Neural Networks Reading: Chapter 3 in Nilsson text Lab: Work on assignment 2 (due 19th in class)
24
Neural Networks Reading: Chapter 3 in Nilsson text Lab: Work on assignment 2 (due 19th in class)
-
date post
21-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of Neural Networks Reading: Chapter 3 in Nilsson text Lab: Work on assignment 2 (due 19th in class)

Neural Networks
Reading: Chapter 3 in Nilsson text
Lab: Work on assignment 2 (due 19th in class)

The Brain -- A Paradox
The brain consists of 10^11 neurons, each of which is connected to 10^4 neighbors
Each neuron is slow (1 millisecond to respond to new stimulus)
Yet, the brain is astonishingly fast at perceptual tasks (e.g. recognize a face)
The brain can also store and retrieve prodigious amounts of multi-media information
The brain uses a very different computing architecture: parallel distributed processing
A brief history of neural networks
1960-65: Perceptron model developed by Rosenblatt
1969: Perceptron model analyzed by Minksy and Papert
1975: Werbos thesis at Harvard lays the roots for multi-layer neural networks
1985: 2 vol. Book on parallel distributed processing 1990: Neural networks enter mainstream
applications (stock market, OCR, robotics)
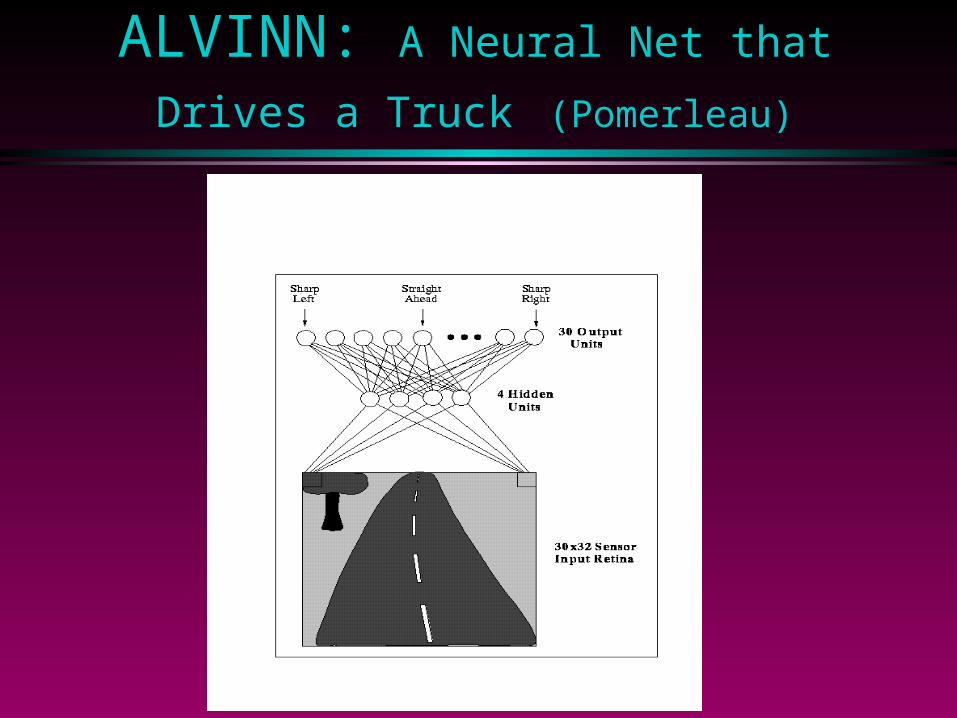
ALVINN: A Neural Net that Drives a
Truck (Pomerleau)

Object Recognition using Neural Networks
(Georgios Theocharous et al.)

