New exact bounded travelling wave solutions for the Zhiber–Shabat equation
13
Click here to load reader
Transcript of New exact bounded travelling wave solutions for the Zhiber–Shabat equation

Nonlinear Analysis 71 (2009) 1636–1648
Contents lists available at ScienceDirect
Nonlinear Analysis
journal homepage: www.elsevier.com/locate/na
New exact bounded travelling wave solutions for theZhiber–Shabat equationHe Bin ∗, Long Yao, Rui WeiguoDepartment of Mathematics, Honghe University, Mengzi, Yunnan, 661100, PR China
a r t i c l e i n f o
Article history:Received 23 April 2008Accepted 6 January 2009
MSC:34C25-2858F0558F1458F30
PACS:02.30.Ik02.30.Jr05.45.Yv
Keywords:Zhiber–Shabat equationSmooth solitary waveCompactonSmooth periodic waveExact solution
a b s t r a c t
In this paper, the Zhiber–Shabat equation is studied by using the bifurcation theory andthe method of phase portraits analysis. Many smooth solitary wave solutions, compactonsolutions and smooth periodic wave solutions are obtained. Some previous results areextended.
© 2009 Elsevier Ltd. All rights reserved.
1. Introduction
In this paper, we consider the following Zhiber–Shabat equation [1–4]:
uxt + peu + qe−u + re−2u = 0, (1)
where p, q and r are arbitrary constants. When q = r = 0, Eq. (1) reduces to the well-known Liouville equation [2]. Whenq = 0, r 6= 0, Eq. (1) reduces to the well-known Dodd–Bullough–Mikhailov equation [2]. And when q 6= 0, r = 0, Eq. (1)reduces to the wellknown Sinh-Gordon equation [5].In 1992, Conte and Musette [1] studied Eq. (1) and obtained two kinds of solutions by making Eq. (1) satisfy a projective
Riccati system. Using the tanh method and the extended tanh method, Wazwaz [3] obtained six exact solutions of Eq. (1).Tang et al. [4] considered the Existence of bounded travelling wave solutions of Eq. (1) and obtained several travelling wavesolutions.In this paper, we investigate the Eq. (1) using the bifurcation theory and themethod of phase portraits analysis [6,7], and
we shall get many new exact bounded travelling wave solutions.
∗ Corresponding author. Tel.: +86 873 3699153; fax: +86 873 3698806.E-mail addresses: [email protected], [email protected] (B. He).
0362-546X/$ – see front matter© 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.na.2009.01.029

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1637
We look for travelling wave solutions to the Eq. (1) in the form
u(x, t) = φ(ξ), (2)
where ξ = x− ct, c 6= 0.Substituting (2) into (1), we obtain
− cφ′′ + peφ + qe−φ + re−2φ = 0, (3)
where‘‘′’’ is the derivative with respect to ξ .Applying the transformation
φ = ln(µ+ ψ), φ′ =ψ ′
µ+ ψ, φ′′ =
(µ+ ψ)ψ ′′ − (ψ ′)2
(µ+ ψ)2, (4)
(3) becomes
(µ+ ψ)ψ ′′ − α(µ+ ψ)3 − β(µ+ ψ)− (ψ ′)2 − γ = 0, (5)
where µ is a arbitrary constant and α = pc , β =
qc , γ =
rc .
Setting γ = −αµ3 − βµ, we have
(µ+ ψ)ψ ′′ − αψ3 − 3αµψ2 − (3αµ2 + β)ψ − (ψ ′)2 = 0. (6)
Letting y = dψdξ , we get the following planar system
dψdξ= y,
dydξ=αψ3 + 3αµψ2 + (3αµ2 + β)ψ + y2
ψ + µ. (7)
Using the transformation dξ = (ψ + µ)dτ , it carries (7) into the Hamiltonian system
dψdτ= (ψ + µ)y,
dydτ= αψ3 + 3αµψ2 + (3αµ2 + β)ψ + y2. (8)
Since both system (7) and (8) have the same first integral
(y2 − 2αψ(ψ + µ)2 + 2β(ψ + µ)− µ(αµ2 + β))(ψ + µ)−2 = h, (9)
two systems above have the same topological phase portraits except the line ψ = −µ.The rest of this paper is organized as follows: In Section 2, we discuss the bifurcation phase portraits of system (8). In
Section 3, we givemany smooth solitary wave solutions, compacton solutions and smooth periodic wave solutions of Eq. (1)in explicit form. A short conclusion will be given in Section 4.
