No Slide Titleweb.eecs.utk.edu/~leparker/Courses/CS594-spring03/Lectures/Jan14.pdf · • Advances...
41
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 – 12:25 Instructor: Dr. Lynne E. Parker ½ TA: William Duncan http://www.cs.utk.edu/~parker/Courses/CS594-spring03
Transcript of No Slide Titleweb.eecs.utk.edu/~leparker/Courses/CS594-spring03/Lectures/Jan14.pdf · • Advances...

CS594, Section 30682:
Distributed Intelligence in Autonomous Robotics
Spring 2003Tuesday/Thursday 11:10 – 12:25
Instructor: Dr. Lynne E. Parker½ TA: William Duncan
http://www.cs.utk.edu/~parker/Courses/CS594-spring03

Outline
• Overview syllabus and class policies
• Overview of Distributed Robotics
• Introduction to topics to be studied this semester

Overview of Syllabus and Class Policies
(See handout)

Overview of Distributed Robotics

Research in Multi-Robot Systems: Growing Rapidly

How Rapidly is this Research Growing?
• To investigate, conducted an INSPEC* Search:– Yearly query, 1979 - 2001
– Searched for articles including at least one of the following terms:• Multi-robot• Multirobot• Cooperative robot• Collaborative robot• Distributed robot
* Citation index for physics, electronics, and computing

Results of INSPEC Search Show Enormous Growth in Multi-Robot Systems Research
# Arti
cles i
n IN
SPEC
0
50
100
150
200
250
300
350
1975 1980 1985 1990 1995 2000 2005

What are Reasons for Enormous Growth?
• Advances in individual autonomous robotics
• Advances in understanding of complex systems
• Increased computational capabilities
• Many potential application domains
• RoboCup influence
• Etc...

Many Potential Application Domains for Multi-Robot Teams
NASA: Space explorationSpace Exploration
Industry: Mining, construction, ...Mining
Military: Surveillanceand reconnaissanceSurveillance and Reconnaissance
U.S. Department of Energy: Hazardous site cleanupHazardous Waste Cleanup

Eight Primary Areas of Research in Distributed Robotics
1. Biological Inspirations2. Motion Coordination3. Communication4. Object Transport and Manipulation 5. Reconfigurable Robotics6. Architectures, Task Planning, and Control7. Localization, Mapping, and Exploration8. Learning
For each area: For each area: •• Different extents of studyDifferent extents of study•• Many excellent solutionsMany excellent solutions•• Open research issues remain in all areasOpen research issues remain in all areas

Relative Concentration in Each Area of Multi-Robot Systems
0
50
100
150
200
250
300
350
400
450
500
1 2 3 4 5 6 7 8Biological Inspirations
Motion planningCommunicationManipulationReconfigurable robots
Architectures, etc.
Localization, etc.
Learning
# Arti
cles i
n IN
SPEC
(Values based uponINSPEC search for years 1979 - 2001)

1. Biological Inspirations
Objective: Study biological systems to achieve engineering goals
• Communication– Auditory, chemical, tactile, visual, electrical– Direct, indirect, explicit, implicit
• Roles– Strict division vs. loose “assignments”
• Hierarchies– Absolute linear ordering, partial ordering, relative ordering– Purpose: reduction in fighting, efficiency
• Territoriality– Reduces fighting, disperses group, simplifies
interactions• Social facilitation/sympathetic induction
– Allows for efficient use of resources• Imitation
– Complex mechanism for learning
Leaf cutter ants
Bee colony

