
Network - University of Texas at Austinusers.ece.utexas.edu/~gerstl/ee445m_s16/lectures/Lec… ·...
15
EE445M/EE380L.6, Lecture 10 4/3/2016 J. Valvano, A. Gerstlauer 1 EE445M/EE360L.6 Embedded and Real-Time Systems/ Real-Time Operating Systems Lecture 10: Networking, CAN bus, Ethernet, Embedded Internet, TCP/IP Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6 1 Network • Collection of interfaces that share a physical medium and data protocol – Communicate & synchronize tasks across computers – Distributed computing Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6 2 TxD RxD B MSP430 UART UART Gnd Gnd TxD RxD SCI Gnd TxD A TM4C C TMS320 RxD TxD U1Rx U1Tx RxD TxD Figure 9.1. A simple ring network with three nodes, linked using the serial ports. Actuator Remote Processing Network Sensor Remote Processing Sensor Remote Processing Central Processing Remote Processing Actuator Sensor
Transcript of Network - University of Texas at Austinusers.ece.utexas.edu/~gerstl/ee445m_s16/lectures/Lec… ·...

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 1
EE445M/EE360L.6Embedded and Real-Time Systems/
Real-Time Operating Systems
Lecture 10:
Networking, CAN bus, Ethernet, Embedded Internet, TCP/IP
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
1
Network• Collection of interfaces that share a
physical medium and data protocol– Communicate & synchronize tasks
across computers
– Distributed computing
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
2
TxD
RxD
BMSP430UART UART
GndGnd
TxDRxD
SCIGnd
TxD
ATM4C
CTMS320
RxD
TxD U1Rx
U1Tx
RxD TxD
Figure 9.1. A simple ring network with three nodes, linked using the serial ports.
ActuatorRemoteProcessing
Network
SensorRemoteProcessing
SensorRemoteProcessing
CentralProcessing
RemoteProcessing
Actuator
Sensor

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 2
Network Topology
• Ring (previous slide)
• Shared bus
• Star
• Mesh
• …
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
3
Star
Mesh
Cluster treePAN coordinatorFull function deviceReduced function device
Figure 9.2. ZigBee wireless networks communicate by hopping between nodes.
Layered Approach
• Physical layer (frames)
• OS layer (message & packets)
• Application layer (sessions)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
4
Communication
Physical link
ThreadA
ThreadBMicrocontroller1
RTOS1
CAN
CAN
ThreadC
ThreadD
Microcontroller2
RTOS2
CAN
CAN
Messages
Frames
Figure 9.3. A layered approach to communication systems.

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 3
Framing and Messaging
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
5
Figure 9.19. An Ethernet frame can hold 46 to 1500 bytes.
1. Address information field– Physical address specifying destination/source computer– Logical address specifying destination/source processes
2. Synchronization or handshake field– Physical synchronization, e.g. shared clock, start/stop bits– OS/process synchronization, e.g. request/ack, semaphore
3. Data field– ASCII or binary (raw or compressed)
4. Error detection and correction field– Parity, checksum, error correcting codes (ECC)
Physical Layer
• Shannon channel capacityC = W log2 (1 + SNR) b/s
• Example: Telephone channelW = 3.4kHz and SNR ~ 38 dB => SNR ~ 6310
C = 3.4kHz log2 (6311) = 3.4kHz x 12.62 b/s = 42.9 kb/s
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
6
Transmitter
Data
Encoder
Channel
Energy
Receiver
Data
Decoder
Energy
Attenuation
Distortion
Noise
powernoiseAverage
powersignalAveragelog10SNR(dB)
10

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 4
Controller Area Network (CAN)
• Originally for use in automobiles (car area network)• High-integrity serial communications • Real-time applications• Up to 1 Mbits/second, up to 112 nodes• Half duplex (both directions, but only one at a time)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
7
LM3SCAN Controller
CANL CANH
Transceiver
SN65HVD1050D
SlopeControl
DriverControl
DominantDetect
Shutdown
POR
PD0/Rx PD1/Tx
LM3SCAN Controller
CANL CANH
Transceiver
SN65HVD1050D
SlopeControl
DriverControl
DominantDetect
Shutdown
POR
PD0/Rx PD1/Tx
LM3SCAN Controller
CANL CANH
Transceiver
SN65HVD1050D
SlopeControl
DriverControl
DominantDetect
Shutdown
POR
PD0/Rx PD1/Tx
120 120
1 2 112
CAN Bus
• Shared bus topology– Broadcast operation
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
8
Source: http://can-cia.org/index.php?id=can