2. The bifurcation phase portraits of system (8)
Write ∆1 = −α(3αµ2 + 4β),∆2 = µ(αµ2 + β), ψs = −µ. Clearly, when ∆1 > 0, system (8) has three equilibriumpoint at O(0, 0), A1,2(ψ1,2, 0) in ψ-axis, where ψ1,2 =
−3αµ±√∆1
2α . When∆1 = 0, system (8) has two equilibrium points atO(0, 0), A12(ψ12, 0) in ψ-axis, where ψ12 = −
3αµ2α . When∆2 > 0, there exist two equilibrium points of system (8) in line
ψ = ψs at S±(ψs, Y±), Y± = ±√∆2.
Let M(ψi, ye) be the coefficient matrix of the linearized system of the system (8) at an equilibrium point (ψi, ye). Thenwe have Trace(M(ψi, 0)) = 0 and
J(0, 0) = detM(0, 0) = −µ(3αµ2 + β), (10)
J(ψ1, 0) = detM(ψ1, 0) = −(αµ−
√∆1)(3αµ2 + 3µ
√∆1 + 4β)
4α, (11)
J(ψ2, 0) = detM(ψ2, 0) =(αµ+
√∆1)(−3αµ2 + 3µ
√∆1 − 4β)
4α, (12)
J(ψ12, 0) = detM(ψ12, 0) = −µ(3αµ2 + 4β)
4, (13)
J(ψs, Y±) = detM(ψs, Y±) = 2µ(αµ2 + β), (14)
Trace(M(ψs, Y±))2 − 4J(ψs, Y±) = Y 2±. (15)

1638 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
By the theory of planar dynamical system, we know that for an equilibrium point (ψi, ye) of a planar integrable system,if J(ψi, ye) < 0 then the equilibrium point (ψi, ye) is a saddle point; if J(ψi, ye) > 0 and Trace(M(φi, ye)) = 0 then it is acenter point; if J(ψi, ye) > 0 and Trace(M(ψi, ye))2 − 4J(ψi, ye) > 0 then it is a node; if J(ψi, ye) = 0 and the Poincaréindex of the equilibrium point (ψi, ye) is zero then it is a cusp.By using the property of equilibrium points and bifurcation theory, we can obtain the bifurcation curves as follows:
L1: µ = 0, L2: β = −34αµ2(µ > 0 or µ < 0), L3: β = −αµ2(µ > 0 or µ < 0),
L4: β = −3αµ2(µ > 0 or µ < 0).
When α < 0, there are 16 different regions partitioned by the L1, L2, L3 and L4 on the parameter (µ, β) plane as follows:A1 = {(µ, β)|µ > 0, β < − 34αµ
2}; A2 = {(µ, β)|µ > 0, β = − 34αµ
2}; A3 = {(µ, β)|µ > 0,− 34αµ
2 < β < −αµ2};A4 = {(µ, β)|µ > 0, β = −αµ2}; A5 = {(µ, β)|µ > 0,−αµ2 < β < −3αµ2}; A6 = {(µ, β)|µ > 0, β = −3αµ2};A7 = {(µ, β)|µ > 0, β > −3αµ2}; A8 = {(µ, β)|µ < 0, β < − 34αµ
2}; A9 = {(µ, β)|µ < 0, β = − 34αµ
2};
A10 = {(µ, β)|µ < 0,− 34αµ2 < β < −αµ2}; A11 = {(µ, β)|µ < 0, β = −αµ2}; A12 = {(µ, β)|µ < 0,−αµ2 <
β < −3αµ2}; A13 = {(µ, β)|µ < 0, β = −3αµ2}; A14 = {(µ, β)|µ < 0, β > −3αµ2}; A15 = {(µ, β)|µ = 0, β > 0};A16 = {(µ, β)|µ = 0, β < 0}.When α = 0, there are 4 different regions partitioned by the L1, L2, L3 and L4 on the parameter (µ, β) plane as follows:B1 = {(µ, β)|µ > 0, β > 0}; B2 = {(µ, β)|µ < 0, β > 0}; B3 = {(µ, β)|µ < 0, β < 0}; B4 = {(µ, β)|µ > 0, β < 0}.When α > 0, there are 16 different regions partitioned by the L1, L2, L3 and L4 on the parameter (µ, β) plane as follows:C1 = {(µ, β)|µ > 0, β < −3αµ2}; C2 = {(µ, β)|µ > 0, β = −3αµ2}; C3 = {(µ, β)|µ > 0,−3αµ2 < β < −αµ2};
C4 = {(µ, β)|µ > 0, β = −αµ2}; C5 = {(µ, β)|µ > 0,−αµ2 < β < − 34αµ2}; C6 = {(µ, β)|µ > 0, β = − 34αµ