Network learns to predict direction and distance to trash can

Training Methods
Single threshold-logic units: Perceptron training rule Widrow-hoff method
Gradient descent methods Arbitrary feedforward neural networks
Sigmoid activation function (smooth nonlinearity) Backpropagation algorithm

Threshold-logic Units
w1
w2
wn
Threshold(nonlinear)
Out
otherwise0
if11
f
xwf i
n
ii
x1
x2
xn
Inputs

TLU’s define hyperplane
Denote the input vector by X = (x0,x1,x2,…,xn)(Note n+1 inputs, where x0 is always set to 1)
Denote the weight vector by W = (w0,w1,…,wn) (note w0 is the threshold weight)
Output = 0 if X*W < 0, else Output = 1
For n=2, this is the equation of a line in 2D
w0 + w1*x1 + w2*x2 = 0x2 = -(w1/w2)*x1 + (-w0/w2)
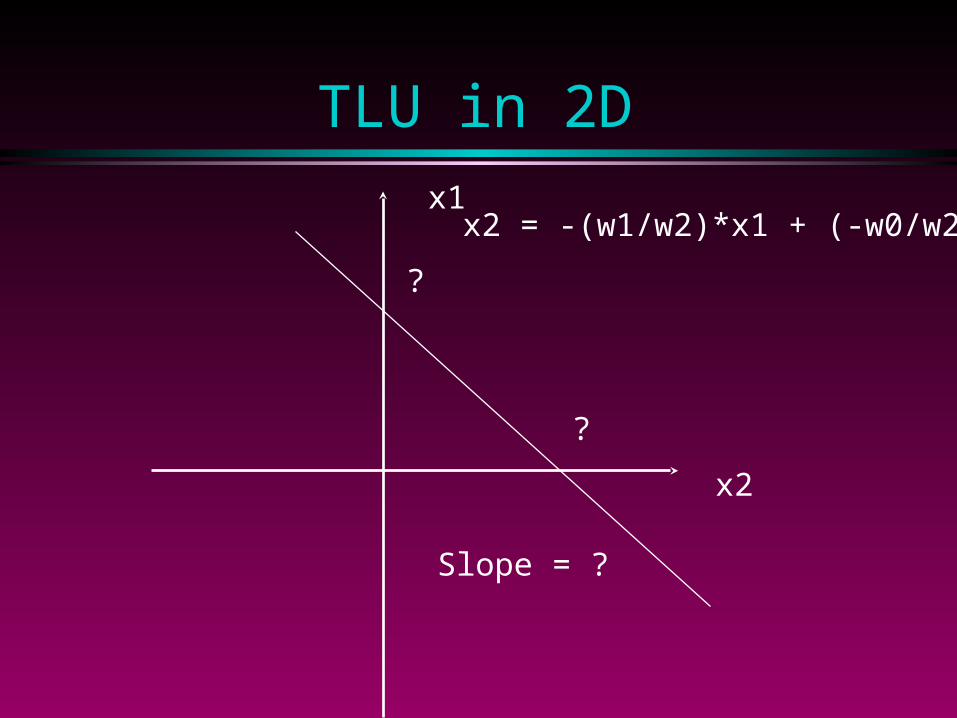
TLU in 2D
x2
x1
?
Slope = ?
?
x2 = -(w1/w2)*x1 + (-w0/w2)
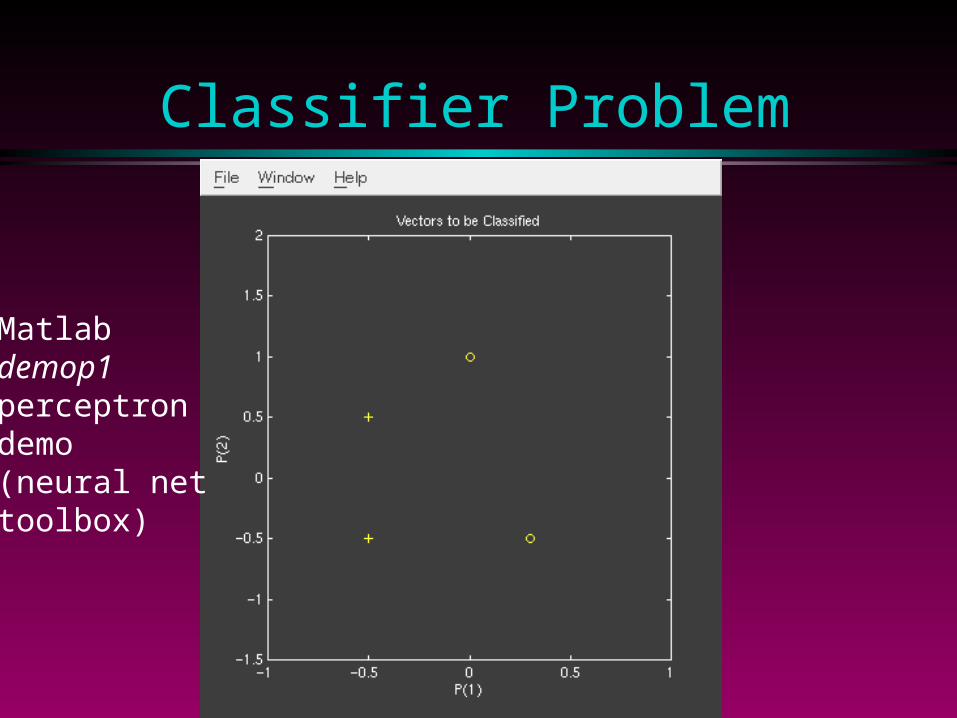
Classifier Problem
Matlabdemop1perceptrondemo (neural nettoolbox)

Initial Classifier
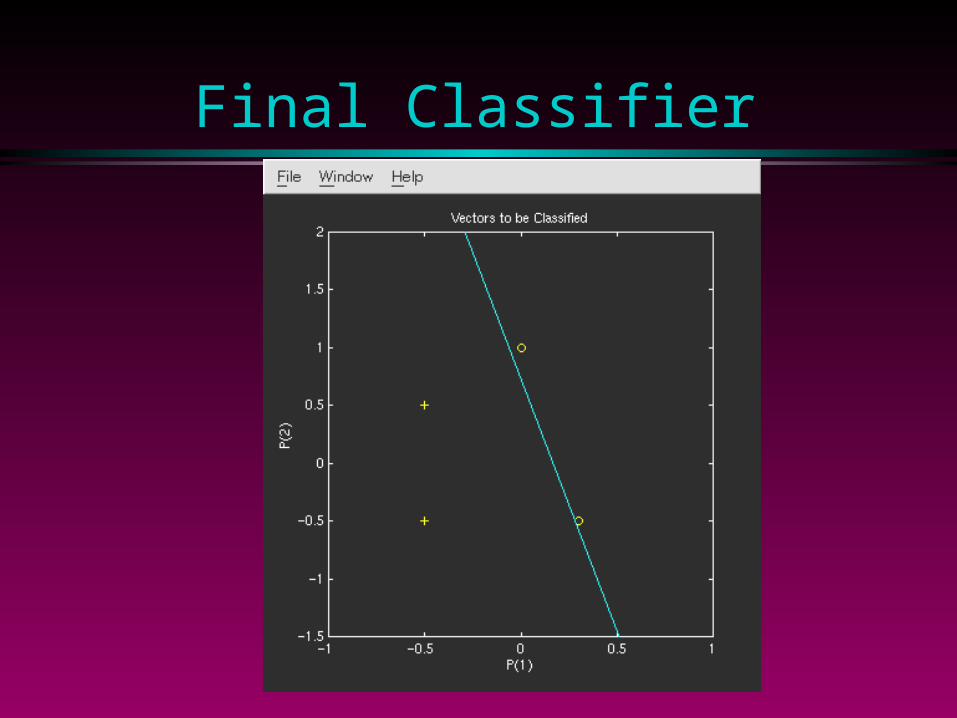
Final Classifier

Error Plot
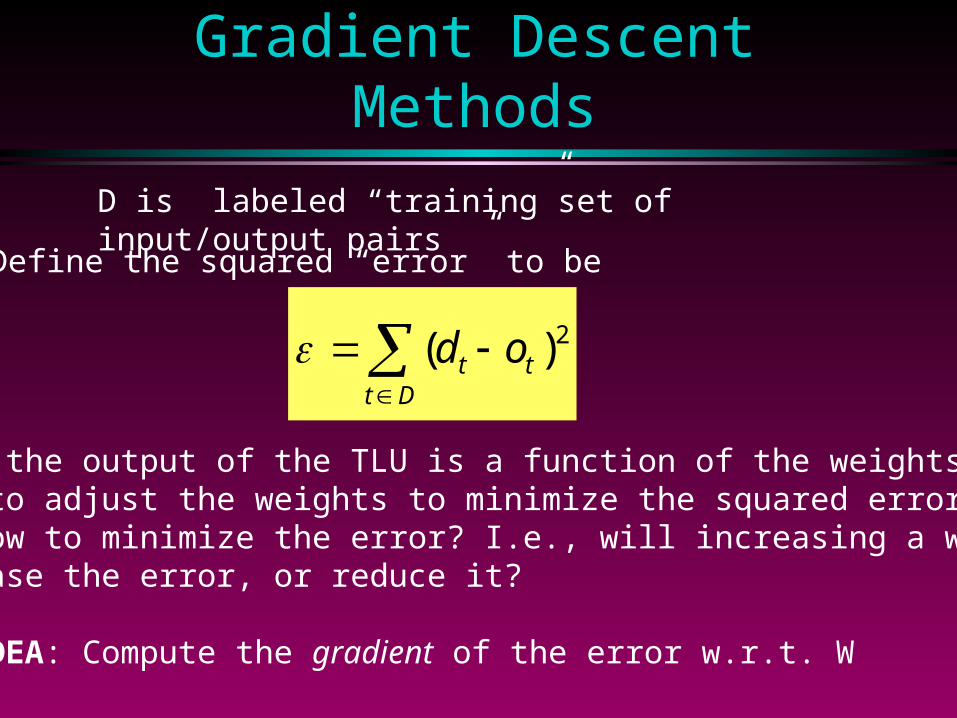
Gradient Descent Methods
Define the squared “error” to be
2)( tDt
t od
D is labeled “training”set of input/output pairs
Since the output of the TLU is a function of the weights W, we want to adjust the weights to minimize the squared error. But how to minimize the error? I.e., will increasing a weight increase the error, or reduce it?