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 5
CAN Interfacing
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
9
A transmission line if L > /4, = v/f ≈ v Slew rate = 25V/µs, v = VF*c = 2·108 m/s1V in 40 ns, = 2·108 m/s * 40*10-9s = 8m, /4 = 2m
There must be a 120 resistor on each end of the CAN cable, and no resistor on middle nodes.
Microchip MCP2551
• CAN Transceiver
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
10
http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010405http://ww1.microchip.com/downloads/en/DeviceDoc/21667f.pdf

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 6
CAN Signaling
• Wired-AND logic– Similar to wired-OR or open collector logic
– Dominant state is logic low (0)
– Recessive state is logic high (1)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
11
5V3.5V2.5V1.5V
0V
CANH
CANL
Recessive Dominant Recessive
Time
CAN Protocol
• Data, Remote, Error or Overload frames– Arbitration Field
• 11-bit identifier specifies data type (not address), e.g. Ping, IR, …• RTR=IDE=0 means 11-bit standard format data frame
– Control Field• DLC specifies the number of data bytes (0 to 8)
– Data Field• Contains zero to eight bytes of data
– CRC Field• 15-bit checksum used for error detection
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
12
Bus Idle Bus IdleArbitration field Control Data field CRC field ACK EOF IFS
Message Frame
SOF RTR Delimiter DelimiterSlot
r0IDE/r1
11-bit Identifier DLC Data (0-8 bytes) 15 bits
Figure 9.7. CAN Standard Format Data Frame.

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 7
CAN Arbitration• Bit-wise arbitration
– Priority handled by dominant win over recessive• Lower IDs are higher priority
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
13
Source: http://can-cia.org/index.php?id=can
CAN Bandwidth
• Number of bits in a CAN message frame– ID: 11 or 29 bits
• Standard CAN 2.0A vs. extended CAN 2.0B
– Data: 0, 8, 16, 24, 32, 40, 48, 56, or 64 bits– Remaining components: 36 bits
• SOF (1)• RTR (1)• IDE/r1 (1)• r0 (1)• DLC (4) • CRC (15)• ACK/EOF/intermission (13)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
14
Bandwidth = number of information bits/frame
total number of bits/frame • baud rate
How many bits in a frame:Standard CAN 2.0A frame with 4 data bytes? Extended CAN 2.0B frame with 8 data bytes?

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 8
CAN Synchronization• Synchronous bit transmission
– Where is the clock? (Answer: in the data)– Needs edges so the receiver can synchronize
• A long sequence of 0’s or a long sequence of 1’s
• Bit stuffing– Insert complementary bit after five equal bits
• CAN 2.0A may add 3+n stuff bits (n is number of bytes)
• CAN 2.0B may add 5+n stuff bits
– Receiver has to un-stuff
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
15
TM4C123 CAN Modules
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
16
• 2 CAN Modules– Message RAM
• 32 Msg. Objects
– Message Objects• Tx Objects
– One-time
– Remote request
• Rx Objects– Receive filters
– Can be concatenatedinto FIFOs

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 9
Simple CAN Network• TivaWare driver
– CANInit
– CANBitRateSet
– CANEnable
– CANIntEnable
– CANMessageSet
– CANIntStatus
– CANStatusGet
– CANMessageGet
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
17
CANbus
CAN0_SendData
LM3S8962
Switch
LEDCANISRCAN0_GetMail
NonBlock
ID=2
ID=4
CAN
CAN0_SendData
LM3S2110
Switch
LEDCANISRCAN0_GetMail
NonBlock
ID=4
ID=2
CAN
CAN_4C123.zip
CANBitRateSet(CAN0_BASE, 80000000, CAN_BITRATE);
Logic Analyzer Traces• Transmit Frame
• Receive Frame
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
18
Why did it take 130s to execute CAN_Transmit?Why does the RxCan have more stuff than the TxCan?
What is the total number of bits in this frame?Why did it take 110s to complete an entire frame?What is that blimp on TxCan?Where is the end of the frame?What is the bandwidth?