2};
C7 = {(µ, β)|µ > 0, β > − 34αµ2}; C8 = {(µ, β)|µ < 0, β < −3αµ2}; C9 = {(µ, β)|µ < 0, β = −3αµ2};
C10 = {(µ, β)|µ < 0,−3αµ2 < β < −αµ2}; C11 = {(µ, β)|µ < 0, β = −αµ2}; C12 = {(µ, β)|µ < 0,−αµ2 <β < − 34αµ
2}; C13 = {(µ, β)|µ < 0, β = − 34αµ
2}; C14 = {(µ, β)|µ < 0, β > − 34αµ
2}; C15 = {(µ, β)|µ = 0, β > 0};
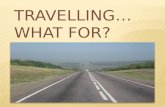
C16 = {(µ, β)|µ = 0, β < 0}.The bifurcation phase portraits of system (8) shown in Figs. 1–3.
3. Bounded travelling wave solutions of Eq. (1)
We denote sn(x, k), sc(x, k) and cn(x, k) as Jacobian elliptic functions with the modulus k and K(k) =∫ π20
dθ√1−k2 sin2 θ
is
complete Elliptic integrals of first kind [8]. From Figs. 1 and 3, we have the following conclusions:
3.1
Suppose that (µ, β) ∈ A3, i.e. α < 0, µ > 0,− 34αµ2 < β < −αµ2, system (8) has three equilibrium points
(ψ1, 0), (ψ2, 0), (0, 0) (ψ1 < ψ2 < ψs < 0) inψ-axis, whereψ1,2 =−3αµ±
√∆1
2α .(ψ1, 0) is a saddle point and (ψ2, 0), (0, 0)are both center points.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (φM , 0)(see Fig. 1(1-3)). Its expression is
y = ±√−2α(ψ − ψ1)
√ψM − ψ, (16)
where ψM =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.
Substituting (16) into the dψdξ = y and integrating it along the homoclinic orbit, yields equation∫ ψM
ψ
ds(s− ψ1)
√ψM − s
=√−2α|ξ |. (17)
Completing the integral and solving the equation for ψ , it follows that
ψ(ξ) =(2ψM − ψ1)+ ψ1 cosh(ωξ)
1+ cosh(ωξ), (18)
where ω =√2α(ψ1 − ψM).
According to (2) and (4), we get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =(2ψM − ψ1)+ ψ1 cosh(ω(x− ct))
1+ cosh(ω(x− ct)). (19)

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1639
Fig. 1. The bifurcation phase portraits of system (8) when α < 0.
3.2
Suppose that (µ, β) ∈ A4, i.e. α < 0, µ > 0, β = −αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0) (ψ1 < ψ2 = ψs < 0) in ψ-axis, where ψ1 = −2µ, ψ2 = −µ. (ψ1, 0) is a saddle point, (ψ2, 0) is acomplex equilibrium point and (0, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψs, 0) (see Fig. 1(1-4)). Its expression is
y = ±√−2α(ψ − ψ1)
√ψs − ψ. (20)
We get the smooth solitary wave solution of Eq. (1) as follow:

1640 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
Fig. 2. The bifurcation phase portraits of system (8) when α = 0.
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =ψ1
1+ sech(ω(x− ct)), (21)
where ω =√αψ1.
There are uncountably infinite many orbits connecting with (ψs, 0) (see Fig. 1(1-4)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψm − ψ)(ψs − ψ), (22)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > −2αµ. We get the compacton solution of Eq. (1) as follow:u(x, t) = ln(µ+ ψ(x− ct)),
ψ(x− ct) =
ψs − ψmsn2(ω(x− ct), k)
cn2(ω(x− ct), k), |(x− ct)| ≤
4K(k)√2α(ψs − ψM)
α(ψs − ψM),
0, others,(23)
where ω = 12
√2α(ψs − ψM), k =
√ψM−ψmψM−ψs
.