KEY IDEA: Compute the gradient of the error w.r.t. W
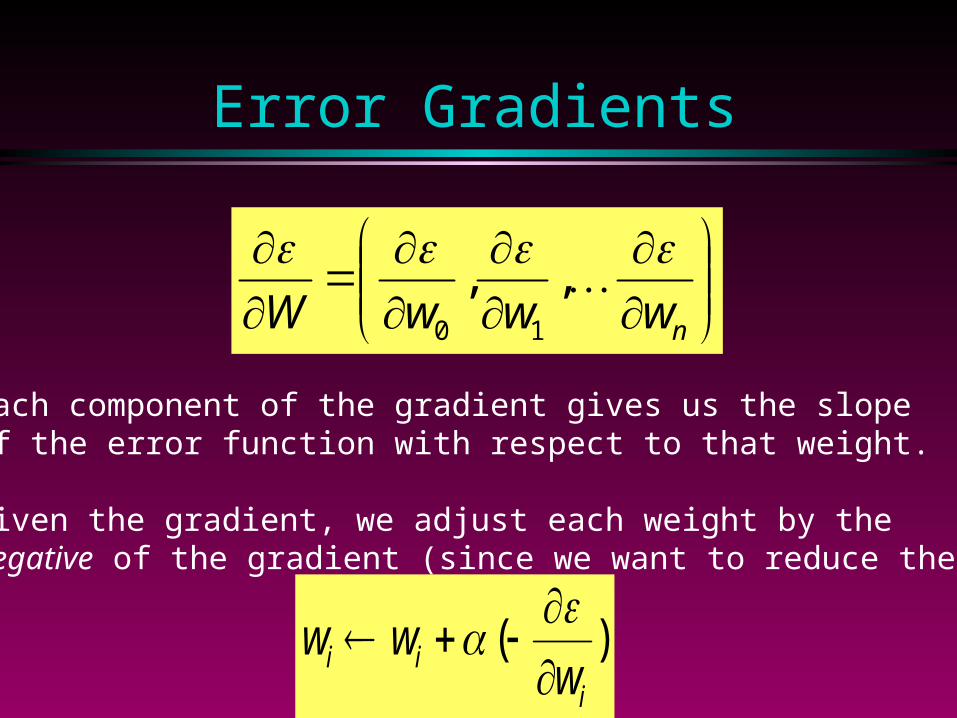
Error Gradients
nwwwW
,,
10
Each component of the gradient gives us the slopeof the error function with respect to that weight.
Given the gradient, we adjust each weight by thenegative of the gradient (since we want to reduce the error).
)(i
ii www

Learning by Gradient Descent
A boomboxwith manyunlabeled volume& tone controls
Sound output
Which way to turn each control to reduce the volume?
