
Neural Networks - Penn Engineering › ~cis519 › fall2017 › lectures › 11_Neura… · •...
51
Neural Networks 1 Robot Image Credit: Viktoriya Sukhanova © 123RF.com These slides were assembled by Eric Eaton, with grateful acknowledgement of the many others who made their course materials freely available online. Feel free to reuse or adapt these slides for your own academic purposes, provided that you include proper attribution. Please send comments and corrections to Eric.
Transcript of Neural Networks - Penn Engineering › ~cis519 › fall2017 › lectures › 11_Neura… · •...

NeuralNetworks
1Robot Image Credit: Viktoriya Sukhanova © 123RF.com
These slides were assembled by Eric Eaton, with grateful acknowledgement of the many others who made their course materials freely available online. Feel free to reuse or adapt these slides for your own academic purposes, provided that you include proper attribution. Please send comments and corrections to Eric.

NeuralFunction• Brainfunction(thought)occursastheresultofthefiringofneurons
• Neuronsconnecttoeachotherthroughsynapses,whichpropagateactionpotential (electricalimpulses)byreleasingneurotransmitters– Synapsescanbeexcitatory(potential-increasing)orinhibitory(potential-decreasing),andhavevaryingactivationthresholds
– Learningoccursasaresultofthesynapses’ plasticicity:Theyexhibitlong-termchangesinconnectionstrength
• Thereareabout1011neuronsandabout1014synapsesinthehumanbrain!
2BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

BiologyofaNeuron
3
BrainStructure• Differentareasofthebrainhavedifferentfunctions
– Someareasseemtohavethesamefunctioninallhumans(e.g.,Broca’s regionformotorspeech);theoveralllayoutisgenerallyconsistent
– Someareasaremoreplastic,andvaryintheirfunction;also,thelower-levelstructureandfunctionvarygreatly
• Wedon’tknowhowdifferentfunctionsare“assigned” oracquired– Partlytheresultofthephysicallayout/connectiontoinputs(sensors)andoutputs(effectors)
– Partlytheresultofexperience(learning)
• Wereally don’tunderstandhowthisneuralstructureleadstowhatweperceiveas“consciousness” or“thought”
4BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

The“OneLearningAlgorithm”Hypothesis
5
Auditorycortexlearnstosee
AuditoryCortex
[Roeetal.,1992]
Somatosensorycortexlearnstosee
[Metin &Frost,1989]
SomatosensoryCortex
BasedonslidebyAndrewNg
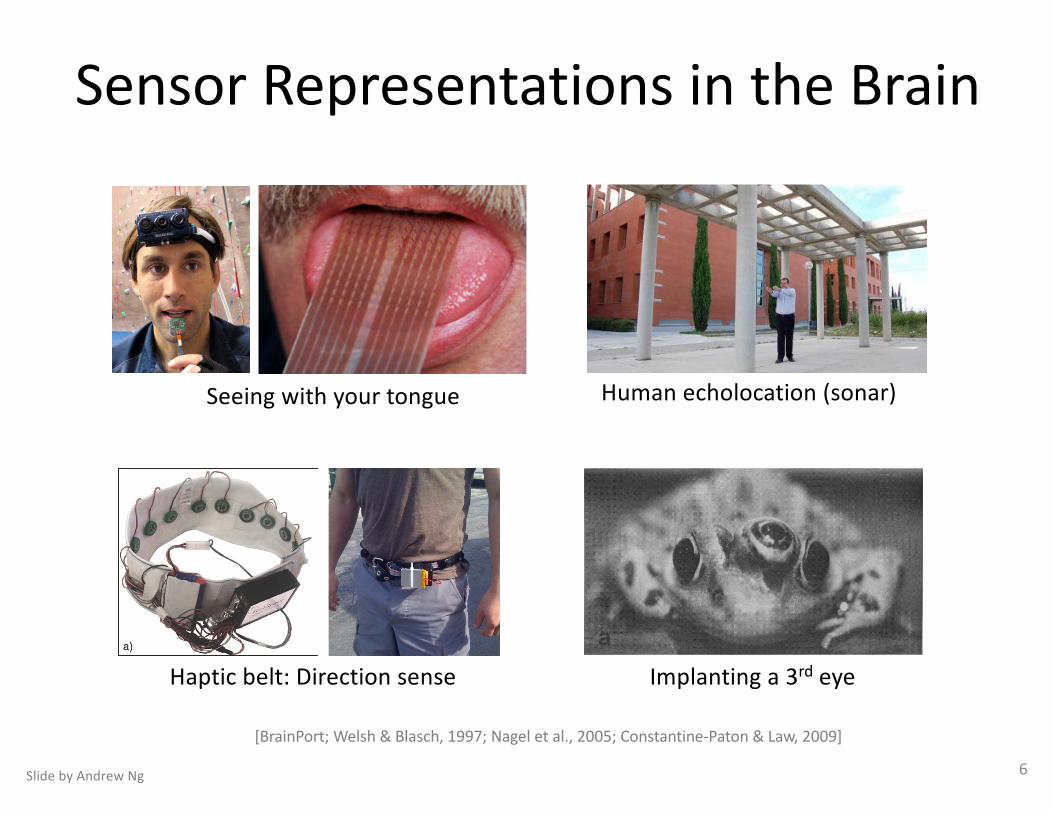
SensorRepresentationsintheBrain
6
Seeingwithyourtongue Humanecholocation(sonar)
Haptic belt:Directionsense Implantinga3rd eye
[BrainPort;Welsh&Blasch,1997;Nageletal.,2005;Constantine-Paton&Law,2009]
SlidebyAndrewNg