There are a family of periodic orbits enclose (0, 0) (see Fig. 1(1-4)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψm − ψ)(ψs − ψ), (24)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > −2αµ. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψMcn2(ω(x− ct), k)+ ψmsn2(ω(x− ct), k), (25)
where ω = 12
√2α(ψs − ψM), k =
√ψM−ψmψM−ψs
.
There are a family of periodic orbits connecting with (ψs, 0) (see Fig. 1(1-4)). Their expressions are
y = ±√−2α
√(ψs − ψ)(ψ − ψM)(ψ − ψm), (26)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h < 6αµ. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψscn2(ω(x− ct), k)+ ψMsn2(ω(x− ct), k), (27)
where ω = 12
√2α(ψm − ψs), k =
√ψs−ψMψs−ψm
.
3.3
Suppose that (µ, β) ∈ A5, i.e. α < 0, µ > 0,−αµ2 < β < −3αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0) (ψ1 < ψs < ψ2 < 0) in ψ-axis, where ψ1,2 =
−3αµ±√∆1
2α . (ψ1, 0), (ψ2, 0) are both saddle pointsand (0, 0) is a center point.There is a homoclinic orbit connecting with (ψ2, 0) and passing point (ψM , 0) (see Fig. 1(1-5)). Its expression is
y = ±√−2α(ψ − ψ2)
√ψM − ψ, (28)
where ψM =2αµ(β−µ
√∆1)
(αµ+√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =(2ψM − ψ2)+ ψ2 cosh(ω(x− ct))
1+ cosh(ω(x− ct)), (29)
where ω =√2α(ψ2 − ψM).

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1641
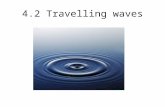
Fig. 3. The bifurcation phase portraits of system (8) when α > 0.
3.4
Suppose that (µ, β) ∈ A7, i.e. α < 0, µ > 0, β > −3αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0)(ψ1 < ψs < 0 < ψ2) in ψ-axis, where ψ1,2 =
−3αµ±√∆1
2α . (ψ1, 0), (0, 0) are both saddle pointsand (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (0, 0) and passing point (ψM , 0) (see Fig. 1(1-7)). Its expression is
y = ±√−2αψ
√ψM − ψ, (30)

1642 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
where ψM = −3αµ2+β2αµ . We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψMsech2(ω(x− ct)), (31)
where ω = 12
√−2αψM .
3.5
Suppose that (µ, β) ∈ A10, i.e. α < 0, µ < 0,− 34αµ2 < β < −αµ2, system (8) has three equilibrium points
(0, 0), (ψ1, 0), (ψ2, 0) (0 < ψs < ψ1 < ψ2) in ψ-axis, where ψ1,2 =−3αµ±
√∆1
2α . (0, 0), (ψ1, 0) are both saddle pointsand (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψM , 0) (see Fig. 1(1-10)). Its expression is
y = ±√−2α(ψ − ψ1)
√ψM − ψ, (32)
where ψM =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as (19).
3.6
Suppose that (µ, β) ∈ A11, i.e. α < 0, µ < 0, β = −αµ2, system (8) has three equilibrium points(0, 0), (ψ1, 0), (ψ2, 0)(0 < ψ1 = ψs < ψ2) in ψ-axis, where ψ1 = −µ,ψ2 = −2µ. (0, 0) is a saddle point, (ψ1, 0)is a complex equilibrium point and (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (0, 0) and passing point (ψ1, 0) (see Fig. 1(1-11)). Its expression is
y = ±√−2αψ
√ψs − ψ. (33)
We can get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψssech2(ω(x− ct)), (34)
where ω = 12
√−2αψs.
There are uncountably infinite many orbits connecting with (ψs, 0) (see Fig. 1(1-11)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψm − ψ)(ψs − ψ), (35)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > 6αµ. We get the compacton solution of Eq. (1) as (23).There are a family of periodic orbits enclose (ψ2, 0) (see Fig. 1(1-11)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψm − ψ)(ψs − ψ), (36)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > 6αµ. We get the smooth periodic wave solution of Eq. (1) as (25).There are a family of periodic orbits connecting with (ψs, 0) (see Fig. 1(1-11)). Their expressions are
y = ±√−2α
√(ψs − ψ)(ψ − ψM)(ψ − ψm), (37)
where ψm,M =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h < −2αµ. We get the smooth periodic wave solution of Eq. (1) as (27).