Example MovieSwarm-type dispersion: Andrew Howard, Univ. of Southern California

Biological Inspirations: Future Directions
HighHigh--impact, open research issues: impact, open research issues:
•• Can we actually demonstrate large numbers of physical Can we actually demonstrate large numbers of physical robots (>=100) working together?robots (>=100) working together?
•• How do we use autonomous, dynamic physical How do we use autonomous, dynamic physical interconnectivity (like insects) to enable collective interconnectivity (like insects) to enable collective navigation over challenging terrains?navigation over challenging terrains?
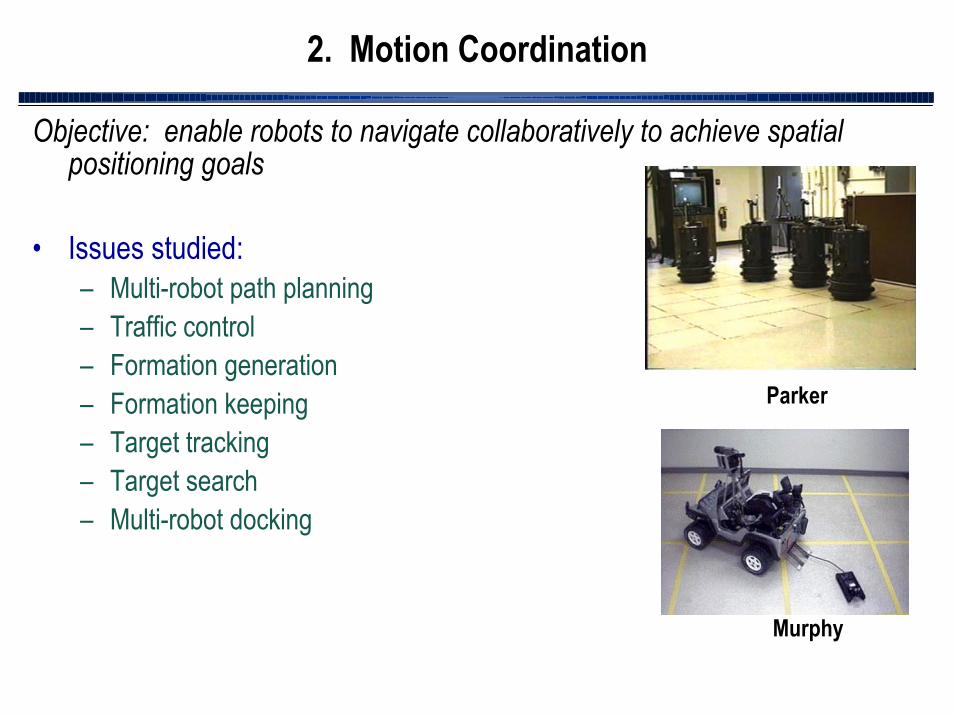
2. Motion Coordination
Objective: enable robots to navigate collaboratively to achieve spatial positioning goals
• Issues studied:– Multi-robot path planning– Traffic control– Formation generation– Formation keeping– Target tracking– Target search– Multi-robot docking
Parker
Murphy

Multi-Robot Motion Control: Keeping-Formation
Our research has led to new insights into achieving global control via local interactions: fundamental limitations in small team members achieving globally optimal solutions with limited global knowledge.
L. E. Parker, “Designing control laws for cooperative agent teams”, Proc. of IEEE International Conference on Robotics and Automation, 1993.
S. Carpin, L. E. Parker, “Cooperative Leader Following in a Distributed Multi-Robot System”, IEEE International Conference on Robotics and Automation, 2002.

Motion Coordination: Future Directions
HighHigh--impact, open research issue:impact, open research issue:
•• How do we generate robust motion coordination for 3D How do we generate robust motion coordination for 3D environments in previously unknown terrain amidst environments in previously unknown terrain amidst dynamically moving obstacles?dynamically moving obstacles?

3. Communication
Objective: Enable robots to exchange state and environmental information with a minimum bandwidth requirement
Issues studied:• Explicit vs. Implicit• Local vs. Global• Impact of bandwidth restrictions• “Awareness” • Variety of mediums: radio, IR, chemical scents,
“breadcrumbs”, etc.
Balch and Arkin
Jung and Zelinsky

Communication: Future Directions
High impact, open research issues:High impact, open research issues:
•• How do we enable multiHow do we enable multi--robot teams to work reliably in robot teams to work reliably in faulty communication environments?faulty communication environments?
•• Can we develop passive action recognition capabilities Can we develop passive action recognition capabilities in robot teams?in robot teams?
•• How do we enable multiHow do we enable multi--robot teams to set up robot teams to set up dynamic, mobile communications networks?dynamic, mobile communications networks?

4. Object Transport and Manipulation
Objective: Enabling multiple robots to collaboratively push, move, or carry objects that cannot be handled by one robot alone
• Issues studied:– Constrained vs. unconstrained motions– Two-robot teams versus "swarm"-type teams– Compliant vs. non-compliant grasping mechanisms– Cluttered vs. uncluttered environments– Global system models vs. distributed models– Etc.
Kube
Parker

Cooperative Baton Passing
• Our research has shown how mobile robots can perform tightly-coupled cooperation embedded in a “loosely-coupled” cooperative architecture.

Object Transport and Manipulation: Future Directions
HighHigh--impact, open research issue:impact, open research issue:
•• Can we achieve cooperative transport over uneven Can we achieve cooperative transport over uneven outdoor terrains?outdoor terrains?

5. Reconfigurable Robotics
Objective: Obtain function from shape, allowing modules to (re)connect to form shapes that achieve desired purpose
• Earliest research included reconfigurable/cellular robotics
• Several newer projects:– Various navigation configurations (rolling track,
spider, snake, etc.)– Lattices, matrices (for stair climbing, object support,
etc.)Castano et. al.

Movies of PolyBot(Mark Yim, Xerox PARC)
Tricycle pedalingStair Climbing
Porous material climbing

Reconfigurable Robotic: Future Directions
HighHigh--impact, open research issues:impact, open research issues:
•• How do we facilitate autonomous (vs. manual) How do we facilitate autonomous (vs. manual) reconfiguration?reconfiguration?
•• How can we extend concepts to practical applications?How can we extend concepts to practical applications?