Antennainput
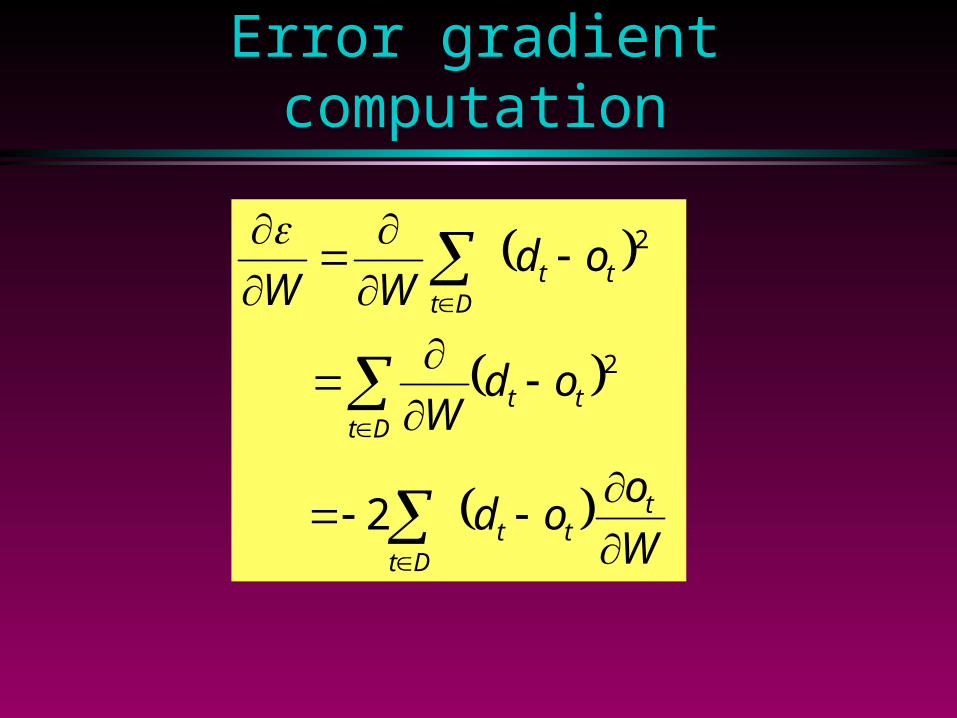
Error gradient computation
W
ood
odW
odWW
ttt
Dt
ttDt
ttDt
2
2
2
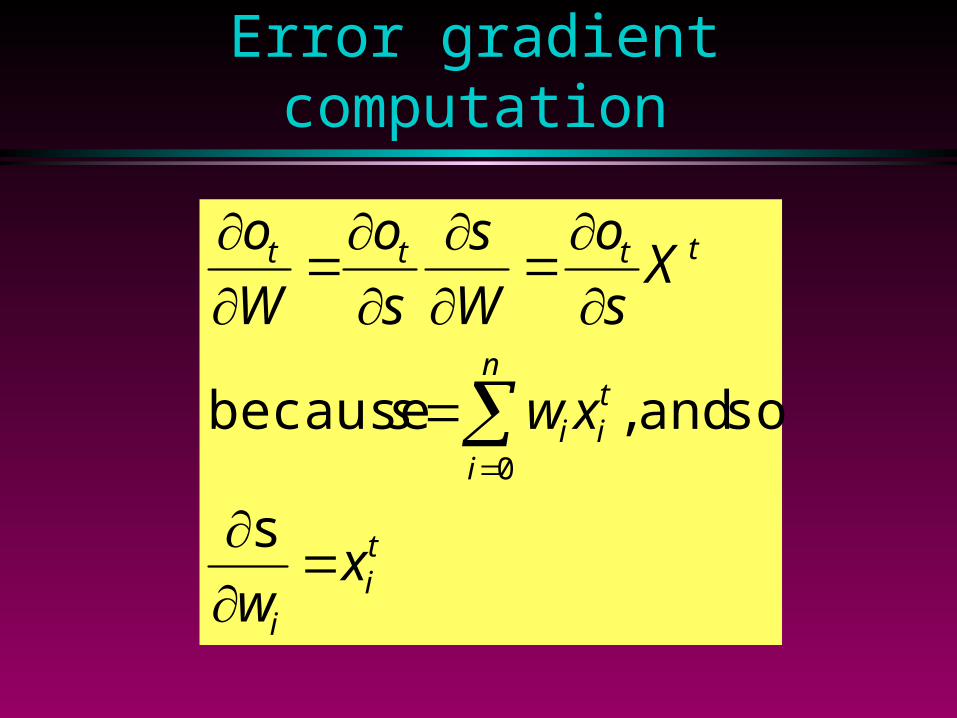
Error gradient computation
ti
i
ti
n
ii
tttt
xw
xws
Xs
o
W
s
s
o
W
o
s
so and ,because0

Threshold Units without thresholding
Let the output of the unit be simply be the weighted sum.We ignore the thresholding, and train the weights such thatan output of 1 is produced exactly, and an output of 0 isreplaced by an output of -1. In this case, we get that
1s
ot
tt
tt XodW
2
The error gradient then becomes

Widrow-Hoff Training Method(Batch)
1. Set the weights to small random values (e.g. between -.1 and .1)2. Set the learning rate to some small fixed positive value (.1). 3. Repeat // until training error is low enough Set error = 0; diff = 0; For each training example e begin error = error + square(d[e] - o[e]); for j=0 to N do diff = diff + (d[e] - o[e])*x[j,e]; end for j=0 to N do w[j] = w[j] + diff; // x[0,e] is always 1 until error < desired_value. 4. Store weight vector w in a file.