Comparisonofcomputingpower
• Computersarewayfasterthanneurons…• Buttherearealotmoreneuronsthanwecanreasonably
modelinmoderndigitalcomputers,andtheyallfireinparallel
• Neuralnetworksaredesignedtobemassivelyparallel• Thebrainiseffectivelyabilliontimesfaster
INFORMATIONCIRCA2012 Computer HumanBrainComputationUnits 10-coreXeon:109 Gates 1011 Neurons
StorageUnits 109 bitsRAM,1012 bitsdisk 1011 neurons,1014 synapses
Cycletime 10-9 sec 10-3 sec
Bandwidth 109 bits/sec 1014 bits/sec
7

NeuralNetworks• Origins:Algorithmsthattrytomimicthebrain.• Verywidelyusedin80sandearly90s;popularitydiminishedinlate90s.
• Recentresurgence:State-of-the-arttechniqueformanyapplications
• Artificialneuralnetworksarenotnearlyascomplexorintricateastheactualbrainstructure
8BasedonslidebyAndrewNg

Neuralnetworks
• Neuralnetworksaremadeupofnodes orunits,connectedbylinks
• Eachlinkhasanassociatedweight andactivationlevel• Eachnodehasaninputfunction (typicallysummingover
weightedinputs),anactivationfunction,andanoutput
Output units
Hidden units
Input unitsLayered feed-forward network
9BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

NeuronModel:LogisticUnit
10
Sigmoid(logistic)activationfunction: g(z) =1
1 + e�z
h✓(x) =1
1 + e�✓Tx
h✓(x) = g (✓|x)
x0 = 1x0 = 1
“biasunit”
h✓(x) =1
1 + e�✓Tx
x =
2
664
x0
x1
x2
x3
3
775 ✓ =
2
664
✓0✓1✓2✓3
3
775✓0
✓1
✓2
✓3
BasedonslidebyAndrewNg
X

h✓(x) =1
1 + e�✓Tx
NeuralNetwork
12
Layer3(OutputLayer)
Layer1(InputLayer)
Layer2(HiddenLayer)
x0 = 1biasunits a(2)0
SlidebyAndrewNg

Feed-Forward Process• Inputlayerunitsaresetbysomeexteriorfunction(thinkoftheseassensors),whichcausestheiroutputlinkstobeactivated atthespecifiedlevel
• Workingforwardthroughthenetwork,theinputfunction ofeachunitisappliedtocomputetheinputvalue– Usuallythisisjusttheweightedsumoftheactivationonthelinksfeedingintothisnode
• Theactivationfunction transformsthisinputfunctionintoafinalvalue– Typicallythisisanonlinear function,oftenasigmoidfunctioncorrespondingtothe“threshold” ofthatnode
13BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

