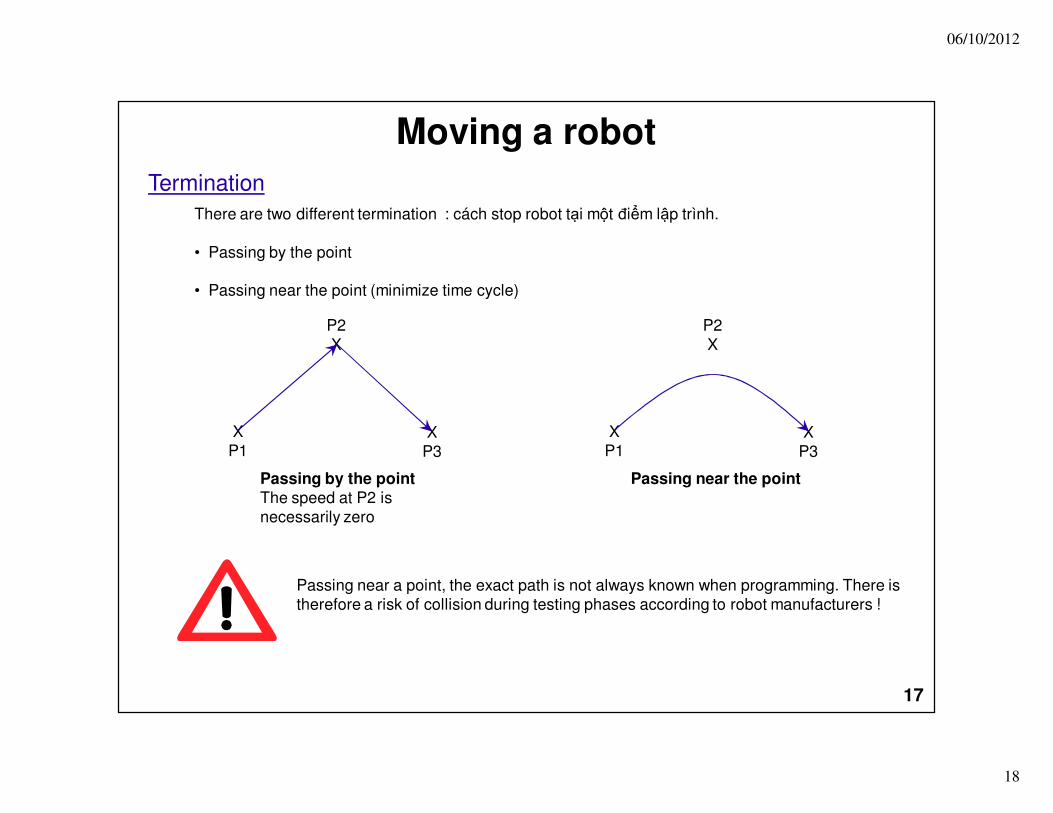
Moving a robotTermination
There are two different termination : cách stop robot tại một ñiểm lập trình.
• Passing by the point
• Passing near the point (minimize time cycle)
XP1
XP3
Passing near a point, the exact path is not always known when programming. There is therefore a risk of collision during testing phases according to robot manufacturers !
P2X
XP1
XP3
P2X
Passing by the pointThe speed at P2 is necessarily zero
Passing near the point