3.7
Suppose that (µ, β) ∈ A12, i.e. α < 0, µ < 0,−αµ2 < β < −3αµ2, system (8) has three equilibrium points(0, 0), (ψ1, 0), (ψ2, 0)(0 < ψ1 < ψs < ψ2) inψ-axis, whereψ1,2 =
−3αµ±√∆1
2α . (0, 0) is a saddle point and (ψ1, 0), (ψ2, 0)are both center points.There is a homoclinic orbit connecting with (0, 0) and passing point (ψM , 0)(see Fig. 1(1-12)). Its expression is
y = ±√−2αψ
√ψM − ψ, (38)
where ψM = −3αµ2+β2αµ . We get the smooth solitary wave solution of Eq. (1) as (31).
3.8
Suppose that (µ, β) ∈ A14, i.e. α < 0, µ < 0, β > −3αµ2, system (8) has three equilibrium points(ψ1, 0), (0, 0), (ψ2, 0)(ψ1 < 0 < ψs < ψ2) inψ-axis, whereψ1,2 =
−3αµ±√∆1
2α .(ψ1, 0) is a saddle point and (0, 0), (ψ2, 0)are both center points.

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1643
There is a homoclinic orbit connecting with (ψ1, 0) and passing point (φM , 0) (see Fig. 1(1-14)). Its expression is
y = ±√−2α(ψ − ψ1)
√ψM − ψ, (39)
where ψM =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as (19).
3.9
Suppose that (µ, β) ∈ A15, i.e. α < 0, µ = 0, β > 0, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0) (ψ1 < 0 = ψs < ψ2) in ψ-axis, where ψ1,2 = ±
√−αβ
α.(ψ1, 0) is a saddle point, (0, 0) is a complex
equilibrium point and (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (0, 0) (see Fig. 1(1-15)). Its expression is
y = ±√−2α(ψ − ψ1)
√−ψ. (40)
We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) =ψ1(cosh(ω(x− ct))− 1)1+ cosh(ω(x− ct))
, (41)
where ω =√2αψ1.
There are uncountably infinite many orbits connecting with (0, 0) (see Fig. 1(1-15)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψm − ψ)(0− ψ), (42)
where ψm,M =−h±√h2+16αβ4α , h > 4
√−αβ . We get the compacton solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) =
−ψmsc2(ω(x− ct), k), |(x− ct)| ≤ −4K(k)√−2αψM
αψM,
0, others,(43)
where ω = 12
√−2αψM , k =
√ψM−ψmψM
.
There are a family of periodic orbits enclose (ψ2, 0) (see Fig. 1(1-15)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψ − ψm)(ψ − 0), (44)
where ψm,M =−h±√h2+16αβ4α , h > 4
√−αβ . We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) = ψMcn2(ω(x− ct), k)+ ψmsn2(ω(x− ct), k), (45)
where ω = 12
√−2αψM , k =
√ψM−ψmψM
.
There are a family of periodic orbits connecting with (0, 0) (see Fig. 1(1-15)). Their expressions are
y = ±√−2α
√(0− ψ)(ψ − ψM)(ψ − ψm), (46)
where ψm,M =−h±√h2+16αβ4α , h < −4
√−αβ . We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) = ψMsn2(ω(x− ct), k), (47)
where ω = 12
√2αψm, k =
√ψMψm.
3.10
Suppose that (µ, β) ∈ A16, i.e. α < 0, µ = 0, β < 0, system (8) has one equilibrium point (0, 0) in ψ-axis. (0, 0) is acomplex equilibrium point.There are a family of periodic orbits connecting with (0, 0) (see Fig. 1(1-16)). Their expressions are
y = ±√−2α
√(ψM − ψ)(ψ − 0)(ψ − ψm), (48)
where ψm,M =−h±√h2+16αβ4α ,−∞ < h < +∞. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) = ψMcn2(ω(x− ct), k), (49)
where ω = 12
√2α(ψm − ψM), k =
√ψM
ψM−ψm.