NeuralNetwork
14
ai(j) = “activation”ofuniti inlayerjΘ(j) = weightmatrixcontrollingfunction
mappingfromlayerj tolayerj +1
Ifnetworkhassj unitsinlayerj andsj+1 unitsinlayerj+1,thenΘ(j) hasdimensionsj+1 × (sj+1) .
⇥(1) 2 R3⇥4 ⇥(2) 2 R1⇥4
SlidebyAndrewNg
h✓(x) =1
1 + e�✓Tx
⇥(1) ⇥(2)
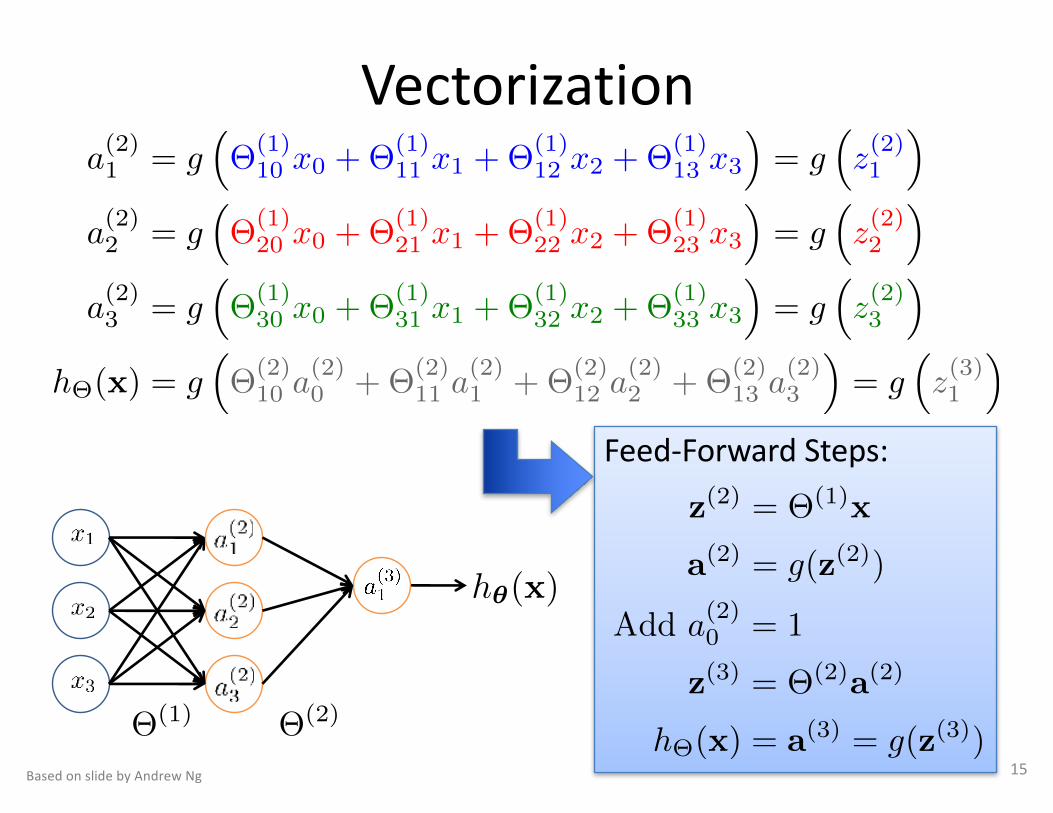
Feed-ForwardSteps:
Vectorization
15
a
(2)1 = g
⇣⇥(1)
10 x0 +⇥(1)11 x1 +⇥(1)
12 x2 +⇥(1)13 x3
⌘= g
⇣z
(2)1
⌘
a
(2)2 = g
⇣⇥(1)
20 x0 +⇥(1)21 x1 +⇥(1)
22 x2 +⇥(1)23 x3
⌘= g
⇣z
(2)2
⌘
a
(2)3 = g
⇣⇥(1)
30 x0 +⇥(1)31 x1 +⇥(1)
32 x2 +⇥(1)33 x3
⌘= g
⇣z
(2)3
⌘
h⇥(x) = g
⇣⇥(2)
10 a(2)0 +⇥(2)
11 a(2)1 +⇥(2)
12 a(2)2 +⇥(2)
13 a(2)3
⌘= g
⇣z
(3)1
⌘
a
(2)1 = g
⇣⇥(1)
10 x0 +⇥(1)11 x1 +⇥(1)
12 x2 +⇥(1)13 x3
⌘= g
⇣z
(2)1
⌘
a
(2)2 = g
⇣⇥(1)
20 x0 +⇥(1)21 x1 +⇥(1)
22 x2 +⇥(1)23 x3
⌘= g
⇣z
(2)2
⌘
a
(2)3 = g
⇣⇥(1)
30 x0 +⇥(1)31 x1 +⇥(1)
32 x2 +⇥(1)33 x3
⌘= g
⇣z
(2)3
⌘
h⇥(x) = g
⇣⇥(2)
10 a(2)0 +⇥(2)
11 a(2)1 +⇥(2)
12 a(2)2 +⇥(2)
13 a(2)3
⌘= g
⇣z
(3)1
⌘
a
(2)1 = g
⇣⇥(1)
10 x0 +⇥(1)11 x1 +⇥(1)
12 x2 +⇥(1)13 x3
⌘= g
⇣z
(2)1
⌘
a
(2)2 = g
⇣⇥(1)
20 x0 +⇥(1)21 x1 +⇥(1)
22 x2 +⇥(1)23 x3
⌘= g
⇣z
(2)2
⌘
a
(2)3 = g
⇣⇥(1)
30 x0 +⇥(1)31 x1 +⇥(1)
32 x2 +⇥(1)33 x3
⌘= g
⇣z
(2)3
⌘
h⇥(x) = g
⇣⇥(2)
10 a(2)0 +⇥(2)
11 a(2)1 +⇥(2)
12 a(2)2 +⇥(2)
13 a(2)3
⌘= g
⇣z
(3)1
⌘
a
(2)1 = g
⇣⇥(1)
10 x0 +⇥(1)11 x1 +⇥(1)
12 x2 +⇥(1)13 x3
⌘= g
⇣z
(2)1
⌘
a
(2)2 = g
⇣⇥(1)
20 x0 +⇥(1)21 x1 +⇥(1)
22 x2 +⇥(1)23 x3
⌘= g
⇣z
(2)2
⌘
a
(2)3 = g
⇣⇥(1)
30 x0 +⇥(1)31 x1 +⇥(1)
32 x2 +⇥(1)33 x3
⌘= g
⇣z
(2)3
⌘
h⇥(x) = g
⇣⇥(2)
10 a(2)0 +⇥(2)
11 a(2)1 +⇥(2)
12 a(2)2 +⇥(2)
13 a(2)3
⌘= g
⇣z
(3)1
⌘
BasedonslidebyAndrewNg
z
(2) = ⇥(1)x
a
(2) = g(z(2))
Add a(2)0 = 1
z
(3) = ⇥(2)a
(2)
h⇥(x) = a
(3) = g(z(3))
z
(2) = ⇥(1)x
a
(2) = g(z(2))
Add a(2)0 = 1
z
(3) = ⇥(2)a
(2)
h⇥(x) = a
(3) = g(z(3))
z
(2) = ⇥(1)x
a
(2) = g(z(2))
Add a(2)0 = 1
z
(3) = ⇥(2)a
(2)
h⇥(x) = a
(3) = g(z(3))⇥(1) ⇥(2)
h✓(x) =1
1 + e�✓Tx

OtherNetworkArchitectures
L denotesthenumberoflayers
containsthenumbersofnodesateachlayer– Notcountingbiasunits– Typically,s0 = d (#inputfeatures)andsL-1=K (#classes)
16
Layer3Layer1 Layer2 Layer4
h✓(x) =1
1 + e�✓Tx
s 2 N+L
s =[3,3,2,1]

MultipleOutputUnits:One-vs-Rest
17
Pedestrian Car Motorcycle Truck
h⇥(x) 2 RK
whenpedestrianwhencarwhenmotorcyclewhentruck
h⇥(x) ⇡
2
664
0001
3
775h⇥(x) ⇡
2
664
0010
3
775h⇥(x) ⇡
2
664
0100
3
775h⇥(x) ⇡
2
664
1000
3
775
Wewant:
SlidebyAndrewNg