06/10/2012
19
18
Moving a robot
Configuration of 6 axis robot

06/10/2012
20
19
Moving a robot
Configuration of 4-axis robot
06/10/2012
21
20
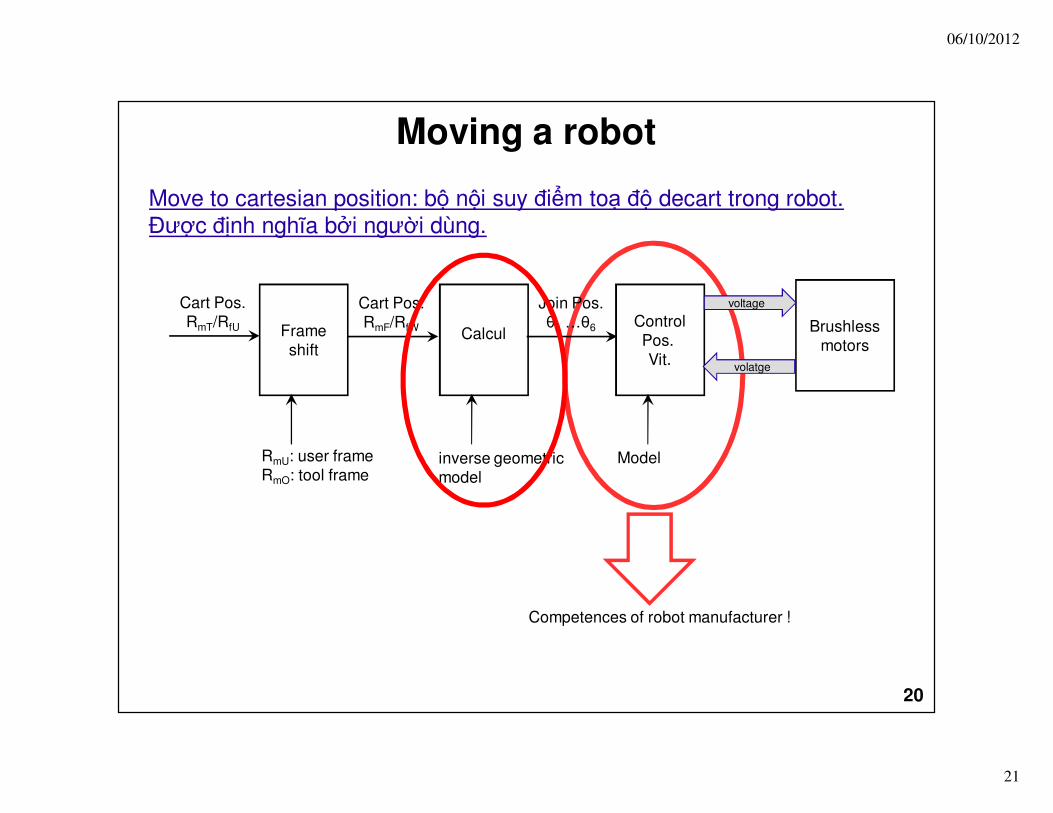
Moving a robot
Move to cartesian position: bộ nội suy ñiểm toạ ñộ decart trong robot.ðược ñịnh nghĩa bởi người dùng.
Competences of robot manufacturer !
Brushlessmotors
Join Pos.θ1 …θ6Frame
shift
Cart Pos.RmF/RfW
inverse geometricmodel
Calcul
RmU: user frameRmO: tool frame
ControlPos. Vit.
Cart Pos.RmT/RfU
Model
voltage
volatge

06/10/2012
22
21
Moving a robot
Controller
APPLICATION
TRANSFORMATION
Control
Interpretation of instructions
Calculation of axis angleFrame schift + inverse geometric model
Position and speed control

06/10/2012
23
22
STAUBLI SOFTWARE FOR SIMULATION OF ROBOT
Chạy chương trình : Start-> programs���� Staubli���� SRS����7.3���� staubli robot 7.3
Phần mềm quản lý ,mô phỏng , lập trình ứng dụng trước khi cho robot hoạt ñộng .
User of Robot

06/10/2012
24
23
CELL MANAGERS

06/10/2012
25
24
CELL MANAGERS

06/10/2012
26
25
VAL 3 STUDIO :

06/10/2012
27
26
VAL 3 STUDIO :

06/10/2012
28
27
Program here
VAL 3 STUDIO :

06/10/2012
29
28
EMULATOR CS8: BỘ ðiỀU KHIỂN GIẢ LẬP MCP

06/10/2012
30
29
TAB 3D STUDIO

06/10/2012
31
30
TRANSFER MANAGER

06/10/2012
32
31
REMOTE ACCESS

06/10/2012
33
32

06/10/2012
34
33
BEGIN OF APPLICATION.
Application 1: di chuyển nội suy ñến một ñiểm.Application 2: di chuyển tuyến tính ñến một ñiểm.Application 3: di chuyển theo cung tròn.Application 4: di chuyển kết hợp : thẳng và cung tròn.Application 5: Pick and Place object.Application 6: operator and robot.