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 10
Synchronization Issues
• How to connect transmitter/receiver threads? – How to start, handshake
– Race conditions
• How to prevent streaming data from stalling?– Priority, buffer size
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
19
Ethernet• Bus-based topology
– Hub (repeater) or switch
• Physical layer– Many variants evolved over the years
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
20
A B C D
Ethernet switch
A BEthernet
Pin Color Pair Description1 white/orange 2 TxData +2 orange 2 TxData -3 white/green 3 RecvData +4 blue 1 Unused5 white/blue 1 Unused6 green 3 RecvData -7 white/brown 4 Unused8 brown 4 Unused
Table 9.2. Pin assignments on a 568-B Ethernet connector.

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 11
Ethernet Cabling
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
21
TxData+TxData-RecvData+UnusedUnusedRecvData-UnusedUnused
12345678
568-B
RecvData+RecvData-TxData+UnusedUnusedTxData-UnusedUnused
12345678
568-A
LM3S8962 Switch
Pair 2
Pair 3
Pair 1
Pair 4
TxData+TxData-RecvData+UnusedUnusedRecvData-UnusedUnused
12345678
568-B
12345678
568-B
LM3S8962 LM3S8962
TxData+TxData-RecvData+UnusedUnusedRecvData-UnusedUnused
Four twisted pairs
Figure 9.15. Ethernet cable between a microcontroller and a switch.
Figure 9.16. Ethernet cross-over cable between two microcontrollers.
Ethernet Protocol
• Ethernet Frame– Synchronization preamble (alternating 0/1)
– Start frame delimiter (SFD)
– Source & destination MAC addresses
– Type/length field
– Data
– CRC frame check sequence (FCS)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
22
EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 12
Media Access Control (MAC)
• Distributed arbitration protocol– Obsolete if centralized switches are used
• Carrier Sense Multiple Access with Collision Detection (CSMA/CD)– Sense free carrier before sending– Sense while transmitting to detect collision
• If collision, send jam signal
– Binary exponential backoff• Increment collision counter c• Wait random period in range 0…2c-1
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
23
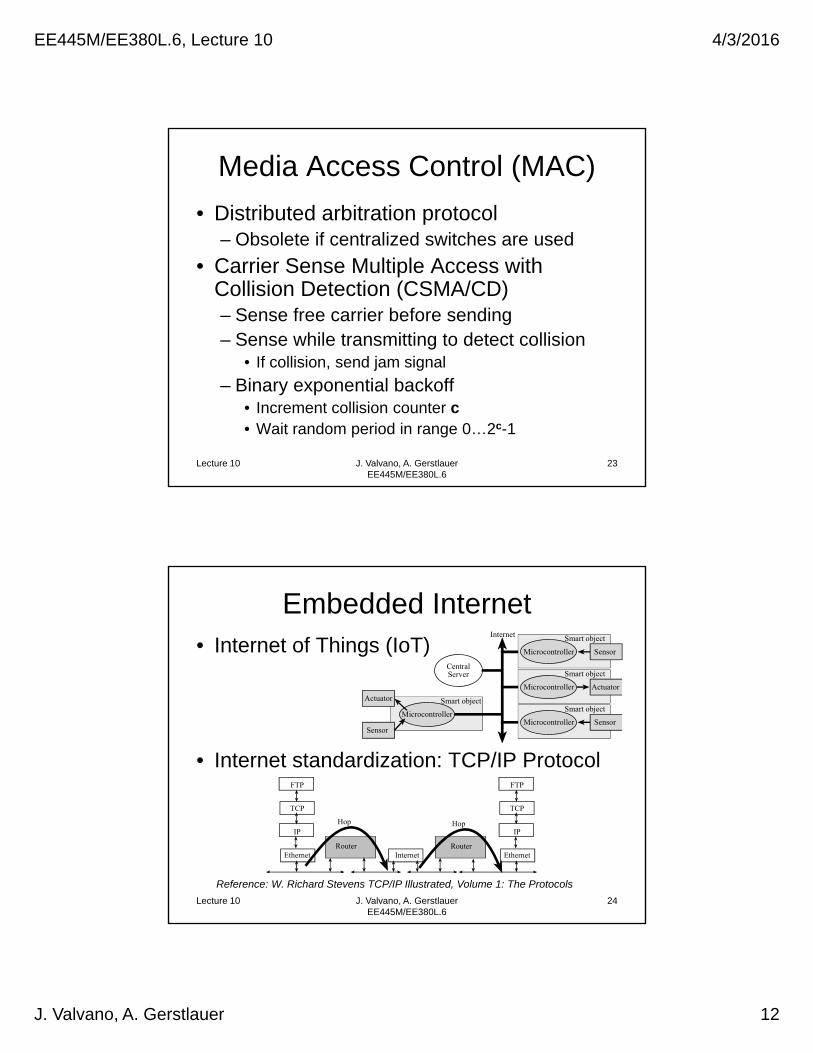
Embedded Internet• Internet of Things (IoT)
• Internet standardization: TCP/IP Protocol
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
24
FTP
TCP
IP
Ethernet Router
Internet Router
FTP
TCP
IP
Ethernet
Hop Hop
Microcontroller
Smart object
Internet
CentralServer
Actuator
Sensor
SensorMicrocontroller
Smart object
ActuatorMicrocontroller
Smart object
SensorMicrocontroller
Smart object
Reference: W. Richard Stevens TCP/IP Illustrated, Volume 1: The Protocols