1644 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
3.11
Suppose that (µ, β) ∈ C1, i.e. α > 0, µ > 0, β < −3αµ2, system (8) has three equilibrium points(0, 0), (ψ1, 0), (ψ2, 0)(ψ2 < ψs < 0 < ψ1) inψ-axis, whereψ1,2 =
−3αµ±√∆1
2α . (ψ1, 0) is a saddle point and (0, 0), (ψ2, 0)are both center points.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψm, 0) (see Fig. 3(3-1)). Its expression is
y = ±√2α(ψ − ψ1)
√ψ − ψm, (50)
where ψm =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as follows:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =(2ψm − ψ1)+ ψ1 cosh(ω(x− ct))
1+ cosh(ω(x− ct)), (51)
where ω =√2α(ψ1 − ψm).
3.12
Suppose that (µ, β) ∈ C3, i.e. α > 0, µ > 0,−3αµ2 < β < −αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0) (ψ2 < ψs < ψ1 < 0) inψ-axis, whereψ1,2 =
−3αµ±√∆1
2α . (0, 0) is a saddle point and (ψ1, 0), (ψ2, 0)are both center points.There is a homoclinic orbit connecting with (0, 0) and passing point (ψm, 0) (see Fig. 3(3-3)). Its expression is
y = ±√2αψ
√ψ − ψm, (52)
where ψm = −3αµ2+β2αµ . We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψmsech2(ω(x− ct)), (53)
where ω = 12
√−2αψm.
3.13
Suppose that (µ, β) ∈ C4, i.e. α > 0, µ > 0, β = −αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0)(ψ2 < ψ1 = ψs < 0) in ψ-axis, where ψ1 = −µ,ψ2 = −2µ.(0, 0) is a saddle point, (ψ1, 0) isa complex equilibrium point and (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (0, 0) and passing point (ψs, 0) (see Fig. 3(3-4)). Its expression is
y = ±√2αψ
√ψ − ψs. (54)
We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψssech2(ω(x− ct)), (55)
where ω = 12
√−2αψs.
There are uncountably infinite many orbits connecting with (ψs, 0) (see Fig. 3(3-4)). Their expressions are
y = ±√2α
√(ψ − ψs)(ψ − ψM)(ψ − ψm), (56)
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > 6αµ. We get the compacton solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)),
ψ(x− ct) =
ψs − ψMsn2(ω(x− ct), k)
cn2(ω(x− ct), k), |(x− ct)| ≤
4K(k)√2α(ψs − ψm)
α(ψs − ψm),
0, others,(57)
where ω = 12
√2α(ψs − ψm), k =
√ψM−ψmψs−ψm
.
There are a family of periodic orbits enclose (ψ2, 0) (see Fig. 3(3-4)). Their expressions are
y = ±√2α
√(ψ − ψs)(ψ − ψM)(ψ − ψm), (58)

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1645
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > 6αµ. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) = ψmcn2(ω(x− ct), k)+ ψMsn2(ω(x− ct), k), (59)
where ω = 12
√2α(ψs − ψm), k =
√ψM−ψmψs−ψm
.
There are a family of periodic orbits connecting with (ψs, 0) (see Fig. 3(3-4)). Their expressions are
y = ±√2α
√(ψM − ψ)(ψm − ψ)(ψ − ψs), (60)
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h < −2αµ. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =ψm(ψM − ψs)+ ψM(ψs − ψm)sn2(ω(x− ct), k)(ψM − ψs)+ (ψs − ψm)sn2(ω(x− ct), k)
, (61)
where ω = 12
√2α(ψM − ψs), k =
√ψm−ψsψM−ψs
.
3.14
Suppose that (µ, β) ∈ C5, i.e. α > 0, µ > 0,−αµ2 < β < − 34αµ2, system (8) has three equilibrium points
(ψ1, 0), (ψ2, 0), (0, 0)(ψ2 < ψ1 < ψs < 0) in ψ-axis, where ψ1,2 =−3αµ±
√∆1
2α .(ψ1, 0), (0, 0) are both saddle pointsand (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψm, 0) (see Fig. 3(3-5)). Its expression is
y = ±√2α(ψ − ψ1)
√ψ − ψm, (62)
where ψm =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as (51).
3.15
Suppose that (µ, β) ∈ C8, i.e. α > 0, µ < 0, β < −3αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0)(ψ2 < 0 < ψs < ψ1) in ψ-axis, where ψ1,2 =
−3αµ±√∆1
2α . (0, 0), (ψ1, 0) are both saddle pointsand (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (0, 0) and passing point (ψm, 0) (see Fig. 3(3-8)). Its expression is
y = ±√2αψ
√ψ − ψm, (63)
where ψm = −3αµ2+β2αµ . We get the smooth solitary wave solution of Eq. (1) as (53).