MultipleOutputUnits:One-vs-Rest
• Given{(x1,y1), (x2,y2), ..., (xn,yn)}• Mustconvertlabelsto1-of-K representation
– e.g.,whenmotorcycle,whencar,etc.18
h⇥(x) 2 RK
whenpedestrianwhencarwhenmotorcyclewhentruck
h⇥(x) ⇡
2
664
0001
3
775h⇥(x) ⇡
2
664
0010
3
775h⇥(x) ⇡
2
664
0100
3
775h⇥(x) ⇡
2
664
1000
3
775
Wewant:
yi =
2
664
0100
3
775yi =
2
664
0010
3
775
BasedonslidebyAndrewNg

NeuralNetworkClassification
19
Binaryclassificationy =0or1
1outputunit(sL-1= 1)
Multi-classclassification (K classes)
K outputunits(sL-1= K)
y 2 RK
pedestriancarmotorcycletruck
e.g.,,,
Given:{(x1,y1), (x2,y2), ..., (xn,yn)}
contains#nodesateachlayer– s0 = d (#features)
s 2 N+L
SlidebyAndrewNg

UnderstandingRepresentations
20

RepresentingBooleanFunctions
21
Simpleexample:AND
x1 x2 hΘ(x)0 00 11 01 1
g(z) =1
1 + e�z
Logistic/SigmoidFunction
hΘ(x) = g(-30 + 20x1 + 20x2)
-30
+20
+20h✓(x) =
1
1 + e�✓Tx
BasedonslideandexamplebyAndrewNg
x1 x2 hΘ(x)0 0 g(-30) ≈00 1 g(-10) ≈01 0 g(-10) ≈01 1 g(10) ≈1

RepresentingBooleanFunctions
22
-10
+20+20
h✓(x) =1
1 + e�✓Tx
OR-30
+20+20
h✓(x) =1
1 + e�✓Tx
AND
+10
-20h✓(x) =
1
1 + e�✓Tx
NOT+10
-20-20
h✓(x) =1
1 + e�✓Tx
(NOTx1)AND(NOTx2)

CombiningRepresentationstoCreateNon-LinearFunctions
23
-10+20+20
h✓(x) =1
1 + e�✓Tx
OR-30
+20+20
h✓(x) =1
1 + e�✓Tx
AND+10
-20-20
h✓(x) =1
1 + e�✓Tx
(NOTx1)AND(NOTx2)
III
III IV
not(XOR)-10
+20
+20h✓(x) =
1
1 + e�✓Tx
-30+20
+20 inI
+10-20
-20
inIII I or III
BasedonexamplebyAndrewNg

LayeringRepresentations
Eachimageis“unrolled”intoavectorx ofpixelintensities
24
20× 20pixelimagesd =40010classes
x1 ... x20x21 ... x40x41 ... x60
x381 ... x400
...
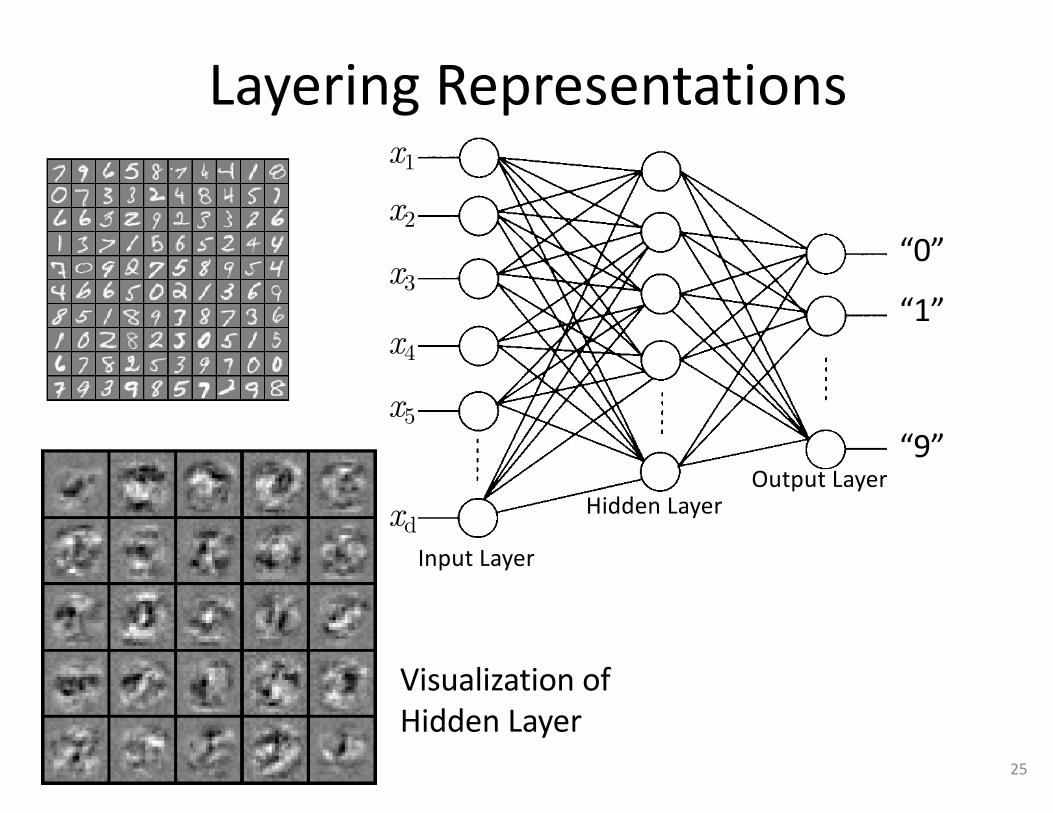
LayeringRepresentations
25
x1
x2
x3
x4
x5
xd
“0”
“1”
“9”
InputLayer
OutputLayerHiddenLayer
VisualizationofHiddenLayer