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 13
ISO/OSI 7-Layer Model
• Abstraction– International
Standards Organization (ISO)
– Open Systems Interconnection (OSI)
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
25
User
Application layer
Presentation layer
Session layer
Transport layer
Network layer
Data link layer
Physical layer
User
Physical link
TCP/IP 4-Layer Realization
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
26
Application
Presentation
Session
Transport
Network
Data link
Physical
OSI
Application
Transport
Internet
Media AccessControl/Physical
Layers
TCP/IP
HTTP, Telnet,SMTP,FTP
TCP
TCP, UDP
IP, ICMP, IGMP
Ethernet, wifi
Examples

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 14
Message Protocols
• Transmission Control Protocol (TCP)• User Datagram Protocol (UDP)• Internet Protocol (IP)
– Domain Name System (DNS) – 32-bit IPv4 address
• 128-bit in IPv6
• Ethernet– Error checking – Padding– Payload
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
27
User Data
Applheader
User Data
TCPheader
Application Data
TCPheader
IPheader
Application Data
TCPheader
IPheader
Application DataEthernetheader
Ethernettrailer
Application
TCP
IP
Ethernet
TCP segment
IP datagram
Ethernetframe
22 20 20 4 bytes
46 to 1500 bytes
UDP and TCP• UDP single datagram (connectionless)
– 8-byte header
• TCP session stream (error & flow control)– 20-byte header
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
28
Source port: 16-bit number of the process that sent the packet, could be zeroDestination port: 16-bit number of the process to receive the packet.Length: 16-bit number specifying the size in bytes of the data to followChecksum: 16-bit modulo addition of all data, UDP header, and IP header
Source port: 16-bit number of the process that sent the packet, could be zeroDestination port: 16-bit number of the process to receive the packet.Sequence number: 32-bit number defining the position of this dataAcknowledgement: 32-bit number of the next data expected to be receivedHlen: 4-bit field of the header size (including options) divided by 4Flags: 6-bit field with FIN, SYN, RST, PSH, ACK, and URGWindow: 16-bit number specifying the number of bytes the receiver can acceptChecksum: 16-bit modulo addition of all data, TCP header, and IP headerUrgent pointer: 16-bit field pointing to a place in the stream urgently needed

EE445M/EE380L.6, Lecture 10 4/3/2016
J. Valvano, A. Gerstlauer 15
Application Protocols
• Client/server models– HTTP (web), FTP, Telnet, SSH, …
• Providing (device) services over the web– XML-based protocol: SOAP, WSDL
– Simpler REST-ful API styles• Request encoded in URL
• Return data using XML, JSON, … formats
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
29
Networking Summary
• Standardization is key– Communication standards
– Across levels/layers• Physical, OS, application
• IoT is an open playing field– Internet as well-established foundation
– Application-level standardization?• Embedded device-to-device interactions
Lecture 10 J. Valvano, A. Gerstlauer EE445M/EE380L.6
30


