3.16
Suppose that (µ, β) ∈ C10, i.e. α > 0, µ < 0,−3αµ2 < β < −αµ2, system (8) has three equilibrium points(0, 0), (ψ1, 0), (ψ2, 0)(0 < ψ2 < ψs < ψ1) inψ-axis, whereψ1,2 =
−3αµ±√∆1
2α . (ψ1, 0), (ψ2, 0) are both saddle points and(0, 0) is a center point.There is a homoclinic orbit connecting with (ψ2, 0) and passing point (ψm, 0) (see Fig. 3(3-10)). Its expression is
y = ±√2α(ψ − ψ2)
√ψ − ψm, (64)
where ψm =2αµ(β−µ
√∆1)
(αµ+√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =(2ψm − ψ2)+ ψ2 cosh(ω(x− ct))
1+ cosh(ω(x− ct)), (65)
where ω =√2α(ψ2 − ψm).

1646 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
3.17
Suppose that (µ, β) ∈ C11, i.e. α > 0, µ < 0, β = −αµ2, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0)(0 < ψ2 = ψs < ψ1) in ψ-axis, where ψ1 = −2µ,ψ2 = −µ.(ψ1, 0) is a saddle point, (ψ2, 0)is a complex equilibrium point and (0, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψs, 0) (see Fig. 3(3-11)). Its expression is
y = ±√2α(ψ − ψ1)
√ψ − ψs. (66)
We get the smooth solitary wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =ψ1 cosh(ω(x− ct))1+ cosh(ω(x− ct))
, (67)
where ω =√2α(ψ1 − ψs).
There are uncountably infinite many orbits connecting with (ψs, 0) (see Fig. 3(3-11)). Their expressions are
y = ±√2α
√(ψ − ψs)(ψ − ψM)(ψ − ψm), (68)
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > −2αµ. We get the compacton solution of Eq. (1) as (57).There are a family of periodic orbits enclose (0, 0) (see Fig. 3(3-11)). Their expressions are
y = ±√2α
√(ψ − ψs)(ψ − ψM)(ψ − ψm), (69)
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h > −2αµ. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(µ+ ψ(x− ct)), ψ(x− ct) =ψM(ψs − ψm)− ψs(ψM − ψm)sn2(ω(x− ct), k)(ψs − ψm)− (ψM − ψm)sn2(ω(x− ct), k)
, (70)
where ω = 12
√2α(ψs − ψm), k =
√ψM−ψmψs−ψm
.
There are a family of periodic orbits connecting with (ψs, 0) (see Fig. 3(3-11)). Their expressions are
y = ±√2α
√(ψ − ψM)(ψ − ψm)(ψ − ψs), (71)
where ψM,m =−(2αµ+h)±
√h2−4αµh−12α2µ2
4α , h < 6αµ. We get the smooth periodic wave solution of Eq. (1) as (61).
3.18
Suppose that (µ, β) ∈ C12, i.e. α > 0, µ < 0,−αµ2 < β < − 34αµ2, system (8) has three equilibrium points
(0, 0), (ψ1, 0), (ψ2, 0) (0 < ψs < ψ2 < ψ1) inψ-axis, whereψ1,2 =−3αµ±
√∆1
2α . (ψ1, 0) is a saddle point and (0, 0), (ψ2, 0)are both center points.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (ψm, 0) (see Fig. 3(3-12)). Its expression is
y = ±√2α(ψ − ψ1)
√ψ − ψm, (72)
where ψm =2αµ(β+µ
√∆1)
(αµ−√∆1)2
.We get the smooth solitary wave solution of Eq. (1) as (51).
3.19
Suppose that (µ, β) ∈ C15, i.e. α > 0, µ = 0, β > 0, system (8) has one equilibrium point (0, 0) in ψ-axis. (0, 0) is acomplex equilibrium point.There are a family of periodic orbits connecting with (0, 0) (see Fig. 3(3-15)). Their expressions are
y = ±√2α
√(ψM − ψ)(0− ψ)(ψ − ψm), (73)
where ψM,m =−h±√h2+16αβ4α , −∞ < h < +∞. We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) = ψmcn2(ω(x− ct), k), (74)
where ω = 12
√2α(ψM − ψm), k =
√ψm
ψm−ψM.