26
LeNet 5Demonstration:http://yann.lecun.com/exdb/lenet/

NeuralNetworkLearning
27

PerceptronLearningRule
Equivalenttotheintuitiverules:– Ifoutputiscorrect,don’tchangetheweights– Ifoutputislow(h(x)=0,y =1),incrementweightsforalltheinputswhichare1
– Ifoutputishigh(h(x)=1,y =0),decrementweightsforallinputswhichare1
PerceptronConvergenceTheorem:• Ifthereisasetofweightsthatisconsistentwiththetraining
data(i.e.,thedataislinearlyseparable),theperceptronlearningalgorithmwillconverge[Minicksy &Papert,1969]
29
✓ ✓ + ↵(y � h(x))x
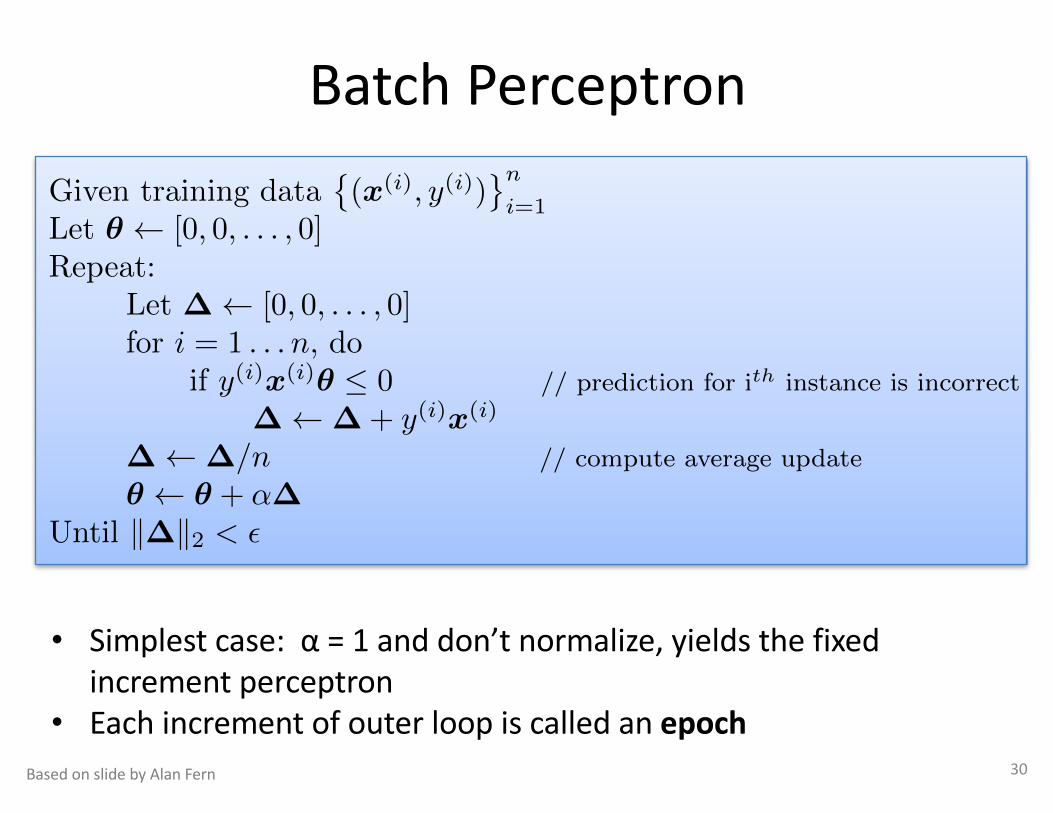
BatchPerceptron
30
1.) Given training data
�(x
(i), y(i)) n
i=12.) Let ✓ [0, 0, . . . , 0]2.) Repeat:
2.) Let � [0, 0, . . . , 0]3.) for i = 1 . . . n, do4.) if y(i)x(i)
✓ 0 // prediction for i
thinstance is incorrect
5.) � �+ y(i)x(i)
6.) � �/n // compute average update
6.) ✓ ✓ + ↵�8.) Until k�k2 < ✏
• Simplestcase:α=1anddon’tnormalize,yieldsthefixedincrementperceptron
• EachincrementofouterloopiscalledanepochBasedonslidebyAlanFern

LearninginNN:Backpropagation• Similartotheperceptronlearningalgorithm,wecyclethroughourexamples– Iftheoutputofthenetworkiscorrect,nochangesaremade– Ifthereisanerror,weightsareadjustedtoreducetheerror
• Thetrickistoassesstheblamefortheerroranddivideitamongthecontributingweights
31BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