6. Architectures, Task Planning, and Control
Objective: Development of overall control approach enabling robot teams to effectively accomplish given tasks
• Issues studied:– Action selection– Delegation of authority and control– Communication structure– Heterogeneity versus homogeneity of robots– Achieving coherence amidst local actions– Resolution of conflicts

Example 1: “Mock” hazardous waste cleanup -- Part I
L. E. Parker, “On the design of behavior-based multi-robot teams”, Advanced Robotics, 1996.L. E. Parker, “ALLIANCE: An architecture for fault tolerant multi-robot cooperation”,
IEEE Transactions on Robotics and Automation, 1998.L. E. Parker, “Evaluating success in autonomous multi-robot teams: Experiences from ALLIANCE architecture
implementations”, Journal of Theoretical and Experimental Artificial Intelligence, 2001.

Example 1: “Mock” hazardous waste cleanup -- Part II

Example 1: “Mock” hazardous waste cleanup -- Part III

Architectures, Task Planning, and Control: Future Directions
HighHigh--impact, open research issues:impact, open research issues:
•• Can a general architecture be developed that is easily Can a general architecture be developed that is easily tailored to fit a wide range of multitailored to fit a wide range of multi--robot systems and robot systems and applications? Or, are specialized architectures required?applications? Or, are specialized architectures required?
•• How do we quantitatively measure and compare different How do we quantitatively measure and compare different multimulti--robot team architectures?robot team architectures?

7. Localization, Mapping, and Exploration
Objective: Enable robot teams to cooperatively build models of their environment, or to accomplish spatial tasks requiring knowledge of other robot positions
• Issues studied:– Extension of single-robot mapping approach to multi-
robot teams– Hardware, algorithms for robot positioning– Sonar vs. laser vs. stereo imagery vs. fusion of
several sensors– Landmarks vs. scan-matching

Example Movie of Distributed Localization(Univ. of Southern California)

Localization, Mapping, and Exploration: Future Directions
HighHigh--impact, open research issues:impact, open research issues:
•• How do we reliably localize, map, and explore in 3D How do we reliably localize, map, and explore in 3D environments (especially with limited or unavailable DGPS)?environments (especially with limited or unavailable DGPS)?
•• As we extend to cooperative localization, how do we As we extend to cooperative localization, how do we determine the limit of effectiveness of adding more robots todetermine the limit of effectiveness of adding more robots tothe team?the team?
•• How do we merge information efficiently, in light of How do we merge information efficiently, in light of communication limitations, noisy sensors, and localization communication limitations, noisy sensors, and localization errors?errors?

8. Learning
Objective: Enable multi-robot teams to adapt or develop own control approach to solve a task with minimal human operator input
• Application domains studied:– Predator/prey– Box pushing – Foraging– Multi-robot soccer– Cooperative target observation
Parker

Example: Adaptive Box Pushing
L. E. Parker, “Adaptive Heterogeneous Multi-Robot Teams”, Neurocomputing, 1999.

Learning: Future Directions
HighHigh--impact, open research issues:impact, open research issues:
•• Can we generate efficient learning in inherently Can we generate efficient learning in inherently cooperative tasks?cooperative tasks?
•• How do we deal with credit assignment in groups How do we deal with credit assignment in groups ----determining individual robot contributions from group determining individual robot contributions from group performance?performance?

New Research Areas Receiving Increased Attention
• Robot-Agent-People teams as peers
• Heterogeneous teams
• Physical demonstrations of large numbers of robots (>=100)

Summary of Introduction to Topic
• Dramatic increase in research publications in multi-robot systems in last 5 years.
• Eight “traditional” topic areas studied within a variety of applications
• New research areas emerging
• In all research, before it will be used practically in real-world applications, need increased focus on:– Robustness– Reliability

Topics to be Studied this Semester
• Taxonomies, Metrics, Evaluation
• Biological Inspirations
• Low-level, homogeneous, swarm robots– Swarming, dispersion, homing, etc.– Search/coverage– Sensor networks– Communication and communications networks– Formations– Pursuit/herding– Tracking
• Reconfigurable robots

Topics to be Studied this Semester (con’t.)
• Higher-level strategies, Heterogeneous Robots– Multi-robot path planning, traffic management– Task allocation:
• Negotiation-based• Market-based• Modeling-based
– Marsupial teams– Air-ground teams– Multi-robot soccer
• Embedded Systems– Smart dust– Intelligent rooms/smart homes– Amorphous/pervasive computing

Preview of Next Class
• Biological Inspiration– Birds and Bees ;-)– Herds and schools– Stigmergy– Etc.
• Reading list distributed, presentation selections begin
• Homework 1 distributed