B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648 1647
3.20
Suppose that (µ, β) ∈ C16, i.e. α > 0, µ = 0, β < 0, system (8) has three equilibrium points(ψ1, 0), (ψ2, 0), (0, 0) (ψ2 < 0 = ψs < ψ1) in ψ-axis, where ψ1,2 = ±
√−αβ
α.(ψ1, 0) is a saddle point, (0, 0) is a complex
equilibrium point and (ψ2, 0) is a center point.There is a homoclinic orbit connecting with (ψ1, 0) and passing point (0, 0) (see Fig. 3(3-16)). Its expression is
y = ±√2α(ψ − ψ1)
√ψ. (75)
We get the smooth solitary wave solution of Eq. (1) as (41).There are uncountably infinite many orbits connecting with (0, 0) (see Fig. 3(3-16)). Their expressions are
y = ±√2α
√(ψ − 0)(ψ − ψM)(ψ − ψm), (76)
where ψM,m =−h±√h2+16αβ4α , h > 4
√−αβ . We get the compacton solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)),
ψ(x− ct) =
−ψMsc2(ω(x− ct), k), |(x− ct)| ≤ −4K(k)√−2αψm
αψm,
0, others,(77)
where ω = 12
√−2αψm, k =
√ψm−ψMψm
.
There are a family of periodic orbits enclose (ψ2, 0) (see Fig. 3(3-16)). Their expressions are
y = ±√2α
√(ψ − 0)(ψ − ψM)(ψ − ψm), (78)
where ψM,m =−h±√h2+16αβ4α , h > 4
√−αβ . We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) =ψmψM
ψm + (ψM − ψm)sn2(ω(x− ct)), (79)
where ω = 12
√−2αψm, k =
√ψm−ψMψm
.
There are a family of periodic orbits connecting with (0, 0) (see Fig. 3(3-16)). Their expressions are
y = ±√2α
√(ψ − ψM)(ψ − ψm)(ψ − 0), (80)
where ψM,m =−h±√h2+16αβ4α , h < −4
√−αβ . We get the smooth periodic wave solution of Eq. (1) as follow:
u(x, t) = ln(ψ(x− ct)), ψ(x− ct) =ψmψMcn2(ω(x− ct), k)ψM − ψmsn2(ω(x− ct), k)
, (81)
where ω = 12
√2αψM , k =
√ψmψM.
4. Conclusion
In this paper, using the bifurcation theory and the method of phase portraits analysis, and applying the transformation(4), some smooth solitary wave solutions, compacton solutions and smooth periodic wave solutions of Eq. (1) are obtained.Compared with previous results, many of them are new travelling wave solutions. The ideas of this paper are also appliedto the other high-order nonlinear differential equations.
Acknowledgments
The authors thank the referees for some perceptive comments and for some valuable suggestions. This research wassupported by Natural Science Foundation of Yunnan Province, China (2007A080M) and the National Natural ScienceFoundation of China (10571062).

1648 B. He et al. / Nonlinear Analysis 71 (2009) 1636–1648
References
[1] R. Conte, M. Musette, Link between solitary waves and projective Riccati equations, J. Phys. A 25 (1992) 5609–5623.[2] M. Lakshmanan, P. Kalianppan, Lie transformations, nonlinear evolution equations, and Painleve forms, J. Math. Phys. 24 (1983) 795–806.[3] A.M. Wazwaz, The tanh method for travelling wave solutions to the Zhiber–Shabat equation and other related equations, Commun. Nonlinear Sci.Numer. Simul. 13 (2008) 584–592.
[4] Y.N. Tang, W. Xu, J.W. Shen, L. Gao, Bifurcations of traveling wave solutions for Zhiber–Shabat equation, Nonlinear Anal. 67 (2007) 648–656.[5] A. Fordy, A. Pickering, Analysing negative resonances in the Painleve test, Phys. Lett. A 160 (1980) 347–354.[6] J.B. Li, H.H. Dai, On the Study of Singular Nonlinear Traveling Wave Equation: Dynamical System Approach, Science Press, Bejing, 2007.[7] B. He, J.B. Li, Y. Long, W.G. Rui, Bifurcations of travelling wave solutions for a variant of Camassa-Holm equation, Nonlinear Anal. Real World Appl. 9(2008) 222–232.
[8] P.F. Byrd, M.D. Friedman, Handbook of Elliptic Integrals for Engineers and Physicists, Springer-Verlag, 1971.