J(✓) = � 1
n
nX
i=1
[yi log h✓(xi) + (1� yi) log (1� h✓(xi))] +�
2n
dX
j=1
✓2j
CostFunction
32
LogisticRegression:
NeuralNetwork:
h⇥ 2 RK(h⇥(x))i = ithoutput
J(⇥) =� 1
n
"nX
i=1
KX
k=1
yik log (h⇥(xi))k + (1� yik) log⇣1� (h⇥(xi))k
⌘#
+
�
2n
L�1X
l=1
sl�1X
i=1
slX
j=1
⇣⇥
(l)ji
⌘2
h⇥ 2 RK(h⇥(x))i = ithoutput
J(⇥) =� 1
n
"nX
i=1
KX
k=1
yik log (h⇥(xi))k + (1� yik) log⇣1� (h⇥(xi))k
⌘#
+
�
2n
L�1X
l=1
sl�1X
i=1
slX
j=1
⇣⇥
(l)ji
⌘2
h⇥ 2 RK(h⇥(x))i = ithoutput
J(⇥) =� 1
n
"nX
i=1
KX
k=1
yik log (h⇥(xi))k + (1� yik) log⇣1� (h⇥(xi))k
⌘#
+
�
2n
L�1X
l=1
sl�1X
i=1
slX
j=1
⇣⇥
(l)ji
⌘2 kth class: true,predictednotkth class: true,predicted
BasedonslidebyAndrewNg

OptimizingtheNeuralNetwork
33
Needcodetocompute:••
Solvevia:
J(⇥) =� 1
n
"nX
i=1
KX
k=1
yik log(h⇥(xi))k + (1� yik) log⇣1� (h⇥(xi))k
⌘#
+
�
2n
L�1X
l=1
sl�1X
i=1
slX
j=1
⇣⇥
(l)ji
⌘2
J(Θ) isnotconvex,soGDonaneuralnetyieldsalocaloptimum• But,tendstoworkwellinpractice
BasedonslidebyAndrewNg
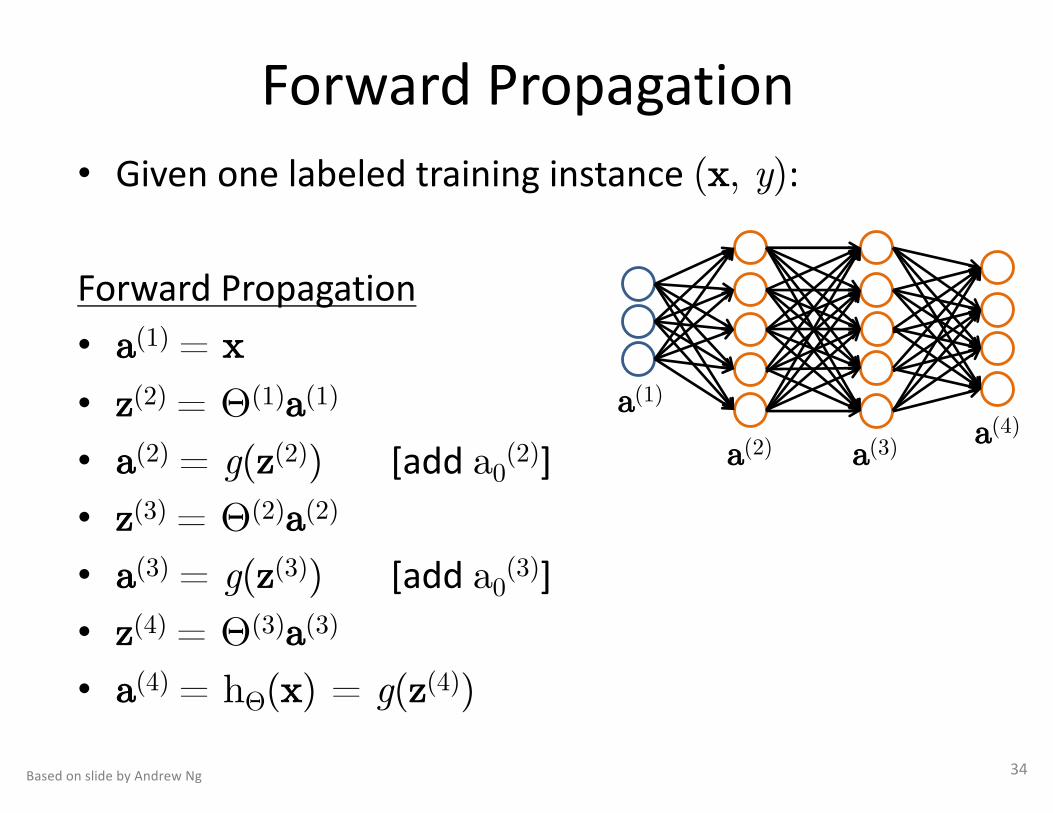
ForwardPropagation• Givenonelabeledtraininginstance(x, y):
ForwardPropagation• a(1) = x• z(2) = Θ(1)a(1)
• a(2) = g(z(2)) [adda0(2)]
• z(3) = Θ(2)a(2)
• a(3) = g(z(3)) [adda0(3)]
• z(4) = Θ(3)a(3)
• a(4) = hΘ(x) = g(z(4))
34
a(1)
a(2) a(3) a(4)
BasedonslidebyAndrewNg

Backpropagation Intuition• Eachhiddennodej is“responsible” forsomefractionoftheerrorδj(l) ineachoftheoutputnodestowhichitconnects
• δj(l) isdividedaccordingtothestrengthoftheconnectionbetweenhiddennodeandtheoutputnode
• Then,the“blame”ispropagatedbacktoprovidetheerrorvaluesforthehiddenlayer
35BasedonslidebyT.Finin,M.desJardins,LGetoor,R.Par

�(l)j =
@
@z(l)j
cost(xi)
where cost(xi) = yi log h⇥(xi) + (1� yi) log(1� h⇥(xi))
Backpropagation Intuition
δj(l) = “error”ofnodej inlayerlFormally,
36
�(4)1�(3)1�(2)1
�(2)2 �(3)2
BasedonslidebyAndrewNg