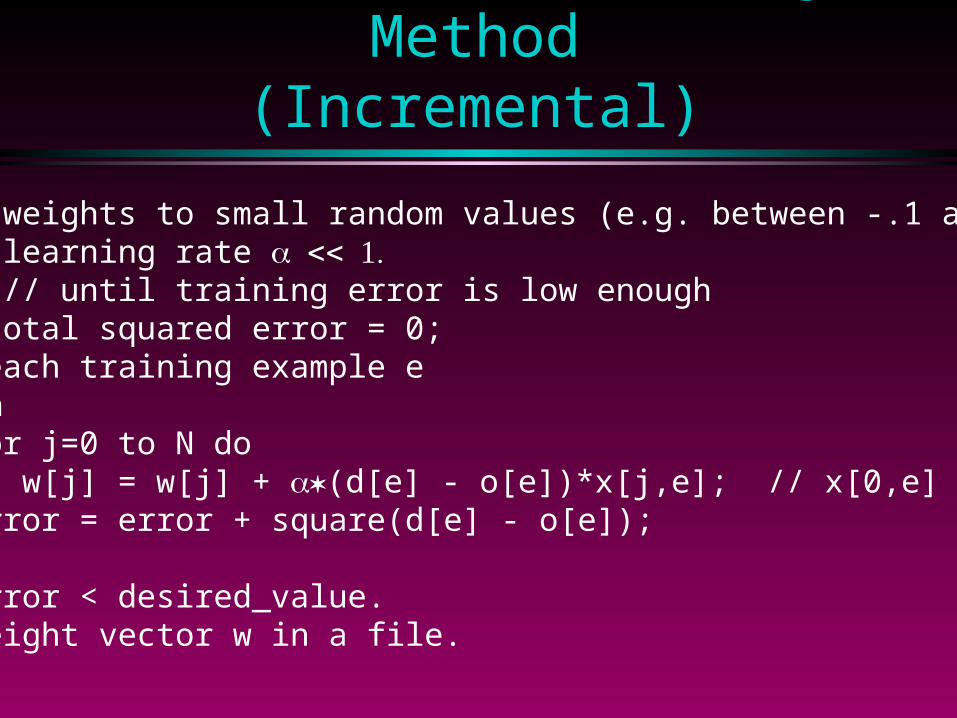
Widrow-Hoff Training Method(Incremental)
1. Set the weights to small random values (e.g. between -.1 and .1)2. Set the learning rate 3. Repeat // until training error is low enough Set total squared error = 0; For each training example e begin for j=0 to N do w[j] = w[j] + (d[e] - o[e])*x[j,e]; // x[0,e] is always 1 error = error + square(d[e] - o[e]); end until error < desired_value. 4. Store weight vector w in a file.