06/10/2012
35
34
APPLICATION 1
DI CHUYỂN NỘI SUY ðẾN MỘT ðiỂM:
MOVEJ(pPot1, fVacumm,mNomSeed): với yêu cầu tối thiểu hoá thời gian di chuyển của
robot.
Movej(pPot1, Tool, Speed).:
Waitendmove().

06/10/2012
36
35
DI CHUYỂN THEO ðƯỜNG THẲNG:
MOVEL(pPOT1, Ftool, normspeed )
pPot1: x=0; y=0 ; z=5; rx=180;
ry=0; rz=103.
pPot2: x=0 ; y =100 ; z=5;
pPot3: x= -240 ; y=100 ; z=5;
pPot4: x= -240 ; y=0 ; z=5;movel(pPot1,Fvacuum,mLinear) : di
chuyen theo duong thang..
waitEndMove()
movel(pPot2,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot3,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot4,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot1,Fvacuum,mLinear)
waitEndMove()
APPLICATION 2

06/10/2012
37
36
Di CHUYỂN THEO CUNG TRÒN:
MOVEC(intermediat, destination, Normspeed).
movej(pPot1,Fvacuum,mNomSpeed)// di chuyen
den DIEM BẮT ðẦU VẼ...
waitEndMove()
movec(pPot2,pPot3,Fvacuum,mNomSpeed) // ve
từ bắt ñầu ñến ðIỂM TRUNG GIAN VÀ
ðIỂM KẾT THÚC....waitEndMove()
movej(pPot3,Fvacuum,mNomSpeed) // DIEM BAT
DAU VE....
waitEndMove()
movec(pPot4,pPot1,Fvacuum,mNomSpeed) //
DIEM TRUNG GIAN VA KET THUC....
waitEndMove()
APPLICATION 3

06/10/2012
38
37
APPLICATION 4
movej(pPot1,Fvacuum,mNomSpeed)
waitEndMove()
movel(pPot2,Fvacuum,mNomSpeed)
waitEndMove()
movec(pPot3,pPot4,Fvacuum,mNomSp
eed)
waitEndMove()
movel(pPot5,Fvacuum,mNomSpeed)
waitEndMove().
DI CHUYỂN KẾT HỢP TUYẾN TÍNH VÀ CUNG TRÒN – CHỮ U.

06/10/2012
39
38
APPLICATION 5: PICK AND PLACE OBJECT
Yêu cầu :
Tốc độ khi xuống gắp sản phẩm và nâng sản phẩm lên tương đối chậm , sau đó tốc độ di chuyển qua điểm để đặt chi tiết nhanh hơn , sau đó robot đặt chi tiết xuống và rút chi tiết lên với tốc độ chậm, sau đó robot quay trở lại điểm ban đầu với tốc độ nhanh .

06/10/2012
40
39
movej(pPot1,fVacuum,mNomSpeed)
waitEndMove()
movej(appro(pPot1,{0,0,70,0,0,0}),fVacuum,mPick)
waitEndMove()
movel(pPot1,fVacuum,mPick)
waitEndMove()
movej(pPot2,fVacuum,mNomSpeed)
waitEndMove()
movej(appro(pPot2,{0,0,70,0,0,0}),fVacuum,mNomSpeed)
waitEndMove()
movel(pPot2,fVacuum,mPick)
movel(pPot1,fVacuum,mNomSpeed)
waitEndMove()
CODE CHƯƠNG TRÌNH :

06/10/2012
41
40
BÀI TẬP LỚN SỐ 2 :
Hãy viết chương trình thể hiện robot di chuyển theo biên dạng sau : (các toạ ñộ ñiểm SV tự lựa chọn.)

06/10/2012
42
41
THE END OF THE COURSE ..

06/10/2012
43
42
Thank You For Attention.