Backpropagation Intuition
δj(l) = “error”ofnodej inlayerlFormally,
37
�(4)1�(3)1�(2)1
�(2)2 �(3)2
BasedonslidebyAndrewNg
δ(4) = a(4) – y
�(l)j =
@
@z(l)j
cost(xi)
where cost(xi) = yi log h⇥(xi) + (1� yi) log(1� h⇥(xi))

Backpropagation Intuition
δj(l) = “error”ofnodej inlayerlFormally,
38
�(4)1�(3)1�(2)1
�(2)2 �(3)2
⇥(3)12
δ2(3) = Θ12(3)×δ1(4)
BasedonslidebyAndrewNg
�(l)j =
@
@z(l)j
cost(xi)
where cost(xi) = yi log h⇥(xi) + (1� yi) log(1� h⇥(xi))

Backpropagation Intuition
δj(l) = “error”ofnodej inlayerlFormally,
39
�(3)1�(2)1
�(2)2 �(3)2
δ2(3) = Θ12(3) ×δ1(4)
δ1(3) = Θ11(3)×δ1(4)
�(4)1
BasedonslidebyAndrewNg
�(l)j =
@
@z(l)j
cost(xi)
where cost(xi) = yi log h⇥(xi) + (1� yi) log(1� h⇥(xi))

Backpropagation Intuition
δj(l) = “error”ofnodej inlayerlFormally,
40
�(4)1�(3)1�(2)1
�(2)2 �(3)2
⇥(2)12
⇥(2)22
δ2(2) = Θ12(2)×δ1(3) +Θ22
(2)×δ2(3)
BasedonslidebyAndrewNg
�(l)j =
@
@z(l)j
cost(xi)
where cost(xi) = yi log h⇥(xi) + (1� yi) log(1� h⇥(xi))
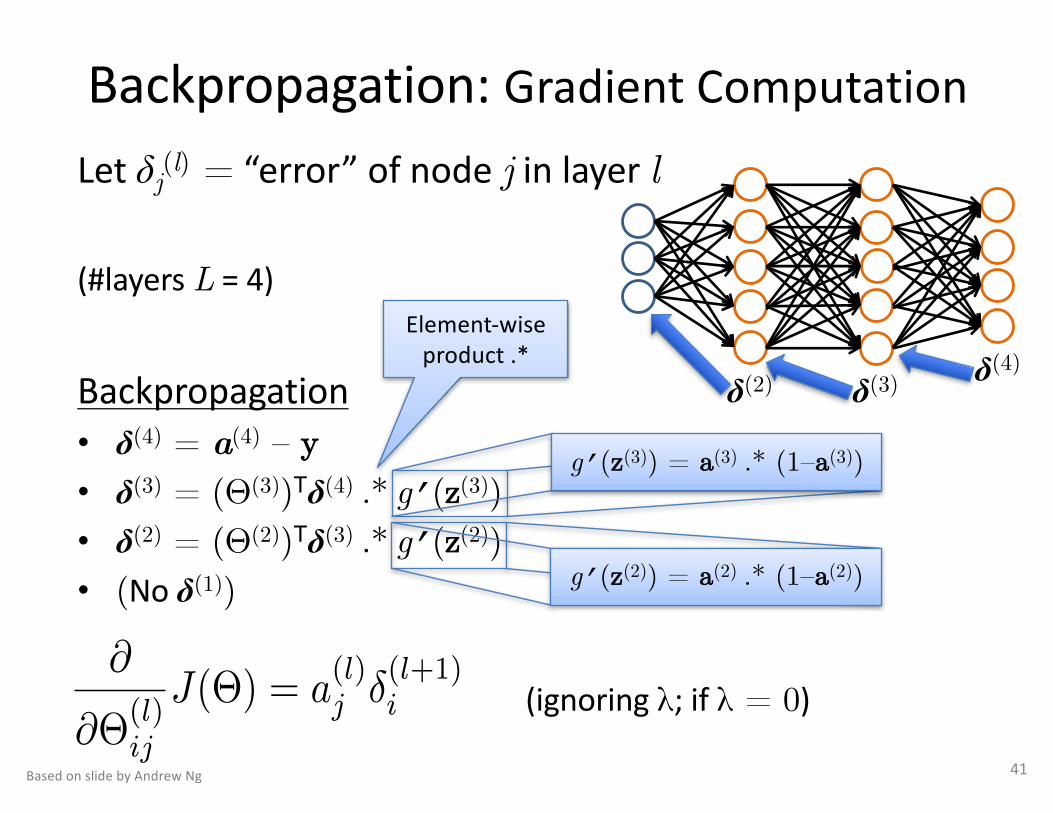
Backpropagation:GradientComputationLetδj(l) = “error”ofnodej inlayerl
(#layersL =4)
Backpropagation• δ(4) = a(4) – y• δ(3) = (Θ(3))Tδ(4) .* g’(z(3)) • δ(2) = (Θ(2))Tδ(3) .* g’(z(2))• (Noδ(1))
41
g’(z(3)) = a(3) .* (1–a(3))
g’(z(2)) = a(2) .* (1–a(2))
@
@⇥(l)ij
J(⇥) = a(l)j �(l+1)i (ignoringλ;ifλ = 0)
δ(4)δ(3)δ(2)
Element-wiseproduct.*
BasedonslidebyAndrewNg

Backpropagation
42
Note:Canvectorize as�(l)
ij = �(l)ij + a(l)j �(l+1)
i
�(l) = �(l) + �(l+1)a(l)|
�(l)ij = �(l)
ij + a(l)j �(l+1)i
�(l) = �(l) + �(l+1)a(l)|
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reachedD(l) isthematrixofpartialderivativesofJ(Θ)
BasedonslidebyAndrewNg
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached
(Usedtoaccumulategradient)
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached