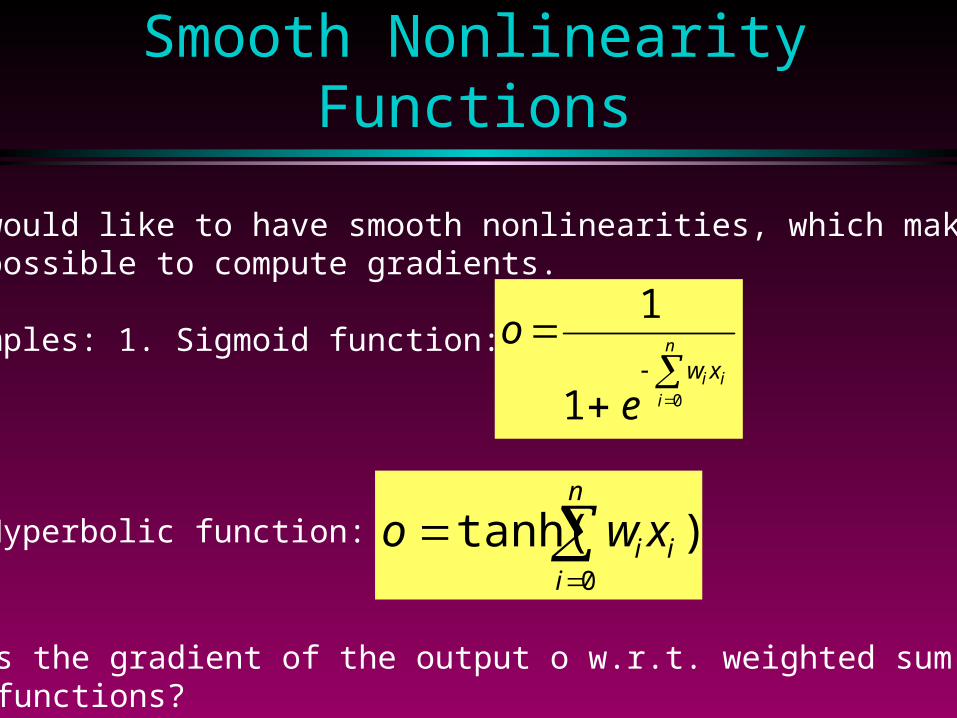
Smooth Nonlinearity Functions
We would like to have smooth nonlinearities, which makeit possible to compute gradients.
Examples: 1. Sigmoid function:
2. Hyperbolic function:
n
iiixw
e
o
01
1
)tanh(0
n
iiixwo
What is the gradient of the output o w.r.t. weighted sum s for these functions?
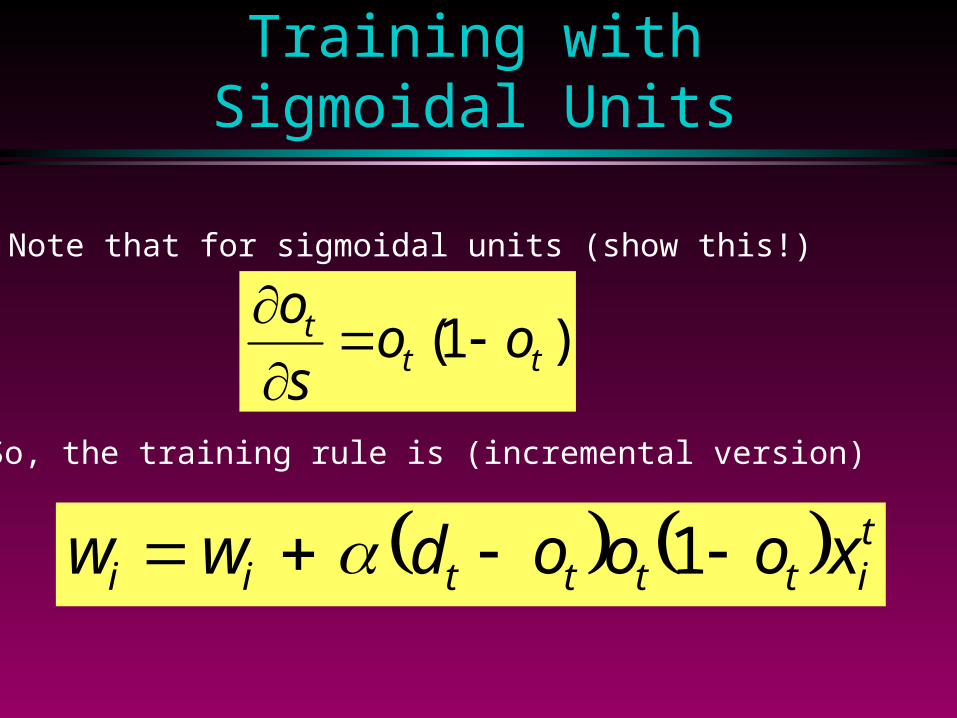
Training with Sigmoidal Units
Note that for sigmoidal units (show this!)
)1( ttt oos
o
So, the training rule is (incremental version)
tittttii xooodww 1