TrainingaNeuralNetworkviaGradientDescentwithBackprop
43
Given: training set {(x1, y1), . . . , (xn, yn)}Initialize all ⇥(l) randomly (NOT to 0!)Loop // each iteration is called an epoch
Set �(l)ij = 0 8l, i, j
For each training instance (xi, yi):Set a(1) = xi
Compute {a(2), . . . ,a(L)} via forward propagationCompute �(L) = a
(L) � yiCompute errors {�(L�1), . . . , �(2)}Compute gradients �
(l)ij = �
(l)ij + a(l)j �(l+1)
i
Compute avg regularized gradient D(l)ij =
(1n�
(l)ij + �⇥(l)
ij if j 6= 01n�
(l)ij otherwise
Update weights via gradient step ⇥(l)ij = ⇥
(l)ij � ↵D(l)
ijUntil weights converge or max #epochs is reached
(Usedtoaccumulategradient)
BasedonslidebyAndrewNg
Backpropagation

Backprop Issues“Backprop isthecockroachofmachinelearning.It’sugly,andannoying,butyoujustcan’tgetridofit.”
-GeoffHinton
Problems:• blackbox• localminima
44

ImplementationDetails
45

RandomInitialization• Importanttorandomizeinitialweightmatrices• Can’thaveuniforminitialweights,asinlogisticregression
– Otherwise,allupdateswillbeidentical&thenetwon’tlearn
46
�(4)1�(3)1�(2)1
�(2)2 �(3)2

ImplementationDetails• Forconvenience,compressallparametersintoθ
– “unroll”Θ(1), Θ(2),... , Θ(L-1) intoonelongvectorθ• E.g.,ifΘ(1) is10x10,thenthefirst100entriesofθ containthevalueinΘ(1)
– Usethereshape commandtorecovertheoriginalmatrices• E.g.,ifΘ(1) is10x10,then
theta1 = reshape(theta[0:100], (10, 10))
• Eachstep,checktomakesurethatJ(θ) decreases
• Implementagradient-checkingproceduretoensurethatthegradientiscorrect...
47

J(✓i+c)
J(✓i�c)
✓i�c ✓i+c
GradientCheckingIdea: estimategradientnumericallytoverifyimplementation,thenturnoffgradientchecking
49
θi+c = [θ1, θ2, ..., θi –1, θi+c, θi+1, ...]
c ⇡ 1E-4@
@✓iJ(✓) ⇡ J(✓i+c)� J(✓i�c)
2c
J(✓)
ChangeONLYthei th
entryinθ,increasing(ordecreasing)itbyc
BasedonslidebyAndrewNg

GradientChecking
50
✓ 2 Rm ✓ is an “unrolled” version of ⇥
(1),⇥(2), . . .
✓ = [✓1, ✓2, ✓3, . . . , ✓m]
@
@✓1J(✓) ⇡ J([✓1 + c, ✓2, ✓3, . . . , ✓m])� J([✓1 � c, ✓2, ✓3, . . . , ✓m])
2c@
@✓2J(✓) ⇡ J([✓1, ✓2 + c, ✓3, . . . , ✓m])� J([✓1, ✓2 � c, ✓3, . . . , ✓m])
2c.
.
.
@
@✓mJ(✓) ⇡ J([✓1, ✓2, ✓3, . . . , ✓m + c])� J([✓1, ✓2, ✓3, . . . , ✓m � c])
2c
CheckthattheapproximatenumericalgradientmatchestheentriesintheDmatrices
PutinvectorcalledgradApprox
BasedonslidebyAndrewNg

ImplementationSteps• Implementbackprop tocomputeDVec
– DVec istheunrolled{D(1), D(2), ... }matrices
• ImplementnumericalgradientcheckingtocomputegradApprox• MakesureDVec hassimilarvaluestogradApprox• Turnoffgradientchecking.Usingbackprop codeforlearning.
Important:Besuretodisableyourgradientcheckingcodebeforetrainingyourclassifier.• Ifyourunthenumericalgradientcomputationoneveryiteration
ofgradientdescent,yourcodewillbevery slow
51BasedonslidebyAndrewNg
PuttingItAllTogether
52

TrainingaNeuralNetworkPickanetworkarchitecture(connectivitypatternbetweennodes)
• #inputunits=#offeaturesindataset• #outputunits=#classes
Reasonabledefault:1hiddenlayer• orif>1hiddenlayer,havesame#hiddenunitsineverylayer(usuallythemorethebetter)
53BasedonslidebyAndrewNg

TrainingaNeuralNetwork1. Randomlyinitializeweights2. ImplementforwardpropagationtogethΘ(xi)
foranyinstancexi
3. ImplementcodetocomputecostfunctionJ(Θ)4. Implementbackprop tocomputepartialderivatives
5. Usegradientcheckingtocomparecomputedusingbackpropagation vs.thenumericalgradientestimate.– Then,disablegradientcheckingcode
6. Usegradientdescentwithbackprop tofitthenetwork54BasedonslidebyAndrewNg






![Deep Parametric Continuous Convolutional Neural Networks€¦ · Graph Neural Networks: Graph neural networks (GNNs) [25] are generalizations of neural networks to graph structured](https://static.fdocuments.us/doc/165x107/5f7096c356401635d36dbe30/deep-parametric-continuous-convolutional-neural-networks-graph-neural-networks.jpg)











